ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к электрической зубной щетке.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
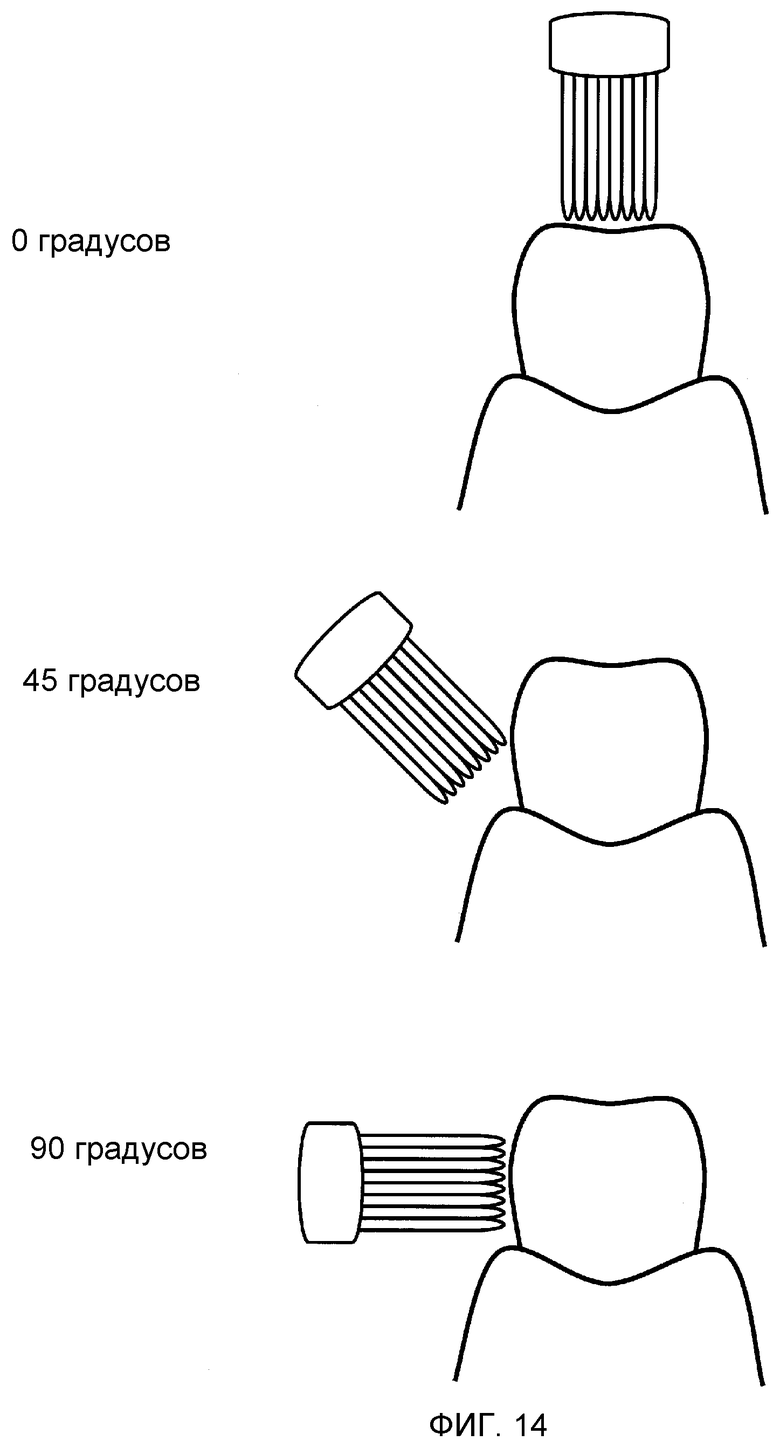
Известен тип электрической зубной щетки, в которой щетка, перемещающаяся с высокой скоростью, для выполнения чистки зубов (удаления остатков пищи или зубной бляшки) упирается в зубы. В таких электрических зубных щетках получаемый результат чистки зависит от угла, под которым щетка упирается в зубы. Например, когда щетка упирается в зуб под углом 90 градусов к оси зуба, может развиваться наибольшая сила удаления зубной бляшки относительно плоскости зуба. Когда щетка упирается в зуб под углом 45 градусов к оси зуба, кончик щетки легко проникает в межзубной промежуток или зубодесневой карман (между зубом и десневым краем), и остатки пищи или зубная бляшка могут быть эффективно вычищены из межзубного промежутка или зубодесневого кармана.
Таким образом, существует оптимальный угол наклона щетки (угол наклона щетки относительно оси зуба), соответствующий очищаемой области или желательному результату чистки. Однако немногие пользователи понимают, каким должен быть желательный угол наклона щетки. Даже если пользователь понимает, каким должен быть угол наклона щетки, то поскольку пользователь не может зафиксировать состояние, в котором щетка фактически упирается в зубы во время чистки зубов, угол наклона щетки вряд ли соответствует оптимальному значению.
Например, патентный документ 1 раскрывает идею, в которой ориентация корпуса зубной щетки относительно оси определяется по четырем или восьми элементам, чтобы на основании результатов определения оценить очищаемую область. В частности, множество веерообразных сегментов расположены по кругу на корпусе, и то, в каком сегменте находится проводящая сфера, определяется по изменению электрического сопротивления, таким образом оценивая ориентацию корпуса зубной щетки. Однако, механизм, раскрытый в патентном документе 1, трудно уменьшить в размере и осуществить.
Документ предшествующего уровня техники
Патентный документ
Патентный документ 1: публикация японской нерассмотренной патентной заявки № 2005-152217
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМА, РЕШАЕМАЯ ИЗОБРЕТЕНИЕМ
Задача настоящего изобретения заключается в обеспечении способа легкого достижения правильного угла наклона щетки в электрической зубной щетке.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ
Для решения этой задачи настоящее изобретение реализуется в следующих конфигурациях.
Электрическая зубная щетка по настоящему изобретению включает в себя: корпус электрической зубной щетки, включающий в себя участок для захватывания; чистящий элемент, включающий в себя щетку; средство привода для приведения щетки в движение; средство поворота для относительного поворота чистящего элемента относительно корпуса электрической зубной щетки для изменения ориентации щетки; средство определения положения для определения положения корпуса электрической зубной щетки; и средство управления для управления средством поворота таким образом, чтобы угол наклона щетки, который является углом наклона щетки относительно оси зуба, принял заданное оптимальное значение, на основании определенного положения.
В этой конфигурации чистящий элемент автоматически поворачивается соответственно положению электрической зубной щетки, и управление выполняется таким образом, чтобы угол наклона щетки принял оптимальное значение. Поэтому правильный угол наклона щетки может легко обеспечиваться во время чистки для получения хорошего результата.
При этом средство управления предпочтительно включает в себя: средство оценки области для оценки того, какая область из множества областей, образованных путем деления поверхности зубного ряда, чистится в настоящее время, на основании определенного положения; и средство оценки угла наклона щетки для оценки угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, на основании определенного положения, и оптимальное значение угла наклона щетки, ранее заданного для каждой очищаемой области, и полученный в результате оценки угол наклона щетки сравниваются для управления средством поворота таким образом, чтобы угол наклона щетки принял оптимальное значение.
Прилипание остатков пищи или зубной бляшки зависит от вида зуба (такого, как зуб верхней/нижней челюсти и моляр/резец), или участка (такого, как язычная сторона/щечная сторона, зубная поверхность/окклюзионная поверхность и зубодесневой карман), и эффективный угол наклона щетки является различным для каждой области. Даже для одинаковых зубов способ наложения щетки изменяется на 180 градусов для правой и левой сторон зубного ряда. Поэтому в настоящем изобретении оценивается очищаемая область, и угол наклона щетки соответственно регулируется согласно результату оценки, который позволяет достичь лучшего результата очистки.
Предпочтительно средство управления управляет средством привода таким образом, чтобы направление движения или частота движения щетки изменялись согласно определенному положению. Например, когда средство привода образовано поворотным двигателем, направление поворота поворотного двигателя переключается, или изменяется число оборотов, что позволяет изменять направление движения или частоту движения щетки.
Таким образом, лучший результат очистки может быть достигнут путем не только управления углом наклона щетки, но также и движением щетки.
Предпочтительно средство определения положения определяет положение на основании выходного сигнала датчика ускорения.
Следовательно, положение щетки может быть определено с высокой точностью и очищаемая область и угол наклона щетки могут быть оценены с высокой точностью и большим разрешением, чем известно из уровня техники. Поскольку датчик ускорения является небольшим по размеру, он может быть легко вмонтирован в корпус электрической зубной щетки. Может использоваться однокоординатный датчик ускорения, и предпочтительно может использоваться многокоординатный (двухкоординатный, трехкоординатный или с большим количеством координат) датчик ускорения.
Предпочтительно электрическая зубная щетка дополнительно включает в себя средство извещения для извещения о том, что угол наклона щетки имеет оптимальное значение. Следовательно, может быть улучшено удобство в использовании. Например, в качестве способа извещения может использоваться свет, звук, голос и вибрация.
Предпочтительно оптимальное значение может изменяться. Следовательно, электрическая зубная щетка может гибко использоваться таким образом, чтобы угол наклона щетки устанавливался на 90 градусов, когда желательно получить большую силу удаления зубной бляшки, и чтобы угол наклона щетки устанавливался на 45 градусов, когда желательно эффективно почистить область, такую как зубодесневой карман между зубом и краем десны.
Предпочтительно средство управления управляет средством поворота таким образом, чтобы чистящий элемент располагался в заданном исходном положении после использования электрической зубной щетки или после начала использования электрической зубной щетки. Следовательно, даже если чистка зубов закончена, несмотря на то, что ориентация щетки отклонена от исходного положения, ориентация щетки автоматически возвращается к исходному положению до начала следующей чистки зубов. Следовательно, оптимальный угол наклона щетки может быстро достигаться при начале чистки зубов.
Средство и элементы обработки сочетаются в максимально возможной степени для того, чтобы обеспечить реализацию настоящего изобретения.
РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению, в электрической зубной щетке может легко достигаться правильный угол наклона щетки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
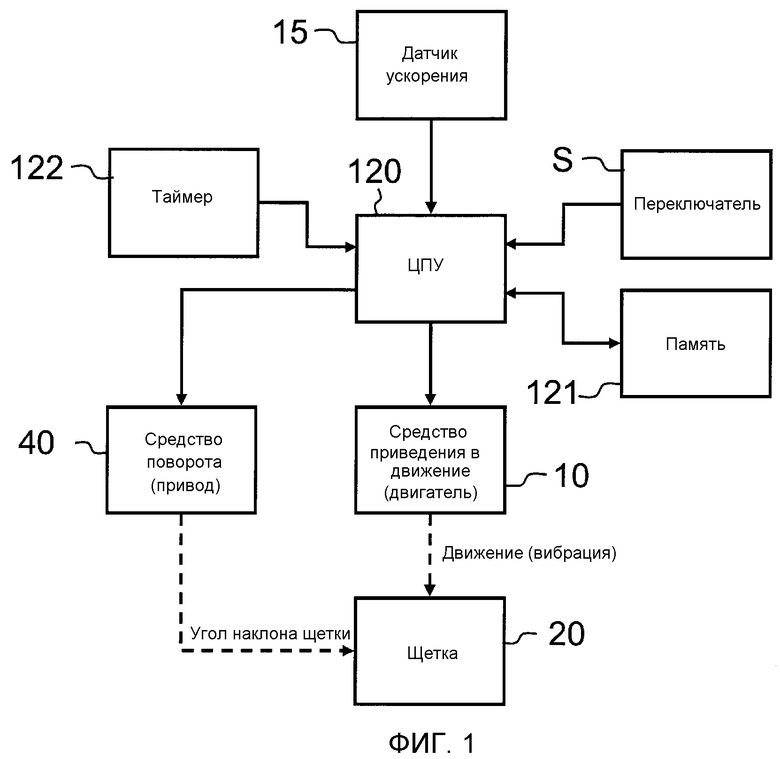
Фиг.1 - блок-схема электрической зубной щетки согласно первому варианту осуществления.
Фиг.2 - вид в разрезе, иллюстрирующий внутреннюю конфигурацию электрической зубной щетки по первому варианту осуществления.
