Изобретение относится к области метрологии, в частности, к устройствам для калибровки мобильных координатных средств измерений (МКСИ): лазерных трекеров, сканеров, самонаводящихся электронных тахеометров и др.
Известны способы и устройства для калибровки стационарных и мобильных МКСИ [ASME В89.4.19-2006 Performance Evalution of Laser-Based Spherical coordinate Measurement Systems. AN AMERICAN National STANDARD, NEW YORK, NY 10016 - 2013; ГОСТ P ИСО 10360-2-2017 Характеристики изделий геометрические. Приемочные и перепроверочные испытания координатно-измерительных машин. Координатно-измерительные машины, применение для линейных размеров].
Недостатком данных способов и устройств является то, что в результате измерений определяется по двухточечной схеме измерений допуск на изменение длины между двумя точками, недостаточный для выявления действительных значений длин отрезков в заявленных производителем диапазонах измерений, а также выявления короткопериодических составляющих погрешности измерений при определении координат точек в трехмерном пространстве и повышения точности измерений.
Известен способ калибровки МКСИ на линейном оптико-механическом компараторе для калибровки линейных средств измерений, содержащем направляющую, по которой перемещается подвижная каретка со штриховой мерой и отражателем лазерного интерферометра, и эталонную призму 24-х гранник для проверки точности горизонтальных измерительных систем координатных средств измерений в сферической системе координат. Оптико-механический компаратор представляет ряд бетонных столбов с установленными на них отвесно и в одной вертикальной плоскости микроскоп-микрометрами. Расстояния между осями микроскоп-микрометров измеряются при помощи жезла известной длины, перемещаемого вдоль компаратора на тележке по установленному под ними рельсовому пути. Сумма этих расстояний составляет длину линейного компаратора. С этой длиной при помощи крайних микроскоп-микрометров сравниваются результаты измерений калибруемым средством измерений. Горизонтальные углы калибруются с дискретностью 15°, для повышения дискретности отсчитывания горизонтальных углов используется круговой измерительный преобразователь [Патент РФ №2320961, МКл. G01C 1/00, опубл. 27.03.2008. - бюл. №9].
Известен способ калибровки на универсальном метрологическом геодезическом стенде, содержащем устройство для измерения методом трилатерации горизонтальных и вертикальных углов [Патент РФ №2362978, МПК G01C 25/00, опубл. 27.07.2009. - бюл. №21].
Наиболее близкими по технической сущности и достигаемому результату являются способы калибровки МКСИ на широкодиапазонном компараторе для поверки и калибровки координатных средств измерений и поверочном комплексе координатных приборов и измерительных систем, содержащем композитный жезл для контроля линейных размеров и перемещений, а также неподвижные марки для контроля прямоугольных координат в пространстве по горизонтальной и вертикальной координатам. [Патент РФ №2401985, МПК G01C 3/00, опубл. 20.10.2010. - бюл. №29; Патент РФ №2494346, МПК G01C 25/00, опубл. 27.09.2013. - бюл. №27.(прототип)]
Недостатками указанных выше способов и устройств являются:
- из-за отсутствия единой с калибруемым МКСИ системы 3D-координат приводит к недостаточной точности измерений при передаче размеров от исходных линейных и угловых эталонов в пространстве;
- ограниченное количество калибруемых точек в диапазоне измерения горизонтальных и вертикальных координат;
- при калибровке сферических координат в заявленных производителем диапазонах измерений требуется перестановка калибруемого МКСИ или используемых эталонов;
- невозможность проверки короткопериодической составляющей погрешности измерений МКСИ при совместном пространственном определении координат X, Y и Z;
Технической задачей и целью изобретения являются:
- повышение точности измерений при калибровке трехкоординатных мобильных средств измерений;
- расширение диапазона измерений и функциональных возможностей рабочего эталона;
- калибровка сферических и прямоугольных координат, соответствующих математическим моделям реальных объектов.
