Область техники
Настоящее изобретение относится к модулю и способу для определения значений контрольной точки скорости для системы управления транспортного средства (автомобиля) согласно независимым пунктам формулы изобретения.
Уровень техники
В настоящее время многие автомобили оборудуются круиз-контролем для облегчения вождения. Водитель может задавать желаемую скорость, например, с помощью устройства управления на пульте, встроенном в рулевое колесо, и после этого система круиз-контроля в автомобиле предписывает системе управления ускорять или тормозить автомобиль для поддержания желаемой скорости. Если автомобиль оборудован системой автоматического переключения передач, она переключает передачи таким образом, чтобы автомобиль мог поддерживать желаемую скорость.
Когда круиз-контроль используется в холмистой местности, система круиз-контроля будет пытаться поддерживать заданную скорость на подъеме. Это приводит, между прочим, к ускорению автомобиля при прохождении через вершину холма и, возможно, на последующем спуске, до последующего торможения во избежание превышения заданной скорости. Такой режим езды сопряжен с повышенным расходом топлива.
Изменение скорости автомобиля в холмистой местности позволяет сэкономить топливо по сравнению с традиционным круиз-контролем. Это можно делать по-разному, например, вычисляя текущее состояние автомобиля (как в Scania Ecocruise ®). В случае вычисления подъема, система затем ускоряет автомобиль на подъеме. К концу подъема, система запрограммирована избегать ускорения, пока уклон не выровняется на вершине, при условии, что скорость автомобиля не падает ниже определенного уровня. Снижение скорости в конце подъема позволяет восстанавливать ее на последующем спуске без необходимости использовать двигатель для ускорения. Когда автомобиль достигает нижней точки впадины, система стремится использовать кинетическую энергию чтобы начать следующий подъем на более высокой скорости, чем обычный круиз-контроль. Система обеспечивает небольшое ускорение в конце спуска для поддержания импульса автомобиля. В холмистой местности, это означает, что автомобиль начинает следующий подъем со скоростью, превышающей нормальную. Топливо можно экономить, избегая ненужного ускорения и расходуя кинетическую энергию автомобиля.
Снабжение автомобиля системой GPS и картографическими данными с топологической информацией позволяет снабжать экономичный круиз-контроль информацией о предстоящих сопротивлениях движению. Таким образом, опорную скорость автомобиля можно оптимизировать для разных типов дороги для экономии топлива.
Разные водители часто имеют разные потребности и желания в отношении поведения круиз-контроля в соответствии со своими предпочтениями, например, водитель может не иметь желания постоянно концентрироваться на экономии топлива, но может иметь желание, вместо этого, сократить время поездки.
В патенте EP0838363 описаны способ и устройство для управления скоростью автомобиля с использованием традиционного или адаптивного круиз-контроля. Водитель может изменять поведение автомобиля, изменяя предельные значения в круиз-контроле в отношении того, насколько автомобиль может ускоряться или замедляться, и, таким образом, переключаться между спортивным режимом и комфортным режимом.
Задачей изобретения является предложение усовершенствованной системы для управления скоростью автомобиля, которая повышает водительское одобрение круиз-контроля автомобиля и, в частности, учитывает предстоящие сопротивления движению.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеописанная задача решается посредством модуля для определения значений контрольной точки скорости vref для системы управления автомобиля, содержащего блок выбора режима для задания режима езды, выбираемого, например, водителем автомобиля, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref. Модуль дополнительно содержит блок горизонта, выполненный с возможностью определения горизонта с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента, и процессорный блок, выполненный с возможностью вычисления vref для системы управления автомобиля вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном нижним и верхним предельными значениями vmin и vmax, и система управления управляет автомобилем согласно этим значениям контрольной точки.
Согласно другому аспекту задача решается посредством способа определения значений контрольной точки скорости vref для системы управления автомобиля, причем способ содержит прием выбора режима, выбираемого, например, водителем автомобиля, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref, и определение горизонта с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента, и вычисление vref для системы управления автомобиля вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном vmin и vmax, и система управления управляет автомобилем согласно этим значениям контрольной точки.
Тот факт, что водитель сам может определять, как нужно поддерживать скорость автомобиля, выбирая между различными режимами езды, позволяет ему согласовывать поведение автомобиля с интенсивностью движения, типом дороги или своим темпераментом, что, таким образом, повышает водительское одобрение использования системы. Например, иногда желательно сократить время поездки вместо того, чтобы вести автомобиль в режиме экономии топлива, и в этом случае водитель может выбрать режим езды, чтобы настроить автомобиль на сокращение времени поездки.
Например, экономичный режим, который может приводить к большим изменениям скорости автомобиля, можно сменить на нормальный режим ввиду увеличения интенсивности движения. Большие изменения скорости автомобиля могут, так или иначе, вызывать раздражение у других участников движения. Нормальный режим больше напоминает традиционный круиз-контроль, обеспечивая более приемлемый режим езды в условиях высокой интенсивности движения. Благодаря смене режима езды, автомобиль может выбирать допустимый диапазон скоростей, моменты переключения передач для автоматической системы передач, допустимые уровни ускорения и т.д.
Тот факт, что режим езды охватывает несколько настроек, упрощает для водителя настройку автомобиля таким образом, чтобы добиться определенного эффекта вождения, избавляя от необходимости вводить каждую настройку в отдельности.
Когда прогнозируется рост или снижение скорости автомобиля выше или ниже предварительно определенных порогов вокруг установленной контрольной точки скорости, выбранной водителем, алгоритм пытается отрегулировать опорную скорость (т.е. скорость, которую модуль применяет к круиз-контролю автомобиля) на предыдущих сегментах горизонта (ближе к автомобилю) в указанном диапазоне vmin-vmax.
Предпочтительные варианты осуществления описаны в зависимых пунктах формулы изобретения и подробном описании.
КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ
Изобретение описано ниже со ссылкой на прилагаемые чертежи, в которых:
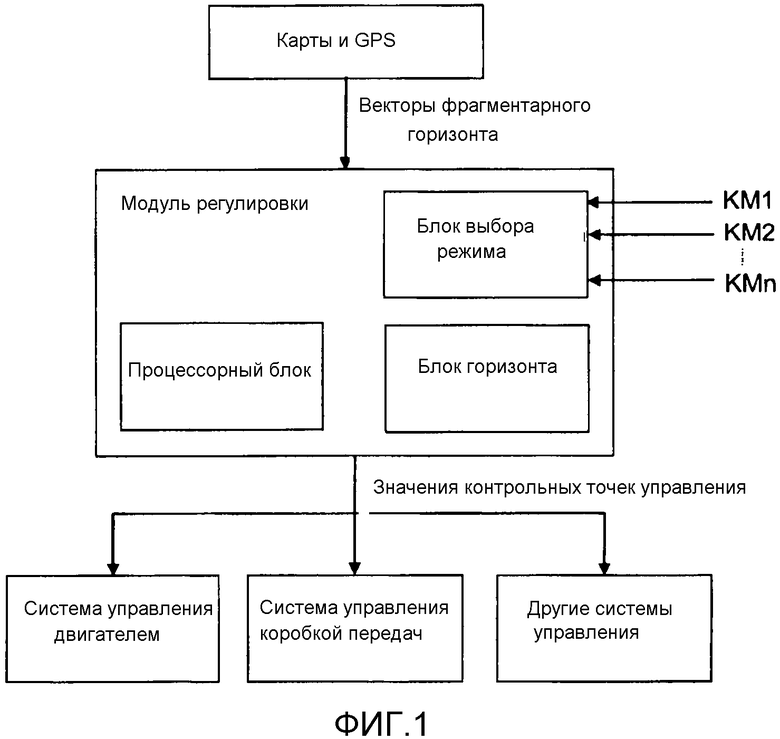
фиг. 1 изображает включение функционала модуля в автомобиль согласно варианту осуществления изобретения.
Фиг. 2 - блок-схема этапов, которые модулю предназначено осуществлять, согласно варианту осуществления изобретения.
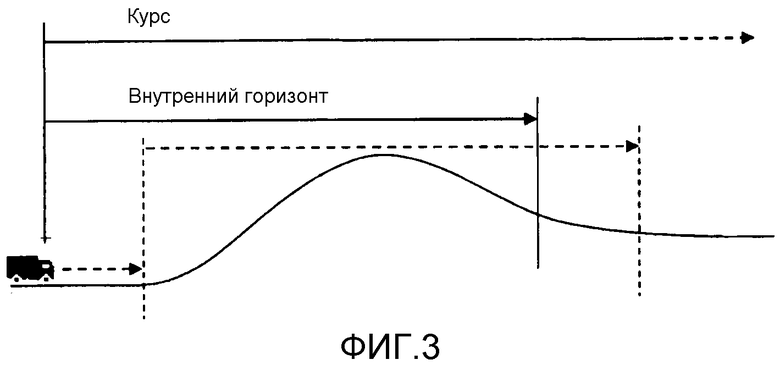
Фиг. 3 иллюстрирует длину горизонту системы управления по отношению к длине курса для автомобиля.
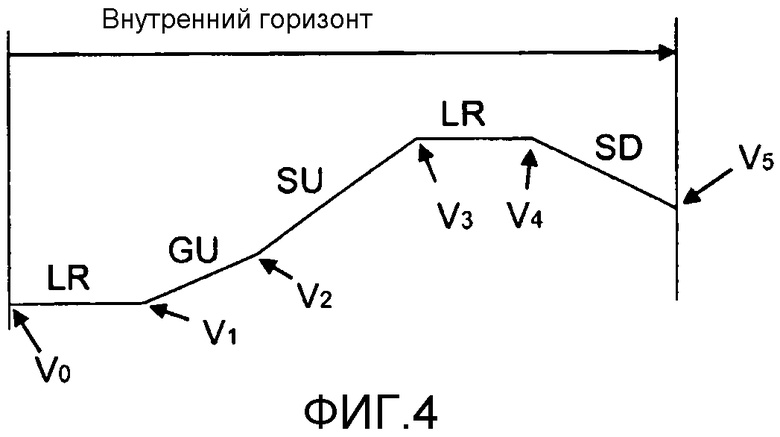
Фиг. 4 иллюстрирует различные прогнозируемые скорости автомобиля и категории сегментов, которые непрерывно обновляются по мере того, как новые сегменты постепенно добавляются к горизонту.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Информацию о курсе автомобиля можно использовать для регулировки его опорной скорости vref для круиз-контроля в автомобиле при его использовании для экономии топлива, повышения безопасности и улучшения комфорта. Можно также регулировать другие значения контрольной точки для других систем управления. Топография значительно влияет на управление, в частности, силовой передачей большегрузных автомобилей, поскольку на подъеме требуется гораздо больший крутящий момент, чем на спуске, чтобы можно было преодолевать некоторые подъемы без переключения передач.
Автомобиль снабжен системой позиционирования и картографической информацией, и данные местоположения из системы позиционирования и данные топологии из картографической информации используются для построения горизонта, который представляет характер курса. В описании настоящего изобретения, GPS (Глобальная система позиционирования) указана для определения данных местоположения для автомобиля, но можно применять и другие виды глобальных или региональных систем позиционирования для обеспечения данных местоположения автомобиля, например системы, где для определения местоположения автомобиля используются радиоприемники. Автомобиль также может использовать датчики для сканирования окружения и, таким образом, определять свое местоположение.
