Область техники
Изобретение относится к кинематическим схемам и конструкции сферических кривошипно-ползунных механизмов для преобразования вращательного движения в качательное (то есть возвратно-вращательное) движение и обратно.
Такие механизмы могут быть использованы преимущественно в обратимых машинах объемного вытеснения на основе по меньшей мере одного поворотного гидро- или пневмоцилиндра для преобразования (в зависимости от порядка приложения входной нагрузки):
либо вращения входного вала машины в качательное движение кинематически связанных с этим валом лопастей,
либо качательного движения лопастей во вращение выходного вала машины.
Как будет показано далее на практическом примере, такие механизмы включают в состав обратимых машин между лопастями и валом, который в зависимости от порядка подключения источника энергии может быть ведущим (входным) или ведомым (выходным).
Специалистам понятно, что предложенные механизмы могут быть использованы в составе трансмиссий иных устройств.
Уровень техники
Обратимые машины объемного вытеснения (далее - обратимые машины) широко используют в технике. Их общеизвестными частями практически во всех случаях служат:
по меньшей мере один полый проточный корпус, ограниченный внутри поверхностью подходящего тела вращения и подключаемый через необходимые отверстия и пневмо- или гидрораспределитель либо к питающей магистрали для подачи текучей среды на сжатие и к напорной магистрали для вывода сжатой текучей среды, либо к источнику рабочего тела с избыточным давлением и к приемнику (“регенератору”) отработавшего рабочего тела,
по меньшей мере один рабочий орган (обычно лопасть), установленный в корпусе с возможностью качательного движения, и
обратимый преобразователь направления движения, способный воспринимать либо вращение входного вала, преобразуя его в качательное движение лопасти, либо качательное движение лопасти, преобразуя его во вращательное движение выходного вала.
Для справки отметим, что употребляемые здесь и далее термины означают:
текучая среда - жидкость или газ, которые, поступая в обратимую машину под относительно низким входным давлением, могут быть сжаты и поданы в напорную магистраль под более высоким выходным давлением;
рабочее тело - жидкость или газ, которые, находясь под избыточным (в сравнении с атмосферным) давлением, могут служить непосредственным источником энергии для работы обратимой машины как двигателя;
лопасть - рабочий орган многих машин объемного вытеснения, способный совершать качательное движение либо от внешнего привода (для всасывания и нагнетания текучей среды), либо под действием попеременно подаваемых с разных сторон лопасти порций рабочего тела (для вращения выходного вала);
поворотный цилиндр - простейшая обратимая машина объемного вытеснения, в которой качающийся рабочий орган имеет вид посаженной на (входной ведущий или выходной ведомый) вал одностворчатой или симметричной двустворчатой лопасти.
Многие обратимые машины, особенно пневмоцилиндры и гидроцилиндры, изготовляют крупными сериями, а иногда и массово. Поэтому весьма желательно, чтобы преобразователи направления движения для таких машин имели как можно более высокую надежность и ремонтопригодность, как можно меньшие потери на трение и как можно легче поддавались унификации, то есть могли быть встроены в трансмиссии разнообразных обратимых машин.
Эти требования трудно совместимы. Поэтому до сих пор удавалось выполнить только некоторые из них.
Так, обратимыми преобразователями направления движения для поршневых гидро- или пневмоцилиндров обычно служат кривошипно-шатунные механизмы (см. Чупраков Ю.И. Основы гидро- и пневмоприводов. - Москва: “Машиностроение”, 1966, с.29, рис.5.2).
Практика показала, что эти механизмы надежны и ремонтопригодны, поскольку практически целиком расположены вне рабочего объема указанных обратимых машин, и характеризуются приемлемыми потерями на трение.
Однако они громоздки и практически неприменимы в составе таких обратимых машин, которые за один оборот рабочего вала могут вытеснять в нагнетательные магистрали объем текучей среды, соответствующий нескольким максимальным объемам рабочей полости.
