Изобретение относится к области авиационной техники, в частности, к светотехническим средствам обеспечения посадки летательных аппаратов (ЛА) в любое время суток на взлетно-посадочную полосу (ВПП), в том числе на полевые и необорудованные площадки, на не категорированные аэродромы и т.д.
Известен способ формирования посадочной траектории при помощи световых лучей, включающий установку вблизи ВПП нескольких источников света и придание им угловой ориентации, обеспечивающей равенство угла между осью светового пучка, формирующего посадочную траекторию, и плоскостью горизонта требуемому углу наклона глиссады. Этот способ описан в «Приложении 14. Аэродромы» к «Конвенции о международной гражданской авиации», Издание пятое. Июль 2009. Применение указанного способа обеспечивает формирование глиссадного участка неподвижной в пространстве посадочной траектории летательного аппарата. Формирование участка траектории наиболее ответственного и сложного этапа посадки (участка траектории выравнивания) известный способ не обеспечивает, что приводит к снижению безопасности посадки летательных аппаратов.
Известны способы формирования оптической посадочной траектории, при которых осуществляется формирование трех ее участков, описанные в патенте US 2996947, опубл. 22.08.1961, а также в патенте US 4196346, опубл. 01.04.1980. Согласно этим способам вблизи ВПП, на различном удалении от ее торца и вдоль ее оси устанавливают три световых излучателя разного цвета, придают им относительно плоскости горизонта различную угловую ориентацию таким образом, чтобы углы наклона трех участков сформированной световыми лучами посадочной траектории были равны соответственно углу пробивания облачности, углу наклона глиссады, углу наклона участка траектории выравнивания в точке над торцом ВПП, а затем фиксируют все три излучателя в этом положении. К недостаткам таких известных способов относится прежде всего невозможность оперативного изменения конфигурации посадочной траектории применительно к типу заходящего на посадку ЛА, а также к изменяющимся метеоусловиям, не обеспечивается также возможность формирования траектории выравнивания от точки начала выравнивания до точки касания летательным аппаратом посадочной полосы. Кроме того, при заходе на посадку по сформированной такими известными способами посадочной траектории при смене участка (при изменении заданного угла наклона траектории) возможна обусловленная инерционностью самолета его просадка по высоте, что также может привести к снижению безопасности полетов.
Известны и другие способы формирования оптической посадочной траектории летательных аппаратов, в которых используются несколько источников излучения света описанные, например, в а.с. SU 1828036 A1, в патентах RU 69018 U1, RU 2369532 C2, RU 2317233 C2, RU 2234440 C2, US 3509524 A1, в заявке US 2011/0121997 A1, в книге «Лазерные навигационные устройства», Зуев В.Е., Фадеев В.Я., М., Радио и связь, 1987, и т.д.
Во всех таких известных способах формирования оптических посадочных траекторий летательных аппаратов используются несколько излучателей света, устанавливаемых под разными углами к плоскости ВПП, каждый из которых формирует свой участок посадочной траектории. При этом сформированная посадочная траектория представляет собой ломаную линию. Существенным недостатком всех таких известных способов с использованием нескольких излучателей света является необходимость принятия дополнительных мер по обеспечению перехода самолета с одного участка посадочной траектории на другой, т.к. при таком переходе всегда будут иметь место "переходные процессы", проявляющиеся в бросках по крену и рысканию, провалах по высоте. Эти переходные процессы порождаются динамическим запаздыванием в контурах системы управления и временем реакции летчика (при ручном управлении). Такие явления имеют место и при выполнении заходов на посадку по существующим радиотехничским посадочным средствам, например, при переходе с вычисленной траектории возврата на аэродром на радиотехническую глиссаду, при переходе с крейсерской высоты полета на полет на высоте круга, а также в других случаях.
Изобретение направлено на повышение безопасности полетов ЛА за счет повышения безопасности выполнения их посадки, в том числе в условиях недостаточной видимости или недостаточной освещенности ВПП, при недостаточном количестве визуальных ориентиров в районе ВПП, в сложных метеоусловиях, а также в случаях, когда необходимо осуществлять высокоточное приземление ЛА в заданной точке, например, на аэродромах с короткими ВПП, при наличии объектов в зоне захода на посадку, при наличии сложного рельефа в зоне аэродрома.
