ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение имеет отношение к способу системы круиз-контроля с регулированием расчетной скорости в соответствии с родовым понятием п. 1 формулы изобретения и к системе круиз-контроля с регулированием расчетной скорости в соответствии с родовым понятием п. 12 формулы изобретения. Настоящее изобретение также имеет отношение к компьютерной программе и компьютерному программному продукту, которые реализуют способ в соответствии с изобретением.
УРОВЕНЬ ТЕХНИКИ
В настоящее время механические транспортные средства, например, автомобили, грузовые автомобили и автобусы, обычно снабжаются системой круиз-контроля. Задача системы круиз-контроля состоит в том, чтобы достигнуть предопределенной равномерной скорости транспортного средства. Это делается либо посредством корректировки крутящего момента двигателя во избежание замедления, либо посредством применения торможения на скатах, когда транспортное средство ускоряется под действием собственного веса. Более общая задача системы круиз-контроля состоит в том, чтобы достигнуть удобного управления и большего комфорта для водителя транспортного средства.
Водитель механического транспортного средства с системой круиз-контроля обычно выбирает заданную скорость vset в качестве желаемой скорости, поддерживаемой транспортным средством максимально долго на ровных дорогах, например, в зависимости от характеристик двигателя и веса транспортного средства или от того, имеется ли впереди другое транспортное средство, движущееся на низкой скорости. Тогда система круиз-контроля обеспечивает двигателю транспортного средства расчетную скорость vref, которая используется для управления двигателем. Таким образом, заданная скорость vset может рассматриваться как входной сигнал системы круиз-контроля, и расчетная скорость vref - как выходной сигнал системы круиз-контроля, который используется для управления двигателем.
В сегодняшних традиционных системах круиз-контроля (CC) расчетная скорость vref идентична заданной скорости vset, установленной пользователем системы, например, водителем транспортного средства. Таким образом, сегодняшние традиционные системы круиз-контроля поддерживают постоянную расчетную скорость, соответствующую заданной скорости vset, установленной водителем. Значение расчетной скорости vref при этом изменяется только тогда, когда сам пользователь корректирует ее во время поездки.
В настоящее время имеются системы круиз-контроля, так называемые системы круиз-контроля с регулированием расчетной скорости, например, система круиз-контроля Ecocruise, которые пытаются оценить текущее сопротивление движению, а также знать хронологию сопротивления движению.
Опытный водитель, использующий транспортное средство без системы круиз-контроля, может уменьшить потребление топлива, адаптируя вождение к характеристикам предстоящей дороги таким образом, чтобы можно было избежать ненужного торможения и/или потребляющего топливо ускорения. Дальнейшее развитие этих систем круиз-контроля с регулированием расчетной скорости пытается подражать адаптивному вождению опытного водителя на основе знания предстоящей дороги, чтобы потребление топлива могло быть сохранено насколько возможно низким, поскольку это значительно влияет на доходность для владельца транспортного средства, например, компании по перевозкам и т.п.
Примером такого дальнейшего развития системы круиз-контроля с регулированием расчетной скорости является "упреждающая" система круиз-контроля (LACC), то есть стратегическая система круиз-контроля, которая использует знание участков предстоящей дороги, то есть знание природы предстоящей дороги для определения конфигурацию расчетной скорости vref. Таким образом, при этом расчетной скорости vref разрешено отличаться в пределах диапазона скорости от заданной скорости vset, выбранной водителем, чтобы обеспечить такое вождение, которое экономит больше топлива, а также является более удобным и более безопасным.
Знание предстоящего дорожного участка, например, может содержать преобладающую топологию, кривизну дороги, дорожную обстановку, дорожные работы, интенсивность движения и состояние дороги. Оно также может содержать ограничение скорости для предстоящего участка дороги и дорожный знак около дороги. Это знание, например, может быть получено из информации о местоположении, например, из информации системы глобального позиционирования (GPS), информации карты и/или информации топографической карты, из прогноза погоды, из информации, переданной между разными транспортными средствами, и из информации, переданной по радио. Эти различные типы знания могут использоваться различными способами. Например, знание о предстоящем ограничении скорости может использоваться для экономии топлива посредством понижения скорости транспортного средства, прежде чем зона ограничения скорости будет достигнута. Аналогичным образом, знание о дорожном знаке, передающем информацию, например, о предстоящем участке с круговым движением или перекрестке, также может использоваться для экономии топлива посредством торможения до достижения участка с круговым движением или перекрестка.
Система круиз-контроля с регулированием расчетной скорости, например, может предсказать скорость транспортного средства вдоль горизонта любой подходящей длины, например, приблизительно 1-2 км. Будущая скорость транспортного средства вдоль горизонта предсказывается различными способами, такими как вождение с традиционной системой круиз-контроля при расчетной скорости vref, которая является такой же, как заданная скорость vset, или изменение расчетной скорости vref относительно заданной скорости vset.
Упреждающая система круиз-контроля (LACC), например, действительно позволяет увеличить расчетную скорость vref перед крутым подъемом до уровня выше заданной скорости vset, поскольку транспортное средство предположительно потеряет скорость на крутом подъеме вследствие большого веса состава относительно характеристик двигателя. Аналогичным образом, упреждающая система круиз-контроля позволяет уменьшить расчетную скорость vref до уровня ниже заданной скорости vset перед крутым спуском, поскольку на таком спуске транспортное средство предположительно ускорится посредством своего большого веса состава. При этом концепция состоит в том, что с точки зрения экономии топлива лучше использовать в своих интересах ускорение транспортного средства посредством собственного веса на скате, чем первоначально ускориться перед скатом и затем тормозить на скате. Таким образом, упреждающая система круиз-контроля может уменьшить потребление топлива без влияния на время поездки, одновременно достигая удобного и безопасного вождения.
Имеются также системы круиз-контроля, которые используют текущее сопротивление движению как основу для принятия решения, каким образом должна изменяться скорость транспортного средства. Это означает, что расчетной скорости vref в этих системах круиз-контроля может быть разрешено отклоняться от заданной скорости vset на основе по меньшей мере одной характеристики сопротивления движению, например, его величины и/или характера изменения в течение долгого времени.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Как упомянуто выше, упреждающая система круиз-контроля имеет знание о местоположении транспортного средства и локальной топографии, но на желаемую водителем расчетную скорость vref, используемую системой в качестве выходного сигнала, также могут влиять другие параметры. Такие параметры могут содержать, например, других пользователей дороги и то, как они ведут себя в движении. Другой такой параметр может представлять собой преобладающую дорожную ситуацию, например, дорожные работы.