Фиг. 1 иллюстрирует, как модуль согласно изобретению включает в себя информацию карт и GPS о курсе. Курс представлен ниже как единичный маршрут для автомобиля, но очевидно, что различные возможные курсы включаются в качестве информации посредством карт и GPS или других систем позиционирования. Водитель также может регистрировать исходный пункт и пункт назначения для назначенной поездки, и в этом случае блок использует картографические данные и т.д. для вычисления подходящего маршрута. Блок с картами и системой позиционирования может, в качестве альтернативы, составлять часть системы, предназначенной для использования регулирующих значений контрольной точки. Курс или, при наличии двух или более возможных альтернатив, курсы, побитово передаются через CAN (контроллерную сеть), систему последовательной шины, особенно пригодную для автомобилей, на модуль для регулировки значений контрольной точки. В модуле регулировки, биты совместно помещаются в блок горизонта для построения горизонта и обрабатываются процессорным блоком для создания внутреннего горизонта, на котором система управления может осуществлять регулировку. При наличии двух или более альтернативных курсов, аналогичное количество внутренних горизонтов создается для различных альтернатив. Система управления может быть любой из различных систем управления в автомобиле, например, системой управления двигателем, системой управления коробкой передач или другой системой управления. Горизонт обычно строится для каждой системы управления, поскольку системы управления регулируют разные параметры. Затем горизонт непрерывно пополняется новыми битами из блока с GPS и картографическими данными для поддержания нужной длины горизонта. Таким образом, горизонт непрерывно обновляется, когда автомобиль находится в движении.
CAN представляет собой систему последовательной шины, специально разработанную для использования в автомобилях. Шина данных CAN позволяет осуществлять обмен цифровыми данными между датчиками, регулировочными компонентами, приводами, устройствами управления и т.д. и гарантирует, что два или более устройства управления могут иметь доступ к сигналам от данного датчика, чтобы использовать их для управления компонентами, подключенными к ним.
Настоящее изобретение относится к модулю для определения значений контрольной точки скорости vref для системы управления автомобиля, причем модуль схематически показан на фиг. 1.
Модуль содержит блок выбора режима, выполненный с возможностью задания режима езды, выбираемого, например, водителем автомобиля, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref. Различные режимы езды обозначены на фиг. 1 как KM1, KM2,..., KMn, и, таким образом, водитель может выбирать из некоторого количества n режимов езды.
Модуль дополнительно содержит блок горизонта, выполненный с возможностью определения горизонта с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента, и процессорный блок, выполненный с возможностью вычисления vref для системы управления автомобиля вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном vmin и vmax, и система управления управляет автомобилем согласно этим значениям контрольной точки.
Результатом является модуль, который можно использовать в автомобиле для задания вычислений vref согласно пожеланиям водителя. Водитель производит выбор режима, например, с использованием устройства управления, и, таким образом, задает различные параметры и/или функции. Это означает, что ему не нужно осуществлять несколько настроек по отдельности, поскольку они могут вступать в силу посредством единого выбора режима. Поскольку настройки конкретно выбираются для достижения нужного эффекта, водителю не требуются знания эксперта, чтобы производить настройку автомобиля так, чтобы он управлялся желаемым образом. Модуль может составлять часть системы управления, значения контрольной точки которой предназначены для регулировки, или может быть автономным модулем, независимым от системы управления.
vset это заданная скорость, выбранная водителем, которую система управления автомобиля должна поддерживать в некотором диапазоне в процессе движения. Диапазон ограничен двумя скоростями vmin и vmax. Согласно предпочтительному варианту осуществления выбор режима задает диапазон между vmin и vmax, который, таким образом, определяет пределы вокруг vset, между которыми vref разрешено изменяться. Затем выбор режима предписывает процессорному блоку выполнять инструкции, которые задают ширину диапазона между vmin и vmax. Таким образом, можно задавать диапазон, в котором vref разрешено изменяться, и, следовательно, как вести автомобиль в режиме экономии топлива. Большой диапазон обеспечивает большую гибкость в экономии топлива, чем меньший диапазон. Согласно варианту осуществления диапазон асимметричен относительно vset. Если большая часть диапазона располагается ниже vset, возможна большая экономия топлива, поскольку vref разрешено сильнее снижаться. Если большая часть диапазона располагается выше vset, существует возможность сокращения времени поездки, поскольку vref разрешено сильнее увеличиваться, что допускает более высокую среднюю скорость. В данном случае, задано четыре разные настройки ширина диапазона, а именно “максимальная ширина диапазона”, “средняя ширина диапазона”, “минимальная ширина диапазона” и “равномерная ширина диапазона”. Диапазон зависит от заданной скорости, выбранной водителем, и, предпочтительно, составляет некоторый процент от заданной скорости. В этом примере, диапазоны задаются как абсолютные значения. “Максимальная ширина диапазона” составляет от 13 до 20 км/ч, например, от -12 до +3 км/ч вокруг 80 км/ч. “Средняя ширина диапазона” составляет от 6 до 12 км/ч, например, от -8 до +3 км/ч вокруг 80 км/ч, и “минимальная ширина диапазона” составляет от 0 до 5 км/ч, например, от 0 до +5 км/ч вокруг 80 км/ч. “Равномерная ширина диапазона” составляет от 2 до 16 км/ч и равномерно распределена вокруг vref, например, от -5 до +5 км/ч вокруг 80 км/ч. Тем не менее, возможны другие значения помимо приведенных в данном описании в порядке примера.
Согласно варианту осуществления выбор режима определяет допустимое ускорение и/или замедление для регулировки скорости автомобиля. Выбор режима предписывает процессорному блоку задавать допустимое ускорение и замедление для регулировки скорости, и это позволяет обеспечивать желаемый комфорт в ущерб экономии топлива, и наоборот. Критерий комфорта, таким образом, ограничивает допустимое ускорение и/или замедление для автомобиля. Три разные настройки ускорения и замедления задаются здесь как “максимальное допустимое ускорение и/или замедление” от 1 до 3 м/с2, “среднее допустимое ускорение и/или замедление” от 0,5 до 1 м/с2, и “минимальное допустимое ускорение и/или замедление” от 0,02 до 0,5 м/с2. Тем не менее, возможны другие значения помимо приведенных в данном описании в порядке примера. Согласно варианту осуществления диапазоны также зависят от массы, и это означает, что “максимальное допустимое ускорение и/или замедление” и “среднее допустимое ускорение и/или замедление” в определенных ситуациях будут одинаковыми для большегрузного автомобиля, поскольку, развивая тормозящий момент или максимальный крутящий момент двигателя автомобиль не может, соответственно, применять более чем среднее замедление или среднее ускорение в таких ситуациях. Также могут существовать физические ограничения, влияющие на диапазоны.
