Изобретение относится к улавливающему подшипнику для улавливания роторного вала машины.
Для опоры вращающегося роторного вала в машине в настоящее время все чаще используются магнитные подшипники для опоры во время работы роторного вала, которые с помощью магнитных полей удерживают вращающийся роторный вал во взвешенном состоянии. При отказе магнитного подшипника, например, вследствие отсутствия тока, ротор падает в улавливающий подшипник и улавливается им. Таким образом, улавливающий подшипник служит для улавливания роторного вала. Улавливающий подшипник осуществляет временно опору роторного вала до полной остановки роторного вала. Улавливающие подшипники должны, с одной стороны, выдерживать удар при падении вращающегося роторного вала в улавливающий подшипник и, с другой стороны, обеспечивать надежный выбег роторного вала в улавливающем подшипнике. Для этого улавливающий подшипник имеет по сравнению с диаметром роторного вала слегка больший внутренний диаметр, так что роторный вал при нормальной работе, т.е. при активном магнитном подшипнике, не соприкасается с улавливающим подшипником. Обычно улавливающий подшипник установлен в зоне соответствующего конца роторного вала в корпусе статора машины.
Улавливающие подшипники должны, с одной стороны, выдерживать удар при падении вращающегося роторного вала в улавливающий подшипник и, с другой стороны, обеспечивать надежный выбег роторного вала в улавливающем подшипнике. Для этого должны иметься определенные соотношения трения и кинематические условия. Слишком большие коэффициенты трения между трущимися и катящимися конструктивными элементами приводят в течение кратчайшего времени к сильному нагреванию и тем самым к короткому сроку службы улавливающего подшипника. Это приводит к тому, что выбег без торможения роторного вала в улавливающих подшипниках в большинстве случаев невозможен. Поэтому для надежной работы машин, в которых роторный вал опирается с помощью магнитных подшипников, необходимо обычно предусматривать тормозные устройства для торможения роторного вала.
При отказе магнитного подшипника роторный вал, как указывалось выше, падает в улавливающий подшипник. При этом существует опасность, что роторный вал попадает в так называемый «обратный вихрь» и катится вдоль внутренней поверхности улавливающего подшипника. В противоположность синхронному вращательному движению ротора, при котором отклонение ротора происходит синхронно с вращающимся возбуждением дисбаланса, при обратном вихре роторный вал проходит по орбите в противоположном направлении к вращению роторного вала с очень большой амплитудой. При этом накладывается синхронная вращательная составляющая с намного меньшей амплитудой, так что получается имеющая форму эллипса орбита.
Условия для образования обратного вихря разнообразны. Возникновение обратного вихря приводит обычно, из-за очень больших возникающих при этом сил, к неисправности или повреждению машины.
Из уровня техники известно использование подшипников качения в качестве улавливающих подшипников. При этом наружное кольцо подшипника качения соединено с подшипниковым щитом. При этом внутренний диаметр внутреннего кольца немного больше наружного диаметра роторного вала. Роторный вал падает при падении во внутреннее кольцо, за счет чего после очень короткого времени внутреннее кольцо и тело качения ускоряются и роторный вал выбегает. Улавливающий подшипник на основе подшипника с телами качения, с одной стороны, не пригоден для роторов большого веса, и, с другой стороны, имеется опасность возникновения обратного вихря.
Кроме того, известно также использование сухих подшипников скольжения в качестве улавливающих подшипников. При этом роторный вал падает непосредственно в неподвижное кольцо, которое состоит из имеющих покрытие вкладышей подшипника, и выбегает в нем. При этом при неблагоприятных соотношениях трения роторный вал может попадать в обратный вихрь.
До настоящего времени делались попытки посредством сложных доказательств с помощью расчетов и испытаний показать, что в указанных выше улавливающих подшипниках обратный вихрь с учетом всех известных краевых условий не возникает. Такой способ действия требует много времени и связан с большими расходами.
