Изобретение относится к области авиационной техники, а именно к средствам отображения информации экипажу противопожарных самолетов-амфибий.
Главной отличительной особенностью противопожарных самолетов-амфибий по сравнению с сухопутными противопожарными самолетами является способность забирать воду на глиссировании по водной поверхности во внутренние водяные баки с помощью специальных водозаборных устройств (водозаборников). При этом на заполнение водяных баков уходит меньше минуты. Это значительно повышает производительность и эффективность противопожарных самолетов-амфибий по сравнению с сухопутными противопожарными самолетами, которым для заправки водой требуется полный цикл посадки и взлета, включая полную остановку, заруливание и собственно заправку, на что уходят десятки минут.
Процесс забора воды на глиссировании делится на три этапа.
Первый этап - заход на посадку и приводнение.
Второй этап - непосредственно забор воды на глиссировании по водной поверхности.
Третий этап - взлет и набор высоты.
Первый и третий этапы не отличаются от захода на посадку на воду и от взлета с водной поверхности соответственно. Второй этап имеет ряд особенностей и только отчасти похож на заключительную фазу разбега самолета-амфибии по воде перед взлетом. По объему переработки информации в единицу времени (считывание данных, принятие и исполнение решений) забор воды на глиссировании по водной поверхности следует отнести к наиболее напряженным режимам работы экипажа противопожарного самолета-амфибии. Наилучший (наименее напряженный для пилотов) вариант забора воды на глиссировании:
- касание воды производится с уже выпущенными водозаборными устройствами (ВЗУ), что минимизирует вероятность «рикошета», т.к. тормозная сила на ВЗУ резко снижает скорость движения самолета, а также создает пикирующий момент (уменьшает угол атаки) в момент касания;
- убедившись в устойчивом контакте с водой, пилот переводит РУД на повышенный режим: на гладкой воде это обычно взлетный режим двигателей, а при существенном волнении потребный режим ниже из-за пониженной тормозной силы на ВЗУ (ковши периодически выходят из воды и не создают сопротивления);
- пилот следит за заполнением баков и выдерживает рекомендованную скорость забора, растущую соразмерно увеличивающемуся весу самолета;
- к моменту окончания забора (баки заполнены) скорость самолета близка к скорости отрыва - пилот убирает ВЗУ, добавляет тягу (если режим двигателей был ниже взлетного);
- самолет разгоняется до скорости отрыва и взлетает.
Однако такой простой алгоритм действий не всегда позволяет выполнить забор воды с рекомендуемыми параметрами скоростного режима. В начальной фазе после касания высока вероятность уменьшения скорости ниже минимальной (минимально допустимой) скорости забора воды, т.к. есть разброс значений скорости в момент касания, неодинаков интервал времени от момента касания до перевода пилотом РУД на взлетный режим (пилоту необходимо убедиться в устойчивом контакте с водой) и т.п. При тенденции к падению скорости ниже минимальной летчик должен на время убрать ВЗУ, а затем, дождавшись нужного скоростного режима и принимая в расчет временную задержку между нажатием курка выпуска ВЗУ и выходом ковшей ВЗУ, снова выпустить их. Возможна обратная ситуация, когда тяга двигателей избыточна и самолет может выйти на скорость отрыва до того, как водяные баки будут заполнены. Обычно так бывает при заборе воды на волне. В этом случае летчик должен, с учетом приемистости, вовремя подобрать пониженный режим работы двигателей, чтобы успешно завершить заполнение баков.
Контроль скоростного режима при заборе воды осложняется тем, что масса самолета постоянно меняется, а диапазон рекомендуемых скоростей зависит от массы. Кроме того, считывание значений скорости самолета с обычных индикаторов при движении по воде затруднено из-за переменных перегрузок и вибраций в кабине.
В случае внезапного отказа двигателя в процессе забора воды на скорости ниже минимальной летчик должен выполнить действия для остановки самолета. Если отказ распознан на скорости выше минимальной, пилоту необходимо парировать боковой увод с помощью аэродинамических рулей, убрать водозаборники для уменьшения гидродинамического сопротивления и сохранения положительного ускорения противопожарного самолета-амфибии на одном двигателе, разогнать самолет до скорости отрыва, осуществить взлет, на высоте 1-2 м произвести аварийный сброс набранной воды и продолжить набор высоты.
Нижняя граница диапазона рекомендуемых скоростей во время заборы воды (минимальная скорость на заборе воды VMINWT) устанавливается из условия возможности в случае внезапного отказа критического двигателя осуществить продолженный взлет противопожарного самолета-амфибии в пределах располагаемой дистанции. Минимальная скорость на заборе воды VMINWT является аналогом скорости принятия решения V1 при взлете самолета и зависит от веса самолета и атмосферных условий. В случае распознавания отказа двигателя на скорости ниже минимальной взлет должен быть прекращен. Так как забор воды производится чаще всего на необорудованных акваториях, где оставлять самолет после отказа двигателя нежелательно, то для того, чтобы снизить вероятность прекращения взлета, рекомендуется при заборе воды выдерживать скорость выше VMINWT. Минимальная скорость VMINWT назначается производителем самолета, подтверждается в летных испытаниях и одобряется авиационными властями
Верхняя граница диапазона рекомендуемых скоростей - скорость отрыва (Vотр). На этой скорости при рекомендованном угле хода (тангажа) и соответствующем ему угле атаки самолет с данным весом может выполнить безопасный отрыв от поверхности воды. В случае превышения этой скорости до окончания забора воды самолет может оторваться от водной поверхности с незаполненными баками. Продолжать забор воды на скоростях выше скорости отрыва, удерживая самолет от отрыва установкой малого угла тангажа, также нельзя из-за повышенных нагрузок на водозаборных устройствах и днище лодки противопожарного самолета амфибии при большой скорости движения по воде. Существуют эксплуатационные ограничения по минимальному углу хода (тангажа) и максимальной скорости с выпущенными водозаборниками. При выходе на скорости выше Vотр летчик должен убрать ВЗУ и выполнить взлет или уменьшить режим работы двигателей и снизить скорость.
