Изобретение относится к преобразованию цветового пространства. За исходное цветовое пространство может использоваться известные цветовые системы, как CIE 1931 г. (x, y); CIE 1960 г. (u, ν); CIELAB и другие цветовые системы.
Недостаток перечисленных цветовых систем, а также других, можно выразить в том, что пороги цветоразличения стандартного наблюдателя CIE отображаются на цветовых диаграммах не равными окружностями, а эллипсами (эллипсы Мак Адама), причем размер эллипса зависит от цветности стимула. Поверхность цветового пространства любой системы можно характеризовать эллиптичностью поверхности [1], определяемой как:

где Lmax - максимальная ось эллипса,
Lmin - минимальная ось эллипса.
В таблице 1 приведены значения эллиптичности поверхности цветового пространства некоторых систем. В этой же таблице приведены значения порога цветоразличения для стандартного наблюдателя CIE и максимальное отношение площадей эллипсов Мак Адама.
Из таблицы 1 видно, что ни одна цветовая поверхность не имеет значения ε=1, которое было бы идеально для поверхности цветового пространства.
Наиболее близким к предлагаемому способу является способ [3], в котором используется метрический тензор с переходом в новый базис, в котором исходные эллипсы [4] трансформируются в равновеликие окружности.
Недостатком известного способа является то, что производится преобразование эллипсов Мак Адама [4], характеризующих цветность стимула, и не учитывается яркость стимула, т.е. цветовое пространство двухмерное, а не трехмерное цветовое пространство, как это имеет место.
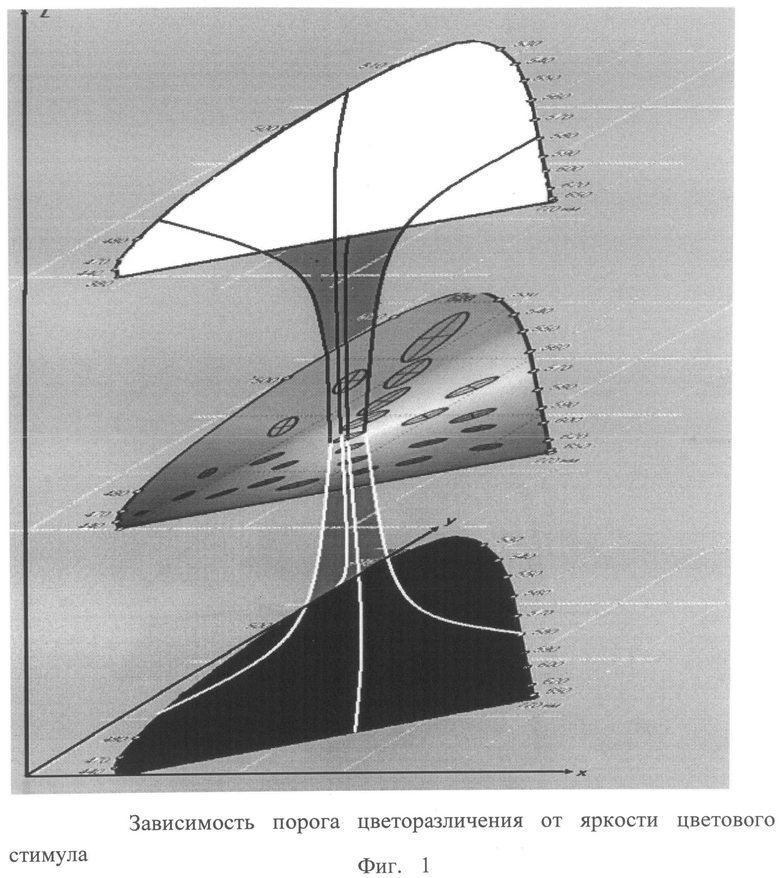
Опыты по определению порогов цветоразличения Мак Адам проводил при относительно постоянной яркости цветового стимула. Если менять яркость стимула, то можно определить следующие особенности: при значительном уменьшении яркости стимула - порог цветоразличения будет увеличиваться, вследствие того, что колбочки «отключаются» в процесс восприятия включается «палочковый» механизм зрения, имеет место эффект Пур-кунье («ночью все кошки серые»). При нулевой яркости цветового стимула порог цветоразличения становится равным бесконечности, точнее ограничивается локусом реальных цветов.
При увеличении яркости до достаточно больших значений глаз также становится цветослепым. Это явление можно объяснить тем, что распад йодапсина (светочувствительное вещество колбочек глаза) будет происходить быстрее, нежели его восстановление.
Совокупность этих явлений можно проиллюстрировать фиг.1, которая в сильной степени похоже на рисунок, отображающий решение уравнения Эйнштейна, сделанный астрофизиком Шварцшильдом [5].
Уравнения Эйнштейна связывают между собой свойства материи, присутствующей в искривленном пространстве-времени, с его кривизной. Они являются простейшими (наиболее линейными) среди всех мыслимых уравнений такого рода. Выглядят они следующим образом [6]:

где Rab - тензор Риччи, получающийся из тензора кривизны пространства-времени Rabcd посредством свертки его по паре индексов, R - скалярная кривизна, то есть свернутый тензор Риччи, gab - метрический тензор, Λ - космологическая постоянная, a Tab представляет собой тензор энергии-импульса материи, (π - число, с - скорость света в вакууме, G - гравитационная постоянная Ньютона). Так как все входящие в уравнения тензоры симметричны, то в четырехмерном пространстве-времени эти уравнения равносильны скалярным уравнениям.
Уравнения Эйнштейна не налагают никаких ограничений на используемые для описания пространства-времени координаты, то есть обладают свойством общей ковариантности, то они ограничивают выбор лишь 6 из 10 независимых компонент симметричного метрического тензора. Поэтому их решение неоднозначно без введения некоторых ограничений на компоненты метрики, соответствующих однозначному заданию координат в рассматриваемой области пространства-времени, и называемых поэтому обычно координатными условиями. Решая уравнения Эйнштейна совместно с правильно подобранными координатными условиями, можно найти все 10 независимых компонент симметричного метрического тензора. Этот метрический тензор (метрика) описывает свойства пространства-времени в данной точке и используется для описания результатов физических экспериментов. Он позволяет задать квадрат интервала в искривленном пространстве:

который определяет «расстояние» в физическом (метрическом) пространстве. Символы Кристоффеля метрического тензора определяют геодезические линии, по которым объекты (пробные тела) двигаются по инерции.
Как видно в (2), в правой части используются такие физические константы, как гравитационная постоянная Ньютона G, скорость света с, и тензор энергии-импульса материи Tab, значения, компонент которого равно нулю для момента времени, когда наступает статический режим состояния материи в замкнутом пространстве-времени, т.е. движение материи будет отсутствовать. А космологическая постоянная Λ также (для данного конкретного случая) равна нулю.
Тогда уравнение (2) примет следующий вид:

Введем понятие цветовой тензор.
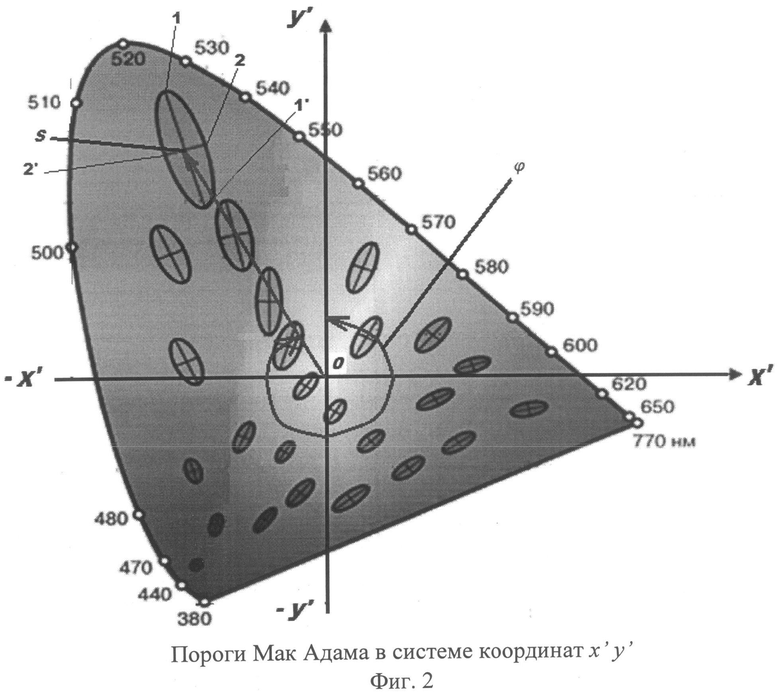
Любой точке на цветовом локусе можно сопоставить некий цветовой вектор. Для начала свяжем такие понятия, как цветовая насыщенность и цветовой тон, с системой координат CIE 31(x, y). Для чего сделаем параллельный перенос осей х, у так, чтобы начало координат совпадало с координатами «белого» цвета. Очевидно, для системы CIE 31 (x, y) это будет цветность равноэнергетического источника Е с координатами xE=0,333 и yE=0,333. Тогда цветовой локус будет иметь вид, как это изображено на фиг.2.
На фиг.2 длина вектора 0S отображает цветовую насыщенность центра эллипса Мак Адама, а угол φ - цветовой тон.
Поскольку все вектора типа 0S (фиг.2) начинаются из нулевой точки, то длина этих векторов (цветовая насыщенность) определяется простым выражением типа: 
Цветовой вектор может быть представлен следующей матрицей:
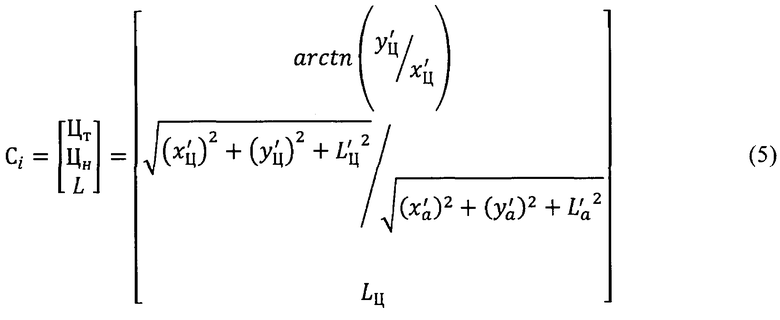
Разложив вектор (5) по ортам базиса е1, e2, e3, получим двух валентный симметричный цветовой тензор Cab. Суть этого тензора заключается в задании координат для метрического тензора в (2) конкретной точки на цветовой диаграмме. Здесь мы будем рассматривать систему МКО 1931 г. (x, y), причем с переносом начало координат, как это было сказано выше. Пожалуй, в качестве цветовой диаграммы можно использовать любую из известных систем МКО. С учетом сказанного, перепишем (5):
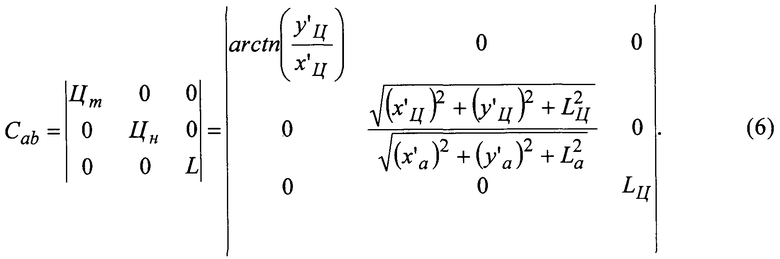
Цветотехнические величины Цm, Цн и L (или значения координат) можно определить, например, с помощью [7].
Выразим яркость в (6) аналогично, как это делается для цветового пространства системы CIELAB (1.17), т.е. 
Согласно закону Бугера-Фехнера порог по яркости равен 0,01 от текущей яркости, тогда длина вектора яркости от центра эллипсоидов определится следующим образом:

Согласно определению, если вектора или тензор связан с конкретной точкой, а другая группа векторов либо другой тензор связан с другой точкой некоторой области и т.д. Сделав это, заполним эту область (пространство) тензорами или группами векторов для каждой точки пространства, получим векторное поле или тензорное поле. В дальнейшем будем говорить только о тензорном поле. Чтобы отметить конкретную точку пространства Р, с которой связан конкретный тензор данного тензорного поля, запишем Р как аргумент

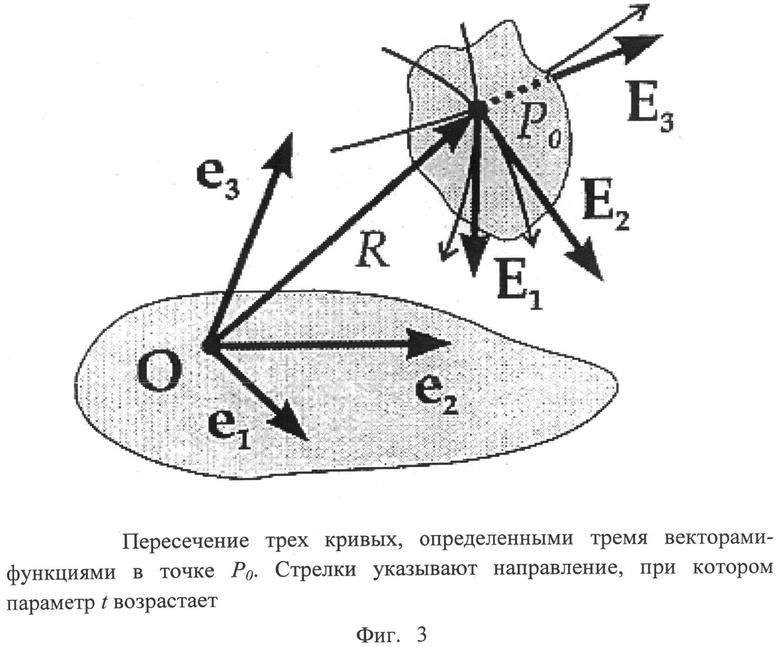
Очевидно, что сказанное выше относится к цветовому локусу с конкретными эллипсами Мак Адама (фиг.3), а координаты точки Р задает цветовой тензор Cab (6).
Далее, каждый порог цветоразличения (эллипс Мак Адама для порогов по цветности, либо эллипсоидов для порогов цветоразличения) представляют собой замкнутую фигуру и в случае рассмотрения трехмерного цветового пространства - эллипсоида, то в качестве системы координат удобней применять сферическую систему, являющуюся частным случаем криволинейной системой координат.
В декартовых координатах отображение 
Таким образом, в сферических координатах каждую точку Р представляем как радиус-вектор r0 в некоторой вспомогательной декартовой системе координат и затем рассмотрим отображение 

