ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к электрической зубной щетке.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известен тип электрической зубной щетки, когда зубы чистятся (удаляются остатки пищи и бляшки) путем размещения на зубах щетки, которая вибрирует или вращается с высокой скоростью. В последнее время появился продукт с дополнительными функциями, имеющий функции, позволяющие переключать режим работы щетки (число колебаний, характер вибрации и т.д.). В такой электрической зубной щетке надлежащий угол наклона щетки (угол, образованный щеткой и осью зуба) и режим работы рекомендуется выбирать в соответствии с местом чистки. Например, при чистке пародонтального кармана (между зубом и десной) кончик щетинки щетки легко входит в пародонтальный карман, если щетка расположена под углом 45 градусов относительно оси зуба и, следовательно, эффективна при удалении бляшки. При чистке боковой поверхности зуба (зубной поверхности) щетка должна располагаться под углом 90 градусов относительно оси зуба, при этом желательно выбирать режим работы, при котором раздражение десны будет небольшим.
В патентном документе 1 предлагается способ определения положения и перемещения щетки с использованием датчика ускорения, датчика магнитного поля Земли и датчика угловой скорости, и оценивающие качество операции по чистке, выполняемой пользователем.
ДОКУМЕНТ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЙ ДОКУМЕНТ
Патентный документ 1: Международная публикация №2006/137648 (публикация японской нерассмотренной патентной заявки №2008-543418).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Авторы настоящего изобретения представляют новую разработку "умной" электрической зубной щетки, имеющей функцию определения ориентации основного корпуса зубной щетки при помощи датчика ориентации и автоматического переключения на надлежащий режим работы согласно результату определения. Авторы настоящего изобретения обнаружили следующие проблемы в этом процессе. Для удобства объяснения проблемы будут описаны путем использования функции переключения на режим работы, подходящий для чистки пародонтального кармана, когда угол наклона щетки, для примера, составляет 45 градусов.
При условии переключения на режим работы для чистки пародонтального кармана только когда угол наклона щетки составляет точно 45 градусов, выставление угла и поддержание угла пользователем являются затруднительными. Поэтому в реальном изделии установлен допустимый диапазон ±10 градусов, и когда угол наклона щетки лежит в диапазоне между 35 градусами и 55 градусами, выполняется управление по переключению на режим работы для пародонтального кармана. В этом случае когда пользователь поворачивает основной корпус зубной щетки таким образом, что кончик щетинки щетки обращен к пародонтальному карману, то есть таким образом, что угол наклона щетки приближается к 45 градусам, режим работы переключается, когда угол наклона щетки становится больше 35 градусов (или когда угол наклона щетки становится меньше 55 градусов). Для продолжения чистки в режиме работы для пародонтального кармана пользователю необходимо поддерживать угол наклона щетки в пределах вышеуказанного диапазона. Однако угол наклона щетки иногда выходит за рамки вышеуказанного диапазона при изменении положения при чистке (перемещение щетки к пародонтальному карману другого зуба). Более того, поскольку вибрация источника привода (двигателя или тому подобного) щетки накладывается на выходной сигнал датчика в качестве шумовой составляющей, значение угла наклона щетки может колебаться из-за этого вибрационного шума и может выходить за рамки диапазона. В частности, когда угол наклона щетки находится вблизи граничных значений вышеуказанного диапазона (35 градусов, 55 градусов), режим работы часто переключается и становится нестабильным. Более того, поскольку звук работы и вибрация, передаваемые руке, часто изменяются при переключении режимов работы, пользователь может испытывать ощущение неудобства.
Настоящее изобретение выполнено с учетом вышеуказанных проблем, и его целью является обеспечение способа подавления частого переключения режимов работы, вызываемого вибрацией источника привода или тому подобного в электрической зубной щетке, в которой режим работы переключается автоматически согласно ориентации.
СРЕДСТВА ДЛЯ РЕШЕНИЯ ПРОБЛЕМЫ
Для достижения вышеуказанной цели в настоящем изобретении применяется следующая конфигурация. А именно, электрическая зубная щетка по настоящему изобретению включает в себя основной корпус электрической зубной щетки, включающий в себя источник привода щетки; датчик ориентации для определения ориентации основного корпуса электрической зубной щетки; и средство управления для переключения режима работы электрической зубной щетки в зависимости от результата сравнения значения ориентации, которое представляет собой значение, вычисленное по выходному сигналу датчика ориентации, с предварительно установленным пороговым значением; причем первое пороговое значение, используемое для определения переключения из первого режима работы во второй режим работы, и второе пороговое значение, используемое для определения переключения из второго режима работы в первый режим работы, установлены различными.
Согласно такой конфигурации интервал (зазор), соответствующий разнице первого порогового значения и второго порогового значения, обеспечивается на границе переключения первого режима работы и второго режима работы. Этот интервал вызывает поглощение колебания значения ориентации вблизи границы, так чтобы явление частого переключения режимов работы могло подавляться.
Первое пороговое значение и второе пороговое значение предпочтительно устанавливаются таким образом, чтобы разница стала больше, чем максимальное значение диапазона колебания значения ориентации, вызванного вибрацией источника привода. Путем установки такого значения для интервала переключение режимов работы, вызываемое вибрацией (шумом) источника привода, можно максимально предотвратить.
В частности, первое пороговое значение предпочтительно больше, чем второе пороговое значение; и средство управления предпочтительно переключает первый режим работы на второй режим работы, когда во время первого режима работы значение ориентации превышает первое пороговое значение, и переключает второй режим работы на первый режим работы, когда во время второго режима работы значение ориентации становится меньше, чем второе пороговое значение.
Первое пороговое значение предпочтительно больше, чем второе пороговое значение; и средство управления предпочтительно переключает первый режим работы на второй режим работы, когда состояние, при котором значение ориентации выходит за пределы первого порогового значения, сохраняется в течение заданного времени во время первого режима работы, и переключает второй режим работы на первый режим работы, когда во время второго режима работы состояние, при котором значение ориентации становится меньше, чем второе пороговое значение, сохраняется в течение заданного времени.