В частности, эти преобразователи несовместимы с обратимыми машинами на основе поворотных (“моментных”) гидро- или пневмоцилиндров с одно- или двустворчатыми лопастями, корпуса которых в поперечном сечении имеют вид либо секторов (необязательно круговых) цилиндров, либо предпочтительно круговых цилиндров с торцевыми стенками, а рабочие валы введены в полости корпусов по меньшей мере сквозь одну торцевую стенку (ор cit, с.28, соответственно рисунки 3.2 и 4.2).
Эти машины привлекательны тем, что могут за один оборот ведущего вала подать в напорную магистраль объем жидкости или газа, который в два или четыре раза превышает рабочий объем корпуса, ибо при качании одно- или двустворчатых лопастей рабочие камеры соответственно дважды или четырежды наполняются и опорожняются.
Для таких обратимых машин известны параллелограммные шарнирно-рычажные механизмы-преобразователи направления движения (Артоболевский И.И. МЕХАНИЗМЫ В СОВРЕМЕННОЙ ТЕХНИКЕ / Справочное пособие для инженеров, конструкторов и изобретателей в 7-и томах, сводный т.VI-VII, М.: “Наука”, 1981, с.403, рефераты 3894 и 3895). В этих механизмах лопасти служат кривошипами.
Однако шипы, которые жестко связаны с лопастями, должны быть введены в такие фигурные пазы в торцевых стенках корпусов, которые невозможно надежно уплотнить. Поэтому, несмотря на очевидную теоретическую эффективность обратимых машин на основе моментных цилиндров, их доныне практически не изготовляли и не применяли.
Видимо, поэтому же предпочтение было отдано роторным машинам объемного вытеснения, в которых механизмы-преобразователи направления движения встроены внутрь преимущественно сферических корпусов (US 826985, 1906 г.; SE 339010, 1970 г.; WO 82/03106, WO 88/03986 и WO 90/07632 и мн. др.). В таких машинах лопасти непосредственно служат кинематическими звеньями механизмов-преобразователей направления движения.
Однако введение преобразователей направления движения внутрь корпусов обратимых машин затрудняет их изготовление, сборку и ремонт, уменьшает полезный объем, исключает возможность надежного уплотнения переменных рабочих объемов, отсекаемых качающимися лопастями, и, соответственно, отрицательно сказывается на к.п.д.
Тем не менее, разработки такого рода не прошли даром и в соответствии с теоретическими принципами, известными из указанной книги И.И.Артоболевского (т.II "Кулисно-рычажные и кривошипно-ползунные механизмы", М.: “Наука”, 1979, с.499, рис.15-19) в WO 96/31684 (см. фигуры 1-6 и текст от строки 21 на с.8 до строки 07 на с.11) был предложен работоспособный сферический кривошипно-ползунный механизм. Он наиболее близок к предлагаемому далее механизму по технической сущности и имеет:
корпус (роль которого в известном случае выполняет корпус любой отдельной секции обратимой машины объемного вытеснения),
вал, который установлен в корпусе в двух противоположных соосных подшипниках,
кривошип, который жестко связан с валом, выполнен в виде выступа (в известном случае именуемого “водило” и имеющего сферическую форму) и снабжен кольцевым пазом, плоскость симметрии которого наклонена к геометрической оси вала и проходит через упомянутую выше центральную точку,
ползун, который в известном случае выполнен в виде составного кольцевого вкладыша, установлен по скользящей посадке в указанном пазу заподлицо с его поверхностью и имеет на периферии первую радиально ориентированную выемку,
качательное кинематическое звено, которое установлено в корпусе в двух противоположных соосных подшипниках так, что их общая геометрическая ось практически перпендикулярна общей геометрической оси подшипников вала (и которое в известном случае имеет вид плоской кольцевой лопасти со сфероидальным пазом на внутренней стенке кольца для скользящей посадки на сферическое водило и снабжено второй радиальной выемкой), и
средство кинематической связи между ползуном и качательным кинематическим звеном, которое в известном случае выполнено в виде по меньшей мере одного стержневого промежуточного элемента зацепления (штифта), установленного в указанных радиальных выемках вкладыша-ползуна и лопасти.
