Область техники
Изобретение относится к устройству формирования изображений методом магнитного резонанса (MR) для тела, помещенного в объем исследования.
Кроме того, изобретение относится к способу формирования изображений методом MR и к компьютерной программе для MR устройства.
Предшествующий уровень техники
При формировании изображений методом MR последовательности, состоящие из RF сигналов (также упоминаемые как В1) и переключаемые градиенты магнитного поля прикладываются к объекту (пациенту), помещенному в однородное магнитное поле в пределах объема исследования MR устройства. Таким образом, генерируются MR сигналы, которые сканируются посредством RF приемных антенн, чтобы получить информацию от объекта и восстановить его изображения. С его начального развития число клинически релевантных областей применения формирования изображений методом MR выросло чрезвычайно. Формирование изображений методом MR может применяться почти к каждой части тела, и оно может использоваться для получения информации о ряде важных функций человеческого тела. Последовательность формирования изображений, которая применяется в процессе MR сканирования, играет существенную роль в определении характеристик реконструируемого изображения, таких как местоположение и ориентация в объекте, измерения, разрешение, отношение сигнала к шуму, контраст, чувствительность для движений и т.д. Оператор устройства MRI должен выбрать соответствующую последовательность и должен настроить и оптимизировать ее параметры для соответствующего применения.
В предусматривающем вмешательство и интраоперационное формирование изображений методом MR объединены устройства высокоэффективного вычисления и новые терапевтические устройства. Эти методы позволяют выполнять широкий диапазон интерактивных MR-направляемых вмешательств и хирургических процедур. Важным вопросом интраоперационного формирования изображений методом MR является визуализация и локализация инструментов или хирургических устройств. Это может быть сделано либо с использованием активных методов, например, посредством RF микрокатушек, присоединенных к наконечнику инструмента, либо пассивными методами локализации, которые основываются на артефактах изображения, индуцированных локальной магнитной восприимчивостью.
Активный метод локализации обеспечивает возможность непосредственного определения координат инструмента и поэтому позволяет осуществлять надежное отслеживание инструментов. Он также обеспечивает функциональные возможности, такие как, например, отслеживание части изображения. Недостаток активной локализации состоит в том, что она имеет следствием проблему безопасности из-за присутствия электрически проводящих кабелей, которые могут действовать как RF антенны и которые могут привести к опасному нагреванию ткани.
WO 2005/103748 Al раскрывает способ устранения опасностей, связанных с индукцией токов в электрически проводящих кабелях, которые используются как линии передачи для соединения вспомогательных средств, таких как используемые при вмешательстве инструменты или поверхностные RF катушки, с MR системой. Согласно обычному подходу, катушки индуктивности введены в соединяющий кабель. Эти катушки индуктивности связаны таким образом, что они формируют трансформатор. Дополнительно, схема настройки и согласования встроена в кабель, напоминая настроенный фильтр блокирования. Эта конфигурация подавляет индуцированные токи, которые привели бы к опасному нагреванию кабеля.
Недостаток, связанный с известными, основанными на трансформаторе линиями передачи, встроенными, например, в катетеры или направляющие провода, состоит в том, что это связано со значительными усилиями в отношении аппаратных средств, чтобы создать такие устройства.