При использовании системы круиз-контроля с регулированием расчетной скорости очень важно, чтобы транспортное средство вело себя таким образом, чтобы соответствовать намерениям водителя. Если оно этого не делает, есть неизбежный риск, что водитель может захотеть выключить или не захотеть включать систему круиз-контроля с регулированием расчетной скорости.
Водитель, который не хочет использовать систему круиз-контроля с регулированием расчетной скорости, может вызвать общее повышение потребления топлива.
Задача настоящего изобретения состоит в том, чтобы предложить систему круиз-контроля с регулированием расчетной скорости, над которой пользователь чувствует контроль, и которая одновременно обеспечивает такое вождение транспортного средства, которое экономит топливо и является удобным и/или безопасным.
Решение этой задачи достигается упомянутым выше способом для системы круиз-контроля с регулированием расчетной скорости в соответствии с характеризующей частью пункта 1 формулы изобретения. Ее решение также достигается упомянутой выше системой круиз-контроля с регулированием расчетной скорости в соответствии с характеризующей частью пункта 12 формулы изобретения и упомянутыми выше компьютерной программой и компьютерным программным продуктом.
В соответствии с настоящим изобретением допускается корректировка по меньшей мере заданной скорости vset, если расчетная скорость vref для системы круиз-контроля с регулированием расчетной скорости отличается от заданной скорости vset, то есть, если vref≠vset. Эта корректировка в соответствии с настоящим изобретением основана по меньшей мере частично на текущей скорости vpres и на пользовательском вводе системы круиз-контроля с регулированием расчетной скорости.
Когда корректировка в соответствии с изобретением имеет отношение к текущей скорости vpres, пользователь может использовать единственный ввод, например, единственное нажатие кнопки, чтобы скорректировать значение для заданной скорости vset в значительной степени вверх или вниз, особенно если текущая скорость vpres не близка к предыдущей заданной скорости vset. Согласно предшествующему уровню техники, пользователь должен был делать повторяющиеся вводы с малыми шагами, каждый из которых корректирует заданную скорость vset только в малой степени, что пользователь системы круиз-контроля мог бы счесть затруднительным и не удобным. С помощью настоящего изобретения единственный пользовательский ввод, таким образом, побуждает сделать большой шаг заданной скорости vset и остановиться на значении, имеющем отношение к текущей скорости vpres транспортного средства. Поскольку этот "более длинный шаг" лучше соответствует намерению водителя, он сочтет функцию настоящего изобретения интуитивно хорошей.
Относительно безопасности дорожного движения также выгодно, чтобы водитель транспортного средства мог несколькими простыми вводами скорректировать заданную скорость vset без потери концентрации на предстоящем участке дороги.
Настоящее изобретение позволяет пользователю системы круиз-контроля с регулированием расчетной скорости изменять заданную скорость vset таким образом, чтобы она стала соответствовать текущей скорости vpres. Это позволяет пользователю, который может являться водителем транспортного средства, чувствовать, что он может быстро скорректировать заданную скорость vset для системы круиз-контроля с регулированием расчетной скорости и, следовательно, скорость транспортного средства, что многие пользователи сочтут очень положительным. Тогда это положительное чувство возможности быстро управлять скоростью транспортного средства, когда ею управляет система круиз-контроля с регулированием расчетной скорости, может увеличить готовность водителя использовать системы круиз-контроля с регулированием расчетной скорости и/или уменьшить риск выключения пользователем системы круиз-контроля с регулированием расчетной скорости, которая может являться, например, адаптивной системой круиз-контроля (ACC) или системой круиз-контроля, которая использует знание предстоящих участков дороги.
Желание водителя иметь возможность эффективно влиять на скорость транспортного средства тем самым подтверждается посредством использования изобретения. Общий результат, когда использование системы круиз-контроля с регулированием расчетной скорости повышается в результате более положительного отношения водителя к ее функции, заключается в более удобном для водителя вождении и уменьшенном потреблении топлива.
В соответствии с различными вариантами осуществления изобретения на основе ввода водителя и текущей скорости vpres транспортного средства заданная скорость vset устанавливается равной разным значениям, соответствующим различным ситуациям вождения. Это имеет преимущество, когда водитель часто хочет изменять заданную скорость на значение текущей скорости транспортного средства vpres, и поэтому обычно не заинтересован в том, чтобы вносить малые корректировки заданной скорости vset относительно значения, которое не является релевантным, то есть относительно заданной скорости vset, которая довольно значительно отличается от текущей скорости vpres транспортного средства. Эти варианты осуществления позволяют водителю сконцентрироваться на предстоящей дороге и/или других пользователях дороги вместо того, чтобы отвлекаться нелогичной обработкой параметров системы круиз-контроля.
Например, в соответствии с вариантом осуществления, ввод приводит к установке заданной скорости vset равной скорректированному вверх значению vpres+vadj текущей скорости, таким образом, vset=vpres+vadj. Это предпочтительно, когда предпочитаемая водителем скорость близка к текущей скорости vpres, но не близка к заданной скорости vset, поскольку корректировка при этом может здесь внесена единственным вводом.
В соответствии с другим вариантом осуществления, ввод приводит к установке заданной скорости vset равной скорректированному вниз значению vpres-vadj упомянутой текущей скорости, таким образом, vset=vpres-vadj. Это предпочтительно, если предпочитаемая водителем скорость близка к текущей скорости vpres, но не близка к заданной скорости vset.
Например, если текущая скорость vpres в значительной степени отличается от начальной заданной скорости vset, нужен только один ввод водителя. Таким образом, водителю не требуется выполнять повторные вводы для достижения желаемой другой заданной скорости vset.
В соответствии с другим вариантом осуществления ввод приводит к установке заданной скорости vset равной фактической текущей скорости vpres, таким образом, vset=vpres. Это предпочтительно, когда текущая скорость vpres в значительной степени отличается от начальной заданной скорости vset. Это предпочтительно, если предпочитаемая водителем скорость соответствует текущей скорости vpres, но не близка к заданной скорости vset. Единственный ввод водителя приводит при этом к относительно большому изменению заданной скорости vset.
В этой спецификации изобретение иллюстрируется для использования в системе круиз-контроля, такой как упреждающая система круиз-контроля (LACC), то есть стратегическая система круиз-контроля, которая может использовать знание природы предстоящей дороги для управления расчетной скоростью vref. Однако изобретение может быть реализовано в значительной степени в любой системе круиз-контроля, в которой расчетной скорости vref может быть разрешено отличаться от заданной скорости vset.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение разъяснено более подробно ниже со ссылкой на приложенные чертежи, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов.