Здесь имеем биективное отображение 
Для правой стрелки имеем:
Продифференцируем все функции (10) и (11) и рассмотрим частные производные. Введем обозначения:

Частные производные (12) - ни что иное как матрицы Якоби, если их разместить в две квадратные матрицы S и Т:

Подставив в (11) аргументы 



Из (14) или (15) видно, что матрицы S и Т взаимно обратные, т.е. Т=S-1.
Подставим (10) в (9) и учтем, что функция (10) предполагается дифференцируемыми функциями от трех переменных х1, х2, х3. Тогда вектор-функция:

Вектор-функция R(x1, х2, х3), определенная (16), - есть главный вектор-функция криволинейной системы координат. Предположим Р0 - некоторая фиксированная точка в пространстве, заданная своими криволинейными координатами 



Подставив (17) в (16), получим вектор-функцию одной переменной t:

Аналогично, для двух других векторов-функций:


Это означает, что все три кривые, определяемые тремя вектор-функциями (18), (19) и (20), пересекаются в одной точке Р0 (фиг.3).
Сделаем следующее замечания. Так как размеры эллипсов Мак Адама различны и зависят от цветности, то коэффициенты трансформации эллипсов в равновеликие окружности будут различны (то же самое можно сказать об эллипсоидах). Отсюда следует, что новый базис для новой системы будет меняться от эллипса к эллипсу.
Обратимся к фиг.3, на которой изображены три координатные линии. Найдем касательные векторы к ним в точке P0. Для этого нужно продифференцировать вектор-функцию (18), (19) и (20) по переменной t и затем подставить t=0 в полученные производные:

Подставим (16) в (21) с учетом (12), получим:

Формулу (22) перепишем в следующем виде:

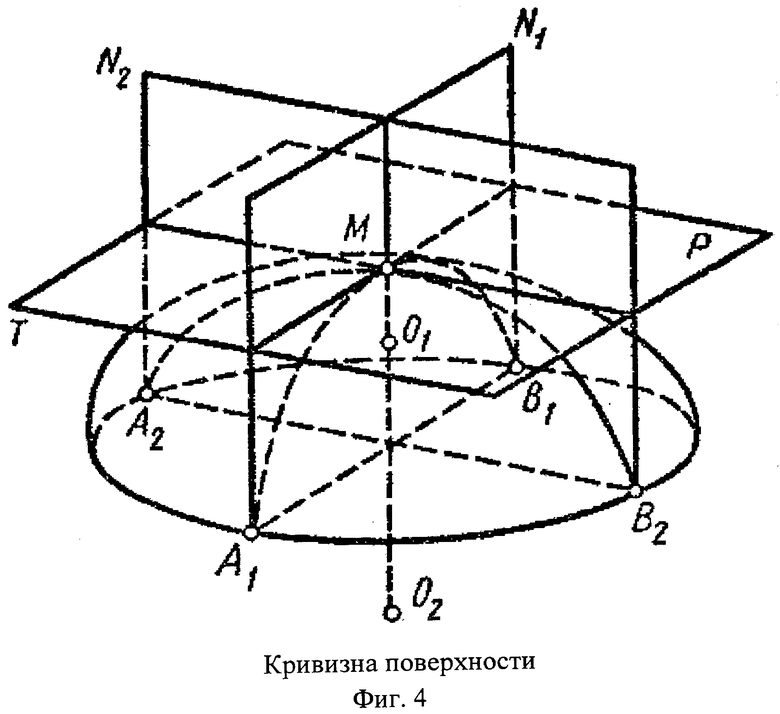
Вследствие того, что Т=S-1, тогда detS≠0, кроме того формула (23) означает, что касательные векторы к координатным линиям образуют базис Е1, E2, E3 (фиг.4). А поскольку базис Е1, Е2, E3 связан с конкретной точкой P0 пространства и он перемещается, то он называется подвижным репером криволинейной системы координат. В процессе их движения векторы подвижного репера Е1, Е2, E3 не просто перемещаются от точки к точке, они могут изменять свои длины, а также углы, которые они образуют друг с другом. Поэтому, в общем случае, подвижный репер E1, Е2, E3 - это косоугольный базис.
В настоящее время существует, согласно литературным данным, большое количество решений уравнения Эйнштейна. Решить уравнение Эйнштейна - значит найти вид метрического тензора gab пространства-времени. Существуют также чисто математические классификации решений, основанные на топологических свойствах, описываемого ими пространства-времени, или, например, на алгебраической симметрии тензора Вейля данного пространства.
Рассмотрим компоненты тензоров уравнения (4). В уравнение Эйнштейна входит тензор кривизны - тензор Риччи. Рассмотрим структуру данного тензора. Как известно [8], тензор Риччи был получен из классического тензора кривизны путем его свертки, согласно:

где Rrj - тензор Риччи,

Формулу (24) для тензора Риччи можно преобразовать к следующему виду:

Из тензора Риччи можно построить скаляр R по следующей формуле:

Скаляр R(x1, х2), определенный (26), - есть скалярная кривизна пространства поверхности в точке с координатами х1, х2. Скалярная кривизна - это полная свертка тензора кривизны R:

Переход от компонент тензора 







Но согласно формуле Гаусса следует:

где К - гауссова кривизна.
Рассмотрим фиг.4 [9]. Проведем плоскость Р, касательную к поверхности. Через точку М касания перпендикулярно этой плоскости рассечем поверхность двумя взаимно перпендикулярными плоскостями N1 и N2. На поверхности образуются две пересекающие в точке М кривые А1МВ1 и А2МВ2. Тогда средняя кривизна поверхности в точке М - есть величина:

где r1 и 
r2 и 
В случае сферической поверхности r1=r2=r0 имеем:
Подставим (31) в (29), получим скалярную кривизну сферы порога цветоразличения:

Значение r0 можно задать совершенно произвольно, но будет естественно задать радиус r0 равным порогу цветоразличения исходной цветовой системы (табл.1). Тогда, для исходной системы CIE 1931 г. (x, y) примем r0=0,0059, (сфера, как известно, является пространство постоянной кривизны), тогда из (32) следует R=677.966.
Уравнение (4) с учетом R=677.966 можно записать:

где координаты метрического тензора определяются цветовым тензором Cab (6) для конкретной точки М цветового локуса.
К примеру, для системы CIELAB (МКО 1976 г. (а∗, b∗)), имеем: r0=3.0624, R=1.306.

Выше были определены все компоненты тензоров модифицированного уравнения А.Эйнштейна (4). Рассмотрим подробней матрицу перехода из декартовой системы координат в косоугольную систему (частный случай сферической системы) в базисе подвижного репера. Новое пространство является пространством Римана. Причем, как уже говорилось, сфера, к которой мы стремимся, является пространство постоянной кривизны. Основной особенностью пространства постоянной кривизны является их однородность, столь же полная, как и в евклидовом пространстве. Эта однородность выражается в существовании группы движений от такого же числа параметров, как и в евклидовом пространстве, т.е. n(n+1))/2, где n - мерное пространство и для n=3 имеем число параметров, равное 2. Основной идеей пространства постоянной кривизны является его однородность по всем направлениям в каждой точке [8].
Для определения матрицы перехода из евклидового пространства в сферическое пространство поступим следующим образом. Как известно, уравнение, описывающее эллипсоид вращения в трехмерном пространстве, имеет вид [10] (это уравнение предполагает, что центр эллипсоида совпадает с началом координат):
где x, y, z - текущие координаты, которые для удобства в дальнейшем будем обозначать как: x'1,x'2,x'3 (индексы 1, 2 и 3 не означают степень числа x');
a, b, d - геометрическая длины полуосей эллипсоида, а по яркости согласно закона Бугера-Фехнера длина будет рана 0,01 от текущей яркости.
Уравнение сферы определяется [10]:

Сравнив уравнение сферы (36) и уравнение эллипсоида (35), можно легко преобразовать (35) к виду (36), т.е. можно записать:

Из (37) видно, что квадрат радиуса трансформируемой сферы равен произведению квадратов полуосей эллипсоида.
Введем в (37) коэффициент 