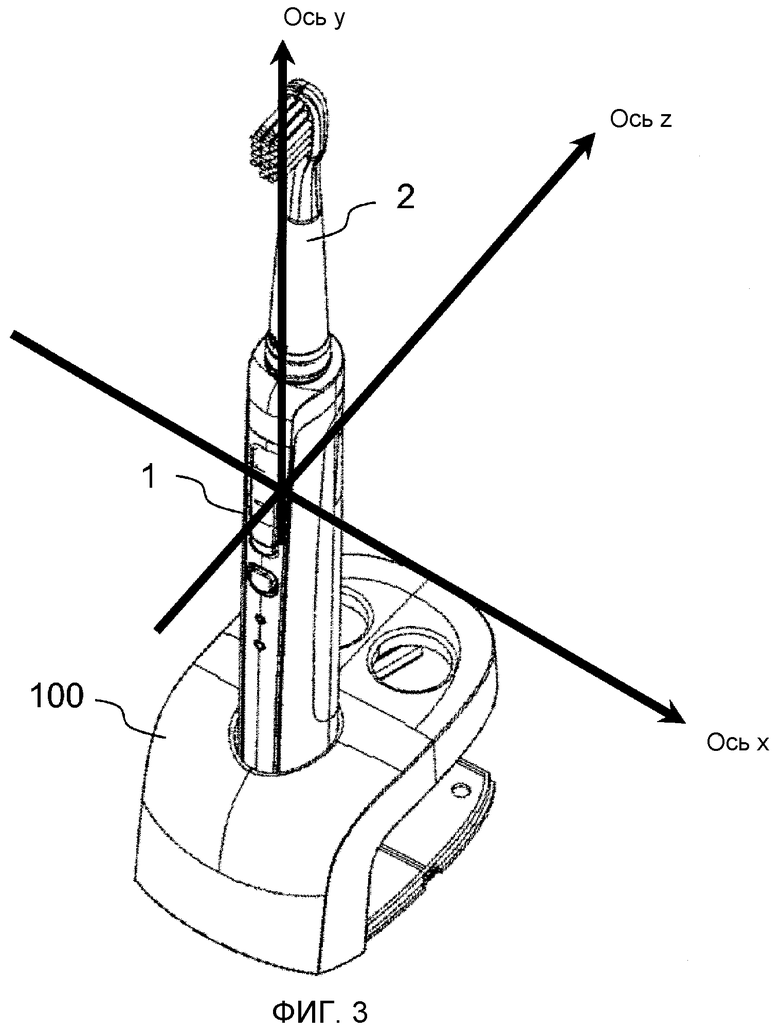
Фиг.3 - вид в перспективе, иллюстрирующий внешний вид электрической зубной щетки.
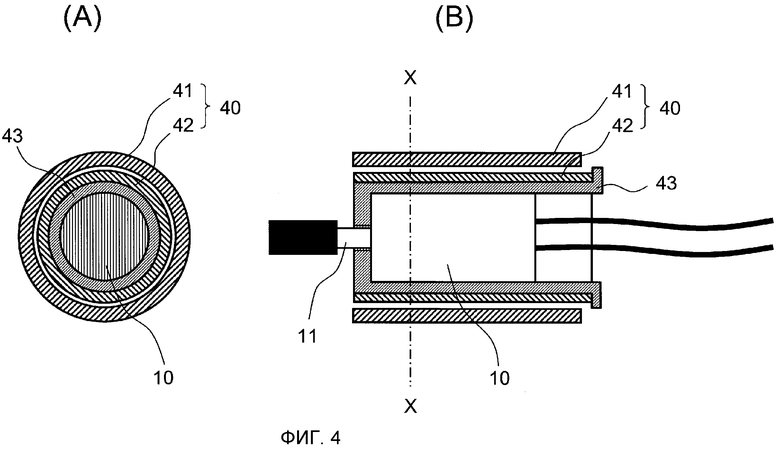
Фиг.4,A и 4,B - виды, каждый из которых иллюстрирует конфигурацию привода, регулирующего угол наклона щетки.
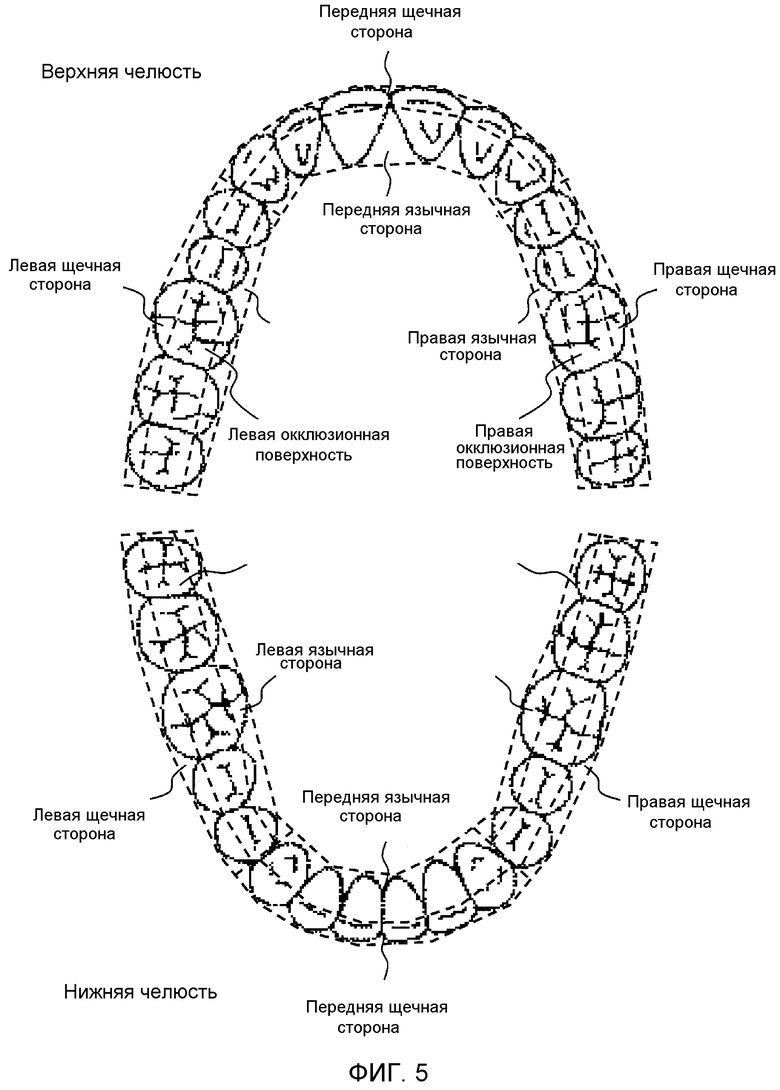
Фиг.5 - вид, иллюстрирующий деление очищаемой области на участки.
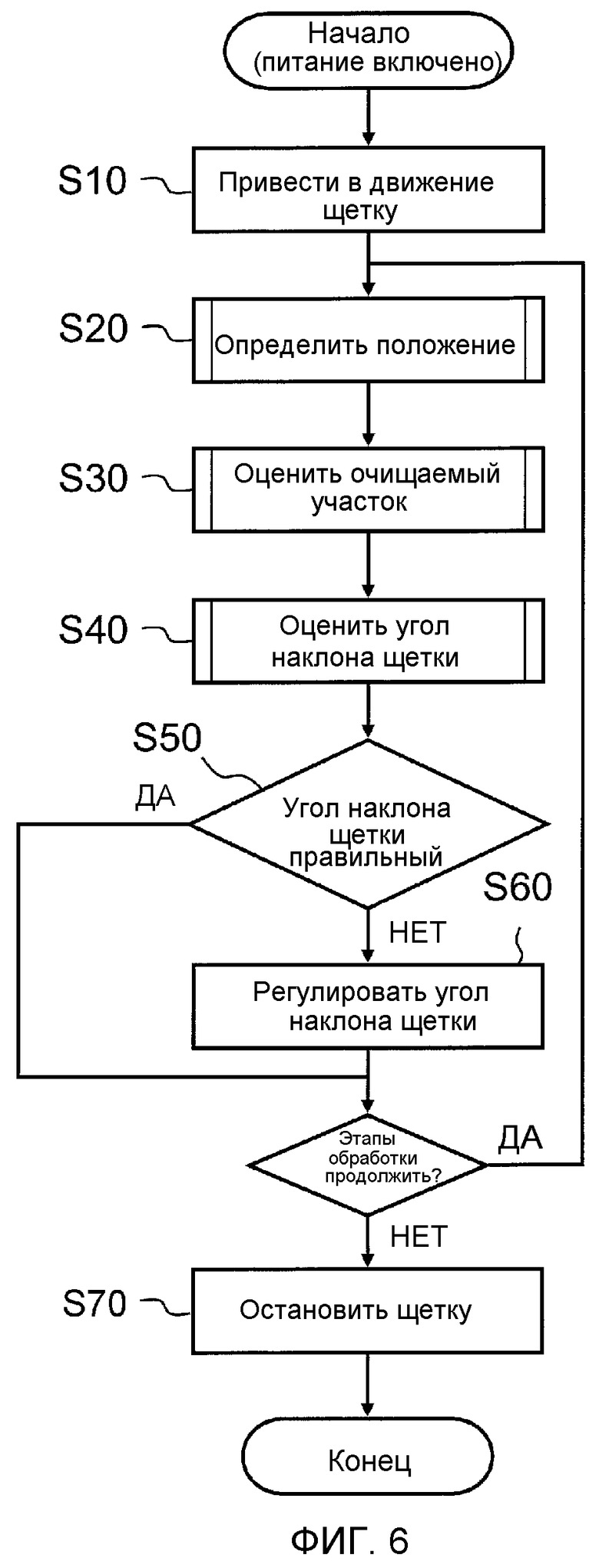
Фиг.6 - блок-схема, иллюстрирующая основной алгоритм работы электрической зубной щетки.
Фиг.7 - блок-схема обработки определения положения.
Фиг.8 - блок-схема обработки оценки очищаемой области (верхняя челюсть).
Фиг.9 - блок-схема обработки оценки очищаемой области (нижняя челюсть).
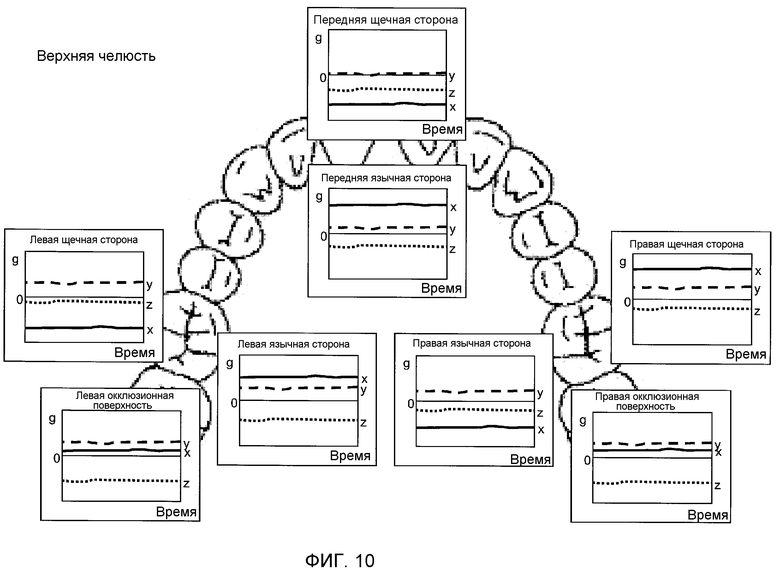
Фиг.10 - вид, иллюстрирующий примеры выходных сигналов Ax, Ay, Az датчика ускорения в каждой очищаемой области верхней челюсти.
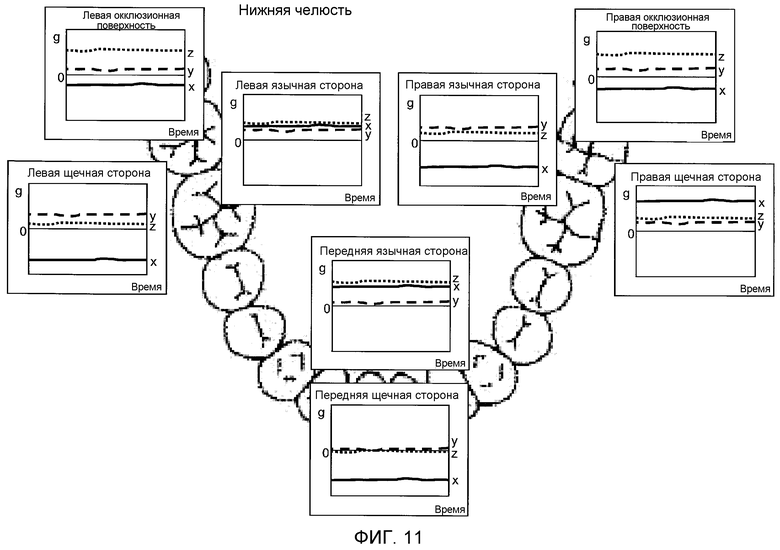
Фиг.11 - вид, иллюстрирующий примеры выходных сигналов Ax, Ay, Az датчика ускорения в каждой очищаемой области нижней челюсти.