Датчик ориентации предпочтительно представляет собой датчик ускорения, а значение ориентации является функцией выходного значения датчика ускорения.
Каждое средство и процессы, описанные выше, могут объединяться друг с другом, насколько это возможно, для создания конфигурации настоящему изобретению.
РЕЗУЛЬТАТ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению обеспечивается электрическая зубная щетка, отличающаяся удобством использования, которое способствует чистке зубов при надлежащем угле наклона щетки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
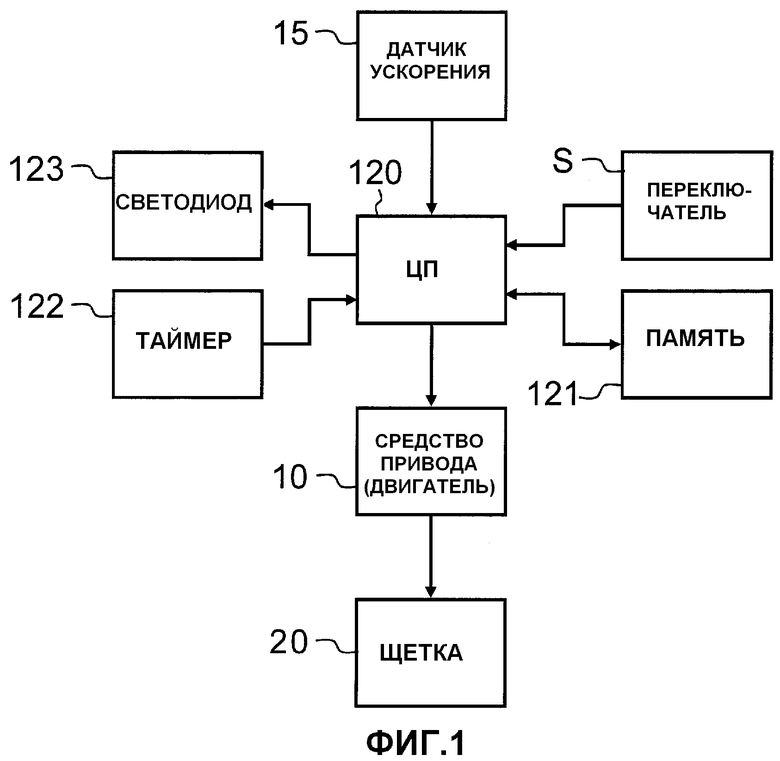
Фиг.1 - блок-схема электрической зубной щетки.
Фиг.2 - вид в разрезе, представляющий внутреннюю конфигурацию электрической зубной щетки.
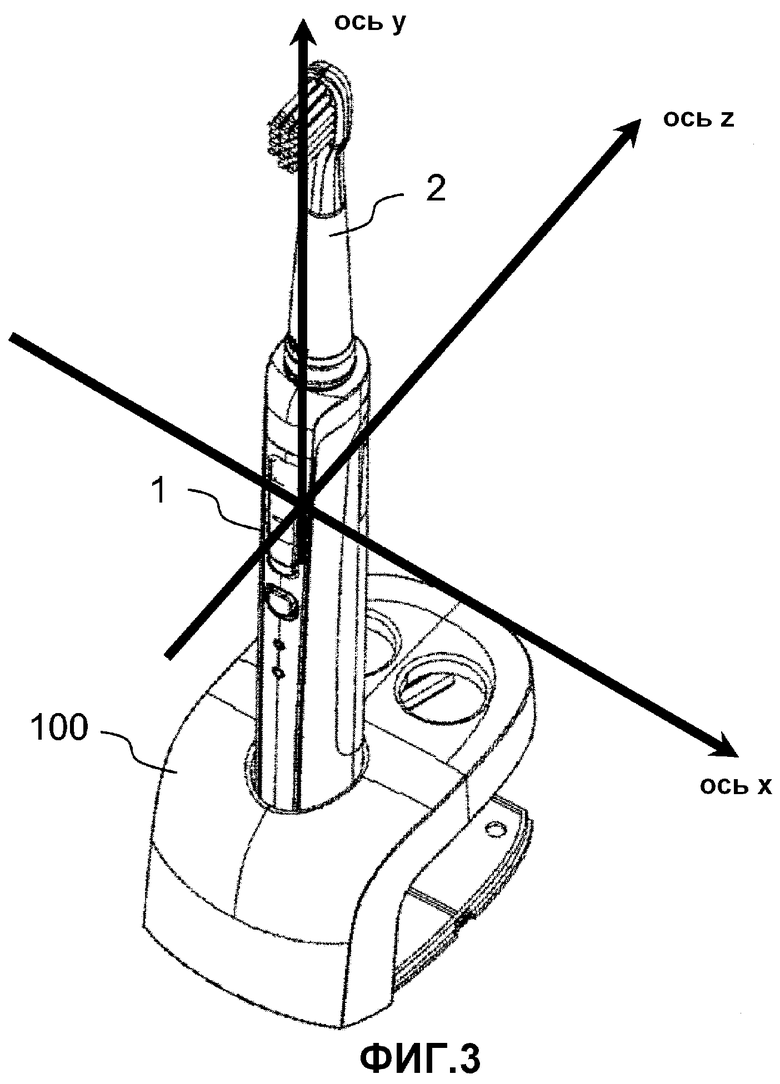
Фиг.3 - вид в перспективе, представляющий внешний вид электрической зубной щетки.