В таком механизме геометрические оси всех установленных с возможностью вращения деталей пересекаются в одной “центральной” точке.
К сожалению, он может эффективно работать лишь в таких насосах или гидродвигателях согласно той же WO 96/31684, в которых кинематические звенья преобразователя направления движения постоянно погружены в жидкую текучую среду или жидкое рабочее тело как в смазку, снижающую потери энергии на трение и износ.
Однако даже в таких машинах не удается надежно уплотнить ни зону контакта водила и лопасти, ни зазор между ее периферийной частью и стенкой корпуса. Поэтому неизбежно перетекание жидкости из “надлопастной” полости в “подлопастную” полость при каждом качании и быстрое снижение удельной мощности и к.п.д. машины по мере износа уплотнений. Кроме того, описанный механизм практически невозможно встроить в обратимые машины объемного вытеснения на основе поворотных пневмо- или гидроцилиндров.
Сущность изобретения
В основу изобретения положена задача усовершенствованием кинематической схемы создать такой сферический кривошипно-ползунный механизм, который надежно и с высоким к.п.д. преобразовывал бы вращательное движение в качательное или обратно в обратимых машинах объемного вытеснения на основе поворотных пневмо- или гидроцилиндров.
Поставленная задача решена тем, что в сферическом кривошипно-ползунном механизме для обратимых преобразователей направления движения, в котором геометрические оси всех установленных с возможностью вращения деталей пересекаются в одной “центральной” точке и который имеет:
корпус,
вал, который установлен в корпусе в двух противоположных соосных подшипниках,
кривошип, который жестко связан с валом в его средней части и снабжен кольцевым пазом, плоскость симметрии которого наклонена к геометрической оси вала и включает в себя упомянутую “центральную” точку,
ползун, который кинематически связан с кольцевым пазом кривошипа,
качательное кинематическое звено, которое установлено в корпусе в двух противоположных соосных подшипниках так, что их общая геометрическая ось практически перпендикулярна общей геометрической оси подшипников вала, и
по меньшей мере один стержневой промежуточный элемент кинематической связи между ползуном и качательным кинематическим звеном, согласно изобретению
в первом варианте
кольцевой паз кривошипа выполнен в виде по меньшей мере одной первой беговой дорожки для тел качения,
ползун выполнен на основе кольца с по меньшей мере одной второй беговой дорожкой для тел качения и кинематически связан с кольцевым пазом кривошипа через эти тела, а
качательное кинематическое звено выполнено в виде обоймы, которая с непрерывным зазором свободно охватывает ползун и жестко связана по меньшей мере с одним дополнительным выступающим за корпус валом; а во втором варианте кривошип выполнен разъемным,
в кольцевом пазу кривошипа жестко закреплено цельное кольцо с по меньшей мере одной беговой дорожкой, которое служит внутренним кольцом подшипника качения,
ползун выполнен на основе наружного кольца указанного подшипника качения, которое имеет одинаковое с указанным внутренним кольцом количество беговых дорожек и опирается на него через подходящие тела качения, а
качательное кинематическое звено выполнено в виде обоймы, которая с непрерывным зазором свободно охватывает ползун и жестко связана по меньшей мере с одним дополнительным выступающим за корпус валом.
В обоих вариантах кривошип кинематически связан с качательным кинематическим звеном подшипником качения, наружное кольцо которого служит ползуном. Поэтому обратимый преобразователь направления движения на основе любого такого механизма существенно более надежен и имеет более высокий к.п.д. в сравнении с уровнем техники.
Далее, поскольку преобразование направление движения может происходить вне корпусов обратимых машин объемного вытеснения, предложенный механизм в любом из указанных вариантов легко совместим с поворотными пневмо- или гидроцилиндрами.
И, наконец, поскольку надежное уплотнение валов и лопастей таких цилиндров ныне не представляет существенных затруднений, а их рабочие объемы могут быть использованы целиком, постольку с применением механизмов согласно изобретению можно изготовлять высокопроизводительные и надежные обратимые машины объемного вытеснения.
