Изобретение относится к области гравиметрии и может быть использовано в баллистических гравиметрах для симметричного способа измерений абсолютных значений ускорения свободного падения g.
Существуют гравиметры для определения абсолютного значения ускорения свободного падения g путем измерения параметров свободного полета вертикально подброшенной вверх пробной массы (пробного тела) [1].
Основными элементами такого гравиметра являются: вакуумная камера с размещенной в ней катапультой для подбрасывания пробного тела в виде уголкового оптического отражателя, лазерный интерферометр перемещений, электронно-счетная система для обработки интерференционного сигнала с выхода интерферометра с целью вычисления g и управления работой катапульты.
Известен баллистический гравиметр, в котором катапульта для подбрасывания пробного тела выполнена в виде якоря соленоида и направляющих элементов для вертикального движения якоря [2].
Недостатком известной катапульты с соленоидным электромагнитным приводом является то, что при броске пробного тела присутствует отдача, которая через механическую связь воздействует на отсчетную систему - лазерный интерферометр, возбуждая в нем вертикальные колебания и внося погрешность в результат измерения g.
Наиболее близким по своей технической сущности к предлагаемому изобретению является баллистический гравиметр для симметричного способа измерений ускорения свободного падения g, содержащий пробное тело с оптическим отражателем, вакуумную камеру, каретку толкателя с направляющими элементами, соленоидный электромагнитный привод, состоящий из якоря и катушки (обмотки), причем каретка толкателя связана с якорем соленоида равноплечим пантографом, обеспечивая при этом уменьшение отдачи катапульты при подбрасывании пробного тела [3].
В данном гравиметре за счет уменьшения отдачи катапульты при подбрасывании пробного тела обеспечивается повышение точности измерения ускорения свободного падения g.
Недостатком известного технического решения является многоступенчатая передача энергии от электрического источника, питаемого обмотку катушки, на вертикальное перемещение каретки с пробным телом. Обеспечение указанного преобразования энергии осуществляется через перемещение якоря вниз, осевое расжимание и радиальное сжимание пантографа относительно неподвижной оси, механическое взаимодействие подшипников каретки и якоря с направляющими элементами. При осевом расжимании пантографа происходит механическое взаимодействие значительного числа шарнирных элементов как между собой, так и с неподвижной осью, которая соединена с вакуумной камерой.
За счет значительной осевой высоты пантографа в баллистическом гравиметре возрастают габариты нерабочей зоны вакуумной камеры. Создание указанного толкателя обуславливает высокие требования к размерам, массе и контактным поверхностям его механических элементов для недопущения радиальных сил, вызывающих отклонение пробного тела от вертикальной оси.
Поскольку указанный электро-, магнитно-, механический толкатель механически связан с другими неподвижными элементами, например со стенками вакуумной камеры, то при работе баллистический гравиметр подвергается воздействию различных механических колебаний, вызванных ударно-вибрационными процессами. Эти вибрации представляют собой нестационарный случайный процесс и вызывают появление детерминированной основы в погрешности измерений, которая может изменяться.
Такие систематические составляющие погрешности не могут быть уменьшены проведением повторных измерений, и дальнейшее повышение динамической точности может быть достигнуто за счет уменьшения (в идеале до нуля) количества механических взаимодействий подвижных с неподвижными элементами.
В известном баллистическом гравиметре из-за механического взаимодействия подвижных с неподвижными элементами при работе в вакууме необратимо изменяются контактные поверхности: возникают микроскопические трещины, разрушаются поверхностные, например окисные, пленки, повышается коэффициент трения, а износ элементов может достичь недопустимых величин, исключающих нормальное функционирование гравиметра [4].
Взаимодействие ферромагнитного якоря с обмоткой катушки электромагнитного привода не позволяет из-за нелинейной кривой намагничивания и насыщения ферромагнитного материала регулировать скорость каретки толкателя в необходимых пределах с обеспечением заданной величины.
Задачей изобретения является повышение точности баллистического гравиметра за счет прямого преобразования электрической энергии в кинетическую, уменьшение габаритов и повышение регулировочных характеристик привода.
Поставленная задача решается за счет того, что в известном баллистическом гравиметре для симметричного способа измерений ускорения свободного падения, содержащем пробное тело с оптическим уголковым отражателем, вакуумную камеру, толкатель пробного тела, направляющие элементы, электромеханический привод, состоящий из коаксиально расположенных якоря и катушки с обмоткой, в соответствии с предлагаемым изобретением электромеханический привод индукционно-динамического типа выполнен в виде обмотки дисковой формы, подключаемой к емкостному накопителю энергии и расположенной в катушке из изоляционного материала, якорь выполнен в виде диска из электропроводящего материала, нижняя сторона которого обращена к верхней стороне обмотки катушки, а верхняя сторона соединена с силовым толкающим диском так, что упорядочено расположенные в тангенциальном направлении на одном радиусе силового диска, по крайней мере, три отверстия с подшипниками охватывают направляющие элементы, выполненные в виде вертикальных стоек круглого сечения, при этом обмотка соединена с емкостным накопителем энергии посредством двух встречно-параллельно соединенных управляемых тиристоров, один из которых обеспечивает начальное отталкивание, а другой - последующее торможение якоря относительно обмотки катушки.
Кроме того, массивная силовая плита, на которой зафиксированы катушка и радиально охватывающие ее вертикальные стойки, установлена на демпферах на днище вакуумной камеры.
Кроме того, к днищу пробного тела аксиально присоединен направляющий конус, форма боковых стенок которого совпадает с формой направляющей конусообразной аксиальной выемки катушки, а в якоре и силовом диске выполнены центральные отверстия для направляющего конуса.
Кроме того, вертикальные стойки, обеспечивающие свободное вертикальное перемещение якоря с силовым диском, в нижней части выполнены с увеличенным диаметром для подшипников силового диска, в верхней части выполнены с уменьшенным диаметром, причем указанные части вертикальных стоек плавно соединены конусообразными участками.
Кроме того, катушка расположена снаружи вакуумной камеры, на концах вертикальных стоек установлены упругие демпферы и силовой диск соединен с пробным телом.
Кроме того, вертикальные стойки, обеспечивающие фиксированное вертикальное перемещение якоря с силовым диском и свободное вертикальное перемещение пробного тела, в верхней части соединены с установленными на массивной силовой плите горизонтальными упорами, к которым присоединены упругие демпферы, так что установленные на вертикальных участках горизонтальных упоров упругие элементы обеспечивают удержание якоря с силовым диском при отсутствии взаимодействия пробного тела с силовым диском.
Кроме того, при обеспечении фиксированного вертикального перемещения якоря с силовым диском и свободного вертикального перемещения пробного тела на охватывающих вертикальные стойки подшипниках установлены коаксиальные зацепы, верхняя расширенная часть которых взаимодействует с упругими элементами захватов, соединенных с горизонтальными упорами, обеспечивая удержание якоря с силовым диском при отсутствии взаимодействия пробного тела с силовым диском.
Кроме того, наружный и внутренний диаметры якоря и обмотки катушки выполнены одинаковыми.
Кроме того, якорь выполнен из меди.
Кроме того, обмотка катушки замоноличена эпоксидным компаундом.
В предлагаемом баллистическом гравиметре осуществляется непосредственная передача энергии от электрического источника, питаемого обмотку катушки, на вертикальное перемещение пробного тела. При таком электромеханическом преобразовании энергии посредством магнитного поля не происходит механического взаимодействия различных механических элементов между собой и с вакуумной камерой.
Поскольку толщина (высота) и якоря и силового диска мала, то существенно уменьшается высота гравиметра за счет устранения нерабочей зоны вакуумной камеры. Изготовление круглого якоря и силового диска может быть выполнено легко на токарном станке, не требуя сложных технологических операций.
Обмотка катушки и якорь работают в линейной среде в магнитном отношении, что позволяет легко регулировать импульс возбуждения тока в обмотке для изменения высоты подбрасывания пробного тела. Обмотка дисковой формы, магнитно взаимодействующая с электропроводящим дисковым якорем, образует индукционно-динамический привод, обеспечивающий бесконтактное преобразование электрической энергии емкостного накопителя в кинетическую энергию вертикального перемещения пробного тела. Одинаковый наружный и внутренний диаметры якоря и обмотки катушки способствуют повышенной эффективности указанного привода. Этой же цели служит и выполнение якоря из меди - относительно дешевого и высоко электропроводящего материала.
Емкостный накопитель может продолжительное время заряжаться от внешнего источника малым током, например от автономного аккумулятора, и разряжаться на обмотку катушки за короткое время большим током, что важно для создания механического импульса отталкивания якоря.
Поскольку обмотка соединена с емкостным накопителем энергии посредством двух встречно-параллельно соединенных тиристоров, то при подаче напряжения на управляющий электрод первого тиристора обеспечивается начальное отталкивание якоря от обмотки катушки, а при подаче через определенное время напряжения на управляющий электрод второго тиристора обеспечивается электродинамическое торможение якоря, что исключает его резкий удар об обмотку катушки.
Замоноличивание обмотки катушки (заливка с последующим затвердением) эпоксидным компаундом делает такую конструкцию прочной, цельной и надежной.
Близкое расположение якоря с верхней стороной обмотки обеспечивает максимальную магнитную связь между ними. Силовой толкающий диск служит для передачи кинетической энергии пробному телу и препятствует деформации (изгибанию) медного якоря.