В настоящее время сертификационные требования к гидросамолетам и противопожарным самолетам-амфибиям гражданской авиации формируются в России на основе Авиационных правил АП-23 или АП-25 (В Европе на основе CS-23 или CS-25, в США FAR-23 или FAR-25). В авиационных правилах пока отсутствуют требования к процедуре забора воды и соответственно отсутствуют требования к определению минимальной скорости забора воды. При сертификации противопожарного самолета-амфибии такие требования формируются с помощью специальных технических условий для каждого конкретного типа самолета. В существующей практике сертификации требуется, чтобы минимальная скорость забора воды на глиссировании VMINWT была такой, чтобы в случае внезапного отказа критического двигателя гарантировать взлет самолета с положительным градиентом набора высоты после отрыва. При этом для случая отказа одного двигателя в процессе забора воды нормируется величина располагаемого продольного ускорения противопожарного самолета-амфибии на глиссировании, величина располагаемого градиента набора высоты после взлета до набора высоты 1-2 м для аварийного сброса забранной воды и располагаемый градиент набора высоты после аварийного сброса забранной воды.
В настоящее время в сертификационных требованиях к противопожарным самолетам-амфибиям отсутствуют стандарты по сигнализации минимальной скорости забора воды. Соответственно нет типовых технических решений по сигнализации минимальной скорости забора воды. Так как минимальная скорость забора воды является фактически границей, определяющей возможность для противопожарного самолета-амфибии осуществить взлет с водоема после отказа одного двигателя в процессе забора воды на глиссировании, то соответствующая сигнализация является важной и существенно влияющей на безопасность процедуры забора воды. Если отказ одного двигателя происходит на скорости выше минимальной скорости забора воды, то дальнейший продолженный взлет возможен. Если отказ одного двигателя происходит на скорости ниже минимальной скорости забора воды, то дальнейший продолженный взлет невозможен.
Известен способ индикации скорости взлета самолета (United States Patent Number 6133857; авторы Wayne С / Millard, Carl W. Millard), представляющий собой визуальную индикацию, которая информирует пилота во время разбега при взлете об уровне скорости и ускорения самолета, достаточных чтобы гарантировать, что скорость V1 будет достигнута в ожидаемое время, а соответственно и дистанция разбега будет соответствовать ожидаемой, и если ускорение самолета недостаточное, то насколько текущая дистанция разбега самолета отстает от требуемого при разбеге графика ускорения.
При реализации индикации скорости взлета по указанному способу в виде индикатора воздушной скорости с круговой шкалой, во время разбега при взлете, одна стрелка сообщает пилоту текущую скорость разбега самолета, а другая дополнительная стрелка сообщает пилоту планируемую для данных условий скорость взлета.
Поскольку самолет ускоряется при разбеге для взлета, то стрелка текущей воздушной скорости будет двигаться вперед и вперед также будет продвигаться дополнительная стрелка скорости взлета. Когда обе стрелки соответственно равны, то есть одна накладывается на другую, тогда ускорение самолета соответствует планируемому (заданному). Если стрелка указателя текущей скорости опережает стрелку скорости взлета, тогда ускорение самолета лучше (больше) заданного. Если указатель текущей скорости отстает и находится позади указателя скорости взлета, то ускорение самолета меньше по величине требуемого (заданного) значения. Для информирования о дистанции окно на индикаторе скорости в цифровом виде показывает пилоту, как далеко по дистанции на взлетно-посадочной полосе самолет теперь находится позади плана разбега.
В силу большого разнообразия сочетаний факторов, влияющих на динамику процесса забора воды (см. выше), составить заранее оптимальную программу изменения скорости при заборе воды не представляется возможным, однако идея динамического сопоставления текущего и рекомендуемого скоростных режимов близка к предлагаемой. В способе индикации скорости взлета, описанном в приведенном выше изобретении, используется индикация текущей скорости самолета относительно требуемой, поэтому его можно принять в качестве аналога.
Известна характерная скорость самолета - скорость V1, которая является скоростью принятия решения на взлете, определяемая разработчиком самолета и одобряемая Авиационными властями (Airbus. Введение в летно-технические характеристики ВС.Р усская версия-Издание 1 - Октябрь 2007 http://dream-air.ru/new/pilotam/_.pdf) с.44). При отказе одного двигателя на взлете до достижения скорости V1 взлет должен быть прекращен. При отказе одного двигателя на взлете после достижения скорости V1 взлет должен быть продолжен. Так как взлетный вес самолета не изменяется во время разгона для взлета, то величина V1 является постоянной величиной для каждого взлета, в отличие от изменяющейся в процессе забора воды, как показано выше, величины минимальной скорости забора воды. Кроме того, при обычном взлете самолет всегда только разгоняется, т.е. имеет положительное ускорение, в отличие от процедуры забора воды на глиссировании, когда противопожарный самолет-амфибия после приводнения тормозится, а затем разгоняется. При этом в процессе забора воды, если пилот снижает режим работы двигателей для предупреждения преждевременного взлета самолета, возможно возникновение опять торможения.
На современных самолетах на этапе взлета применяется способ визуальной индикации скоростей V1, VR (скорость подъема носового колеса) и V2 (безопасная скорость набора высоты) в виде специальных планок (индексов) на шкале приборной скорости командно-пилотажного индикатора (Airbus. Введение в летно-технические характеристики ВС. Русская версия - Издание 1 - Октябрь 2007 http://dream-air.ru/new/pilotam/_.pdf), с.45). Наличие таких индексов позволяет летчику в процессе взлета визуально соотносить величину текущей скорости самолета с регламентированными граничными значениями, а достижение индекса V1 является критерием для принятия решения о продолжении взлета в случае отказа двигателя, поэтому данный способ индикации можно принять в качестве прототипа данного изобретения.