Согласно варианту осуществления желаемое увеличение или уменьшение скорости осуществляется за счет уклона согласно уравнению Торричелли (1) для вычисления постоянного ускорения и замедления подлежащего применению при вождении автомобиля, при условии, что это ускорение и/или замедление допустимо. Таким образом, выбор режима определяет пределы для обоих, что позволяет добиться нужного комфорта. Уравнение Торричелли (1) гласит
 ,
,
где vi - начальная скорость автомобиля в сегменте, vslut - его скорость в конце сегмента, a - постоянное ускорение/замедление, и s - длина сегмента.
Выбранные режимы езды также могут определять настройки в других системах в автомобиле, например, настройки в его системе автоматического выбора передачи, и затем процессорный блок обеспечивает применение этих настроек.
Выше описаны различные функции, которые можно задавать для достижения различных эффектов. Каждый режим езды KM1 … KMn содержит уникальный набор настроек, ниже будут описаны некоторые примеры возможных режимов езды, которые имеют различные эффекты в зависимости от их соответствующих настроек, которые определяют стиль вождения автомобиля. Эти режимы езды именуются здесь «экономичный», «комфортный», «мощный» и «нормальный».
Экономичный режим езды содержит настройки, которые делают ходовые качества автомобиля более экономичными, например, максимальную ширину диапазона между vmin и vmax и/или ускорение и/или замедление, которые наиболее предпочтительны с точки зрения экономии топлива, например, среднее допустимое ускорение и/или замедление. Большие значения ширины диапазона между vmin и vmax позволяют экономить больше топлива на неровных дорогах с существенными перепадами высот за счет увеличения возможности использования потенциальной энергии и кинетической энергии автомобиля на участках спуска. Водитель, выбирающий экономичный режим, может, таким образом, брать увеличенные изменения скорости автомобиля для экономии топлива. Согласно варианту осуществления диапазон скоростей ограничивается таким образом, чтобы скорость автомобиля могла только снижаться, для присвоения чтобы придать больший приоритет топливу, чем времени поездки. В экономичном режиме ускорение и/или замедление a в уравнении Торричелли (1), может, таким образом, быть больше. Изменение опорной скорости за счет уклона вниз согласно уравнению Торричелли (1) можно заменить регулировкой впрыска топлива, что объяснено ниже, для достижения экономичного по времени вождения автомобиля. Предполагается, что водитель готов смириться с ухудшением комфорта ради экономии топлива. Согласно варианту осуществления моменты понижения передачи в системах автоматического выбора передач смещаются в сторону более низких оборотов двигателя, чтобы понижения передачи происходили реже, и чтобы передачу можно было использовать дольше, переключая передачу при более высоких оборотах двигателя, чтобы затем чаще выполнять переключения передач на две или три ступени.
Комфортный режим езды содержит настройки, которые делают ходовые качества автомобиля более экономичными без ущерба комфорту, например, среднюю ширину диапазона между vmin и vmax, которая меньше, чем в экономичном режиме, и среднее допустимое ускорение и/или замедление, т.е. значение a в уравнении Торричелли (1), которое обеспечивает комфорт и ниже, чем значение, применяемое в экономичном режиме. В этом случае система автоматического выбора передачи работает в нормальном режиме.
Мощный режим езды содержит настройки, которые делают ходовые качества автомобиля более мощными, например, минимальную ширину диапазона между vmin и vmax, и/или разрешают максимальное допустимое ускорение и/или замедление. Предполагается, что водитель желает ощущать “мощность” в автомобиле и, в отличие от других режимов, экономии топлива отдается меньший приоритет, чем времени. Ускорение и замедление в данном случае зависят от характеристик двигателя и массы автомобиля. Также предпочтительно задавать изменение передач в холмистой местности в системе автоматического выбора передачи, и это означает, что автомобиль движется в общем случае, с более высокими оборотами двигателя.
Нормальный режим езды содержит настройки, которые делают ходовые качества автомобиля экономичными и комфортными, за счет равномерного распределения ширины диапазона вокруг заданной скорости vset. При этом предполагается, что водитель желает одновременно испытывать комфорт и экономить топливо, так что диапазон вокруг заданной скорости может составлять, например, от -5 до +5 км/ч вокруг 80 км/ч. В этом случае система автоматического выбора передачи, предпочтительно, работает в нормальном режиме.
Можно также иметь настройки, которые позволяют автомобилю сокращать время езды, не увеличивая при этом расход топлива. Эти настройки могут быть включены, например, в мощный режим или обеспечиваться отдельным режимом. В этом случае диапазон скоростей vmin-vmax будет таким, что приоритет отдается увеличениям скорости перед участками подъема, что преимущественно для времени поездки, тогда как перед участками крутого спуска скорость будет снижаться, хотя и немного, во избежание применения тормоза на спуске. Когда нужно применять снижение скорости, можно, например, регулировать подачу топлива. Регулировку подачи топлива можно осуществлять, например, путем снижения опорной скорости vref с таким большим шагом, что двигатель развивает тормозящий момент. Решающий момент для начала регулировки впрыска топлива выбирается так, чтобы достигалось желаемое снижение до входной скорости vi в сегменте, при условии, что это возможно. Затем процессорный блок в модуле вычисляет, когда нужно начинать регулировать впрыск топлива в двигатель, и отправляет соответствующие значения контрольной точки системе управления, когда приходит время регулировать подачу топлива. Таким образом, режим езды может определять, каким образом нужно осуществлять снижение скорости автомобиля, во избежание ненужного торможения. Регулировка подачи топлива увеличивает местную скорость автомобиля по сравнению с изменением его скорости за счет уклона вниз, например, согласно уравнению Торричелли (1). Увеличение скорости (ускорение автомобиля) можно производить за счет уклона перед крутыми подъемами, и в этом случае автомобиль не будет терять местную скорость на подъеме так сильно, как в отсутствие увеличения скорости перед подъемом. Вождение автомобиля в таком режиме позволяет сократить время поездки, не увеличивая при этом расход топлива.
Сокращение времени поездки, тем не менее, можно преобразовать в снижение расхода топлива за счет снижения средней скорости автомобиля.