Указанная цель достигается тем, что вначале создают эталонную систему 3D-координат, единую с калибруемым МКСИ, в которой с одной установки калибруемого МКСИ (с сохранением единой метрологической базы) выполняется калибровка трех сферических (радиуса-вектора, горизонтальных и вертикальных углов) и прямоугольных X,Y,Z координат в неограниченном количестве контролируемых точек заявленного производителем пространства измерений, при этом в известное устройство, состоящее из ряда бетонных столбов с направляющей, на которой установлена каретка с эталонным инварным геодезическим жезлом и расположенными над жезлом отвесно и в одной вертикальной плоскости фотоэлектрическими микроскопами (или микроскоп-микрометрами), стенда для измерения горизонтальных углов с призмой-многогранником, расположенной на поворотном столе, двух автоколлиматоров, стенда для измерения вертикальных углов, неподвижных марок-гнезд и лазерного интерферометра дополнительно введен линейно-угловой компаратор, состоящий из жесткой стойки, в которой на подшипниках поворачивается первым шаговым двигателем в горизонтальной плоскости на вертикальном валу платформа с прямолинейными направляющими и ходовым винтом, угол поворота вертикального вала отслеживается первым эталонным угловым кольцевым лазерным гироскопом, в направляющих прямолинейно перемещается стойка, в которой на подшипниках закреплен горизонтальный вал, в торце которого закреплена вторая прямолинейная направляющая, с двух концов которой установлены эталонные лазерные интерферометры, угол поворота горизонтального вала осуществляется вторым шаговым двигателем и считывается вторым эталонным угловым кольцевым лазерным гироскопом, по направляющей перемещается каретка с отражателями эталонных лазерных интерферометров и калибруемого МКСИ, при этом центр отражателя калибруемого МКСИ перемещением стойки совмещают с осью вращения вертикального вала.
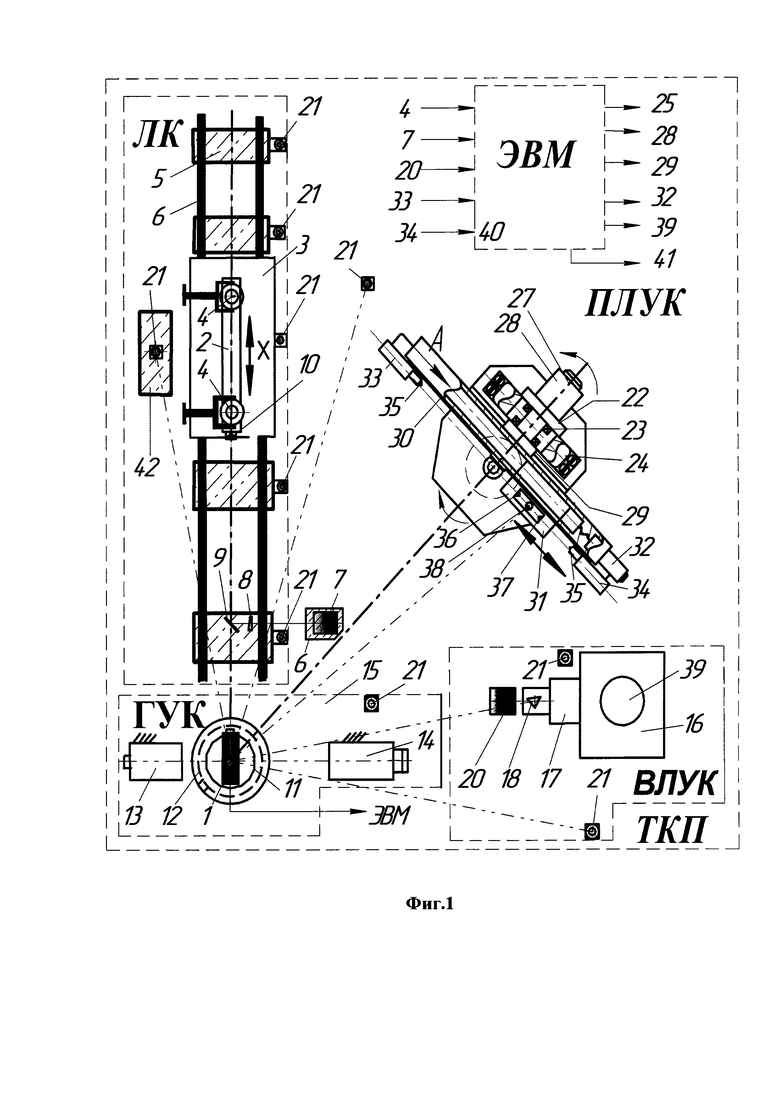
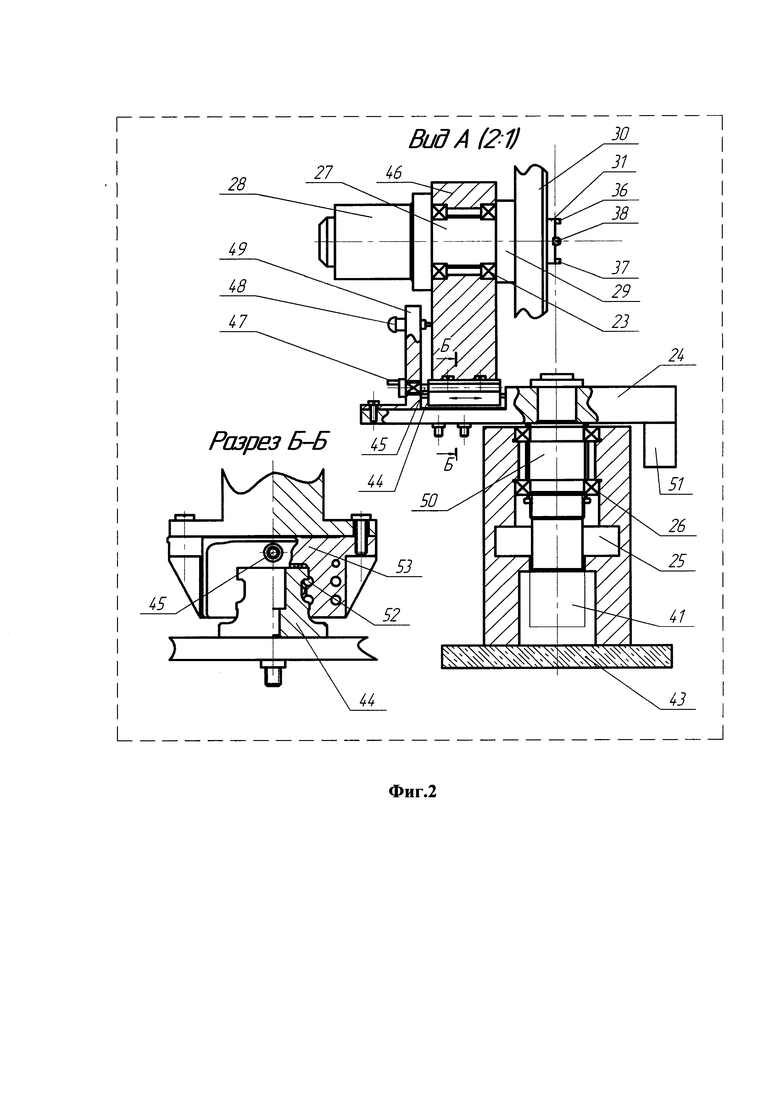
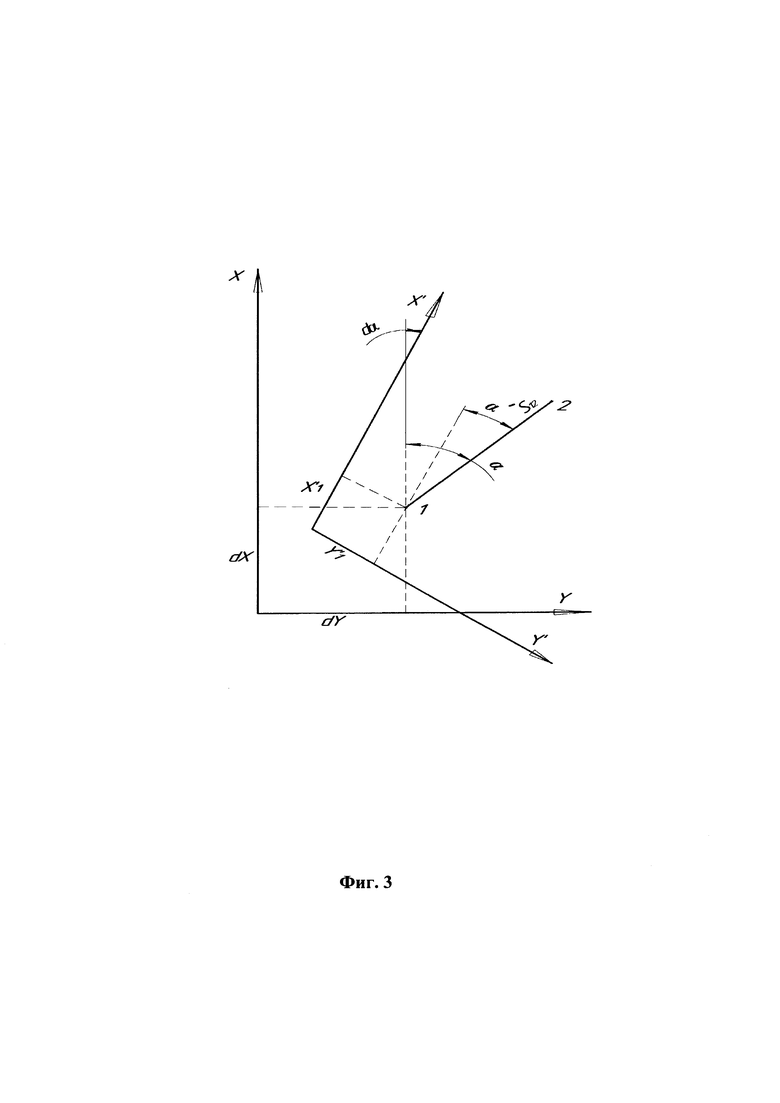
Сущность изобретения поясняется чертежами, где на фиг. 1 показана принципиальная схема Устройства для калибровки координат мобильных 3D-координатных средств измерений, на фиг. 2 приведен в разрезе чертеж пространственного линейно-углового компаратора, на фиг. 3 приведена схема совмещения осей эталонной призмы-многогранника и калибруемого МКСИ при исключении их несовпадения (эксцентриситета).
