Изобретение относится к гидроавиации, в частности к самолетам-амфибиям (СА). Предназначено для автоматических систем управления посадкой на водную поверхность и взлетом с нее, приводящих в действие поверхности управления в зависимости от уровня гидродинамического воздействия среды на днище лодки и высоты движения СА.
Применение таких систем, как показано в материалах патента РФ №2268157 (МПК B60F 3/00, B64C 35/00, B64C 13/16) «Система управления углом тангажа СА при движении по воде в режиме глиссирования», способствует исключению из практики управления движением СА ситуаций, связанных с отказами или с «человеческим фактором» при глиссировании по водной поверхности, когда СА может выйти на углы хода, близкие к граничным.
Таким образом, преимущественной областью использования изобретения являются существующие и вновь создаваемые авиационные системы автоматического управления движением СА.
Известны способы, направленные на повышение уровня автоматизации процессов управления движением летательных аппаратов, с целью исключения из практики управления их движением ситуаций, связанных с отказами или с «человеческим фактором». Эти способы заключаются в получении из внешней среды данных, их обработке и последующей передаче сигналов в контур управления движением СА.
К ним может быть отнесена «Система раннего измерения турбулентности перед летательным аппаратом» по патенту РФ №2373554 (МПК G01S 17/95). Изобретение относится к системе раннего измерения турбулентности перед летательным аппаратом. Техническим результатом изобретения является измерение скорости ветра впереди летательного аппарата на расстоянии, достаточном для того, чтобы успеть привести в действие поверхности управления летательного аппарата с опережением по времени. Поэтому для определения моментов перехода СА из воздушной среды в водную и наоборот система использоваться не может.
На основе емкостного датчика сверхмалых высот полета гидросамолета, описанного в патенте РФ №2196077 (МПК B64D 43/00, G01F 23/26) и отнесенного авторами к области авиационного приборостроения, также можно реализовать способ определения моментов перехода из водной среды в воздушную и из воздушной в водную с целью приведения в действие поверхностей управления при обеспечении посадки на водную поверхность и при отрыве от нее при взлете. К причинам, препятствующим достижению указанного ниже результата при использовании известного способа, относится то, что в известном способе показания датчика существенно зависят от условий внешней среды, в частности, от влажности воздуха.
Наиболее близким способом того же назначения к заявляемому изобретению по максимальному количеству сходных признаков является техническое решение, основанное на способе оценки электропроводности среды и принятия решения о том, какой из сред соответствует измеренная электропроводность. Данное решение, описанное в патенте США №7350751 (МПК B64C 25/54) «Шасси с системой противодействия переворачиванию самолета при посадке на воду» и заключающееся в осуществлении непосредственного контакта с окружающей средой и регистрации изменения среды по результатам оценки ее свойств при переходе из воздушной среды в водную и наоборот, принято за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании прототипа, относится то, что в известном способе используется свойство среды - электропроводность, которое может изменяться в широких пределах в зависимости не только от окружающей среды (вода или воздух), но и от содержания (или отсутствия) в воде различных примесей (невозможность правильной идентификации среды при работе в водоемах с пресной водой, например, на озере Байкал) ее агрегатного состояния (обледенение). Следствием этого является большая вероятность принятия неправильного решения о нахождении (или ненахождении) днища лодки СА в водной среде.