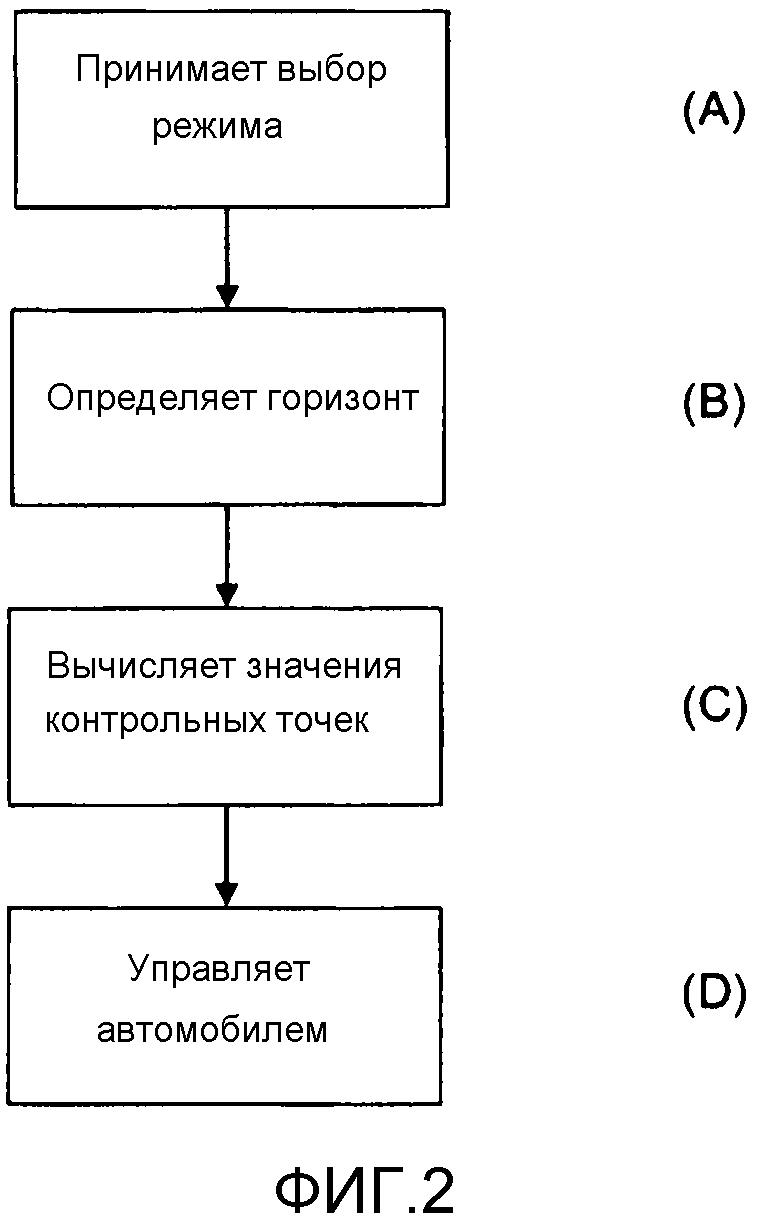
На Фиг. 2 показана блок-схема, схематически иллюстрирующая этапы способа согласно изобретению. Ниже будет рассмотрен пример только с одним горизонтом, но очевидно, что можно параллельно строить больше горизонтов для различных альтернативных курсов.
Способ содержит A) прием выбора режима, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref, B) определение горизонта с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента, C) вычисление vref для системы управления автомобиля вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном vmin и vmax, и D) управление автомобилем с помощью системы управления согласно этим значениям контрольной точки.
Результатом является способ, который повышает водительское одобрение круиз-контроля автомобиля, поскольку он может сам выбирать, какими эффектами круиз-контроля пользоваться.
Когда автомобиль находится в движении, модуль горизонта помещает биты совместно и постепенно для построения горизонта курса, причем длина горизонта обычно составляет порядка от 1 до 2 км. Блок горизонта отслеживает местонахождение автомобиля и непрерывно добавляет горизонт, в результате чего его длина остается постоянной. Согласно варианту осуществления, когда пункт назначения поездки находится в пределах длины горизонта, горизонт больше не добавляется, поскольку движение за пределы пункта назначения не имеет смысла.
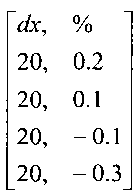
Горизонт состоит из сегментов маршрута, имеющих одну или более взаимосвязанных характеристик. Горизонт представлен здесь в виде матрицы, каждый столбец которой содержит характеристику сегмента. Матрица охватывающая 80 м вперед по курсу, может принимать следующую форму:
 ,
,
где в первом столбце указана длина каждого сегмента в метрах (dx), и во втором столбце указан уклон каждого сегмента в %. В данной матрице указано, что на протяжении 20 метров вперед от текущего местоположения автомобиля уклон составляет 0,2%, на протяжении следующих 20 метров уклон составляет 0,1%, и т.д. Значения для сегментов и уклоны не обязательно выражать в относительных значениях, но можно выражать в абсолютных значениях. Матрица, преимущественно, образована векторами, но вместо этого может иметь точечную структуру, выражаться пакетами данных и т.п. Существуют различные другие возможные характеристики, например, радиус кривизны, дорожные знаки, различные препятствия и т.д.
Согласно варианту осуществления процессорный блок выполнен с возможностью отнесения сегментов в горизонте к различным категориям и вычисления пороговых значений для упомянутой, по меньшей мере, одной характеристики сегментов, в зависимости от одного или более значений, зависящих от автомобиля, и эти пороговые значения служат границами для разделения сегментов на разные категории. В примере, где характеристиками сегментов являются уклоны, пороговые значения вычисляются для их уклонов. Пороговые значения для соответствующей характеристики вычисляются, согласно варианту осуществления изобретения, посредством одного или более значений, зависящих от автомобиля, например, текущего передаточного числа, текущей массы автомобиля, кривой максимального крутящего момента двигателя, механического трения и/или сопротивления движению автомобиля при текущей скорости. Модель автомобиля, внутренняя по отношению к системе управления, используется для оценивания сопротивлений движению при текущей скорости. Передаточное число и максимальный крутящий момент являются известными величинами в системе управления автомобиля, и масса автомобиля оценивается оперативно.