Выполнение направляющих элементов в виде вертикальных стоек круглого сечения позволяет обеспечивать строго горизонтальное положение при перемещении силового диска с якорем в вертикальном направлении. Это достигается за счет наличия упорядочено расположенных в тангенциальном направлении на одном радиусе, по крайней мере, трех отверстий с подшипниками, охватывающих указанные вертикальные стойки.
Установка массивной силовой плиты, на которой зафиксированы катушка и радиально охватывающие ее вертикальные стойки, на демпферах на днище вакуумной камеры, позволяет существенно уменьшить передачу силового импульса вакуумной камере и ее вибрационные процессы, что важно для измерительной системы гравиметра.
Присоединение к днищу пробного тела вдоль его оси направляющего конуса и выполнение направляющей конусообразной осевой выемки в катушке с совпадающими формами боковых стенок позволяют легко центрировать пробное тело в исходном и конечном (после подбрасывания) состоянии относительно обмотки катушки, обеспечивая строго вертикальное перемещение пробного тела.
При обеспечении свободного вертикального перемещения якоря с силовым диском и пробным телом вертикальные стойки в нижней части выполнены с увеличенным диаметром для подшипников силового диска, в верхней части выполнены с уменьшенным диаметром, причем указанные части вертикальных стоек плавно соединены конусообразными участками. В нижней части строго горизонтальное положение перемещаемого силового диска задается взаимодействием подшипников с расширенной частью стоек, а на большей высоте полета указанные подшипники не соприкасаются со стойками, что исключает их влияние на величину ускорения свободного падения, обеспечивая лишь страховку от аварийного бокового смещения силовой пластины с прикрепленным к ней пробным телом. Конусообразные участки вертикальных стоек позволяют плавно «ловить» падающие вниз элементы, обеспечивая центрирование их относительно обмотки катушки.
При обеспечении фиксированного вертикального перемещения якоря с силовым диском и свободного вертикального перемещения пробного тела в верхней части вертикальные стойки соединены с горизонтальными упорами. Размещение их на массивной силовой плите исключает передачу