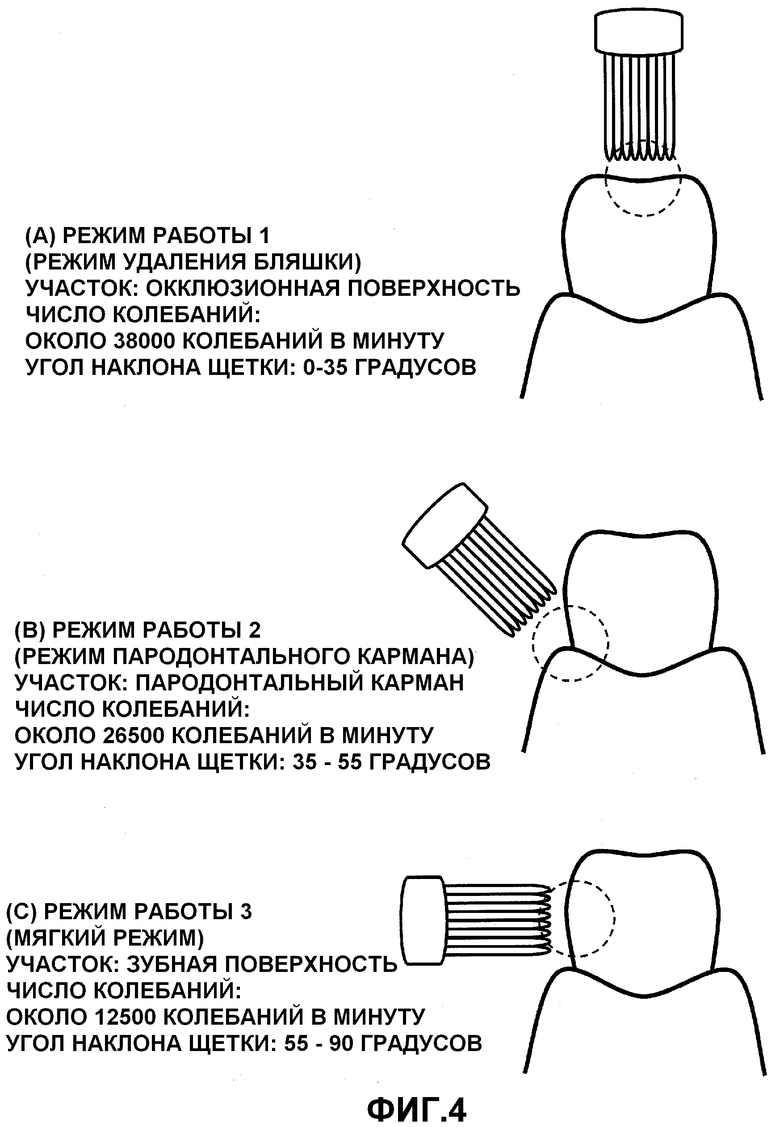
Фиг.4A-4C - виды, описывающие режимы работы.
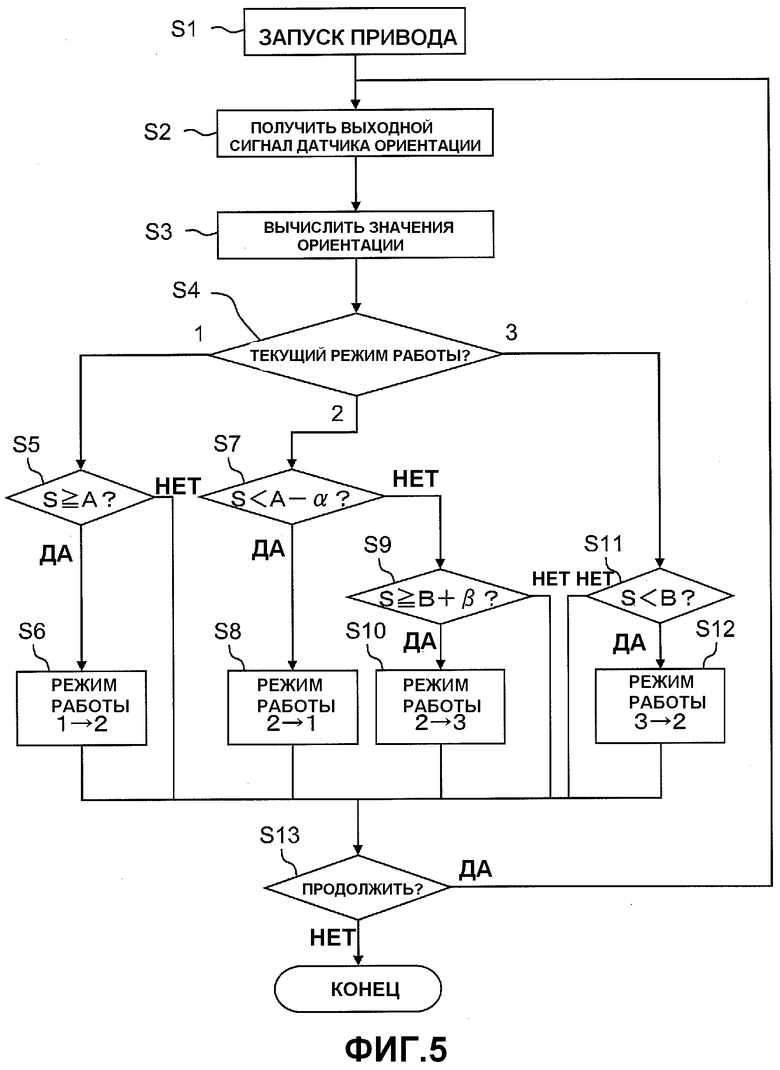
Фиг.5 - блок-схема, представляющая основной алгоритм работы электрической зубной щетки.
Фиг.6 - вид, описывающий формулу вычисления угла наклона зубной щетки и значения ориентации.
Фиг.7A - вид, описывающий управление переключением режима работы по настоящему варианту осуществления, и
Фиг.7B - вид, описывающий сравнительный пример.
Фиг.8A - вид, описывающий вариант управления переключением режима работы по настоящему варианту осуществления, а фиг.8B - вид, описывающий сравнительный пример.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее будут в качестве иллюстрации подробно описаны предпочтительные варианты осуществления настоящего изобретения со ссылками на чертежи.
Конфигурация электрической зубной щетки
Конфигурация электрической зубной щетки будет описана со ссылкой на фиг.1, фиг.2 и фиг.3. Фиг.1 является блок-схемой электрической зубной щетки по настоящему варианту осуществления, фиг.2 является видом в разрезе, представляющим внутреннюю конфигурацию электрической зубной щетки, а фиг.3 является видом в перспективе, представляющим внешний вид электрической зубной щетки.