Фиг. 1 изображает пример скоростей в ситуации вождения,
Фиг. 2 изображает пример скоростей в ситуации вождения,
Фиг. 3 изображает пример скоростей в ситуации вождения,
Фиг. 4 изображает пример скоростей в ситуации вождения,
Фиг. 5 изображает пример устройства ввода данных,
Фиг. 6 - блок-схема последовательности операций способа в соответствии с изобретением,
Фиг. 7 изображает блок управления, который работает в соответствии с изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение позволяет пользователю системы круиз-контроля с регулированием расчетной скорости влиять на заданную скорость vset таким образом, чтобы она стала связанной с текущей скоростью vpres транспортного средства. Настоящее изобретение позволяет эту корректировку, когда расчетная скорость vref для системы круиз-контроля с регулированием расчетной скорости отличается от заданной скорости vset. Эта корректировка основана, по меньшей мере частично, на пользовательском вводе системы круиз-контроля с регулированием расчетной скорости и на текущей скорости vpres транспортного средства.
Таким образом, пользователь системы круиз-контроля с регулированием расчетной скорости может внести относительно большую корректировку заданной скорости vset с помощью единственного ввода, например, единственного нажатия кнопки, чтобы скорректированная заданная скорость vset приняла значение, связанное с текущей скоростью vpres транспортного средства. Возможность легко скорректировать заданную скорость vset до значения, равного или близкого к текущей скорости vpres транспортного средства, представляет собой средство, которое пользователь будет готов использовать относительно часто, поскольку водителю легче соотнестись с текущей скоростью vpres, на которой транспортное средство фактически движется в заданный момент, чем с заданной скоростью vset, поскольку последняя представляется водителю более абстрактной. Поэтому для пользователя очень предпочтительно иметь возможность произвести эту корректировку посредством наименьшего возможного количества вводов, исходя из удобства водителя и из безопасности дорожного движения. Таким образом, настоящее изобретение дает возможность производить эту корректировку с помощью единственного пользовательского ввода.
В соответствии с вариантом осуществления настоящего изобретения заданная скорость vset устанавливается равной текущей скорости vpres транспортного средства, то есть vset=vpres, когда пользователю разрешено изменять заданную скорость vset с помощью ввода. Результатом является заданная скорость vset, с которой водитель транспортного средства может сразу соотнестись в терминах скорости, поскольку это именно та скорость, которую поддерживает транспортное средство, когда корректировка внесена. Этот вариант осуществления проиллюстрирован на фиг. 2 и описан ниже.
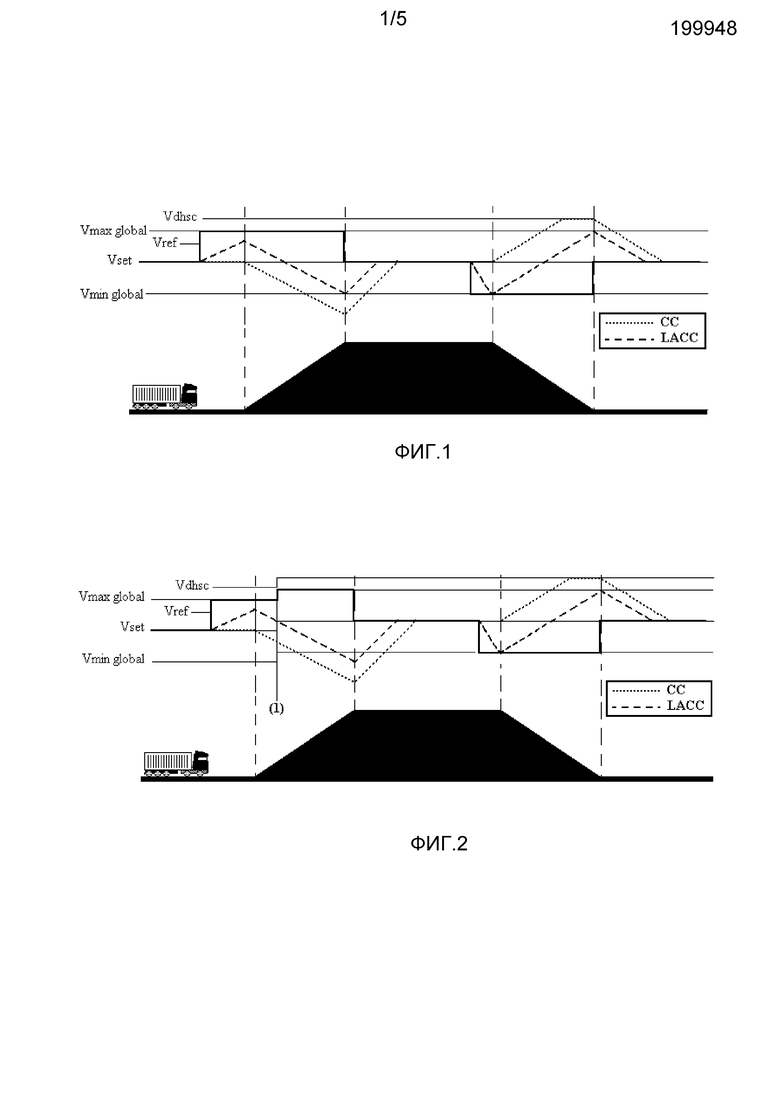
Фиг. 1 изображает пример того, какой будет скорость для транспортного средства с традиционной системой круиз-контроля (CC: пунктирная линия) на участке дороги, на котором за подъемом следует ровная дорога и затем скат. При традиционной системе круиз-контроля расчетная скорость vref устанавливается все время равной заданной скорости vset. Экономичная система круиз-контроля пытается, где только возможно, сохранить скорость транспортного средства в пределах диапазона между общей самой низкой допустимой скоростью vmin glob и общей самой высокой допустимой скоростью vmax glob. Однако эти самая низкая и самая высокая допустимые скорости прежде всего предназначены служить пределами для скоростей, которые допустимы на склоне, чтобы гарантировать, что скорость транспортного средства подвергается оптимальному изменению относительно приоритетов времени движения и/или потребления топлива. Самая низкая допустимая скорость vmin glob, таким образом, указывает, насколько велика может быть скорость транспортного средства перед скатом, и самая высокая допустимая скорость vmax glob - насколько велика она может быть перед подъемом.
Схема показывает, что скорость транспортного средства с традиционной системой круиз-контроля (CC) ниже общей самой низкой допустимой скорости vmin glob на вершине склона и выше общей самой высокой допустимой скорости vmax glob в конце ската. Это само по себе не слишком важно, но с точки зрения экономии топлива важно то, что скорость транспортного средства фактически уменьшается посредством тормоза постоянной скорости, когда достигнута скорость vdhsc, при которой выполняется управление скоростью на спусках (DHSC). Тормоз постоянной скорости регулирует скорость, например, грузовых автомобилей на скатах посредством использования вспомогательных тормозов, например, замедлителя и тормоза в выпускной системе двигателя, четырехступенчатого электромагнитного тормоза (Telma) и/или тормоза в выпускной системе двигателя Volvo (VEB). Таким образом, традиционная система круиз-контроля не оптимальна для управления скоростью на спусках.
