Изобретение относится к системе регулирования тока, которая содержит по меньшей мере одну продольную ветвь с линейным продольным регулятором для формирования сигнала регулирующего воздействия, причем продольный регулятор соединен с полупроводниковым исполнительным элементом, который подключен к питающему напряжению, соотнесенному с массой, и к которому на выходной стороне приложено выходное напряжение, соотнесенное с массой. Кроме того, изобретение относится к способу для регулирования тока.
Имеются многочисленные электрические и электронные применения, которые требуют регулирования тока. Например, известны системы электроснабжения, которые для выдачи постоянного тока на одну или более подключенных нагрузок используют регулирование тока.
Кроме того, известны электронные предохранители, посредством которых обеспечивается защита одной или более нагрузочных ветвей, подключенных к электроснабжению. Если в нагрузочной ветви имеет место неисправность (например, короткое замыкание), то электронный предохранитель ограничивает ток на короткое время (например, несколько микросекунд) посредством регулирования тока и затем отключает. Другие нагрузочные ветви продолжают снабжаться энергией от системы электроснабжения. Также для кратковременных токов перегрузки, например, вследствие процесса включения, электронные предохранители ограничивают ток до заданного значения.
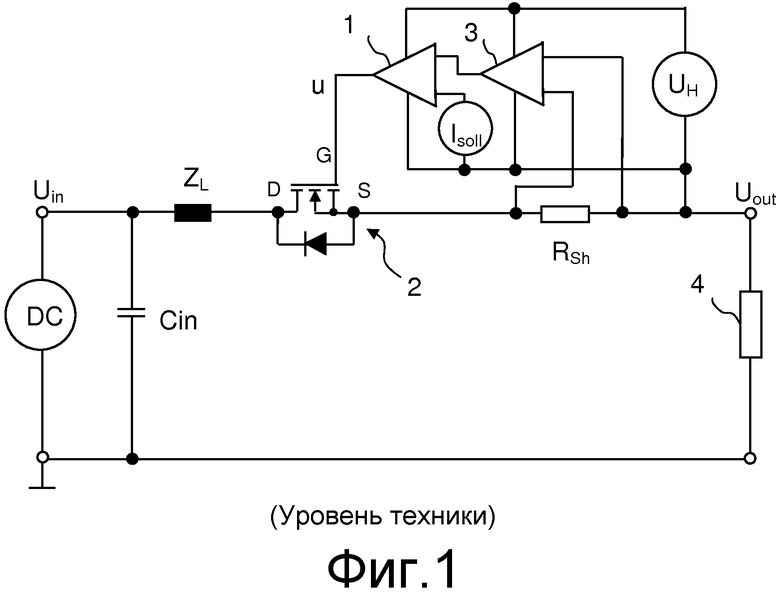
При подобных случаях применения, которые предусматривают только кратковременное ограничение тока или регулирование тока, чаще всего используются простые линейные продольные регуляторы. Такие продольные регуляторы управляют полупроводниковым исполнительным элементом, который кратковременно получает энергию, чтобы поддерживать ток через подключенную неисправную нагрузку на заданном значении. Схематичная структура соответствующей системы регулирования тока представлена на фиг.1. На питающем напряжении при этом предусмотрена продольная ветвь для регулирования тока через подключенную нагрузку.
Опорное значение или заданное значение для регулирования тока относится, таким образом, как и измеренное значение тока, к выходному напряжению, которое создается на подключенной нагрузке. При этом продольный регулятор получает питание от вспомогательного напряжения, которое в качестве опорного потенциала также имеет выходное напряжение. Вспомогательное напряжение служит для выработки достаточно высокого сигнала регулирующего воздействия между управляющим выводом (затвором) и выходным выводом (истоком) полупроводникового исполнительного элемента.
Если, например, несколько нагрузочных ветвей подключены параллельно к питающему напряжению, для каждого продольного регулятора должно предусматриваться собственное вспомогательное напряжение, так как каждое вспомогательное напряжение, как правило, имеет другое выходное напряжение, чем опорный потенциал.
В основе изобретения лежит задача предоставить для системы регулирования тока вышеназванного типа усовершенствование по отношению к уровню техники. Кроме того, должен быть предоставлен соответственно усовершенствованный способ регулирования тока.
В соответствии с изобретением эта задача решается системой регулирования тока согласно пункту 1 формулы изобретения и способом согласно пункту 7 формулы изобретения.