Электрическая зубная щетка включает в себя основной корпус 1 электрической зубной щетки (здесь и далее также именуемой просто "основной корпус 1") и чистящий элемент 2, прикрепляемый к основному корпусу 1.
Оболочка основного корпуса 1 выполнена из полимерного материала и имеет по существу цилиндрическую форму. Основной корпус 1 включает в себя участок 16 для захвата, который пользователь захватывает рукой для чистки зубов, переключатель S для включения/отключения питания и для переключения режимов, LED 123 и тому подобное.
Внутри основного корпуса 1 расположены двигатель 10, являющийся источником привода, схема 12 возбуждения, аккумуляторная батарея 13, являющаяся источником питания напряжением 2,4 В, зарядная катушка 14 и тому подобное. При зарядке аккумуляторной батареи 13 основной корпус 1 просто помещается на зарядное устройство 100, обеспечивая зарядку бесконтактным способом посредством электромагнитной индукции. Схема 12 возбуждения включает в себя ЦП (устройство обработки ввода-вывода) 120 для выполнения различных типов вычислений и управления, память 121 для хранения программ и различных типов установленных значений, таймер 122 и тому подобное.
Датчик ускорения
Датчик 15 ускорения, служащий в качестве датчика ориентации, расположен внутри основного корпуса 1. В качестве датчика 15 ускорения может использоваться многоосевой датчик ускорения или одноосевой датчик ускорения. Как представлено на фиг.3, в случае использования трехосевого датчика ускорения ось Х параллельна чистящей поверхности, ось Y совпадает с продольным направлением основного корпуса 1, а ось Z расположена перпендикулярно чистящей поверхности. Чистящая поверхность представляет собой воображаемую плоскость, которая по существу перпендикулярна щетине (волоскам) щетки и которая располагается на дистальном концевом участке щетины. В случае когда используется одноосевой датчик ускорения, одноосевой датчик ускорения может располагаться таким образом, что определяется ускорение по оси Z или по оси X, показанные на фиг.3. В настоящем варианте осуществления используется трехосевой датчик ускорения по осям X, Y, Z. Выходной сигнал датчика 15 ускорения вводится в ЦП 120 и используется для определения пространственной ориентации электрической зубной щетки.
В качестве датчика 15 ускорения предпочтительно используется датчик MEMS пьезорезисторного типа, емкостного типа или теплового типа. Это происходит потому, что датчик MEMS является очень маленьким и легко монтируется внутрь основного корпуса 1. Однако вид датчика 15 ускорения этим не ограничивается, и могут использоваться датчики электродинамического типа, деформационного типа или пьезоэлектрического типа. Хотя это специально не проиллюстрировано, может быть вмонтирована корректирующая цепь для коррекции баланса чувствительности датчика по каждой оси, температурной чувствительности, температурного дрейфа и тому подобного. Может быть вмонтирован полосовой фильтр (фильтр низких частот) для удаления динамических компонент ускорения и шума или фильтр для удаления (снижения) вибрационного шума двигателя. Более того, шум может быть снижен путем сглаживания формы выходного сигнала датчика ускорения.
Приводной механизм щетки
Основной корпус 1 включает в себя стержень 3, расположенный таким образом, чтобы он выступал наружу из отверстия на стороне дистального конца (чистящей стороны) оболочки. Чистящий элемент 2 прикреплен таким образом, чтобы покрывать стержень 3. Щетка 20 вставлена на дистальном конце чистящего элемента 2. Чистящий элемент 2 является расходным товаром и поэтому выполнен с возможностью свободного прикрепления и отсоединения от стержня 3 таким образом, что он может заменяться на новый элемент.
Стержень 3 представляет собой трубчатый элемент, выполненный из полимерного материала, в котором дистальный конец (конец на чистящей стороне) является закрытым и включает в себя подшипник 32 на дистальном конце внутренней поверхности трубки. Дистальный конец вала 30 эксцентрика, соединенный с валом 11 вращения двигателя 10, вставлен в подшипник 32 стержня 3. Вал 30 эксцентрика включает в себя груз 31 вблизи подшипника 32, и центр тяжести вала 30 эксцентрика смещен от его центра вращения. Когда ЦП 120 подает сигнал возбуждения (например, сигнал широтно-импульсной модуляции), соответствующий режиму работы, на двигатель 10 для вращения вала 11 вращения двигателя 10, вал 30 эксцентрика также вращается с вращением вала 11 вращения, но совершает круговое движение вокруг центра вращения, поскольку центр тяжести вала 30 эксцентрика смещен. Следовательно, дистальный конец вала 30 эксцентрика регулярно совершает микроскопические столкновения относительно внутренней стенки подшипника 32, что вызывает вибрацию (перемещение) щетки 20 с высокой скоростью. То есть двигатель 10 служит средством привода для вибрации (перемещения) щетки, а вал 30 эксцентрика служит механизмом передачи движения (механизм преобразования движения), преобразующим выходное перемещение (вращение) двигателя 10 в вибрацию щетки 20.
Работа электрической зубной щетки
Как представлено на фиг.4A, фиг.4B и фиг.4C, электрическая зубная щетка по настоящему варианту осуществления имеет три режима работы. В такой электрической зубной щетке ориентация (в частности, угол наклона щетки) основного корпуса зубной щетки определяется с помощью датчика 15 ускорения, и режим переключается автоматически на надлежащий режим работы в соответствии со значением угла наклона щетки. Следует заметить, что "spm" представляет собой единицу измерения, означающую число колебаний в минуту.
(А) Режим работы 1 (режим удаления бляшки). Режим пригоден для чистки окклюзионной поверхности, при которой достигается наибольшая сила удаления бляшки. Число колебаний: около 38000 в минуту. Угол наклона щетки: 0-35 градусов.
(В) Режим работы 2 (режим пародонтального кармана). Режим пригоден для чистки пародонтального кармана. Число колебаний: около 26500 в минуту. Угол наклона щетки: 35-55 градусов.