Фиг. 1 также иллюстрирует пример, какой будет скорость транспортного средства с упреждающей системой круиз-контроля (LACC: прерывистая линия). Система LACC базирует расчетную скорость vref (жирная непрерывная линия), среди прочего, на заданной скорости vset и на знании топографической информации, например, информации о подъеме, ровном участке и скате на фиг. 1. Схема показывает, что система LACC не уходит ниже общей самой низкой допустимой скорости vmin glob на вершине склона, так как расчетной скорости vref разрешается превышать заданную скорость vset перед и во время движения в гору. Также системой LACC не превышается общая самая высокая допустимая скорость vmax glob, так как расчетной скорости vref разрешается быть нижней заданной скорости vset перед и во время движения под гору. Таким образом, система LACC позволяет расчетной скорости vref отличаться от заданной скорости vset. Фиг. 1 показывает, какой должна быть, как полагает система LACC, расчетная скорость vref, чтобы оптимизировать функцию затрат системы LACC. Никакая энергия не расходуется тормозом постоянной скорости, когда используется система LACC, что является оптимальным с точки зрения экономии топлива.
Фиг. 2 иллюстрирует пример варианта осуществления настоящего изобретения, в котором заданная скорость vset в момент (1) устанавливается равной текущей скорости vpres транспортного средства, то есть vset=vpres, на основе пользовательского ввода. Схема показывает, что уровни для общей самой низкой допустимой скорости vmin glob, общей самой высокой допустимой скорости vmax glob и скорости vdhsc тормоза постоянной скорости также скорректированы. Характер поведения системы круиз-контроля с регулированием расчетной скорости (прерывистая линия на фигуре 2) очень похож на оптимальный характер поведения в соответствии с фиг. 1, но увеличивает удобство водителя и чувство контроля над ситуацией.
В соответствии с вариантом осуществления настоящего изобретения пользовательский ввод устанавливает заданную скорость vset равной скорректированному вверх значению vpres+vadj текущей скорости, то есть vset=vpres+vadj. Результатом является заданная скорость vset, близкая к скорости vpres, которую транспортное средство поддерживает при корректировке, но скорректированная немного вверх, что дает очень простой и быстрый ввод для пользователя.
В соответствии с другим вариантом осуществления ввод устанавливает заданную скорость vset равной скорректированному вниз значению vpres-vadj упомянутой текущей скорости, то есть vset=vpres-vadj. Этот вариант осуществления аналогичным образом дает очень простой и быстрый ввод для пользователя.
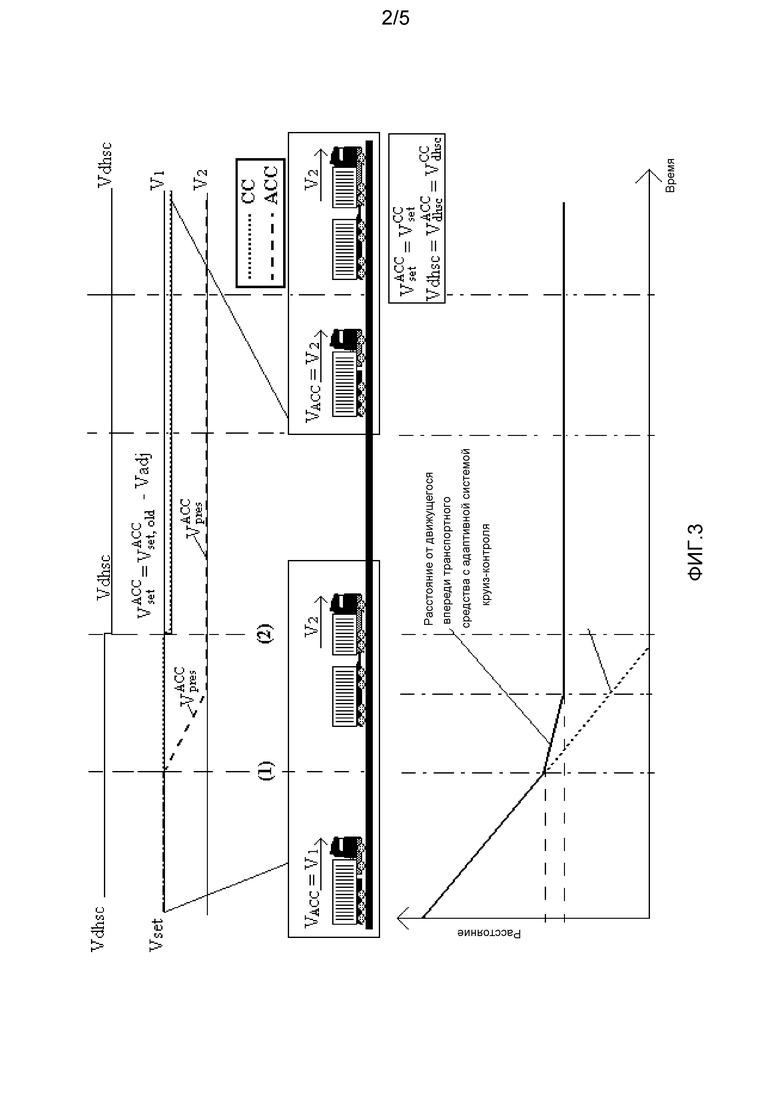
Фиг. 3 и 4 иллюстрируют пример того, как настоящее изобретение может влиять на адаптивную систему круиз-контроля (ACC). Система ACC использует радар для поддержания временного промежутка относительно движущегося впереди транспортного средства, что соответствует некоторому расстоянию на ровной дороге, если движущееся впереди транспортное средство первоначально движется на более низкой скорости, чем транспортное средство с системой ACC. Таким образом, транспортное средство с системой ACC подвергается торможению, когда оно нагоняет другое транспортное средство, с тем чтобы между этими двумя транспортными средствами сохранялся в значительной степени постоянный промежуток. Схемы также иллюстрируют функцию традиционной системы круиз-контроля (CC), которая не учитывает скорость движущегося впереди транспортного средства. Функция системы CC изображена для иллюстрации преимущества функции системы ACC.
Фиг. 3 изображает сценарий, в котором настоящее изобретение не реализовано, для иллюстрации различия между функцией предшествующего уровня техники и функцией в настоящем изобретении.