Каждый из указанных вариантов может иметь одинаковые дополнительные отличия.
Первое из них состоит в том, что указанная обойма жестко связана с двумя дополнительными соосными валами, которые выступают за пределы корпуса с его противоположных сторон. Это позволяет оппозитно подключать к обойме два поворотных пневмо- или гидроцилиндра с синфазно расположенными лопастями.
Следующее дополнительное отличие состоит в том, что вал, несущий кривошип, снабжен вне корпуса по меньшей мере одним маховиком. Это стабилизирует вращение вала независимо от того, служит ли он ведущим кинематическим звеном для привода лопастей поворотных пневмо- или гидроцилиндров, работающих соответственно как компрессоры или насосы, или использован как вал отбора мощности от таких машин, работающих соответственно как пневмо- или гидродвигатели.
Последнее дополнительное отличие состоит в том, что корпус выполнен в виде двух жестко связанных рамок, плоскости симметрии которых перпендикулярны и включают упомянутую “центральную” точку. Это существенно снижает материалоемкость преобразователей направления движения на основе предложенного механизма, упрощает их изготовление, техническое обслуживание и ремонт.
Естественно,
что при выборе конкретных форм практического осуществления изобретения возможны произвольные комбинации указанных дополнительных отличий с основным изобретательским замыслом в любом из двух указанных вариантов,
что этот замысел в пределах, очерченных формулой изобретения, может быть дополнен и/или уточнен с использованием обычных знаний специалистов и
что описанные далее предпочтительные примеры воплощения изобретательского замысла никоим образом не ограничивают объем прав на основе изобретения.
Краткое описание чертежей
Далее сущность изобретения поясняется подробным описанием конструкции сферического кривошипно-ползунного механизма и описанием его работы со ссылками на чертежи, где изображены на:
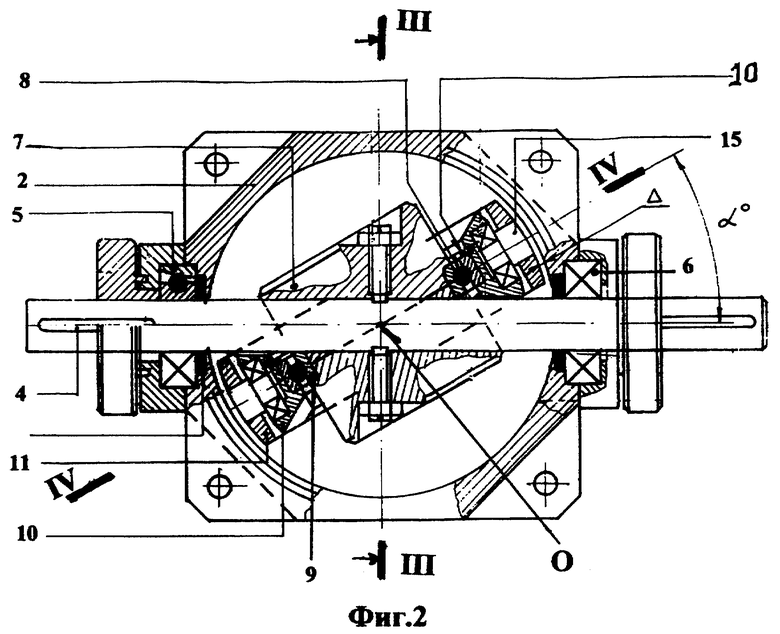
фиг.1 - пространственная кинематическая схема сферического кривошипно-ползунного механизма (на фоне пары поворотных пневмо- или гидроцилиндров, которые подключены к промежуточному качательному кинематическому звену);
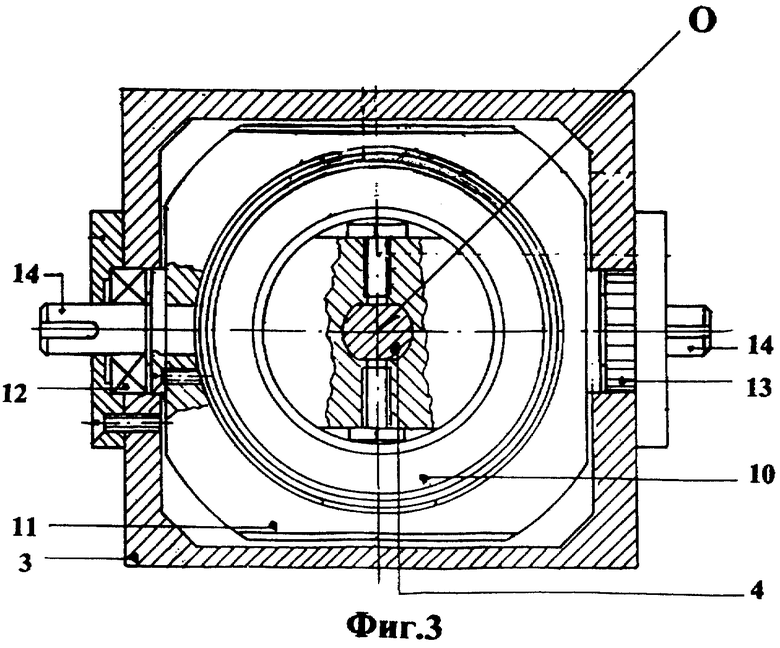
фиг.2 - продольный разрез указанного механизма по (входному или выходному) валу, несущему кривошип;
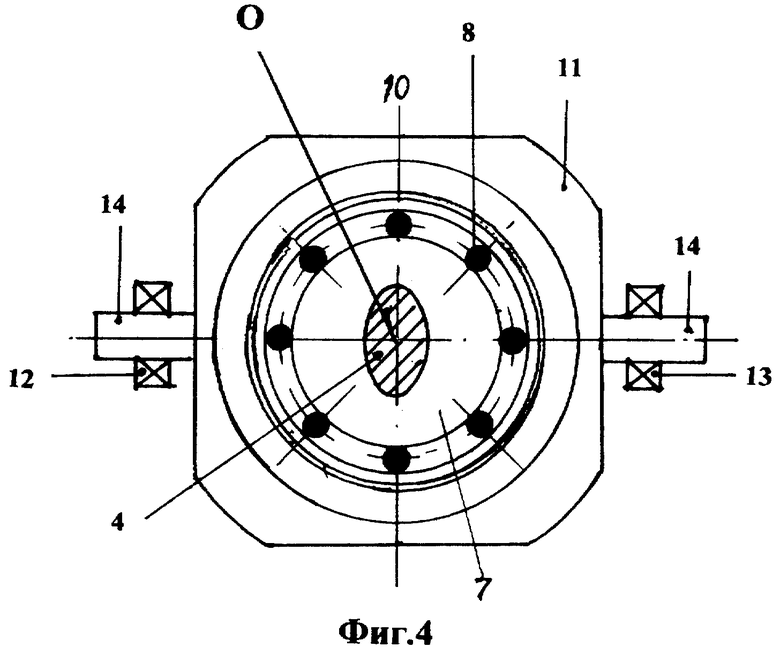
фиг.3 - поперечный разрез III-III указанного механизма с фиг.2;
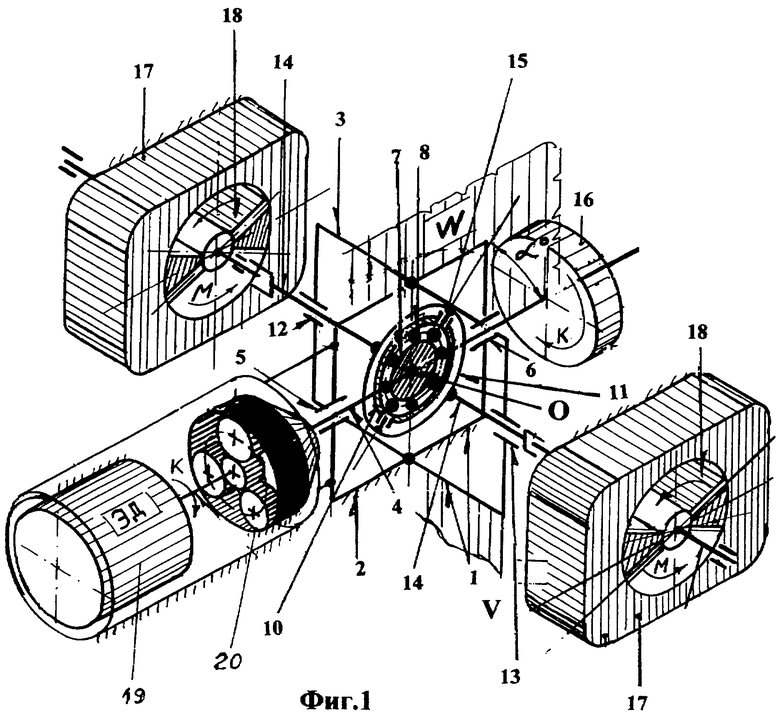
фиг.4 - упрощенное сечение IV-IV с фиг.2 качающихся кинематических звеньев в плоскости симметрии кольцевого паза кривошипа.