Альтернативный подход предложен Celik и др. ("A Novel Catheter Tracking Method Using Reversed Polarization", Proc. Intl. Soc. Mag. Reson. Med., vol. 14, 2006, p. 264). Обратная круговая поляризация используется, чтобы получить MR изображение RF катушки, которая присоединена как резонансный маркер к используемому для вмешательства инструменту. Стандартные квадратурные катушки типа «птичьей клетки», которые используются как RF антенны в обычных MR системах, предназначены для приема только RF полей прямой круговой поляризации, потому что протоны в исследуемом теле также имеют прямую поляризацию. Это обусловлено положительным гиромагнитным отношением водородных ядер. Поэтому стандартная катушка типа птичьей клетки, модифицированная для приема только RF сигналов обратной круговой поляризации, вообще не принимала бы никакого MR сигнала от тела. Однако RF катушка, присоединенная к используемому для вмешательства инструменту, принимает MR сигналы от исследуемого тела и излучает линейно поляризованное RF поле. Линейно поляризованное излучение можно рассматривать как суперпозицию RF поля прямой и обратной круговой поляризации. Поэтому, модифицированная квадратурная катушка типа птичьей клетки, которая предназначена для приема только обратно поляризованного RF излучения, принимает сигнал, который излучен от RF катушки, присоединенной к используемому для вмешательства инструменту, но никакой сигнал от окружающей ткани тела не принимается. Таким образом, генерируется свободное от фона изображение, показывающее только положение используемого для вмешательства инструмента.
Недостатком вышеописанного метода является то, что специально разработанная только приемная квадратурная катушка тела должна использоваться для приема RF сигналов обратной круговой поляризации, генерированных RF катушкой, присоединенной в качестве резонансного маркера к используемому для вмешательства инструменту. RF катушка возбуждается косвенно через ядерное намагничивание ткани тела во время процедуры формирования изображения и локализации. Следовательно, отношение сигнал-шум (SNR) сравнительно низко, что является дополнительным недостатком известного способа.
Еще одним вариантом выбора для обеспечения пути передачи сигнала или энергии между MR устройством и используемым для вмешательства устройством (или любым другим вспомогательным оборудованием), без создания помех MR процедуре формирования изображения, является использованием нерезонансной RF. Однако нерезонансная RF также имеет ряд недостатков. Нерезонансная RF не может быть легко преобразована в резонансную RF. Кроме того, требуются дополнительные средства передачи и приема RF, если нерезонансная RF находится вне ширины полосы обычного RF оборудования MR устройства. С другой стороны, если нерезонансная RF находится в пределах ширины полосы настроенной RF цепи MR устройства, то могут возникнуть нежелательные взаимные помехи с системой ядерного спина.
Сущность изобретения
Поэтому, очевидно, что имеется потребность в улучшенном устройстве и способе формирования изображений методом MR. Следовательно, целью изобретения является предоставить MR систему и MR способ, обеспечивающие безопасную, надежную и не создающую помех передачу сигналов и/или энергии на вспомогательные средства, расположенные в пределах объема исследования.
В соответствии с настоящим изобретением, раскрыта система для формирования методом MR изображений тела, помещенного в исследуемый объем. Система содержит средство для создания по существу однородного основного магнитного поля в исследуемом объеме, средство для генерации переключаемых градиентов магнитного поля, накладываемых на основное магнитное поле, средство передачи для излучения RF сигналов к телу, средство управления для управления генерацией градиентов магнитного поля и RF сигналов, средство для приема и осуществления выборок MR сигналов, средство реконструкции для формирования MR изображений из выборок сигналов и вспомогательное средство, имеющее RF антенну для приема RF сигналов, генерированных средством передачи. Согласно изобретению, MR система выполнена с возможностью генерации RF сигналов круговой поляризации посредством средства передачи, причем RF сигналы имеют выбираемое направление вращения.
MR система согласно изобретению использует RF сигналы с обратной круговой поляризацией для передачи сигналов или мощности через существующие аппаратные средства RF передачи MR устройства на вспомогательное оборудование, расположенное в пределах исследуемого объема. RF сигналы с обратной круговой поляризацией генерируют соответственно обратно поляризованное В1 поле в пределах исследуемого объема, который не вызывает возбуждения ядерного намагничивания. Это объясняется тем, что, как упомянуто выше, ядра, имеющие положительное гиромагнитное отношение, не подвергаются влиянию В1 поля с обратной поляризацией. Поэтому передача сигнала или энергии не создает помех фактической процедуре формирования изображений методом MR. В соответствии с изобретением, может быть выбрано направление вращения RF сигналов. Это означает, что направление поляризации может переключаться, как требуется, между прямым и обратным. В прямом режиме генерируются первые RF сигналы, имеющие прямую круговую поляризацию для возбуждения ядерного намагничивания в пределах исследуемого тела. MR формирование изображения выполняется в этом режиме, как обычно. В обратном режиме генерируются вторые RF сигналы, имеющие обратную круговую поляризацию, для индуцирования напряжения в RF антенне вспомогательных средств без возбуждения ядерного намагничивания и, таким образом, без создания помех генерации и получения MR сигнала.
