Изобретение относится к отраслям, связанным с моделированием трехмерных тел с гранями сложной геометрии, в частности деталей машин, элементов строительных конструкций, транспортных средств, космической техники, приборов, оборудования и т.д., и определением их метрики для последующего численного анализа сплайновым вариантом метода конечных элементов.
Известны способы определения кривизны и уклонов профиля поверхности дорожного покрытия в двух различных направлениях, включающие измерение параметров движения автомобиля, определение и корректировку базиса отсчета относительно плоскости, анализ упомянутых данных с помощью ЭВМ, нахождение уклонов дорожного покрытия в двух различных направлениях и выдачу на экран монитора измерительно-вычислительного комплекса расчетных параметров в процессе движения автомобиля (патент РФ №2114391, М. кл. G01С 7/04, опубл. 27.06.1998) (аналог).
Однако известные способы не позволяют моделировать трехмерные тела сложной геометрии.
Известны экспериментальные способы параметризации минимальных поверхностей, основанные на решении двухмерного уравнения Лапласа (на примере постановки внутренней задачи Дирихле, когда известны краевые значения координат и необходимо найти внутренние), в котором выставляют вертикальные стержни на необходимую высоту относительно опорной плоскости согласно требованиям задачи, с помощью измерительного прибора выверяют точность установки стержней, посредством фиксатора закрепляют стержни на необходимой высоте, натягивают на вертикальные стержни заранее изготовленную сеть из гибкого эластичного материала, с помощью высокоточного измерительного прибора замеряют высотные координаты во внутренних точках (точках пересечения) эластичной гибкой сети (патент РФ №2121166, М. кл. G09В 23/04, опубл. 27.10.1998) (аналог).
Указанные способы не позволяют получать непрерывные и гладкие контуры произвольной конфигурации, свободно ориентированные в трехмерном пространстве (все контуры имеют прерывистый дискретный характер).
Известен также экспериментальный способ параметризации минимальных поверхностей со сложным контуром, включающий операции фиксации гибкого элемента относительно основания, натягивания на него заранее изготовленной сети из эластичного материала, замера координат узловых точек сети относительно основания, в котором изготавливают пространственный каркас из криволинейных формообразующих элементов, натягивают на каркас первоначально прямоугольную в плане сеть из эластичного материала, причем каждую узловую контурную точку сети закрепляют на соответствующих точках каркаса, распределенных по длине формообразующего элемента по определенной закономерности. При этом поверхность формируют и параметризируют по узловым точкам сети относительно выбранной системы координат, выполняют обработку полученных результатов с определением компонент метрики поверхности (патент РФ №2374697, М. кл. G09В 23/04, опубл. 27.11.2009) (прототип).
Указанный способ обладает следующими недостатками:
а) способ не позволяет описать контуры трехмерных тел произвольной конфигурации, свободно ориентированных в пространстве;
б) способ не позволяет моделировать поверхности трехмерных тел сложной геометрии;
в) в способе не предусмотрено вычисление метрики внутренних узловых точек изучаемого тела (компонент метрического тензора);
г) в способе не предполагается определение параметров метрики тела в трехмерной системе координат.
Задачами (целью) изобретения является повышение эффективности моделирования трехмерного тела сложной геометрии, повышение точности описания тел с криволинейными гранями и снижение трудоемкости вычисления компонент метрического тензора узлов сетки трехмерного тела.
Указанные задачи достигаются тем, что в экспериментальном способе параметризации трехмерных тел сложной геометрии, включающем операции изготовления сети из эластичного материала и пространственного каркаса из гибких криволинейных элементов, образующих заданный контур, фиксации каркаса относительно основания, натягивания на каркас сети из эластичного материала, замера координат узловых точек сети относительно основания, формируют пространственный каркас из двенадцати ребер, представляющих контурные ребра трехмерного тела со сложной геометрией, натягивают на ребра каркаса трехмерную сеть из эластичного материала в виде параметрического куба с назначенным типом разбивки на ячейки в виде параллелепипедов, при этом тип разбивки назначают или равномерным, или с заданной закономерностью, причем каждую узловую контурную точку сети закрепляют на соответствующих точках каркаса, распределенных по длине криволинейных ребер каркаса в соответствии с выбранным типом разбивки. Контурный каркас фиксируют относительно опорных плоскостей трех оснований и закрепляют на нем сеть, замеряют координаты узловых точек деформированной (преобразованной) сети в трехмерной системе координат относительно опорных плоскостей оснований. При необходимости более четкой идентификации соответствующих узлов окрашивают узловые точки в разные цвета. После замеров координат узлов x(t1,t2,t3); y(t1,t2,t3); z(t1,t2,t3) деформированной сети в трехмерной системе координат относительно опорных плоскостей оснований определяют радиус-векторы в узлах сетки по формуле:

где х, у, z - координаты в декартовой системе;
t1, t2 и t3 - координаты (параметры) параметрического куба (верхние индексы 1, 2 и 3 - индексы, показывающие направление координат);
 ,
,  ,
,  - единичные орты в декартовой системе координат.
- единичные орты в декартовой системе координат.
Выполняют обработку полученных результатов с определением координатных векторов по формулам:



где  ,
, и
и  - координатные векторы;
- координатные векторы;
i, j, k - идентификационные номера узловых точек по соответствующим направлениям координатных осей в трехмерном пространстве.