Наилучшие примеры осуществления изобретения
Предложенный сферический кривошипно-ползунный механизм, в котором геометрические оси всех установленных с возможностью вращения деталей пересекаются в одной центральной точке “0”, включает (см. фиг.1):
а) корпус 1 предпочтительно в виде двух жестко связанных рамок 2 и 3, плоскости симметрии “W” и “V” которых перпендикулярны и включают точку “0” (для ясности эти плоскости показаны наборами штрихов за пределами соответствующих рамок);
б) вал 4, который установлен в рамке 2 корпуса 1 в двух противоположных соосных подшипниках 5 и 6 и может служить входным (ведущим) или выходным (ведомым) валом для по меньшей мере одной обратимой машины объемного вытеснения предпочтительно на основе по меньшей мере одного поворотного пневмо- или гидроцилиндра;
в) предпочтительно разъемный кривошип 7, который жестко связан с валом 4 в его средней части и имеет по меньшей мере один не обозначенный особо кольцевой паз, симметричный относительно плоскости, которая наклонена к геометрической оси вала 4 и включает упомянутую выше точку “0”, при этом указанный паз:
либо непосредственно служит по меньшей мере одной беговой дорожкой для подходящих тел 8 качения (шариков или роликов, которые обычно зафиксированы в не показанном и не обозначенном особо сепараторе),
либо (см. фиг.2) служит для жесткого закрепления цельного внутреннего кольца 9 подходящего стандартного подшипника качения с по меньшей мере одной беговой дорожкой для упомянутых тел 8 качения;
г) ползун 10 (обычно на основе наружного кольца подшипника качения), который имеет одинаковое с упомянутым пазом кривошипа 7 или указанным внутренним кольцом 9 количество беговых дорожек и опирается на них через тела 8 качения;
д) качательное кинематическое звено в виде обоймы 11, которая
установлена в рамке 3 корпуса 1 в двух противоположных соосных подшипниках 12 и 13 так, что их общая геометрическая ось практически перпендикулярна общей геометрической оси подшипников 5 и 6 вала 4,
с непрерывным зазором свободно охватывает ползун 10 и
жестко связана с по меньшей мере одним дополнительным валом 14, а предпочтительно двумя валами 14, которые установлены в указанных подшипниках 12 и 13, выступают за пределы рамки 3 корпуса 1 и предназначены для подключения источника или потребителя качательного движения;
е) по меньшей мере один стержневой промежуточный элемент в виде оси 15 (а предпочтительно две таких оппозитно расположенных оси) для кинематической связи между ползуном 10 и качательным кинематическим звеном (обоймой) 11.