В соответствии с предпочтительным вариантом осуществления изобретения, MR система выполнена с возможностью, например посредством соответствующего программирования средства управления и/или средства восстановления, получать сигнал локализации, генерируемый вспомогательными средствами как отклик на второй RF сигнал, и вычислять положение вспомогательных средств из сигнала локализации. Безопасный активный метод отслеживания устройства реализован этим вариантом осуществления изобретения. Вспомогательное оборудование, которое должно быть локализовано, которое может быть, например, катетером или направляющим проводом, или любым другим типом используемого при вмешательстве инструмента, снабжено RF антенной, формирующей резонансный маркер (включающий в себя, например, соленоидную катушку и конденсатор). Для активного отслеживания RF сигналы, имеющие обратную поляризацию, посылаются к исследуемому телу, в которое вводится устройство, которое должно быть локализовано. Эти RF сигналы возбуждают резонансный маркер, приводя к сильному локальному В1 полю, имеющему линейную поляризацию. Линейно поляризованное локальное В1 поле затем возбуждает ядерное намагничивание в ткани тела в непосредственной близости от резонансного маркера. Посредством последующего сбора данных MR сигналы принимаются только от непосредственного окружения маркера без любых фоновых сигналов от остальной части ткани тела. С целью отслеживания устройства проекции на x-, y- и z-направления могут быть просто получены и восстановлены. Альтернативно, может быть получено и восстановлено полное MR изображение, которое показывает интенсивность изображения только в положениях маркеров. Такое MR изображение может использоваться для вычисления цветного наложения изображения на обычным образом полученное MR изображение, чтобы визуализировать положения меток относительно анатомических особенностей исследуемого тела. Метод отслеживания устройства согласно изобретению имеет преимущество, заключающееся в том, что оно может использоваться с любой RF катушкой для приема, включая решетки поверхностных катушек. В отличие от вышеописанного известного метода, он не основывается на дополнительной специализированной RF катушке тела для приема MR сигнала. Дополнительное преимущество состоит в том, что способ согласно изобретению обеспечивает улучшенное SNR. Это объясняется тем, что интенсивность и длительность RF сигналов с обратной поляризацией может быть выбрана так, чтобы привести к максимальному возбуждению намагничивания вблизи резонансных маркеров.
В соответствии с другим вариантом осуществления изобретения, вспомогательное средство является MR поверхностной катушкой. Способ согласно изобретению может использоваться для питания и/или управления беспроводной поверхностной катушкой, не создавая помех процедуре MR формирования изображения. Энергия и управляющие сигналы могут быть беспроводным способом переданы от катушки тела MR устройства к решетке поверхностных катушек, причем решетка поверхностных катушек используется как передающая катушка во время фактической процедуры MR формирования изображения. Каждый элемент решетки поверхностных катушек может быть снабжен управляемым внешним образом Q-переключателем, чтобы управлять интенсивностью RF сигналов, испускаемых соответствующим элементом. Поскольку управляющий сигнал для управления Q-переключателем имеет лишь низкую мощность, он может быть реализован, например, обычными нерезонансными беспроводными методами. Альтернативно, управляющий сигнал может быть передан, используя обратно поляризованные RF сигналы, генерируемые способом с временным чередованием с фактическим (прямополяризованным) RF возбуждением.
Реализация изобретения в обычных MR сканерах потребовала бы определенной модификации аппаратных средств RF передачи. Обычные квадратурные катушки тела возбуждаются через так называемый квадратурный гибрид, разделяющий RF ток, вырабатываемый усилителем мощности, на две части равной мощности и добавляющий сдвиг фазы на 90° в одну из частей. Эти две части подаются в катушку в двух отдельных точках. Выбранное направление вращения RF излучения круговой поляризации, испускаемого катушкой тела, может быть реализовано простой заменой двух частей RF тока. С этой целью обычный аппаратно-реализованный квадратурный гибрид может быть заменен переключаемым дополнением.
Согласно предпочтительному варианту осуществления изобретения, средство передачи MR системы содержит множество RF катушек, формирующих решетку из множества катушек, причем каждая RF катушка возбуждается отдельным RF усилителем и/или отдельным генератором RF сигнала. В последнее время MR системы с многоэлементными решетками RF катушек были введены для улучшения MR формирования изображения. При этом многоэлементная решетка RF катушек основана на настройке одиночных RF катушек. Например, однородность В1 поля может управляться в течение последовательности формирования изображения, чтобы компенсировать изменяющиеся влияния на распределение поля, которые обусловлены различными диэлектрическими свойствами исследуемого тела. Чтобы достичь выбираемого В1 распределения в пределах исследуемого объема, одиночные элементы катушек возбуждаются через отдельные передающие каналы, посредством чего могут быть индивидуально установлены фазы и амплитуды излучаемых RF сигналов. Использование такой решетки множества катушек для реализации настоящего изобретения является очевидным. Генерация поляризованных RF сигналов обратной поляризации может быть просто осуществлена с помощью программного обеспечения MR устройства с использованием соответствующих форм волны, возбуждающих отдельные RF катушки. Такая система может переключаться без какой-либо задержки между прямой и обратной поляризацией, и даже возможна одновременная передача обеих поляризаций.
Изобретение относится не только к MR устройству, но также и к способу для MR формирования изображения, по меньшей мере, части тела, помещенного в исследуемый объем MR системы. Способ содержит следующие этапы:
возбуждение ядерного намагничивания в пределах тела путем генерации последовательности первых RF сигналов и переключаемых градиентов магнитного поля, причем первые RF сигналы имеют прямую круговую поляризацию,
генерацию, по меньшей мере, одного второго RF сигнала, имеющего обратную круговую поляризацию для индуцирования напряжения в RF антенне вспомогательного оборудования MR системы без возбуждения ядерного намагничивания в пределах тела,
получение MR сигналов от тела и
восстановление MR изображения из полученных MR сигналов.
Компьютерная программа, приспособленная для выполнения процедуры формирования изображения согласно изобретению, может быть предпочтительным образом реализована на любых обычных компьютерных аппаратных средствах, которые находятся в настоящее время в клиническом использовании, для управления сканерами магнитного резонанса. Компьютерная программа может быть обеспечена на подходящих носителях информации, таких как CD-ROM или дискета. Альтернативно, она также может быть загружена пользователем с Интернет-сервера.
Краткое описание чертежей
Прилагаемые чертежи раскрывают предпочтительные варианты осуществления настоящего изобретения. Однако понятно, что чертежи предназначены только для иллюстрации, а не для определения объема изобретения. На чертежах:
Фиг.1 показывает MR сканер согласно изобретению;
Фиг.2 показывает используемый для вмешательства инструмент, который должен быть локализован в соответствии с изобретением.
Детальное описание примерных вариантов осуществления
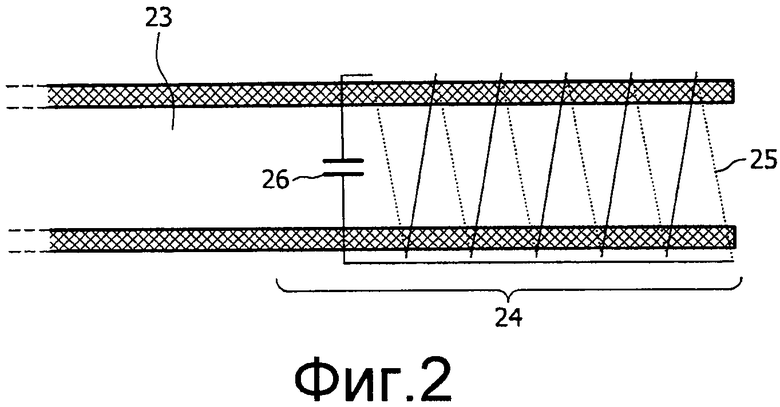
На фиг.1 система 1 формирования изображения магнитного резонанса в соответствии с настоящим изобретением показана как блок-схема. Устройство 1 содержит набор основных магнитных катушек 2 для генерации стационарного и однородного основного магнитного поля и три набора градиентных катушек 3, 4 и 5 для суперпозиции дополнительных магнитных полей с управляемой напряженностью и имеющих градиент в выбранном направлении. Традиционно, направление основного магнитного поля обозначено как z-направление, и два направления, перпендикулярные ему, как x- и y-направления. Градиентные катушки 3, 4, 5 возбуждаются посредством источника 6 питания. Устройство 1 дополнительно содержит RF решетку множества катушек для генерации В1 полей в исследуемом объеме 7. RF решетка множества катушек содержит шесть независимых катушек 8, 9, 10, 11, 12, 13, которые размещены смежно друг с другом на цилиндрической поверхности вокруг исследуемого объема 7. Катушки 8, 9, 10, 11, 12, 13 используются для излучения радиочастотного (RF) сигнала к телу 14. Каждая из шести катушек 8, 9, 10, 11, 12, 13 соединена с RF модулем 15 переключения. Через модуль 15 переключения соответствующие катушки 8, 9, 10, 11, 12, 13 соединены или с модулем 16 передачи, или с модулем 17 приема сигналов, то есть в зависимости от режима работы устройства (или режима передачи, или режима приема). Для каждой RF катушки 8, 9, 10, 11, 12, 13 MR система 1 содержит отдельный RF усилитель 18 и генератор 19 сигнала. Модуль 17 приема содержит чувствительные предусилители, демодулятор и цифровой блок осуществления выборок. Модуль 16 передачи и источник 6 питания для градиентных катушек 3, 4 и 5 управляются системой 20 управления, чтобы генерировать фактическую последовательность формирования изображения в соответствии с вышеописанным изобретением. Система управления обычно представляет собой микрокомпьютер с памятью и программным управлением. Для практической реализации изобретения он содержит программирование с описанием процедуры формирования изображения, при которой генерируются В1 поля с прямой и обратной поляризацией, как требуется, посредством соответствующего управления генераторами 19 сигналов и усилителями 18. Модуль 17 приема сигналов связан с блоком 21 обработки данных, например компьютером, для преобразования принятых MR сигналов в изображение. Это изображение может быть сделано видимым, например, на визуальном дисплейном блоке 22. В изображенном варианте осуществления катетер 23 введен в тело 14. Катетер 23 снабжен антенной RF (не изображена на Фиг.1) для приема обратно поляризованных RF сигналов, генерированных через катушки 8, 9, 10, 11, 12, 13.
Фиг.2 показывает наконечник 23 катетера более подробно. RF антенна 24 служит резонансным маркером для локализации наконечника катетера. Антенна 24 содержит соленоидную катушку 25, которая намотана вокруг катетера 23, и конденсатор 26. Катушка 25 и конденсатор 26 формируют резонансную схему, которая настроена на ларморовскую частоту. Для отслеживания наконечника катетера RF сигналы, имеющие обратную поляризацию, посылаются через RF катушки 8, 9, 10, 11, 12, 13 MR устройства (см. фиг.1) к исследуемому телу 14, в которое введен катетер 23. Эти RF сигналы возбуждают резонансный маркер 24, приводя, в результате, к сильному локальному В1 полю, имеющему линейную поляризацию. Линейно поляризованное локальное В1 поле затем возбуждает ядерное намагничивание в пределах ткани тела 14 в непосредственной близости от наконечника катетера. В качестве следующего этапа MR сигналы получают обычным способом, причем MR сигналы принимаются только из ткани, окружающей наконечник катетера, без любых фоновых сигналов из остальной части ткани тела. Проекции на x-, y- и z-направления получают и восстанавливают. Наконец, положение наконечника катетера получают из восстановленных проекций и индуцируют на дисплейном блоке 22 MR устройства (см. фиг.1).
Изобретение относится к магнитно-резонансной томографии. Система для MR формирования изображения тела (14), помещенного в исследуемый объем (7), причем система содержит средство (2) для создания по существу однородного основного магнитного поля в исследуемом объеме, средство (3, 4, 5) для генерации переключаемых градиентов магнитного поля, накладываемых на основное магнитное поле, средство передачи для излучения RF сигналов в направлении тела (14), средство (20) управления для управления генерацией градиентов магнитного поля и RF сигналов, средство (17) для приема и осуществления выборок MR сигналов, средство (21) реконструкции для формирования MR изображений из выборок сигнала и вспомогательное средство (23), имеющее RF антенну (24) для приема RF сигналов, генерируемых средством передачи, при этом система (1) выполнена с возможностью генерации RF сигналов круговой поляризации посредством средства передачи, причем направление поляризации может переключаться по требованию между прямым и обратным. Технический результат заключается в повышении безопасности и надежности, а также в уменьшении помех. 3 н. и 7 з.п. ф-лы, 2 ил.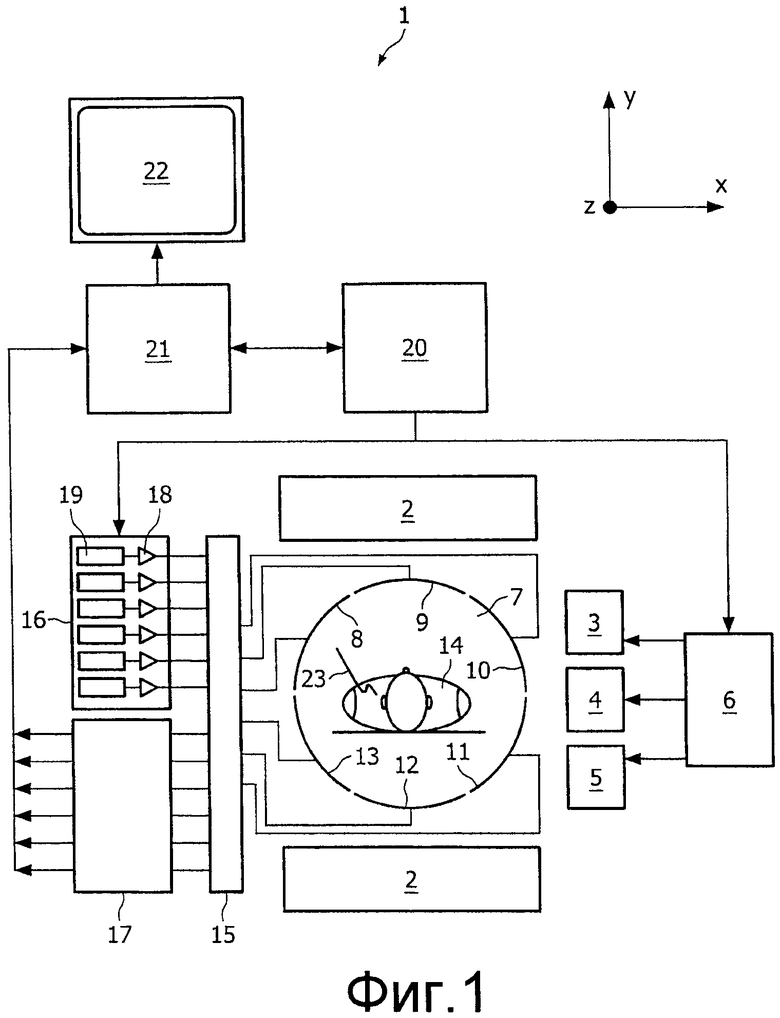
1. Система для MR формирования изображения тела (14), помещенного в исследуемый объем (7), причем система содержит средство (2) для создания, по существу, однородного основного магнитного поля в исследуемом объеме, средство (3, 4, 5) для генерации переключаемых градиентов магнитного поля, накладываемых на основное магнитное поле, средство передачи для излучения RF сигналов в направлении тела (14), средство (20) управления для управления генерацией градиентов магнитного поля и RF сигналов, средство (17) для приема и осуществления выборок MR сигналов, средство (21) реконструкции для формирования MR изображений из выборок сигнала и вспомогательное средство (23), имеющее RF антенну (24) для приема RF сигналов, генерируемых средством передачи, при этом система (1) выполнена с возможностью генерации RF сигналов круговой поляризации посредством средства передачи, причем направление поляризации может переключаться по требованию между прямым и обратным.