В отличие от движения по ВПП движение самолета-амфибии по воде, особенно при наличии волны, вызывает значительные знакопеременные перегрузки и вибрации в кабине. Кроме этого, при заборе воды на глиссировании информационная нагрузка на летчика очень высока. В этих условиях считывание информации с обычных индикаторов затруднено. Предлагаемое цветовое кодирование скоростного режима позволяет значительно упростить решение этой проблемы.
При обычном взлете скорость монотонно нарастает и летчик, как правило, не управляет темпом ее изменения, поэтому принятый в прототипе способ подачи информации адекватен задаче наблюдения и контроля. При заборе воды на глиссировании могут быть участки разгона и торможения, а летчик должен активно влиять на скорость, не допуская как чрезмерного падения скорости, так и преждевременного (до заполнения баков) достижения скорости отрыва. В силу того, что диапазон рекомендуемых скоростей довольно узок, а процессы регулирования скорости обладают большой инерционностью, летчику для эффективного управления скоростным режимом нужна «упреждающая» информация о тенденциях приближения скорости к граничным значениям.
В известных системах индикации значения V1, VR и V2 для текущих условий взлета (вес самолета, атмосферные условия) устанавливаются до начала разбега, а при заборе воды масса самолета существенно нарастает - соответственно необходимо динамически обновлять значения граничных скоростей.
Таким образом, сопоставительный анализ заявляемого решения с известными техническими решениями позволяет сделать вывод о соответствии заявляемого решения критериям изобретения новизна и изобретательский уровень. Заявляемое решение пригодно к осуществлению промышленным путем.
Техническим результатом изобретения является повышение безопасности процедуры забора воды на глиссировании противопожарным самолетом-амфибией путем снижения информационной загрузки экипажа за счет обеспечения пилота "мгновенно" распознаваемой визуальной сигнализацией о скоростных параметрах движения противопожарного самолета-амфибии в процессе забора воды на глиссировании, повышение эффективности противопожарного применения за счет снижения вероятности завершения забора с незаполненными полностью водяными баками, а также снижение вероятности прекращения взлета на необорудованной акватории.
Технический результат достигается тем, что в состав приборного оборудования противопожарного самолета-амфибии включена подсистема индикации скорости забора воды, используемая во время забора воды на глиссировании с момента касания до момента отрыва, которая обеспечивает летчику легко считываемую информацию о расположении величины текущей скорости и прогноз ее величины через определенные промежутки времени относительно рекомендуемых граничных значений скорости при заборе воды.
Предлагаемый способ визуальной индикации скорости противопожарного самолета-амфибии при заборе воды на глиссировании по водной поверхности заключается в выдаче условных цветовых сигналов, которые информируют пилота о соотношении величины текущей скорости самолета и установленных для данного режима полета ее граничных значений. Индикатор представляет собой блок световых секций-табло, цвет которых меняется в зависимости от положения текущей величины скорости и прогнозов ее значений относительно границ. В качестве граничных приняты минимальная скорость самолета при заборе воды и скорость отрыва. Учитывается изменение значений граничных скоростей по мере роста массы самолета при заполнении водяных баков в процессе забора воды. Цвет центральной секции-табло зависит от положения величины текущей скорости самолета относительно границ (например, зеленый - внутри границ, желтый - ниже нижней границы, синий - выше верхней), а другие световые секции-табло по аналогичному принципу индицируют прогнозы положения скорости относительно установленных границ. В зависимости от знака ускорения для индикации прогноза скоростного режима используют элементы блока световых табло, расположенные выше или ниже центрального. Прогноз положений скорости относительно границ вычисляется на основе величины текущего ускорения самолета и с учетом темпа изменений граничных значений, обусловленных ростом веса самолета.
Устройство для визуальной индикации скорости противопожарного самолета-амфибии при заборе воды на глиссировании по водной поверхности содержит датчики параметров движения самолета, вычислитель, базу данных и собственно индикатор, который выполнен из нескольких прямоугольных световых секций-табло, составляющих ромбовидную фигуру с возможностью вывода одного из трех условных цветов для каждой из этих секций. База данных содержит функциональные зависимости минимальной скорости самолета-амфибии при заборе воды на глиссировании от веса самолета и параметров состояния атмосферы и зависимость скорости отрыва от веса самолета. Вычислитель содержит блок расчета текущего веса самолета, связанный с датчиком объема забранной воды, и блок определения прогнозных значений скорости, а также блоки выбора цветов центральной и крайних секций индикатора, при этом блоки базы данных информационно связаны с блоком расчета веса самолета, а блоки выбора цветов связаны с блоками базы данных, причем блоки выбора цветов крайних секций связаны также с блоками определения прогнозных значений скорости, а каждая из секций индикатора связана с соответствующим блоком выбора цветов.
Предлагаемое изобретение поясняется чертежами.
На фиг.1 показана блок-схема индикатора скорости забора воды.
На фиг.2 приведен пример реализации индикатора.
На фиг.3 показана зависимость выбора цвета секций индикатора от значения скорости и текущего веса самолета.
На фиг.4 показан пример работы индикатора для случая штатного забора воды.
На фиг.5 показан пример работы индикатора для случая забора воды с продолженным взлетом после отказа одного двигателя.
На фиг.6 показан пример работы индикатора при прекращенном взлете после отказа одного двигателя.