силовых импульсов вакуумной камере. Упругие демпферы устраняют резкий удар силового диска о горизонтальные упоры, что также способствует уменьшению вибрационных процессов. Наличие упругих элементов на вертикальных участках горизонтальных упоров обеспечивает фиксирование якоря с силовым диском от падения и сжимание (уменьшение внутреннего диаметра) при взаимодействии пробного тела с силовым диском.
На фиг.1 схематично показан баллистический гравиметр с индукционно-динамическим приводом, обеспечивающий свободное вертикальное перемещение якоря с силовым диском и пробным телом, у которого катушка расположена внутри вакуумной камеры, в исходном состоянии;
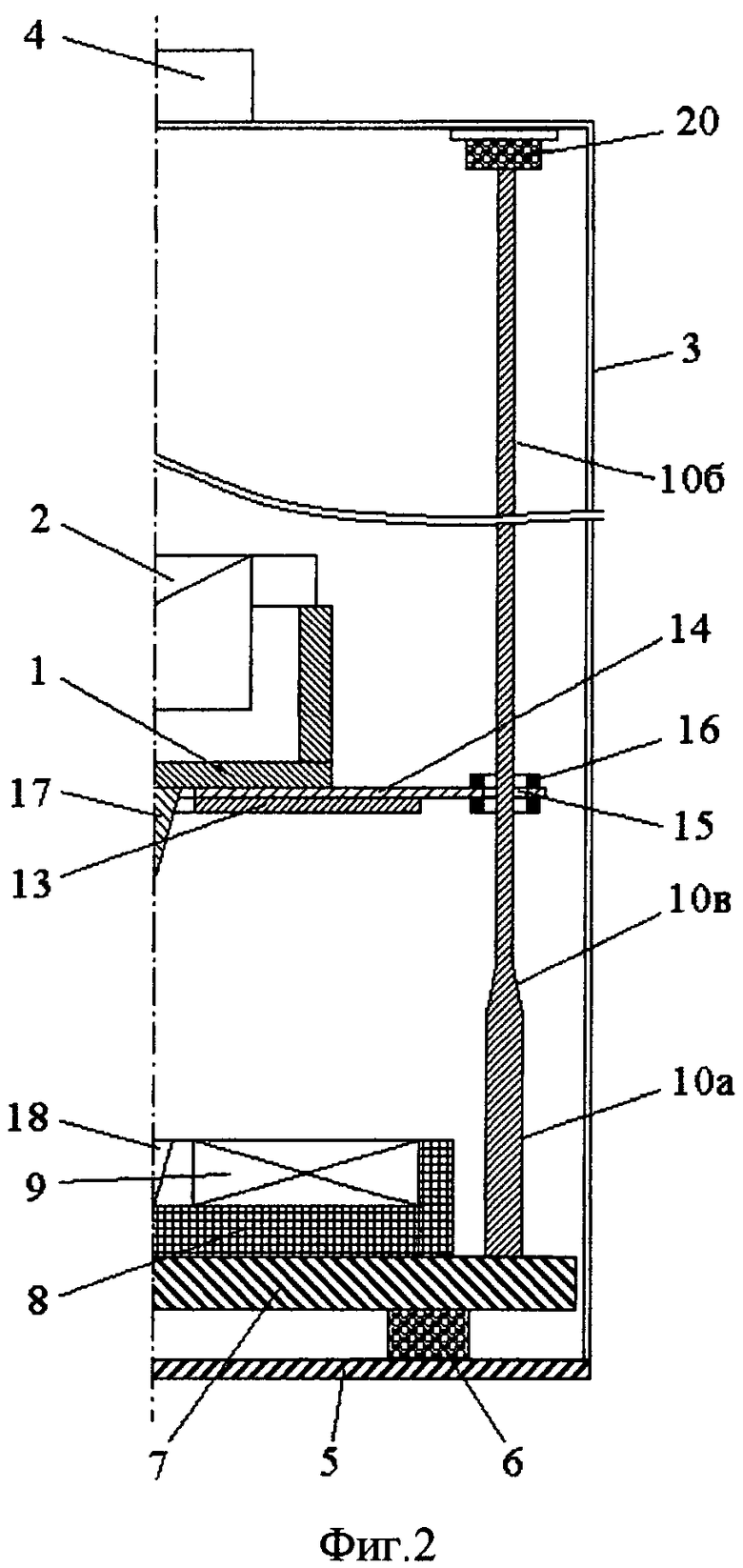
на фиг.2 - баллистический гравиметр на фиг.1 в момент свободного полета якоря с силовым диском и пробным телом;
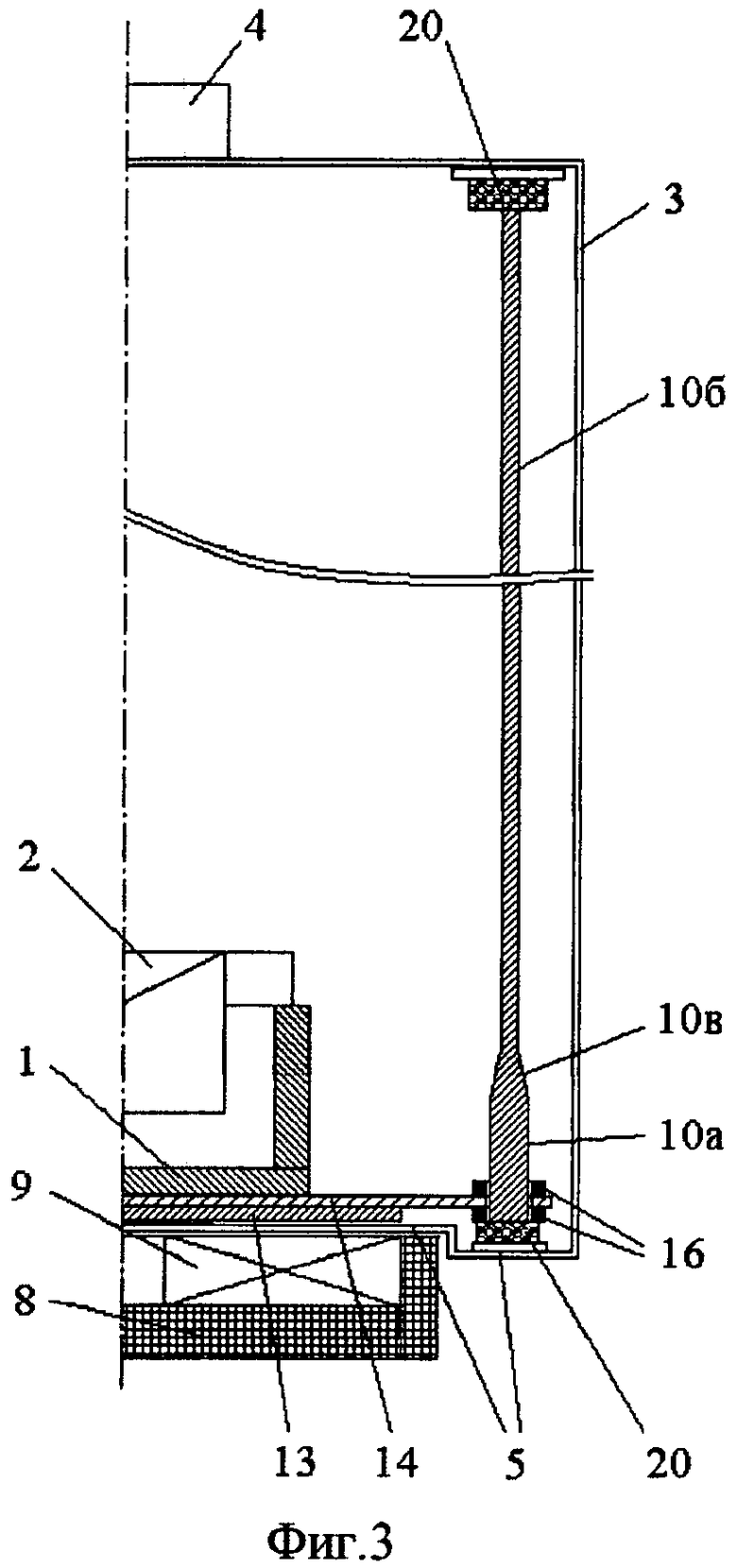
на фиг.3 - баллистический гравиметр, обеспечивающий свободное вертикальное перемещение якоря с силовым диском и пробным телом, у которого катушка расположена снаружи вакуумной камеры, в исходном состоянии;
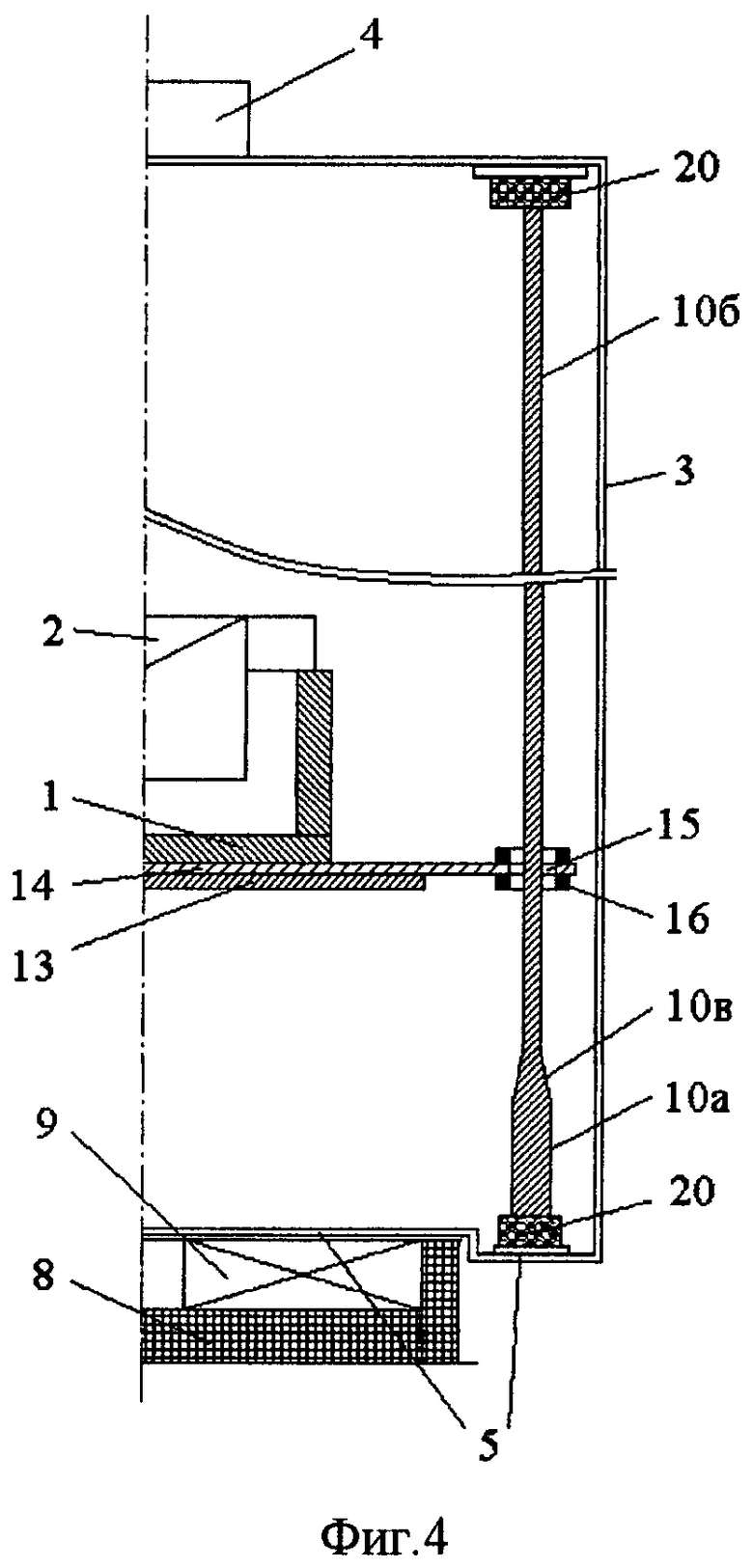