Устройство расположено в термоконстантном помещении (ТКП) и содержит: калибруемое МКСИ 1, эталонный геодезический жезл 2, расположенный на подвижной каретке 3, цифровые фотоэлектрические микроскопы 4, фундаменты 5, направляющие 6 для прямолинейного перемещения каретки 3, эталонный лазерный интерферометр 7, клин 8, поворотное зеркало 9, отражатели 10, 18 и 38 для ориентирования на них калибруемого МКСИ (отражатель 10 одновременно используется для эталонного интерферометра 7), эталонную призму-многогранник 11; поворотный стол 12, автоколлиматоры 13 и 14, расположенные на фундаменте 15, направляющую 16 для вертикального перемещения каретки 17 с отражателем 18 калибруемого МКСИ и отражателем 19 (расположен соосно с отражателем 18 внизу (на фиг. 1 не показан)) эталонного лазерного интерферометра 20, неподвижные марки-гнезда 21 (опорная марка-гнездо 2 расположена на отдельном фундаменте 42), неподвижную стойку 22, расположенную на фундаменте 43, в которой в подшипниках 26 на валу 50 вращается платформа 24, шаговый двигатель 41 и эталонный угловой лазерный гироскоп 25, в платформе 24 расположена направляющая 44 с ходовым винтом 45 для прямолинейного перемещения стойки 46, в стойке 46 на подшипниках 23 расположен вал 27, на котором жестко закреплены реверсивный шаговый двигатель 28, эталонный угловой кольцевой лазерный гироскоп 29 и направляющую 30 для прямолинейного перемещения каретки 31, на направляющей жестко закреплены шаговый двигатель 32, эталонные интерферометры 33, 34 и концевые выключатели 35, на каретке 31 также расположены отражатели 36 и 37 лазерных интерферометров 33 и 34, ЭВМ 40 управляет перемещением каретки 17 с помощью шагового двигателя 39 и каретки 31 с помощью шагового двигателя 32, микроподача 47 и индикатор 48, расположенные на кронштейне 49, позволяют выставить стойку 46 так, чтобы вертикальная ось вала 50 проходила через центр отражателя 38 калибруемого МКСИ, для совмещения центра тяжести направляющей 30 с осью вала 50 использован противовес 51, а стойка 46 расположена на каретке 53, перемещаемой на подах 52.
Устройство конструктивно представляет собой четыре, функционально объединенных, компаратора, совместно позволяющих повысить точность измерений и с одной установки калибруемого МКСИ откалибровать сферические координаты: радиус-вектор, горизонтальные и вертикальные углы, а также прямоугольные координаты XYZ (ЛК - линейный компаратор для калибровки дальномера калибруемого МКСИ, ГУК - угловой горизонтальный компаратор для калибровки горизонтальных углов в пределах 0÷60°, ВЛУК - линейный компаратор для калибровки вертикальных углов в пределах, углов, декларируемых производителем, ПЛУК - пространственный линейно-угловой компаратор для выявления короткопериодических составляющих погрешности измерений и остаточной неопределенности измерений координат в пространстве), и вычислительно-управляющую ЭВМ 40.
Способ калибровки мобильных 3D-координатных средств измерений реализуется следующим образом.
1. На первом этапе выполняют калибровку дальномера МКСИ (определение длины линейного радиуса-вектора), при этом сначала по жезлу 2 выставляют цифровые фотоэлектрические микроскопы 4 (отсчеты с них фиксируют на ЭВМ 40) и по жезлу 2 калибруют лазерный интерферометр 7 (результаты калибровки запоминают ЭВМ 40), каретка 3 при этом перемещается по направляющим 6, клин 8 и полупрозрачное зеркало 9 служат для совмещения осей калибруемого МКСИ 1, жезла 2 и лазерного интерферометра 7, отражатель 10 калибруемого МКСИ (совмещен с отражателем лазерного интерферометра 7) жестко закреплен на каретке 3, после чего выполняется калибровка дальномера калибруемого МКСИ по жезлу в рабочем диапазоне, а по лазерному интерферометру 7 выявляют короткопериодическую составляющую погрешности измерений и выполняется учет рефракции среды в диапазоне измерений, при этом длина жезла одновременно служит и дополнительным контролем результатов измерений. Результаты калибровки в дальнейшем используют при измерениях длины радиусов-векторов сферических пространственных координат, горизонтальных и вертикальных углов, измеряемых методом трилатерации. Кроме того, ЭВМ 40 запоминает вертикальную координату Z0, необходимую в дальнейшем для калибровки вертикальных углов.