где r0 - радиус полученной сферы, одинаков для всех эллипсоидов на цветовой диаграмме.
Из (38) получим матрицу перехода из декартовой системы координат, в которой даны исходные эллипсоиды Мак Адама (система CIE 1931 г. (x, y), вернее система (x', y'), у которой начало координат сдвинуто в точку равноэнергетического источника с координатами x=y=0,3333 в сферическую систему координат, в которой предполагается отображение сфер порогов цветоразличения.
Введем обозначения:
Fl=b2d2; F2=a2d2; F3=a2b2(1-d2),
тогда матрица перехода:
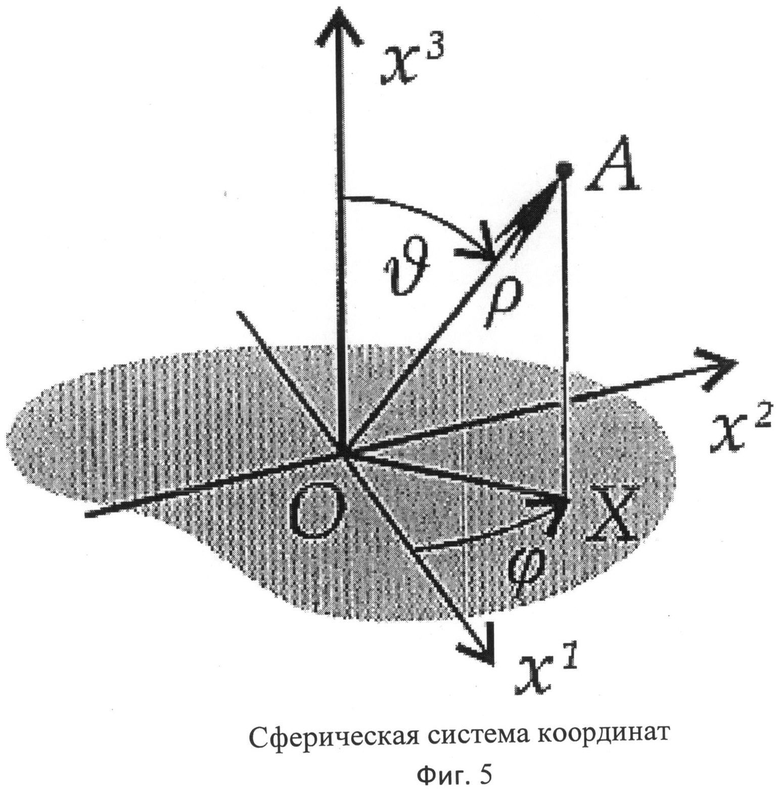
В сферической системе координат положение любой точки определяется длиной радиуса-вектора и двумя углами, один из которых определяет азимут (горизонтальный угол φ - фиг.5) и склонение (вертикальный угол υ - фиг.5). Поэтому формулу (38) перепишем следующим образом, учитывая, что

Тогда, метрический тензор для сферической системы координат можно переписать в виде:
Интервал в этой метрике равен:

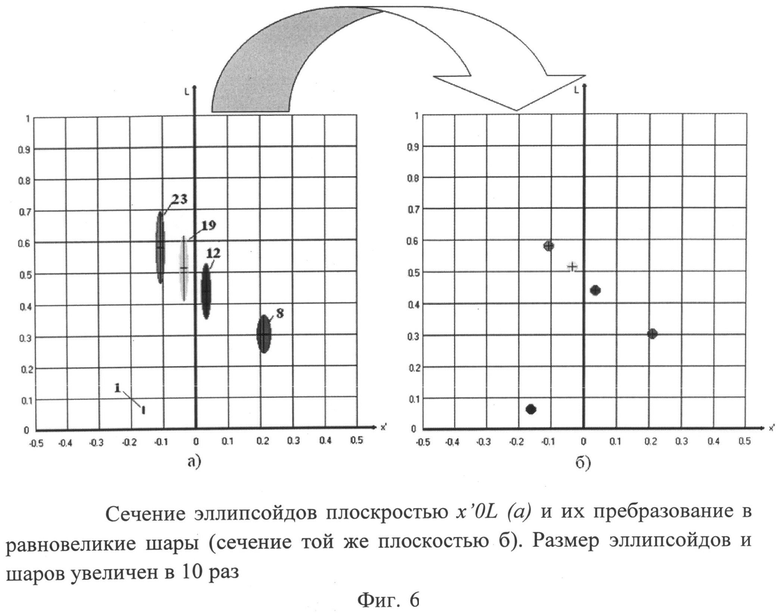
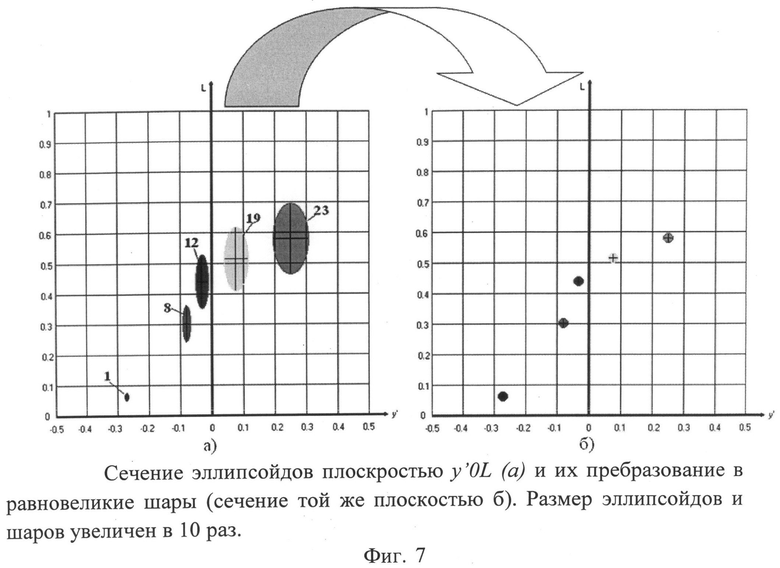
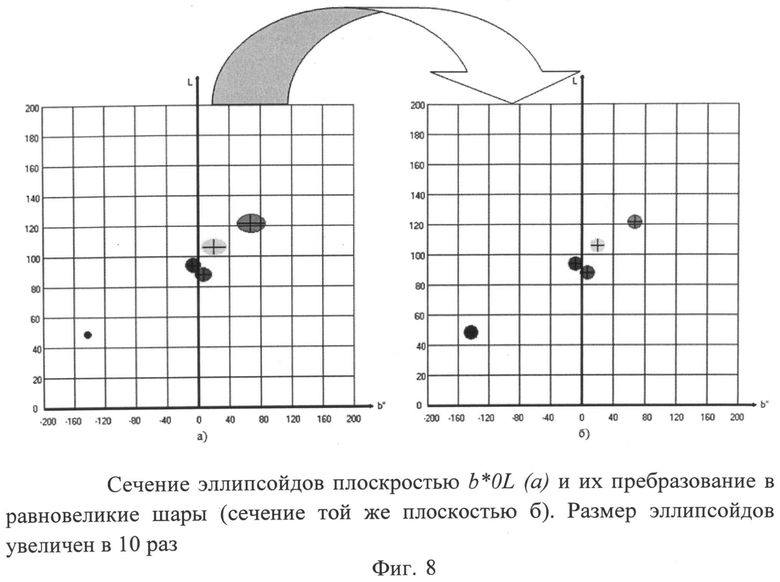
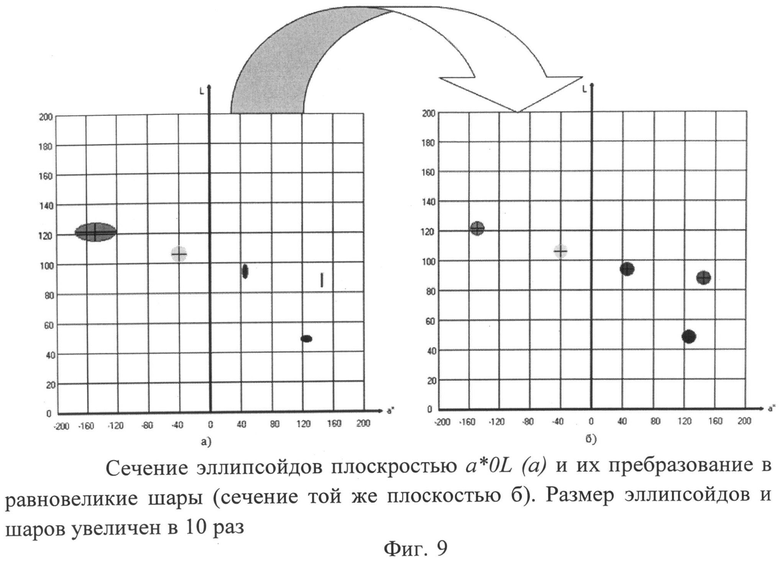
На фиг.6 и 7 показаны результаты преобразования цветового пространства CIE 1931 г. (x, y), а фиг.8 и 9 - для цветового пространства CIELAB.
Источники информации
1. Р. Аззам, Н. Башара. Эллипсометрия и поляризованный свет. Перевод с английского под редакцией чл.-корр. АН СССР А.В. Ржанова и д-ра физ.-мат. Наук К.К. Свиташева. Изд-во «Мир» - М.: 1981, 594 с.
2. Ложкин Л.Д. Дифференциальная колориметрия:монография. / Л.Д. Ложкин. Самара: ИУНЛ ПГУТИ. 2010 - 320 с.
3. Jimenez J.R., Hita E., Romero J., Jimenez L. Scalar curvature of space as a source of information of new uniformity aspects concerning to color representation systems. [Text] - in J.: Optics (Paris), vol. 24, №6, 1993. P.243-249.
4. MacAdam D.L. Visual sensitivities to color differences in day light. [Text] / D.L. Mac Adam // Josa. - 1942. - Vol.32. - №24.
5. Schwarzschild К. Über das Gravitationsfeld eines Massenpunktes nach der Einsteinschen Theorie // Sitzungsberichte der Königlich Preussischen Aka-demie der Wissenschaften 1-1916. - 189-196. Рус. пер.: Шварцшильд К.О гравитационном поле точечной массы в эйнштеновской теории // Альберт Эйнштейн и теория гравитации. М.: Мир, 1979. С.199-207
6. Albert Einstein. (1916). «-Die Grundlage der allgemeinen Relativitätstheorie». Annalen der Physik354 (7): 769-822. (Русский перевод в сборнике: Альберт Эйнштейн и теория гравитации: Сборник статей / Под ред. E. Куранского. - М.: Мир, 1979. 592 с. С.146-196).
7. Ложкин Л.Д., Тяжев А.И. Многоцветный колориметр // Патент на полезную модель №93977 от 10.05.2010, бюл. №13. МПК G01J 3/50 (2006.01) Заявка №2008132343 от 5.08.2008. Приоритет от 5.08.2008.
8. Фок В.А. Теория пространства, времени и тяготения. - М.: ГИТТЛ, 1955. 504 с.
9. Чертов А.Г. Физические величины. Справочное издание. М.: «Высшая школа». - 1990. - 336 с.
10. Выгодский М.Я. Справочник по высшей математике. Изд-во «Наука», главная редакция физико-математической литературы. М.: 1973., - с.872.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЦВЕТОВЫХ РАЗЛИЧИЙ (ВАРИАНТЫ) | 2011 |
|
RU2477843C2 |
| СВЕТОВОЙ МОДУЛЬ, СИСТЕМА ОСВЕЩЕНИЯ И СПОСОБ ВСТРАИВАНИЯ ДАННЫХ В ИЗЛУЧЕННЫЙ СВЕТ | 2009 |
|
RU2526845C2 |
| Экспериментальный способ параметризации трехмерных тел сложной геометрии | 2017 |
|
RU2665499C1 |
| СПОСОБ ОБРАБОТКИ ЦВЕТНОГО ПОЛУТОНОВОГО ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ВЕКТОРНОЙ ДИФФУЗИИ ОШИБКИ ЦВЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2190306C2 |
| АВТОСТЕРЕОСКОПИЧЕСКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ ВОЗБУЖДЕНИЯ | 2015 |