(С) Режим работы 3 (мягкий режим). Режим пригоден для чистки зубной поверхности, в которой раздражение десны является малым. Число колебаний: около 12500 в минуту. Угол наклона щетки: 55-90 градусов.
На фиг.5 представлена блок-схема, показывающая основной алгоритм работы электрической зубной щетки. Процессы, описанные ниже, являются процессами, выполняемыми посредством ЦП 120 в соответствии с программой, если специально не оговорено другое.
При включении питания электрической зубной щетки ЦП 120 управляет двигателем 10, запуская привод щетки 20 (S1). Если режим работы, используемый перед этим, сохранен в памяти, привод запускается в этом режиме работы. Выполнение дальнейших процессов S2-S13 регулярно повторяется в течение каждого постоянного промежутка времени. При отключении питания электрической зубной щетки или когда время непрерывной работы, отсчитываемое таймером, достигает заданного времени (например, двух минут), цикл S2-S13 заканчивается (S13: НЕТ) и ЦП 120 прекращает привод щетки 20.
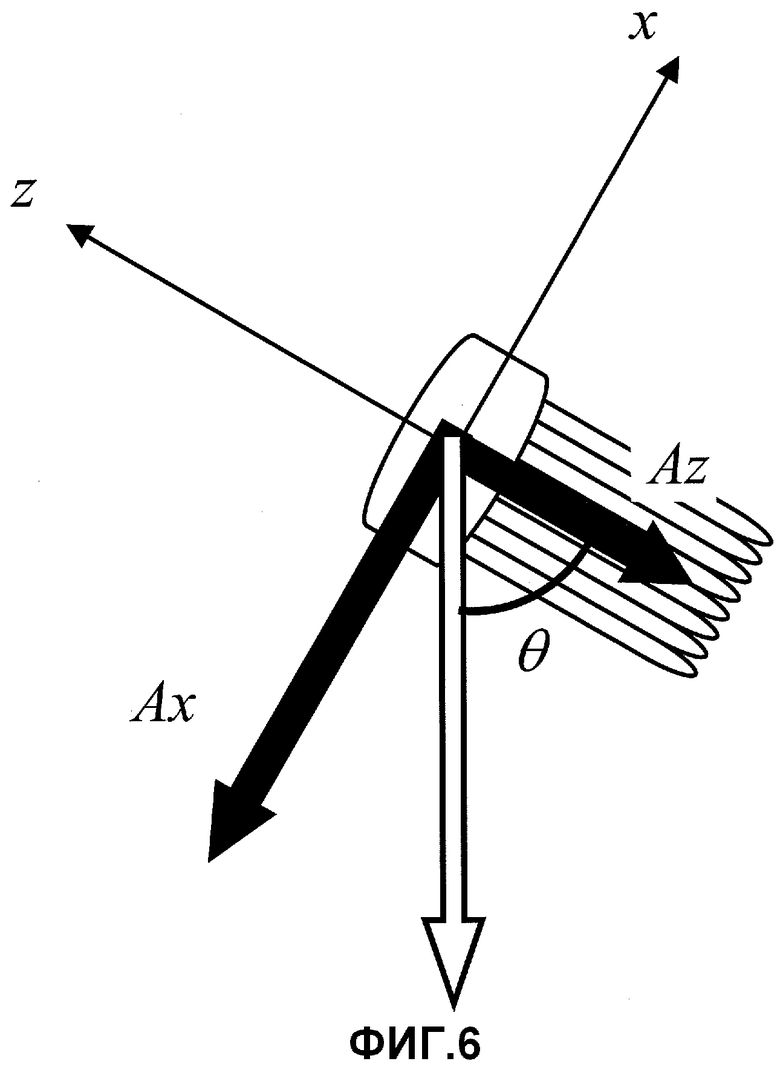
На этапе S2 ЦП 120 получает выходной сигнал датчика 15 ускорения и вычисляет значение ориентации S, характеризующее ориентацию (угол наклона щетки 0) основного корпуса зубной щетки на этапе S3. В настоящем варианте осуществления, как представлено на фиг.6, значение ориентации S вычисляется по следующей формуле, в предположении, что ось зуба параллельна направлению силы тяжести. То есть значение ориентации S является функцией от выходного значения Ax датчика ускорения по оси X и от выходного значения Az датчика ускорения по оси Z.
Угол наклона щетки θ=tg-1(|Ax/Az|)
Значение ориентации S=tg θ=|Ax/Az|
Затем ЦП 120 разветвляет процесс в зависимости от текущего режима работы (S4).
(1) В случае когда текущим режимом работы является "1", ЦП 120 сравнивает значение ориентации S с пороговым значением A (в данном примере A=tg 35 градусов) (S5). Если S≥A, то есть если угол наклона щетки выходит за пределы 35 градусов, режим работы переключается с 1 на 2 (S6). Если S<A, то есть если угол наклона щетки меньше 35 градусов, продолжается работа в режиме 1.
(2) В случае когда текущим режимом работы является "3", ЦП 120 сравнивает значение ориентации S с пороговым значением B (в данном примере B=tg 55 градусов) (S11). Если S<B, то есть если угол наклона щетки меньше 55 градусов, режим работы переключается с 3 на 2 (S12). Если S≥B, то есть если угол наклона щетки больше или равен 55 градусам, продолжается работа в режиме 3.
(3) В случае когда текущим режимом работы является "2", ЦП 120 сравнивает значение ориентации S с пороговым значением A-α (S7). В настоящем документе α является параметром для разнесения порогового значения, (A) используемого при определении переключения из режима работы 1 в режим работы 2, и порогового значения (A-α), используемого при определении переключения из режима работы 2 в режим работы 1, и для него устанавливается значение, удовлетворяющее условию A-α=tg 34 градусов в настоящем примере. На этапе S7, если S<A-α, то есть если угол наклона щетки меньше 34 градусов, ЦП 120 переключает режим работы со 2 на 1 (S8). Если S≥A-α, то есть если угол наклона щетки больше или равен 34 градусам, выполняется определение этапа S9.