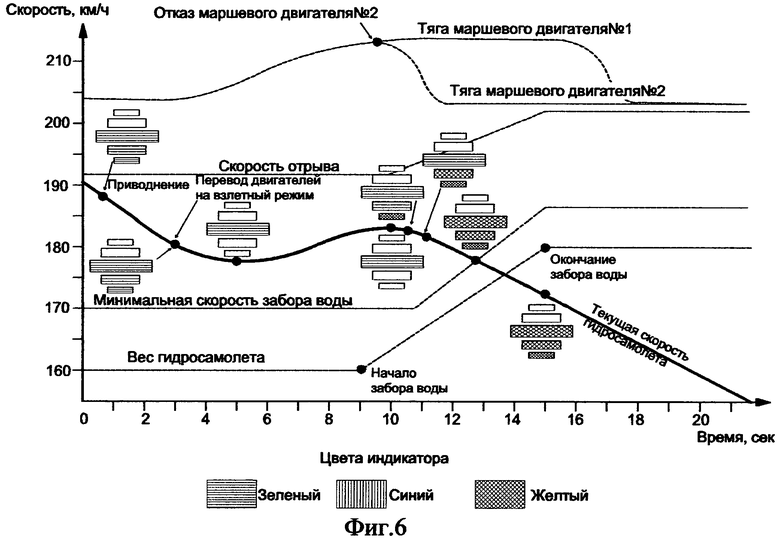
Предлагаемое устройство (фиг.1) визуальной индикации скорости противопожарного самолета-амфибии 1 при заборе воды на глиссировании по водной поверхности состоит из датчиков параметров движения 2 самолета 1, вычислителя 3, базы данных 4 и собственно индикатора 5. База данных 4 содержит функциональные зависимости минимальной скорости забора воды 6 от веса самолета 1 и параметров атмосферы (давления и температуры воздуха) и зависимость скорости отрыва 7 от веса самолета 1. Датчики 2 передают в вычислитель 3 данные о температуре и давлении наружного воздуха, об объеме забранной воды, а также о текущей скорости, тангаже, продольной и вертикальной перегрузках самолета.
В вычислителе 3 имеются
- блок расчета текущего веса 8, который учитывает изменения объема воды в баках, определяемые датчиком 9;
- блок определения прогнозов скорости 10, который определяет ожидаемые через определенные промежутки времени значения скорости самолета;
- блок выбора цвета центральной секции индикатора 11, в котором величина текущей скорости соотносится с текущими значениями граничных скоростей;
- блоки выбора цветов крайних секций индикатора 12, в которых прогнозные значения скорости соотносятся со значениями граничных скоростей, взятыми с учетом тенденций их изменения (к текущим значения границ добавляются ожидаемые приросты, обусловленные изменением веса самолета);
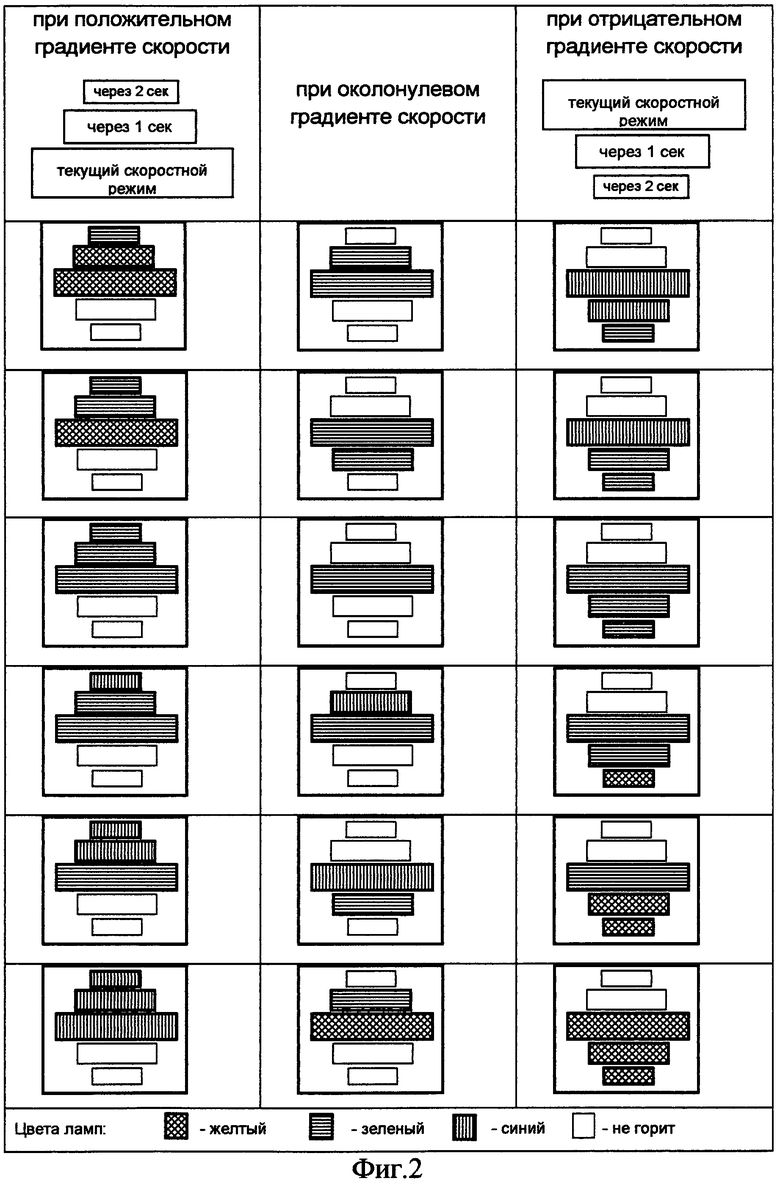
Индикатор 5 образован прямоугольными секциями различной длины, образующими ромбовидную фигуру. Центральная секция 13 всегда окрашена в один из условных цветов и показывает летчику соотношение величины текущей скорости и текущих граничных значений скорости (зеленый -внутри границ, желтый - ниже нижней границы, синий - выше верхней). Крайние секции 14 по аналогичному принципу показывают скоростной режим, ожидаемый через 1 секунду, а крайние секции 15 показывают скоростной режим, ожидаемый через 2 секунды. При положительном ускорении для прогноза скоростного режима используются секции 14 и 15, расположенные выше центральной 13 (нижние погашены), а при отрицательном наоборот - верхние погашены и используются нижние. Ромбовидная форма индикатора 5 в сочетании с таким принципом использования крайних секций обеспечивает летчика мнемонически понятной дополнительной информацией о том, что самолет разгоняется («треугольник вверх») или тормозится («треугольник вниз»). Крайние секции также могут быть погашены при малом ускорении (см. алгоритм ниже). На фиг.1 высвечены секции индикатора 5, используемые при движении самолета с положительным ускорением.