Фиг. 3 изображает слева тягач, к которому присоединен полуприцеп, и который следует за грузовиком с прицепом. Тягач с полуприцепом оборудован системой ACC. Это изображение слева иллюстрирует начальную стадию взаимоотношения между транспортными средствами, на которой тягач с полуприцепом нагоняет грузовик с прицепом, ситуация, которая принадлежит началу графика скорости наверху схемы.
Первоначально тягач с полуприцепом и системой ACC движется на скорости vACC (прерывистая линия) с первым значением vACC=v1, которая выше второй скорости v2 грузовика и прицепа впереди. Эта первая скорость v1 управляется заданной скоростью, установленной, например, водителем транспортного средства. Функция системы ACC начинает влиять на скорость тягача в первый момент (1), понижая его фактическую скорость vpres до второй скорости v2 и тем самым препятствуя тягачу и полуприцепу столкнуться с грузовиком и прицепом. После этого понижения фактической скорости тягача vpres до той же самой скорости v2, с которой движется грузовик и прицеп впереди, то есть vpres=v2, между этими двумя транспортными средствами будет в значительной степени постоянный промежуток времени, соответствующий в значительной степени постоянному расстоянию на ровной дороге. Эта ситуация изображена справа на фигуре 3, на которой скорость vACC тягача и полуприцепа является в значительной степени такой же, как скорость v2 грузовика и прицепа, то есть vACC=v2.
График расстояния внизу фиг. 3 иллюстрирует, как изменяется расстояние между тягачом с системой ACC и грузовиком с прицепом (непрерывная линия). Расстояние уменьшается до тех пор, пока в первый момент (1) функция системы ACC не понижает скорость vACC тягача до того значения, которое имеет скорость грузовика с прицепом, то есть vACC=v2, и в итоге через некоторое время расстояние является постоянным.
Во второй момент (2) пользователь корректирует установленную системой ACC скорость vset ACC до значения vset ACC, old-vadj (в этой спецификации vset ACC, old обозначает заданную скорость vset ACC до внесения корректировки). Как можно видеть на фиг. 3, эта корректировка влияет только на заданную скорость тягача, но не на его фактическую скорость vpres. Водитель будет чувствовать, что его ввод не имеет значения, и что он имеет реального контроля над транспортным средством.
Фиг. 3 также иллюстрирует, какими были бы скорость и расстояние между транспортными средствами, если бы тягач с полуприцепом был оборудован традиционной системой круиз-контроля (CC), не использующей радар для корректировки скорости транспортного средства на основе скорости движущегося впереди транспортного средства. Как показывает график скорости, скорость vCC тягача следует за заданной скоростью vset CC, введенной пользователем. Это привело бы к тому, что тягач с традиционной системой круиз-контроля столкнулся бы с грузовиком с прицепом, если бы его водитель не вмешался. Это произошло бы потому, что скорость тягача здесь постоянно больше скорости грузовика с прицепом.
При этом следует отметить, что соответствующие заданные скорости для системы ACC и традиционной системы круиз-контроля, то есть vset ACC и vset CC, в конечном счете равны в этом примере, то есть vset=vset ACC=vset CC, и что соответствующие скорости vdhsc ACC и vdhsc CC тормоза постоянной скорости равны в этом примере, то есть vdhsc=vdhsc ACC=vdhsc CC.
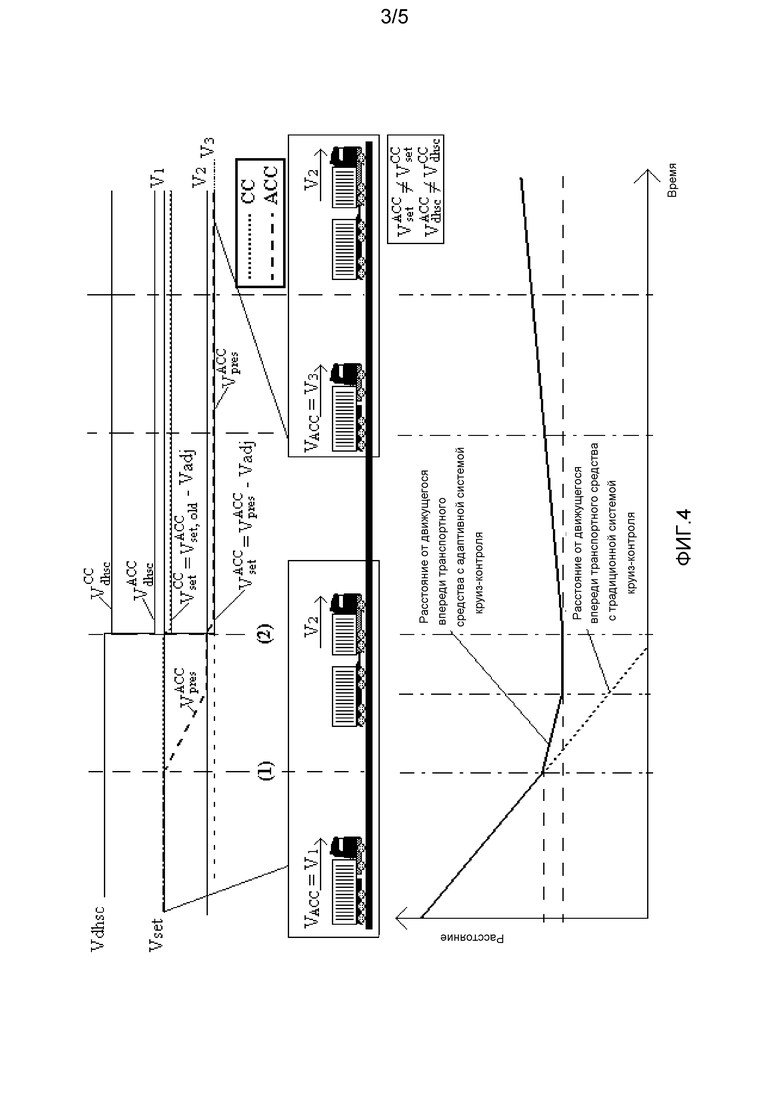
Фиг. 4 иллюстрирует пример того, как настоящее изобретение может влиять на адаптивную систему круиз-контроля (ACC). Фиг. 4 построена аналогично фиг. 3, то есть слева изображен начальный сценарий с тягачом, к которому присоединен полуприцеп, и который оборудован системой ACC и нагоняет грузовик с прицепом, так как тягач движется на более высокой скорости vACC=v1, чем скорость v2 грузовика с прицепом.
В первый момент (1) функция системы ACC начинает влиять на скорость тягача, понижая ее фактическую скорость vpres до второй скорости v2 и тем самым препятствуя столкновению тягача с грузовиком с прицепом. После этого фактическая скорость vpres тягача равна скорости движущегося впереди грузовика с прицепом, то есть vpres=v2, что приводит затем к в значительной степени постоянному промежутку времени между транспортными средствами.