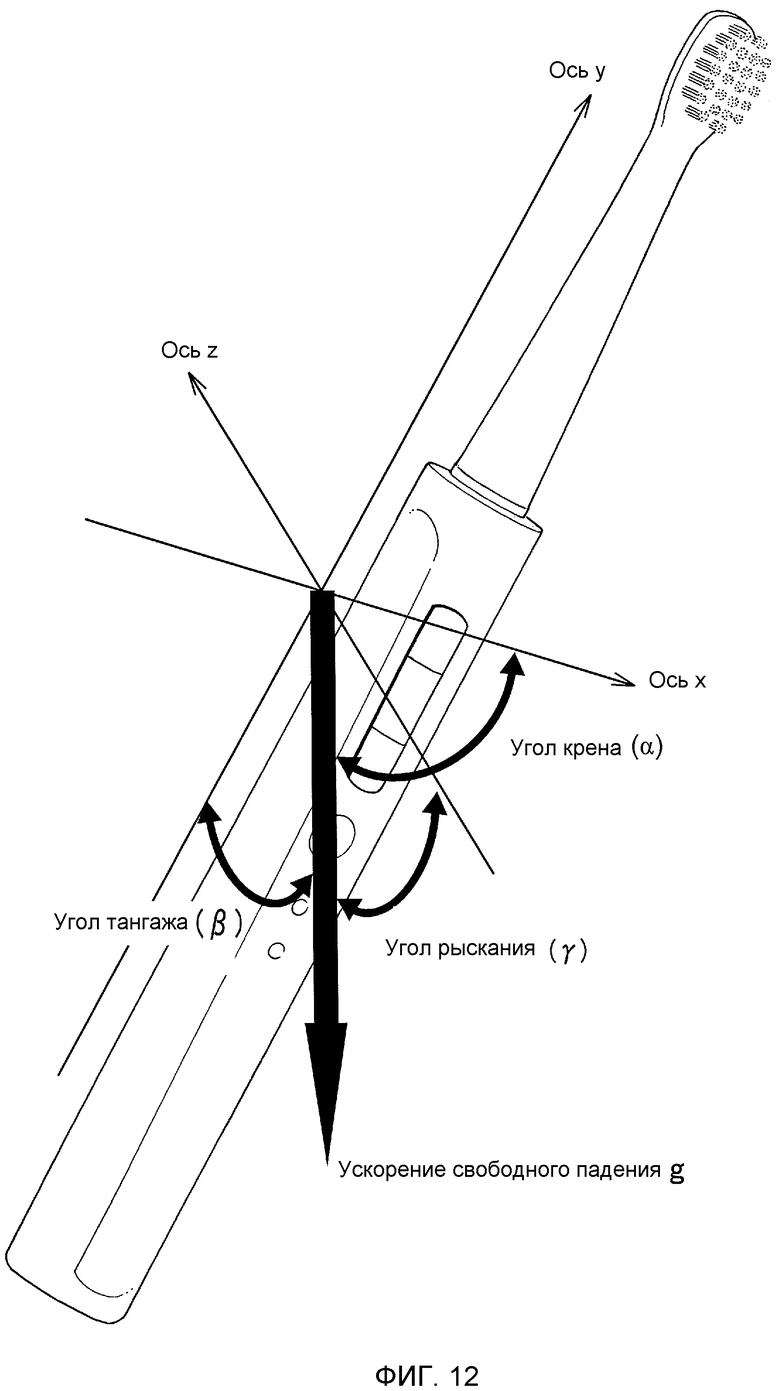
Фиг.12 - вид, иллюстрирующий определение углового положения электрической зубной щетки.
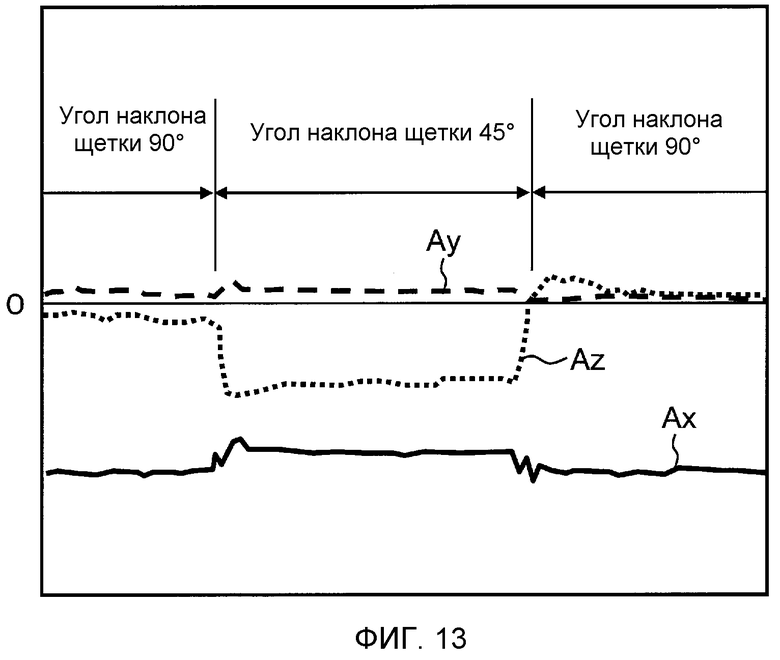
Фиг.13 - вид, иллюстрирующий изменение формы волны выходного сигнала в соответствии с изменением угла наклона щетки.
Фиг.14 - вид, поясняющий угол наклона щетки.
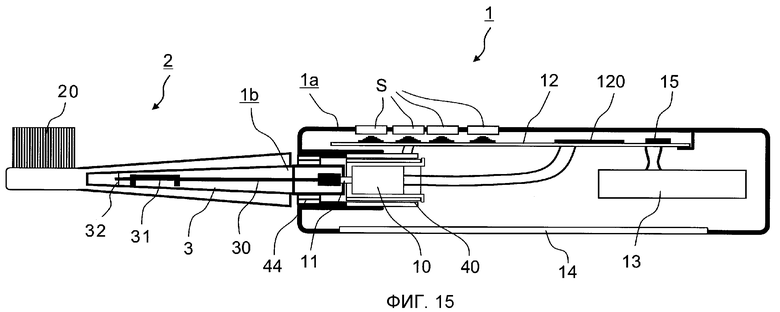
Фиг.15 - вид в разрезе, иллюстрирующий внутреннюю конфигурацию электрической зубной щетки согласно второму варианту осуществления.
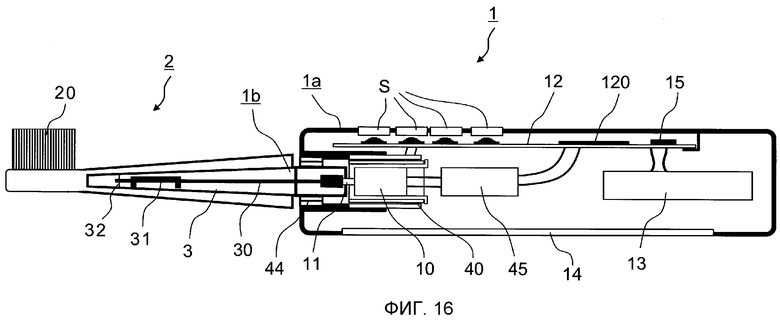
Фиг.16 - вид в разрезе, иллюстрирующий внутреннюю конфигурацию электрической зубной щетки согласно третьему варианту осуществления.
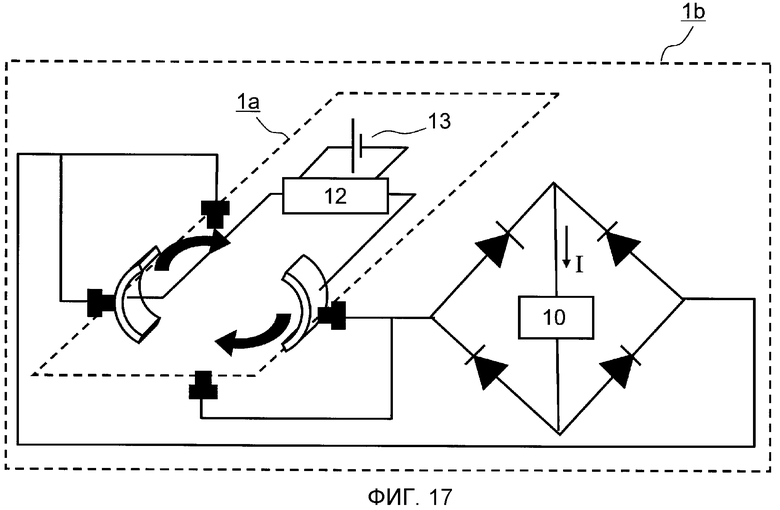
Фиг.17 - вид, иллюстрирующий конфигурацию участка электрического соединения, в котором используется контактная щетка.
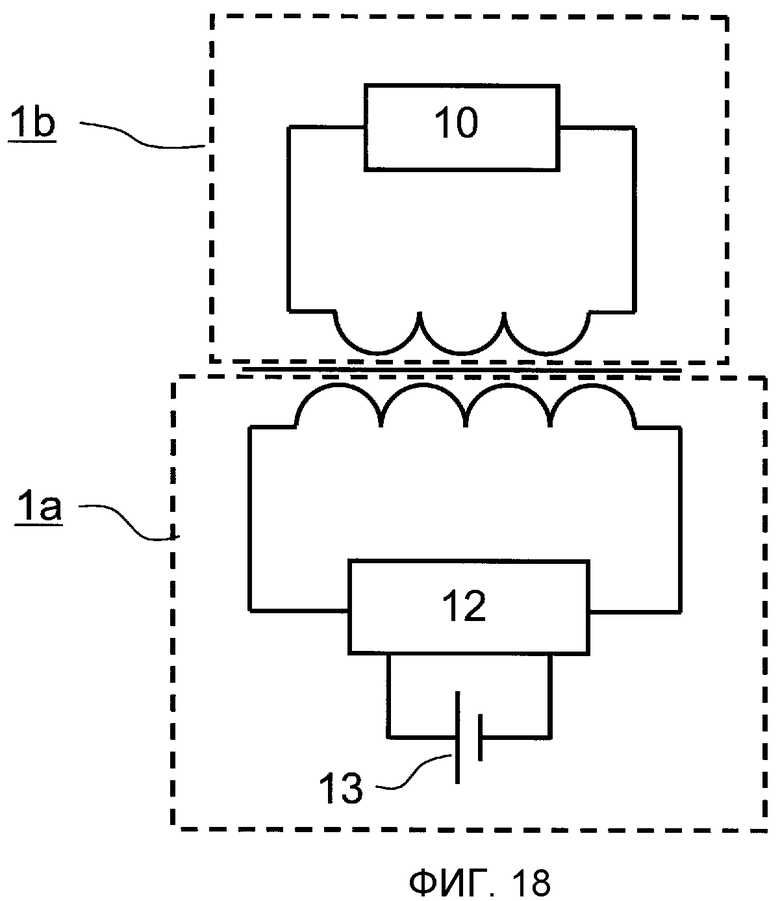
Фиг.18 - вид, иллюстрирующий конфигурацию участка электрического соединения, в котором используется катушка.
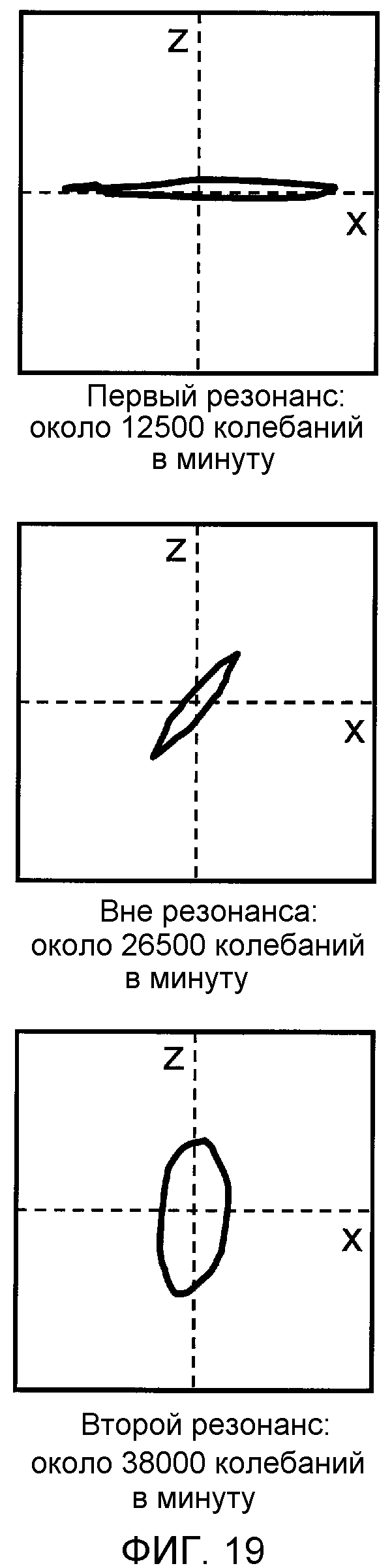
Фиг.19 - вид, поясняющий траекторию щетки.