Работа устройства может быть описана следующим алгоритмом, который состоит из следующих операций в вычислителе 3 (фиг.1):
1. При помощи датчиков 2 определяются текущие атмосферные условия (давление и температура наружного воздуха).
2. С учетом текущих атмосферных условий из базы данных 4 выбирается зависимость Vminwt(Gс).
3. Полученные с датчиков 2 значения веса топлива Gт и веса воды Gв суммируются с «сухим» весом самолета и определяется текущий вес самолета 

4. По полученным с датчиков 2 измерениям параметров движения самолета 1 определяется текущая скорость Vтек и ускорение самолета w; ускорение определяется либо прямым дифференцированием w=dV/dt, либо по векторной сумме перегрузок nx и ny; в том и другом случае расчетное ускорение подвергается фильтрации для устранения высокочастотных шумов.
5. Вычисляются производные по времени (темп изменений) граничных значений 
6. Определяются цвета секций индикатора 5:
центральная секция 13 обозначена L0, выше нее секции L1 и L2, ниже нее секции L-1 и L-2;
цвета секций: 0 - черный; B - синий; G - зеленый; Y - желтый;
L+2=0, если w<2*wmin;
L+2=B, если; 
L+2=G, если 
L+2=Y, если 
L+l=0, если w<wmin;
L+1=B, если 
L+1=G, если 
L+1=Y, если 
L0=B, если 
L0=G, если 
L0=Y, если 
L-1=0, если w>0 или abs(w)<wmin;
L-1=B, если 
L-1=G, если
L-1=Y, если
L-2=0, если w>0 или abs(w)<2*wmin;
L-2=В, если
L-2=G, если
L-2=Y, если
wmin - пороговое (практически нулевое) ускорение;
Δt - глубина прогноза (в экспериментах на стенде принималась Δt=1 сек).
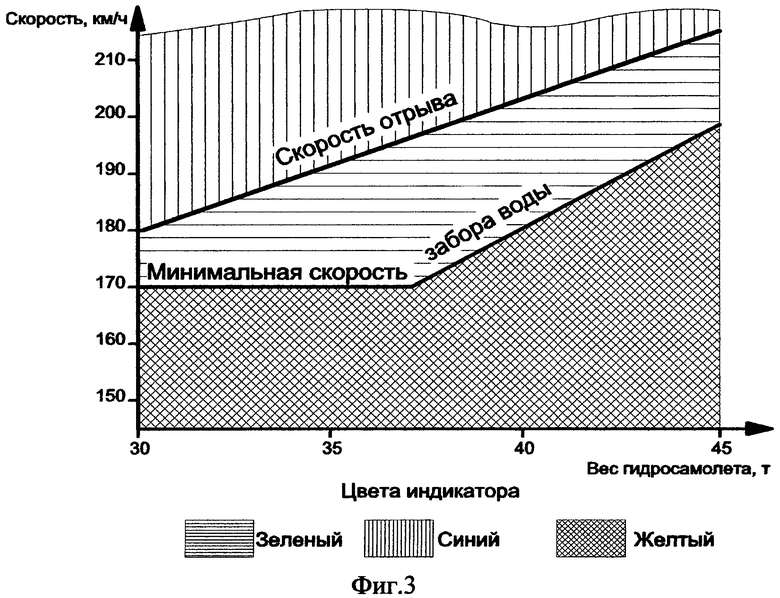
Способ индикации реализуют путем обработки информации о текущем скоростном режиме и о тенденциях его изменений, включающей кодирование этих характеристик условными цветами. На фиг.3 показан пример графиков граничных значений скоростей противопожарного самолета-амфибии при заборе воды - минимальной скорости забора воды и скорости отрыва в зависимости от нарастающего по мере заполнения водяных баков веса противопожарного самолета-амфибии. Эти графики разделяют соответствующие диапазоны условных цветов секций индикатора. Цвет центрального табло определяют положением величины текущей скорости самолета относительно границ в соответствии с диапазонами, показанными на фиг.3. Другие световые секции-табло по аналогичному принципу индицируют прогнозы положения скорости относительно установленных границ, ожидаемые через определенные промежутки времени. Эти прогнозы определяют на основе величины текущего ускорения самолета и с учетом темпа изменений граничных значений, обусловленных ростом веса самолета при заборе воды. Как показано в примере реализации индикатора на фиг.2, для индикации прогноза скоростного режима в зависимости от знака ускорения используют верхние или нижние элементы блока световых секций-табло. В левой колонке фиг.2 сверху вниз показаны фазы индикации при ускорении (разгоне) самолета-амфибии со скорости ниже минимальной скорости забора воды до скорости отрыва. В правой колонке - фазы индикации при торможении самолета от скорости выше скорости отрыва до минимальной скорости забора воды. О том, что скорость самолета практически не изменяется (ускорение около нуля), летчика информируют путем исключения из индикации крайних секций-табло. В средней колонке фиг.2 показаны возможные варианты состояний индикатора при малых ускорениях. При этом, когда светится только центральная секция, ускорение минимально.