Во второй момент (2) в соответствии с настоящим изобретением пользователь корректирует установленную системой ACC заданную скорость vset вниз на основе текущей скорости vpres ACC тягача таким образом, что vset ACC=vpres ACC-vadj. Как можно видеть на фиг. 4, эта корректировка влияет на заданную скорость vset ACC таким образом, что фактическая скорость vpres также подвергается влиянию. Поскольку корректировка заданной скорости vset ACC связана с текущей скоростью vpres, скорректированная заданная скорость vset ACC будет ниже текущей скорости vpres, которая уменьшится до более низкого значения, чем скорость v2 грузовика с прицепом.
Это приведет к тому, что тягач с системой ACC будет иметь более низкую скорость, чем скорость v2 движущегося впереди транспортного средства, и, таким образом, расстояние между этими двумя транспортными средствами снова увеличится. Это проиллюстрировано графиком расстояния внизу на фиг. 4, где расстояние между тягачом с системой ACC и грузовиком с прицепом представлено непрерывной линией. Расстояние увеличивается до тех пор, пока в первый момент (1) функция системы ACC не понизит фактическую скорость Vpres ACC тягача до значения скорости грузовика с прицепом, то есть Vpres ACC=v2, и в итоге через некоторое время расстояние является постоянным. После этого расстояние снова медленно увеличивается, поскольку скорость тягача дополнительно снижается, то есть Vpres ACC=v3 на основе ввода.
При этом фактическая скорость vpres ACC, таким образом, находится под влиянием ввода пользователя/водителя. Водитель будет, таким образом, чувствовать, что его ввод имеет большое значение, и что он имеет реальный контроль над транспортным средством.
Фиг. 4 также иллюстрирует, какими будут скорость и расстояние между транспортными средствами, если бы тягач был оборудован традиционной системой круиз-контроля (CC), не использующей радар для корректирования скорости транспортного средства на основе скорости движущегося впереди транспортного средства. Это было описано выше со ссылкой на фиг. 3.
При этом следует отметить, что соответствующие заданные скорости для системы ACC и традиционной системы круиз-контроля, то есть vset ACC и vset CC, в конечном счете отличаются в этом примере, то есть vset ACC≠vset CC, и что соответствующие скорости vdhsc ACC и vdhsc CC тормоза постоянной скорости отличаются в этом примере, то есть vdhsc ACC≠vdhsc CC.
Как упомянуто выше, система круиз-контроля с регулированием расчетной скорости пытается, когда возможно, сохранить скорость транспортного средства в пределах диапазона между общей самой низкой допустимой скоростью vmin glob и общей самой высокой допустимой скоростью vmax glob.
В соответствии с вариантом осуществления настоящего изобретения пользовательский ввод приводит к установке заданной скорости vset равной значению, соответствующему наибольшей из текущей скорости vpres и общей самой низкой допустимой скорости vmin glob. Другими словами, наибольшее значение будет тогда использоваться в качестве нового значения для заданной скорости vset.
В соответствии с другим вариантом осуществления настоящего изобретения ввод водителя приводит к установке заданной скорости vset равной значению, соответствующему наименьшей из текущей скорости vpres и общей самой высокой допустимой скорости vmax glob. Другими словами, наименьшее значение будет тогда использоваться в качестве нового значения для заданной скорости vset.
Очень выгодно с точки зрения безопасности дорожного движения, что водитель транспортного средства может сконцентрироваться на управлении и может сосредоточить свое внимание на предстоящем участке дороги. Поэтому очень выгодно иметь возможность управлять заданной скоростью vset просто и посредством небольшого количества вводов.
В соответствии с вариантом осуществления изобретения корректировка, внесенная в заданную скорость vset, применяется до тех пор, пока новое значение не будет выбрано для заданной скорости vset, то есть пока новая заданная скорость vset не будет выбрана посредством пользовательского ввода системы круиз-контроля с регулированием расчетной скорости. Это выгодно, поскольку водитель может чувствовать полный контроль над заданной скоростью vset.
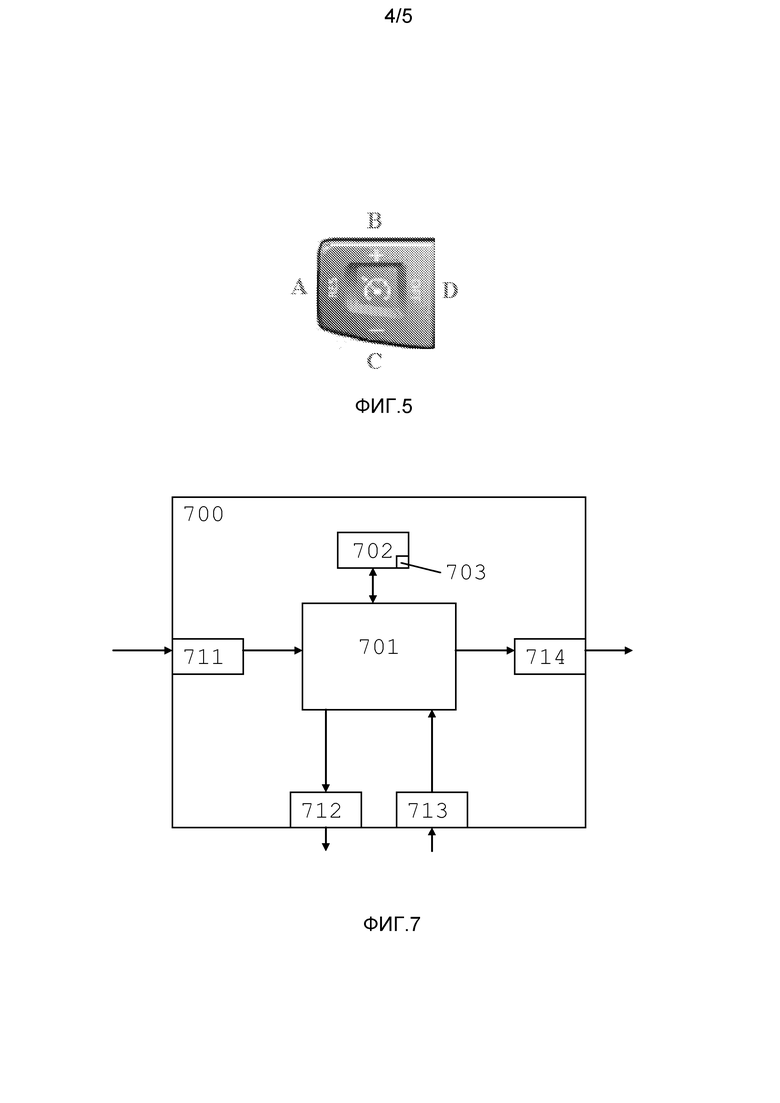
В соответствии с вариантом осуществления настоящего изобретения пользовательский ввод может быть выполнен посредством одного или более устройств ввода данных, например, одного или более устройств из группы, состоящей из кнопки, рычага, круглой рукоятки, педали, сенсорного экрана, устройства голосового ввода данных и пункта меню, например, на экране визуального представления. В значительной степени все типы устройств ввода данных могут использоваться водителем, чтобы поместить информацию в систему круиз-контроля с регулированием расчетной скорости в соответствии с изобретением.