2. На втором этапе выполняют калибровку горизонтальных углов β в пределах 0÷360°, при этом отражатель 10 остается неподвижным на каретке 3 при положении жезла в крайней дальней от МКСИ точке, призму-многогранник 11 ориентируют в пространстве измерений по автоколлиматорам 13 и 14 на первую грань; с учетом выявленных линейных поправок за эксцентриситеты выполняют калибровку горизонтальных углов β, при этом по разности координат положений отражателя 10, измеренных калибруемым МКСИ, вычисляют длину L и при известных откалиброванных радиусах-векторах a и в до отражателя 10 по теореме косинусов  в ЭВМ 40 вычисляется измеренный в пределах 0÷360° горизонтальный угол β, который сравнивается с учетом поправок за эксцентриситет с соответствующим углом эталонной призмы (действительные значения углов призмы-многогранника предварительно записаны в памяти ЭВМ 40). 3. На третьем этапе выполняют калибровку вертикальных углов у в заявленном производителем диапазоне измерений, при этом калибруемый МКСИ ориентируют на отражатель 18, расположенный на каретке 17 вертикального линейно-углового компаратора ВЛУК, одновременно, управляя шаговым двигателем 39, добиваются значения вертикальной координаты Z0, аналогичной той, которая была на компараторе ЛК. Значение вертикальной координаты принимают за начало отсчетов при калибровке вертикальных углов γ. Калибровка вертикальных углов выполняется также методом трилатерации, при этом размеры длин от калибруемого МКСИ до отражателя 18 вычисляют с учетом калибровки его линейного дальномера, а вертикальное перемещение каретки 17 вычисляют по лазерному интерферометру 20, отражатель 19 (на Фиг. 1 не показан) которого расположен внизу каретки 17 соосно с отражателем 18. Эталонный вертикальный угол γ вычисляют по теореме косинусов:
в ЭВМ 40 вычисляется измеренный в пределах 0÷360° горизонтальный угол β, который сравнивается с учетом поправок за эксцентриситет с соответствующим углом эталонной призмы (действительные значения углов призмы-многогранника предварительно записаны в памяти ЭВМ 40). 3. На третьем этапе выполняют калибровку вертикальных углов у в заявленном производителем диапазоне измерений, при этом калибруемый МКСИ ориентируют на отражатель 18, расположенный на каретке 17 вертикального линейно-углового компаратора ВЛУК, одновременно, управляя шаговым двигателем 39, добиваются значения вертикальной координаты Z0, аналогичной той, которая была на компараторе ЛК. Значение вертикальной координаты принимают за начало отсчетов при калибровке вертикальных углов γ. Калибровка вертикальных углов выполняется также методом трилатерации, при этом размеры длин от калибруемого МКСИ до отражателя 18 вычисляют с учетом калибровки его линейного дальномера, а вертикальное перемещение каретки 17 вычисляют по лазерному интерферометру 20, отражатель 19 (на Фиг. 1 не показан) которого расположен внизу каретки 17 соосно с отражателем 18. Эталонный вертикальный угол γ вычисляют по теореме косинусов:
где:
а - длина от калибруемого МКСИ до точки с координатой Z0
в - длина от калибруемого МКСИ до точки с координатой Zi,
L - перемещение каретки 17, измеренное лазерным интерферометром 20.
Калибруемый вертикальный угол γi вычисляют аналогично, только вместо L в формулу подставляется Li, вычисленное по разности вертикальных координат, измеренных калибруемым МКСИ. Поправка в вертикальный угол вычисляется по формуле:
Δγ=γ-γi
Шаг калибруемых вертикальных углов, направление перемещения каретки 17 и количество серий измерений предварительно предварительно задаются калибровщиком в ЭВМ 40.