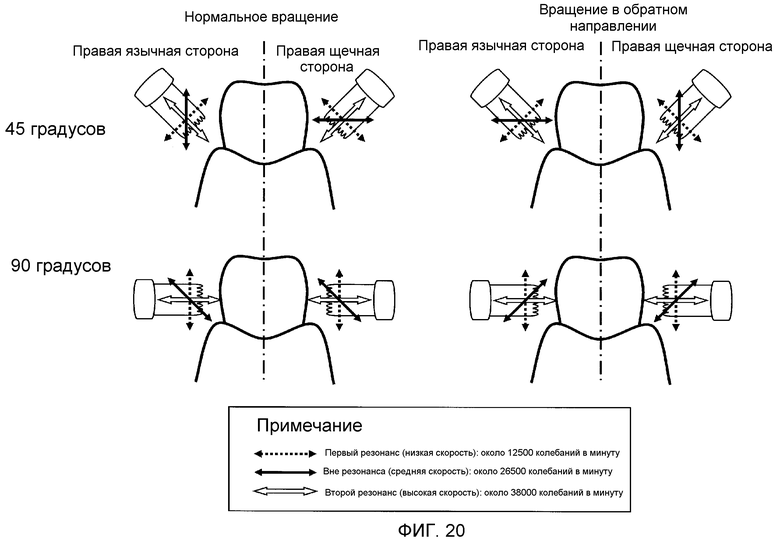
Фиг.20 - вид, иллюстрирующий зависимость между углом наклона щетки и перемещением щетки.
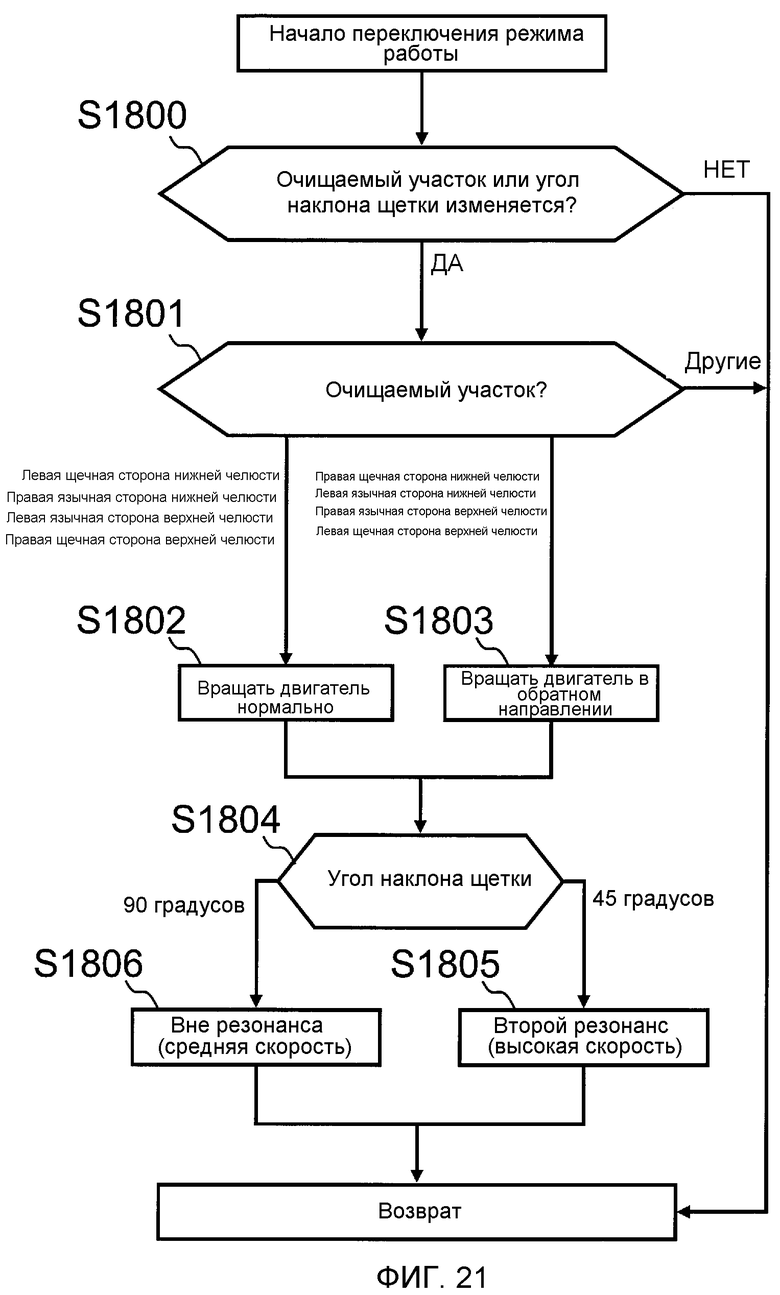
Фиг.21 - блок-схема обработки переключения режима работы согласно пятому варианту осуществления.
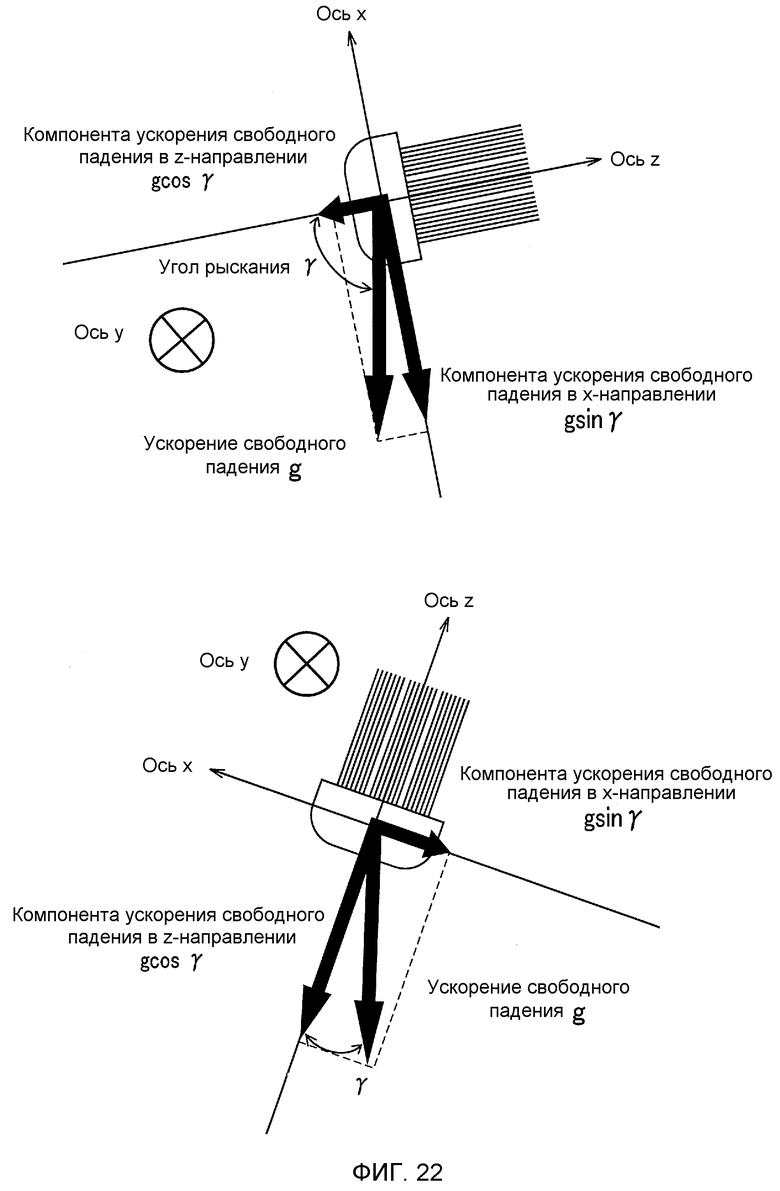
Фиг.22 - вид, поясняющий определение положения согласно шестому варианту осуществления.
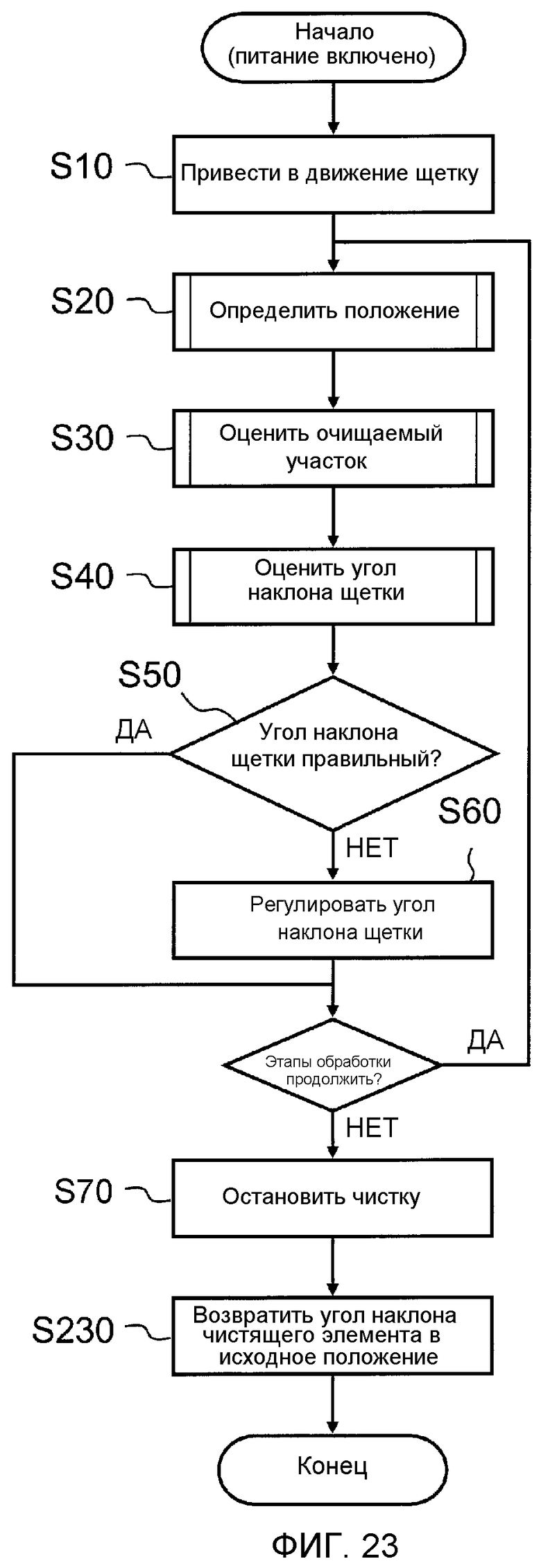
Фиг.23 - вид, поясняющий обработку автоматического возврата согласно седьмому варианту осуществления.
ЛУЧШИЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Ниже со ссылкой на чертежи будут подробно описаны предпочтительные варианты осуществления настоящего изобретения.
Первый вариант осуществления
Конфигурация электрической зубной щетки
Конфигурация электрической зубной щетки описана со ссылкой на фиг.1, 2 и 3. Фиг.1 - блок-схема электрической зубной щетки согласно первому варианту осуществления. Фиг.2 - вид в разрезе, иллюстрирующий внутреннюю конфигурацию электрической зубной щетки по первому варианту осуществления. Фиг.3 - вид в перспективе, иллюстрирующий внешний вид электрической зубной щетки.
Электрическая зубная щетка включает в себя корпус 1 электрической зубной щетки (в дальнейшем просто называемый “корпус 1”) и чистящий элемент 2. Корпус 1 включает в себя наружный несущий элемент 1a и внутренний несущий элемент 1b. Чистящий элемент 2 прикреплен к внутреннему несущему элементу 1b корпуса 1.
Наружный несущий элемент 1a корпуса 1 образован полимерным кожухом, имеющим по существу цилиндрическую форму. В наружном несущем элементе 1a имеются эластомерный участок 14 для захватывания и переключатель S. При чистке зубов участок 14 для захватывания удерживается рукой пользователя. Выключатель S используется для включения и выключения и переключения режимов.