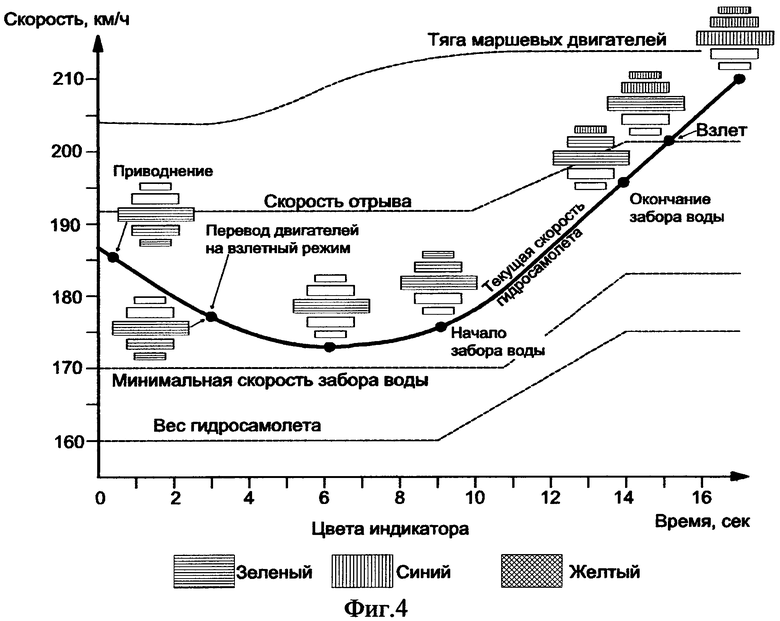
На фиг.4 показан пример функционирования индикатора для случая штатного забора воды. В момент приводнения скорость самолета выше минимальной скорости забора воды и торможение самолета, вызванное гидродинамическими силами, соответствует расчетному - в результате на индикаторе центральная секция и две секции ниже нее окрашены в зеленый цвет, что информирует пилота о штатно выполненной посадке на воду. На 3-й секунде после приводнения, убедившись в контакте с водной поверхностью и начале процесса устойчивого глиссирования, пилот устанавливает взлетный режим работы двигателей. Однако до выхода двигателей на повышенный режим самолет тормозится, поэтому верхние секции индикатора погашены, а нижние показывают прогноз скоростного режима. Скорость самолета выше минимальной скорости забора воды и торможение самолета, вызванное гидродинамическими силами, частично компенсируется нарастающей тягой двигателей - в результате центральная и две секции ниже нее окрашены в зеленый цвет. На 6-й секунде под действием увеличивающейся тяги двигателей самолет прекращает торможение и имеет близкое к нулю ускорение и в результате окрашена только центральная секция (по-прежнему в зеленый цвет), а все верхние и нижние секции не окрашены. На 9-й секунде пилот, убедившись в начале разгона самолета, начинает процесс забора воды и выпускает водозаборные устройства. Наличие разгона индицирует то, что для прогноза скоростного режима высвечены верхние секции индикатора, а нижние погашены. В нашем примере к 9-й секунде на индикаторе центральная секция и обе секции выше нее окрашены в зеленый цвет. На 14-й секунде пилот завершает забор воды и убирает водозаборные устройства. Скорость самолета выше минимальной скорости забора воды и приближается к скорости отрыва. При этом центральная секция и первая секция выше нее окрашены в зеленый цвет, а самая верхняя секция окрашена в синий цвет, что обозначает достижение через 2 секунды скорости отрыва. На 15-й секунде самолет практически достигает скорости отрыва. При этом центральная секция по-прежнему окрашена в зеленый цвет, а обе секции выше нее окрашены в синий цвет, что означает готовность самолета к взлету через 1 секунду. На 17-й секунде самолет разгоняется до скорости выше скорости отрыва и продолжает увеличивать скорость. При этом центральная секция и обе секции выше нее окрашены в синий цвет, что означает необходимость произвести взлет.
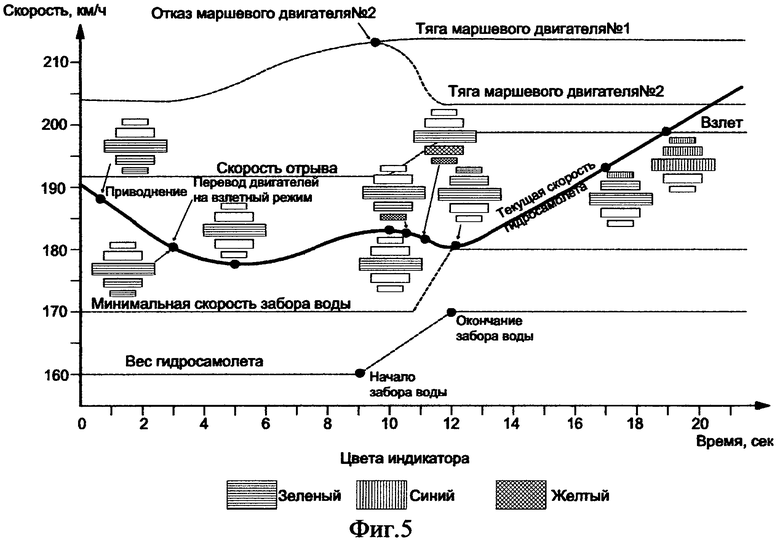
На фиг.5 показан пример функционирования индикатора при продолженном взлете после отказа одного двигателя. С момента приводнения и до 9-й секунды схема функционирования индикатора аналогична показанной на фиг.4. На 10-й секунде происходит отказ одного из двигателей. Уменьшение суммарной тяги двигателей при выпущенных водозаборных устройствах, создающих большое сопротивление, приводит к торможению самолета и ускорение самолета становится околонулевым. При этом центральная секция индикатора окрашена в зеленый цвет. Верхние и нижние секции индикатора не окрашены. Через 10,5 сек самолет начинает тормозиться, но так как текущая скорость самолета превышает минимальную скорость забора, то центральная секция и первая секция ниже нее окрашены в зеленый цвет, а самая нижняя секция окрашена в желтый цвет. Индикация цветов на нижних секциях сигнализирует о торможении самолета. Желтый цвет самой нижней секции - о скором, через 2 сек, снижении скорости до уровня ниже минимальной скорости забора воды. Так как водозаборные устройства пилотом не убраны, а тяга одного двигателя недостаточна для преодоления сопротивления от ВЗУ, то происходит дальнейшее торможение и на 11-й секунде центральная секция индикатора окрашена в зеленый цвет, а обе нижние секции окрашены в желтый цвет. Пилот принимает решение убрать водозаборные устройства. К 12-й секунде водозаборные устройства убраны, исчезает вызванное этим гидродинамическое сопротивление, самолет начинает разгон - нижние секции индикатора гаснут, а центральная и обе верхних секции индикатора окрашены в зеленый цвет. Пилот принимает решение выполнить продолженный взлет и продолжает разгон самолета. На 17-й секунде скорость самолета выше минимальной скорости забора воды и приближается к скорости отрыва. При этом центральная секция и первая секция выше нее окрашены в зеленый цвет, а самая верхняя секция окрашена в синий цвет, что обозначает достижение через 2 секунды скорости отрыва. На 19-й секунде самолет достигает скорости отрыва. При этом центральная секция и обе верхние секции окрашены в синий цвет, что означает готовность самолета к взлету.
