Настоящее изобретение относится к средствам для определения местоположения объектов в пространстве с использованием переизлучения оптических волн и может быть использовано для ориентирования самолетов при посадке или для проведения судов в прибрежных зонах.
Известен способ ориентирования воздушного и водного транспорта по пучку светового излучения, по которому в пространство навстречу движущемуся транспорту с помощью лазера посылают остронаправленные пучки оптического излучения красного и зеленого цветов. Указанные пучки излучения построчно перемещают в заданных зонах ориентирования таким образом, чтобы каждый из этих пучков перекрывал свою зону ориентирования полностью (см. В.Е.Зуев, В.Я.Фадеев, Лазерные навигационные системы. Москва, 1987 г., с.153-155).
Этот способ обеспечивает визуальное восприятие световых сигналов на значительном удалении от их источника. Однако он не дает возможности ориентироваться транспортному средству внутри зоны, в которой перемещается световой пучок, т.к. внутри этой зоны пучок не меняет своих характеристик, а определить положение этого пучка в каждый заданный момент времени визуально не представляется возможным. Все это значительно снижает точность ориентирования в целом.
Наиболее близким является способ ориентирования воздушного и водного транспорта по пучку светового излучения "Глиссада" (см. В.Е.Зуев, В.Я.Фадеев, Лазерные навигационные системы. Москва, 1987 г., с.89-90). По этому способу из близко расположенных друг к другу источников в заданную зону пространства посылают, по меньшей мере, три световых пучка. В качестве источников световых пучков можно использовать либо лазеры либо прожекторы. Указанные световые пучки посылают в заданную зону пространства таким образом, чтобы два из них расходились в стороны друг от друга под углом, не превышающим 90 градусов. При этом третий световой пучок посылают в заданную зону пространства по биссектрисе угла между расходящимися в стороны световыми пучками. На движущемся транспорте - корабле или самолете - наблюдают все эти световые пучки со стороны их боковой поверхности, а движущийся транспорт ориентируют таким образом, чтобы наблюдаемые световые пучки образовывали симметричную фигуру.
Данный способ не применим в сильнозамутненной атмосфере - сильные туман, снег, или дождь. В этом случае световые пучки не будут восприниматься визуально как пучки с достаточно резко очерченной направленностью. Они будут восприниматься в лучшем случае как овальные световые зоны, перекрывающие друг друга и не позволяющие определить симметричность образуемой ими фигуры. При очень сильном замутнении атмосферы все три пучка будут сливаться в одно световое пятно. Но даже в достаточно хороших погодных условиях наблюдателю, особенно пилоту, сложно установить момент, когда образуемая световыми пучками фигура будет симметричной. Это обусловлено тем, что наблюдатель находится на достаточно далеком расстоянии от светового пучка и визуально ему сложно спроектировать световой пучок в ту же плоскость, в которой находится он сам. Здесь все будет зависеть от тренированности наблюдателя в восприятии этой световой фигуры, от его психического состояния и других субъективных факторов. При этом сложность оценки симметричности образованной световыми пучками фигуры будет возрастать по мере приближения движущегося транспортного средства к источникам этих световых пучков. Кроме того, находящийся на движущемся воздушном или водном транспорте наблюдатель не может определить, на каком расстоянии от наблюдаемых световых пучков оно находится, и местоположение транспорта он определяет только качественно, устанавливая всего лишь верное направления движения этого транспорта. Все это сильно снижает возможности и точность ориентирования, особенно в сложных условиях видимости.
Задачей заявляемого способа является значительное повышение точности и возможностей ориентирования движущегося транспорта при сохранении высокой наглядности и простоты ориентирования. При этом другой задачей будет являться возможность оперативного определения расстояния от наблюдателя до светового пучка.
Поставленная задача решается тем, что как и в известном, в предлагаемом способе ориентирования движущегося объекта в пространстве по световому лучу в заданную зону пространства в определенном направлении посылают световой пучок, на движущемся транспорте принимают излучение, идущее от боковых сторон этого пучка, и по этому излучению определяют положение этого пучка в пространстве, после чего ориентируют движение транспорта относительно положения в пространстве этого светового пучка.
В отличие от известного в данном способе на движущемся транспорте излучение, идущее от боковых сторон светового пучка, принимают с помощью первой оптической системы и с помощью этой же оптической системы это излучение посылают на фоточувствительный экран, выполненный в виде фотоприемной матрицы и установленный на движущемся транспорте, и формируют на этом фоточувствительном экране оптическую проекцию светового пучка; возникшие от воздействия сформированной на фоточувствительном экране оптической проекции светового пучка электрические сигналы посылают на персональную ЭВМ, с помощью которой затем формируют на видеоэкране изображение светового пучка; на этом же видеоэкране показывают направление движения данного транспорта и в дальнейшем ориентируют движение этого транспорта по показанному на этом же видеоэкране взаимному расположению изображения светового пучка и направлению движения указанного транспорта.