Выполняют обработку полученных результатов с определением компонент метрики узловых точек деформированной сети моделируемого трехмерного тела. Метрику узловых точек деформированной сети моделируемого трехмерного тела определяют по формуле:



где g11, g12, g13, g21, g22, g23, g31, g32, g33 - ковариантные компоненты первого основного метрического тензора.
При необходимости осуществляют сглаживание полученных результатов в процессе их обработки. В общем случае, вместо параметрического куба используют параметрический параллелепипед.
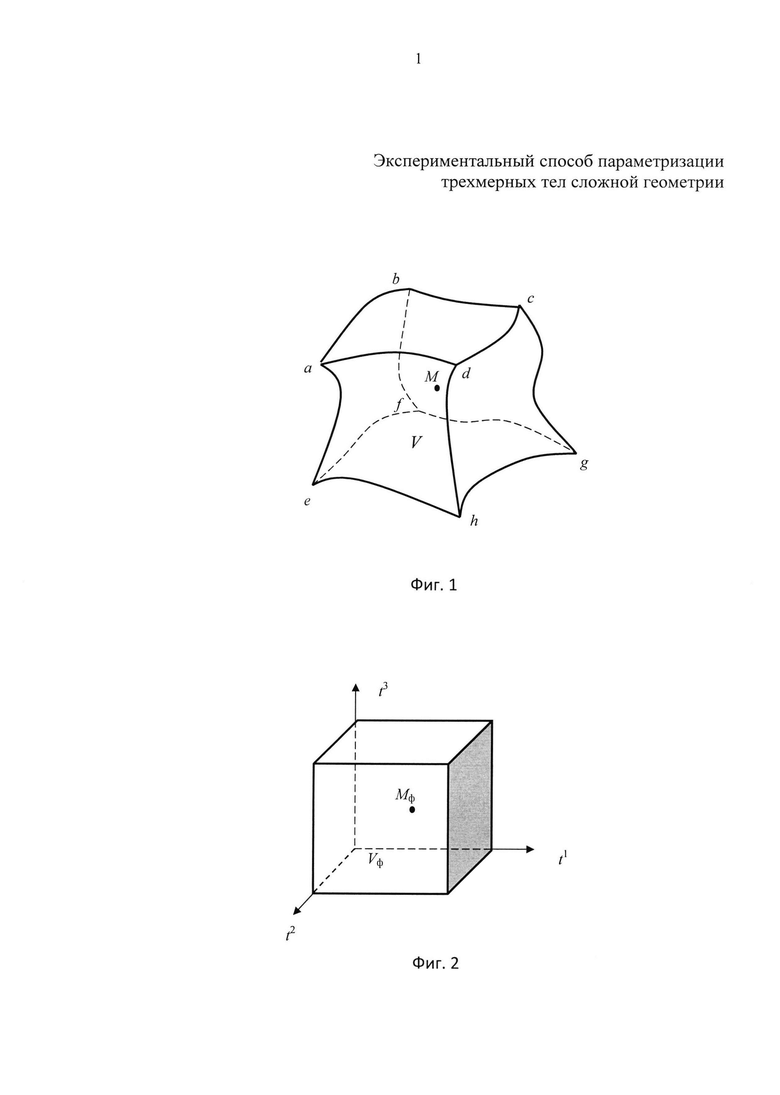
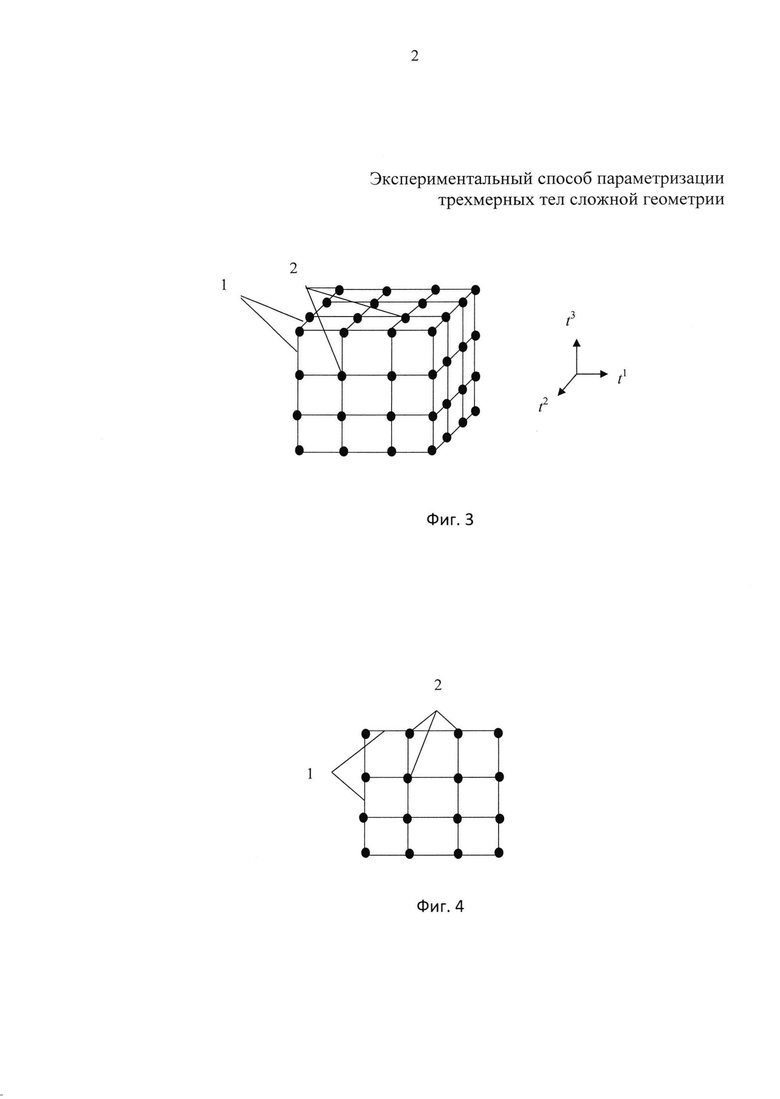
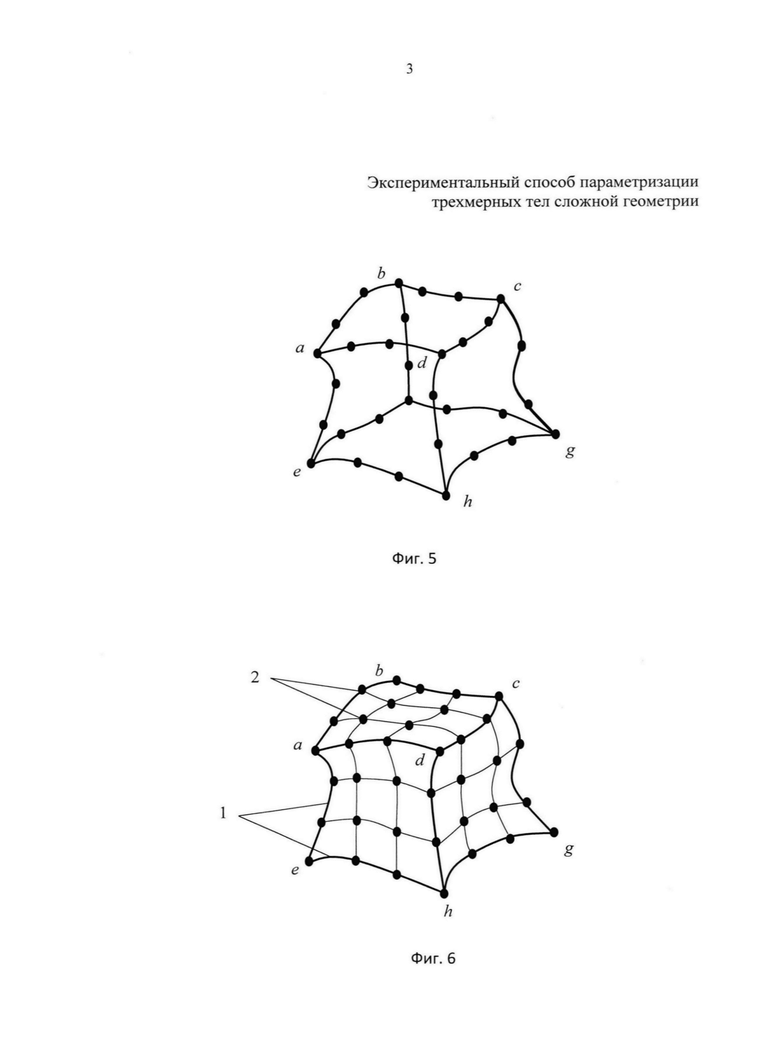
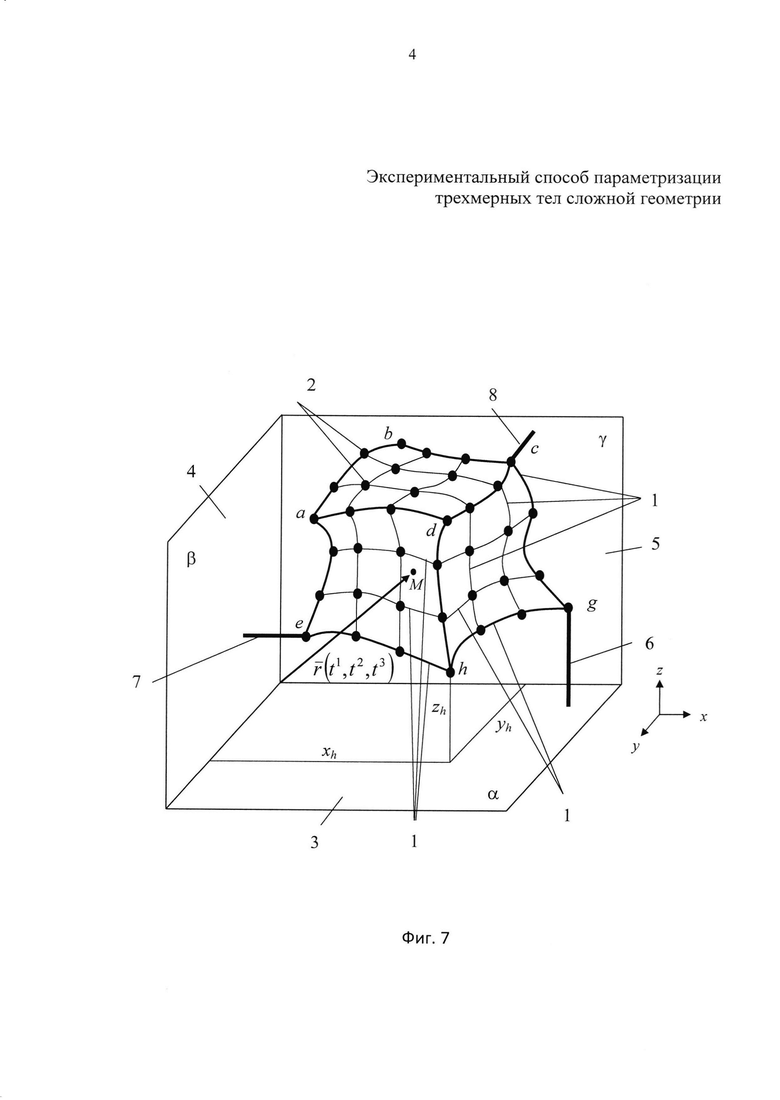
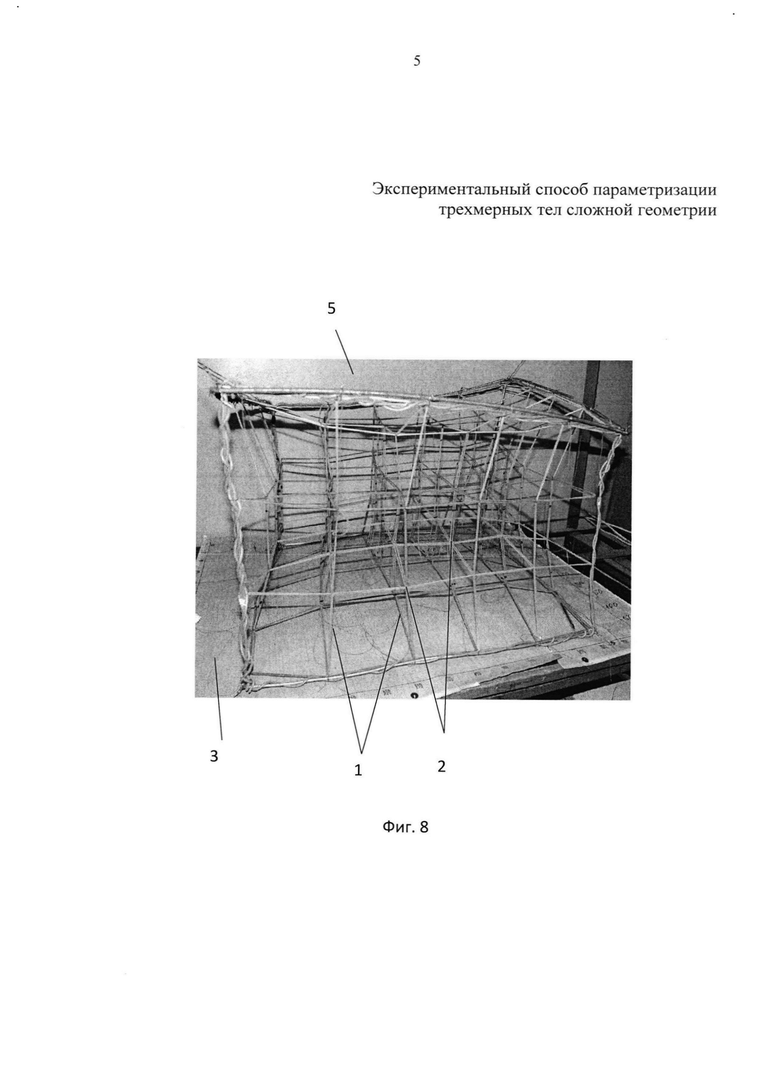