на фиг.4 - баллистический гравиметр на фиг.3 в момент свободного полета якоря с силовым диском и пробным телом;
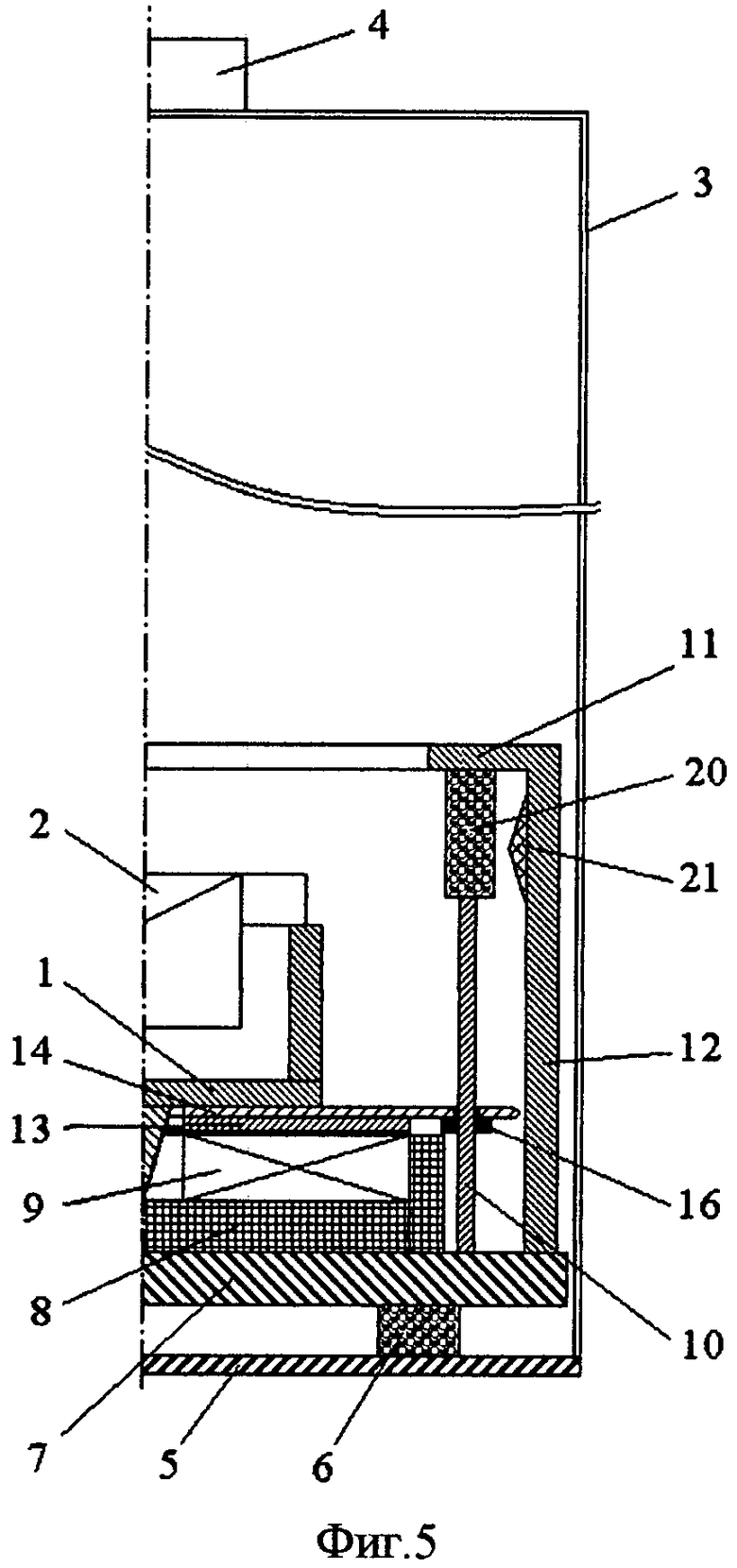
на фиг.5 - баллистический гравиметр, обеспечивающий фиксирование якоря с силовым диском упругими элементами, установленными на вертикальных участках горизонтальных упоров, и свободное вертикальное перемещение пробного тела, в исходном состоянии;
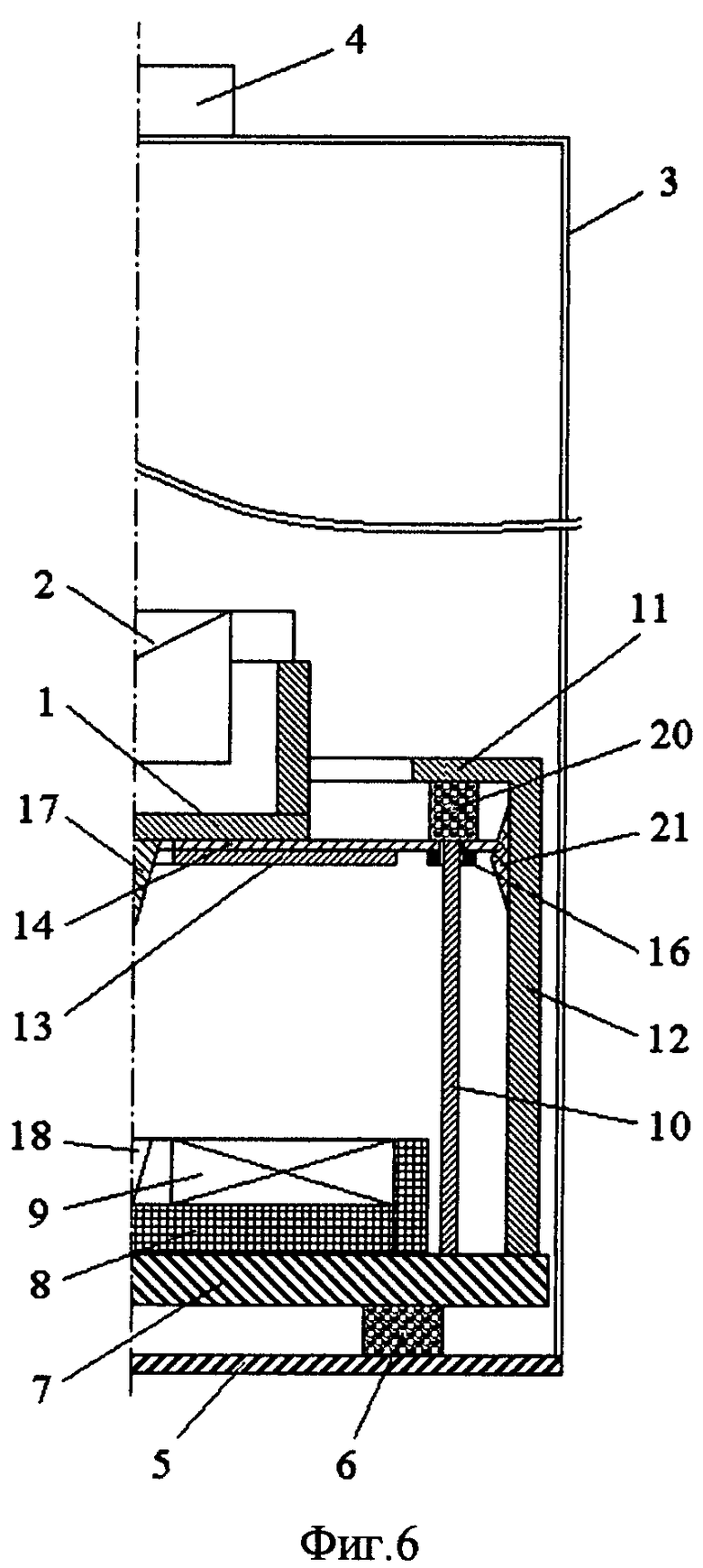
на фиг.6 - баллистический гравиметр на фиг.5 в момент фиксирования якоря с силовым диском упругими элементами;
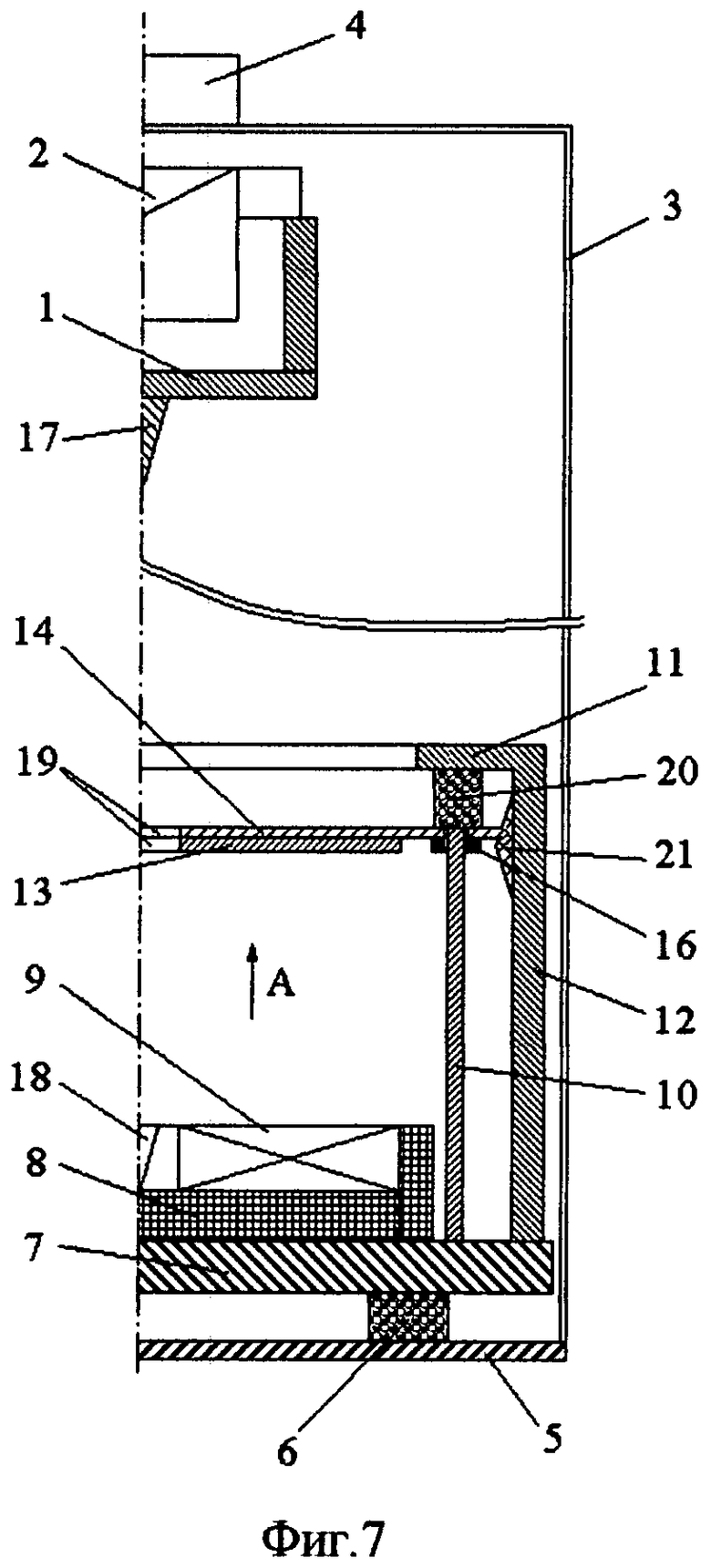
на фиг.7 - баллистический гравиметр на фиг.5 в момент свободного вертикального перемещения пробного тела;
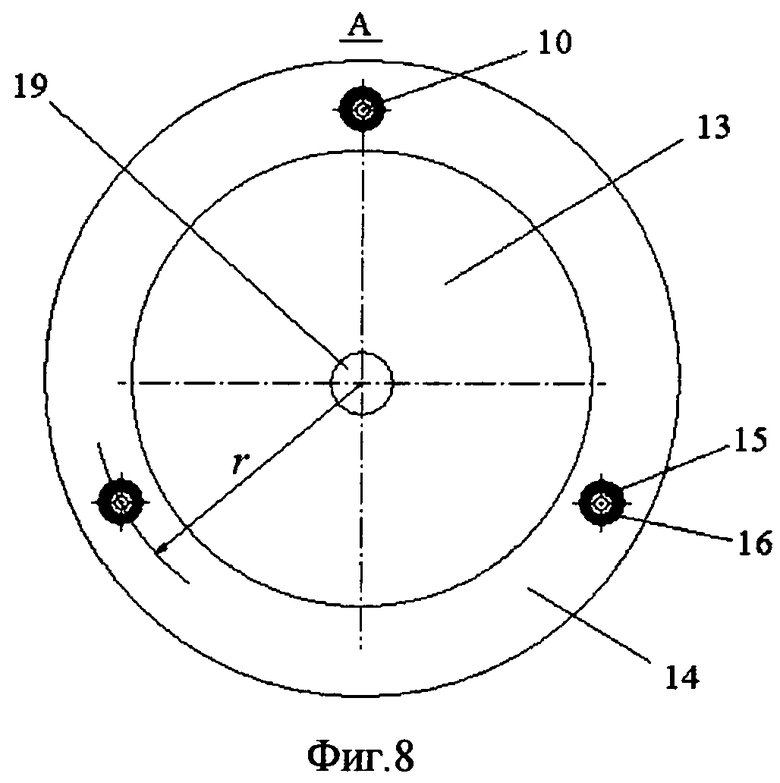
на фиг.8 - вид А на фиг.7;
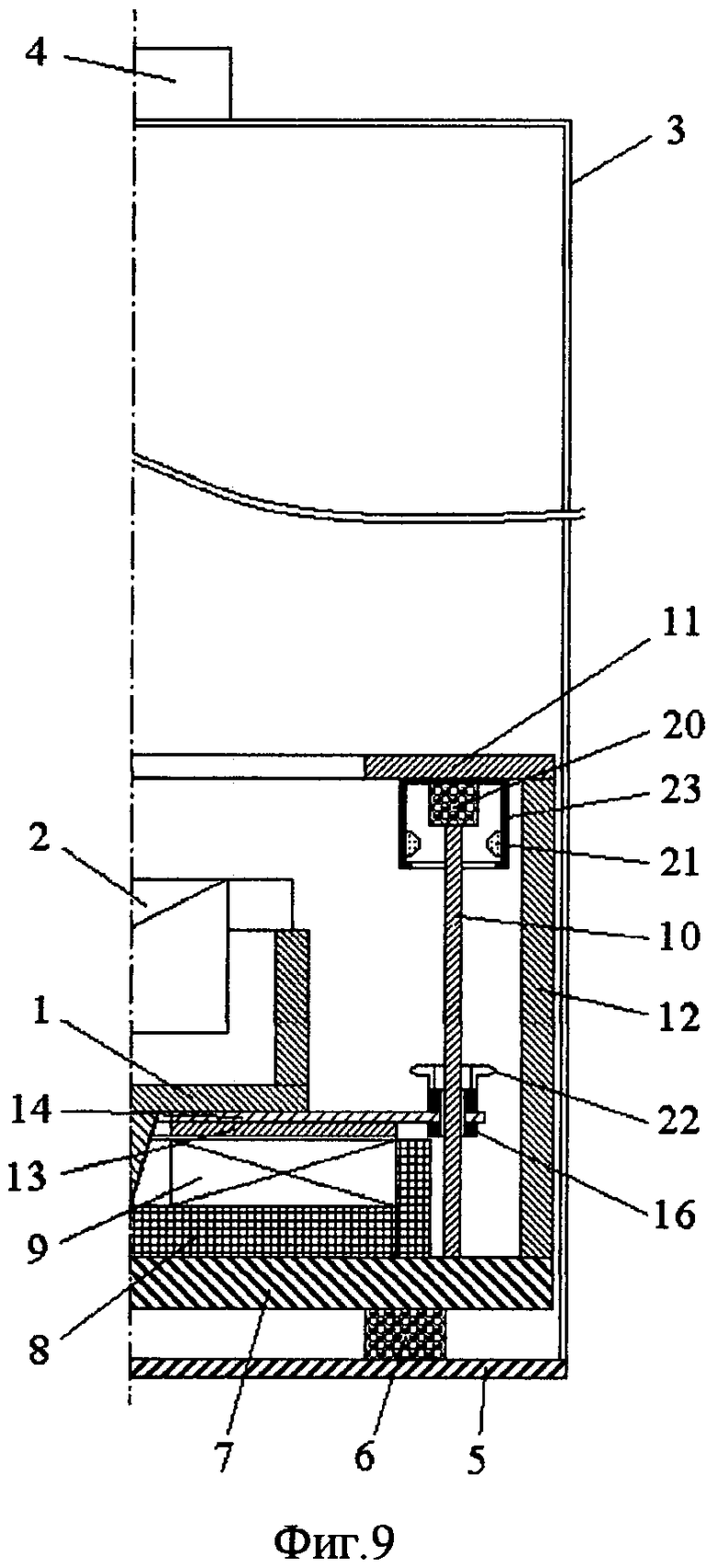
на фиг.9 - баллистический гравиметр, обеспечивающий фиксирование якоря с силовым диском захватами, и свободное вертикальное перемещение пробного тела, в исходном состоянии;
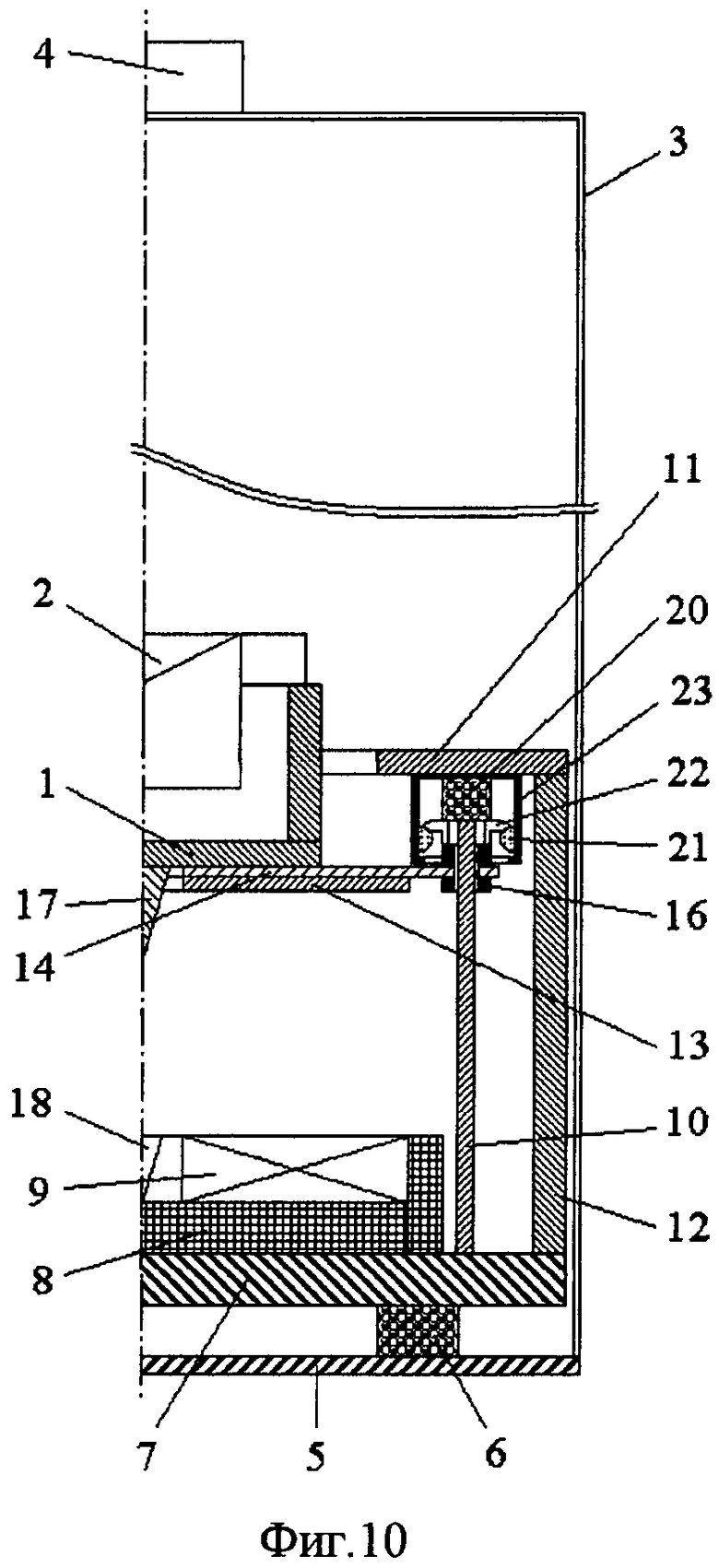
на фиг.10 - баллистический гравиметр на фиг.9 в момент фиксирования якоря с силовым диском.