Этот технический результат обеспечивается за счет того, что предлагаемый способ формирования оптической посадочной траектории летательного аппарата включает использование одного излучателя света для формирования трех участков посадочной траектории, соответствующих трем этапам посадки летательного аппарата, при этом на начальном этапе посадки формируют участок траектории пробивания облачности, для этого излучатель света разворачивают относительно плоскости горизонта таким образом, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для текущих метеоусловий углу пробивания облачности θпр, и фиксируют излучатель света в этом положении, при достижении летательным аппаратом высоты, соответствующей нижнему краю облачности, формируют глиссадный участок посадочной траектории, для этого излучатель света поворачивают таким образом, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для данного типа летательного аппарата углу наклона глиссады θгл, и фиксируют излучатель в этом положении, затем в зависимости от текущих метеоусловий в районе аэродрома выбирают тип участка выравнивания посадочной траектории, в зависимости от типа летательного аппарата определяют высоту начала выравнивания, и в момент достижения летательным аппаратом определенной высоты выравнивая начинают изменять угловую ориентацию светового пучка излучателя относительно плоскости горизонта таким образом, чтобы угол отклонения светового пучка излучателя от плоскости горизонта в каждый выбранный момент времени совпадал с углом наклона выбранной траектории участка выравнивания. При этом, излучатель света размещают в точке, находящейся на расстоянии от торца ВПП и на расстоянии от продольной оси ВПП, при этом угол между продольной осью ВПП и осью диаграммы направленности излучателя света в горизонтальной плоскости определяется в зависимости от ширины диаграммы направленности излучателя света и равен ее половине. Излучатель света может быть размещен стационарно или с возможностью перемещения по аэродрому на транспортном средстве. Целесообразно использование в качестве излучателя света источника лазерного излучения.
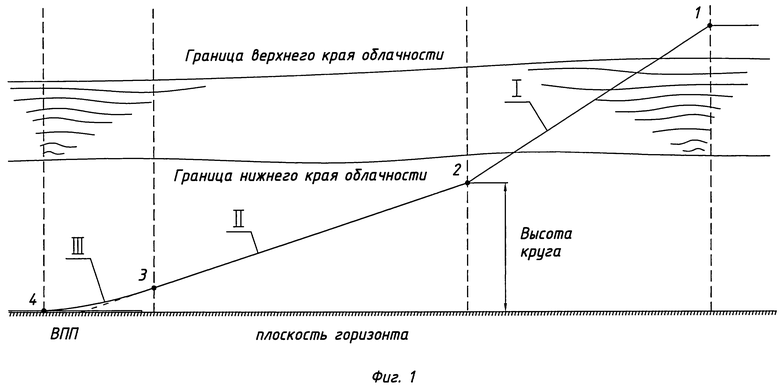
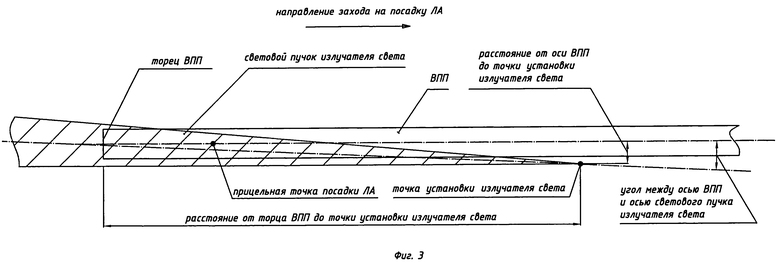
Изобретение поясняется графическими материалами, где на фиг.1 показана посадочная траектория ЛА, включающая участок пробивания облачности I, глиссадный участок II, участок выравнивания III. На фиг.1 обозначены характерные точки этой траектории: 1 - точка начала снижения, 2 - точка начала снижения по глиссаде, 3 - точка начала выравнивания, 4 - точка приземления. На фиг.2 показана схема одноосного колесного модуля, который может быть использован в качестве компактного мобильного носителя излучателя света. На фиг.3 показана в плане схема размещения излучателя света относительно ВПП с учетом направления на посадку ЛА.
