Изобретение относится к области оптики и может быть использовано для визуальной посадки летательных аппаратов (ЛА) в сложных метеорологических условиях (СМУ) и ночью на необорудованные аэродромы.
В экстренных ситуациях при невозможности посадки на аэродромы, оборудованные радиотехническими и оптическими системами посадки, возникает необходимость садиться на запасные аэродромы, на которых этих дорогостоящих систем нет. В условиях хорошей видимости пилот может осуществить посадку на такие аэродромы. Но в сложных метеоусловиях при плохой видимости ориентиров и взлетно-посадочной полосы (ВПП) визуальная посадка становится проблематичной, даже при том условии, что система навигации ЛА вывела его на аэродром, а высота ЛА, измеряемая его высотомерами, известна.
Сложность визуальной посадки заключается в том, что пилот не знает, в какой момент он должен увидеть Землю, и сколько времени у него остается на принятие решения: садиться или уходить на второй круг.
Для построения посадочной глиссады в СМУ необходимо:
1. Наличие на аэродроме модулированных оптических маяков, обеспечивающих построение глиссады посадки в отсутствие видимости ВПП.
2. Наличие оперативной информации о дальности до ВПП, а также о наклонной метеорологической дальности видимости.
Известна «Система посадки летательных аппаратов», патент RU 2386176 С2, опубликован 10.04.2010 Бюл. №10 - аналог. По бокам ВПП размещаются радиомаяки, а на борту ЛА устанавливают инерциальную систему навигации, бортовой приемник, блок дальности, измеритель высоты, блок обработки, траекторный блок и систему управления. Эта радиотехничеекая система обеспечивает повышение точности и безопасности посадки в СМУ.
Недостатком аналога является сложность и высокая стоимость системы, и такой аэродром нельзя считать необорудованным.
Визуальная посадка ночью и в СМУ осуществляется с использованием специальной системы огней высокой интенсивности (оптических маяков), Аронов О.Н., Ломанцов Б.Н. «Светотехническое оборудование аэродромов», Ульяновск, УВЛГУ ГА, 2002, 105 с. - прототип.
Система также очень сложная, дорогая и энергозатратная, т.к. в среднем состоит из 16 огней приближения, 60 посадочных огней, 12 входных ограничительных огней, шести огней знаков приземления и четырех глиссадных огней. Аэродром, оборудованный такой системой посадки, также нельзя считать необорудованным.
Технический результат изобретения - упрощение и снижение стоимости системы визуальной посадки на необорудованных аэродромах ночью и в сложных метеорологических условиях.
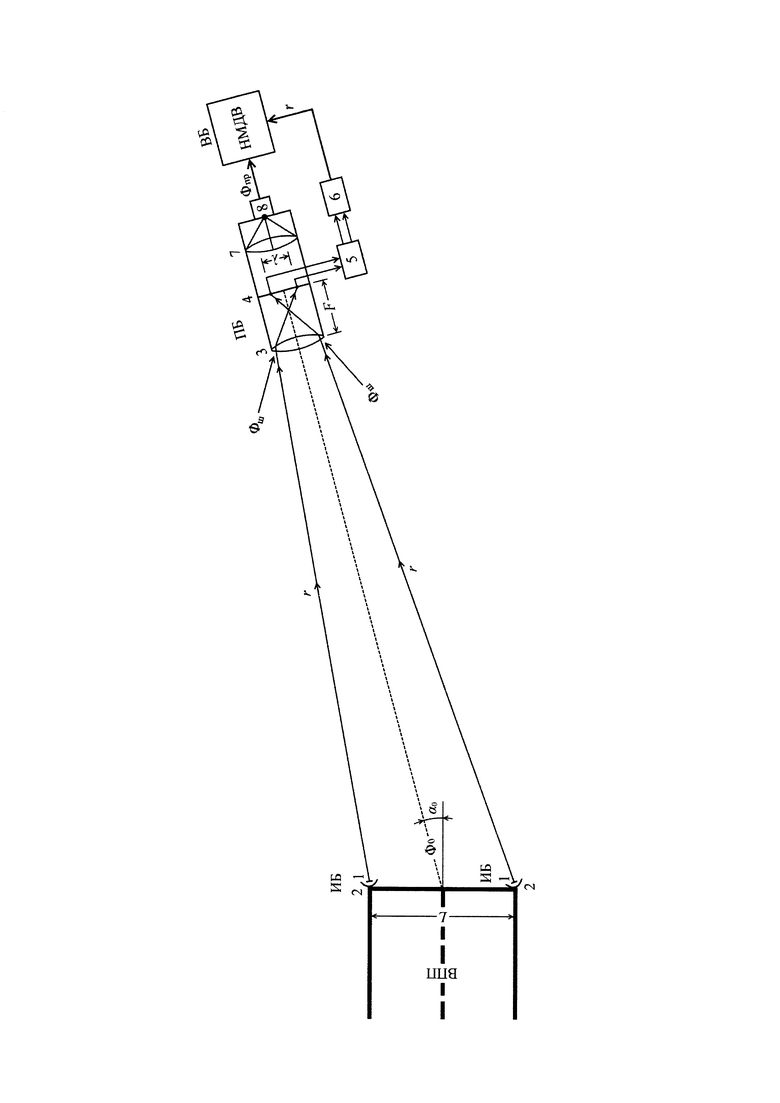
Принципиальная схема системы для визуальной посадки ЛА ночью и в СМУ приведена на чертеже.