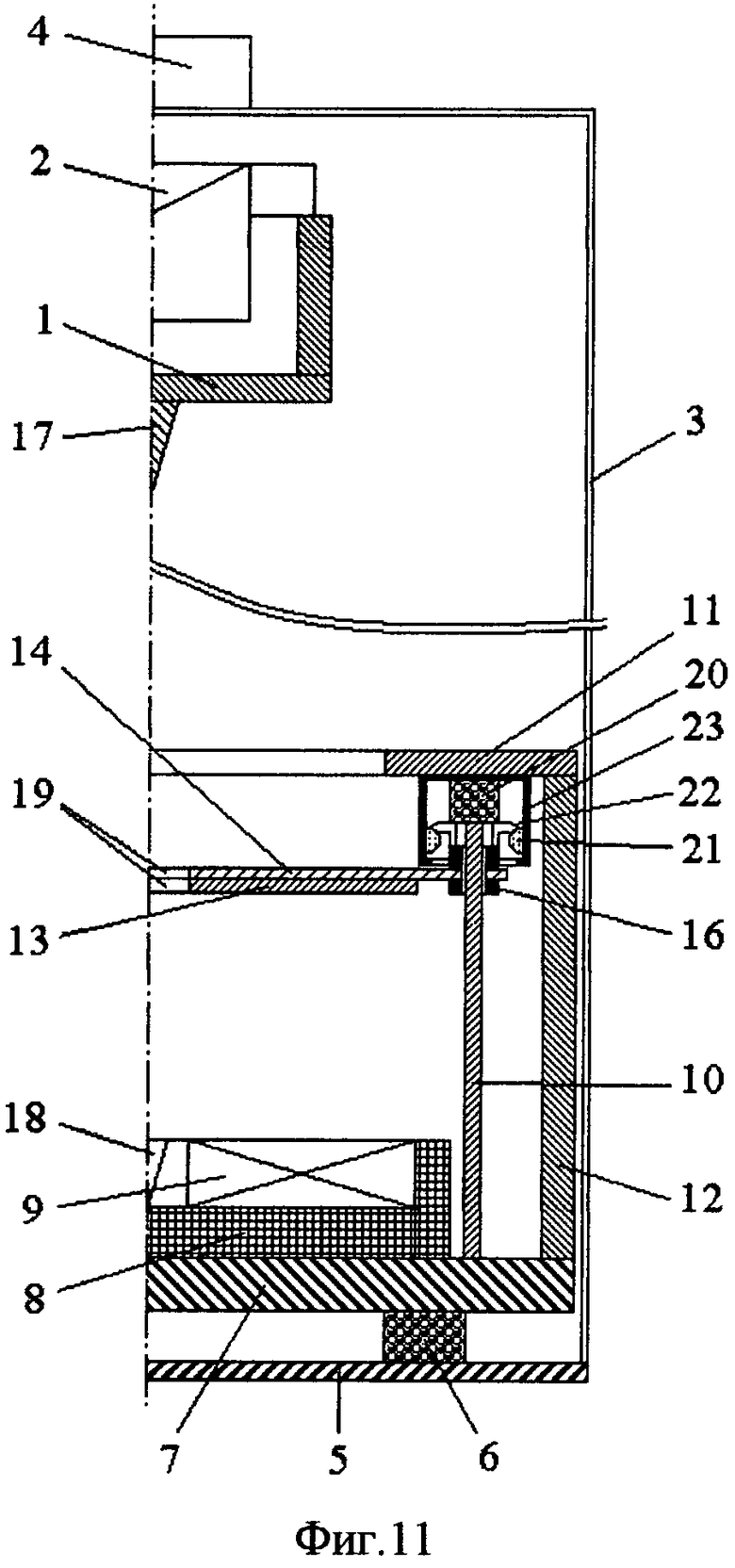
на фиг.11 - баллистический гравиметр на фиг.9 в момент свободного вертикального перемещения пробного тела;
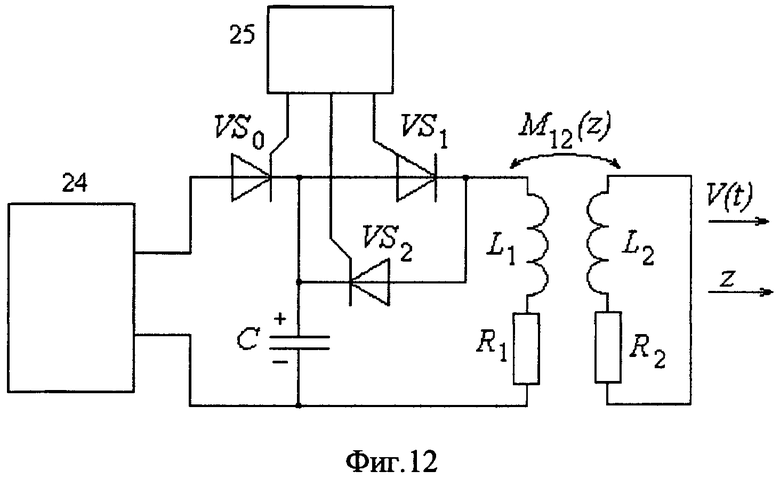
на фиг.12 - электрическая схема индукционно-динамического привода баллистического гравиметра, где L1, R1 - индуктивность и сопротивление обмотки; L2, R2 - индуктивность и сопротивление якоря; M12 - взаимная индуктивность между обмоткой и якорем; V - скорость перемещения якоря вдоль вертикальной оси z; t - время; С - емкость емкостного накопителя энергии; VS0, VS1, VS2 - тиристоры соответственно, на зарядку емкостного накопителя, на отталкивание и торможение якоря относительно обмотки катушки;
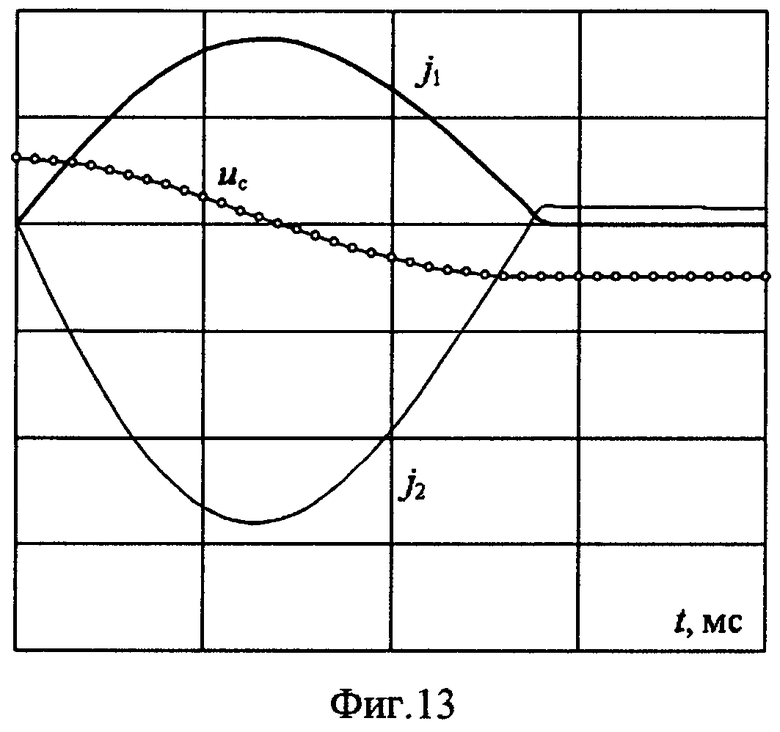
фиг.13 - напряжение емкостного накопителя uC, плотности тока в обмотке катушки j1 и якоре j2;
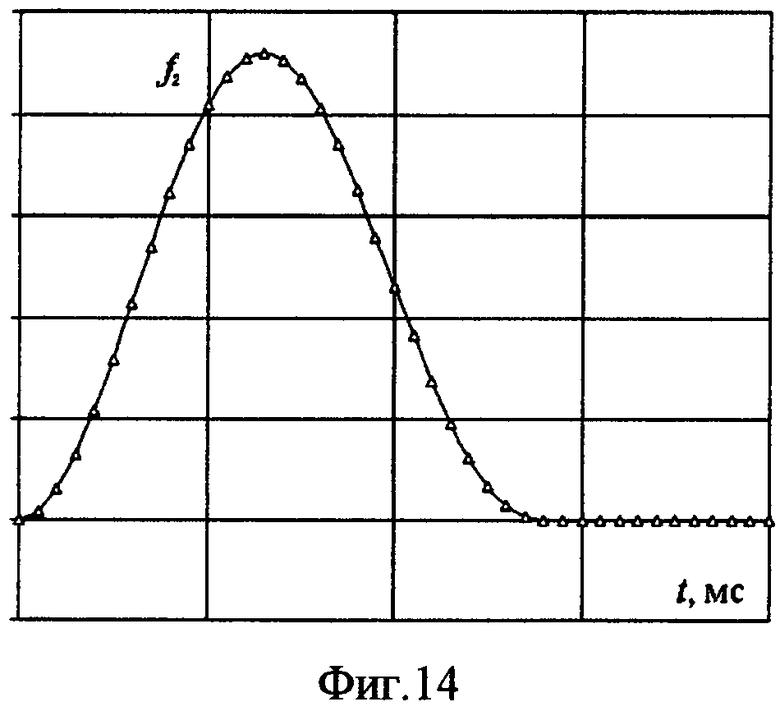
на фиг.14 - импульс электродинамической силы fz, действующей на якорь;
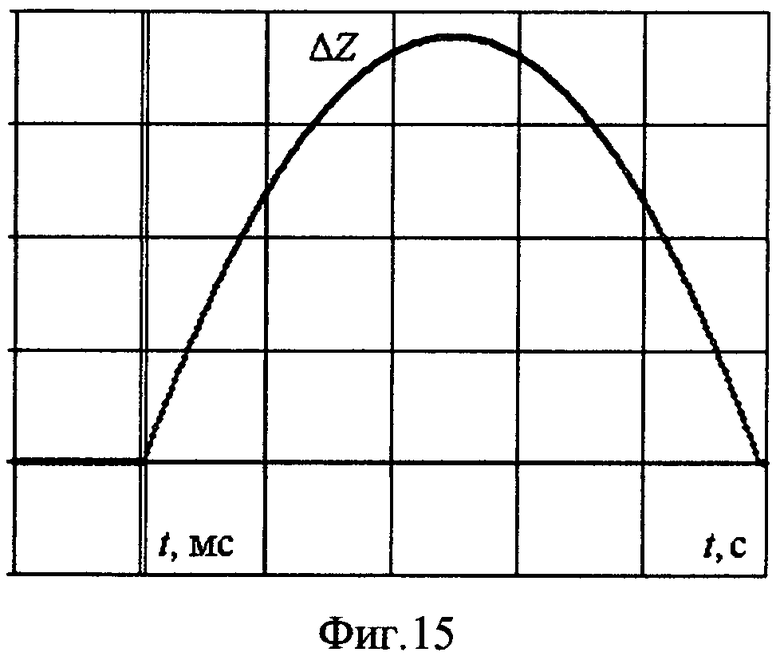
на фиг.15 - свободное вертикальное перемещение ΔZ якоря с силовым диском и пробным телом на двух часовых интервалах.
Баллистический гравиметр с индукционно-динамическим приводом для симметричного способа измерений ускорения свободного падения содержит пробное тело 1 с оптическим уголковым отражателем 2, вакуумную камеру 3, на верхней стенки которой через оптическое стекло (на фиг. не показано) установлен оптический излучатель 4. На днище 5 вакуумной камеры 3 на демпферах 6 установлена массивная силовая плита 7 (фиг.1, 2, 5-7, 9-11). На плите 7 зафиксированы катушка 8 с обмоткой 9, направляющие элементы в виде вертикальных стоек 10 круглого сечения и горизонтальные упоры 11 с вертикальными участками 12.