На фиг. 1 изображено тело сложной геометрии, подлежащее параметризации (в данном случае это шестигранное тело с вершинами а, b, с, d, e, f, g, h); на фиг. 2 - параметрический куб с координатами t1, t2 и t3; на фиг. 3 изображена схема сети из эластичного материала в виде куба с узловыми точками, соответствующего параметрическому кубу; на фиг. 4 представлена схема фрагмента сети; на фиг. 5 приведена схема разбиения ребер каркаса; на фиг. 6 представлена схема формирования узлов трехмерного тела сложной геометрии, образуемого при наложении узлов ребер сети из эластичного материала на соответствующие контурные узлы каркаса тела (схема разбиения трехмерного тела на заданное число трехмерных элементов); на фиг. 7 показана схема получения координат узловых точек на экспериментальной установке (на примере точки h); на фиг. 8 показана фотография реального воплощения способа.
На фигурах обозначены:
х, у, z - координаты в декартовой системе;
xh, yh, zh - координаты точки h в декартовой системе;
t1, t2 и t3 - координаты (параметры) параметрического куба (верхние индексы 1, 2 и 3 - индексы, показывающие направление координат);
V - объем, который занимает формируемое трехмерное тело сложной геометрии;
Vф - объем, который занимает параметрический куб в координатах t1, t2 и t3 (параметры t1, t2 и t3 изменяются в частном случае, от 0 до 1);
М - произвольная точка формируемого тела (принадлежит объему V, включая поверхность тела);
Мф - произвольная точка в параметрическом кубе (принадлежит объему Vф, включая поверхность параметрического куба), соответствующая произвольной точке М формируемого тела;
α, β, γ - ортогональные плоскости базисных оснований экспериментальной установки;
 - радиус-вектор произвольной точки М области V.
- радиус-вектор произвольной точки М области V.
Способ осуществляют следующим образом.