4. На четвертом этапе выполняют калибровку горизонтальных и вертикальных углов с целью выявления короткопериодических составляющих погрешности измерений. Для этого калибруемый МКСИ ориентируется на отражатель 38, расположенный на пространственном линейно-угловом компараторе (ПЛУК); перемещая стойку 46 микроподачей 47, совмещают центр отражателя 38 с осью вращения вала 50, вращая с помощью шагового двигателя 28 направляющую 30 и перемещая по ней каретку 31 выставляют отражатель 38 в такое положение, когда его координаты не изменяются, это положение принимается за начальное, полученные координаты X0Y0Z0 построенной эталонной системы координат записываются в память ЭВМ 40, по разности полученных координат отражателя и ранее вычисленных координат МКСИ вычисляется длина радиуса-вектора (а). Обнуляются показания лазерных интерферометров 33 и 34. Далее каретка 31 перемещается на заданный в ЭВМ шаг, считываются значения координат отражателя МКСИ, после чего направляющая 30 доворачивается шаговым двигателем 28 до значения, когда вертикальная координата будет равна Z0, далее по полученным координатам отражателя 38 МКСИ аналогично вычисляется длина радиуса-вектора (в), перемещение каретки Li вычисляется как полусумма показаний двух лазерных интерферометров Li=(L33+L34)/2. Горизонтальный угол β вычисляют методом трилатерации по формуле (1), поправка Δβ - по формуле (2). Перемещая каретку 31 вдоль направляющей 30 с заданным шагом в разные стороны от нулевой точки, выполняют калибровку горизонтального угла в пределах углов, задаваемых призмой-многогранником 11. В процессе измерений ЭВМ следит за постоянством углов лазерных гироскопов 25 и 29, а оператор - за положением грани призмы-многогранника 11.
Далее по команде оператора шаговый двигатель 28 с помощью лазерного гироскопа 29 поворачивает направляющую 30 в вертикальной плоскости на угол 90° и аналогично выполняется с заданным шагом калибровка вертикального угла.
5. На пятом этапе выполняют калибровку пространственных прямоугольных 3D координат X,Y,Z или проверка соответствия записанной в памяти ЭВМ 40 заявленной математической модели сложного объекта, условно помещенного в эталонную систему координат с началом в точке X0Y0Z0. Положение калибруемых точек в эталонной системе координат определяется по известным линейным перемещениям отражателей 36 и 37 лазерных интерферометров 33 и 34 и угловым перемещениям лазерных гироскопов 27 и 29, записываемым в памяти ЭВМ 40. Пространственные координаты, измеренные калибруемым МКСИ, сравнивают с координатами эталонной системы координат, кроме того вычисляется эталонная и измеренная длина линии в пространстве между измеряемыми точками.
Погрешность измерения пространственных координат выполняют по формула:
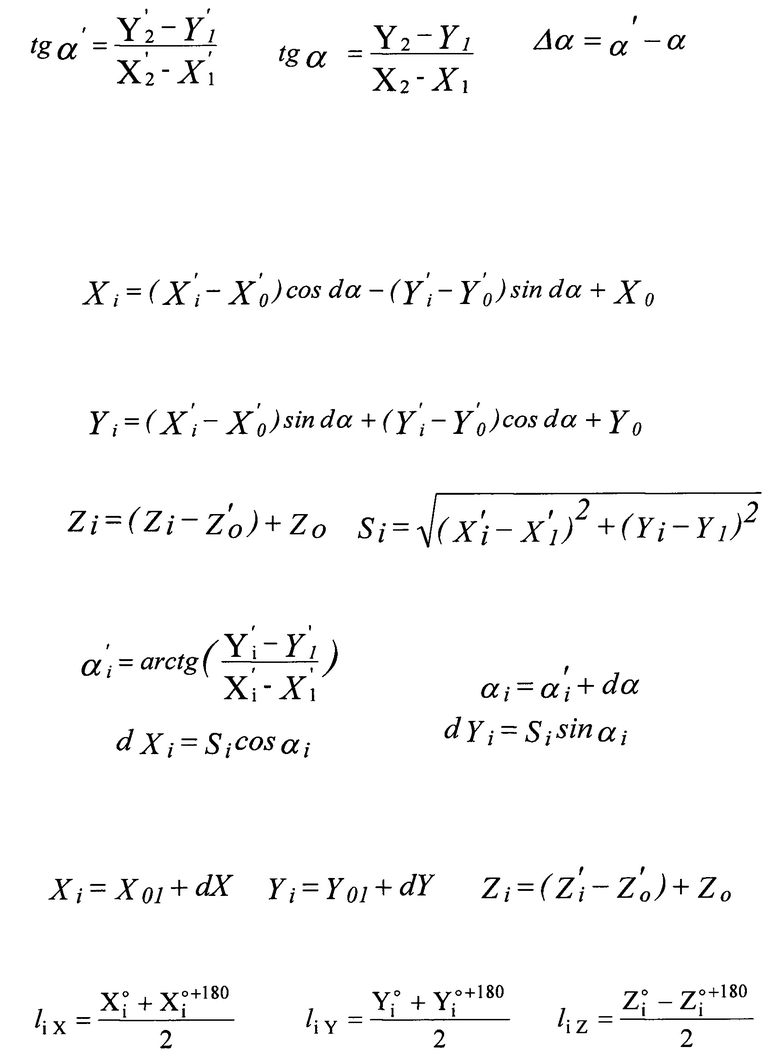
Вычисление эталонных координат  при смещении отражателя калибруемого МКСИ в плоскости XY при развороте вокруг оси Z производится по формулам:
при смещении отражателя калибруемого МКСИ в плоскости XY при развороте вокруг оси Z производится по формулам:
где: Х0,Y0,Z0 - начало эталонной системы координат,
Δβист - угол поворота радиус-вектора эталонной системы координат,
 - смещение отражателя по интерферометру.