Из US 5752774 A известен вспомогательный подшипник для вала, который при нормальной работе поддерживается с помощью магнитной опоры. Он состоит из множества роликов, которые установлены в общем, неподвижном опорном теле и за счет подвижности в радиальном направлении относительно подлежащего поддержке вала могут находиться на расстоянии от него.
Из WO 03/038973 A1 известен защитный подшипник для электрической машины с высокой скоростью вращения.
Из DE 2711065 A1 известен улавливающий подшипник, который окружает ротор и может удерживать определенный воздушный зазор между ротором и улавливающим подшипником.
Из DE 102004024206 B4 известна магнитная опора для вала.
Задачей изобретения является создание улавливающего подшипника, в котором вероятность возникновения обратного вихря сильно снижена по сравнению с известными из уровня техники улавливающими подшипниками.
Эта задача решена с помощью улавливающего подшипника для улавливания роторного вала машины, при этом улавливающий подшипник имеет проходящие вокруг воображаемой геометрической средней оси первое опорное тело и роликовые тела, при этом каждое роликовое тело имеет зону, которая расположена между средней осью и первым опорным телом, при этом роликовые тела соединены через ось с возможностью вращения с первым опорным телом, при этом улавливающий подшипник имеет расположенное вокруг первого опорного тела второе опорное тело, при этом между первым опорным телом и вторым опорным телом расположены упругие элементы, при этом упругие элементы имеют, каждый, слой из резины и два слоя из металла, при этом слой из резины расположен между обоими слоями из металла.
За счет того, что роликовые тела соединены, каждое, через ось с возможностью вращения с первым опорным телом, достигается особенно низкий коэффициент трения.
За счет расположения упругих элементов между первым опорным телом и вторым опорным телом уменьшается ударная нагрузка, которая действует на роликовые тела и подшипники качения при падении роторного вала в улавливающий подшипник.
Предпочтительные варианты выполнения изобретения следуют из зависимых пунктов формулы изобретения.
Предпочтительно, когда роликовые тела выполнены в виде роликов. Ролики представляют обычное выполнение роликовых тел и особенно просты и экономичны в изготовлении.
Кроме того, предпочтительно, когда первое опорное тело выполнено в виде кольца, поскольку кольцо имеет особенно стабильную механически форму.
Кроме того, предпочтительно, когда роликовые тела равномерно распределены по окружности первого опорного тела, поскольку в этом случае можно особенно надежно предотвращать обратный вихрь.
Кроме того, предпочтительно, когда второе опорное тело выполнено в виде кольца, поскольку кольцо имеет особенно стабильную механически форму.
Кроме того, предпочтительно, когда упругие элементы расположены, относительно воображаемой геометрической средней оси, в радиальном направлении на одной линии с роликовыми телами.
Кроме того, предпочтительно, когда упругие элементы расположены со смещением в тангенциальном направлении по отношению к роликовым телам. За счет этого создается в целом особенно простая система.
Кроме того, предпочтительно выполнение машины, которая имеет улавливающий подшипник, согласно изобретению. При этом машина предпочтительно имеет магнитный подшипник для опоры во время работы роторного вала.
Кроме того, предпочтительно выполнение машины, которая имеет улавливающий подшипник, согласно изобретению. При этом машина предпочтительно имеет магнитный подшипник для опоры во время работы роторного вала. Машина может быть выполнена, например, в виде электродвигателя, или генератора, или компрессора, или нагнетателя, или турбины. Машина может быть выполнена, в частности, в виде ветрового генератора.
Ниже приводится более подробное пояснение двух примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1 - машина, которая имеет улавливающий подшипник согласно изобретению;
фиг.2 - улавливающий подшипник согласно первому варианту выполнения изобретения в изометрической проекции; и
фиг.3 - улавливающий подшипник согласно второму варианту выполнения изобретения в изометрической проекции.