На этапе S9 ЦП 120 сравнивает значение ориентации S с пороговым значением B+β. В настоящем документе β является параметром для разнесения порогового значения (B+β), используемого при определении переключения из режима работы 2 в режим работы 3, и порогового значения (B), используемого при определении переключения из режима работы 3 в режим работы 2, и для него устанавливается значение, удовлетворяющее условию B+β=tg 56 градусов в настоящем примере. На этапе S9, если S≥B+β, то есть если угол наклона щетки выходит за пределы 56 градусов, ЦП 120 переключает режим работы со 2 на 3 (S10). Если S<B+β, то есть если угол наклона щетки лежит в диапазоне между 34 градусами и 56 градусами, продолжается работа в режиме 2.
Преимущества настоящего варианта осуществления
Как описано выше, в электрической зубной щетке по настоящему варианту осуществления режим работы переключается автоматически для обеспечения надлежащего режима работы в соответствии с ориентацией, определенной датчиком. Другими словами, если угол наклона щетки меньше приблизительно 35 градусов, предполагается, что проводится чистка окклюзионной поверхности и выбирается режим работы 1, при котором сила удаления бляшки является наибольшей, а если угол наклона щетки больше чем приблизительно 55 градусов, предполагается, что проводится чистка зубной поверхности и выбирается режим работы 3, при котором раздражение десны является незначительным. Если угол наклона щетки лежит в диапазоне приблизительно 35-55 градусов, предполагается, что проводится чистка пародонтального кармана и выбирается режим работы 2, подходящий для чистки пародонтального кармана. Поскольку чистка пародонтального кармана является особенно важной в предупреждении заболеваний пародонта и тому подобного, предпочтительно оповестить пользователя, что угол наклона щетки является надлежащим (приблизительно 45 градусов), путем зажигания светодиода LED 123 или испускания оповещающего звука во время работы в режиме 2.
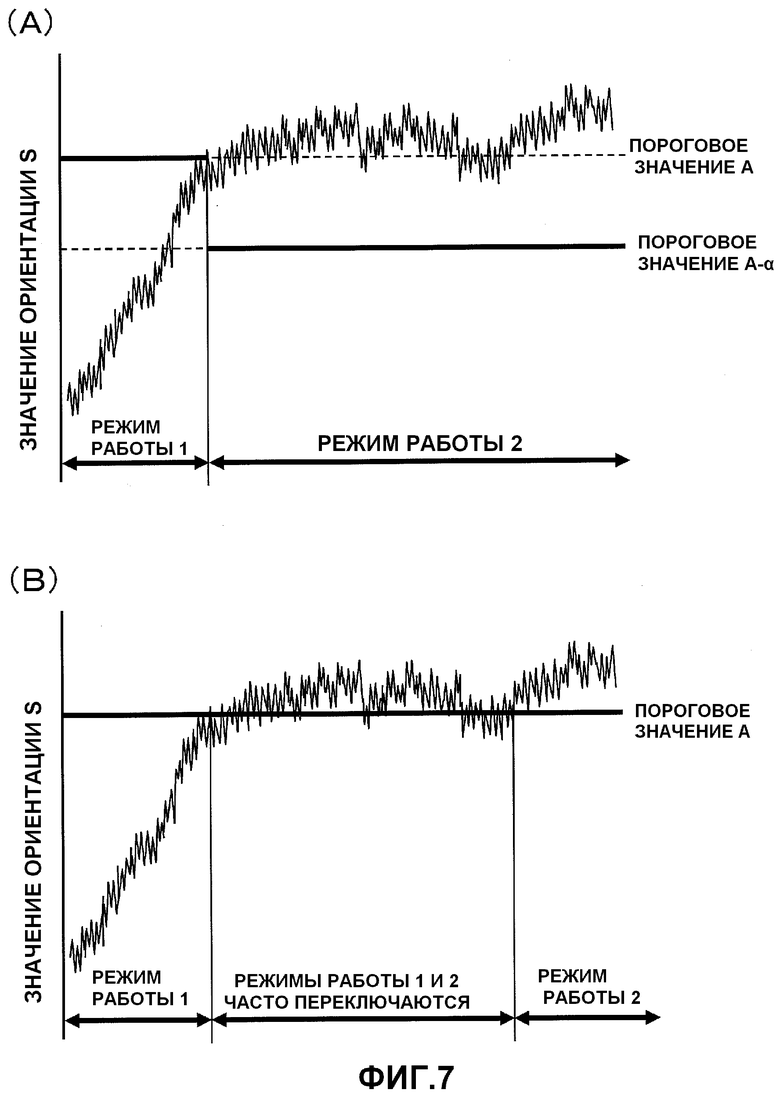
Преимущества управления переключением режима работы по настоящему варианту осуществления будут описаны со ссылкой на фиг.7A и фиг.7B. На фиг.7B представлен пример использования постоянного порогового значения A для определения переключения между режимом работы 1 и режимом работы 2 в качестве сравнительного примера. Вертикальная ось показывает значение ориентации S, а горизонтальная ось показывает время. Во-первых, предполагается, что значение ориентации S меньше порогового значения A, и электрическая зубная щетка запускается в режиме работы 1. Поскольку пользователь постепенно расширяет угол наклона щетки из такого состояния, переключение из режима работы 1 в режим работы 2 происходит в такой момент времени, когда значение ориентации S достигает порогового значения A. В этом случае значение ориентации S должно поддерживаться на значении, значительно большем, чем пороговое значение A (например, 45 градусов), но если значение ориентации S находится вблизи порогового значения A, как представлено на фиг.7B, соотношение величин значения ориентации S и порогового значения A легко меняется на противоположное, и поэтому режимы работы 1 и 2 часто переключаются и работа становится неустойчивой. В частности, поскольку в электрической зубной щетке имеется двигатель, вибрационный шум двигателя накладывается на выходной сигнал датчика ускорения, и колебание значения ориентации S является большим.