- смещение отражателя по интерферометру.
Вычисление эталонных координат при одновременном смещении отражателя калибруемого МКСИ вокруг оси Z (в плоскости XY) и вокруг оси X (в плоскости YZ) производят по формулам:
Погрешности измерения координат вычисляют по формулам:

где:
Zизм, Хизм, Yизм - координаты, полученные из измерений трекером,
 - вычисленные координаты стенда,
- вычисленные координаты стенда,
Х0, Y0, Z0 - начало эталонной системы координат,,
 - начало системы координат трекера = 0,
- начало системы координат трекера = 0,
ΔХ, ΔY, ΔZ, Δγ, Δα - погрешности измерений.
Устройство работает следующим образом:
Перед калибровкой МКСИ выполняются следующие действия:
1) Определяются координаты калибруемого МКСИ, для этого калибруемое МКСИ 1 устанавливается на поворотном столе 12, расположенном на фундаменте 15, соосно с эталонной призмой-многогранником 11 горизонтального углового компаратора ГУК, при этом вертикальная ось вращения МКСИ пересекается с осью горизонтально расположенного эталонного жезла 2 и направлением измерительной оси эталонного интерферометра 7, совпадающими с направлением перемещения каретки 3 линейного компаратора ЛК и измерительной осью калибруемого МКСИ, призма-многогранник ориентируется в пространстве измерений по автоколлиматорам 13 и 14 на первую грань, отражатель 10 калибруемого МКСИ 1 перемещается поочередно на неподвижные марки-гнезда 21, МКСИ измеряет и вычисляет координаты каждой марки (не менее 3-х марок), которые передаются в ЭВМ 40 и по которым затем методом обратной засечки вычисляются координаты калибруемого МКСИ, поворачивая поворотный стол 12, ориентируют призму-многогранник на последующие грани по тем же маркам-гнездам 21, каждый раз измеряют координаты МКСИ, полученные результаты позволяют в дальнейшем выявить и учитывать угловые поправки по всем граням за счет влияния взаимных эксцентриситетов осей призмы-многогранника 11, поворотного стола 12 и калибруемого МКСИ 1 при калибровке горизонтальных углов в пределах 0÷360°. При вычислении эксцентриситета используются следующие формулы (см. фиг. 3):
Здесь
 - составляющие линейного эксцентриситета по координатным осям X, Y, Z,
- составляющие линейного эксцентриситета по координатным осям X, Y, Z,
 - координаты измеренных точек на заданной установке призмы,
- координаты измеренных точек на заданной установке призмы,
 - координаты, полученные после разворота призмы на 180°.
- координаты, полученные после разворота призмы на 180°.
Таким образом, средние значения координат, полученных по противоположным граням эталонной призмы, будут избавлены от влияния линейного эксцентриситета:

2) Определяются начальные координаты эталонной системы координат X0Y0Z0, для этого калибруемое МКСИ ориентируется на отражатель 38, вращением направляющей 30, поворотом платформы 24 и смещением каретки 31 добиваются постоянства прямоугольных координат, измеренных калибруемым МКСИ. Это положение отражателя 38 принимается за начало координат X0Y0Z0 эталонной системы координат, в эту точку математически переносятся приведенные координаты  калибруемого МКСИ, при этом направление осей полученной эталонной системы координат совпадает с направлением осей калибруемого МКСИ.