Излучение, идущее от боковых сторон светового пучка, одновременно с первой оптической системой целесообразно принимать так же и с помощью второй оптической системы, расположенной от первой оптической системы на расстоянии не меньше, чем на 0,5 метра; с помощью второй оптической системы указанное излучение посылают на второй фоточувствительный экран, также выполненный в виде фотоприемной матрицы и установленный на движущемся транспорте; на втором фоточувствительном экране также формируют оптическую проекцию светового пучка, возникшие при этом электрические сигналы посылают на ту же персональную ЭВМ, на которую посылают электрические сигналы, идущие от первого фоточувствительного экрана; определяют направление оптической оси каждой из фотоприемных систем в момент получения изображения проекции светового пучка и угол наклона этой оптической оси каждой из фотоприемных систем к заданной плоскости, проходящей через вторые главные точки обеих фотоприемных систем, и по этим углам наклона, а так же по расстоянию между вторыми главными точками обеих фотоприемных систем и по положению изображения проекции светового пучка на фоточувствительном экране определяют расстояние до светового пучка и характеристики положения его в пространстве.
При ориентировании по данному способу световой пучок целесообразно посылать в виде импульсов. В этом случае дальность приема излучения от светового пучка будет гораздо выше.
В настоящее время не известны способы ориентирования по световому пучку, в которых световой пучок и направление движения ориентирующегося объекта проецируют в одну и ту же плоскость. Все известные способы предусматривают наблюдение светового пучка из другой плоскости (из плоскости движения ориентирующегося объекта) с дальнейшим умозрительным сопоставлением расположения этого пучка с направлением движения объекта.
Способ может быть реализован следующим образом. Рассмотрим, например, как он осуществляется для самолета.
У начала взлетно-посадочной полосы устанавливают источник коллимированного излучения видимого диапазона спектра, например лазер, и направляют генерируемый этим источником световой пучок по глиссаде снижения самолета. На самолете устанавливают оптическую систему приема оптического излучения с большой глубиной резкости, например объектив, установленный на гиперфокальном расстоянии, и направляют эту систему вниз. При подлете к взлетно-посадочной полосе оптическая система принимает оптическое излучение, идущее от боковых сторон светового пучка, и проецирует ее на экран, который установлен также на самолете против выходного зрачка оптической системы. Поскольку экран находится на самолете и закреплен неподвижно, то на него можно нанести линию, которая будет совпадать с направлением движения самолета. При этом, если самолет будет находиться в стороне от посылаемого со взлетно-посадочной полосы светового пучка и направление его движения не будет совпадать с направлением светового пучка, то на экране проекция этого светового пучка также будет находиться в стороне от направления движения самолета, показанного на экране, и пилоту останется только изменить направление движения самолета таким образом, чтобы оно совпало с направлением светового пучка.
Однако ориентироваться непосредственно по изображению светового пучка на экране представляется довольно неудобным, т.к., во-первых, установка экрана на самолете должна быть выполнена таким образом, чтобы он хорошо просматривался визуально, что сопряжено со значительными трудностями, и, во-вторых, непосредственное наблюдение проекции светового пучка на экране значительно снижает дальность восприятия светового пучка, а значит, снижает дальность ориентирования. Поэтому целесообразно преобразовать проекцию светового пучка на экране в определенную последовательность электрических сигналов и передать последовательность этих сигналов через компьютер на экран монитора. Для преобразования получаемой на экране проекции светового пучка в последовательность электрических сигналов в качестве экрана можно использовать фотоприемную матрицу. Тогда при проецировании пучка создаваемое на таком экране изображение светового пучка будет преобразовываться в последовательность электрических сигналов, которые можно передать через компьютер на экран монитора. В этом случае на экране монитора, который может быть установлен в удобном для наблюдения месте, будет воспроизводиться проекция светового пучка и направление движения самолета. Далее ориентирование будет осуществляться так же, как описано выше, т.е. пилот изменяет направление движения самолета таким образом, чтобы на экране монитора изображение этого направления совпало с направлением светового пучка. При этом возможности ориентирования значительно расширятся, т.к. метод статистической обработки сигнала делает чувствительность фотоприемной матрицы несравненно более высокой, чем чувствительность глаза. Это значит, что с хорошей точностью и надежностью ориентирование можно будет осуществлять в условиях очень слабой видимости. При этом световой пучок может быть импульсным, в этом случае возможности ориентирования в условиях плохой видимости еще больше расширятся, т.к. появляется возможность исключить световые помехи и тем самым увеличить чувствительность приема светового излучения, идущего от светового пучка.
