ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу и к системе цифрового усилителя для работы системы с градиентным магнитом для MRI (магнитно-резонансной визуализации) для генерации градиентных магнитных полей, в частности для пространственного кодирования сигналов релаксации MR (магнитного резонанса).
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В системе MRI или MR сканере исследуемый объект, обычно пациент, подвергают воздействию равномерного основного магнитного поля (поля B0) для того, чтобы магнитные моменты ядер внутри исследуемого объекта стремились вращаться вокруг оси приложенного поля B0 (прецессия Лармора) с определенной результирующей намагниченностью всех ядер, параллельной полю B0. Скорость прецессии называют ларморовой частотой, которая зависит от конкретных физических характеристик вовлеченных ядер, а именно их гиромагнитного отношения, и напряженности приложенного поля B0. Гиромагнитное отношение представляет собой отношение между магнитным моментом и спином ядра.
Передавая радиочастотный (RF) возбуждающий импульс (поле B1), который является ортогональным к полю B0, которое генерирует RF передающая антенна, и при совпадении ларморовой частоты ядер, представляющих интерес, происходит возбуждение спинов ядер и согласование по фазе, а отклонение их результирующей намагниченности от направления поля B0 получают для того, чтобы генерировать поперечный компонент в зависимости от продольного компонента результирующей намагниченности.
После завершения RF возбуждающего импульса начинаются процессы релаксации продольных и поперечных компонентов результирующей намагниченности, пока результирующая намагниченность не вернется к своему равновесному состоянию. MR сигналы релаксации, испускание которых происходит посредством процесса поперечной релаксации, обнаруживают посредством MR/RF принимающей антенны.
Осуществляют преобразование Фурье принимаемых MR сигналов релаксации, которые представляют собой амплитудные сигналы во времени, в сигналы MR спектра, основанные на частоте, и обработку для генерации MR изображения ядер, представляющих интерес, внутри исследуемого объекта. Для того, чтобы добиться пространственного выбора среза или объема внутри исследуемого объекта и пространственного кодирования принимаемых MR сигналов релаксации, исходящих из среза или объема, представляющего интерес, на поле B0 накладывают градиентные магнитные поля, которые имеют то же направление, что и поле B0, но имеют градиенты в ортогональных направлениях x, y и z. В связи с тем фактом, что ларморова частота зависит от напряженности магнитного поля, которое накладывают на ядра, ларморова частота ядер соответственно снижается сонаправленно с убывающим градиентом (и наоборот) общего поля B0, полученного в результате суперпозиции, так что посредством соответствующей регулировки частоты передаваемого RF возбуждающего импульса (и посредством соответствующей регулировки резонансной частоты MR/RF принимающей антенны) и посредством соответствующего управления градиентными магнитными полями можно добиваться выбора ядер внутри среза в определенном местоположении вдоль каждого градиента в направлении x, y и z и, посредством этого, в целом, внутри определенного вокселя объекта.
Для генерации градиентных магнитных полей предоставлена система с градиентным магнитом, которая содержит множество градиентных магнитов в форме катушек (градиентных катушек), которая типично работает с помощью системы градиентного усилителя для генерации электрического тока для питания градиентных катушек. Обычно такие токи градиентных катушек имеют определенную форму волны, которую система градиентного усилителя должна создавать очень точно. Форма волны представляет собой, например, трапециевидный импульс с длительностью импульса, например, приблизительно 40 мс, временем подъема и спада импульсов, например, приблизительно 0,2 мс каждое и амплитудой порядка от нескольких сотен и вплоть до приблизительно 1000 A. Эти токовые импульсы следует точно контролировать с отклонением только несколько мА или менее для того, чтобы обеспечить генерацию MRI изображений с высоким качеством и высокими пространственным разрешением и точностью.
В WO 2010/004492 раскрыт цифровой усилитель с управлением с прямой и обратной связью для генерации и управления электрической выходной мощностью для работы такой системы с градиентным магнитом. В основном, такой цифровой усилитель содержит вход для приема цифрового входного сигнала, представляющего желаемую форму токовой кривой аналогового выходного сигнала усилителя, посредством этого аналогового выходного сигнала приводят в действие систему с градиентным магнитом. Усилитель содержит контроллер с прямой и обратной связью для того, чтобы определять и компенсировать сигнал ошибки между входным сигналом и выходным сигналом. Контроллер с прямой связью считывает входной сигнал и прогнозирует выходной сигнал как можно точнее, основываясь на модели системы. Затем прогнозируемый выходной сигнал вычитают в области аналоговых данных из измеряемого аналогового выходного сигнала, и получаемый аналоговый силовой дифференциальный ток превращают в область цифровых данных для предоставления сигнала обратной связи, который затем комбинируют с сигналом прямой связи. В результате, получают цифровое представление определяемого выходного сигнала, которое затем вычитают из желаемого цифрового входного сигнала с тем, чтобы сигнал ошибки, который подают в цифровой контроллер для предоставления подходящего управляющего сигнала в модулятор, приводил к противоположности сигнала ошибки. Модулятор преобразует управляющий сигнал в ШИМ-сигнал, который подают на преобразователь мощности, который генерирует аналоговый выходной сигнал для того, чтобы возбуждать систему с градиентным магнитом.