Катушка 8 выполнена из изоляционного материала, например стеклотекстолита. Обмотка 9 имеет форму диска, замоноличена эпоксидным компаундом и расположена внутри катушки 8.
В вакуумной камере 3 расположен якорь 13, который соединен с силовым толкающим диском 14. Якорь выполнен в виде диска из электропроводящего материала, например меди. Силовой диск выполнен из прочного материала, например нержавеющей стали.
Наружный и внутренний диаметры якоря 13 и обмотки 9 катушки выполнены одинаковыми. В исходном состоянии нижняя сторона якоря 13 соприкасается с верхней стороной обмотки 9 катушки 8 (фиг.1, 2, 5-7, 9-11).
Пробное тело 1 либо соединено с силовым толкающим диском 14 (фиг.1-4), либо свободно установлено без механического соединения (фиг.5-7, 9-11).
В силовом толкающем диске 14 расположены упорядочено в тангенциальном направлении (например, под углом 120°) на одном радиусе r три отверстия 15 с подшипниками 16, которые охватывают вертикальные стойки 10 (фиг.8).
К днищу пробного тела 1 аксиально присоединен направляющий конус 17, форма боковых стенок которого совпадает с формой направляющей конусообразной аксиальной выемки 18 катушки 8. В якоре 13 и силовом диске 14 выполнены центральные отверстия 19 для направляющего конуса.
Вертикальные стойки 10, обеспечивающие свободное вертикальное перемещение якоря 13 с силовым диском 14, в нижней части 10а выполнены с увеличенным диаметром для подшипников 16 силового диска, в верхней части 10б выполнены с уменьшенным диаметром, причем указанные части вертикальных стоек плавно соединены конусообразными участками 10в (фиг.1-4).
Вертикальные стойки 10, обеспечивающие фиксированное вертикальное перемещение якоря 13 с силовым диском 14 и свободное вертикальное перемещения пробного тела 1, в верхней части соединены с горизонтальными упорами 11, к которым присоединены упругие демпферы 20.
Установленные на вертикальных участках 12 горизонтальных упоров 11 упругие элементы 21 обеспечивают удержание якоря 13 с силовым диском при отсутствии взаимодействия (контакта) пробного тела 1 с диском 14 (фиг.5-7).
В баллистическом гравиметре на фиг.3, 4 катушка 8 расположена снаружи вакуумной камеры 3, а в днище 5 камеры 3 имеется выемка для катушки, что упрощает их установку, на концах вертикальных стоек 10 установлены упругие демпферы 20 и силовой диск 14 соединен с пробным телом 1.
На подшипниках 16, охватывающих вертикальные стойки 11, установлены коаксиальные зацепы 22, верхняя расширенная часть которых взаимодействует с упругими элементами 21 захватов 23. Захваты 23 соединены с горизонтальными упорами 11 и обеспечивают удержание якоря 13 с силовым диском 14 при отсутствии взаимодействия (контакта) пробного тела 1 с силовым диском (фиг.9-11).
Электромеханический привод индукционно-динамического типа выполнен в виде подвижного якоря 13, который магнитно взаимодействует с неподвижной обмоткой 9, подключаемой к емкостному накопителю энергии С посредством двух тиристоров VS1 и VS2 (фиг.12). Указанные тиристоры соединены встречно-параллельно между собой и предназначены для обеспечения начального отталкивания (VS2) и последующего торможения (VS2) якоря относительно обмотки катушки.
Тиристор VS0 предназначен для обеспечения зарядки емкостного накопителя С от источника питания 24. Управляющие электроды тиристоров VS0, VS1 и VS2 подсоединены к блоку управления 25.
Баллистический гравиметр, обеспечивающий свободное вертикальное перемещение якоря с силовым диском, работает следующим образом (фиг.1-4).
В исходном состоянии (фиг.1 и фиг.3) пробное тело 1 с оптическим уголковым отражателем 2 находятся в нижнем положении, при котором обеспечивается максимальная магнитная связь между обмоткой 9 и якорем 13 индукционно-динамического привода.
При подаче сигнала с блока управления 25 на тиристор VS0 осуществляется зарядка емкостного накопителя С от источника питания 24. После зарядки тиристор VS0 закрывается.
При подаче сигнала с блока управления 25 тиристор VS1 открывается и начинается разряд емкостного накопителя С на обмотку 9 катушки 8. При этом в обмотке возникает однополярный импульс тока плотностью j1 (фиг.13) из-за того, что тиристор обладает односторонней проводимостью. Под действием тока обмотки возникает магнитное поле, наводящее в якоре 13 ток плотностью j2. Емкостной накопитель при этом изменяет полярность напряжения uC на противоположную с пониженной величиной по отношению к исходной. Тиристор VS1 закрывается.
Поскольку токи обмотки 9 и якоря 13 имеют противоположную полярность, между ними возникает импульс аксиальной электродинамической силы fz (фиг.13) отталкивания, под действием которого якорь 13 вместе с силовым диском 14 и пробным телом 1 совершают свободное вертикальное перемещение ΔZ (фиг.15). При этом включается оптический излучатель 4, воздействующий на оптический уголковый отражатель 2, и осуществляется симметричный способ измерения ускорения свободного падения.
При падении якоря 13 вниз в момент приближения его к обмотке 9 с блока управления 25 на тиристор VS2 поступает сигнал на его открывание и начинается разряд емкостного накопителя С на обмотку 9 катушки 8. Поскольку напряжение емкостного накопителя uC при этом меньше исходного, то возникающая электродинамическая сила fz отталкивания от обмотки 9 достаточна лишь для плавного торможения падающего вниз якоря 13.
На начальном и конечном участках движения пробного тела 1 по нижним частям 10а вертикальных стоек движутся подшипники 16, обеспечивающие строго горизонтальное положение силового диска 14. На среднем участке движения пробного тела 1 верхние части 106 стоек не соприкасаются с подшипниками 16, что обеспечивает полностью бесконтактное перемещение пробного тела 1, а значит и максимальную точность измерения ускорения свободного падения g.
За счет взаимодействия подшипников 16 с нижними частями 10а вертикальных стоек и аксиального направляющего конуса 17 с аксиальной выемкой 18 катушки 8 обеспечивается расположение якоря 13 относительно обмотки 9 строго аксиальное как при начале, так и при окончании работы баллистического гравиметра.
Баллистический гравиметр, обеспечивающий фиксированное вертикальное перемещение якоря с силовым диском и свободное вертикальное перемещение пробного тела, работает следующим образом (фиг.5-7, 9-11).
В исходном состоянии (фиг.5 и фиг.9) пробное тело 1 с оптическим уголковым отражателем 2 находятся в нижнем положении. При подаче сигнала с блока управления 25 на тиристор VS0 осуществляется зарядка емкостного накопителя С от источника питания 24. После подачи сигнала с блока управления 25 на тиристор VS1 начинается разряд емкостного накопителя С на обмотку 9, и якорь 13 вместе силовым диском 14 и пробным телом 1 совершают вертикальное перемещение.
Подлетая к горизонтальным упорам 11, силовой диск 14 сжимает упругие демпферы 20 и упругие элементы 21 (фиг.6). При этом диск 14 плавно тормозится, приближаясь к горизонтальным упорам 11, упругие элементы 21 разжимаются, а пробное тело 1 покидает силовой диск 14, продолжая свободное вертикальное движение.
В процессе свободного полета пробного тела 1 осуществляется измерение ускорения свободного падения. Фиксированный относительно горизонтальных упоров 11 силовой диск 14 с якорем 13 удерживается разжатыми упругими элементами 21 (фиг.7).
В момент падения пробного тела 1 происходит его контакт с силовым диском (фиг.6), упругие элементы 21 разжимаются и осуществляется совместное падение силового диска 14, якоря 13 и пробного тела 1. В момент приближения якоря к обмотке 9 с блока управления 25 на тиристор VS2 поступает сигнал на его открывание и начинается разряд емкостного накопителя С на обмотку 9, приводящий к плавному торможению падающего вниз якоря 13.
За счет взаимодействия подшипников 16 с вертикальными стойками 10 и аксиального направляющего конуса 17 с аксиальной выемкой 18 катушки 8 обеспечивается расположение якоря 13 относительно обмотки 9 строго аксиальное как в начале, так и по окончании работы баллистического гравиметра. Высота стоек 10 может быть небольшой, что обусловливает небольшую высоту баллистического гравиметра.
Массивная силовая плита 7 совместно с демпферами 6 позволяет практически полностью гасить возникающие вибрационные процессы, не пропуская их к вакуумной камере 3.
Аналогично рассмотренному варианту (фиг.5-7) работает и вариант баллистического гравиметра, представленный на фиг.9-11. В этом устройстве на подшипниках 16 установлены коаксиальные зацепы 22, верхняя расширенная часть которых взаимодействует с упругими элементами 21 захватов 23, которые обеспечивают удержание якоря 13 с силовым диском 14 при отсутствии контакта пробного тела 1 с силовым диском (фиг.11).
Предлагаемый индукционно-динамический привод позволяет легко регулировать силу и длительность импульса тока в обмотке 9, что позволяет изменять высоту подбрасывания пробного тела в заданном диапазоне без изменения остальных параметров и положения в пространстве баллистического гравиметра.
Источники информации
1. А.П. Юзефович, Л.В. Огородова. "Гравиметрия". - М.: Недра, 1980.