При этом поданный на продольный регулятор опорный сигнал, сигнал измерения тока и сигнал регулирующего воздействия отнесены к массе, причем сигнал регулирующего воздействия подается на формирователь разности, который с сигналом регулирующего воздействия суммирует выходное напряжение и вычитает питающее напряжение, и причем сформированный таким образом выходной сигнал формирователя разности подается на полупроводниковый исполнительный элемент как скорректированный сигнал регулирующего воздействия. Таким образом исключается то, что система регулирования тока начинает колебаться ввиду импедансов на участке регулирования. Частота подобного колебания лежала бы выше предельной частоты продольного регулятора. Так как коррекция сигнала регулирующего воздействия посредством формирователя разности, ввиду простой вычислительной операции, происходит практически без задержки, за счет регулирования полупроводникового исполнительного элемента скорректированным сигналом регулирующего воздействия предотвращается колебание участка регулирования, благодаря тому что напряжение между управляющим выводом и выходным выводом полупроводникового исполнительного элемента остается по существу неизменным, пока продольный регулятор не выдаст измененный сигнал регулирующего воздействия.
В простом выполнении продольный регулятор подключен к вспомогательному напряжению, которое отнесено к массе. При этом является предпочтительным, если вспомогательное напряжение приложено к вспомогательному источнику питания, который размещен последовательно с питающим напряжением. Таким способом питающее напряжение совместно используется для питания продольного регулятора, чтобы для сигнала регулирующего воздействия достичь более высокого уровня, чем питающее напряжение. Такой более высокий уровень требуется для управления полупроводниковым исполнительным элементом.
Для формирования сигнала измерения тока предпочтительным образом предусмотрен усилитель тока, который подключен к вспомогательному напряжению и который соединен с измерительными точками перед и после подключенного после полупроводникового исполнительного элемента шунтирующего сопротивления. Шунтирующее сопротивление создает простую возможность выполнить точное и быстрое по реакции измерение тока, которое не зависит от внешних фактов, таких как температура окружающей среды.
Полупроводниковый исполнительный элемент изменяет свое проходное сопротивление в зависимости от сигнала измерения тока, приложенного к управляющему выводу. Предпочтительным при этом является использование простых компонентов, таких как обычные биполярные транзисторы, полевые транзисторы (например, MOS-FET - полевой транзистор со структурой металл - оксид - полупроводник) или биполярный транзистор с изолированным затвором (IGBT).
Особенно предпочтительным является, если предусмотрено несколько продольных ветвей, которые подключены к питающему напряжению и имеют общее вспомогательное напряжение для питания соответствующих продольных регуляторов. За счет общего отнесения сигналов измерения тока и опорных сигналов к массе больше не требуется снабжать каждый продольный регулятор собственным вспомогательным напряжением.
Соответствующий изобретению способ регулирования тока предусматривает, что на продольный регулятор подается сигнал измерения тока и опорный сигнал, и в зависимости от разности между этими обоими сигналами формируется регулирующее воздействие, причем на регулируемый ток воздействует изменение сопротивления полупроводникового исполнительного элемента, размещенного между питающим напряжением и выходным напряжением. Кроме того, опорный сигнал и сигнал измерения тока отнесены к массе, и регулирующее воздействие корректируется посредством формирователя разности таким образом, что разность между питающим напряжением и выходным напряжением вычитается из регулирующего воздействия.
Формирование скорректированного регулирующего воздействия происходит при этом практически без задержки, благодаря чему и при быстром изменении выходного напряжения или питающего напряжения контур регулирования поддерживается стабильным, если на основе отнесения сигнала измерения тока и опорного сигнала к массе проявляется положительная обратная связь импеданса проводника в продольной ветви.
Изобретение поясняется далее на примерах со ссылками на приложенные чертежи, на которых в схематичном представлении показано следующее:
Фиг.1 - система регулирования тока с продольным регулятором согласно уровню техники,
Фиг.2 - система регулирования тока с соответствующей изобретению коррекцией регулирующего воздействия,
Фиг.3 - система регулирования тока с двумя продольными ветвями.
В представленной на фиг.1 известной системе регулирования тока предусмотрен источник постоянного тока DC, который одним выводом подключен к массе, а к другому выводу которого приложено питающее напряжение Uin. Параллельно источнику постоянного тока размещен конденсатор Cin для сглаживания напряжения.
К питающему напряжению Uin подключен полупроводниковый исполнительный элемент 2, причем проводник между источником постоянного тока DC и полупроводниковым исполнительным элементом 2 имеет импеданс ZL. Полупроводниковый исполнительный элемент 2 выполнен, например, как нормально запертый n-канальный MOS-FET с выводом затвора G, выводом стока D и выводом истока S. Вывод истока S соединен при этом через паразитный диод с выводом стока D. В этом случае вывод стока подключен к питающему напряжению Uin.