В наружном несущем элементе 1a корпуса 1 имеются двигатель 10, являющийся источником движения, управляющая схема 12, аккумулятор 13, являющийся источником питания на 2, 4В, перезаряжающаяся катушка (не показана) и тому подобное. При подзарядке аккумулятора 13 только корпус 1 помещается на зарядное устройство 100 для подзарядки аккумулятора 13 бесконтактным способом с помощью электромагнитной индукции. Управляющая схема 12 включает в себя ЦПУ (блок обработки входного/выходного сигнала) 120, выполняющий различные рода операции/управление, память 121, хранящая программу и различные установочные значения, таймер 122 и тому подобное.
Датчик ускорения
В корпусе 1 обеспечивается датчик 15 ускорения. В качестве датчика 15 ускорения может использоваться многокоординатный датчик ускорения или однокоординатный датчик ускорения. Как показано на фиг.3, трехкоординатный датчик ускорения установлен таким образом, что ось X параллельна поверхности щетки, ось Y соответствует продольному направлению корпуса 1, а ось Z перпендикулярна поверхности щетки. При использовании в настоящем документе термин “поверхность щетки” означает воображаемую плоскость, которая по существу перпендикулярна щетинкам (волокнам) щетки и расположена на участках переднего конца щетинок. В случае однокоординатного датчика ускорения датчик ускорения может располагаться таким образом, чтобы определять ускорение по оси Z или по оси X на фиг. 3. В первом варианте осуществления используется трехкоординатный, x, y и z, датчик ускорения. Выходной сигнал датчика 15 ускорения вводится в ЦПУ 120 и используется для определения пространственного положения щетки.
В качестве датчика 15 ускорения может быть предпочтительно использован датчик пьезорезистивного типа, емкостного типа или типа MEMS для обнаружения по тепловому излучению. Поскольку датчик MEMS очень мал по размеру, он легко монтируется в корпус 1. Однако, датчик 15 ускорения не ограничивается датчиком MEMS. Например, в качестве датчика 15 ускорения может использоваться датчик электродинамического типа, тензометрический датчик или датчик пьезоэлектрического типа. Хотя это специально не показано на чертежах, может обеспечиваться корректирующая цепь для коррекции баланса между чувствительностью датчика по осям, температурных характеристик чувствительности, температурного дрейфа и тому подобного. Может обеспечиваться полосовой фильтр (фильтр нижних частот) для устранения динамической компоненты ускорения и шума. Шум может быть уменьшен путем сглаживания формы выходных сигналов датчика ускорения.
Приводной механизм щетки
Внутренний несущий элемент 1b корпуса 1 является компонентом, который прикреплен к наружному несущему элементу 1a, оставаясь относительно подвижным. Внутренний несущий элемент 1b включает в себя стержень 3, выполненный таким образом, что он выступает из отверстия со стороны переднего конца (со стороны щетки) наружного несущего элемента 1a. Чистящий элемент 2 установлен таким образом, чтобы при этом покрывался стержень 3. Щетка 20 вставлена в передний конец чистящего элемента 2. Поскольку чистящий элемент 2 является расходной деталью, он выполнен с возможностью прикрепляться съемным образом к стержню 3 (к внутреннему несущему элементу 1b), чтобы его можно было заменить новым чистящим элементом.
Стержень 3, выполненный из полимерного материала, является элементом трубчатой формы с закрытым дистальным концом (концевой участок на щеточном конце), и стержень 3 включает в себя подшипник 32 на дистальном конце внутри трубки. Дистальный конец вала 30 эксцентрика, присоединенный к валу 11 поворота двигателя 10, вставлен в подшипник 32 стержня 3. Вал 30 эксцентрика имеет груз 31 вблизи подшипника 32, и центр тяжести вала 30 эксцентрика смещен от его центра поворота. Когда ЦПУ 120 подает сигнал приведения в действие (например, сигнал широтно-импульсной модуляции) на двигатель 10 соответственно режиму работы для поворота вала 11 поворота двигателя 10, вал 30 эксцентрика также поворачивается в соответствии с вращением вала 11 поворота, и, поскольку центр тяжести вала 30 эксцентрика смещен, вал эксцентрика крутится вокруг центра поворота. Таким образом, дистальный конец вала 30 эксцентрика многократно сталкивается с внутренней стенкой подшипника 32, вызывая высокоскоростную вибрацию (перемещение) щетки 20. Таким образом, двигатель 10 играет роль средства привода для вибрации (перемещения) щетки, а вал 30 эксцентрика играет роль механизма передачи движения (механизма преобразования движения) для преобразования выходного движения (поворота) двигателя 10 в вибрацию щетки 20.
Поворотный механизм чистящего элемента
Электрическая зубная щетка по первому варианту осуществления включает в себя привод (средство поворота) 40 для относительного поворота чистящего элемента 2 относительно наружного несущего элемента 1a корпуса 1 для изменения ориентации щетки 20 относительно оси Y. Фиг.4A и 4B иллюстрируют конфигурацию привода 40. Фиг.4A - вид в разрезе, выполненный по линии X-X фиг.4B.
Привод 40 образован двигателем ротационного типа, включающего в себя статор 41 и ротор 42. Статор 41 неподвижно закреплен на наружном несущем элементе 1a корпуса 1, а ротор 42 неподвижно закреплен на кожухе 43 двигателя 10. Когда на привод 40 подается управляющий сигнал от ЦПУ 120, ротор 42 поворачивается на угол, соответствующий управляющему сигналу. В первом варианте осуществления предполагается, что угол поворота ротора 42 находится в диапазоне от -180 градусов до +180 градусов. Кожух 43 двигателя и двигатель 10 поворачиваются вместе с поворотом ротора 42, и внутренний несущий элемент 1b, неподвижно прикрепленный к валу 11 поворота двигателя 10, также поворачивается. В результате чистящий элемент 2 поворачивается на желательный угол относительно корпуса 1, что позволяет изменять ориентацию щетки 20. При использовании в настоящем документе термин “ориентация щетки” означает направление, перпендикулярное поверхности щетки, то есть направление кончика щетки, а термин “изменение ориентации щетки” означает, что изменился угол поворота ориентации щетки относительно оси Y.
Известен двигатель ротационного типа, такой как шаговый двигатель, который может предпочтительно использоваться в качестве привода 40. Например, поскольку необходимо получить только поворот, в качестве привода 40 может использоваться линейный двигатель цилиндрического типа, включающий в себя дуговой статор.
Как описано выше, электрическая зубная щетка по первому варианту осуществления включает в себя два вида приводов, а именно двигатель 10, который перемещает (вызывает вибрацию) щетки 20, и привод 40, который управляет ориентацией (углом наклона щетки) щетки 20. Чтобы отличить их друг от друга, термин "двигатель 10" относится к приводу, приводящему в движение щетку, а термин "привод 40" относится к приводу, управляющему углом наклона щетки.
Работа электрической зубной щетки
Прилипание остатков пищи или зубной бляшки зависит от вида зуба (такого, как зуб верхней/нижней челюсти и моляр/резец), или участка (такого, как язычная сторона/щечная сторона, зубная поверхность/окклюзионная поверхность и зубодесневой карман), и эффективный угол наклона щетки является различным для каждой области. Даже для одинаковых зубов способ наложения щетки изменяется на 180 градусов для правой и левой сторон зубного ряда.
Следовательно, в электрической зубной щетке по первому варианту осуществления очищаемый участок оценивается на основании положения щетки, определенного датчиком 15 ускорения, а привод 40 управляется таким образом, чтобы угол наклона щетки становился для очищаемой области оптимальным.
В первом варианте осуществления, как представлено на фиг.5, верхние и нижние зубные ряды разделены на 16 областей, а именно, переднюю щечную сторону верхней челюсти, переднюю язычную сторону верхней челюсти, левую щечную сторону верхней челюсти, левую язычную сторону верхней челюсти, левую окклюзионную поверхность верхней челюсти, правую щечную сторону верхней челюсти, правую язычную сторону верхней челюсти, правую окклюзионную поверхность верхней челюсти, переднюю щечную сторону нижней челюсти, переднюю язычную сторону нижней челюсти, левую щечную сторону нижней челюсти, левую язычную сторону нижней челюсти, левую окклюзионную поверхность нижней челюсти, правую щечную сторону нижней челюсти, правую язычную сторону нижней челюсти и правую окклюзионную поверхность нижней челюсти. Однако, деление зубного ряда не ограничивается первым вариантом осуществления, и зубные ряды могут быть разделены более грубо или более точно.
Автоматический процесс управления углом наклона щетки подробно описывается со ссылкой на блок-схемы фиг.6-9.
Фиг.6 - блок-схема основного алгоритма, а фиг.7-9 - блок-схемы, иллюстрирующие подробные этапы обработки согласно основному алгоритму. ЦПУ 120, который является средством управления, выполняет следующие этапы обработки согласно программе, если не указано иначе.
Когда электрическая зубная щетка включается, ЦПУ 120 управляет двигателем 10 для начала перемещения щетки 20 (S10). Следующие этапы обработки от S20 до S60 выполняются многократно с постоянными временными интервалами. Когда электрическая зубная щетка отключается, или когда непрерывное время работы, измеренное таймером, достигает заданного времени (например, две минуты), цикл S20-S60 заканчивается (этапы обработки продолжены?: НЕТ), и ЦПУ 120 останавливает перемещение щетки 20 (S70).
S20: Определение положения
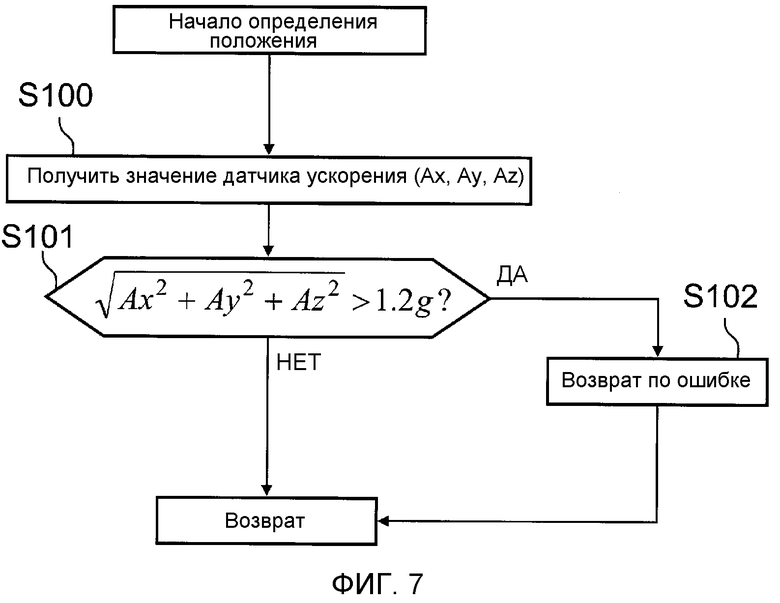
На этапе S20 ЦПУ 120 определяет положение корпуса электрической зубной щетки на основании выходного сигнала датчика 15 ускорения. Фиг.7 - блок-схема обработки определения положения (S20).
ЦПУ 120 получает выходные сигналы Ax, Ay и Az для координат x, y, z от датчика 15 ускорения (S100). Ax выражает компоненту ускорения в x-направлении, Ay выражает компоненту ускорения в y-направлении, а Az выражает компоненту ускорения в z-направлении. Когда зубная щетка находится в состоянии покоя (когда динамическое ускорение не действует на датчик 15 ускорения), результирующий вектор А, состоящий из компонент Ax, Ay, Az, соответствует ускорению свободного падения. В настоящем документе А=(Ax, Ay, Az) называется вектором положения.
Когда вектор положения А=(Ax, Ay, Az) больше 1,2g (g обозначает ускорение свободного падения) (ДА на этапе S101), то выдается ошибка (S102). Это связано с тем, что, когда компонента динамического ускорения в значительной степени включена в выходные сигналы датчика ускорения, направление ускорения свободного падения (то есть пространственное положение щетки) нелегко определить точно. Вместо выдачи ошибки, как на этапе S102, процессы S100 и S101 могут повторяться до тех пор, пока не будут получены выходные сигналы Ax, Ay, Az датчика ускорения с результирующим вектором не более 1,2g. Пороговое значение определения ошибки не ограничено 1,2g и может принимать другие значения.