Понятно, что независимо от количества пар концентричных беговых дорожек на кривошипе 7 (или на внутреннем кольце 9) и на ползуне 10 тела качения 8 должны быть расположены зеркально симметрично относительно наклонной плоскости симметрии выше упомянутого кольцевого паза. Так, при использовании одной беговой дорожки на кривошипе 7 или кольце 9 и также одной беговой дорожки на ползуне 10 эта наклонная плоскость будет непосредственно служить общей плоскостью симметрии для обеих концентричных беговых дорожек и тел качения 8,
при использовании двух беговых дорожек на кривошипе 7 или кольце 9 и также двух беговых дорожек на ползуне 10 “левые” и “правые” пары концентричных дорожек и наборы тел качения 8 в них будут расположены практически эквидистантно относительно указанной наклонной плоскости с ее разных сторон, и
при использовании трех беговых дорожек на кривошипе 7 или кольце 9 и также трех беговых дорожек на ползуне 10 для пары средних концентричных дорожек и соответствующих тел качения 8 должно быть выполнено первое, а для двух пар боковых концентричных дорожек и установленных в них тел качения 8 - второе из выше указанных условий.
Желательно, чтобы вал 4 для стабилизации работы кинематической цепи был оснащен по меньшей мере одним маховиком 16, расположенным вне корпуса 1.
Желательно также, чтобы указанная обойма 11 была жестко связана с двумя соосными дополнительными валами 14, которые выступают за пределы рамки 3 корпуса 1 с его противоположных сторон. Это позволит включать описанный механизм между двумя поворотными пневмо- или гидроцилиндрами 17 с рабочими органами в виде преимущественно двустворчатых лопастей 18.
Для пояснения описания работы предложенного механизма на фиг.1 наряду с пневмо- или гидроцилиндрами 17 дополнительно показаны произвольный (в частности, электрический) двигатель 19 и (в частности, планетарный) редуктор 20.
На фигурах 2, 3 и 4 показан довольно простой пример реальной конструкции сферического кривошипно-ползунного механизма.
Так, на фиг.2 показаны разъемный кривошип 7, зажатое между половинами кривошипа внутреннее кольцо 9 стандартного однорядного радиального шарикоподшипника и ползун 10 на основе соответствующего наружного кольца этого шарикоподшипника, хотя специалисту понятно, что в зависимости от величины сил, действующих на указанные детали 9, 8 и 10 могут быть выбраны иные, например, двухрядные (и даже трехрядные) радиально-упорные шарико- или роликоподшипники.
Указанный на фиг.2 угол “а” между плоскостью симметрии кольцевого паза кривошипа 7 и геометрической осью вала 4 с вершиной в центральной точке “0” теоретически может быть выбран между 0° и 90°. Реально же величину “а” выбирают с учетом геометрической формы и размеров кривошипа 7 и ползуна 10 между 30° и 80°. Кстати, как показано на фиг.2, именно для минимизации угла “α” ползун 10 имеет конические боковые поверхности.
Действительно, обеспечить угол “α” менее 30° удается лишь путем конструктивных ухищрений, а задавать величину “α” более 80° практически нецелесообразно, поскольку это резко сокращает амплитуду качаний.
На фиг.3 ясно видны положение дополнительных валов 14 в рамке 3 корпуса 1 и кинематическая связь этих валов 14 с качательным звеном (обоймой) 11. Соответственно, на схематизированной фиг.4 особо четко видны жесткая связь валов 14 с обоймой 11 и равномерное расположение тел качения 8 в беговых дорожках на кривошипе 7 и на ползуне 10.
Работает этот механизм (см. вновь фиг.1) следующим образом.
Если входным кинематическим звеном служит вал 4, то двигатель 19 через редуктор 20 вращает этот вал вместе с кривошипом 7 относительно корпуса 1 в подшипниках 5 и 6.
Поскольку корпус 1 неподвижен, то при вращении кривошипа 7 плоскость симметрии упомянутого кольцевого паза и, соответственно, по меньшей мере одна беговая дорожка в этом пазу или во внутреннем кольце 9 циклично изменяют свое пространственное положение относительно геометрической оси вала 4.
В связи с этим цикличным изменением тела 8 качения перекатываются в беговой дорожке (или дорожках) кривошипа 7 на определенный угол вперед и назад и вынуждают ползун 10 совершать возвратно-вращательное движение. Ползун 10 через оси 15 толкает обойму 11, вынуждая ее совершать качательное движение вокруг этих осей 15.