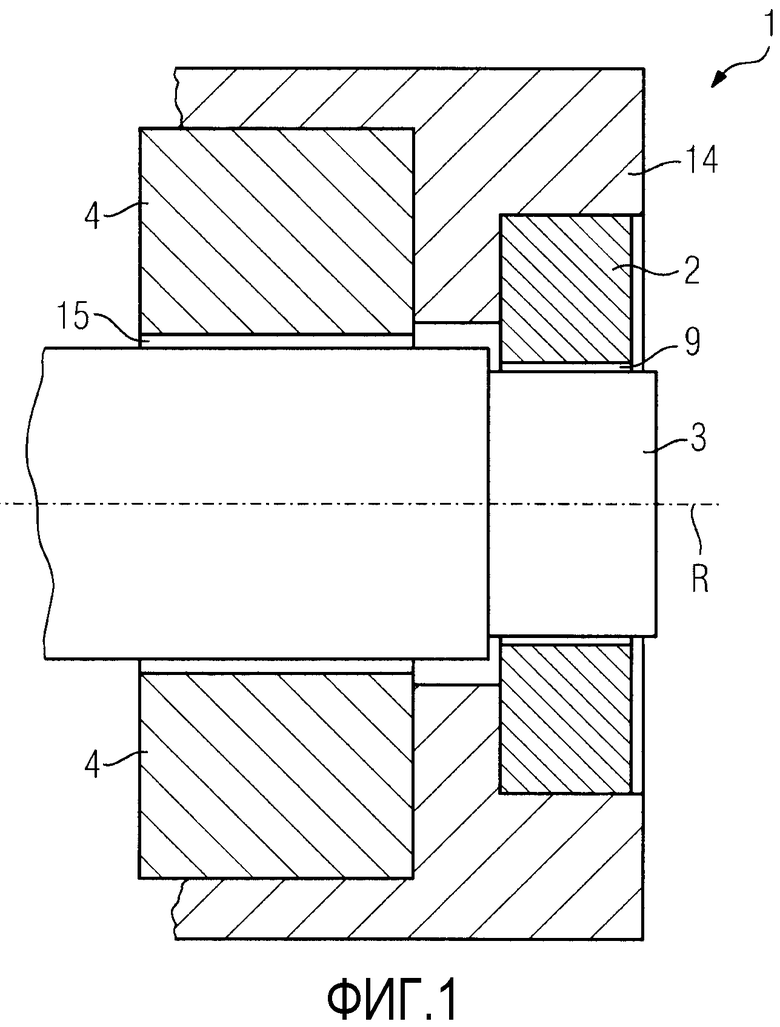
На фиг.1 показаны схематично существенные для понимания изобретения элементы машины 1, которая выполнена в рамках первого варианта выполнения в виде электродвигателя. Другие элементы машины, такие как, например, ярмо ротора, для ясности не изображены на фиг.1, поскольку они не существенны для понимания изобретения. Машина 1 имеет расположенный с возможностью вращения, опирающийся на магнитный подшипник 4 роторный вал 3, который при работе машины 1 вращается вокруг воображаемой геометрической средней оси R.
Магнитный подшипник 4 удерживает роторный вал 3 с помощью регулируемого магнитного поля во взвешенном состоянии в воздушном зазоре 15. Для этого магнитный подшипник 4 имеет в качестве существенных элементов катушки для создания магнитного поля.
Наряду с магнитным подшипником 4, машина 1 имеет улавливающий подшипник 2, который при отказе магнитного подшипника улавливает роторный вал 3, когда он падает в улавливающий подшипник 2, при этом улавливающий подшипник осуществляет опору роторного вала 3 до его остановки. Такой отказ магнитного подшипника 4 может возникать, например, при отсутствии электроснабжения машины 1 и тем самым магнитного подшипника 4. При этом следует отметить, что улавливающий подшипник 2 и магнитный подшипник 4 показаны схематично в разрезе на фиг.1 лишь символично в виде прямоугольников.