Схема цифрового управления для ШИМ преобразования энергии раскрыта в докладе на конференции «Advanced digital control scheme of two-paralleled bridge type current tracking power conversion amplifier for magnetic-resonance imaging» авторов S. Watanabe и M. Nakaoka 26 мая 1997 года.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В связи с указанными выше требованиями к точности токовых импульсов для работы системы с градиентным магнитом известной системой градиентного усилителя управляют более или менее аналогично, поскольку цифровое управление неотъемлемо страдает от шума цифровой дискретизации и определенных эффектов оцифровывания. В частности, показано, что ограниченное разрешение аналогово-цифровых преобразователей и ШИМ модуляторов, а также ограниченная скорость обработки цифровых контроллеров могут служить причиной серьезных отклонений и проблем с воспроизводимостью, когда генерируют желаемый ток градиентного магнита.
В целом, одна задача, лежащая в основе изобретения, состоит в том, чтобы предоставить способ и систему цифрового усилителя для работы системы MRI с градиентным магнитом на основе полностью цифрового управления, не вызывая указанных выше или других проблем, но вместе с тем соответствовать требованиям к точности, как указано выше, значительно более полно, чем при использовании известных решений.
Другая задача, лежащая в основе изобретения, состоит в том, чтобы предоставить способ и систему цифрового усилителя для работы системы MRI с градиентным магнитом с высокой точностью и при сравнительно низкой стоимости и на основе сравнительно дешевых и стандартных серийных существующих маломощных компонентов.
По меньшей мере одна из этих задач решается посредством способа по п. 1 и системы цифрового усилителя по п. 2.
Принцип управления, как предоставлено посредством изобретения, имеет очень высокое подавление помех с тем, чтобы происходило максимальное подавление указанных выше эффектов оцифровывания и, следовательно, стандартные цифровые компоненты, такие как серийные, существующие аналогово-цифровые преобразователи, можно использовать для реализации цифрового контроллера.
Кроме того, изобретение позволяет реализовать способ и систему цифрового усилителя для работы системы MRI с градиентным магнитом на основе принципов высокоточного управления и связанных с ними таких алгоритмов проектирования, что указанные выше требования также можно выполнять для полностью цифрового управления.
Другое преимущество решения в соответствии с изобретением состоит в том, что для предложенного способа управления пространством состояний не требуется управления с прямой связью для того, чтобы увеличивать ширину полосы. Следовательно, принцип контроллера пространства состояний в соответствии с изобретением более устойчив к варьированию системных параметров и имеет более высокое подавление помех, чем принцип стандартного контроллера, такого как ПИД контроллер.