Ниже приведены примеры пяти разных категорий, к которым могут быть отнесены сегменты, когда их уклоны используются для принятия решений по управлению автомобилем:
Горизонтальная дорога: сегмент с нулевым уклоном ± допуск.
Крутой подъем: сегмент слишком крутой, чтобы автомобиль мог поддерживать скорость на текущей передаче.
Слабый подъем: сегмент с уклоном между допуском и пороговым значением для резкого подъема.
Крутой спуск: сегмент снижается так круто, что автомобиль ускоряется только за счет уклона.
Слабый спуск: сегмент с уклоном вниз между отрицательным допуском и пороговым значением для резкого спуска.
Согласно варианту осуществления изобретения характеристиками сегментов являются их длина и уклон, и отнесение их к вышеописанным категориям предусматривает вычисление пороговых значений в форме двух пороговых значений уклона lmin и lmax, где lmin - минимальный уклон, необходимый для того, чтобы автомобиль ускорялся на спуске только за счет уклона, и lmax - максимальный уклон, при котором автомобиль может поддерживать скорость на подъеме без переключения передач. Таким образом, автомобилем можно управлять согласно уклону и длине предстоящего участка дороги таким образом, чтобы его можно было вести в режиме экономии топлива посредством круиз-контроля в холмистой местности. В другом варианте осуществления, характеристиками сегментов являются их длина и поперечное ускорение, и пороговые значения вычисляются в виде пороговых значений поперечного ускорения, которые классифицируют сегменты по величине вызываемого ими поперечного ускорения. Тогда скорость автомобиля можно регулировать таким образом, чтобы его можно было вести в режиме, обеспечивающем экономию топлива и безопасность движения в отношении кривизны дороги, т.е. чтобы любое снижение скорости до изгиба, насколько возможно, осуществлялось без использования рабочих тормозов. Например, допуск для категории “горизонтальная дорога”, предпочтительно составляет от -0,05% до 0,05%, когда автомобиль движется со скоростью 80 км/ч. На основании той же скорости (80 км/ч), вычисление lmin обычно дает порядка от -2 до -7%, и для lmax обычно от 1 до 6%. Однако эти значения в значительной степени зависят от текущего передаточного числа (передач + фиксированного передаточного числа заднего дифференциала), характеристик двигателя и полной массы.
Затем характеристики, в данном случае уклон, каждого сегмента сравниваются с вычисленными пороговыми значениями, и каждый сегмент причисляется к той или иной категории на основании сравнений. Это можно делать вместо или помимо, например, аналогичной классификации по радиусу кривизны дороги, что позволяет классифицировать изгибы по величине вызываемого ими поперечного ускорения.
После того, как каждый сегмент в горизонте отнесен к той или иной категории, внутренний горизонт для системы управления можно построить на основании классификации сегментов и горизонта, содержащего для каждого сегмента входные скорости vi, на которые должна ориентироваться система управления. Согласно варианту осуществления изменение скорости, необходимое между двумя входными скоростями vi, изменяется за счет уклона для обеспечения системы управления значениями контрольной точки vref, которые обеспечивают постепенное увеличение или уменьшение скорости автомобиля. Изменение скорости за счет уклона приводят к последовательному вычислению изменений скорости, которые необходимо производить для достижения изменения скорости. Другими словами, изменение скорости за счет уклона приводят к линейному увеличению скорости.
Входные скорости vi, т.е. значения контрольной точки для системы управления автомобиля, вычисляются вдоль горизонта согласно настройкам для выбранных режимов езды и правилам, относящимся к категориям, к которым отнесены сегменты в горизонте. Все сегменты в горизонте проходятся непрерывно, и, по мере добавления к горизонту новых сегментов, входные скорости vi постепенно регулируются в них при необходимости, в диапазоне опорной скорости vref автомобиля. Затем автомобиль управляется согласно значениям контрольной точки, и в описанном примере это означает, что система управления двигателем в автомобиле регулирует скорость автомобиля согласно значениям контрольной точки.
Таким образом различные правила для категорий сегментов определяют, как нужно регулировать входную скорость vi для каждого сегмента. Если сегмент отнесен к категории “горизонтальная дорога”, для него не производится никакого изменения входной скорости vi.
Если сегмент отнесен к категории “крутой подъем” или “крутой спуск”, конечная скорость vslut для него прогнозируется путем решения нижеследующего уравнения (2):
 ,
,
в котором





 ,
,
где Cd - коэффициент сопротивления воздуха, ρ - плотность воздуха, A - наибольшая площадь поперечного сечения автомобиля, Ftrack - сила, действующая в направлении движения автомобиля, обусловленная крутящим моментом двигателя, Froll - сила сопротивления качению, действующая на колеса, Fα - сила, действующая на автомобиль вследствие уклона α сегмента, Teng - крутящий момент двигателя, ifinal -конечная передача автомобиля, igear - текущее передаточное число в коробке передач, μgear - КПД системы передач, rwheel - радиус колеса автомобиля, M - масса, автомобиля, CaF и Cb - зависящие от скорости коэффициенты, связанные с сопротивлением качению колес, CrrisoF - постоянный член, связанный с сопротивлением качению колес, и viso - скорость ISO, например 80 км/ч.
На сегментах, относящихся к категории “крутой подъем”, конечная скорость vslut после этого сравнивается с vmin, и если vslut<vmin, то vi должна увеличиться на Δvin, где

Если ∆vin равно нулю или отрицательно, vi не изменяется.
На сегментах, относящихся к категории “крутой спуск”, конечная скорость vslut сравнивается с vmax, и если vslut>vmax, то vi должна уменьшиться на ∆vin, где

Если ∆vin равно нулю или отрицательно, vi не изменяется.