|
RU2695285C2 |
| Способ обработки сложных поверхностей | 1986 |
|
SU1393548A1 |
| Способ определения напряженности магнитного поля дипольного источника | 1984 |
|
SU1267306A1 |
| ЭКСПЕРИМЕНТАЛЬНЫЙ СПОСОБ ПАРАМЕТРИЗАЦИИ МИНИМАЛЬНЫХ ПОВЕРХНОСТЕЙ СО СЛОЖНЫМ КОНТУРОМ | 2007 |
|
RU2374697C2 |
| СПОСОБ И СИСТЕМА КАЛИБРОВКИ КАМЕРЫ | 2012 |
|
RU2601421C2 |
| Способ и устройство для измерения характеристик колонки породы для создания модели поровой системы | 2020 |
|
RU2812143C1 |
Изобретение относится к преобразованию цветового пространства. За исходное цветовое пространство могут использоваться известные цветовые системы CIE 1931 г. (x, y), CIE 1960 г. (u, v), CIELAB и другие цветовые системы. Техническим результатом является расширение функциональных возможностей за счет учета яркости стимула. Способ равноконтрастного цветоразличения двух и более объектов заключается в том, что за счет перехода от традиционных цветовых пространств МКО в новое цветовое пространство, в котором порог цветоразличения отображается сферой (шаром), диаметр которого равен этому порогу, преобразование старого цветового пространства осуществлено с помощью измененного уравнения Эйнштейна, описывающего искривленное пространство-время. В новом цветовом пространстве координаты метрического тензора определяются цветовым тензором, космологическая постоянная и тензор энергии-импульса равны нулю, а индексы метрического тензора пробегают значения 1, 2 и 3. 9 ил.
Способ равноконтрастного цветоразличения двух и более объектов, отличающийся тем, что за счет перехода от традиционных цветовых пространств МКО в новое цветовое пространство, в котором порог цветоразличения отображается сферой (шаром), диаметр которого равен этому порогу, преобразование старого цветового пространства осуществлено с помощью измененного уравнения Эйнштейна, описывающего искривленное пространство-время, в котором координаты метрического тензора определяются цветовым тензором, космологическая постоянная и тензор энергии-импульса равны нулю, а индексы метрического тензора пробегают значения 1, 2 и 3, что позволяет измененному уравнению Эйнштейна описать новое трехмерное цветовое пространство.
| ЛОЖКИН Л.Д | |||
| Анализ и разработка систем объективной колориметрии в цветном телевидении// Автореф | |||
| канд | |||
| дис | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| ИЗМАЙЛОВ Ч.А | |||
| и др | |||
| Восприятие цветных предметов | |||
| - Экспериментальная психология | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| J.R.JIMÉNEZ et al | |||
| "SCALAR CURVATURE OF COLOR SPACE AS A SOURCE OF INFORMATION OF NEW UNIFORMITY ASPECTS | |||