Предлагаемый способ формирования оптической посадочной траектории осуществляется следующим образом. Вблизи ВПП размещают излучатель света. При этом точка (место размещения) излучателя света относительно ВПП определяется в зависимости от расположения расчетной точки касания ЛА ВПП (прицельной точки посадки), которая определяется располагаемой посадочной дистанцией (см. раздел 5.2. Приложения 14 Аэродромы к «Конвенции о международной гражданской авиации». Издание 5, июль 2009 г), т.е. геометрическими размерами ВПП, при этом угол между осью диаграммы направленности излучателя света и осью ВПП определяется шириной диаграммы направленности излучателя света в горизонтальной плоскости и равен его половине. Применительно к излучателю света с шириной диаграммы направленности 5° в горизонтальной плоскости были определены места установки излучателя света относительно ВПП с различной располагаемой длиной посадочной дистанции (см. Таблицу). В этом случае угол между осью ВПП и оптической осью излучателя должен составлять 2,5°.
Проведенные эксперименты показали, что целесообразно размещение излучателя света в зависимости от длины располагаемой посадочной дистанции в точке, размещенной на расстоянии 600-1000 м от торца ВПП и на расстоянии 25-50 м от ее оси.
На начальном этапе посадки формируют траекторию пробивания облачности. Для этого оптический излучатель разворачивают относительно плоскости горизонта таким образом, чтобы угол отклонения его светового пучка от этой плоскости был равен требуемому для текущих метеоусловий углу пробивания облачности θпр, затем фиксируют оптический излучатель в этом положении.
Информация о типе ЛА и текущей высоте h, на которой находится ЛА в каждый задаваемый момент времени может быть передана как с борта ЛА в наземную посадочную аппаратуру, так и получена, определена, известными навигационными средствами наземной посадочной аппаратуры, которые широко используются в известных способах обеспечения посадки ЛА, включающих формирование его посадочной траектории, см. например, "Раздел 2. Эксплуатационные ограничения" Руководства по летной эксплуатации (РЛЭ) (необходимо указать библиографические данные: год публикации - обязательно и место публикации, желательно).
При достижении ЛА высоты, соответствующей нижнему краю облачности, при помощи излучателя света формируют глиссадный участок посадочной траектории. Для этого излучатель света разворачивают относительно плоскости горизонта таким образом, чтобы угол отклонения его светового пучка от этой плоскости был равен требуемому для данного типа воздушного судна углу наклона глиссады θгл и фиксируют излучатель света в этом положении. При этом летчик наблюдая, получает визуальную информацию о положении в пространстве глиссадного участка посадочной траектории.
В зависимости от текущих метеоусловий в районе аэродрома на земле выбирают тип траектории выравнивания (жесткая или гибкая) и ее конфигурацию (дуга окружности, экспонента, парабола и др.). Одной из траекторий выравнивания, обеспечивающей, в частности, комфортные условия приземления ЛА, как известно, является экспоненциальная траектория выравнивания. Такая траектория имеет место, когда в каждый момент времени вертикальная скорость снижения ЛА 

На основе информации о типе ЛА из базы данных, хранящейся в наземной посадочной аппаратуре, выбирают потребные для данного типа ЛА параметры траектории выравнивания: посадочную скорость V; допустимую нормальную перегрузку Δny max; допустимую вертикальную скорость приземления
Затем определяют потребную высоту начала выравнивания h0. Как известно, например, для экспоненциальной траектории выравнивания эта высота определяется так:

В момент достижения заходящим на посадку ЛА высоты начала выравнивания, т.е. при h=h0, прекращают осуществлять угловую стабилизацию излучателя света на заданном угле θгл и начинают изменять угловую ориентацию его светового пучка относительно плоскости горизонта для формирования выбранной траектории выравнивания. При этом угол отклонения светового пучка излучателя от плоскости горизонта в каждый заданный момент времени будет совпадать с углом наклона выбранной траектории выравнивания. В частности, для экспоненциальной траектории выравнивания световой пучок излучателя разворачивают относительно плоскости горизонта по закону 
В качестве излучателя света может быть использована компактная мобильная лазерная трехцветная навигационная система на основе импульсных полупроводниковых лазеров с электронной накачкой, разработанная в НПП «Гамма» и описанная, например, в статье И. Олихова, Л. Косовского «Мобильная лазерная трехцветная навигационная система. Надежность в экстремальных ситуациях», опубликованной в журнале «Электроника - Наука, Технология, Бизнес» №3, 1999. Этот лазерный излучатель характеризуется компактными размерами, малой массой, низким энергопотреблением, высокой стабильностью характеристик излучения. При этом средняя дальность устойчивого наблюдения излучения составляет: ночью (дальность видимости 10 км) - 15 км; солнечным днем при дымке (дальность видимости 8 км) - 6 км; днем при снеге (дальность видимости 1,5-2 км) - 2,5 км.