К выводу затвора G приложен сигнал регулирующего воздействия линейного регулятора 1. Вывод истока S соединен с выходом, к которому приложено выходное напряжение Uout и к которому подключен один вывод нагрузки 4. Второй вывод нагрузки 4 соединен с массой. Между выводом истока S и выходом размещено шунтирующее сопротивление RSh для измерения тока.
Перед и после шунтирующего сопротивления RSh контактные точки соединены с входами усилителя 3 тока. Усилитель 3 тока выдает на своем выходе сигнал измерения тока, который подается на продольный регулятор 1. Усилитель 3 тока и продольный регулятор 1 получают питание посредством вспомогательного напряжения UH, которое отнесено к выходному напряжению Uout.
На линейный регулятор 1 подается опорный сигнал для задания заданного значения тока Isoll, причем этот опорный сигнал также отнесен к выходному напряжению Uout.
Полупроводниковый исполнительный элемент 2 в режиме работы без помех является автономно проводящим, так что выходное напряжение Uout, если пренебречь потерями в компонентах и проводниках, примерно соответствует питающему напряжению Uin. При этом сигнал регулирующего воздействия лежит ниже порогового напряжения полупроводникового исполнительного элемента 2.
Если вследствие помехи ток повышается выше заданного значения тока Isoll, то начинает работать регулятор. Сигнал регулирующего воздействия повышается выше порогового напряжения полупроводникового исполнительного элемента 2, так что проходное сопротивление от вывода стока к выводу истока полупроводникового исполнительного элемента повышается. Само собой разумеется, что максимальная допустимая длительность подобного ограничения тока зависит от термических условий. Обычно возможно таким образом регулировать ток за несколько секунд до заданного значения, прежде чем полупроводниковый исполнительный элемент 2 будет поврежден.
Для того чтобы снабжать энергией несколько параллельно расположенных продольных ветвей посредством вспомогательного напряжения, является желательным вспомогательное напряжение, а также отдельные опорные сигналы и сигналы измерения тока отнести к общей массе. Тем самым, хотя достигается желательная независимость от, как правило, разных по величине выходных напряжений отдельных продольных ветвей, однако в общем случае изменение выходного напряжения в продольной ветви обуславливает из-за импеданса ZL проводника положительную обратную связь в контуре регулирования.
Если, например, при скачке нагрузки выходное напряжение или напряжение на выводе истока соответствующего полупроводникового исполнительного элемента падает, то за счет этого напряжение между выводом затвора и выводом истока вынужденным образом повышается, потому что отнесенный к массе сигнал регулирующего воздействия вследствие импеданса ZL проводника снижается не синхронно с выходным напряжением. Эта положительная обратная связь приводит к неустойчивому контуру регулирования и обуславливает продолжительное колебание тока.