В результате известное техническое решение не может быть использовано в автоматических системах управления СА, предназначенных для приведения в действие поверхностей управления при обеспечении посадки на водную поверхность и при отрыве от нее при взлете.
В основу изобретения положена задача, заключающаяся в создании способа сигнализации приводнения и взлета с водной поверхности СА, лишенного вышеизложенных недостатков, в котором обеспечивается повышение достоверности сигнализации момента касания днищем лодки СА водной поверхности при переходе из воздушной среды в водную, отрыва днища лодки от водной поверхности при взлете с воды, а также нахождения на плаву и в воздухе.
Указанный технический результат достигается тем, что в известном способе, примененном в изобретении «Шасси с системой противодействия переворачиванию самолета при посадке на воду» по патенту США №7350751, в котором путем непосредственного контакта с окружающей средой и регистрации ее изменения по результатам оценки свойств среды при переходе из воздушной среды в водную и наоборот, измеряют и сравнивают высоту перемещения СА с верхним и нижним порогами заданного диапазона высот и гидродинамическое воздействие среды на днище лодки СА с заданным порогом вибраций, причем если значение измеренной высоты находится между нижним и верхним порогами, то при значении гидродинамического воздействия выше порога вибраций принимается решение «Вода», при значении гидродинамического воздействия ниже порога вибраций - решение «Воздух», и независимо от значения гидродинамического воздействия при значении измеренной высоты выше верхнего порога принимается решение «Воздух», а при значении высоты ниже нижнего порога - решение «Вода».
Благодаря введению в известный способ совокупности существенных отличительных признаков, предлагаемый способ обеспечивает повышение достоверности сигнализации момента касания днищем лодки СА водной поверхности при переходе из воздушной среды в водную, отрыва днища лодки СА от водной поверхности при взлете с воды, а также нахождения на плаву и в воздухе.
Сущность предлагаемого способа поясняется на чертеже, где:
1 - радиовысотомер;
2 - датчик вибраций;
3 - блок цифровой обработки сигналов.
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии, в котором путем непосредственного контакта с окружающей средой и регистрации ее изменения по результатам оценки свойств среды при переходе из воздушной среды в водную и наоборот измеряют и сравнивают высоту перемещения СА с верхним и нижним порогами заданного диапазона высот и гидродинамическое воздействие среды на днище лодки СА с заданным порогом вибраций, причем если значение измеренной высоты находится между нижним и верхним порогами, то при значении гидродинамического воздействия выше порога вибраций принимается решение «Вода», при значении гидродинамического воздействия ниже порога вибраций - решение «Воздух», и независимо от значения гидродинамического воздействия при значении измеренной высоты выше верхнего порога принимается решение «Воздух», а при значении высоты ниже нижнего порога - решение «Вода», осуществляется следующим образом.
Сигналы с выходов радиовысотомера 1 и датчика вибраций 2 одновременно поступают на соответствующие входы блока цифровой обработки сигналов 3. В блоке цифровой обработки сигналов 3 сигналы, поступающие с выходов радиовысотомера 1 и датчика вибраций 2, одновременно преобразуются в цифровые отсчеты. После цифровой обработки в блоке 3 формируются сигналы принятия решений «Воздух» или «Вода», поступающие на выход блока цифровой обработки сигнала 3, откуда они могут быть переданы во внешние устройства.
Для сигнала, поступающего с выхода радиовысотомера 1, пропорционального высоте перемещения (ВП) СА и обозначаемого в дальнейшем как UВП, в блоке цифровой обработки сигналов 3 осуществляется вычисление математического ожидания (МО) по формуле:

где К=ТВП·FВП - количество отсчетов на интервале вычисления UВП МО;
i - номер отсчета UВП;

TВП - временной интервал для вычисления UВП МО;
FВП - частота следования отсчетов UВП.
Для сигнала, поступающего с выхода датчика вибраций 2, пропорционального уровню гидродинамического воздействия (ГДВ) на днище лодки СА на участке от предреданной части до кормы и обозначаемого в дальнейшем как UГДВ, в блоке цифровой обработки сигналов 3 осуществляется вычисление среднего квадратического отклонения (СКО) напряжения UГДВ СКО по формуле:

где
N=TГДВ·FГДВ - количество отсчетов на интервале вычисления UГДВ СКО;
i - номер отсчета UГДВ;
UГДВ - i-й отсчет сигнала датчика вибраций ГДВ;
UГДВ МО - математическое ожидание сигнала, поступающего с выхода радиовысотомера 1, рассчитываемое по формуле:

В блоке цифровой обработки сигналов 3 вычисленное значение UГДВ СКО сравнивается с установленным заранее пороговым значением напряжения вибраций 


Без учета погрешности показаний радиовысотомера значение высоты СА, находящегося на взлетно-посадочной полосе с выпущенным в нормальное положение шасси, принимается равным 0 м.
Когда шасси убраны и днище СА касается невзволнованной водной поверхности, показания радиовысотомера для СА, например, Бе-200 оказываются равными примерно минус 1 м; при скорости перемещения по воде менее 60 км/ч показания радиовысотомера, в зависимости от запаса топлива на борту СА и др. полезной нагрузки, могут достигать минус 2 м.
Тогда для принятия решения о том, что днище лодки СА «уверенно» находится в водной среде, 
Для принятия решения о том, что днище лодки СА «уверенно» уже находится в воздушной среде при взлете или еще находится в воздушной среде при посадке, введен порог 


Способ характеризуется использованием таких общеизвестных средств, как датчик вибраций и радиовысотомер.
Отсчеты напряжений UВП и UГДВ, снимаемых с радиовысотомера 1 и датчика вибраций 2 соответственно, поступают в блок цифровой обработки сигналов 3.
В блоке цифровой обработки сигналов 3 на скользящих временных интервалах длительностью Тнабл.ГДВ и Тнабл.ВП одновременно производятся вычисления по формулам (1), (2) и (3).
Результаты вычислений по формулам (1) и (2) в блоке цифровой обработки сигналов 3 одновременно сравниваются с установленными заранее значениями напряжений, соответствующими заданным высотам перемещения СА
При совпадении условий 