Для перемещения и установки излучателя света, его разворотов, необходимых для реализации предлагаемого способа, может быть использован компактный мобильный носитель - одноосный колесный модуль, схематично показанный на фиг.2, где изображена платформа 5, шарнирно укрепленная на оси 6 колесной пары 7. Как показано на фиг.2, платформа 5 включает две размещенные на расстоянии друг от друга и параллельные друг другу и оси 6 колесной пары 7 части: 8 - нижняя, и 9 - верхняя, причем обе части 8 и 9 жестко связаны между собой посредством стоек 10. Место для размещения излучателя света предусмотрено на верхней части 9 платформы 5 (на фиг.2 не показано). При этом, центр масс ЦМ платформы 5 расположен над осью 6 колесной пары 7, преимущественно в геометрическом центре верхней части 9 платформы 5. Оба колеса колесной пары 7 являются ведущими, и повороты платформы 5 в плоскости горизонта осуществляются за счет управления разностью скоростей их вращения посредством приводных двигателей 11, 12, которые через редукторы осуществляют вращение колес колесной пары 7 и тем самым обеспечивают требуемые направление и скорость локомоционных движений модуля по поверхности аэродрома.
На нижней части 8 платформы 5 размещен силовой двухстепенный гироскоп 13 с датчиком момента 14, обеспечивающий управление угловой ориентацией платформы 5 вокруг оси 6 колесной пары 7. На верхней части 9 платформы 5 размещен балансировочный груз 15 с приводным двигателем 16 для парирования возмущающих моментов, приложенных к платформе 5, за счет перемещения балансировочного груза 15 в плоскости верхней части 9 платформы 5.
Также на платформе 5 размещена измерительная система (на фиг.2 не показана), обеспечивающая определение параметров углового и локомоционного движения модуля и содержащая датчик горизонта, датчики скоростей вращения колес, и, например, магнитометрические датчики, т.к. один из способов вывода светового луча излучателя света в точку начала формирования посадочной траектории и придание ему требуемой ориентации в азимуте относительно горизонтальной плоскости ВПП (2,5°) состоит в применении электромагнитной системы ориентации и навигации малого радиуса действия. Так, вблизи ВПП может быть установлен излучатель электромагнитного поля заданной конфигурации (на фигурах не показан), имеющий три антенны, при этом для измерения компонентов электромагнитного поля этого излучателя на платформе 5 устанавливают приемник электромагнитного излучения в виде трех соответствующих магнитометров. На основе обработки измерений магнитометров вычисляют дальность до излучателя электромагнитного поля, а также его взаимную ориентацию с приемником. Этот способ известен в данной области техники и описан, например, в следующих источниках информации: Плеханов В.Е., Электромагнитная система ориентации и навигации малого радиуса действия для точной посадки беспилотных летательных аппаратов, Авионика России, Энциклопедический справочник, 1999; Плеханов В.Е., Тювин А.В., Фещенко С.В., Черноморский А.И., Функциональные алгоритмы комплексной измерительной системы ориентации и навигации одноосной колесной транспортной платформы, Авиакосмическое приборостроение, 2006 г., №1.