S30: Оценка очищаемой области
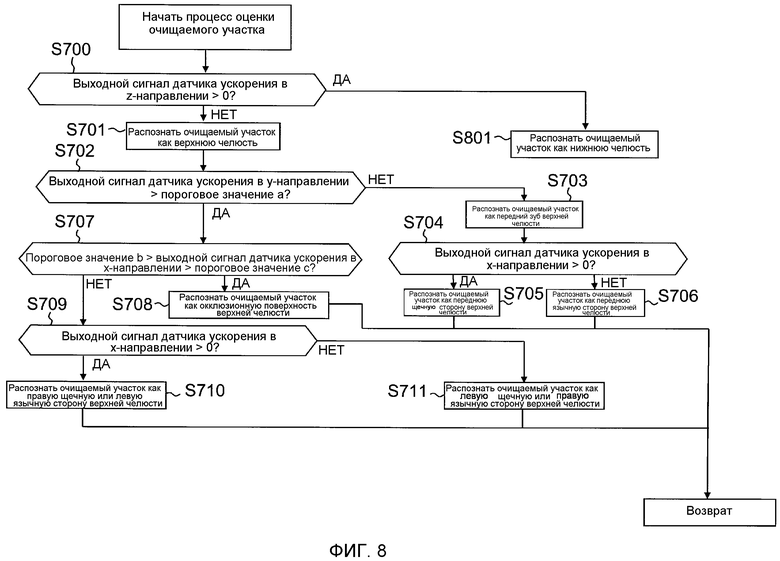
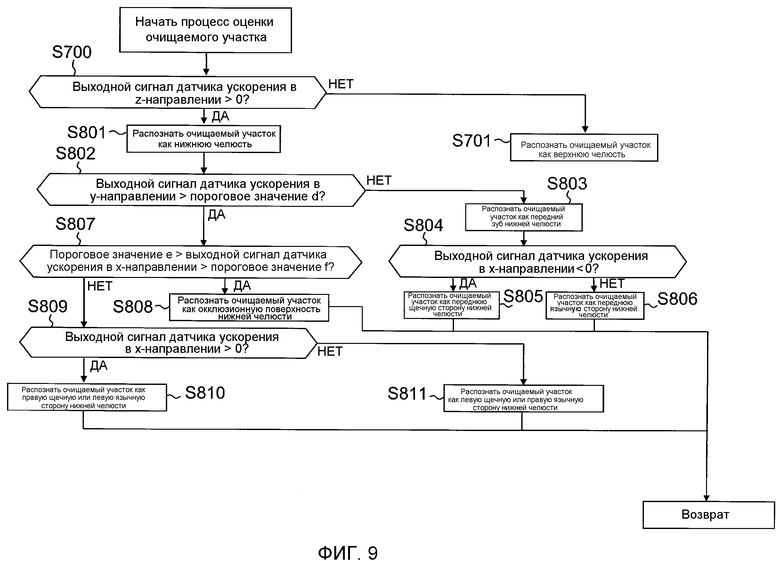
Фиг.8 и 9 - блок-схемы обработки оценки очищаемой области (S20). На фиг.10 и 11 - виды, показывающие примеры выходных сигналов Ax, Ay, Az датчика ускорения для каждой очищаемой области.
ЦПУ 120 определяет, находится ли участок на верхней челюсти или на нижней челюсти, на основании выходного сигнала Az датчика ускорения в z-направлении (S700). Определение основано на том факте, что при чистке зубного ряда верхней челюсти поверхность щетки в значительной степени повернута вверх, а при чистке зубного ряда нижней челюсти в значительной степени повернута вниз. Очищаемый участок определяется как находящийся на нижней челюсти при Az>0(S801), и как находящийся на верхней челюсти при Az≤0(S701).
(1) Для верхней челюсти
ЦПУ 120 определяет, действительно ли участок является передним зубом, на основании выходного сигнала Ay датчика ускорения в y-направлении (S702). Определение основано на том факте, что корпус 1 зубной щетки относительно горизонтален при чистке переднего зуба, но неизбежно наклоняется при чистке моляра из-за контакта с губами. Очищаемый участок определяется как передний зуб верхней челюсти при Ay ≤ порогового значения a (S703).
В случае, когда участок определен как передний зуб верхней челюсти, ЦПУ 120 определяет, является ли участок щечной стороной или язычной стороной, на основании выходного сигнала Ax датчика ускорения в x-направлении (S704). Определение основано на том факте, что ориентация щетки меняется на противоположную при переходе со щечной стороны на язычную сторону. Очищаемый участок определяется как передняя щечная сторона верхней челюсти при Ax>0(S705), и как передняя язычная сторона верхней челюсти при Ax≤0(S706).
При этом, в случае, когда на этапе S702 определено, что очищаемый участок не является передним зубом верхней челюсти, ЦПУ 120 определяет, является ли очищаемый участок окклюзионной поверхностью, на основании выходного сигнала Ax датчика ускорения в x-направлении (S707). Определение основывается на том факте, что поверхность щетки становится по существу горизонтальной, что максимально уменьшает выходной сигнал Ax при чистке окклюзионной поверхности. Определение, является ли очищаемый участок левой окклюзионной поверхностью верхней челюсти или правой окклюзионной поверхностью верхней челюсти, выполняется, когда пороговое значение b>Ax> пороговое значение c (S708). В первом варианте осуществления левая окклюзионная поверхность верхней челюсти и правая окклюзионная поверхность верхней челюсти особенно не отличаются друг от друга. Это происходит из-за того, что чистка окклюзионной поверхности справа и слева почти не требует изменений.
Когда Ax ≥ пороговое значение b или Ax ≤ пороговое значение c, ЦПУ 120 определяет, является ли очищаемый участок щечной стороной или язычной стороной, на основании того, является ли Ax больше или меньше 0 (S709). Определение основано на том факте, что ориентация щетки меняется на противоположную при переходе со щечной стороны на язычную сторону. Очищаемый участок определяется как правая щечная сторона верхней челюсти или левая язычная сторона верхней челюсти при Ax>0(S710), и как левая щечная сторона верхней челюсти или правая язычная сторона верхней челюсти при Ax≤0(S711). В первом варианте осуществления правая щечная сторона верхней челюсти и левая язычная сторона верхней челюсти особенно не отличаются друг от друга. Это связано с тем, что для правой щечной области верхней челюсти и левой язычной области верхней челюсти почти нет необходимости в изменении угла наклона щетки и тому подобного. То же справедливо для левой щечной стороны верхней челюсти и правой язычной стороны верхней челюсти.
(2) Для нижней челюсти
ЦПУ 120 определяет, действительно ли участок является передним зубом, на основании выходных сигналов Ay датчика ускорения в y-направлении (S802). Определение основано на том факте, что корпус 1 зубной щетки относительно горизонтален при чистке переднего зуба, но неизбежно наклоняется при чистке моляра из-за контакта с губами. Очищаемый участок определяется как передний зуб верхней челюсти при Ay ≤ пороговое значение a (S803).
В случае, когда очищаемый участок определен как передний зуб нижней челюсти, ЦПУ 120 определяет, является ли очищаемый участок щечной стороной или язычной стороной, на основании выходного сигнала Ax датчика ускорения в x-направлении (S804). Определение основано на том факте, что ориентация щетки меняется на противоположную при переходе со щечной стороны на язычную сторону. Очищаемый участок определяется как передняя щечная сторона нижней челюсти при Ax<0(S805) и как передняя язычная сторона нижней челюсти при Ax≥0(S806).
При этом, в случае, когда на этапе S802 определено, что очищаемый участок не является передним зубом нижней челюсти, ЦПУ 120 определяет, является ли очищаемый участок окклюзионной поверхностью, на основании выходного сигнала Ax датчика ускорения в x-направлении (S807). Определение основано на том факте, что очищаемая поверхность становится по существу горизонтальной, что максимально уменьшает выходной сигнал Ax при чистке окклюзионной поверхности. Участок определяется как правая щечная сторона нижней челюсти или левая язычная сторона нижней челюсти при Ax>0(S808). В первом варианте осуществления левая окклюзионная поверхность нижней челюсти или правая окклюзионная поверхность нижней челюсти по существу не отличаются друг от друга. Это происходит из-за того, что для окклюзионной поверхности чистка справа и слева почти не требует изменения положения щетки.
При Ax ≥ пороговое значение e, или Ax ≤ пороговое значение f ЦПУ 120 определяет, является ли очищаемый участок щечной стороной или язычной стороной, в зависимости от того, является ли Ax больше или меньше 0 (S809). Определение основывается на том факте, что при переходе со щечной стороны на язычную сторону ориентация щетки изменяется на противоположную. Очищаемый участок определяется как правая щечная сторона нижней челюсти или левая язычная сторона нижней челюсти при Ax>0(S810), и как левая щечная сторона нижней челюсти или правая язычная сторона нижней челюсти при Ax≤0(S811). В первом варианте осуществления правая щечная сторона нижней челюсти и левая язычная сторона нижней челюсти по существу не отличаются друг от друга. Это происходит из-за того, что почти отсутствует необходимость в изменении угла наклона щетки и прочего при переходе с правой щечной области нижней челюсти на левую язычную сторону нижней челюсти. Это справедливо для левой щечной стороны нижней челюсти и правой язычной стороны нижней челюсти.
С помощью вышеописанных этапов обработки очищаемый в настоящее время участок определяется как один из передней щечной стороны верхней челюсти (S705), передней язычной стороны верхней челюсти (S706), окклюзионной поверхности верхней челюсти (S708), правой щечной стороны верхней челюсти или левой язычной стороны верхней челюсти (S710), левой щечной стороны верхней челюсти или левой язычной стороны верхней челюсти (S711), передней щечной стороны нижней челюсти (S805), передней язычной стороны нижней челюсти (S806), окклюзионной поверхности нижней челюсти (S808), правой щечной стороны нижней челюсти или левой язычной стороны нижней челюсти (S810), и левой щечной стороны нижней челюсти или правой язычной стороны нижней челюсти (S811).
Вышеописанный алгоритм определения приведен только в качестве примера. Может использоваться любой алгоритм определения при условии, что очищаемый участок может быть идентифицирован по выходным сигналам Ax, Ay, Az датчика ускорения. Например, не только значения Ax, Ay, Az используются как переменные для непосредственного определения, но также для определения могут использоваться и вторичные переменные, полученные, соответственно, сочетанием Ax, Ay, Az. Например, вторичные переменные могут быть произвольно установлены равными Ay/Az, Ax·Ax+Ay·Ay, Az-Ax. Альтернативно, очищаемый участок может быть определен после того, как информация об ускорении по осям Ax, Ay, Az преобразуется в информацию об углах (углах положения) α, β, γ, как показано на фиг.12. В примере на фиг.12 угол оси x относительно направления ускорения свободного падения определяется как угол крена α, угол оси Y относительно направления ускорения свободного падения определяется как угол тангажа β, а угол оси Z относительно направления ускорения свободного падения определяется как угол рыскания γ. Пороговые значения, используемые для определения, могут быть определены из результатов клинического эксперимента.
S40-S60: Регулировка угла наклона щетки
На этапе S40 ЦПУ 120 оценивает имеющийся угол наклона щетки на основании положения (выходного сигнала датчика ускорения), определенного на этапе S200. Угол наклона щетки - это угол относительно оси зуба (ось проходит через коронку и корень зуба), под которым щетка упирается в зуб. Однако, при обработке оценки на этапе S40 угол наклона щетки вычисляется в предположении, что угол поворота внутреннего несущего элемента 1b, установленный приводом 40, составляет 0 градусов, а ось зуба совпадает с направлением силы тяжести. При этом предполагается, что угол наклона щетки находится в диапазоне от 0 градусов до 90 градусов.
Угол наклона щетки может быть оценен, например, по компоненте ускорения Az в направлении z. Как показано на фиг. 13, значение Az значительно изменяется в зависимости от угла наклона щетки, таким образом, что Az по существу равен нулю в случае, когда угол наклона щетки составляет приблизительно 90 градусов, и таким образом, что значение Az увеличивается по мере уменьшения угла наклона щетки. Поскольку компонента ускорения Ax в направлении x также изменяется в зависимости от угла наклона щетки, предпочтительно оценивать угол наклона щетки по Ax, а не по Az, или оценивать угол наклона щетки и по Ax и по Az (направление результирующего вектора Ax и Az). Угол наклона щетки может вычисляться как непрерывная величина или дискретная величина, такая как от 0 градусов до 10 градусов, и от 10 градусов до 20 градусов.
Верхний вид на фиг.14 показывает состояние, когда угол наклона щетки равен 0 градусов, средний вид на фиг.14 показывает состояние, когда угол наклона щетки - 45 градусов, а нижний вид на фиг.14 показывает состояние, когда угол наклона щетки - 90 градусов. При чистке окклюзионной поверхности угол наклона щетки предпочтительно устанавливается равным приблизительно 0 градусов. Для эффективного вычищения остатков пищи и бляшки из пародонтального кармана или межзубного промежутка щетка, предпочтительно, может перемещаться таким образом, чтобы кончик щетки заходил в зубодесневой карман и межзубный промежуток, и предпочтительно, угол наклона щетки устанавливается равным около 45 градусов. С другой стороны, когда угол наклона щетки устанавливается равным 90 градусов, к плоскости зуба прилагается наибольшая сила, удаляющая зубную бляшку.