Фиг. 5 иллюстрирует неограничивающий пример устройства ввода данных в форме кнопки, которое может использоваться в соответствии с изобретением. Эта кнопка доступна в кабине водителя. Например, она может быть расположена на руле и, таким образом, быть легко достижима для водителя.
Возможные применения различных описанных выше вариантов осуществления изобретения описаны ниже на основе кнопки на фиг. 5. Эти применения представляют неограничивающие примеры использования изобретения и описаны для улучшения понимания изобретения. Аналогичные применения безусловно могут быть реализованы с помощью любых других описанных выше устройств ввода данных, кроме кнопки на фиг. 5.
В соответствии с первым примером расчетная скорость vref является первоначально ниже заданной скорости vset, например, потому что система круиз-контроля с регулированием расчетной скорости является системой ACC, и транспортное средство движется впереди более медленно, чем выбранная пользователем заданная скорость vset. В иллюстрируемых ниже вариантах осуществления величина, принятая для соответствующих восходящих и нисходящих корректировок vadj заданной скорости vset, равна единице (1).
В соответствии с описанным выше вариантом осуществления изобретения, когда корректировка на основе ввода приводит к установке заданной скорости vset, равной значению vpres текущей скорости, то есть vset=vpres, следующие соответствующие вводы посредством кнопки на фиг. 5 могут приводить к следующим результатам в этом первом примере:
- Ввод = "A": никакого воздействия на vset
- Ввод = "B": vset=vset, old+1
- Ввод = "C": vset=vpres
- Ввод = "D": система круиз-контроля выключена
В соответствии с описанным выше вариантом осуществления изобретения, когда корректировка на основе ввода приводит к установке заданной скорости vset, равной скорректированному вниз значению vpres-vadj текущей скорости, то есть vset=vpres-vadj, следующие соответствующие вводы посредством кнопки на фиг. 5 могут приводить к следующим результатам в этом первом примере:
- Ввод = "A": никакого воздействия на vset
- Ввод = "B": vset=vset, old+1
- Ввод = "C": vset=vpres-1
- Ввод = "D": система круиз-контроля выключена
В соответствии со вторым примером расчетная скорость vref первоначально выше заданной скорость vset, например, перед подъемом, перед которым расчетной скорости vref разрешено повышаться в системе круиз-контроля с регулированием расчетной скорости.
В соответствии с описанным выше вариантом осуществления изобретения, когда корректировка на основе ввода приводит к установке заданной скорости vset, равной значению vpres текущей скорости, то есть vset=vpres следующие соответствующие вводы посредством кнопки на фиг. 5 могут приводить к следующим результатам в этом втором примере:
- Ввод = "A": никакого воздействия на vset
- Ввод = "B": vset=vpres
- Ввод = "C": vset=vset, old-1
- Ввод = "D": система круиз-контроля выключена
В соответствии с описанным выше вариантом осуществления изобретения, когда корректировка на основе ввода приводит к установке заданной скорости vset, равной скорректированному вверх значению vpres+vadj текущей скорости, то есть vset=vpres+vadj, следующие соответствующие вводы посредством кнопки на фиг. 5 могут приводить к следующим результатам в этом втором примере:
- Ввод = "A": никакого воздействия на vset
- Ввод = "B": vset=vpres+1
- Ввод = "C": vset=vset, old-1
- Ввод = "D": система круиз-контроля выключена
В соответствии с вариантом осуществления настоящего изобретения и восходящие, и нисходящие корректировки заданной скорости vset основаны на текущей скорости vpres. В этом варианте осуществления следующие соответствующие вводы посредством кнопки на фиг. 5 могут приводить к следующим результатам в этом втором примере:
- Ввод = "A": никакого воздействия на vset
- Ввод = "B": vset=vpres+1
- Ввод = "C": vset=vpres-1
- Ввод = "D": система круиз-контроля выключена
В описанных выше примерах величина соответствующих восходящих и нисходящих корректировок vadj заданной скорости vset проиллюстрирована значением один (1), но их величина в соответствии с изобретением также может принимать другие значения. Соответствующие восходящие и нисходящие корректировки vadj в соответствии с изобретением имеют значение, связанное с величиной заданной скорости vset, например, они могут иметь значение, соответствующее проценту x от заданной скорости vset, то есть vadj=vset*x%. В соответствии с вариантом осуществления изобретения пользователь может самостоятельно выбрать величину соответствующих восходящих и нисходящих корректировок vadj.
Фиг. 6 является блок-схемой последовательности операций для способа в соответствии с настоящим изобретением. Способ начинается на первом этапе [601]. В качестве второго этапа [602] разрешается корректировка по меньшей мере заданной скорости vset, когда расчетная скорость vref отличается от заданной скорости vset. В качестве третьего этапа [603] корректировка по меньшей мере частично основывается на пользовательском вводе и на текущей скорости vpres.
Настоящее изобретение также имеет отношение к системе круиз-контроля с регулированием расчетной скорости, выполненной с возможностью требовать от системы двигателя расчетную скорость vref, которая может отличаться от выбранной заданной скорости vset. Система круиз-контроля с регулированием расчетной скорости в соответствии с изобретением содержит блок корректировки, выполненный с возможностью разрешать корректировку по меньшей мере заданной скорости vset, когда она отличается от расчетной скорости vref, то есть когда vref≠vset. Блок корректировки также выполнен с возможностью основывать корректировки по меньшей мере частично на текущей скорости vpres транспортного средства и на пользовательском вводе системы круиз-контроля с регулированием расчетной скорости.
Специалист в области техники поймет, что способ для системы круиз-контроля с регулированием расчетной скорости в соответствии с настоящим изобретением также может быть реализован в компьютерной программе, которая при ее исполнении на компьютере побуждает компьютер применять способ. Компьютерная программа обычно принимает форму компьютерного программного продукта 703 на фиг. 7, сохраненного на цифровом носителе, и содержится на машиночитаемом носителе такого продукта, который содержит подходящую память, например, постоянное запоминающее устройство (ROM; ПЗУ), программируемое постоянное запоминающее устройство (PROM; ППЗУ), стираемое программируемое постоянное запоминающее устройство (EPROM; СППЗУ), флэш-память, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM; ЭСППЗУ), накопитель на жестком диске и т.д.