Все это делает возможным использование полностью цифрового контроллера и посредством этого системы полностью цифрового усилителя для работы системы MRI с градиентным магнитом с использованием экономически эффективных стандартных цифровых компонентов. Кроме того, указанное выше ведет к улучшенной воспроизводимости выходного тока, что ведет к более высокому качеству изображения в системе MRI.
Зависимые пункты формулы изобретения раскрывают преимущественные варианты осуществления изобретения.
Следует принимать во внимание, что признаки изобретения допускают объединение в какую-либо комбинацию, не отступая от объема изобретения, как определено посредством сопровождающей формулы изобретения.
Дополнительные подробности, признаки и преимущества изобретения видны из следующего описания предпочтительных и образцовых вариантов осуществления изобретения, которое дано со ссылкой на фигуры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 представлены основные компоненты MR системы визуализации или сканера;
на фиг. 2 представлен схематический вид системы MRI с градиентным магнитом;
на фиг. 3 представлена общая топология системы усилителя для работы градиентной катушки системы MRI с градиентным магнитом;
на фиг. 4 представлена схематическая архитектура одного из вариантов осуществления системы градиентного усилителя с цифровым управлением в соответствии с изобретением;
на фиг. 5 представлена схематическая функциональная структура одного из вариантов осуществления цифрового контроллера для системы градиентного усилителя в соответствии с изобретением;
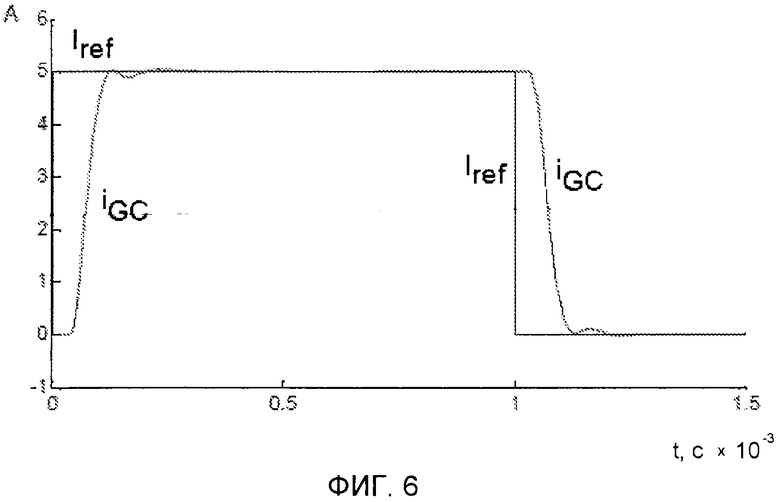
на фиг. 6 представлен выходной сигнал контроллера согласно фиг. 5 в ответ на первый входной сигнал;
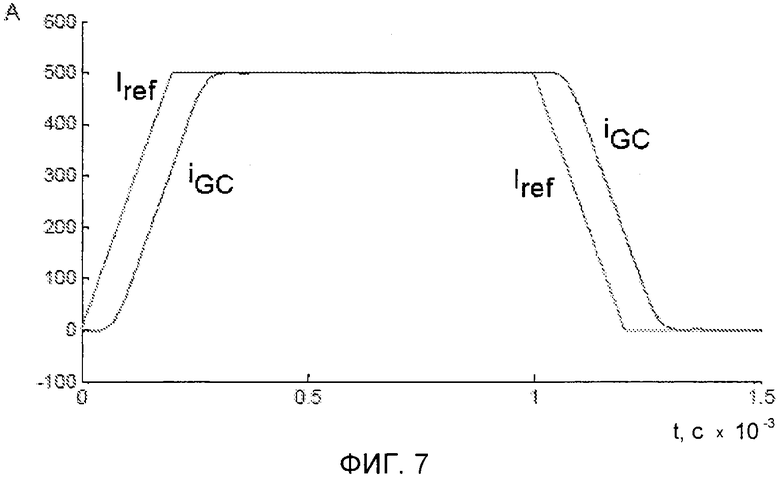
на фиг. 7 представлен выходной сигнал контроллера согласно фиг. 5 в ответ на второй входной сигнал;
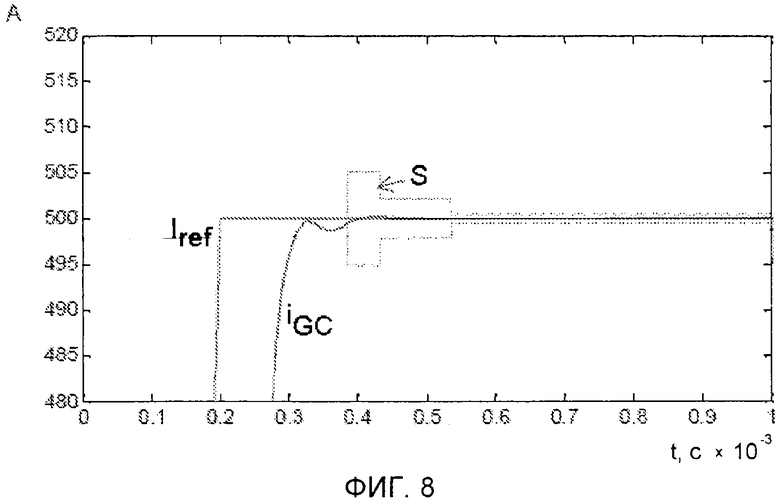
на фиг. 8 представлен увеличенный срез форм тока согласно фиг. 6; и
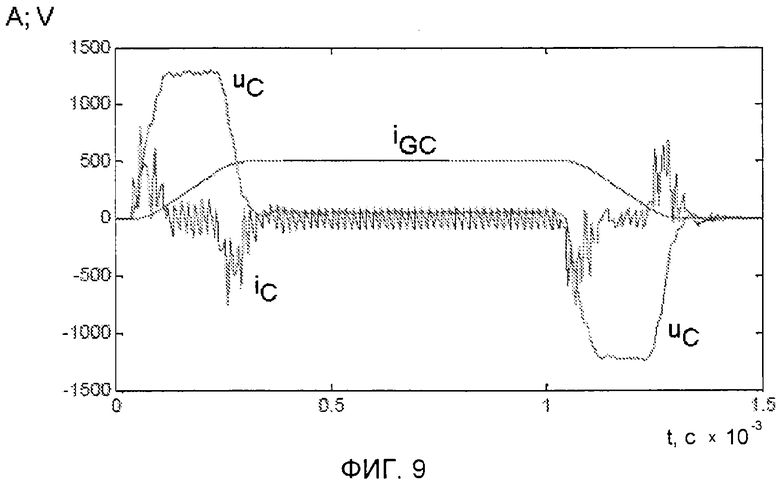
на фиг. 9 представлены переходные отклики всех системных состояний для структуры контроллера согласно фиг. 5.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
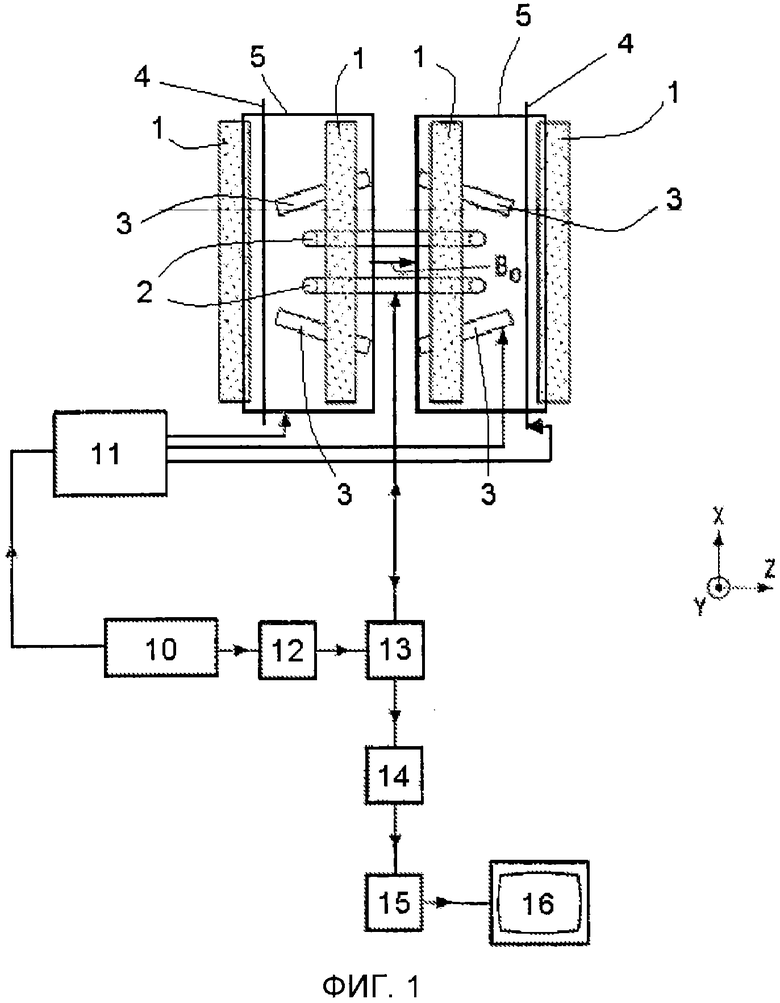
На фиг. 1 представлены существенные компоненты системы магнитно-резонансной визуализации или магнитно-резонансного сканера, включая исследуемый объем, в который помещают объект, подлежащий визуализации. Система содержит систему 1 основного магнита для генерации по существу равномерного и постоянного основного магнитного поля B0 в направлении z для выравнивания ядерных спинов в объекте, подлежащем визуализации. Компоновка 2 RF/MR передающей/принимающей антенны предоставлена для передачи RF сигналов для генерации RF магнитного переменного поля B1 для возбуждения ядерного магнитного резонанса и для приема последующих MR сигналов релаксации от связанных ядер объекта, подлежащего визуализации. Для пространственного выбора и пространственного кодирования принимаемых MR сигналов релаксации, исходящих от возбужденных ядер, система также содержит систему с градиентным магнитом с использованием множества катушек 3, 4, 5 градиентного магнитного поля, с помощью которых генерируют градиентные магнитные поля в ортогональных направлениях x, y и z соответственно, как изложено выше.