Таким образом, оптимальный угол наклона щетки может быть установлен в зависимости от очищаемой области или желательного результата чистки. В первом варианте осуществления оптимальное значение угла наклона щетки устанавливается равным 0 градусов для окклюзионной поверхности верхней челюсти и окклюзионной поверхности нижней челюсти, оптимальное значение угла наклона щетки устанавливается равным 45 градусам для правой щечной стороны верхней челюсти, левой язычной стороны верхней челюсти, левой щечной стороны верхней челюсти, правой язычной стороны верхней челюсти, правой щечной стороны нижней челюсти, левой язычной стороны нижней челюсти, левой щечной стороны нижней челюсти и правой язычной стороны нижней челюсти, а оптимальное значение угла наклона щетки устанавливается равным 90 градусам для передней щечной стороны верхней челюсти, передней язычной стороны верхней челюсти, передней щечной стороны нижней челюсти и передней язычной стороны нижней челюсти. Установленные значения сохраняются в памяти 121. Вышеописанное оптимальное значение угла наклона щетки описано только в качестве примера. Оптимальное значение может быть установлено любым способом, или, предпочтительно, пользователь может устанавливать желательное значение в качестве оптимального значения. Альтернативно, множество заданных значений, например, для режима удаления зубной бляшки или режима чистки зубодесневого кармана подготавливаются заранее, при этом оптимальное значение 45 градусов может автоматически устанавливаться в очищаемом участке, за исключением окклюзионной поверхности, когда пользователь выбирает режим удаления зубной бляшки, а оптимальное значение 90 градусов может автоматически устанавливаться в очищаемом участке, за исключением окклюзионной поверхности, когда пользователь выбирает режим чистки зубодесневого кармана.
На этапе S50 ЦПУ 120 сравнивает текущее значение угла наклона щетки, полученное на этапе S40, с оптимальным значением угла наклона щетки в очищаемом участке, полученном на этапе S30, и ЦПУ 120 определяет, является ли угол наклона щетки правильным. Когда оптимальное значение определяется одним значением, таким как 45 градусов, необходимо только оценить разность между текущим значением и оптимальным значением. Когда оптимальное значение определено диапазоном значений, таким как 40-50 градусов, необходимо только оценить, находится ли текущее значение в диапазоне значений.
Если определяется, что угол наклона щетки не является правильным (НЕТ на этапе S50), ЦПУ 120 регулирует угол наклона щетки (S60). Конкретно, ЦПУ 120 вычисляет разность между оптимальным значением и текущим значением, чтобы послать управляющий сигнал, соответствующий разности (углу), на привод 40, и таким образом поворачивает чистящий элемент 2. Следовательно, ориентация щетки 20 регулируется таким образом, чтобы угол наклона щетки принял оптимальное значение.
Как описано выше, согласно конфигурации первого варианта осуществления, чистящий элемент 2 автоматически поворачивается согласно положению электрической зубной щетки, чтобы довести угол наклона щетки до оптимального значения, так, чтобы правильный угол наклона щетки можно было легко воспроизвести во время чистки для получения хорошего результата чистки.
Второй вариант осуществления
На фиг.15 показана конфигурация электрической зубной щетки согласно второму варианту осуществления настоящего изобретения. Второй вариант осуществления отличается от первого варианта осуществления тем, что между наружным несущим элементом 1а и внутренним несущим элементом 1b обеспечивается подшипник 44. При такой конфигурации улучшается стабильность положения внутреннего несущего элемента 1b. Поскольку положение внутреннего несущего элемента 1b стабилизировано, длина привода 40 в направлении оси может быть уменьшена, таким образом способствуя уменьшению размера корпуса электрической зубной щетки 1.
Третий вариант осуществления
На фиг.16 представлена конфигурация электрической зубной щетки согласно третьему варианту осуществления настоящего изобретения. В первом и втором вариантах осуществления двигатель 10 обеспечивается электроэнергией через электропровод. Однако, в третьем варианте осуществления двигатель 10 обеспечивается электроэнергией от управляющей схемы 12 через блок 45 электрического соединения.
В конфигурациях первого и второго вариантов осуществления, в которых двигатель 10 и управляющая схема 12 соединены электропроводом, необходимо ограничивать диапазон поворота привода 40, чтобы не допустить перекручивания или разрыва электропровода. С другой стороны, участок 45 электрического соединения третьего варианта осуществления имеет такую конфигурацию схемы, что электрическое соединение между линией подачи электропитания на управляющую схему и электродом двигателя 10 сохранялось независимо от угла поворота привода 40. Например, когда привод 40 поворачивается на 360 градусов или больше, может предпочтительно использоваться конфигурация третьего варианта осуществления.
На фиг.17 схематично показана конфигурация схемы, использующая контактную щетку в качестве примера участка 45 электрического соединения. В конфигурации схемы на фиг.17 электропитание может подаваться на двигатель 10 со стороны управляющей схемы 12 независимо от положения контакта контактной щетки (независимо от взаиморасположения внутреннего несущего элемента 1b и внешнего несущего элемента 1a) таким образом, чтобы ток I передавался через двигатель 10 в постоянном направлении.
На фиг.18 схематично представлена конфигурация схемы, использующая катушку, в качестве примера участка 45 электрического соединения. В конфигурации схемы на фиг.18 электрод может подводиться к двигателю 10 со стороны управляющей схемы 12 путем электромагнитной индукции.
Четвертый вариант осуществления
В четвертом варианте осуществления осуществляется функция информирования о том, что угол наклона щетки имеет оптимальное значение. В частности, когда на этапе S50 фиг.6 угол наклона щетки определяется как правильный, ЦПУ 120 вызывает излучение света светоизлучающим элементом (таким как светодиод), имеющийся во внешнем несущем элементе 1a. Видя световое излучение светоизлучающего элемента, пользователь может легко понять, что угол наклона щетки имеет оптимальное значение.
При этом предпочтительно изменять способ информирования (такой как цвет светового излучения и характер вспыхивания) в зависимости от разности между имеющимся значением угла наклона щетки, полученным на этапе S40, и оптимальным значением для очищаемой области, полученным на этапе S30. Следовательно, случай, когда регулировки угла наклона щетки с помощью привода 40 не требуется (правильное положение корпуса 1), и случай, когда угол наклона щетки регулируется с помощью привода 40 (неправильное положение корпуса 1) отличаются друг от друга, чтобы пользователь мог понять правильное положение.
В дополнение к использованию света в качестве способа информирования может использоваться, например, звук, вибрация, голос и тому подобное. При использовании звука в зависимости от разности могут изменяться громкость и характер звука. При использовании вибрации в зависимости от разности могут изменяться сила и продолжительность вибрации. При использовании голоса может выдаваться сообщение следующего содержания: “Наклоните приблизительно на 30 градусов”, “Наклоните немного”, и “оптимальный угол наклона щетки”.
Пятый вариант осуществления
В пятом варианте осуществления помимо угла наклона щетки согласно определенному положению изменяется направление перемещения щетки (конкретно, направление поворота двигателя 10) и частота перемещений щетки (конкретно, число оборотов двигателя 10). В пятом варианте осуществления остальные конфигурации подобны конфигурациям в вышеописанных вариантах осуществления. Следовательно, ниже главным образом описывается конфигурация, характерная для пятого варианта осуществления.
Характеристики вибрации
В электрической зубной щетке, как описано выше, вибрация щетки создается путем использования поворотного перемещения вала эксцентрика, и щетка 20 вибрирует в плоскости, перпендикулярной оси вращения двигателя 10, описывая эллипсоидную орбиту. Изобретатели наблюдали и анализировали вибрацию щетки при изменении количества вибраций (числа оборотов двигателя), и изобретатели обнаружили следующую особенность вибрации электрической зубной щетки.
(1) Чистящий участок имеет по меньшей мере две точки резонанса (резонансных частоты).
(2) Резонансные направления отличаются друг от друга в каждой точке резонанса. Конкретно, как показано на фиг.19, амплитуда в направлении оси X, параллельной поверхности щетки, увеличивается в резонансной точке (первый резонанс: приблизительно 12500 колебаний в минуту) со стороны низкого числа вибраций. Амплитуда в направлении оси Z, перпендикулярной поверхности щетки, увеличивается в резонансной точке (второй резонанс: приблизительно 38000 колебаний в минуту) со стороны низкого числа вибраций. Щетка описывает орбиту (приблизительно 45 градусов), наклоненную к оси X (оси Z) вне резонанса (например, приблизительно 26500 колебаний в минуту).
Причина возникновения множества резонансных точек, имеющих различные направления, объясняется тем, что резонансные точки в значительной степени зависят от структуры или принципа привода электрической зубной щетки. Изобретатели неоднократно выполняли эксперименты с изменением конфигурации вала эксцентрика и щетки, и изобретатели установили, что первая резонансная точка - это характеристика, зависящая главным образом от механизма передачи движения, тогда как вторая резонансная точка - это характеристика, зависящая главным образом от щетки. Другими словами, установлено, что число вибраций и амплитуда первой резонансной точки могут регулироваться путем изменения конструкции или формы (вкратце, например, положения, размера и веса груза вала эксцентрика) механизма передачи движения, и установлено, что число вибраций и амплитуда второй резонансной точки могут регулироваться путем изменения конструкции или формы щетки.
Верхний вид на фиг.20 иллюстрирует состояние при угле наклона щетки, равном 45 градусам, а нижний вид на фиг.20 иллюстрирует состояние при угле наклона щетки 90 градусов. Слева на фиг.20 представлено состояние нормального вращения двигателя, а справа на фиг.20 представлено состояние вращения двигателя в обратном направлении. Каждая стрелка указывает движение щетки (направление наибольшей амплитуды). Грубо говоря, щетка перемещается горизонтально (в направлении оси X) в первом резонансе, щетка перемещается вертикально (в направлении оси Z) во втором резонансе, и щетка перемещается наклонно вне резонанса.
При эффективном вычищении остатков пищи или зубной бляшки из зубодесневого кармана или межзубного промежутка, предпочтительно щетка перемещается таким образом, чтобы кончик щетки проникал в зубодесневой карман или межзубный промежуток. Таким образом, предпочтительно направление перемещения щетки наклонено к оси зуба (например, под 45 градусов). Соответственно, как может быть видно из примера на фиг.20, перемещение во втором резонансе оптимально для угла наклона щетки 45 градусов. С другой стороны, для угла наклона щетки 90 градусов перемещение вне резонанса при нормальном вращении двигателя оптимально на правой язычной стороне нижней челюсти, а движение вне резонанса при обратном вращении двигателя оптимально на правой щечной стороне нижней челюсти. Аналогично, оптимальный рабочий режим (направление вращения двигателя и число вибраций щетки) можно определить для каждой комбинации очищаемого участка и угла наклона щетки.
Фиг.21 - блок-схема обработки переключения режима работы. Например, обработка переключения режима работы выполняется после этапа S60 на фиг.6.
ЦПУ 120 сравнивает очищаемый участок, полученный на этапе S30, и угол наклона щетки (или оптимальное значение угла наклона щетки), полученный на этапе S40, с очищаемым участком и углом наклона щетки при предыдущей обработке, чтобы проверить, изменились ли очищаемый участок или угол наклона щетки (S1800). Очищаемый участок и угол наклона щетки, полученные при предыдущей обработке, сохраняются в памяти.
Когда очищаемый участок или угол наклона щетки изменяются (ДА на этапе S1800), ЦПУ 120 определяет, к какой группе - первой, состоящей из левой щечной стороны нижней челюсти, правой язычной стороны нижней челюсти, левой язычной стороны верхней челюсти и правой щечной стороны верхней челюсти, или второй, состоящей из правой щечной стороны нижней челюсти, левой язычной стороны нижней челюсти, правой язычной стороны верхней челюсти, правой язычной стороны верхней челюсти и левой щечной стороны верхней челюсти, соответствует текущий очищаемый участок (S1801). Когда текущий очищаемый участок соответствует первой группе, ЦПУ 120 вращает двигатель в нормальном направлении (S1802). Когда текущий очищаемый участок соответствует второй группе, ЦПУ 120 вращает двигатель в обратном направлении (S1803). ЦПУ 12 устанавливает число вибраций щетки на второй резонанс (высокая скорость), когда угол наклона щетки составляет 45 градусов (S1804 и S1805), и ЦПУ 12 устанавливает число вибраций щетки вне резонанса (промежуточная скорость), когда угол наклона щетки составляет 90 градусов (S1806).
Как описано выше, согласно регулировке по пятому варианту осуществления, основанной на информации об очищаемом участке и угле наклона щетки, для дальнейшего увеличения силы удаления зубной бляшки может быть реализовано движение кончика щетки, наиболее подходящее для чистки межзубного промежутка или зубодесневого кармана.