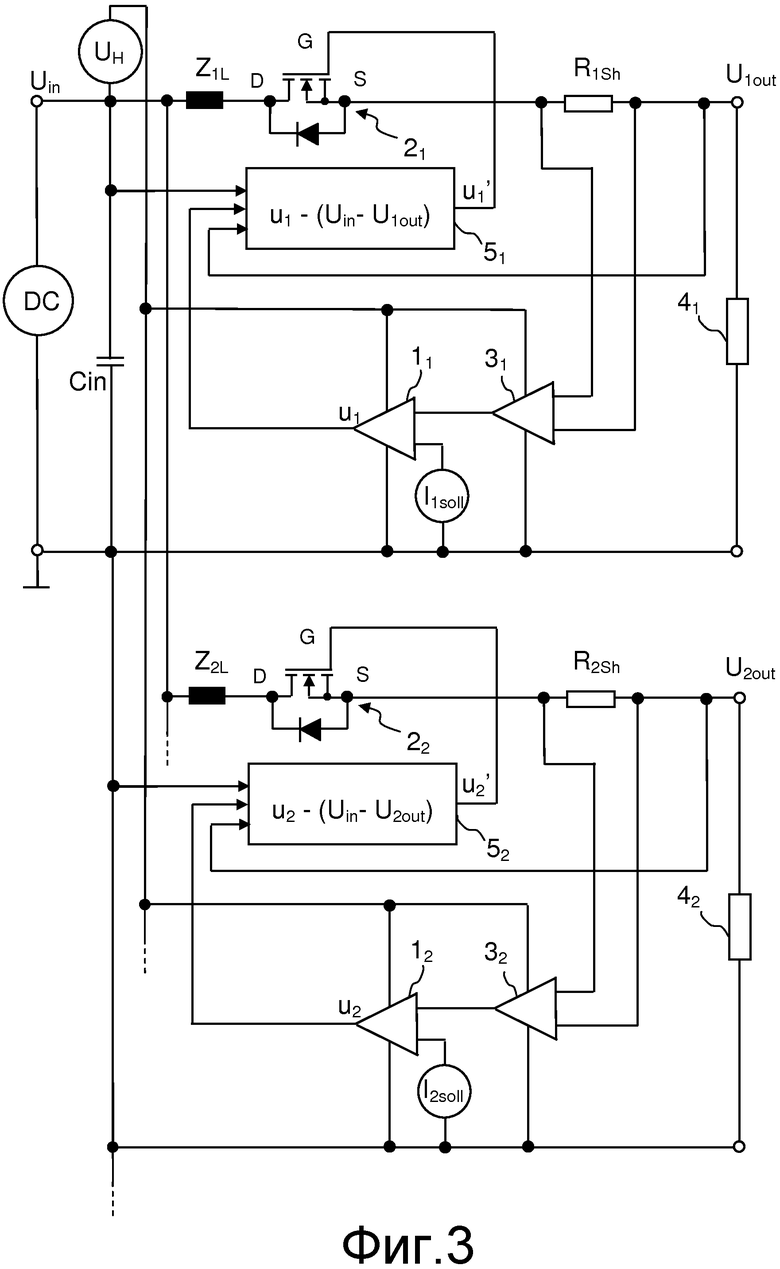
Чтобы исключить влияние положительной обратной связи в контуре регулирования, в соответствии с изобретением предпринимается коррекция регулирующего воздействия. Соответствующее устройство показано на фиг.2.
Основная схема состоит из продольного контура, причем нагрузка 4 через вспомогательный схемный элемент 2 подключена к питающему напряжению Uin. Контур тока замыкается через массу в качестве общего опорного потенциала питающего напряжения Uin и создаваемого на нагрузке 4 выходного напряжения Uout.
Вспомогательный схемный элемент 2, как на фиг.1, выполнен в виде MOS-FET, причем вывод стока D соединен с питающим напряжением Uin, а вывод истока S - с выходом, к которому приложено выходное напряжение Uout. При этом между выводом истока S и выходом размещено шунтирующее сопротивление RSh. Контактные точки перед и после шунтирующего сопротивления соединены с входами усилителя 3 тока. Подключенный к массе усилитель 3 тока получает питание от вспомогательного напряжения, которое приложено к вспомогательному источнику питания UH, размещенному последовательно с питающим напряжением. Сигнал измерения тока на выходе усилителя 3 тока отнесен, как и вспомогательное напряжение, к массе в качестве общего опорного потенциала питающего напряжения Uin и создаваемого на нагрузке 4 выходного напряжения Uout.
На продольный регулятор 1, который, как усилитель 3 тока, получает питание с помощью вспомогательного напряжения, подаются со стороны входа сигнал измерения тока и опорный сигнал. Опорный сигнал отнесен, как и сигнал измерения тока, к массе и задает заданное значение тока Isoll. Таким образом, на выходе продольного регулятора 1 приложен отнесенный к массе сигнал u регулирующего воздействия, который подается на формирователь 5 разности. Формирователь 5 разности к тому же связан с питающим напряжением Uin и выходным напряжением Uout и формирует скорректированный сигнал u' регулирующего воздействия согласно следующему соотношению:
u' = u - (Uin - Uout)
В соответствии с изобретением, вывод затвора G полупроводникового исполнительного элемента 2 нагружается этим скорректированным сигналом u' регулирующего воздействия.
Формирователь 5 разности предпочтительно выполнен как простая аналоговая схема, так что осуществляется коррекция практически без задержки сигнала u регулирующего воздействия, как только возникает изменение выходного напряжения Uout или питающего напряжения Uin. В каждом случае осуществляется коррекция многократно быстрее, чем настройка сигнала u регулирующего воздействия посредством продольного регулятора 1.