2. Агрегат 15В 166. Техническое описание ПБ 1.530.001 ТО, МО СССР, 1987.
3. Патент ФР №2192024, МПК G01V 7/14. Баллистический гравиметр для симметричного способа измерений. - Заявка №2001120196/28, 18.07.2001. - Опубликовано 27.10.2002 (прототип).
4. Крагельский И.В. и др. Трение и износ в вакууме. - М.: Машиностроение, 1973. - 216 с.
Изобретение относится к гравиметрии и может быть использовано для измерений абсолютных значений ускорения свободного падения. Согласно изобретению баллистический гравиметр содержит пробное тело 1 с оптическим уголковым отражателем 2, вакуумную камеру 3, оптический излучатель 4. На днище 5 вакуумной камеры 3 на демпферах 6 установлена массивная силовая плита 7, на которой зафиксированы катушка 8 с обмоткой 9, направляющие элементы в виде вертикальных стоек 10 круглого сечения и горизонтальные упоры 11 с вертикальными участками 12. Якорь 13 соединен с силовым диском 14, в котором упорядоченно расположены три отверстия 15 с подшипниками 16, охватывающими вертикальные стойки 10. К днищу пробного тела 1 присоединен направляющий конус 17. Электромеханический привод индукционно-динамического типа содержит подвижный якорь 13 и неподвижную обмотку 9, подключаемую к емкостному накопителю энергии посредством двух встречно-параллельно соединенных управляемых тиристоров. Благодаря этому может быть повышена точность баллистического гравиметра, который имеет небольшие габариты и обладает хорошими регулировочными характеристиками привода. 9 з.п. ф-лы, 15 ил.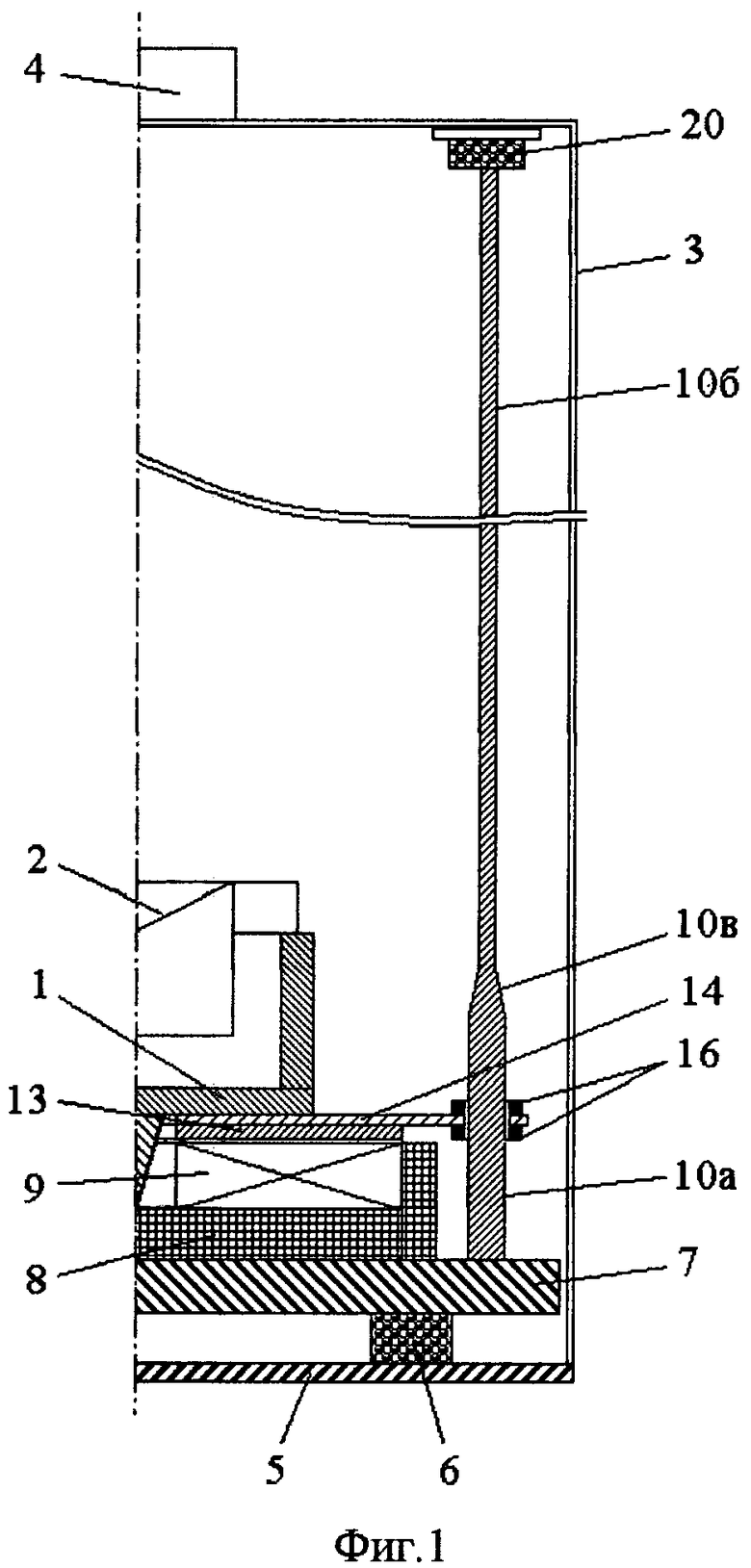
1. Баллистический гравиметр с индукционно-динамическим приводом для симметричного способа измерений ускорения свободного падения, содержащий пробное тело с оптическим уголковым отражателем, вакуумную камеру, толкатель пробного тела, направляющие элементы, электромеханический привод, состоящий из коаксиально расположенных якоря и катушки с обмоткой, отличающийся тем, что электромеханический привод индукционно-динамического типа выполнен в виде обмотки дисковой формы, подключаемой к емкостному накопителю энергии и расположенной в катушке из изоляционного материала, якорь выполнен в виде диска из электропроводящего материала, нижняя сторона которого обращена к верхней стороне обмотки катушки, а верхняя сторона соединена с силовым толкающим диском так, что упорядоченно расположенные в тангенциальном направлении на одном радиусе силового диска, по крайней мере, три отверстия с подшипниками охватывают направляющие элементы, выполненные в виде вертикальных стоек круглого сечения, при этом обмотка соединена с емкостным накопителем энергии посредством двух встречно-параллельно соединенных управляемых тиристоров, один из которых обеспечивает начальное отталкивание, а другой - последующее торможение якоря относительно обмотки катушки.
2. Баллистический гравиметр по п.1, отличающийся тем, что массивная силовая плита, на которой зафиксированы катушка и радиально охватывающие ее вертикальные стойки, установлена на демпферах на днище вакуумной камеры.
3. Баллистический гравиметр по п.1, отличающийся тем, что к днищу пробного тела аксиально присоединен направляющий конус, форма боковых стенок которого совпадает с формой направляющей конусообразной аксиальной выемки катушки, а в якоре и силовом диске выполнены центральные отверстия для направляющего конуса.
4. Баллистический гравиметр по п.1, отличающийся тем, что вертикальные стойки, обеспечивающие свободное вертикальное перемещение якоря с силовым диском, в нижней части выполнены с увеличенным диаметром для подшипников силового диска, в верхней части выполнены с уменьшенным диаметром, причем указанные части вертикальных стоек плавно соединены конусообразными участками.
5. Баллистический гравиметр по п.4, отличающийся тем, что катушка расположена снаружи вакуумной камеры, на концах вертикальных стоек установлены упругие демпферы и силовой диск соединен с пробным телом.
6. Баллистический гравиметр по п.1, отличающийся тем, что вертикальные стойки, обеспечивающие фиксированное вертикальное перемещение якоря с силовым диском и свободное вертикальное перемещение пробного тела, в верхней части соединены с установленными на массивной силовой плите горизонтальными упорами, к которым присоединены упругие демпферы, так что установленные на вертикальных участках горизонтальных упоров упругие элементы обеспечивают удержание якоря с силовым диском при отсутствии взаимодействия пробного тела с силовым диском.
7. Баллистический гравиметр по п.1, отличающийся тем, что при обеспечении фиксированного вертикального перемещения якоря с силовым диском и свободного вертикального перемещения пробного тела на охватывающих вертикальные стойки подшипниках установлены коаксиальные зацепы, верхняя расширенная часть которых взаимодействует с упругими элементами захватов, соединенных с горизонтальными упорами, обеспечивая удержание якоря с силовым диском при отсутствии взаимодействия пробного тела с силовым диском.
8. Баллистический гравиметр по п.1, отличающийся тем, что наружный и внутренний диаметры якоря и обмотки катушки выполнены одинаковыми.
9. Баллистический гравиметр по п.1, отличающийся тем, что якорь выполнен из меди.
10. Баллистический гравиметр по п.1, отличающийся тем, что обмотка катушки замоноличена эпоксидным компаундом.
| БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР ДЛЯ СИММЕТРИЧНОГО СПОСОБА ИЗМЕРЕНИЙ | 2001 |
|
RU2192024C1 |
| Баллистический гравиметр | 1987 |
|
SU1508788A1 |
| Гравиметр для измерения абсолютного ускорения силы тяжести | 1976 |
|
SU628451A1 |
| US 3688584 A, 05.09.1972 | |||
| Гравиметр для измерения абсолютного ускорения свободного падения баллистическим методом | 1991 |
|
SU1827660A1 |