Качаясь, обойма 11 приводит в возвратно-вращательное движение вал(ы) 14, установленный(е) в указанных подшипниках 12 и 13, и жестко связанные с валами 14 двустворчатые лопасти 18 поворотных пневмо- или гидроцилиндров 17, которые могут соответственно служить компрессорами или насосами для нагнетания потребителям подходящих текучих сред.
Если же вал 4 служит выходным кинематическим звеном, а на входе расположен работающий, как двигатель, по меньшей один пневмо- или гидроцилиндр 17 с по меньшей мере одностворчатой лопастью 18, то процесс протекает в обратном порядке.
Промышленная применимость
Изобретение может быть осуществлено с использованием известных в промышленности материалов, оборудования и инструментов.
В качестве наиболее предпочтительной области практического применения предложенных механизмов особо следует отметить:
насосы или компрессоры и гидро- или пневмодвигатели на основе предпочтительно пары оппозитно расположенных относительно корпуса 1 гидро- или пневмоцилиндров 17 с преимущественно двустворчатыми лопастями 18 и предпочтительно холодильные машины Стирлинга на основе по меньшей мере двух поворотных пневмоцилиндров 17, которые известным для специалистов образом дооснащены нагревателями, регенераторами и холодильниками рабочего тела.
При этом холодильные машины Стирлинга могут работать на таком общедоступном хладагенте, как воздух. Их можно применять в составе преимущественно промышленных морозильников для длительного (до года и более) хранения скоропортящихся продуктов питания или автомобильных, железнодорожных и корабельных рефрижераторов для перевозки таких продуктов на расстояния 1000-10000 км и более.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБРАТИМЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРАВЛЕНИЯ ДВИЖЕНИЯ И МАШИНА ОБЪЕМНОГО ВЫТЕСНЕНИЯ НА ЕГО ОСНОВЕ | 1996 |
|
RU2133833C1 |
| ЭЛЕМЕНТ КАЧЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2425263C1 |
| ЛОПАСТНОЙ ДВИГАТЕЛЬ | 2018 |
|
RU2697779C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| ЭКСЦЕНТРИКОВЫЙ ПОДШИПНИК КАЧЕНИЯ | 2007 |
|
RU2345256C1 |
| МНОГОЦИЛИНДРОВЫЙ ОСЕВОЙ БЕСКРИВОШИПНЫЙ ПОРШНЕВОЙ ТЕПЛОВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2690310C1 |
| Синусная многорядная передача | 1990 |
|
SU1737188A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |
| Золотниковая гильза распределения | 2018 |
|
RU2700117C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2198330C2 |
Изобретение относится к кинематическим схемам и конструкциям сферических кривошипно-ползунных механизмов для преобразования вращательного движения в качательное и обратно. В сферическом кривошипно-ползунном механизме геометрические оси вращающихся деталей пересекаются в “центральной” точке. Механизм включает корпус, вал с кривошипом в средней части, имеющим кольцевой паз с наклонной к геометрической оси вала плоскостью симметрии, ползун, кинематически связанный с пазом, и качательное кинематическое звено, которое сцеплено с ползуном по меньшей мере одним стержневым элементом. При этом вал и качательное звено установлены в корпусе в парах противоположных подшипников так, что геометрическая ось одной пары перпендикулярна геометрической оси второй пары. Кривошип кинематически связан с качательным кинематическим звеном посредством подшипника качения, наружное кольцо которого служит ползуном для повышения надежности и к.п.д. 2 н. и 6 з.п.ф-лы, 4 ил.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СФЕРОИДАЛЬНАЯ МАШИНА | 1990 |
|
RU2010983C1 |
| ОБЪЕМНАЯ МАШИНА (ВАРИАНТЫ) | 1996 |
|
RU2134796C1 |
| Установка преобразования мощности | 1988 |
|
SU1838634A3 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| US 4441869 A, 10.04.1984. | |||