На фиг.6 показан пример функционирования индикатора при прекращенном взлете после отказа одного двигателя. С момента приводнения и до 9-й секунды схема функционирования индикатора аналогична показанной на фиг.4. На 9-й секунде пилот, убедившись в начале разгона самолета, начинает процесс забора воды и выпускает водозаборные устройства. В этот момент происходит отказ одного из двигателей. Уменьшение суммарной тяги двигателей при выпущенных водозаборных устройствах, создающих большое сопротивление, приводит к торможению самолета и уже на 10-й секунде ускорение самолета становится околонулевым. При этом центральная секция индикатора окрашена в зеленый цвет. Верхние и нижние секции индикатора не окрашены. На 10,5 сек самолет начинает тормозиться, но так как текущая скорость самолета превышает минимальную скорость забора, то на индикаторе центральная секция и первая секция ниже нее окрашены в зеленый цвет, а самая нижняя секция окрашена в желтый цвет. Желтый цвет самой нижней секции сигнализирует о торможении самолета и скором, через 2 сек, снижении скорости до уровня ниже минимальной скорости забора воды. Уборка водозаборных устройств могла бы предотвратить уменьшение скорости ниже минимальной. Так как водозаборные устройства пилотом не убраны, то происходит дальнейшее торможение и на 11-й секунде центральная секция индикатора окрашена в зеленый цвет, а обе нижние секции - в желтый цвет. На 13-й секунде самолет тормозится до уровня ниже минимальной скорости забора воды - центральная секция индикатора и обе нижние секции окрашены в желтый цвет. На 15-й секунде самолет продолжает торможение - центральная секция индикатора и нижние секции окрашены в желтый цвет. Пилот убирает водозаборные устройства. Но продолженный взлет невозможен - пилот принимает решение прервать взлет и снижает тягу исправного двигателя.
В отличие от известных способов визуальной индикации скорости V1 предлагаемый индикатор постоянно индицирует в легко считываемом цветовом формате положение величины текущей скорости самолета относительно границ рекомендованного диапазона скоростей, а также за счет индикации прогнозных значений скорости заблаговременно информирует пилота о приближении величины скорости к границам. Это дает пилоту информацию, необходимую для осуществления своевременных управляющих действий по уборке-выпуску водозаборных устройств и регулированию режимов работы двигателей противопожарного самолета-амфибии, чтобы поддерживать величину текущей скорости выше минимальной скорости забора и предотвращать преждевременный (до заполнения баков) отрыв самолета, а в случае отказа одного из двигателей в процессе забора воды дают однозначную информацию для принятия решения о продолжении взлета или прекращении взлета и остановке.
Исследование эффективности предлагаемого способа индикации скорости забора воды выполнено при имитации задач забора воды на пилотажном стенде самолета-амфибии Бе-200. При этом использован формат индикатора, показанный на фиг.2. По отзывам пилотов наличие такого индикатора значительно облегчает выдерживание скоростного режима в процессе забора воды.