При совпадении условий 

Решения «Воздух» и «Вода» поступают на выход блока цифровой обработки сигналов 3 для передачи их во внешние устройства для индикации принятого решения и в автоматические системы управления посадкой на водную поверхность и взлета с нее.
Использование каждой из упомянутых выше математических операций трудностей реализации не вызывает и в отдельности известно. Однако установленная новая совокупность этих операций и порядок их выполнения являются причиной получения нового технического результата.
Преимущество изобретения состоит в том, что обеспечивается повышение достоверности сигнализации моментов касания днищем лодки СА водной поверхности при переходе из воздушной среды в водную и отрыва днища лодки от водной поверхности при взлете с воды, а также нахождения на плаву и в воздухе. В результате повышения достоверности упомянутой сигнализации повышается эффективность использования демпфера тангажа с оптимизированным для гашения гидродинамических моментов законом управления, предназначенного для борьбы с продольными колебаниями СА при движении в контакте с водной поверхностью. Такой демпфер включен в систему управления аэродинамического руля высоты СА Бе-200; он работает в режиме минимизации угловой скорости тангажа при движении СА по волне в режиме глиссирования и снижает влияние ошибок пилотирования на режимах глиссирования. При этом за счет уменьшения раскачки СА повышается мореходность, т.е. появляется возможность эксплуатации СА при большей высоте волн, что отмечено в материалах патента РФ №2268157 (МПК B60F 3/00, B64C 35/00, B64C 13/16) «Система управления углом тангажа самолета-амфибии при движении по воде в режиме глиссирования».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИГНАЛИЗАЦИИ ПРИВОДНЕНИЯ И ВЗЛЕТА С ВОДНОЙ ПОВЕРХНОСТИ САМОЛЕТА-АМФИБИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2611466C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ - АМФИБИЯ | 2017 |
|
RU2661379C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛЬНОЙ ИНДИКАЦИИ СКОРОСТИ ПРОТИВОПОЖАРНОГО САМОЛЁТА-АМФИБИИ ПРИ ЗАБОРЕ ВОДЫ НА ГЛИССИРОВАНИИ ПО ВОДНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2541613C2 |
| САМОЛЕТ-АМФИБИЯ | 2004 |
|
RU2272752C1 |
| СПЕЦИАЛЬНАЯ СИСТЕМА ПОЖАРНОГО ОБОРУДОВАНИЯ САМОЛЁТОВ-АМФИБИЙ, НАБИРАЮЩИХ ВОДУ ИЗ ВОДОЁМОВ НА РЕЖИМАХ ГЛИССИРОВАНИЯ | 2020 |
|
RU2755548C1 |
| Транспортный самолет-амфибия | 2020 |
|
RU2732523C1 |
| САМОЛЕТ-АМФИБИЯ | 1997 |
|
RU2135394C1 |
| ЛЕГКИЙ САМОЛЕТ-АМФИБИЯ | 2006 |
|
RU2328413C1 |
| ГИДРОСАМОЛЕТ | 2001 |
|
RU2223200C2 |
| САМОЛЕТ-АМФИБИЯ (ГИДРОСАМОЛЕТ) С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2016 |
|
RU2641359C1 |
Изобретение относится к гидроавиации, в частности к самолетам-амфибиям, и предназначено для использования в автоматических системах управления посадкой и взлетом с водной поверхности самолетов-амфибий. Согласно предложенному способу измеряют и сравнивают высоту перемещения самолета-амфибии с верхним и нижним порогами заданного диапазона высот и гидродинамическое воздействие среды на днище лодки самолета-амфибии с заданным порогом вибраций. Если значение измеренной высоты находится между нижним и верхним порогами, то при значении гидродинамического воздействия выше порога вибраций принимается решение «Вода», при значении гидродинамического воздействия ниже порога вибраций - решение «Воздух». Независимо от значения гидродинамического воздействия при значении измеренной высоты выше верхнего порога принимается решение «Воздух», а при значении высоты ниже нижнего порога - решение «Вода». Изобретение повышает достоверность сигнализации моментов касания днищем лодки самолета-амфибии водной поверхности при переходе из воздушной среды в водную и отрыва днища лодки самолета-амфибии от водной поверхности при взлете, а также нахождения на плаву и в воздухе. 1 ил.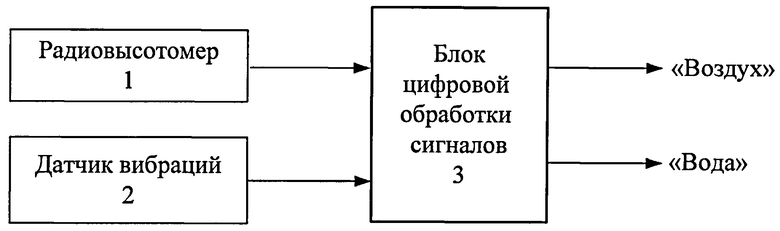
Способ сигнализации приводнения и взлета с водной поверхности самолета-амфибии, основанный на непосредственном контакте с окружающей средой и регистрации ее изменения по результатам оценки свойств среды при переходе из воздушной среды в водную, и наоборот, отличающийся тем, что измеряют и сравнивают высоту перемещения самолета-амфибии с верхним и нижним порогами заданного диапазона высот и гидродинамическое воздействие среды на днище лодки самолета-амфибии с заданным порогом вибраций, причем если значение измеренной высоты находится между нижним и верхним порогами, то при значении гидродинамического воздействия выше порога вибраций принимается решение «Вода», при значении гидродинамического воздействия ниже порога вибраций - решение «Воздух» и независимо от значения гидродинамического воздействия при значении измеренной высоты выше верхнего порога принимается решение «Воздух», а при значении высоты ниже нижнего порога - решение «Вода».
| СПОСОБ ЗВУКОВОЙ ИНДИКАЦИИ ПАРАМЕТРОВ ПРЕДПОСАДОЧНОГО СНИЖЕНИЯ ГИДРОСАМОЛЕТА ИЛИ САМОЛЕТА ДЛЯ ОБЕСПЕЧЕНИЯ ПОСАДКИ В УСЛОВИЯХ ПЛОХОЙ ВИДИМОСТИ | 1998 |
|
RU2154596C2 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА, ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1999 |
|
RU2183010C2 |
| МАЯТНИКОВАЯ ПИЛА | 1928 |
|
SU9653A1 |
| JP 11295066 A, 29.10.1999 | |||
| JP 2008203123 A, 04.09.2008. | |||