Система визуальной посадки содержит:
1. Излучательный блок (ИБ), включающий два прожектора, излучающих световые импульсы пачками с некоторой частотой, например 3 Гц, расположенных на расстоянии L друг от друга на краях ВПП перпендикулярно ее оси. Прожектор включает в себя источники видимого света 1, расположенные в фокальной плоскости объектива (зеркала) 2, создающего коллимированный пучок света. Направление пучков света под углом α0 к горизонту определяет глиссаду снижения летательного аппарата. Расположен на аэродроме.
2. Приемный блок (ПБ), стабилизированный под углом α0 к горизонту, включает в себя канал наведения и измерительный канал, которые совмещены по оптической оси. Расположен на борту ЛА.
Канал наведения выполнен в виде широкоугольного объектива 3, фокусирующего коллимированное излучение прожекторов в виде двух точек на матрице 4 цифрового фотоаппарата, расположенной в фокальной плоскости объектива фотоаппарата. На экран фотоаппарата нанесен прицел в виде перекрестья, относительно которого пилот добивается такого расположения точек, чтобы они размещались на горизонтальной линии прицела. В этом случае ЛА выдерживает глиссаду снижения по тангажу (углу α). Две точки, соответствующие изображениям прожекторов, должны размещаться симметрично относительно вертикальной линии прицела. В этом случае пилот выдерживает глиссаду посадки по азимуту относительно оси ВПП.
Измерительный канал содержит селективный усилитель 5, вычислитель 6, фокусирующий объектив 7, а также фотодетектор 8. Сигнал, снятый с матрицы, усиливается селективным усилителем и подается на вычислитель, который по измеренному расстоянию λ между изображениями двух точек на матрице вычисляет расстояние до взлетно-посадочной полосы по формуле

где F - фокусное расстояние объектива фотоаппарата. Снижение по глиссаде может осуществляться автоматически по равносигнальной зоне [В.А. Шпенст Радиолокационные системы и комплексы: учебник. СПб.: Санкт-Петербургский горный университет, 2016, с. 188-189] сигнала по четырем квадрантам матрицы. Когда снижение происходит по глиссаде, сигналы этих квадрантов равны между собой.
Объектив 7 фокусирует излучение с экрана фотоаппарата на фотодетекторе 8, измеряющем интенсивность шума атмосферы Фш, когда прожектора еще не включены, и интенсивность сигнала приемника Фпр, состоящую из суммы двух сигналов Ф+Фш, где Ф - интенсивность излучения каждого прожектора, ослабленная слоем атмосферы толщиной r. Интенсивность сигналов прожекторов Ф0 измеряется на Земле.
3. Измеренные величины Ф0, Фпр, Фш и r оперативно подаются в вычислительный блок (ВБ), и по модернизированной формуле Кошмидера вычисляется наклонная метеорологическая дальность видимости (НМДВ) [И.Я. Рацимор. Наклонная видимость. Л.: Гидрометеоиздат, 1987, с. 6-8, 82-84; 67-71].
Система визуальной посадки работает следующим образом.
1. На земле измеряется интенсивность модулированного излучения прожекторов Ф0 и запоминается в вычислительном блоке. Модуляция сигнала необходима для исключения ложного обнаружения посторонних огней в СМУ. Излучение прожекторов направляется под фиксированным глиссадным углом α0 к горизонту.
2. Навигационная система выводит ЛА на запасной аэродром.
3. На расстоянии порядка 5 км до аэродрома измеряется шум атмосферы Фш, и эта величина запоминается в вычислительном блоке. После чего подается сигнал на включение посадочных прожекторов.
4. Приемный блок сканирует область посадки по посадочному углу α и азимутальному углу β относительно оси ВПП. После симметричного расположения изображений двух прожекторов относительно прицела (равносигнальная зона) начинается снижение ЛА по глиссаде. В это время измеряется ослабленный слоем атмосферы сигнал Фпр и расстояние r до ВПП. По сигналам Ф0, Фпр, Фш и r вычисляется НМДВ.