Кроме того, машина 1 имеет неподвижный корпус 14 машины, на котором закреплен улавливающий подшипник 2, при этом крепление между улавливающим подшипником 2 и корпусом 14 машины для ясности не изображено на фиг.1.
Между улавливающим подшипником 2 и роторным валом 3 расположен воздушный зазор 9. При включенном и правильно работающем магнитном подшипнике 4 улавливающий подшипник 2 не находится в соприкосновении с роторным валом 3. При отказе магнитного подшипника 4, например, вследствие отсутствия тока, роторный вал 3 падает в улавливающий подшипник, и происходит механический контакт между роликовыми телами улавливающего подшипника, согласно изобретению (см. фиг.2 и фиг.3), и при работе машины 1 вращающегося, в частности, быстро вращающегося роторного вала 3.
На фиг.2 показан в изометрической проекции улавливающий подшипник согласно первому варианту выполнения изобретения.
Улавливающий подшипник 2 согласно изобретению имеет проходящие вокруг воображаемой геометрической средней оси М первое опорное тело 7 и роликовые тела, при этом для ясности позицией 5 обозначено лишь одно роликовое тело. Средняя ось М проходит через геометрическую середину GM первого опорного тела 7. При этом первое опорное тело 7 выполнено в рамках примера выполнения в виде кольца. Однако первое опорное тело может иметь также другую геометрическую проходящую вокруг средней оси М форму, такую как, например, квадратная форма. Роликовые тела имеют зону 19, которая расположена между средней осью М и первым опорным телом 7. Отдельные роликовые тела в рамках первого примера выполнения неподвижно соединены с соответствующей, предпочтительно имеющей форму стержня осью (механической осью), при этом для ясности лишь одна ось обозначена позицией 6. Ось 6 соединена через подшипники 11 качения с возможностью вращения предпочтительно с внутренней стороной 8 первого опорного тела 7. Подшипники 11 качения предпочтительно расположены на обоих концах оси 6 и закреплены с помощью удерживающих устройств 12 на внутренней стороне 8 первого опорного тела 7. Для этого внутренняя сторона 8 первого опорного тела 7 снабжена в рамках первого примера выполнения выемками. Таким образом, отдельные роликовые тела соединены, каждое, через соответствующую ось с возможностью вращения с первым опорным телом 7. Следует при этом отметить, что, в качестве альтернативного решения отдельные роликовые тела могут быть также соединены с возможностью вращения через соответствующие имеющие форму стержня оси с первым опорным телом 7 так, что соответствующая ось неподвижно соединена с первым опорным телом 7, а соответствующее роликовое тело соединено с возможностью вращения, например, через подшипник качения, с осью. Роликовые тела равномерно распределены по периметру первого опорного тела. Таким образом, роликовые тела в рамках примера выполнения расположены с равномерным распределением вдоль периметра первого опорного тела.
При этом в рамках примера выполнения роликовые тела выполнены в виде роликов.
Когда роторный вал 3 падает в улавливающий подшипник 2, то он приходит в контакт с наружной поверхностью роликовых тел, так что роликовые тела тотчас начинают вращаться. С помощью изобретения предотвращается возникновение обратного вихря за счет минимизации поверхностей трения, по которым может катиться роторный вал 3 при выбеге роторного вала 3 в улавливающем подшипнике 2. Роликовые тела имеют лишь очень небольшую поверхность трения, с которой приходит в контакт роторный вал 3. Таким образом, возникает лишь очень небольшое трение между улавливающим подшипником и роторным валом. В рамках одного предпочтительного варианта выполнения изобретения трение дополнительно минимизируется за счет использования подшипников качения, на которые опираются оси. Роторный вал 3 катится по наружной поверхности роликовых тел. За счет достигаемого с помощью изобретения очень небольшого трения между улавливающим подшипником и роторным валом надежно предотвращается возникновение обратного вихря.