Дополнительно, система магнитно-резонансной визуализации или магнитно-резонансный сканер содержит блок 10 управления, который во время RF передачи управляет блоком 12 RF передатчика для генерации RF сигналов, которые подают через RF передающую/принимающую схему 13 на компоновку 2 RF антенны. Принимаемые MR сигналы релаксации подают через RF передающую/принимающую схему 13 на блок 14 усилителя и демодулятора и обрабатывают посредством блока 15 обработки для генерации MR изображения исследуемого объекта на блоке 16 отображения. Кроме того, во время приема MR сигнала блок 10 управления генерирует управляющие сигналы для системы 11 усилителя для генерации электрической выходной мощности, в частности, в форме выходных токов для работы каждой из катушек градиентного магнитного поля 3, 4, 5 для того, чтобы выбирать желаемый срез или объем внутри исследуемого объекта, подлежащего визуализации на блоке 16 отображения, как известно в целом.
Указанные выше и следующие принципы и обстоятельства применимы как в случае осевой (горизонтальной) системы MRI, в которой пациента или другой исследуемый объект направляют в осевом направлении через цилиндрическое или трубчатое исследуемое пространство, так и в случае вертикальной (открытой) системы, имеющей исследуемое пространство между верхним и нижним концом структуры рамы C-типа.
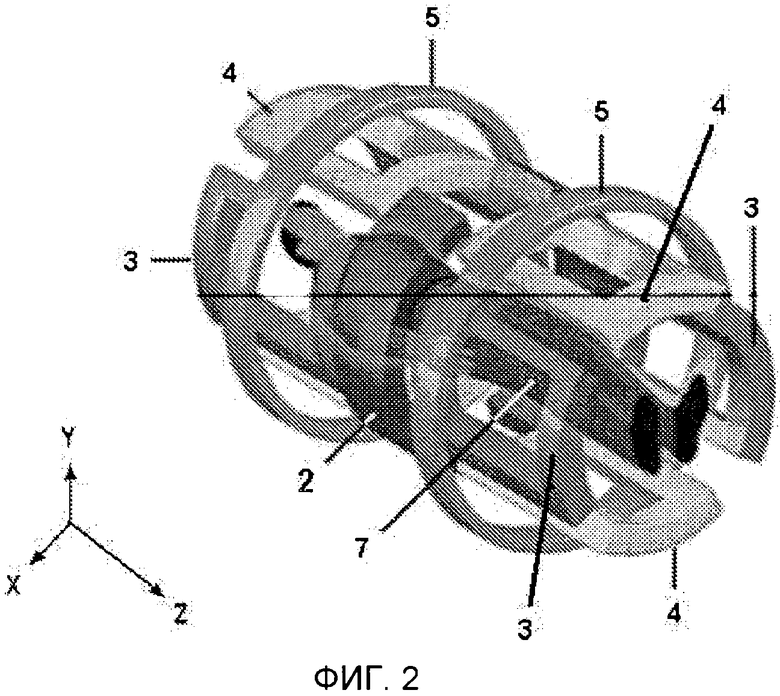
На фиг. 2 представлен более подробно схематический вид компоновки катушек 3, 4, 5 градиентного магнитного поля системы MRI с градиентным магнитом для системы магнитно-резонансной визуализации или магнитно-резонансного сканера.
Для генерации зависящего от положения или градиентного магнитного поля в направлении x предоставлены первые катушки 3 градиентного магнитного поля, по одной вдоль обеих сторон исследуемого объекта 7. Для генерации зависящего от положения или градиентного магнитного поля в направлении y предоставлены вторые катушки 4 градиентного магнитного поля, по одной над и под исследуемым объектом 7. Наконец, предоставлены третьи катушки 5 градиентного магнитного поля, которые окружают исследуемый объект и смещаются в направлении z для генерации зависящего от положения или градиентного магнитного поля в направлении z. Компоновка 2 RF/MR передающей/принимающей антенны также схематически указана на фиг. 2.