Согласно варианту осуществления уравнение Торричелли (1) используется для вычисления, возможно ли достичь vslut при входной скорости vi в соответствии с требованием комфорта, т.е. с предварительно определенным максимальным постоянным ускорением/замедлением. Это ускорение/замедление может определяться выбранными режимами езды. Если это невозможно вследствие длины сегмента, vi уменьшается или увеличивается так, чтобы можно было поддерживать нужное ускорение/замедление.
На сегментах, относящихся к категории “слабый подъем”, опорную скорость vref допустимо изменять между vmin и vset при включении нового сегмента, т.е. vmin≤vref≤vset. Если vref≥vmin, ускорение автомобиля не осуществляется. Если же vref<vmin, то vref применяется к vmin на протяжении сегмента, или если vref>vset, то vref изменяется за счет уклона в сторону vset согласно уравнению (1). На сегментах, относящихся к категории “слабый спуск”, vref допустимо изменять между vset и vmax при включении нового сегмента, т.е. vset≤vref≤vmax, и если vref≤vmax, замедление автомобиля не осуществляется. Если же vref>vmax, то vref применяется к vmax на протяжении сегмента, или если vref<vset, то vref регулируется в сторону vset, например согласно уравнению (1). Вышеперечисленные пять категорий сегментов можно сократить до трех, исключив “слабый подъем” и “слабый спуск". В этом случае категория “горизонтальная дорога” будет охватывать больший диапазон, ограниченный вычисленными пороговыми значениями lmin и lmax, поэтому уклон сегмента должен быть меньше lmin при отрицательном уклоне, или больше lmax при положительном уклоне.
Когда сегмент, который следует за сегментом в горизонте, относящимся к категории “слабый подъем” или “слабый спуск”, предписывает изменять входные скорости для сегментов, относящихся к этим категориям, это может означать, что входные скорости и, следовательно, контрольные точки скорости для системы управления корректируются и становятся выше или ниже, чем указано вышеозначенными правилами для категорий “слабый подъем” или “слабый спуск”. Это, таким образом, применяется при корректировке входных скоростей для сегментов для обслуживания последующих сегментов.
Необходимые изменения скорости можно, таким образом, осуществлять за счет уклона согласно уравнению Торричелли (1), чтобы они происходили в соответствии с требованием комфорта, или, если требуется снижение скорости, путем регулировки подачи топлива. Однако, вместо этого, изменение скорости может требоваться с полным применением мощности двигателя как в мощном режиме езды, когда водитель желает ощущать мощность в автомобиле. Таким образом, существует общее правило не увеличивать опорную скорость vref на подъеме, поскольку любое увеличение скорости vref должно происходить до начала подъема, если необходимо вести автомобиль в экономичном режиме. По этой же причине, опорная скорость vref не должна снижаться на спуске, поскольку любое возможное уменьшение скорости vref должно происходить до участка спуска.
Непрерывно проходя все сегменты в горизонте, можно определить внутренний горизонт, который обеспечивает прогнозируемые входные значения vi для каждого сегмента. Внутренний горизонт непрерывно обновляется по мере добавления в него новых сегментов, например, два-три раза в секунду. Непрерывное прохождение сегментов в горизонте предусматривает непрерывное вычисление входных значений vi для каждого сегмента, и это может приводить к необходимости изменять входные значения как впереди, так и позади во внутреннем горизонте. Например, когда прогнозируемая скорость на сегменте лежит вне заданного диапазона, желательно скорректировать скорость в предыдущих сегментах.
Фиг. 3 изображает внутренний горизонт относительно курса. Внутренний горизонт непрерывно перемещается вперед, как указано пунктирной линией внутреннего горизонта, смещенной вперед. Фиг. 4 изображает пример внутреннего горизонта, в котором различные сегменты отнесены к той или иной категории. На схеме “LR” обозначает “горизонтальную дорогу”, “GU” - “слабый подъем”, “SU” - “крутой подъем” и “SD” - “крутой спуск”. Скорость первоначально равна v0, и если она не равна vset, то генерируются значения контрольной точки от v0 до vset. Следующий сегмент является “слабым подъемом”, и никакого изменения vref не происходит при условии, что vmin≤vref≤vset. Следующий сегмент является “крутым подъемом”, поэтому конечная скорость v3 для него прогнозируется согласно формуле (2), и v2 должна увеличиваться, если v3<vmin, согласно формуле (9). Следующий сегмент является “горизонтальной дорогой”, поэтому vref регулируется в сторону vset. Затем следует сегмент, являющийся “крутым спуском”, поэтому конечная скорость v5 прогнозируется согласно формуле (2), и v4 должна уменьшаться, если v5>vmax, согласно формуле (10). Как только скорость позади во внутреннем горизонте изменяется, оставшиеся скорости позади в нем регулируются таким образом, чтобы удовлетворять требованиям к скорости далее вперед.
Настоящее изобретение содержит также компьютерный программный продукт, содержащий инструкции компьютерной программы, позволяющие компьютерной системе в автомобиле осуществлять этапы согласно способу, когда инструкции компьютерной программы выполняются на упомянутой компьютерной системе. Инструкции компьютерной программы, предпочтительно, хранятся на носителе, который может считываться компьютерной системой, например, CD ROM или USB-памяти, или могут передаваться по беспроводному каналу или по кабелю на компьютерную систему.
Настоящее изобретение не ограничивается вышеописанными вариантами осуществления. Можно использовать различные альтернативы, модификации и эквиваленты. Таким образом, вышеупомянутые варианты осуществления не ограничивают объем изобретения, который задан нижеследующей формулой изобретения.
При определении значений контрольной точки скорости 



1. Модуль для определения значений контрольной точки скорости vref для системы управления транспортного средства, отличающийся тем, что упомянутый модуль содержит
- блок выбора режима для задания режима езды, выбираемого, например, водителем транспортного средства, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref,
- блок горизонта, выполненный с возможностью определения горизонта с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента,
- процессорный блок, выполненный с возможностью вычисления vref для системы управления транспортного средства вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном vmin и vmax, причем система управления управляет транспортным средством согласно этим значениям контрольной точки vref.
2. Модуль по п. 1, в котором выбор режима определяет ширину диапазона между vmin и vmax.