Следовательно, в настоящем варианте осуществления, как представлено на фиг.7A, для границы переключения между режимом работы 1 и режимом работы 2 устанавливается интервал (зазор) α путем динамического изменения порогового значения в соответствии с текущим режимом работы. То есть, хотя определение переключения режима работы выполняется при пороговом значении A во время режима работы 1, определение переключения выполняется при пороговом значении A-α после того, как значение ориентации S превысило пороговое значение A и выполнено переключение в режим работы 2. Следовательно, даже если значение ориентации S колеблется вблизи порогового значения A, как представлено на фиг.7A, его колебание поглощается за счет интервала α и возникновение частого переключения режимов работы подавляется. Возникновение частого переключения режимов работы подавляется подобным образом за счет предела β при управлении переключением между режимами работы 2 и 3.
В описанном выше варианте осуществления интервал в один градус обеспечивается при преобразовании в угол наклона щетки, но значение интервала этим не ограничивается. Для интервалов α, β предпочтительно устанавливаются значения, большие, чем максимальное значение диапазона колебания значения ориентации S, вызываемого вибрацией двигателя (источника привода). Это сделано для того, чтобы в максимальной степени не допустить переключения режимов работы, вызванного вибрацией источника привода. Однако, если установленный интервал слишком велик, чувствительность к переключению режимов работы может снижаться и может, вероятно, создавать некомфортные ощущения для пользователя. Поэтому для практических целей значение интервала предпочтительно составляет меньше половины численной величины диапазона одного режима работы и, более предпочтительно, меньше десяти градусов при преобразовании в угол наклона щетки.
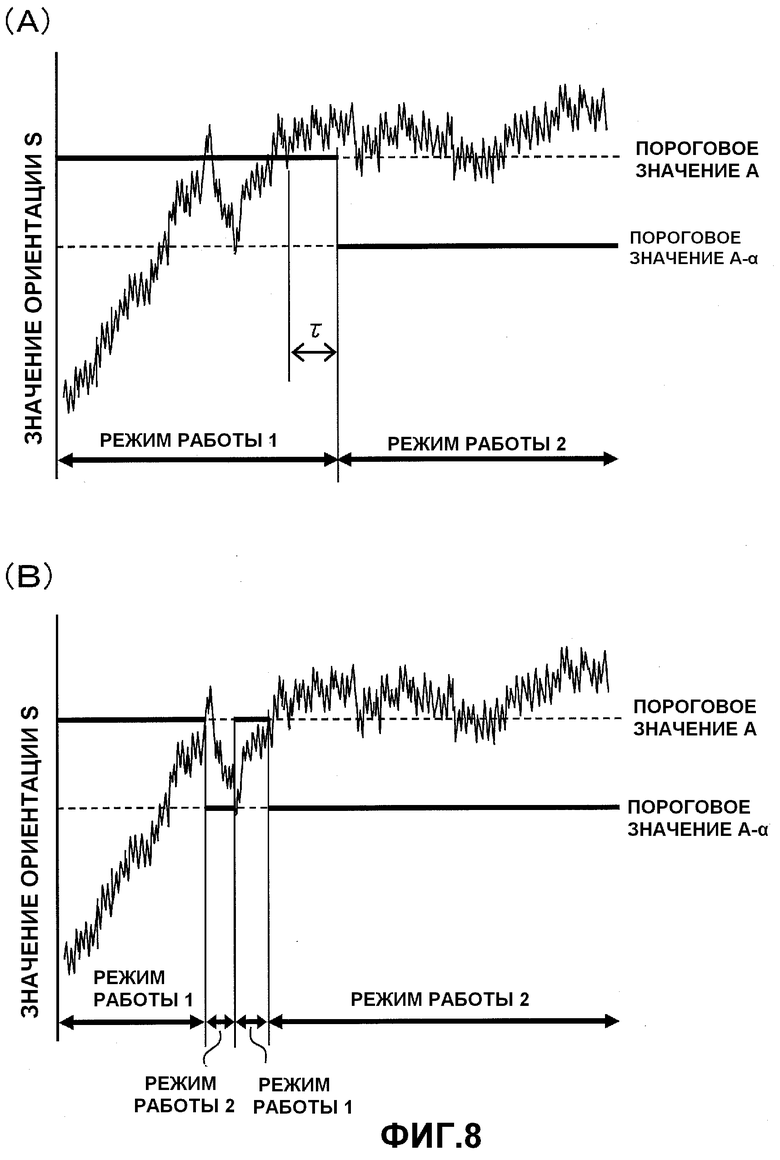
Если значение ориентации S быстро изменяется вблизи порогового значения A, как представлено на фиг.8B, частое переключение режимов работы может происходить, даже если пороговое значение изменено, как в описанном выше варианте осуществления. Например, если пользователь рефлекторно останавливает руку или возвращается к прежнему углу наклона щетки при переключении режима работы, может появиться возможность такого быстрого изменения. В данном случае вместо немедленного переключения режима работы, когда значение ориентации S превышает пороговое значение A, режим работы может переключаться, только если состояние, в котором значение ориентации S превышает пороговое значение A, сохраняется в течение заданного времени τ (например, τ=250 мсек), как представлено на фиг.8A. Частое переключение режимов работы дополнительно подавляется таким управлением переключением. Подобное время τ может быть установлено для переключения из режима работы 2 в 1 или переключения из режима работы 2 в 3, а также из 3 в 2.
Прочие
Конфигурация описанного выше варианта осуществления только иллюстрирует один конкретный пример настоящего изобретения. Объем изобретения не ограничивается таким вариантом осуществления, и могут быть выполнены различные модификации в пределах объема технической идеи. Например, в описанном выше варианте осуществления была описана электрическая зубная щетка, работающая с использованием способа вибрации, возникающей за счет груза с эксцентриком, однако настоящее изобретение также применимо к электрической зубной щетке других систем движения. Например, настоящее изобретение применимо даже к электрической зубной щетке, объединяющей вращательное возвратно-поступательное движение, линейное возвратно-поступательное движение, вращательное движение чистящей щетины или их сочетания. Настоящее изобретение также применимо к электрической зубной щетке, работающей не от заряжаемого аккумулятора, а от батарей либо работающей с использованием присоединения шнура питания.