Кроме того, улавливающий подшипник согласно изобретению предпочтительно имеет расположенное вокруг первого опорного тела 7 второе опорное тело 10. При этом второе опорное тело 10 в рамках примера выполнения выполнено в виде кольца. Однако второе опорное тело может иметь также другую геометрическую форму, такую как, например, квадратная форма. Между первым опорным телом 7 и вторым опорным телом 10 в рамках примера выполнения расположены упругие элементы, при этом для наглядности лишь один упругий элемент обозначен позицией 13. Резиновые элементы имеют слой 17 из резины и два слоя 18 из металла, при этом слой 17 из резины расположен между обоими слоями 18 из металла.
За счет упругих элементов эффективно улавливается удар, который действует на роликовые тела при падении роторного вала, и тем самым защищаются роликовые тела и подшипники качения.
При этом в рамках показанного на фиг.2 примера выполнения упругие элементы расположены со смещением в тангенциальном направлении относительно роликовых тел, что обеспечивает простую для реализации конструкцию всей системы. При этом упругие элементы в рамках показанного на фиг.2 примера выполнения расположены относительно проходящей через геометрическую середину GM первого опорного тела 7 воображаемой геометрической средней оси М со смещением на угол 45° по отношению к роликовым телам.
На фиг.3 показан второй вариант выполнения изобретения. Этот вариант выполнения соответствует по конструкции по существу показанному на фиг.2 варианту выполнения. Поэтому одинаковые элементы на фиг.3 обозначены теми же позициями, что и на фиг.2. Существенное отличие от показанного на фиг.2 варианта выполнения состоит в том, что в варианте выполнения согласно фиг.3 упругие элементы расположены относительно воображаемой геометрической средней оси М первого опорного тела 7 в радиальном направлении на одной линии с роликовыми телами. Таким образом, отдельные роликовые тела расположены на одной линии с соответствующим упругим элементом. Этот вариант выполнения имеет то преимущество, что удар, который действует на роликовые тела при падении роторного вала, может улавливаться особенно эффективно, поскольку создаваемая при ударе сила направляется непосредственно в радиальном направлении в упругие элементы, и тем самым роликовые тела и подшипники качения особенно хорошо защищаются и их нагрузка особенно сильно уменьшается.
При этом в рамках примера выполнения согласно фиг.3 каждое роликовое тело снабжено двумя упругими элементами. Количество упругих элементов, применяемых для каждого роликового тела, а также их выполнение можно согласовывать с возникающими нагрузками роликовых тел и применяемых для опоры роликовых тел подшипников качения.
Как показано на фиг.2 и 3, упругие элементы закреплены с помощью винтов на втором опорном теле 10, при этом для ясности лишь два винта обозначены позицией 16. Следует отметить, что упругие элементы предпочтительно предварительно напряжены с целью повышения их демпфирующего действия.
При этом упругие тела не должны быть обязательно расположены с равномерным распределением по периметру первого опорного тела, как в показанном примере выполнения. Кроме того, упругие тела могут быть расположены по периметру опорного тела произвольно по отношению роликовых тел.
Кроме того, роликовые тела не обязательно должны быть также расположены с равномерным распределением по периметру опорного тела, как в показанном примере выполнения.
Следует дополнительно отметить, что для опоры роликового тела может быть предусмотрено, естественно, также больше двух подшипников качения для каждого роликового тела.
Следует также отметить, что улавливающий подшипник согласно изобретению должен иметь предпочтительно по меньшей мере три роликовых тела, при этом улавливающий подшипник может иметь, естественно, также больше четырех выбранных в примерах выполнения согласно фиг.2 и 3 роликовых тел.
Улавливающий подшипник предотвращает с высокой вероятностью возникновение обратного вихря. Он пригоден для высоких скоростей вращения, а также для роторных валов большого веса. Кроме того, он требует мало места.