Положительная обратная связь за счет импеданса ZL также предотвращается за счет немедленной коррекции сигнала u регулирующего воздействия. При этом коррекция соответствует вызванной импедансом ZL разности питающего напряжения Uin и выходного напряжения Uout, за счет чего напряжение между выводами затвора и истока полупроводникового исполнительного элемента 2 по существу остается неизменным, пока продольный регулятор 1 не задаст измененный сигнал u регулирующего воздействия. Контур регулирования, таким образом, является устойчивым, и не происходят никакие колебания тока.
На фиг.3 показаны две продольные ветви с различными выходными напряжениями U1out и U2out. Продольные контура получают питание от общего питающего напряжения Uin, с которым последовательно включен вспомогательный источник питания UH. Каждый продольный контур содержит собственный полупроводниковый исполнительный элемент 21 и 22, который ограничивает ток, в случае короткого замыкания соответствующей подключенной нагрузки 41 или 42 или в случае кратковременной перегрузки, до заданного значения тока I1soll или I2soll. Для измерения тока каждая продольная ветвь содержит собственное шунтирующее сопротивление R1Sh, или R2Sh.
Каждый полупроводниковый исполнительный элемент 21 или 22 управляется посредством скорректированного сигнала u1' или u2' регулирующего воздействия, который приложен к выходу соответствующего формирователя 51 или 52 разности. Соответствующий формирователь 51 или 52 разности корректирует выдаваемый соответствующим продольным регулятором 11 или 12 сигнал u1 или u2 регулирующего воздействия согласно соответствующему возникающему в продольной ветви импедансу Z1L или Z2L.
Вследствие того, что все сигналы измерения тока, опорные сигналы и сигналы u1 или u2 регулирующего воздействия отнесены к общей массе, при нескольких параллельно включенных продольных ветвях требуется только одно единственное вспомогательное напряжение, к которому подключены все продольные регуляторы 11, 12 и усилители 31, 32 тока. При этом понятно, что таким способом могут быть параллельно включены более чем две показанные на фиг.3 продольные ветви.
Группа изобретений относится к средствам регулирования тока. Технический результат заключается в повышении надежности и точности системы регулирования тока. Для этого предложена система регулирования тока, которая содержит по меньшей мере одну продольную ветвь с линейным продольным регулятором (1, 11, 12) для формирования сигнала (u, u1, u2) регулирующего воздействия, причем продольный регулятор (1, 11, 12) соединен с полупроводниковым исполнительным элементом (2, 21, 22), который подключен к питающему напряжению (Uin), отнесенному к массе, и к которому на выходной стороне приложено выходное напряжение (Uout). При этом поданный на продольный регулятор (1, 11, 12) опорный сигнал, сигнал измерения тока и сигнал (u, u1, u2) регулирующего воздействия отнесены к массе, причем сигнал (u, u1, u2) регулирующего воздействия подается на формирователь (5, 51, 52) разности, который из сигнала (u, u1, u2) регулирующего воздействия вычитает разность питающего напряжения (Uin) и выходного напряжения (Uout, U1out, U2out), и причем сформированный таким образом выходной сигнал формирователя (5, 51, 52) разности подается на полупроводниковый исполнительный элемент (2, 21, 22) как скорректированный сигнал (u′, u′1, u′2) регулирующего воздействия. 2 н. и 8 з.п. ф-лы, 3 ил.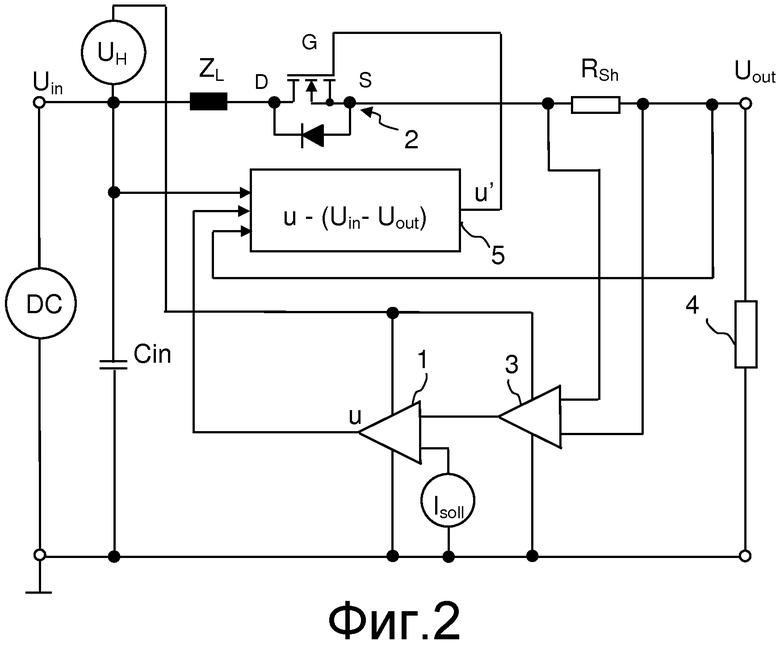