В пятом варианте осуществления регулируются и направление движения щетки и частота движений щетки. Альтернативно, предпочтительно регулируется или направление движения щетки, или частота движения щетки. Например, частота движения уменьшается для ослабления чистящей силы в области, где десна является чувствительной, и частота движения увеличивается для усиления чистящей силы в области, в которой желателен высокий очищающий эффект. Следовательно, может быть достигнуто улучшение результата чистки и лечения. Поскольку вибрирующий механизм зубной щетки симметричен относительно yz-плоскости, щетка описывает симметричную орбиту относительно yz-плоскости, когда направление вращения двигателя меняется на противоположное. Следовательно, направление вращения двигателя изменяется в зависимости от очищаемого участка таким образом, чтобы кончик щетки перемещался в направлении, в котором зубная бляшка вычищается из зубодесневого кармана.
Шестой вариант осуществления
В конфигурации согласно шестому варианту изобретения очищаемый участок и угол наклона щетки оцениваются с помощью однокоординатного датчика ускорения.
Верхний вид на фиг.22 показывает состояние, в котором чистится зубная поверхность на щечной или язычной стороне. При этом угол наклона щетки (угол рыскания γ) составляет приблизительно 90 градусов, компонента ускорения свободного падения в направлении оси X составляет приблизительно 1 g, или -1 g (положительные и отрицательные знак соответствует правой и левой стороне зубного ряда), и компонента ускорения свободного падения в направлении оси Z является по существу нулевой. С другой стороны, нижний вид на фиг. 22 показывает состояние, в котором чистится окклюзионная поверхность. При этом угол наклона щетки (угол рыскания γ) становится по существу нулевым, компонента ускорения свободного падения в направлении оси X становится по существу нулевой, и компонента ускорения свободного падения в направлении оси Z становится равной приблизительно 1g, или -1g (положительный и отрицательный знак соответствует правой и левой стороне зубного ряда).
При использовании вышеописанной характеристики, определение, является ли очищаемый участок зубной поверхностью на щечной или язычной стороне, или окклюзионной поверхностью, и определение их принадлежности к верхней или нижней челюсти, или к правой или левой стороне, может быть сделано только с помощью датчика ускорения по оси X или датчиком ускорения по оси Z. Аналогично другим вариантам осуществления угол наклона щетки может быть вычислен по выходному сигналу датчика ускорения по оси X или по оси Z. Обработка после оценки очищаемого участка и угла наклона щетки подобна таковой в других вариантах осуществления.
Седьмой вариант осуществления
Электрическая зубная щетка согласно седьмому варианту осуществления имеет автоматическую функцию возврата, согласно которой после использования электрической зубной щетки чистящий элемент возвращается в исходное положение. Другие конфигурации подобны таковым в других вариантах осуществления.
Как представлено на блок-схеме на фиг.23, когда электрическая зубная щетка выключена путем манипуляции с выключателем, или когда непрерывное время работы, измеренное таймером, достигает заданного времени (например, две минуты), цикл S20 - S60 заканчивается (этапы обработки продолжаются?: НЕТ), и двигатель щетки останавливается (S70). Затем, на этапе S230 ЦПУ 120 управляет приводом 40 для возврата угла наклона чистящего элемента 2 (ориентации щетки) в исходное положение (начальное положение). В седьмом варианте осуществления состояние, в котором поверхность щетки ориентирована в ту же сторону, что и выключатель S на корпусе электрической зубной щетки (см. фиг.2), определяется как исходное положение.
Согласно функции автоматического возврата седьмого варианта осуществления, даже если чистка зубов закончена, а ориентация щетки отклонена от исходного положения, ориентация щетки автоматически возвращается к исходному положению до начала следующей чистки зубов. Следовательно, когда начинается следующая чистка зубов, угол наклона щетки может быстро достигать оптимального значения.
Предпочтительно регулировка выполняется таким образом, чтобы чистящий элемент возвращался к исходному положению при определении того, что электрическая зубная щетка помещена на зарядное устройство 100. С учетом возможности возобновления чистки зубов сразу после выключения или автоматической остановки таймером чистящий элемент предпочтительно возвращается к исходному положению по прошествии заданного времени (например, одна минута) после выключения.
В седьмом варианте осуществления обработка автоматического возврата выполняется после окончания использования электрической зубной щетки. Однако, подобный результат получается, даже если обработка автоматического возврата выполняется после начала использования электрической зубной щетки (например, когда электрическая зубная щетка включена или когда электрическая зубная щетка снимается с зарядного устройства 100).
Другие примеры
Конфигурации вариантов осуществления настоящего изобретения описаны только в качестве примера. Объем настоящего изобретения не ограничен вариантами осуществления и могут быть выполнены различные модификации без отступления от объема технического замысла настоящего изобретения. Например, конфигурации вариантов осуществления предпочтительно объединяются. В вариантах осуществления электрическая зубная щетка имеет способ вибрации, в котором в качестве примера используется эксцентрически расположенный груз. Однако, настоящее изобретение может быть применено к электрической зубной щетке, в которой используется другой способ движения. Например, настоящее изобретение может быть применено к электрическим зубным щеткам, в которых предусмотрено вращательное возвратно-поступательное движение, линейное возвратно-поступательное перемещение, вращательное движение щетинок щетки, и их сочетания, которые могут переключаться. Настоящее изобретение может применяться не в электрической зубной щетке аккумуляторного типа, а в электрической зубной щетке на батарейках и электрической зубной щетке со шнуром питания.
Для дальнейшего увеличения точности обнаружения положения щетки и точности оценки очищаемого участка или угла наклона щетки предпочтительно величина перемещения щетки относительно эталонного положения и относительное положение вычисляются на основе выходного сигнала датчика ускорения и гироскопа. Что касается эталонного положения, то в качестве эталонного может быть установлено положение в момент включения, или может обеспечиваться механизм (например, пользователь нажимает выключатель, держа горизонтально корпус зубной щетки, упирая щетку в переднюю щечную сторону верхней челюсти), с помощью которого пользователь вводит эталонное положение (исходное положение при чистке). Величина перемещения (расстояние перемещения может быть вычислено с помощью производной второго порядка компоненты динамического ускорения в каждом из направления по оси X, направления по оси Y и направления по оси Z, полученной на основании выходного сигнала датчика ускорения. Однако, при вычислении величины перемещения система координат XYZ зубной щетки преобразуется в систему координат X'Y'Z', в которой направление ускорения свободного падения совмещено с осью Z' (предпочтительно, эталонное положение совмещается с началом координат). Например, каждая величина перемещения по осям X', Y', Z' вычисляется и накапливается на каждом такте, чтобы иметь возможность определить относительное положение относительно эталонного положения (начального положения). Когда относительное положение относительно эталонного положения определено, очищаемый участок может быть идентифицирован более корректно и более подробно, чем в других вариантах осуществления. Предпочтительно положение щетки вычисляется путем использования информации об ориентации, полученной от магнитного датчика и тому подобного. Для выделения компоненты динамического ускорения из выходного сигнала датчика ускорения может использоваться полосовой фильтр, такой как фильтр высоких частот. При этом для устранения шума от вибрации щетки предпочтительно вырезается частотный компонент от приблизительно 100 Гц до приблизительно 300 Гц. Предпочтительно величина перемещения и направление перемещения более корректно вычисляется в сочетании с гироскопом. Что касается переднего зуба, поскольку положение щетки переворачивается на 180 градусов согласно тому, какая рука, правая или левая, держит корпус зубной щетки, пользователь регистрирует ведущую руку (рука, которой он держит зубную щетку), и алгоритм определения для очищаемой области или режима работы (направление вращения двигателя и движения щетки) может изменяться согласно зарегистрированной ведущей руке.
Полость рта отображается с помощью компактной камеры, обеспеченной в участке переднего конца чистящего элемента 2, и для обнаружения положения щетки может быть использована графическая информация. В участке переднего конца чистящего элемента 2 обеспечиваются температурный датчик или оптический датчик, и результат обнаружения может быть использован при определении положения щетки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2445938C1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2444325C1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2010 |
|
RU2518532C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОЛОСТИ РТА БЕЗ ПОМОЩИ РУК | 2010 |
|
RU2542777C2 |
| ЭЛЕТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА С ДАТЧИКОМ ДАВЛЕНИЯ | 2013 |
|
RU2657956C2 |
| СПОСОБ ГИГИЕНИЧЕСКОЙ ОБРАБОТКИ ПОЛОСТИ РТА И ИНСТРУМЕНТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2123822C1 |
| Устройство и способ для очищения поверхности зубов | 2019 |
|
RU2731109C1 |
| СИСТЕМА И СПОСОБ УХОДА ЗА ПОЛОСТЬЮ РТА | 2017 |
|
RU2712406C1 |
| КОНФИГУРАЦИЯ ЩЕТИНЫ | 2010 |
|
RU2462971C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ПРЕДОСТАВЛЕНИЯ ОБРАТНОЙ СВЯЗИ О СЕАНСЕ ЧИСТКИ | 2016 |
|
RU2721510C2 |
Изобретение относится к электрической зубной щетке. Изобретение направлено на создание зубной щетки, позволяющей точно определять оптимальный для чистки зубов угол наклона щетки относительно зуба. Электрическая зубная щетка включает в себя корпус 1 электрической зубной щетки, включающий в себя участок 14 для захватывания; чистящий элемент 2, включающий в себя щетку 20; двигатель 10, перемещающий щетку 20; привод 40, поворачивающий чистящий элемент 2 относительно корпуса 1 электрической зубной щетки для изменения ориентации щетки 20; датчик 15 ускорения, обнаруживающий положение корпуса 1; и ЦПУ 120, который, на основании определенного положения, управляет приводом 40 таким образом, чтобы угол наклона щетки принял заданное оптимальное значение. 6 з.п. ф-лы, 23 ил.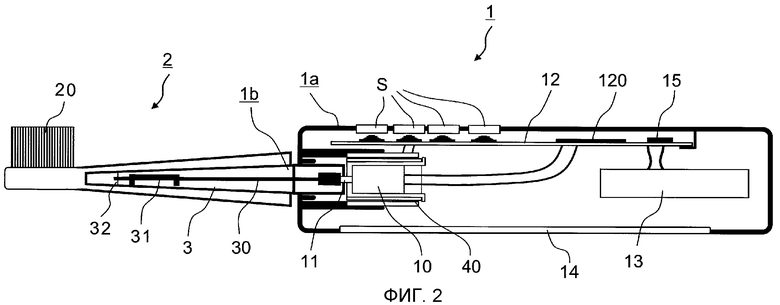
1. Электрическая зубная щетка, содержащая: корпус электрической зубной щетки, включающий в себя участок для захватывания; чистящий элемент, включающий в себя щетку; средство привода для перемещения щетки; средство поворота для относительного поворота чистящего элемента относительно корпуса электрической зубной щетки для изменения ориентации щетки; средство обнаружения положения для определения положения корпуса электрической зубной щетки; и средство управления для управления средством поворота таким образом, чтобы угол наклона щетки, который является углом наклона щетки относительно оси зуба, принял заданное оптимальное значение, основанное на определенном положении.
2. Электрическая зубная щетка по п.1, в которой средство управления включает в себя: средство оценки участка для оценки, на основании определенного положения, очищаемого в настоящее время участка из множества участков, образованных путем деления поверхности зубного ряда; средство оценки угла наклона щетки для оценки, на основании определенного положения, угла наклона щетки, являющегося углом наклона щетки относительно оси зуба, и оптимальное значение угла наклона щетки, ранее заданное для каждого очищаемого участка, и определенный угол наклона щетки сравниваются для управления средством поворота таким образом, чтобы угол наклона щетки принял оптимальное значение.
3. Электрическая зубная щетка по п.1 или 2, в которой средство управления управляет средством привода таким образом, чтобы направление движения или частота движения щетки изменялись согласно определенному положению.
4. Электрическая зубная щетка по п.1 или 2, в которой средство обнаружения положения определяет положение на основании выходного сигнала датчика ускорения.
5. Электрическая зубная щетка по п.1 или 2, дополнительно содержащая средство информирования для сообщения, что угол наклона щетки имеет оптимальное значение.
6. Электрическая зубная щетка по п.1 или 2, в которой оптимальное значение является изменяемым.
7. Электрическая зубная щетка по п.1 или 2, в которой средство управления управляет средством поворота таким образом, чтобы чистящий элемент располагался в заданном исходном положении после использования электрической зубной щетки, или после начала использования электрической зубной щетки.
| WO 2006137648 A1, 28.12.2006 | |||
| US 2003115693 A1, 26.06.2003 | |||
| US 2007294847 A1, 27.12.2007 | |||
| JP 2000507464 A, 20.06.2000. |