Управление угловым положением платформы 5 модуля и ее стабилизация относительно плоскости горизонта вокруг оси 6 колесной пары 7 осуществляются в общем случае на основе комбинированного применения инерционного, гравитационного и гироскопического способов управления ориентацией.
При использовании инерционного способа осуществляется грубая стабилизация платформы 5 модуля в плоскости горизонта за счет момента сил инерции относительно оси 6 колесной пары 7, возникающего при управляемом ускоренном движении центра масс платформы 5. Это управление осуществляется путем подачи соответствующих напряжений на приводные электродвигатели 11 и 12 колес колесной пары 7.
При использовании гравитационного способа управления существует принципиальная возможность как стабилизации платформы 5 в плоскости горизонта, так и управления ее угловой ориентацией относительно плоскости горизонта. При этом в положении равновесия на заданном угле отклонения от плоскости горизонта равнодействующая сил тяжести платформы 5 и балансировочного груза 15 проходит через ось 6 колесной пары 7. Исполнительным элементом при таком способе управления является балансировочный груз 15, причем управление его перемещением осуществляется в функции параметров углового движения платформы 5.
Способ гироскопического управления и стабилизации реализуется так же, как в известных одноосных гироскопических стабилизаторах, описанных, например, в книге Репникова А.В., Сачкова Г.П., Черноморского А.И. «Гироскопические системы», М., Машиностроение, 1983. При использовании этого способа возможно осуществление как стабилизации платформы 5 в плоскости горизонта, так и управления ее угловой ориентацией относительно этой плоскости. При стабилизации платформы 5 парирование возмущающих моментов относительно оси 6 колесной пары 7 осуществляется гироскопическим моментом, а также моментом силы тяжести при перемещении балансировочного груза 15 по сигналам, в частности от датчика угла прецессии силового гироскопа. Управление балансировочным грузом 15 в этом случае необходимо для обеспечения силовой разгрузки гироскопа. Фактически модуль представляет собой особый тип гироскопического стабилизатора с маятниковостью верхней части 9 платформы 5, дополнительная особенность которого состоит в том, что силовым элементом в схеме его разгрузки является балансировочный груз 15, в то время как в традиционных гироскопических стабилизаторах таким элементом является датчик момента электромашинного типа. Кроме того, балансировочный груз 15 служит исполнительным элементом системы автоматической балансировки платформы 5 модуля. В режиме управления угловой ориентацией платформы 5 модуля на датчик момента гироскопа подается управляющий сигнал с одновременным перемещением балансировочного груза 15 для компенсации момента силы тяжести, возникающего при изменении углового положения платформы 5. Таким образом, имеет место комплексное применение гироскопического и гравитационного способов управления угловой ориентацией и стабилизации платформы 5 модуля.
Для реализации предлагаемого способа формирования трех частей посадочной траектории в одноосном колесном модуле предусмотрен набор характерных режимов движения:
- движение с постоянной скоростью и стабилизированной в плоскости горизонта платформой 5 с невысокой (на уровне единиц градусов) точностью - для обеспечения перемещений излучателя света в районе ВПП;
- развороты вокруг вертикальной оси (азимутальные развороты) за конечное время - для решения задачи ориентации излучателя света в азимуте;
- стояночный режим стабилизации излучателя света на заданном угле наклона глиссады в диапазоне значений 2°-20° со средней (на уровне десятков угловых минут) точностью - для обеспечения формирования участка пробивания облачности и глиссадного участка посадочной траектории;
- стояночный режим управления угловым положением излучателя света относительно плоскости горизонта по заданному закону с высокой (на уровне единиц угловых минут) точностью для обеспечения формирования участка выравнивания посадочной траектории.