5. Пилот продолжает снижение по глиссаде в облачности, каждую секунду получая информацию о высоте ЛА, дальности до ВПП и наклонной МДВ.
6. При условии r=НМДВ пилот должен увидеть ВПП и осуществить визуальную посадку. В противном случае он должен уходить на второй круг.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НЕОБОРУДОВАННЫЕ АЭРОДРОМЫ | 2008 |
|
RU2375263C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКОЙ ДАЛЬНОСТИ ВИДИМОСТИ В СЛОЖНЫХ МЕТЕОУСЛОВИЯХ | 2021 |
|
RU2780672C1 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| ВИЗУАЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДВИЖУЩИМСЯ НАБЛЮДАТЕЛЕМ | 2006 |
|
RU2326348C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2012 |
|
RU2494018C1 |
| ЛАЗЕРНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ЛА) НА МАЛОРАЗМЕРНЫЕ ВЗЛЕТНО-ПОСАДОЧНЫЕ ПЛОЩАДКИ (ВПП) | 2013 |
|
RU2547157C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2397115C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ | 2003 |
|
RU2234440C1 |
Изобретение относится к области оптики и касается визуальной системы посадки летательных аппаратов на необорудованные аэродромы в сложных метеорологических условиях. Система содержит навигационную систему, высотомер и систему визуальной посадки. Система визуальной посадки включает в себя расположенный на аэродроме излучательный блок и расположенные на летательном аппарате приемный блок, включающий в себя канал наведения и измерительный канал, а также вычислительный блок. Излучательный блок выполнен в виде двух прожекторов, расположенных на краях взлетно-посадочной полосы и излучающих модулированный видимый свет. Канал наведения выполнен в виде цифрового фотоаппарата, фокусирующего излучение прожекторов в виде двух точек на матрице, визуализированных на экране фотоаппарата, на котором в виде перекрестья нанесен прицел. Измерительный канал содержит селективный усилитель и устройство измерения дальности до взлетно-посадочной полосы. Технический результат заключается в упрощении визуальной системы посадки. 1 ил.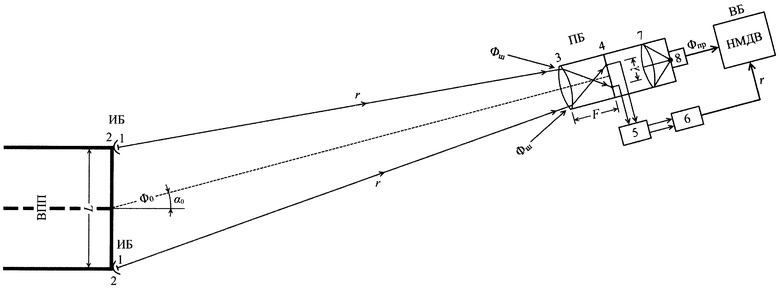
Визуальная система посадки летательных аппаратов на необорудованные аэродромы в сложных метеорологических условиях, содержащая: навигационную систему, высотомер и систему визуальной посадки, включающую в себя излучательный блок, расположенный на аэродроме; приемный блок, включающий в себя канал наведения и измерительный канал, а также вычислительный блок, которые расположены на летательном аппарате, отличающаяся тем, что излучательный блок выполнен в виде двух прожекторов, расположенных на краях взлетно-посадочной полосы на расстоянии L друг от друга, излучающих модулированный видимый свет с интенсивностью Ф0; канал наведения выполнен в виде цифрового фотоаппарата, фокусирующего излучение прожекторов в виде двух точек на матрице, визуализированных на экране фотоаппарата, на котором в виде перекрестья нанесен прицел; измерительный канал содержит селективный усилитель и устройство измерения дальности до взлетно-посадочной полосы, вычисляемой по формуле:
где F - фокусное расстояние объектива фотоаппарата, а λ - измеренное расстояние между изображениями двух точек на матрице, а также фокусирующий объектив и фотодетектор, измеряющие интенсивность шума атмосферы Фш и интенсивность излучения приемника Фпр, ослабленного слоем атмосферы толщиной r, величина Ф0 измеряется на Земле, а наклонная дальность видимости вычисляется по формуле:
и при r≤НМДВ осуществляется визуальная посадка.
| RU 94011515 A1, 27.09.1996 | |||
| US 8000867 B2, 16.08.2011 | |||
| US 9260180 B2, 16.02.2016 | |||
| Состав сварочной проволоки | 1978 |
|
SU776825A1 |