Изобретение относится к улавливающему подшипнику для улавливания роторного вала машины. Улавливающий подшипник (2) имеет проходящие вокруг воображаемой геометрической средней оси (М) первое опорное тело (7) и роликовые тела (5). Роликовые тела (5) имеют, каждое, зону (19), которая расположена между средней осью (М) и первым опорным телом (7). Роликовые тела (5) соответственно соединены через ось (6) и расположенные на обоих концах оси (6) подшипники (11) качения с возможностью вращения с первым опорным телом (7). Подшипник (2) имеет расположенное вокруг первого опорного тела (7) второе опорное тело (10). Между опорным телом (7) и опорным телом (10) расположены упругие элементы (13). Каждый упругий элемент (13) имеет слой (17) из резины и два слоя (18) из металла. Слой (17) из резины расположен между обоими слоями (18) из металла. Технический результат - создание улавливающего подшипника, в котором предотвращена вероятность возникновения обратного вихря за счет минимизации поверхностей трения и который при этом пригоден для высоких скоростей вращения, а также для роторных валов большого веса и требует мало места. 2 н.п. и 23 з.п. ф-лы, 3 ил.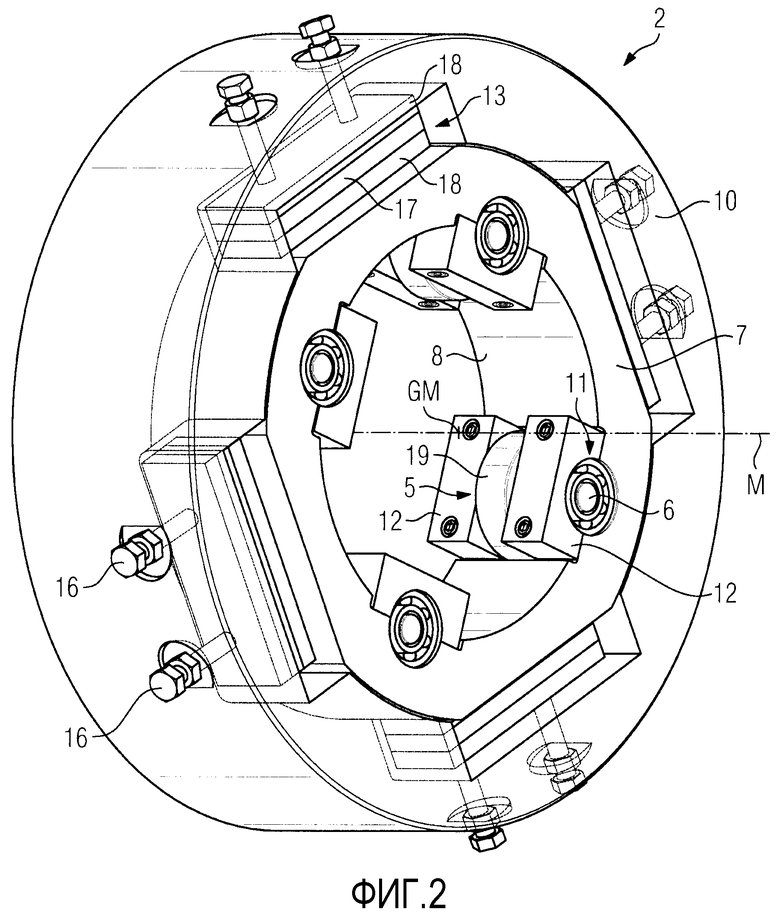
1. Улавливающий подшипник для улавливания роторного вала (3) машины (1), при этом улавливающий подшипник (2) имеет проходящие вокруг воображаемой геометрической средней оси (М) первое опорное тело (7) и роликовые тела (5), при этом каждое роликовое тело имеет зону (19), которая расположена между средней осью (М) и первым опорным телом (7), при этом роликовые тела (5) соответственно соединены через ось (6) и расположенные на обоих концах оси (6) подшипники (11) качения с возможностью вращения с первым опорным телом (7), при этом улавливающий подшипник (2) имеет расположенное вокруг первого опорного тела (7) второе опорное тело (10), при этом между первым опорным телом (7) и вторым опорным телом (10) расположены упругие элементы (13), при этом каждый упругий элемент (13) имеет слой (17) из резины и два слоя (18) из металла, при этом слой (17) из резины расположен между обоими слоями (18) из металла.