Число и содержание режимов работы не ограничивается примером описанного выше варианта осуществления. Число режимов работы может составлять два или более трех. Для каждого режима работы щетки может переключаться не только число колебаний (число оборотов двигателя), но и системы движения, направления движения или тому подобное. В некоторых случаях частое переключение режимов работы может подавляться путем применения настоящего изобретения для определения переключения между соседними режимами работы. Пороговые значения и значения интервала могут быть установлены произвольно в соответствии с техническими характеристиками изделия.
Формула вычисления значения ориентации S не ограничивается примером описанного выше варианта осуществления. Например, значение ориентации S, соответствующее углу наклона щетки θ, может быть вычислено только из компоненты ускорения Ax в направлении X или компоненты ускорения Az в направлении Z. Значение ориентации S может также быть более точно вычислено путем принятия во внимание компоненты ускорения Ay в направлении Y в дополнение к Ax и Az. В описанном выше варианте осуществления угол наклона щетки учитывается для положения основного корпуса зубной щетки, но предпочтительно также принимать во внимание положение при чистке. Значение ориентации S в этом случае имеет значение, соответствующее положению при чистке или и положению при чистке, и углу наклона щетки. Другими словами, для значения ориентации S может быть приспособлена любая шкала, если только это шкала, которая прямо или косвенно отображает положение основного корпуса зубной щетки. В дополнение к датчику ускорения в качестве датчика ориентации для определения положения основного корпуса зубной щетки может использоваться датчик вращения, датчик угла наклона, гироскоп и тому подобное. Ориентация может более точно определяться предпочтительно путем сочетания датчиков множества типов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2493760C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2444325C1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2009 |
|
RU2445938C1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2008 |
|
RU2389447C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЗУБНОЙ ЩЕТКИ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ УГЛА ЧИСТКИ (ВАРИАНТЫ) | 2015 |
|
RU2695257C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ПРЕДОСТАВЛЕНИЯ ОБРАТНОЙ СВЯЗИ О СЕАНСЕ ЧИСТКИ | 2016 |
|
RU2721510C2 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЁТКА И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ, УСТРОЙСТВО, СИСТЕМА, ПЛАТА УПРАВЛЕНИЯ И НОСИТЕЛЬ ДЛЯ НЕЁ | 2024 |
|
RU2840672C1 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ЧАСТИ ТЕЛА ЧЕЛОВЕКА | 2015 |
|
RU2752387C2 |
| Система чистки зубов на основе текучей среды | 2020 |
|
RU2810807C2 |
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЗУБНОЙ ЩЕТКИ | 2009 |
|
RU2498786C2 |
Изобретение относится к области медицинской техники и предназначено для чистки зубов. Электрическая зубная щетка содержит основной корпус, датчик ориентации и средство управления для автоматического переключения режима работы источника привода. Основной корпус электрической зубной щетки включает в себя источник привода щетки. Датчик ориентации предназначен для определения ориентации основного корпуса электрической зубной щетки. Средство управления предназачено автоматического переключения режима работы источника привода из множества режимов работы в соответствии с результатом сравнения значения ориентации, которое является значением, вычисленным на основе выходного сигнала датчика ориентации, с установленным заранее пороговым значением. Для первого порогового значения, используемого для определения переключения из первого режима работы во второй режим работы, и второго порогового значения, используемого для определения переключения из второго режима работы в первый режим работы, установлены разные значения. 4 з.п. ф-лы, 8 ил.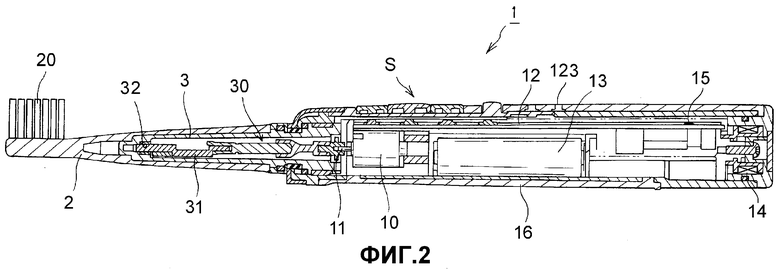
1. Электрическая зубная щетка, содержащая:
основной корпус электрической зубной щетки, включающий в себя источник привода щетки;
датчик ориентации для определения ориентации основного корпуса электрической зубной щетки; и
средство управления для автоматического переключения режима работы источника привода из множества режимов работы в соответствии с результатом сравнения значения ориентации, которое является значением, вычисленным на основе выходного сигнала датчика ориентации, с установленным заранее пороговым значением; при этом
для первого порогового значения, используемого для определения переключения из первого режима работы во второй режим работы, и второго порогового значения, используемого для определения переключения из второго режима работы в первый режим работы, установлены разные значения.
2. Электрическая зубная щетка по п.1, в которой первое пороговое значение и второе пороговое значение установлены таким образом, что их разность становится больше, чем максимальное значение диапазона колебаний значения ориентации, вызванных вибрацией источника привода.
3. Электрическая зубная щетка по п.1, в которой
первое пороговое значение больше, чем второе пороговое значение; и
средство управления переключает первый режим работы на второй режим работы, когда значение ориентации превышает первое пороговое значение во время первого режима работы, и переключает второй режим работы на первый режим работы, когда значение ориентации становится меньше, чем второе пороговое значение во время второго режима работы.
4. Электрическая зубная щетка по п.1, в которой
первое пороговое значение больше, чем второе пороговое значение; и
средство управления переключает первый режим работы на второй режим работы, когда состояние, при котором значение ориентации превышает первое пороговое значение, сохраняется в течение заданного времени во время первого режима работы, и переключает второй режим работы на первый режим работы, когда состояние, при котором значение ориентации становится меньше, чем второе пороговое значение, сохраняется в течение заданного времени во время второго режима работы.
5. Электрическая зубная щетка по любому из пп.1-4, в которой датчик ориентации представляет собой датчик ускорения и значение ориентации является функцией выходного значения датчика ускорения.
| Кипятильник для воды | 1921 |
|
SU5A1 |