Излучение, идущее от светового пучка, можно принимать на две фотоприемные системы, установленные на самолете. При этом указанные фотоприемные системы должны быть разнесены друг от друга, по меньшей мере, на 0,5 метра. Каждая из фотоприемных систем проецирует изображение светового пучка на свой экран, который выполнен, например, в виде фотоприемной матрицы. Изображения, проецируемые на каждую фотоприемную матрицу, можно также передавать через компьютер на экран монитора, тогда на экране монитора будет видно два разнесенных изображения светового пучка, ориентирование можно будет производить по расположению изображений обоих световых пучков.
Принимая излучение от светового пучка на две фотоприемные системы, разнесенные друг от друга на заданное расстояние, можно в то же время определить положение светового пучка в прямоугольной системе координат XYZ, связанной с плоскостью, проходящей через вторые главные точки объективов фотоприемных систем. Определение положения оптических осей фотоприемных систем относительно этой заданной плоскости предполагает возможность определения координат направляющих векторов прямых линий, совпадающих с этими оптическими осями.
Возьмем прямоугольную систему координат XYZ так, что плоскость XOY совпадает с заданной плоскостью, проходящей через вторые главные точки объективов. Поскольку положение экрана в системе координат XYZ также определено, то могут быть определены в этой системе координат также координаты точек изображения светового пучка на экране и координаты точек пересечения оптических осей с плоскостью экрана.
Пусть в системе координат XYZ вторая главная точка объектива первой фотоприемной системы имеет координаты (X1, 0, 0), а направляющий вектор ее оптической оси имеет координаты {a1, b1, с1}, где а1, b1, с1 - координаты направляющего вектора по осям X, Y, Z соответственно. Пусть также в этой в второй системе координат XYZ вторая главная точка объектива второй фотоприемной системы имеет координаты (0, Y2, 0), а направляющий вектор ее оптической оси имеет координаты {а2, b2, c2}, где а2, b2, c2 - координаты направляющего вектора по осям X, Y, Z соответственно.
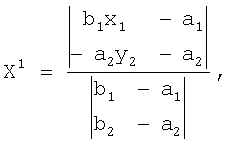
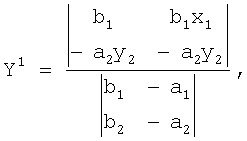
Когда оптическая ось фотоприемных систем проходит через свои изображения светового пучка и выполняется условие
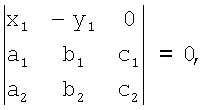
то координаты (х1, у1, z1) точки пересечения оптическими осями светового пучка определяются формулами
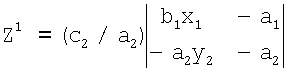
Аналогично можно найти координаты (х11, y11, z11) другой точки, лежащей на световом пучке, изменив положение оптических осей фотоприемных систем относительно заданной плоскости. Эти две точки полностью определяют положение светового пучка системе координат XYZ.
Реализацию данного способа можно осуществить с помощью специально разработанного устройства, которое относится к средствам для определения местоположения объектов в пространстве с использованием переизлучения оптических волн, и может быть использовано для ориентирования самолетов при посадке или для проведения судов в прибрежных зонах.
Ближайшим из известных является устройство для ориентирования по световому лучу, описанное в Авторском свидетельстве СССР №1155067, МКИ G01S 7/48, с приоритетом от 17.02.83 г. Данное устройство включает, по меньшей мере, три фотоприемных блока, три блока обработки и ЭВМ, причем каждый из блоков обработки подключен через устройство "ввода-вывода" к указанной ЭВМ. Каждый из фотоприемных блоков содержит объектив, фотоприемную матрицу, блок формирования номера ячейки фотоприемной матрицы, пороговое устройство, дифференциальный усилитель, блок формирования фаз и матрицу памяти, причем фотоприемная матрица соединена с одним из входов матрицы памяти, второй вход которой подключен к одному из выходов блока формирования фаз, а другой выход этого блока формирования фаз подключен к фотоприемной матрице. Третий выход блока формирования фаз подключен к одному из входов блока формирования номера ячейки фотоприемной матрицы, а выход этого блока формирования номера ячейки фотоприемной матрицы подключен к введенному в состав устройства блоку синхронизации. Выход же матрицы памяти подключен к одному из входов дифференциального усилителя, другой вход которого подключен к выходу фотоприемной матрицы, а выход этого дифференциального усилителя подключен ко входу порогового устройства. Выход же порогового устройства подключен к другому входу блока формирования номера ячейки фотоприемной матрицы, выход которого, в свою очередь, подключен к ЭВМ.