Фиг. 7 схематично изображает блок 700 управления, содержащий блок 701 вычисления, который может принять форму в значительной степени любого подходящего типа процессора или микрокомпьютера, например, схемы для цифровой обработки сигналов (процессора цифровых сигналов, DSP), или схемы с предопределенной заданной функцией (специализированной интегральной схемы, ASIC). Блок 701 вычисления соединен с блоком 702 памяти, который расположен в блоке 700 управления и который обеспечивает блок вычисления, например, сохраненным программным кодом и/или сохраненными данными, над которыми блок вычисления должен выполнить вычисления. Блок вычисления также выполнен с возможностью сохранять частичные или окончательные результаты вычислений в блоке памяти.
Блок 700 управления дополнительно снабжен соответствующими устройствами 711, 712, 713, 714 для приема и отправки сигналов ввода и вывода. Эти сигналы ввода и вывода могут содержать формы волны, импульсы или другие атрибуты, которые устройства 711, 713 приема входных сигналов могут обнаружить как информацию, и которые могут быть преобразованы в сигналы, которые может обработать блок 701 вычисления. Эти сигналы затем подаются на блок вычисления. Устройства 712, 714 отправки выходных сигналов выполнены с возможностью преобразовывать сигналы, принятые от блока 701 вычисления, чтобы, например, модулируя их, создать выходные сигналы, которые могут быть переданы другим частям системы круиз-контроля с регулированием расчетной скорости.
Каждое из соединений с соответствующими устройствами для приема и отправки сигналов ввода и вывода может принять форму одного или более элементов группы, состоящей из кабеля, шины данных, например, шины контроллерной сети (CAN), шины передачи данных мультимедийных систем (MOST) или шины некоторой другой конфигурации, или беспроводного соединения.
Специалисту в данной области техники должно быть понятно, что упомянутый выше компьютер может принимать форму блока 701 вычисления, и что упомянутая выше память может принимать форму блока 702 памяти.
Специалисту в данной области техники должно быть понятно, что описанная выше система может быть изменена в соответствии с различными вариантами осуществления способа в соответствии с изобретением. Изобретение также имеет отношение также к механическому транспортному средству, например, автомобилю, грузовику или автобусу, снабженному по меньшей мере одной системой круиз-контроля с регулированием расчетной скорости в соответствии с изобретением.
Настоящее изобретение не ограничено своими описанными выше вариантами осуществления, но имеет отношение и содержит все варианты осуществления в защищенном объеме приложенных независимых пунктов формулы изобретения.
Предложена система круиз-контроля с регулированием расчетной скорости, которая требует от системы двигателя транспортного средства расчетную скорость Vref, которая может отличаться от выбранной заданной скорости Vset. Система содержит блок корректировки, который выполнен с возможностью разрешать корректировку заданной скорости Vset, когда расчетная скорость Vref отличается от заданной скорости Vset. Корректировку основывают частично на текущей скорости Vpres транспортного средства и на пользовательском вводе системы круиз-контроля. Предложен также способ регулирования расчетной скорости. Достигается экономия топлива, удобство и безопасность вождения. 2 н. и 8 з.п. ф-лы, 7 ил.
1. Способ для системы круиз-контроля с регулированием расчетной скорости, которая требует от системы двигателя транспортного средства расчетную скорость vref, которая может отличаться от выбранной заданной скорости vset, отличающийся тем, что корректировка по меньшей мере упомянутой заданной скорости vset разрешена, когда упомянутая расчетная скорость vref отличается от упомянутой заданной скорости vset, и эта корректировка основана, по меньшей мере частично, на текущей скорости vpres упомянутого транспортного средства и на пользовательском вводе упомянутой системы круиз-контроля с регулированием расчетной скорости.
2. Способ по п. 1, в котором упомянутая корректировка приводит к установке упомянутой заданной скорости vset равной упомянутой текущей скорости vpres, то есть vset=vpres.
3. Способ по п. 1, в котором упомянутая корректировка приводит к установке упомянутой заданной скорости vset, равной скорректированному вверх значению vpres+vadj упомянутой текущей скорости, то есть vset=vpres+vadj.
4. Способ по п. 1, в котором упомянутая корректировка приводит к установке упомянутой заданной скорости vset, равной скорректированному вниз значению vpres-vadj упомянутой текущей скорости, то есть vset=vpres-vadj.
5. Способ по любому из пп. 1-4, в котором упомянутая корректировка приводит к установке упомянутой заданной скорости vset, равной значению, соответствующему наибольшей из упомянутой текущей скорости vpres и общей самой низкой допустимой скорости vmin glob.
6. Способ по любому из пп. 1-4, в котором упомянутая корректировка приводит к установке упомянутой заданной скорости vset равной значению, соответствующему наименьшей из упомянутой текущей скорости vpres и общей самой высокой допустимой скорости vmax glob.
7. Способ по любому из пп. 1-4, в котором упомянутая корректировка упомянутой заданной скорости vset применима до тех пор, пока не выбрано новое значение для упомянутой заданной скорости vset.
8. Способ по любому из пп. 1-4, в котором упомянутый ввод производится посредством по меньшей мере одного из следующих устройств ввода данных:
- кнопки,
- рычага,
- рукоятки,
- педали,
- сенсорного экрана,
- устройства голосового ввода данных и
- пункта меню.
9. Способ по любому из пп. 1-4, в котором упомянутая система круиз-контроля с регулированием расчетной скорости является
- либо адаптивной системой круиз-контроля (ACC),
- либо системой круиз-контроля, которая использует знание о предстоящих участках дороги.
10. Система круиз-контроля с регулированием расчетной скорости, которая требует от системы двигателя транспортного средства расчетную скорость vref, которая может отличаться от выбранной заданной скорости vset, отличающаяся блоком корректировки, выполненным с возможностью разрешать корректировку по меньшей мере упомянутой заданной скорости vset, когда упомянутая расчетная скорость vref отличается от упомянутой заданной скорости vset, и основывать упомянутую корректировку по меньшей мере частично на текущей скорости vpres упомянутого транспортного средства и на пользовательском вводе упомянутой системы круиз-контроля с регулированием расчетной скорости.
| US20080162011A1, 03.07.2008 | |||
| Устройство для автоматического регулирования скорости транспортных средств | 1988 |
|
SU1618681A1 |
| JP2001328452A, 27.11.2001. | |||