3. Модуль по п. 1 или 2, в котором выбор режима определяет ускорение и/или замедление, допустимое для регулировки скорости транспортного средства.
4. Модуль по п. 1 или 2, в котором выбор режима определяет, каким образом нужно осуществлять снижение скорости транспортного средства во избежание ненужного торможения.
5. Модуль по п. 1, в котором выбранные режимы езды определяют настройки в других системах в транспортном средстве.
6. Модуль по п. 5, в котором выбранные режимы езды определяют настройки в системе автоматического выбора передачи транспортного средства.
7. Модуль по п. 6, в котором режим езды содержит настройки, которые делают ходовые качества транспортного средства более экономичными, с максимальной шириной диапазона между vmin и vmax и/или средним допустимым ускорением и/или замедлением.
8. Модуль по п. 7, в котором режим езды содержит настройки, которые делают ходовые качества транспортного средства более экономичными, без ущерба комфорту, со средней шириной диапазона между vmin и vmax и/или средним допустимым ускорением и/или замедлением.
9. Модуль по п. 7, в котором режим езды содержит настройки, которые делают ходовые качества транспортного средства более мощными, с минимальной шириной диапазона между vmin и vmax и/или максимальным допустимым ускорением и/или замедлением.
10. Модуль по п. 7, в котором режим езды содержит настройки, которые делают ходовые качества транспортного средства экономичными и комфортными, с равномерной шириной диапазона вокруг заданной скорости, выбранной водителем.
11. Модуль по п. 1, в котором процессорный блок выполнен с возможностью вычисления пороговых значений для упомянутой, по меньшей мере, одной характеристики сегментов, в зависимости от одного или более значений, зависящих от транспортного средства, причем пороговые значения служат границами для разделения сегментов на различные категории, для сравнения, по меньшей мере, одной характеристики каждого сегмента с вычисленными пороговыми значениями и для отнесения каждого сегмента к той или иной категории на основании результатов сравнений.
12. Модуль по п. 11, в котором значения, зависящие от транспортного средства, определяются текущим передаточным числом, текущей массой транспортного средства, кривой максимального крутящего момента двигателя, механическим трением и/или сопротивлением движению транспортного средства при текущей скорости.
13. Модуль по п. 1, в котором блок горизонта выполнен с возможностью непрерывного определения горизонта при условии, что он не отклоняется от намеченного курса для транспортного средства, и процессорный блок выполнен с возможностью непрерывного осуществления этапов для вычисления и обновления значений контрольной точки для системы управления на протяжении всей длины горизонта.
14. Способ определения значений контрольной точки скорости vref для системы управления транспортного средства, отличающийся тем, что способ содержит этапы, на которых
- принимают выбор режима, выбранный, например, водителем, по меньшей мере, из двух выбираемых режимов езды, каждый из которых содержит уникальный набор настроек, влияющих на вычисление vref,
- определяют горизонт с помощью принятых данных местоположения и картографических данных для курса, состоящих из сегментов маршрута и, по меньшей мере, одной характеристики для каждого сегмента,
- вычисляют vref для системы управления транспортного средства вдоль горизонта на основании настроек для выбранных режимов езды и правил, относящихся к категориям, к которым отнесены сегменты в горизонте, так что vref заключена в диапазоне, ограниченном vmin и vmax, причем система управления управляет транспортным средством согласно этим значениям контрольной точки vref.
15. Способ по п. 14, который содержит этап, на котором задают ширину диапазона между vmin и vmax.
16. Способ по п. 14 или 15, который содержит этап, на котором задают ускорение и/или замедление, допустимое для регулировки скорости транспортного средства.
17. Способ по п. 14 или 15, который содержит этап, на котором выбирают, каким образом нужно осуществлять снижение скорости транспортного средства во избежание ненужного торможения.
18. Способ по п. 14, который содержит этап, на котором применяют настройки в других системах в транспортном средстве.
19. Способ по п. 18, который содержит этап, на котором применяют настройки в системе автоматического выбора передачи транспортного средства.
20. Способ по п. 14, который содержит этап, на котором применяют настройки, которые делают ходовые качества транспортного средства более экономичными, с максимальной шириной диапазона между vmin и vmax и/или средним допустимым ускорением и/или замедлением.
21. Способ по п. 14, который содержит этап, на котором применяют настройки, которые делают ходовые качества транспортного средства более экономичными, без ущерба комфорту, со средней шириной диапазона между vmin и vmax и/или средним допустимым ускорением и/или замедлением.
22. Способ по п. 14, который содержит этап, на котором применяют настройки, которые делают ходовые качества транспортного средства более мощными, с минимальной шириной диапазона между vmin и vmax и/или максимальным допустимым ускорением и/или замедлением.
23. Способ по п. 14, который содержит этап, на котором применяют настройки, которые делают ходовые качества транспортного средства экономичными и комфортными, с равномерной шириной диапазона вокруг заданной скорости, выбранной водителем.
24. Способ по п. 14, который содержит этапы, на которых вычисляют пороговые значения для упомянутой, по меньшей мере, одной характеристики сегментов, в зависимости от одного или более значений, зависящих от транспортного средства, причем пороговые значения служат границами для разделения сегментов на различные категории, сравнивают, по меньшей мере, одну характеристику каждого сегмента с вычисленными пороговыми значениями и относят каждый сегмент к той или иной категории на основании результатов сравнений.
25. Способ по п. 24, который содержит этап, на котором определяют значения, зависящие от транспортного средства, для текущего передаточного числа, текущей массы транспортного средства, кривой максимального крутящего момента двигателя, механического трения и/или сопротивления движению транспортного средства при текущей скорости.
26. Способ по п. 14, который содержит этапы, на которых определяют горизонт непрерывно при условии, что он не отклоняется от намеченного курса для транспортного средства, и непрерывно осуществляют этапы для вычисления и обновления значений контрольной точки для системы управления на протяжении всей длины горизонта.
| US 20090037062 A1, 05.02.2009 | |||
| DE 102008038078 A1, 14.05.2009 | |||
| Устройство для дозированной подачии уплОТНЕНия пОРОшКА | 1979 |
|
SU838363A1 |