Данное устройство обладает существенными ограничениями по надежности и по точности. Объясняется это тем, то оно получает изображение светового пучка вследствие обсчета проекций, получаемых с помощью трех объективов на трех фотоприемных матрицах. В этом случае измерения координат проекций светового пучка должны строго синхронизоваться между собой, а ошибки в результате рассинохронизации этих измерений приводят и к ошибкам в получении изображения, причем ошибки эти будут возрастать по мере приближения этого устройства, а значит, самого транспортного средства к световому пучку. Кроме того, каждый из измерительных блоков будет вносить свои ошибки, обусловленные уже конструкцией этих блоков, в математических расчетах линии пересечения плоскостей тоже будут присутствовать свои ошибки, и все указанные ошибки будут складываться. К этому следует добавить, что наличие трех блоков обработки и трех фотоприемных систем существенно снижает и надежность работы всего устройства в целом. Кроме того, данное устройство является сложным по конструкции, т.к. должно содержать не менее трех фотоприемных блоков и не менее трех блоков обработки.
Задачей изобретения является повышение точности и надежности ориентирования при одновременном упрощении конструкции устройства.
Поставленная задача решается тем, что, как известное, данное устройство содержит компьютер, блок синхронизации и схему регистрации светового пучка, в состав которой входят объектив, фотоприемная матрица, матрица памяти, дифференциальный усилитель, блок формирования номера ячейки, пороговое устройство, причем содержащийся в схеме регистрации светового пучка объектив оптически связан с указанной фотоприемной матрицей, выход этой фотоприемной матрицы электрически связан со входом указанной матрицы памяти и параллельно с одним из входов дифференциального усилителя указанной схемы регистрации светового пучка; выход же дифференциального усилителя электрически связан со входом указанного порогового устройства, выход которого электрически связан со входом указанного блока формирования номера ячейки фотоприемной матрицы, а выход этого блока формирования номера ячейки электрически связан с портом компьютера.
В отличие от известного в данном изобретении установлен монитор, а в схему регистрации светового пучка введен контроллер фотоприемной матрицы, при этом указанный монитор своим входом электрически связан с выходом компьютера, блок синхронизации своим выходом электрически связан со свободным портом компьютера, а контроллер фотоприемной матрицы своим входом электрически связан с другим свободным портом компьютера, причем одним своим выходом этот же контроллер электрически связан со входом самой фотоприемной матрицы, а другим своим выходом - с матрицей памяти.
В данном устройстве впервые сформирована такая схема соединения фотоприемной матрицы с компьютером, которая обеспечивает получение на экране монитора изображения проекции светового пучка, формируемого объективом непосредственно на фотоприемной матрице, исключая при этом проведение каких-либо математических расчетов.
Для обеспечения возможностей ориентирования по непрерывному световому пучку в данном устройстве могут быть установлены инвертор и электрический переключатель, при этом инвертор своим входом электрически связан с выходом фотоприемной матрицы, а своим выходом через электрический переключатель так же электрически связан с инверсным входом дифференциального усилителя, причем электрический переключатель установлен таким образом, чтобы он мог осуществлять переключение выхода фотоприемной матрицы на инверсный вход дифференциального усилителя либо через инвертор, либо минуя инвертор.
Для повышения точности и увеличения дальности ориентирования в данном устройстве объектив, содержащийся в схеме регистрации светового пучка, выполнен с возможностью поворота вокруг двух взаимно ортогональных осей, в самой схеме регистрации светового пучка установлены два управляемых привода, два датчика угла поворота и контроллер приводов, причем каждый из управляемых приводов механически связан с указанным объективом и таким образом, чтобы он обеспечивал поворот этого объектива только вокруг своей оси; своим управляющим входом каждый из указанных приводов электрически связан с управляющими выходами контроллера приводов, а сам контроллер приводов своим входом электрически связан со своим портом компьютера; указанные же датчики угла поворота механически связаны с осями вращения своих управляемых приводов, а своими выходами они также электрически связаны со своими портами этого же компьютера.
Для определения расстояния до светового пучка в данном устройстве выполнена вторая такая же схема регистрации светового пучка; при этом управляющие входы управляемых приводов, содержащихся во второй схеме регистрации светового пучка, электрически связаны через свои контроллеры приводов с управляющим портом компьютера; выходы датчиков угла поворота второй схемы регистрации светового пучка электрически связаны со своими портами этого же компьютера.