На подготовительном этапе изготавливают сеть из упругого материала, состоящего из эластичных (например, резиновых) нитей 1, которые соединены в узлах 2. Для наглядности и облегчения замеров нити для каждого слоя берут разных цветов. В расправленном состоянии сеть представляет собой куб, который называют параметрическим (фиг. 3). При этом узлы расположены на эластичных нитях с выбранным типом разбивки на ячейки в виде параллелепипедов в каждом из трех измерений по параметрам t1, t2 и t3. Разбивка может быть двух типов: первый тип - равномерная разбивка, второй тип - разбивка по заданной закономерности. В итоге получают параметрический куб, состоящий из отдельных ячеек в виде параллелепипедов. Параметрический куб занимает объем Vф в координатах t1, t2 и t3. В частном случае выбирают параметры t1, t2 и t3 в пределах от 0 до 1.
Параметрический куб можно собрать, например, в следующем порядке. Собирают заданное число фрагментов в виде плоских прямоугольных сетей из эластичных нитей 1, соединенных в узлах 2 с необходимой разбивкой. Эти фрагменты располагают друг над другом и соединяют в узлах эластичными нитями с равной длиной между узлами, формируя пространственную сеть. При необходимости отдельные фрагменты подвешивают на вспомогательные кронштейны на период сборки пространственного каркаса.
Далее собирают пространственный каркас abcdefgh из гибких криволинейных формообразующих ребер каркаса (например, из кусков гнущейся проволоки), обозначенных как элементы ab, bc, cd, da, ef, fg, gd, de, ea, fb, gc, hd в соответствии с заданным контуром задаваемого (параметризуемого) тела. На гибких криволинейных элементах ab, bc, cd, da, ef fg, gd, de, ea, fb, gc, hd делают метки в соответствии с заданным типом разбивки. При необходимости более четкой идентификации соответствующих узлов узловые (отмеченные) точки окрашивают в разные цвета, соответствующие цветам сети.
Далее каркас фиксируют относительно базисных оснований 3, 4 и 5 (с плоскостями, соответственно, α, β и γ) при помощи, например, опор 6, 7 и 8. Допускается провести фиксацию всех 8 вершин каркаса abcdefgh.
На указанный каркас натягивают сформированную пространственную сеть из эластичного материала. При этом обеспечивают фиксацию соответствующих узловых точек сети с узловыми (отмеченными) точками каркаса. Допускается выполнить операцию натягивания сети из эластичного материала на каркас до фиксации каркаса на базисных основаниях 3, 4 и 5. При этом внешние узловые точки при натяжении сети представляют собой грани формируемого тела, а внутренние узловые точки - расчетные точки тела.
Далее приступают к процедуре параметризации рассматриваемого тела. Для этого производят замеры координат узловых точек деформированной сети относительно оснований 3, 4 и 5 с применением соответствующих измерительных инструментов (приборов) по осям х, у и z при соответствующих параметрах t1 t2 и t3 единичного куба с областью Vф, то есть получают координаты x(tl, t2, t3); y(t1, t2, t3); z(tl, t2, t3) и определяют радиус-векторы в узлах сетки по формуле:

где  ,
,  ,
,  - единичные орты в декартовой системе координат.
- единичные орты в декартовой системе координат.
Данные могут быть представлены в виде таблиц.
Алгоритм построения пространственной сети и вычисления ее параметров осуществляется в следующей последовательности:
1. Дифференцируя выражение (1) по t1, t2 и t3, определяют координатные векторы  ,
,  и
и  :
:

Конкретно выражение (2) расписывают следующим образом:



где i, j, k - идентификационные номера узловых точек по соответствующим направлениям координатных осей в трехмерном пространстве.
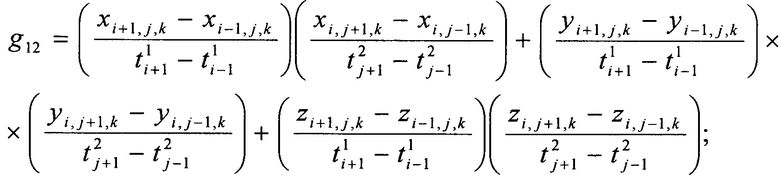
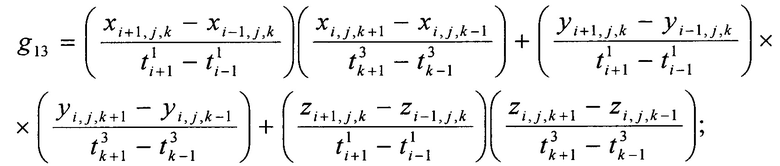
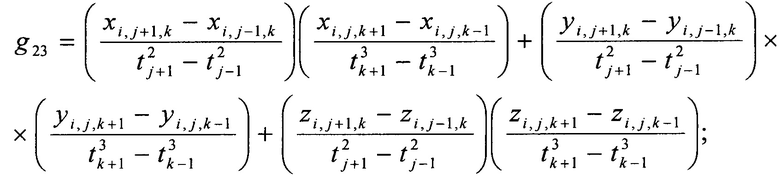
2. Определяют ковариантные компоненты первого основного метрического тензора g11, g12, g13, g21, g22, g23, g31, g32, g33:


Конкретно выражение (3) расписывают следующим образом:





3. Аналогично определяют контравариантные компоненты первого основного метрического тензора g11, g12, g13 g21, g22, g23 g31, g32, g33:
4. Далее определяют фундаментальный определитель g:

5. Дифференцируя ковариантные компоненты первого основного метрического тензора (3) по t1 t2 и t3, определяют их первые производные:
6. Определяют символы Кристоффеля второго рода по общей формуле:

Выражение (7) развернуто записывают в виде:


















Таким образом, для формируемого тела получают:
- значения координат x(t1, t2, t3), y(tl, t2, t3), z(tl, t2, t3);
- ковариантные компоненты метрического тензора g11, g12, g13, g21, g22, g23, g31, g32, g33;
- контравариантные компоненты метрического тензора g11, g12, g13 g21, g22, g23, g31, g32, g33;
- символы Кристоффеля для параметров t1, t2 и t3 параметрического куба.