2. Улавливающий подшипник по п.1, отличающийся тем, что первое опорное тело (7) выполнено в виде кольца.
3. Улавливающий подшипник по п.1 или 2, отличающийся тем, что роликовые тела (5) выполнены в виде роликов.
4. Улавливающий подшипник по п.1, отличающийся тем, что роликовые тела (5) расположены с равномерным распределением по окружности первого опорного тела (7).
5. Улавливающий подшипник по п.2, отличающийся тем, что роликовые тела (5) расположены с равномерным распределением по окружности первого опорного тела (7).
6. Улавливающий подшипник по п.3, отличающийся тем, что роликовые тела (5) расположены с равномерным распределением по окружности первого опорного тела (7).
7. Улавливающий подшипник по п.1, отличающийся тем, что второе опорное тело (10) выполнено в виде кольца.
8. Улавливающий подшипник по п.4, отличающийся тем, что второе опорное тело (10) выполнено в виде кольца.
9. Улавливающий подшипник по п.5, отличающийся тем, что второе опорное тело (10) выполнено в виде кольца.
10. Улавливающий подшипник по п.6, отличающийся тем, что второе опорное тело (10) выполнено в виде кольца.
11. Улавливающий подшипник по п.1, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
12. Улавливающий подшипник по п.4, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
13. Улавливающий подшипник по п.7, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
14. Улавливающий подшипник по п.8, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
15. Улавливающий подшипник по п.9, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
16. Улавливающий подшипник по п.10, отличающийся тем, что упругие элементы (13) расположены, относительно воображаемой геометрической средней оси (М), в радиальном направлении на одной линии с роликовыми телами (5).
17. Улавливающий подшипник по п.1, отличающийся тем, что упругие элементы (13) расположены со смещением в тангенциальном направлении по отношению к роликовым телам (5).
18. Улавливающий подшипник по п.7, отличающийся тем, что упругие элементы (13) расположены со смещением в тангенциальном направлении по отношению к роликовым телам (5).
19. Улавливающий подшипник по п.8, отличающийся тем, что упругие элементы (13) расположены со смещением в тангенциальном направлении по отношению к роликовым телам (5).
20. Улавливающий подшипник по п.9, отличающийся тем, что упругие элементы (13) расположены со смещением в тангенциальном направлении по отношению к роликовым телам (5).
21. Улавливающий подшипник по п.10, отличающийся тем, что упругие элементы (13) расположены со смещением в тангенциальном направлении по отношению к роликовым телам (5).
22. Машина, при этом машина (1) имеет улавливающий подшипник (2) по любому из пп.1-21.
23. Машина по п.22, отличающаяся тем, что машина (1) имеет магнитный подшипник (4) для опоры во время работы роторного вала (3).
24. Машина по п.22 или 23, отличающаяся тем, что машина (1) выполнена в виде электродвигателя, или генератора, или компрессора, или нагнетателя, или турбины.
25. Машина по п.24, отличающаяся тем, что генератор выполнен в виде ветрового генератора.
| US 5752774 A, 19.05.1998 | |||
| US 5021697 A, 04.06.1991 | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| DE 102006017933 A1, 31.10.2007 | |||
| Плавучее устройство для сбора нефти с водной поверхности | 1946 |
|
SU69911A1 |
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |