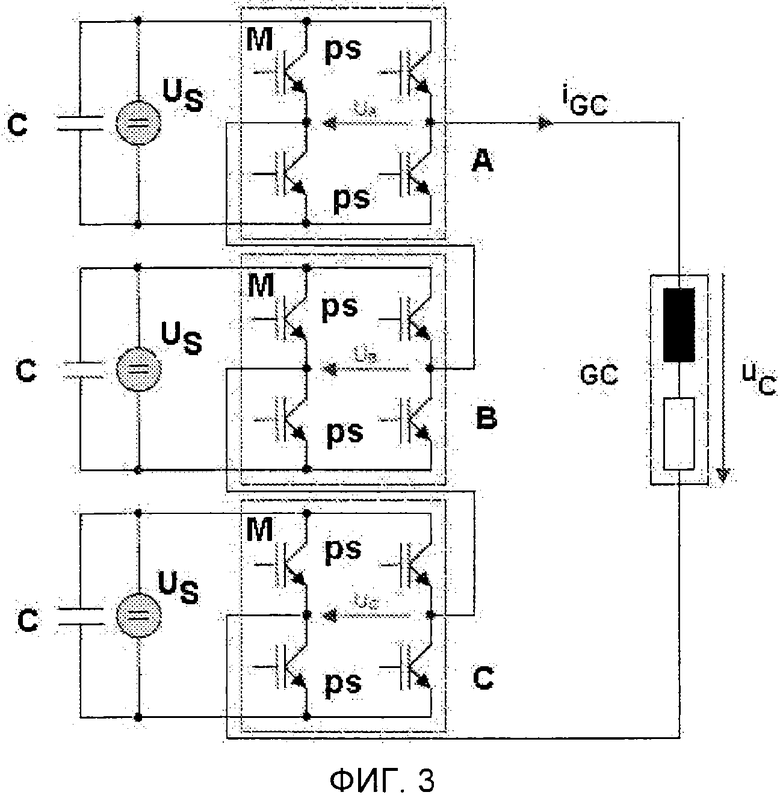
На фиг. 3 представлена образцовая общая топология основного каскада усилителя системы градиентного усилителя для работы каждой одной из градиентных катушек (GC) 3, 4, 5 с первой до третьей из системы MRI с градиентным магнитом посредством прохождения тока градиентной катушки iGC через нее (выходной фильтр градиентной катушки не показан на этой фиг.). Каскад усилителя содержит предпочтительно три (или более) полных моста, которые соединены последовательно, а именно первый, второй и третий инвертор A, B, C, для генерации первого выходного напряжения UA, второго выходного напряжения UB и третьего выходного напряжения UC соответственно. Каждый полный мост содержит четыре силовых переключателя ps, каждый из которых может быть предоставлен посредством нескольких, параллельно соединенных БТИЗ, предпочтение которым отдано в связи с экономическими причинами. Кроме того, предпочтительно использовать известные модули М с половинным или полным мостом с БТИЗ, содержащие от двух до четырех БТИЗ и даже электронику драйвера для управления затвором для того, чтобы дополнительно снижать стоимость.
Напряжение источника питания US (например, 600 В) каждого полного моста имеет плавающий потенциал. Альтернативно, можно использовать напряжение только одного источника питания, которое нагружает конденсаторы C всех полных мостов посредством использования подхода интеллектуального управления.
Каждый полный мост или инвертор A, B, C может генерировать три уровня выходного напряжения (+US, 0, -US) в зависимости от положения переключателя силовых переключателей ps. Таким образом, последовательное соединение трех полных мостов может доставлять семь различных уровней напряжения. За счет такой топологии получают два значительных преимущества. С одной стороны, высокое выходное напряжение можно генерировать посредством силовых переключателей ps низкого напряжения с тем, чтобы можно было снизить издержки, обусловленные силовыми переключателями ps. С другой стороны, в связи с высоким числом дискретных уровней напряжения по сравнению с усилителем с одним полным мостом колебания тока будут меньше, уменьшая требования на выходном фильтре градиентной катушки и повышая воспроизводимость тока.
Для того, чтобы выполнить изложенные выше требования системы усилителя для работы системы с градиентным магнитом, было выявлено, что необходимо управление по замкнутому контуру для основных каскадов усилителя и выходного тока системы усилителя для градиентных катушек и что, в частности, предпочтительно полное цифровое управление. На фиг. 4 представлена схематическая архитектура варианта осуществления такой системы градиентного усилителя с цифровым управлением в соответствии с изобретением для каждой одной из градиентных катушек (GC) 3, 4, 5 с первой до третьей.
Она содержит каскад усилителя, например три (или более) инвертора A, B, C, как показано на фиг. 3, которые отражены на фиг. 4 в упрощенном представлении в форме блока Inv инвертора. На выходе блока Inv инвертора схематически показан выходной фильтр F градиентной катушки, который имеет две последовательные катушки индуктивности Lf и один параллельный конденсатор Cf. Сама градиентная катушка GC (одна из с первой до третьей) показана в форме ее эквивалентной схемы, а именно последовательного соединения катушки индуктивности L и омического сопротивления R. Кроме того, система градиентного усилителя содержит первый датчик тока для восприятия выходного тока ic блока Inv инвертора, второй датчик тока для восприятия тока градиентной катушки iGC, который течет через градиентную катушку GC, и датчик напряжения для восприятия напряжения градиентной катушки uC на градиентной катушке GC.
Выходной ток iC блока Inv инвертора (ток инвертора), напряжение градиентной катушки uC и ток градиентной катушки iGC предоставляют на входы первого, второго и третьего оперативного усилителя OP1, OP2, OP3 с низким уровнем шумов соответственно, для их усиления в области аналоговых данных. Выходные клеммы оперативных усилителей OP1, OP2, OP3 соединены со входами аналогово-цифрового преобразователя A/D высокого разрешения, который также принимает опорный ток Iref от источника Ref опорного тока.
Оцифрованные выходные значения аналогово-цифрового преобразователя A/D предоставляют на вход цифрового контроллера Con, который работает на основе цифрового аппаратного обеспечения, такого как процессор цифровых сигналов (DSP) или вентильная матрица, программируемая пользователем (FPGA), полностью в области цифровых данных.
Выходные управляющие сигналы u контроллера Con предоставляют на вход ШИМ модулятора PWM для перевода выходных управляющих сигналов u контроллера Con в подходящие сигналы ss переключателя. Наконец, эти сигналы ss переключателя предоставляют на блок Inv инвертора, например, на фиг. 3, на силовые переключатели ps инверторов A, B, C, для переключения напряжения источника питания US посредством инверторов A, B, C с тем, чтобы генерировать ШИМ напряжение на выходе блока Inv инвертора так, чтобы желаемый ток градиентной катушки iGC, имеющий определенную форму волны и амплитуду, как изложено выше, пропускать через связанную градиентную катушку GC.
Преимущества такой цифровой системы управления и, в частности, полностью цифрового контроллера Con, заключаются в более высокой гибкости, более коротком времени разработки и, в частности, в том факте, что возможны усовершенствованные способы управления новой системной архитектурой. Последнее преимущество является особенно важным, поскольку его будут использовать для того, чтобы снижать стоимость всей системы градиентного усилителя, которая очень важна для таких новых систем. Снижение стоимости можно реализовать в связи с тем фактом, что можно использовать более дешевые компоненты электронного управления питанием, недостатки которых можно компенсировать более усовершенствованными алгоритмами цифрового управления.
Основные проблемы, с которыми сталкиваются, когда реализуют такую полностью цифровую систему управления, заключаются в переходе из области аналоговых данных в область цифровых данных и в переходе из области цифровых данных в область аналоговых данных. Основными причинами этих проблем является ограниченное разрешение по значению у аналогово-цифрового преобразователя A/D, ограниченная скорость обработки (разрешение по времени) цифрового контроллера Con и ограниченное разрешение по времени у ШИМ-модулятора PWM, которые совместно могут вести к тому, что желаемый ток градиентной катушки iGC не может быть воспроизведен с требуемой точностью, как изложено выше.
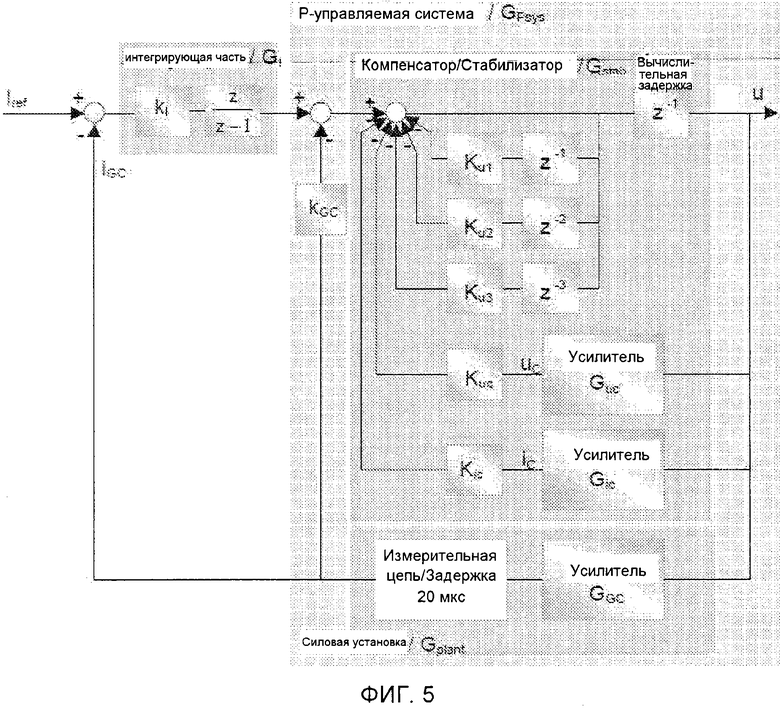
В целом, два различных принципа контроллера можно использовать для реализации такой системы управления в области цифровых данных, а именно ПИД контроллер и контроллер пространства состояний. Выявлено, что принцип контроллера пространства состояний имеет многие преимущества перед принципом ПИД контроллера в отношении снижения указанных выше ограниченных разрешений и надежности, в частности, в отношении изменения реакции на управление, если системные параметры отклоняются от своих номинальных значений. Управляющие структурные и функциональные блоки связанного ПИ контроллера пространства состояний схематически указаны на фиг. 5.
Главными компонентами являются интегрирующая часть G1 и П-управляемая система GPSYS. П-управляемая система GPSYS содержит компенсатор задержки/стабилизатор GSTAB и силовую установку GPLANT.
Компенсатор задержки/стабилизатор GSTAB содержит блоки z-1, z-2, z-3 задержки, которые отражают вычислительную задержку на один, два или три цикла синхронизации соответственно. Кроме того, компенсатор задержки/стабилизатор GSTAB содержит управляющие коэффициенты KU1, KU2, KU3 для вычислительной задержки на один, два или три цикла синхронизации соответственно выходного управляющего сигнала u контроллера Con и управляющие коэффициенты KUC и KIC для напряжения градиентной катушки uC и выходного тока iC (см. фиг. 4) блока Inv инвертора соответственно. Наконец, компенсатор задержки/стабилизатор GSTAB содержит передаточные функции GUC и GIC выходного фильтра F градиентной катушки (см. фиг. 4) для напряжения градиентной катушки uC и выходного тока iC блока Inv инвертора соответственно и управляющий коэффициент KGC для тока градиентной катушки iGC.
Силовая установка GPLANT содержит передаточную функцию GGC последовательно с цепью регулярной задержки с 20 мкс измеряемого значения тока градиентной катушки iGC аналогово-цифрового преобразователя A/D плюс дополнительная фильтрация.
Измеренные значения uC и iC характеризуются задержкой, которая равна вычислительной задержке. Таким образом, дополнительная цепь задержки для этих измеренных значений отсутствует.
В интегрирующей части GI интегрируют отклонение управления, которое представляет собой разность между опорным током Iref и током градиентной катушки iGC. Кроме того, ток градиентной катушки ioc, подаваемый через управляющий коэффициент KGC, вычитают из выходного сигнала интегрирующей части Gi. Результатом тока градиентной катушки iGC является выходной сигнал силовой установки GPLANT, в которую подают ввод выходного значения u контроллера Con, имеющего задержку на один цикл синхронизации z-1.
Цифровое выходное значение u контроллера Con, имеющее задержку на один цикл синхронизации z-1, также подают обратно через передаточную функцию GUC и управляющий коэффициент KUC и через передаточную функцию Gic и управляющий коэффициент Kic. Наконец, выходное значение u контроллера Con задерживают на один, два или три цикла синхронизации z-1, z-2, z-3, и каждое задержанное выходное значение u также подают обратно через связанные управляющие коэффициенты KU1, KU2, KU3 соответственно.
Параметры такого контроллера с обратной связью пространства состояний, показанного на фиг. 5, в частности, указанные выше управляющие коэффициенты и передаточные функции, можно разрабатывать с помощью известных способов, например способа размещения полюсов или других.
Предпочтительно полюса выбирают так, чтобы они были реальными, чтобы гарантировать, что отсутствует перерегулирование реакции на управление по замкнутому контуру. Полюса с абсолютными значениями, которые меньше единицы, будут гарантировать стабильность контроллера. Чем ближе полюса к нулю, тем быстрее будет реакция на управление. Например, полюса по 0,15 обычно будут приводить к достаточно большой ширине полосы контроллера, при этом также гарантируя максимальную устойчивость к отклонениям параметров контроллера от их номинальных значений.
На фиг. 6 представлено моделирование временного интервала для контроллера получаемого пространства состояний для ступенчатого входного опорного тока Iref с амплитудой 5 А. Реакция на управление является очень быстрой. Достижение 63% от конечного значения тока iGC усилителя градиентной катушки занимает приблизительно 40 мкс (начиная от первой реакции на управление). Имеет место небольшое перерегулирование/недорегулирование, которое является результатом аппроксимаций, выполняемых для разработки контроллера. Они представляют собой усреднение измеряемого значения, моделируемого с помощью чистой задержки и нецелочисленной задержки, моделируемой с помощью взвешенной суммы двух значений с целочисленной задержкой.
Однако это не критично, поскольку перерегулирование/недорегулирование является даже более низким, если подают практически значимый, линейно изменяющийся ток Iref в качестве входного сигнала на контроллер, как показано на фиг. 7, для линейно изменяющегося тока 500 A. Едва ли можно отметить не идеальную реакцию на управление (ток iGC усилителя градиентной катушки).
На фиг. 8 представлена увеличенная критическая область реакции на управление, представленной на фиг. 6. Она указывает на то, что максимальное отклонение управления во время перерегулирования/недорегулирования составляет только приблизительно 1,4 A (0,3%). Соответствующая установившаяся характеристика iGC полностью выполняет требование S градиентного усилителя к установлению.
Наконец, переходная характеристика всех системных состояний, включая ток градиентной катушки iGC и состояния uC и iC выходного фильтра F, изображены на фиг. 9 для линейно меняющегося тока в 500 A. В этих примерах напряжение uC на конденсаторе Cf (см. фиг. 4) эквивалентно ШИМ напряжению после фильтра низких частот. Максимальное напряжение uC составляет приблизительно ±1300 В и необходимо для того, чтобы изменить ток градиентной катушки iGC с 0 приблизительно до 500 А приблизительно за 0,2 мс. В связи с почти идеальным затуханием контроллера LC фильтра F на выходе блока Inv инвертора нельзя наблюдать колебания с резонансной частотой.
Несмотря на то, что изобретение проиллюстрировано и описано подробно на рисунках и в указанном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративное или образцовое, а не ограничивающее, и изобретение не ограничено раскрытыми вариантами осуществления. Вариации вариантов осуществления изобретения, описанные выше, например, по отношению к самим антенным элементам, их формам и числу и расположениям по отношению друг к другу, чтобы добиться объясненного выше результата в виде по меньшей мере по существу идентичных полей зрения для ядер, имеющих по существу различные гиромагнитные отношения, возможны для специалиста в данной области, не отступая от основного принципа изобретения, как определено с помощью сопровождающей формулы изобретения.
Вариации раскрытых вариантов осуществления могут понять и выполнить специалисты в данной области при практическом выполнении описываемого в заявке изобретения, изучив рисунки, раскрытие и приложенную формулу изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или стадии, а форма единственного числа не исключает множественного числа. Один блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой. Какие-либо ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема формулы изобретения.