Управление угловым положением излучателя относительно плоскости горизонта в одноосном колесном модуле осуществляется за счет прецессионного движения силового гироскопа вместе с платформой 5. Исполнительными элементами контура управления угловой ориентацией платформы относительно плоскости горизонта в этом случае являются балансировочный груз 15 и датчик момента гироскопа. Для обеспечения поворота платформы 5 вместе с излучателем относительно плоскости горизонта в процессе выравнивания на программный угол 

Под действием этого момента гироскоп 13 начнет прецессировать, увлекая за собой платформу 5 модуля с установленным на ней излучателем. При этом к платформе 5 вокруг оси 6 колес колесной пары 7 будут приложены возмущающие моменты: момент силы тяжести платформы 5 mglsinαп и инерционный момент, порождаемый ускоренным движением платформы 5 вокруг оси 6 колес колесной пары 
Для экспоненциальной траектории выравнивания программное перемещение балансировочного груза 15 следует осуществлять по закону:
Следует отметить, что для перемещения излучателя света по полю аэродрома может быть использовано любое другое, кроме описанного выше, транспортное средство.
Кроме того, для реализации предлагаемого способа излучатель света может быть установлен и без использования средств его перемещения по полю аэродрома, в том числе и описанного выше одноосного колесного модуля, т.е. стационарно, но при этом и стационарные средства его установки должны обеспечивать те же перемещения его светового луча, которые описаны выше.
Использование же мобильного носителя для его установки на поле аэродрома позволяет осуществлять посадку ЛА и на необорудованных аэродромах, например, в условиях экстренной посадки.
А использование в предлагаемом способе одного излучателя света, посредством которого формируется вся посадочная траектория ЛА за счет управления его угловым положением, дает летчику возможность получения информации о положении посадочной траектории с момента начала снижения с крейсерской высоты до касания ЛА поверхности ВПП, т.е. до его приземления, что позволяет в значительной мере избавиться от так называемых "провалов" и "бросков" ЛА, которыми сопровождаются известные способы с использование нескольких излучателей света при переходе с одного участка посадочной траектории на другой, что, соответственно, повышает безопасность полетов ЛА.
Следует также отметить, что обеспечение возможности наблюдения летчиком всех трех участков посадочной траектории до касания колес ЛА твердой поверхности посадочной полосы позволяет контролировать процесс прохождения посадки по указанной траектории вручную. Возможно и обеспечение проведения посадки ЛА согласно предлагаемому способу и в автоматическом режиме, однако для этого ЛА должен быть оснащен соответствующими средствами, аналогичными известным средствам, применяемым в настоящее время для обеспечения автоматического режима посадки ЛА, осуществляемым с использованием посадочных траекторий, формируемым по известным способам.
Предлагаемый способ может использоваться на аэродромах как автономно, так и совместно с другими известными способами, например, радиотехническими, микроволновыми и др. Автономное его использование целесообразно на необорудованных и слабо оборудованных аэродромах, а также на аэродромах малой авиации. Совместное же его использование обеспечивает летчика дополнительной информацией о положении в пространстве оптимальной посадочной траектории, т.е. дополняя известный способ, например, радиотехнический, в недоступных для него зонах, например, когда снижение по радиотехнической глиссаде осуществляется только до высоты 60 метров, а далее - в ручном режиме без всякой внешней информации. Такой информацией позволяет обеспечивать летчика предлагаемый способ. Так, при снижении до высоты 60 метров летчик использует информацию от известных радиотехнических посадочных средств (например, ILS - Instrumental Landing System), а начиная с высоты 60 метров и до касания ЛА поверхности ВПП использует информацию от излучателя света согласно предлагаемому способу. Такое совместное использование предлагаемого способа с известными, с одной стороны, повышает безопасность выполнения посадки ЛА, а с другой стороны, позволяет повысить категорию аэродрома.