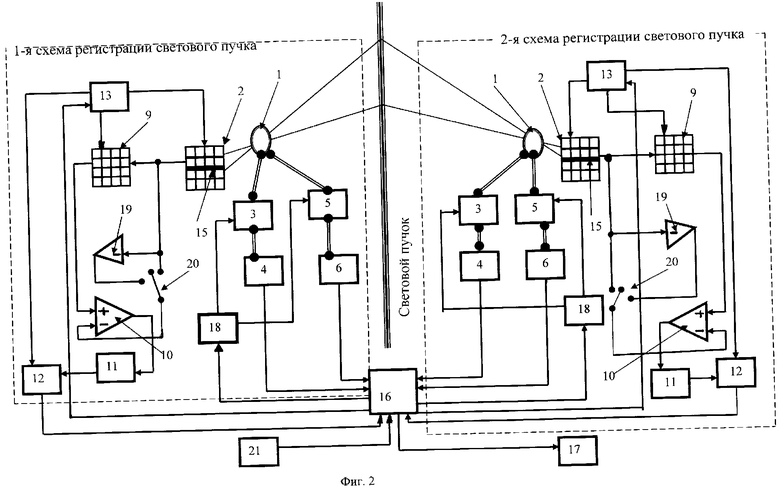
На фиг.1 показана схема устройства с одной схемой регистрации светового пучка, в которой выполнены управляемые приводы и датчики угла поворота.
На фиг.2 показана схема устройства с двумя, в каждой из которых выполнены управляемые приводы и датчики угла поворота.
Устройство содержит:
- объектив - 1, в обеих схемах регистрации светового пучка;
- фотоприемную матрицу - 2, в обеих схемах регистрации светового пучка;
- приводы - 3 и 5, в обеих схемах регистрации светового пучка;
- датчики угла поворота - 4 и 6, в обеих схемах регистрации светового пучка;
- матрицу памяти - 9, в обеих схемах регистрации светового пучка; можно использовать, например, матрицу, применяемую в цифровых фотоаппаратах;
- дифференциальный усилитель - 10, в обеих схемах регистрации светового пучка; можно использовать, например, усилитель 140УД14;
- пороговое устройство - 11, в обеих схемах регистрации светового пучка; можно использовать, например, устройство 554СА1;
- блок формирования номера ячейки фотоприемной матрицы - 12, в обеих схемах регистрации светового пучка; можно использовать, например, устройство 155ИЕ2;
- контроллер фотоприемной матрицы - 13, в обеих схемах регистрации светового пучка; можно использовать любой контроллер, обеспечивающий вывод сигнала с фотоприемной матрицы;
- компьютер - 16;
- монитор - 17;
- контроллер приводов - 18, в обеих схемах регистрации светового пучка; можно использовать любой контроллер, обеспечивающий плавное регулирование угла поворота привода;
- инвертор - 19, в обеих схемах регистрации светового пучка; можно использовать, например, операционный усилитель 140УД14;
- электрический переключатель - 20;
- блок синхронизации 21.
Кроме того, на фиг.1 и 2 на фотоприемной матрице 2 показано изображение проекции 15 светового пучка, а так же сам световой пучок.
При этом объектив 1 оптически связан с фотоприемной матрицей 2, на которой показано изображение проекции 15 светового пучка. Фотоприемная матрица 2 своим выходом электрически связана со входом матрицы памяти 9 и параллельно через электрический переключатель 20 с инверсным входом дифференциального усилителя 10, прямой вход которого электрически связан с выходом матрицы памяти 9. Выход же дифференциального усилителя 10 электрически связан со входом порогового устройства 11. Пороговое устройство 11, в свою очередь, своим выходом электрически связано со входом блока 12 формирования номера ячейки фотоприемной матрицы, а другой выход этого блока 12 формирования номера ячейки фотоприемной матрицы 2 электрически связан с одним из портов компьютера 16. Другой порт компьютера 16 электрически связан со входом контроллера 13 фотоприемной матрицы 2. Один из выходов контроллера 13 фотоприемной матрицы 2 электрически связан со входом самой фотоприемной матрицы 2, а другой выход этого контроллера 13 электрически связан со свободным входом матрицы памяти 9. Инвертор 19 своим входом электрически связан с выходом фотоприемной матрицы 2, а своим выходом через электрический переключатель 20 электрически связан с инверсным входом дифференциального усилителя 10. Установленный в устройстве блок синхронизации 21 своим выходом электрически связан с одним из портов компьютера 16 и представляет собой радиоприемное устройство, обеспечивающее прием радиосигналов, обозначающих момент генерации каждого импульса излучения светового пучка в случае, если для ориентирования движущегося транспорта используется импульсное излучение. Для светового пучка непрерывного излучения блок синхронизации 21 не используется.