Изобретение относится к контроллеру пространства состояний с обратной связью. Способ работы системы магнитно-резонансной визуализации (MRI) с градиентным магнитом для генерации градиентных магнитных полей посредством возбуждения токов градиентной катушки в градиентных катушках системы с градиентным магнитом, причем токами градиентной катушки управляют с помощью контроллера, который реализован в форме контроллера пространства состояний с обратной связью в области цифровых данных и который генерирует цифровое выходное значение, с помощью которого генерируют широтно-импульсно-модулированное напряжение для возбуждения токов градиентной катушки через градиентные катушки с предварительно определенной формой волны, причем интегрируют отклонение управления, которое генерируют в форме разности между током градиентной катушки и опорным током, генерируют цифровое выходное значение (u) по интегрированному отклонению управления и подают обратно и задерживают цифровое выходное значение (u) по меньшей мере на один, два и три цикла синхронизации и затем вычитают из цифрового выходного значения (u). Технический результат - повышение качества изображения в системе MRI. 2 н. и 2 з.п. ф-лы, 9 ил.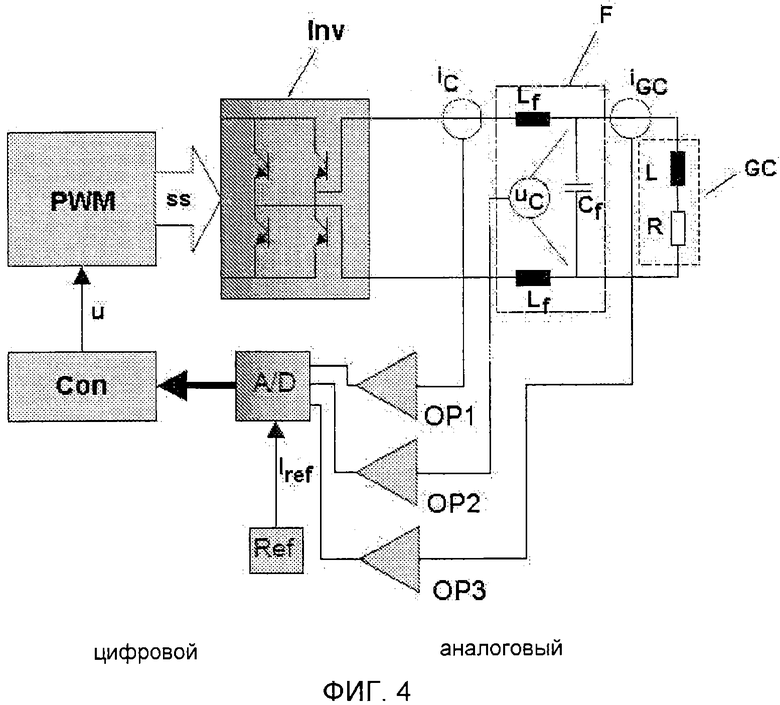
1. Способ работы системы магнитно-резонансной визуализации (MRI) с градиентным магнитом для генерации градиентных магнитных полей посредством возбуждения токов градиентной катушки в градиентных катушках системы с градиентным магнитом, причем токами градиентной катушки управляют с помощью контроллера, который реализован в форме контроллера пространства состояний с обратной связью в области цифровых данных и который генерирует цифровое выходное значение, с помощью которого генерируют широтно-импульсно-модулированное напряжение для возбуждения токов градиентной катушки через градиентные катушки с предварительно определенной формой волны, причем интегрируют отклонение управления, которое генерируют в форме разности между током градиентной катушки и опорным током,
генерируют цифровое выходное значение (u) по интегрированному отклонению управления и
подают обратно и задерживают цифровое выходное значение (u) по меньшей мере на один, два и три цикла синхронизации и затем вычитают из цифрового выходного значения (u).
2. Система цифрового усилителя для работы системы магнитно-резонансной визуализации (MRI) с градиентным магнитом для генерации градиентных магнитных полей посредством возбуждения токов градиентной катушки в градиентных катушках (GC) системы с градиентным магнитом, причем система усилителя содержит цифровой контроллер (Con) для управления токами градиентной катушки, причем контроллер (Con) реализован в форме контроллера
пространства состояний с обратной связью в области цифровых данных для генерации цифрового выходного значения (u), с помощью которого генерируется широтно-импульсно-модулированное напряжение для возбуждения токов градиентной катушки в градиентных катушках с предварительно определенной формой волны, причем контроллер (Con) содержит интегрирующую часть (GI) для интегрирования отклонения управления, которое генерируется в форме разности между током градиентной катушки и опорным током,
причем контроллер (Con) содержит компенсатор (GSTAB) задержки для генерации цифрового выходного значения (u) по интегрированному отклонению управления и
причем компенсатор (GSTAB) задержки содержит контур обратной связи, посредством которого цифровое выходное значение (u) подается обратно и задерживается по меньшей мере на один, два и три цикла синхронизации и затем вычитается из цифрового выходного значения (u).
3. Система цифрового усилителя по п. 2, в которой компенсатор (GSTAB) задержки содержит контур обратной связи, посредством которого цифровое выходное значение (u) подается обратно через передаточную функцию (GUC, GIC) выходного фильтра (F) градиентной катушки для напряжения градиентной катушки (uC) и выходного тока (iC) и затем вычитается из цифрового выходного значения (u).
4. Система цифрового усилителя по п. 2, в которой контроллер (Con) содержит передаточную функцию (GGC), последовательную с цепью задержки для измеряемого значения тока градиентной катушки (iGC) аналогово-цифрового преобразователя (A/D), посредством которых ток градиентной катушки генерируется по цифровому выходному значению (u).
| WATANABE S ET AL: "Development of digital optimum predictive control implementation for gradient magnetic field current controller in MRI system", POWER CONVERSION CONFERENCE, 2002 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| PROCEEDINGS OF THE OSAKA, JAPAN 2-5 APRIL 2002, PISCATAWAY, NJ, USA,IEEE, US, vol | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