При необходимости осуществляют сглаживание полученных результатов в процессе их обработки.
В общем случае, вместо параметрического куба используют параметрический параллелепипед.
Пример параметризации трехмерного тела сложной геометрии.
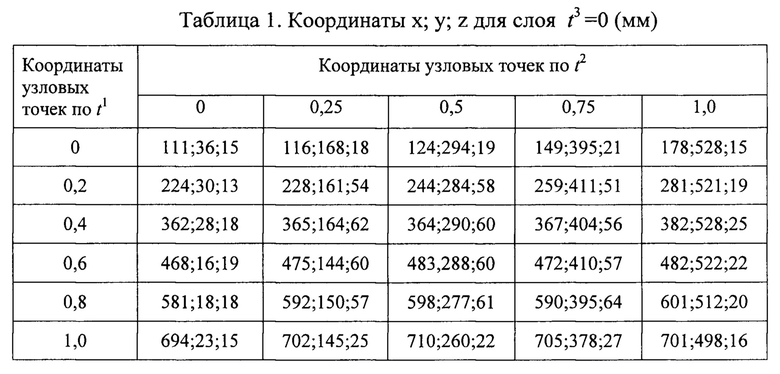
Был изготовлен проволочный каркас с криволинейными контурами из 12 отрезков проволоки, совпадающих с ребрами имитируемого трехмерного тела сложной геометрии. Также была изготовлена параметрическая сеть из эластичного материала (резиновых кольцевых нитей), размеры которой в ненатянутом состоянии во всех направлениях меньше, чем габаритные размеры проволочного каркаса. Параметрическая сеть была составлена из ячеек с обозначением узловых точек во всех указанных направлениях: 4 ячейки - в одном направлении, 5 ячеек - в другом направлении и 6 ячеек - в третьем направлении. На каркас натянули параметрическую сеть из эластичного материала (фиг. 8). При этом узловые точки сети стыковались с соответствующими узловыми точками каркаса путем привязывания фиксирующими нитками.
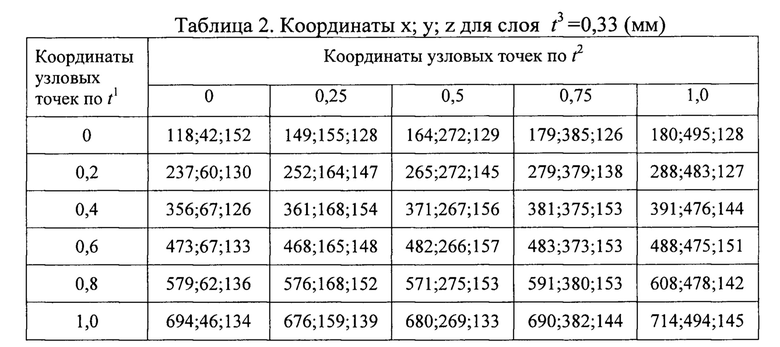
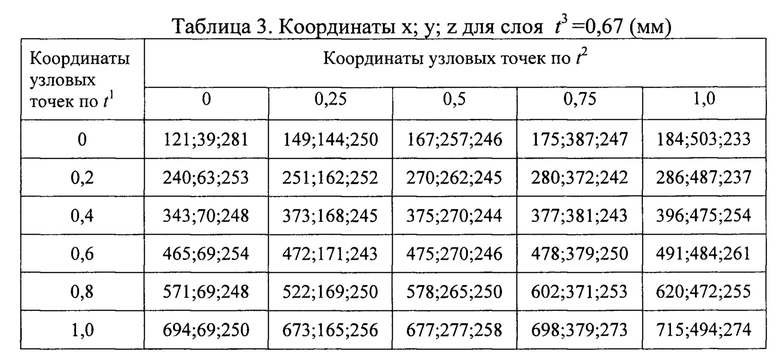
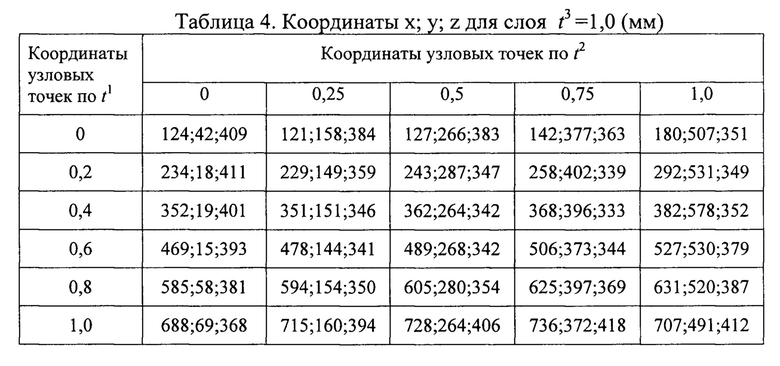
Все вершины каркаса неподвижно закрепили относительно трех опорных плоскостей при помощи фиксаторов. Далее замерили координаты узловых точек. Значения замеренных координат всех узлов по направлениям х, у и z для исследуемой формируемого тела сложной геометрии приведены в таблицах 1-4.