Установленный в схеме регистрации светового пучка объектив 1 выполнен с возможностью его поворота вокруг двух ортогональных осей, а приводы 3 и 5 механически связаны с этим объективом 1 и таким образом, чтобы они обеспечивали поворот объектива вокруг указанных осей. При этом приводы 3 и 5 выполнены управляемыми, а их управляющие входы электрически связаны через контроллер приводов 18 с портом компьютера 16. Кроме того оси вращения приводов 3 и 5 механически связаны с датчиками угла поворота 4 и 6 - каждый привод 3 и 5 связан только со своим датчиком угла поворота 4 или 6. При этом выход каждого из датчиков угла поворота 4 и 6 электрически связан со свободными портами компьютера 16.
Устройство работает следующим образом (см. фиг.1). Устройство устанавливают на движущемся транспорте, например на самолете, таким образом, чтобы объектив смотрел в сторону формируемого в пространстве светового пучка. При наличии в пространстве сильноколлимированного светового пучка объектив 1 принимает излучение, идущее от боковых сторон этого пучка, и формирует по закону центральной проекции на фотоприемной матрице 2 изображение 15 светового пучка. Для того чтобы обеспечить возможность поворота объектива 1 вокруг двух взаимно ортогональных осей, он устанавливается на двухстепенных координатных подвесах. Установка объектива 1 с возможностью его поворота вокруг двух взаимно ортогональных осей позволяет производить поиск светового пучка, обеспечив направление поля зрения объектива 1 таким образом, чтобы в него не попадали мешающие источники излучения, что существенно повышает помехоустойчивость данного устройства. При этом контроллер фотоприемной матрицы 13 обеспечивает последовательное считывание электрических сигналов с каждой ячейки фотоприемной матрицы 13 и матрицы памяти 9 через определенный интервал времени: если световой пучок является непрерывным, то этот интервал времени составляет 0,01÷1 секунд, если же световой пучок является импульсным, то этот интервал времени должен совпадать с периодом повторения импульсов этого светового пучка.
В случае, если световой пучок является импульсным, блок синхронизации 21 принимает по радиоканалу посылаемый от источника генерации светового пучка сигналы о моменте генерации каждого импульса светового излучения и передает эти сигналы на компьютер 16, а компьютер 16 по этим сигналам управляет работой контроллера 13 фотоприемной матрицы 2. При этом электрический переключатель 20 устанавливается таким образом, чтобы электрические сигналы с фотоприемной матрицы 2 попадали на инверсный вход дифференциального усилителя 10, минуя инвертор 19. При этом с матрицы памяти 9 электрические сигналы попадают на прямой вход этого же дифференциального усилителя 10. Таким образом, поскольку световой пучок является импульсным, вывод информации с фотоприемной матрицы 2 и матрицы памяти 9 в компьютер 16 происходит с частотой повторения импульсов этого светового пучка в тот момент, когда на фотоприемной матрице 2 объектив 1 формирует изображение фона в присутствие светового пучка. В матрицу памяти 9 переписывается информация с фотоприемной матрицы 2, когда отсутствует импульс светового пучка, т.е. переписывается изображение фона, формируемого объективом 1. Электрические сигналы, идущие с матрицы памяти 9 и с фотоприемной матрицы 2, попадают в дифференциальный усилитель 10 через входы с разными полюсами и там взаимовычитаются, причем вычитаются все фоновые сигналы, а сигналы с ячеек, на которых была сформирована проекция светового пучка, остаются и усиливаются. Усиленные электрические сигналы с дифференциального усилителя 10 попадают на пороговое устройство 11, которое пропускает электрические сигналы с величиной, превышающей заданный порог, что дополнительно позволяет очистить проекцию светового пучка от помех. Блок 12 формирования номера ячейки фотоприемной матрицы 2, связанный с выходом контролера 13 фотоприемной матрицы 2 и с выходом порогового устройства 11, определяет номера ячеек фотоприемной матрицы 2, на которые объективом 1 был спроецирован световой пучок, и передает эти данные на компьютер 16, который по этим данным строит изображение проекции светового пучка на мониторе 17. Т.о. на экране монитора 17 создается хорошо визуально воспринимаемое изображение проекции светового пучка, полностью соответствующее положению проекции этого пучка, получаемое на фотоприемной матрице 2. В то же самое время на экране монитора 17 можно отобразить направление движения транспортного средства, например самолета. При этом направление движения транспортного средства на экране монитора 17 будет всегда постоянным, как бы не перемещалось это транспортного средство в пространстве, т.к. экран монитора 17 неподвижно закреплен на этом транспортном средстве. Если же изменять положение транспортного средства, например самолет, в пространстве относительно светового пучка, то положение изображения проекции светового пучка на экране монитора 17 будет также изменяться. Положение изображения проекции светового пучка не будет изменяться в том случае, если направление движения, например самолета, будет совпадать с направлением самого светового пучка. Указанное транспортное средство, например самолет, можно переместить в пространстве таким образом, чтобы изображение направления его движения и изображении проекции светового пучка полностью перекрывали друг друга - это будет в том случае, если самолет будет лететь над световым пучком и вдоль него. При этом наблюдение за положением транспортного средства относительно светового пучка является очень простым и понятным, а точность самого ориентирования вследствие этого существенно повышается.