Таким образом, изобретение охарактеризованное совокупностью признаков, каждый из которых выполняет свою функцию, обеспечивает технический результат, заключающийся в повышении безопасности посадки, в том числе в условиях недостаточной видимости или недостаточной освещенности ВПП, при недостаточном количестве визуальных ориентиров в районе ВПП, в сложных метеоусловиях, а также в случаях, когда необходимо осуществлять высокоточное приземление ЛА в заданной точке, например, на аэродромах с короткими ВПП, при наличии объектов в зоне захода на посадку, при наличии сложного рельефа в зоне аэродрома.
| название | год | авторы | номер документа |
|---|---|---|---|
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| СИСТЕМА ВИЗУАЛЬНОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) | 2012 |
|
RU2522766C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2012 |
|
RU2494018C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛА В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2601511C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2013 |
|
RU2547157C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| ВИЗУАЛЬНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НЕОБОРУДОВАННЫЕ АЭРОДРОМЫ В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ | 2021 |
|
RU2781651C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
Изобретение относится к области авиационной техники, в частности к светотехническим средствам обеспечения посадки летательных аппаратов. Способ включает использование одного излучателя света для формирования трех участков посадочной траектории, при этом на начальном этапе посадки формируют участок траектории пробивания облачности, для этого излучатель света разворачивают относительно плоскости горизонта так, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для текущих метеоусловий углу пробивания облачности θпр и фиксируют излучатель света в этом положении. Далее формируют глиссадный участок посадочной траектории, для этого излучатель света поворачивают так, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для данного типа летательного аппарата углу наклона глиссады θгл и фиксируют излучатель в этом положении, затем определяют высоту начала выравнивания и начинают изменять угловую ориентацию светового пучка излучателя относительно плоскости горизонта таким образом, чтобы угол отклонения светового пучка излучателя от плоскости горизонта совпадал с углом наклона выбранной траектории участка выравнивания. Технический результат заключается в повышении безопасности посадки летательных аппаратов. 3 з.п. ф-лы, 3 ил., 1 табл.
1. Способ формирования оптической посадочной траектории летательного аппарата, включающий использование одного излучателя света для формирования трех участков посадочной траектории, соответствующих трем этапам посадки летательного аппарата, при этом на начальном этапе посадки формируют участок траектории пробивания облачности, для этого излучатель света разворачивают относительно плоскости горизонта таким образом, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для текущих метеоусловий углу пробивания облачности θпр, и фиксируют излучатель света в этом положении, при достижении летательным аппаратом высоты, соответствующей нижнему краю облачности, формируют глиссадный участок посадочной траектории, для этого излучатель света поворачивают таким образом, чтобы угол отклонения его светового пучка от плоскости горизонта был равен требуемому для данного типа летательного аппарата углу наклона глиссады θгл, и фиксируют излучатель в этом положении, затем в зависимости от текущих метеоусловий в районе аэродрома выбирают тип участка выравнивания посадочной траектории, в зависимости от типа летательного аппарата определяют высоту начала выравнивания, и в момент достижения летательным аппаратом определенной высоты выравнивая начинают изменять угловую ориентацию светового пучка излучателя относительно плоскости горизонта таким образом, чтобы угол отклонения светового пучка излучателя от плоскости горизонта в каждый выбранный момент времени совпадал с углом наклона выбранной траектории участка выравнивания.
2. Способ формирования оптической посадочной траектории летательного аппарата по п.1, отличающийся тем, что излучатель света размещают в точке, находящейся на заданном расстоянии от торца взлетно-посадочной полосы и на заданном расстоянии от продольной оси взлетно-посадочной полосы, при этом угол между продольной осью взлетно-посадочной полосы и осью диаграммы направленности излучателя света в горизонтальной плоскости определяется в зависимости от ширины диаграммы направленности излучателя света и равен ее половине.
3. Способ формирования оптической посадочной траектории летательного аппарата по п.1, отличающийся тем, что излучатель света размещают стационарно или с возможностью перемещения на транспортном средстве.
4. Способ формирования оптической посадочной траектории летательного аппарата по п.1, отличающийся тем, что излучатель света представляет собой источник лазерного излучения.
| WO 2010020751 A2, 25.02.2010 | |||
| US 3279406 A, 18.10.1966 | |||
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2007 |
|
RU2369532C2 |
| СПОСОБ ОРИЕНТИРОВАНИЯ В ПРОСТРАНСТВЕ ДВИЖУЩЕГОСЯ ТРАНСПОРТА ПО СВЕТОВОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322371C2 |