Индикатор скорости забора воды может быть реализован в виде самостоятельного светосигнального устройства, расположенного на приборной доске пилотов, или в составе одного из кадров электронной экранной индикации в кабине экипажа противопожарного самолета-амфибии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНДИКАЦИИ ЗЕМНОЙ ПОВЕРХНОСТИ ДЛЯ ОБЕСПЕЧЕНИЯ МАЛОВЫСОТНЫХ ПОЛЕТОВ САМОЛЕТОВ (ВЕРТОЛЕТОВ) | 2008 |
|
RU2386570C1 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| САМОЛЕТ-АМФИБИЯ (ГИДРОСАМОЛЕТ) С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2016 |
|
RU2641359C1 |
| САМОЛЕТ-АМФИБИЯ | 2011 |
|
RU2471677C1 |
| СИСТЕМА ЗАПОЛНЕНИЯ ВОДОЙ БАКОВ-ОТСЕКОВ ГИДРОСАМОЛЕТА НА ГЛИССИРОВАНИИ | 2016 |
|
RU2615077C1 |
| УСТРОЙСТВО УДАЛЕНИЯ ВОЗДУХА ИЗ ВОДОВОЗДУШНОЙ СТРУИ, ПОСТУПАЮЩЕЙ ПРИ ЗАБОРЕ ВОДЫ НА ГЛИССИРОВАНИИ САМОЛЕТА-АМФИБИИ | 2015 |
|
RU2628632C2 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
| САМОЛЕТ-АМФИБИЯ | 2014 |
|
RU2582196C1 |
| САМОЛЕТ-АМФИБИЯ - ЛЕТНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2542800C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ - АМФИБИЯ | 2017 |
|
RU2661379C1 |
Группа изобретений относится к визуальной индикации скорости противопожарного самолета-амфибии при заборе воды на глиссировании по водной поверхности. При использовании способа пилот информируется о соотношении текущей скорости и установленных для данного режима полета ее граничных значений с помощью условных цветов на блоке световых секций-табло. Цвет центральной секции отражает текущую скорость самолета, а цвета верхней и нижней секций используют для индикации прогноза скоростного режима в зависимости от веса и ускорения самолета. Устройство индикации скорости содержит датчики параметров движения самолета, вычислитель, базу данных, содержащую параметры состояния атмосферы и зависимости скорости отрыва от веса самолета, и индикатор, выполненный в виде ромбовидных световых секций-табло. Обеспечивается более полное наполнение баков водой за счет предоставления информации о скорости самолета. 1 з.п. ф-лы, 6 ил.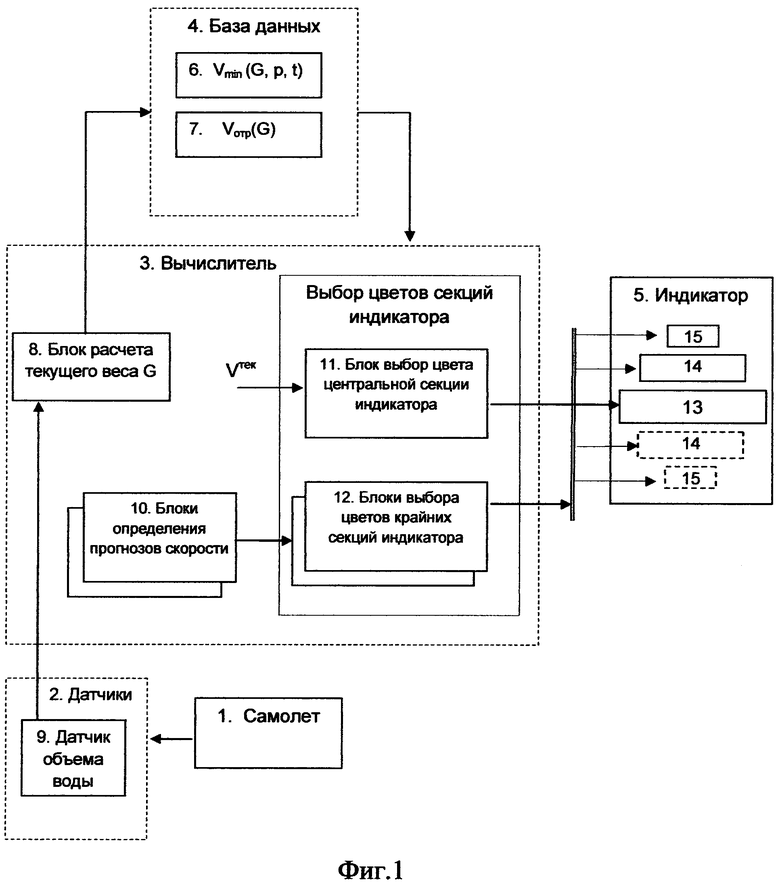
1. Способ визуальной индикации скорости противопожарного самолета-амфибии при заборе воды на глиссировании по водной поверхности, заключающийся в выдаче визуальных сигналов, которые информируют пилота о соотношении величины текущей скорости самолета и установленных для данного режима полета ее граничных значений, отличающийся тем, что информацию о текущем скоростном режиме и о его изменениях пилоту выдают условными цветами на блоке световых секций-табло, меняющимися в зависимости от положения текущей величины скорости и прогнозов ее значений относительно границ, при этом в качестве граничных значений принимают минимальную скорость самолета на водозаборе и скорость отрыва, значения которых изменяют с учетом увеличения веса самолета по мере заполнения водяных баков, при этом цвет центрального табло определяют положением величины текущей скорости самолета относительно границ, а другие световые секции-табло по аналогичному принципу индицируют прогнозы положения скорости относительно установленных границ, определяемые на основе величины текущего ускорения самолета и с учетом темпа изменений граничных значений, обусловленных ростом веса самолета, причем для индикации прогноза скоростного режима в зависимости от знака ускорения используют верхние или нижние элементы блока световых секций-табло.
2. Устройство для визуальной индикации скорости противопожарного самолета-амфибии при заборе воды на глиссировании по водной поверхности, содержащее датчики параметров движения самолета, вычислитель, базу данных и собственно индикатор, отличающееся тем, что индикатор выполнен из нескольких прямоугольных световых секций-табло, составляющих ромбовидную фигуру с возможностью вывода одного из трех условных цветов для каждой из этих секций, а база данных содержит функциональные зависимости минимальной скорости самолета-амфибии при заборе воды на глиссировании от веса самолета и параметров состояния атмосферы и зависимость скорости отрыва от веса самолета, при этом вычислитель содержит блок расчета текущего веса самолета, связанный с датчиком объема забранной воды, и блок определения прогнозных значений скорости, а также блоки выбора цветов центральной и крайних секций индикатора, при этом блоки базы данных информационно связаны с блоком расчета веса самолета, а блоки выбора цветов связаны с блоками базы данных, причем блоки выбора цветов крайних секций связаны также с блоками определения прогнозных значений скорости, а каждая из секций индикатора связана с соответствующим блоком выбора цветов.
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ, СПОСОБ ЕГО УПРАВЛЕНИЯ И СИСТЕМА ИНДИКАЦИИ ПО УГЛУ АТАКИ САМОЛЕТА | 2010 |
|
RU2442724C1 |