1. Система регулирования тока, которая содержит по меньшей мере одну продольную ветвь с линейным продольным регулятором (1, 11, 12) для формирования сигнала (u, u1, u2) регулирующего воздействия, причем продольный регулятор (1, 11, 12) соединен с полупроводниковым исполнительным элементом (2, 21, 22), который подключен к питающему напряжению (Uin), отнесенному к массе, и к которому на выходной стороне приложено отнесенное к массе выходное напряжение (Uout, U1out, U2out), отличающаяся тем, что поданный на продольный регулятор (1, 11, 12) опорный сигнал, сигнал измерения тока и сигнал (u, u1, u2) регулирующего воздействия отнесены к массе, что сигнал (u, u1, u2) регулирующего воздействия подается на формирователь (5, 51, 52) разности, который из сигнала (u, u1, u2) регулирующего воздействия вычитает разность питающего напряжения (Uin) и выходного напряжения (Uout, U1out, U2out), и что сформированный таким образом выходной сигнал формирователя (5, 51, 52) разности подается на полупроводниковый исполнительный элемент (2, 21, 22) как скорректированный сигнал (u′, u′1, u′2) регулирующего воздействия.
2. Система регулирования тока по п.1, отличающаяся тем, что продольный регулятор (1, 11, 12) подключен к вспомогательному напряжению, которое отнесено к массе.
3. Система регулирования тока по п.2, отличающаяся тем, что вспомогательное напряжение приложено к вспомогательному источнику питания (UH), который размещен последовательно с питающим напряжением (Uin).
4. Система регулирования тока по любому из пп.1-3, отличающаяся тем, что для формирования сигнала измерения тока предусмотрен усилитель (3, 31, 32) тока, который подключен к вспомогательному напряжению и который соединен с измерительными точками перед и после подключенного после полупроводникового исполнительного элемента (2, 21, 22) шунтирующего сопротивления (RSh, R1Sh, R2Sh).
5. Система регулирования тока по любому из пп.1-3, отличающаяся тем, что в качестве полупроводникового исполнительного элемента (2, 21, 22) предусмотрен биполярный транзистор, полевой транзистор или биполярный транзистор с изолированным затвором.
6. Система регулирования тока по п.4, отличающаяся тем, что в качестве полупроводникового исполнительного элемента (2, 21, 22) предусмотрен биполярный транзистор, полевой транзистор или биполярный транзистор с изолированным затвором.
7. Система регулирования тока по любому из пп.2, 3, 6, отличающаяся тем, что предусмотрено несколько продольных ветвей, которые подключены к питающему напряжению (Uin) и имеют общее вспомогательное напряжение для питания соответствующих продольных регуляторов (11, 12).
8. Система регулирования тока по п.4, отличающаяся тем, что предусмотрено несколько продольных ветвей, которые подключены к питающему напряжению (Uin) и имеют общее вспомогательное напряжение для питания соответствующих продольных регуляторов (11, 12).
9. Система регулирования тока по п.5, отличающаяся тем, что предусмотрено несколько продольных ветвей, которые подключены к питающему напряжению (Uin) и имеют общее вспомогательное напряжение для питания соответствующих продольных регуляторов (11, 12).
10. Способ регулирования тока, при котором на линейный продольный регулятор (1, 11, 12) подается сигнал измерения тока и опорный сигнал, и в зависимости от разности между этими обоими сигналами формируется регулирующее воздействие, причем на регулируемый ток воздействует изменение сопротивления полупроводникового исполнительного элемента (2, 21, 22), размещенного между питающим напряжением (Uin) и выходным напряжением (Uout, U1out, U2out), отличающийся тем, что опорный сигнал и сигнал измерения тока отнесены к массе, и регулирующее воздействие корректируется посредством формирователя (5, 51, 52) разности таким образом, что разность между питающим напряжением (Uin) и выходным напряжением (Uout, U1out, U2out) вычитается из регулирующего воздействия.
| US 6177783 В1, 23.01.2001 | |||
| WO 2002082611 А2, 17.10.2002 | |||
| US 20060267562 А1, 30.11.2006 | |||
| Устройство автоматического регулирования напряжения (тока) | 1986 |
|
SU1529190A1 |