Далее, согласно алгоритма вычисления параметров сети определили координатные векторы  ,
,  и
и  по формуле (2), ковариантные компоненты первого основного метрического тензора g11, g12, g13, g21, g22, g23, g31, g32, g33 по формуле (3), контравариантные компоненты первого основного метрического тензора g11, g12, g13 g21, g22, g23, g31, g32, g33 согласно выражению (4), фундаментальный определитель g по формуле (5) и, наконец, символы Кристоффеля.
по формуле (2), ковариантные компоненты первого основного метрического тензора g11, g12, g13, g21, g22, g23, g31, g32, g33 по формуле (3), контравариантные компоненты первого основного метрического тензора g11, g12, g13 g21, g22, g23, g31, g32, g33 согласно выражению (4), фундаментальный определитель g по формуле (5) и, наконец, символы Кристоффеля.
Предложенный способ позволяет описать контуры трехмерных тел произвольной конфигурации, свободно ориентированных в пространстве, а также моделировать поверхности трехмерных тел сложной геометрии. Вычисление метрики внутренних узловых точек изучаемого тела (компонент метрического тензора) дает возможность эффективно определить параметры метрики тела в трехмерной системе координат. Таким образом, повышается эффективность моделирования трехмерного тела сложной геометрии, а также точность описания тел с криволинейными гранями и снижается трудоемкость вычисления компонент метрического тензора узлов сетки трехмерного тела. Способ является эффективным средством решения самых разнообразных прикладных задач и может найти широкое применение в проектных организациях и учебных заведениях при проектировании и изучении различных тел сложной геометрии, а также при расчетах напряженно-деформированного состояния конструкций сложной геометрии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАРАМЕТРИЗАЦИИ ЛОКАЛЬНЫХ УГЛУБЛЕНИЙ НА ЦИЛИНДРИЧЕСКИХ ТЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2517149C2 |
| ЭКСПЕРИМЕНТАЛЬНЫЙ СПОСОБ ПАРАМЕТРИЗАЦИИ МИНИМАЛЬНЫХ ПОВЕРХНОСТЕЙ СО СЛОЖНЫМ КОНТУРОМ | 2007 |
|
RU2374697C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО СЕЙСМОМЕТРА | 1990 |
|
RU2022302C1 |
| МЕХАНИЗМ НАВЕСКИ ЭЛЕМЕНТА МЕХАНИЗАЦИИ КРЫЛА НА ОСНОВНОЙ ЧАСТИ КРЫЛА И УСТРОЙСТВО УБОРКИ И ВЫПУСКА ЭЛЕМЕНТА МЕХАНИЗАЦИИ КРЫЛА, ИМЕЮЩЕЕ ТАКОЙ МЕХАНИЗМ | 2010 |
|
RU2529588C2 |
| МЕТОД ОЦЕНКИ ЭРОЗИИ ГОРНА, ЭЛЕКТРОННОЕ ОБОРУДОВАНИЕ И НОСИТЕЛЬ ДАННЫХ | 2021 |
|
RU2837520C2 |
| МЕТОД СМЕШИВАНИЯ ЗВУКОВЫХ КАНАЛОВ С ИСПОЛЬЗОВАНИЕМ КОРРЕЛИРОВАННЫХ ВЫХОДНЫХ ДАННЫХ | 2005 |
|
RU2365063C2 |
| Способ имитации траекторий движения объектов | 2015 |
|
RU2617144C1 |
| СИСТЕМА ДЛЯ ГЕНЕРАЦИИ ВИДЕО С РЕКОНСТРУИРОВАННОЙ ФОТОРЕАЛИСТИЧНОЙ 3D-МОДЕЛЬЮ ЧЕЛОВЕКА, СПОСОБЫ НАСТРОЙКИ И РАБОТЫ ДАННОЙ СИСТЕМЫ | 2024 |
|
RU2834188C1 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ НЕТТО ЖЕЛЕЗНОДОРОЖНЫХ ГРУЗОВ ДВИЖУЩЕГОСЯ ПОЕЗДА | 1992 |
|
RU2077032C1 |
Экспериментальный способ параметризации трехмерных тел сложной геометрии относится к отраслям, связанным с моделированием трехмерных тел с гранями сложной геометрии. Способ включает операции изготовления сети из эластичного материала и пространственного каркаса из гибких криволинейных элементов, образующих заданный контур, фиксации каркаса относительно основания, натягивания на каркас сети из эластичного материала, замера координат узловых точек сети относительно основания. При этом формируют пространственный каркас из двенадцати ребер, представляющих контурные ребра трехмерного тела со сложной геометрией. Натягивают на ребра каркаса трехмерную сеть из эластичного материала в виде параметрического куба с назначенным типом разбивки на ячейки в виде параллелепипедов. Тип разбивки назначают или равномерным, или с заданной закономерностью, причем каждую узловую контурную точку сети закрепляют на соответствующих точках каркаса, распределенных по длине криволинейных ребер каркаса