В случае, если световой пучок является непрерывным, то ключ 20 устанавливается таким образом, чтобы электрические сигналы с фотоприемной матрицы 2 попадали на инверсный вход дифференциального усилителя 10 через инвертор 19. При этом поступающие с матрицы памяти 9 и с фотоприемной матрицы 2 электрические сигналы будут не вычитаться, а складываться, поскольку прошедшие через инвертор 19 сигналы меняют знак на противоположный. Т.к. и на матрице памяти 9 и на фотоприемной матрице 2 будет отображаться проекция светового пучка, то сигналы, поступающие с тех ячеек этих матриц 9 и 2, на которых отобразилась проекция светового пучка, будут усилены в два раза, а со всех остальных ячеек этих матриц 9 и 2 электрические сигналы будут усилены в меньшей степени, поскольку время корреляции интенсивности фоновых источников меньше интервала времени между моментом записи информации с фотоприемной матрицы 2 в матрицу памяти 9 и моментом вывода информации с фотоприемной матрицы 2 и матрицы памяти 9 в компьютер 16. Поэтому на пороговом устройстве 11 можно будет установить достаточно определенный порог пропускания, который позволит выводить на компьютер электрические сигналы, идущие только от тех ячеек матриц 2, на которые был спроецирован световой пучок. Дальше все процессы в устройстве пойдут так, как они описаны выше. При этом блок синхронизации 21 не используется.
Следует отметить, что в обоих описанных выше случаях компьютер 16 получает сигналы о положении объектива 1 от датчиков 4 и 6 угла поворота приводов 3 и 5 и через контроллер 18 этих приводов 3 и 5 он осуществляет в автоматическом режиме наведение объектива 1 на световой пучок.
При наличии в устройстве двух схем регистрации светового пучка (см. фиг.2) каждая из этих схем работает так же, как это описано выше. При этом на компьютер 16 будут поступать сигналы от датчиков угла поворота 4 и 6, установленных в каждой из этих схем, т.е. компьютер 16 будут получать сведения о величине угла наклона оптических осей объективов 1, установленных в каждой из схем регистрации светового пучка, к плоскости, проходящей через вторые главные точки объективов 1 в первой и второй схемах регистрации сетевого пучка. Получая сведения о величине указанных углов наклона оптических осей объективов 1 в каждой из схем регистрации светового пучка и имея сведения о расстоянии между этими объективами 1, компьютер легко вычислит расстояние от движущегося транспортного средства до светового пучка и передаст эти сведения на соответствующий индикатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ | 2009 |
|
RU2416108C1 |
| Устройство для ориентации по световому лучу | 1983 |
|
SU1155067A1 |
| Устройство для измерения координат протяженного источника светового излучения В.Г.Ошлакова | 1979 |
|
SU849867A1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2369995C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОНТАКТНОГО ПРОВОДА | 1997 |
|
RU2137622C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗНОСА КОНТАКТНОГО ПРОВОДА | 1996 |