2. Система по п.1, причем система (1) дополнительно выполнена с возможностью генерации последовательности первых RF сигналов, имеющих прямую круговую поляризацию для возбуждения ядерного намагничивания в пределах тела (14).
3. Система по п.1 или 2, причем система (1) дополнительно выполнена с возможностью генерации, по меньшей мере, одного второго RF сигнала, имеющего обратную круговую поляризацию для индуцирования напряжения в RF антенне вспомогательного средства (23) без возбуждения ядерного намагничивания в пределах тела (14).
4. Система по п.3, причем система выполнена с возможностью обнаружения сигнала локализации, генерируемого вспомогательным средством (23) как отклик на второй RF сигнал, и вычисления положения вспомогательного средства (23) из сигнала локализации.
5. Система по п.4, в которой вспомогательное средство (23) является используемым при вмешательстве инструментом, содержащим соленоидную катушку (25) и конденсатор (26) в качестве резонансной RF антенны (24).
6. Система по п.3, в которой вспомогательное средство является MR поверхностной катушкой.
7. Система по п.1, в которой средство передачи содержит множество RF катушек (8, 9, 10, 11, 12, 13), формирующих решетку множества катушек, причем каждая RF катушка (8, 9, 10, 11, 12, 13) возбуждается отдельным RF усилителем (18) и/или отдельным генератором (19) RF сигнала.
8. Способ MR формирования изображения, по меньшей мере, части тела (14), помещенного в исследуемый объем (7) MR системы (1), причем способ содержит следующие этапы: возбуждение ядерного намагничивания в пределах тела (14) путем генерации последовательности первых RF сигналов и переключаемых градиентов магнитного поля, причем первые RF сигналы имеют прямую круговую поляризацию, генерацию, по меньшей мере, одного второго RF сигнала, имеющего круговую поляризацию, направление которой может переключаться по требованию между прямым и обратным, для индуцирования напряжения в RF антенне (24) вспомогательного оборудования (23) MR системы (1) без возбуждения ядерного намагничивания в пределах тела (14), получение MR сигналов от тела (14) и восстановление MR изображения из полученных MR сигналов.
9. Способ по п.8, дополнительно содержащий этапы обнаружения сигнала локализации, генерируемого вспомогательным оборудованием (23) как отклик на второй RF сигнал, и вычисления положения вспомогательного оборудования (23) в пределах исследуемого объема (7) из сигнала локализации.
10. Машиночитаемый носитель, содержащий сохраненную на нем компьютерную программу для управления MR системой (1), причем компьютерная программа содержит инструкции для генерации первого RF сигнала круговой поляризации, направление поляризации которого может переключаться по требованию между прямым и обратным для возбуждения ядерного намагничивания, генерации второго RF сигнала, имеющего обратную круговую поляризацию для индуцирования напряжения в RF антенне (24) вспомогательного оборудования (23) MR системы без возбуждения ядерного намагничивания.
| US 5473252 А, 05.12.1995 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6608480 B1, 19.08.2003 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