в соответствии с выбранным типом разбивки. Контурный каркас фиксируют относительно опорных плоскостей трех оснований и закрепляют на нем сеть, замеряют координаты узловых точек деформированной сети в трехмерной системе координат относительно опорных плоскостей оснований. Далее определяют радиус-векторы в узлах сетки и определяют координатные векторы и метрику узловых точек деформированной сети моделируемого трехмерного тела. Техническим результатом изобретения является повышение эффективности моделирования трехмерного тела сложной геометрии, повышение точности описания тел с криволинейными гранями и снижение трудоемкости вычисления компонент метрического тензора узлов сетки трехмерного тела. 3 з.п. ф-лы, 4 табл., 8 ил.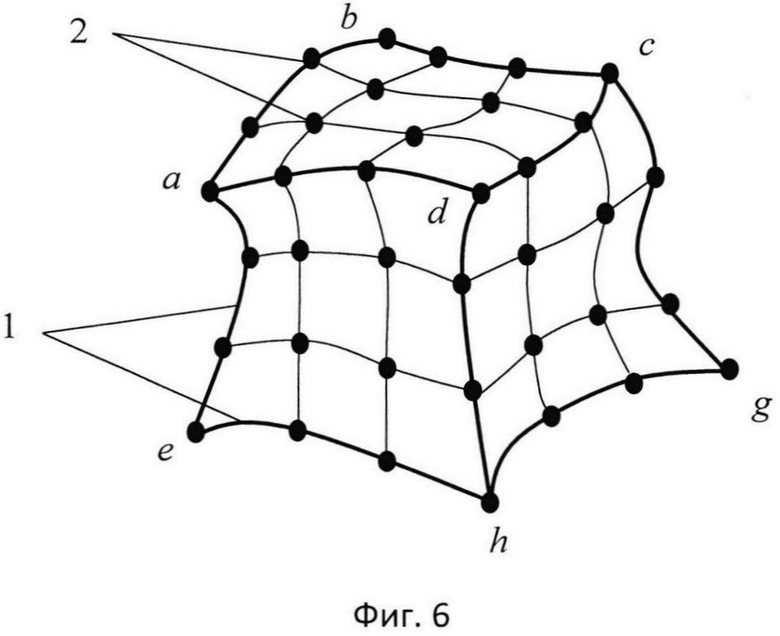
1. Экспериментальный способ параметризации трехмерных тел сложной геометрии, включающий операции изготовления сети из эластичного материала и пространственного каркаса из гибких криволинейных элементов, образующих заданный контур, фиксации каркаса относительно основания, натягивания на каркас сети из эластичного материала, замера координат узловых точек сети относительно основания, отличающийся тем, что формируют пространственный каркас из двенадцати ребер, представляющих контурные ребра трехмерного тела со сложной геометрией, натягивают на ребра каркаса трехмерную сеть из эластичного материала в виде параметрического куба с назначенным типом разбивки на ячейки в виде параллелепипедов, причем каждую узловую контурную точку сети закрепляют на соответствующих точках каркаса, распределенных по длине криволинейных ребер каркаса в соответствии с выбранным типом разбивки, при этом контурный каркас фиксируют относительно опорных плоскостей трех оснований и закрепляют на нем сеть, замеряют координаты узловых точек деформированной (преобразованной) сети в трехмерной системе координат относительно опорных плоскостей оснований, после замеров координат узлов x(t1, t2, t3); y(t1, t2, t3); z(t1, t2, t3) деформированной сети в трехмерной системе координат относительно опорных плоскостей оснований определяют радиус-векторы в узлах сетки по формуле

где x, y, z - координаты в декартовой системе;
t1, t2 и t3 - координаты (параметры) параметрического куба (верхние индексы 1, 2 и 3 - индексы, показывающие направление координат);
 ,
,  ,
,  - единичные орты в декартовой системе координат,
- единичные орты в декартовой системе координат,
затем выполняют обработку полученных результатов с определением координатных векторов по формулам



где  ,
,  и
и  - координатные векторы;
- координатные векторы;
i, j, k - идентификационные номера узловых точек по соответствующим направлениям координатных осей в трехмерном пространстве,
далее выполняют обработку полученных результатов с определением компонент метрики узловых точек деформированной сети моделируемого трехмерного тела, а метрику узловых точек деформированной сети моделируемого трехмерного тела определяют по формуле



где g11, g12, g13, g21, g22, g23, g31, g32, g33 - ковариантные компоненты первого основного метрического тензора.
2. Способ по п. 1, отличающийся тем, что тип разбивки ребер каркаса назначают или равномерным, или с заданной закономерностью.
3. Способ по п. 1, отличающийся тем, что при необходимости более четкой идентификации соответствующих узлов окрашивают узловые точки в разные цвета.
4. Способ по п. 1, отличающийся тем, что осуществляют сглаживание полученных результатов в процессе их обработки.
| ЭКСПЕРИМЕНТАЛЬНЫЙ СПОСОБ ПАРАМЕТРИЗАЦИИ МИНИМАЛЬНЫХ ПОВЕРХНОСТЕЙ СО СЛОЖНЫМ КОНТУРОМ | 2007 |
|
RU2374697C2 |
| СПОСОБ ПАРАМЕТРИЗАЦИИ ЛОКАЛЬНЫХ УГЛУБЛЕНИЙ НА ЦИЛИНДРИЧЕСКИХ ТЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2517149C2 |
| УЧЕБНЫЙ ПРИБОР ПО ГЕОМЕТРИИ | 1987 |
|
RU2010343C1 |
| US 20050032029 A1, 10.02.2005 | |||
| WO 1998004891 A1, 05.02.1998. | |||