|
RU2138410C1 |
| Система формирования широкополосного гиперспектрального изображения на основе сжатого зондирования с нерегулярной дифракционной решеткой | 2014 |
|
RU2653772C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ НАСТРОЙКИ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БУМАГОДЕЛАТЕЛЬНЫХ МАШИН (ВАРИАНТЫ) | 2005 |
|
RU2294997C1 |
| МАТРИЧНЫЙ ТЕПЛОВИЗОР | 1998 |
|
RU2152138C1 |
Способ ориентирования в пространстве движущегося транспорта по световому лучу, по которому в заданную зону пространства в определенном направлении посылают световой луч, а на движущемся транспорте принимают излучение, идущее от боковых сторон этого луча. По этому излучению определяют положение этого луча в пространстве, после чего ориентируют движение транспорта относительно положения в пространстве этого светового луча. На движущемся транспорте излучение, идущее от боковых сторон светового луча, принимают с помощью первой оптической системы и с помощью этой же оптической системы это излучение посылают на первый фоточувствительный экран, выполненный в виде фотоприемной матрицы и установленный на движущемся транспорте. На фоточувствительном экране формируют оптическую проекцию светового луча. Возникшие от воздействия сформированной на фоточувствительном экране оптической проекции светового луча электрические сигналы посылают на персональную ЭВМ, с помощью которой затем формируют на видеоэкране изображение светового луча. На видеоэкране показывают направление движения данного транспорта и в дальнейшем ориентируют движение этого транспорта по показанному на этом же видеоэкране взаимному расположению изображения светового луча и направлению движения указанного транспорта. Устройство содержит компьютер, блок синхронизации и схему регистрации светового луча, в состав которой входят объектив, фотоприемная матрица, матрица памяти, дифференциальный усилитель, блок формирования номера ячейки, пороговое устройство. Кроме того, в устройстве дополнительно установлен монитор, а в схему регистрации светового луча введен контроллер фотоприемной матрицы. Также дополнительно установлены инвертор и электрический переключатель. Технический результат - повышение точности и возможность ориентирования движущегося транспорта при сохранении высокой наглядности и простоты ориентирования, а также возможность оперативного определения расстояния от наблюдателя до светового пучка. 2 н. и 5 з.п. ф-лы, 2 ил.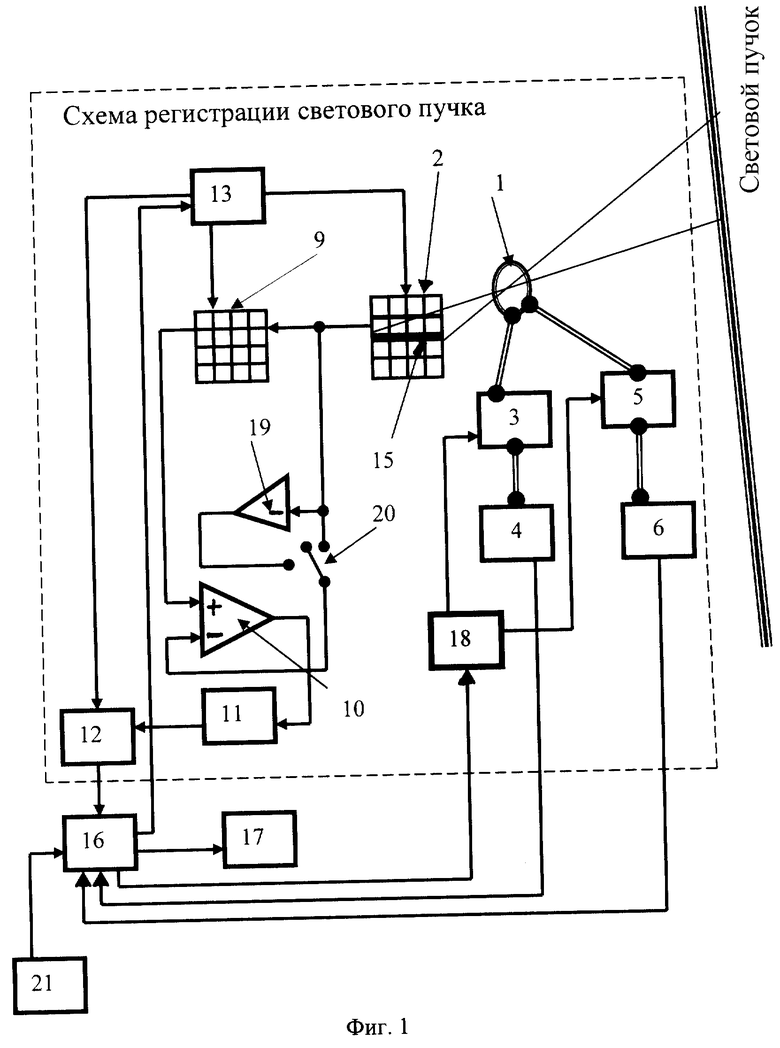
| ЗУЕВ В.Е., ФАДЕЕВ В.Я | |||
| ЛАЗЕРНЫЕ НАВИГАЦИОННЫЕ СИСТЕМЫ | |||
| - М., 1987, с.89-90, 153-155 | |||
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
| Устройство для ориентации по световому лучу | 1983 |
|
SU1155067A1 |
| Система ориентирования объектов в пространстве | 1985 |
|
SU1345833A1 |
| Газовая плоскопламенная горелка | 1973 |
|
SU595589A2 |
| Способ ориентирования объекта по световому лучу | 1988 |
|
SU1561432A1 |
| US 3698816 A, 17.10.1972. | |||