калибруемого МКСИ, при этом направление осей полученной эталонной системы координат совпадает с направлением осей калибруемого МКСИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2320961C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| Способ калибровки лазерного сканера, предназначенного для оценки качества поверхности сварного шва | 2023 |
|
RU2821171C1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ЦИФРОВЫХ НИВЕЛИРОВ И ШТРИХКОДОВЫХ РЕЕК | 2009 |
|
RU2419766C1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ НИВЕЛИРОВ И РЕЕК | 2006 |
|
RU2341772C2 |
| Координатная измерительная машина | 1990 |
|
SU1795264A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ "ЦИФРОВОЙ НИВЕЛИР+КОДОВАЯ РЕЙКА" | 2015 |
|
RU2584725C1 |
Изобретение относится к области метрологии, в частности к устройствам для калибровки мобильных координатных средств измерений (МКСИ): лазерных трекеров, сканеров, самонаводящихся электронных тахеометров и др. Способ калибровки мобильных 3D-координатных средств измерений заключается в том, что создают эталонную систему 3D-координат, единую с калибруемым МКСИ, в которой с одной установки калибруемого МКСИ (с сохранением единой метрологической базы) выполняется калибровка трех сферических (радиуса-вектора, горизонтальных и вертикальных углов) и прямоугольных X,Y,Z координат в неограниченном количестве контролируемых точек заявленного производителем пространства измерений. Устройство конструктивно представляет собой четыре функционально объединенных компаратора, расположенных на отдельных изолированных фундаментах: линейный компаратор с эталонным жезлом и лазерным интерферометром, оси которых совмещены с осью калибруемого средства измерений, угловой горизонтальный компаратор, линейный вертикальный компаратор и пространственный линейно-угловой компаратор. Технический результат – повышение точности измерений за счет создания единой системы координат, обеспечения единой метрологической базы при калибровке всех метрологических параметров калибруемого средства измерений, расширение диапазона измерений и функциональных возможностей. Калибровка сферических координат (длины радиуса-вектора, горизонтальных и вертикальных углов), а также прямоугольных координат X,Y,Z проводится с одной установки калибруемого координатного средства измерений. 2 н.п. ф-лы, 3 ил.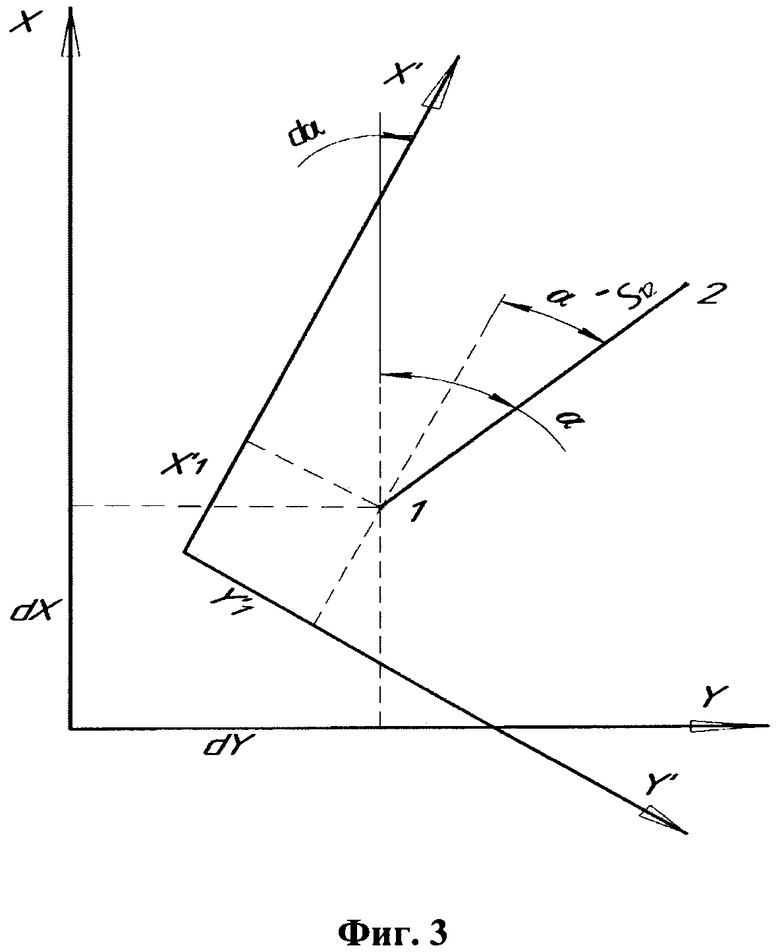
1. Способ калибровки мобильных 3D-координатных средств измерений, заключающийся в контроле прямоугольных координат в пространстве по горизонтальной и вертикальной координатам, отличающийся тем, что создают эталонную систему 3D-координат, единую с калибруемым мобильным координатным средством измерений (МКСИ), в которой с одной установки калибруемого МКСИ, с сохранением единой метрологической базы, выполняют калибровку трех сферических координат, радиуса-вектора, горизонтальных и вертикальных углов и прямоугольных координат X,Y,Z в неограниченном количестве контролируемых точек заявленного производителем пространства измерений.
2. Устройство калибровки мобильных 3D-координатных средств измерений, содержащее компаратор для линейных измерений, состоящий из фундаментов с прямолинейными направляющими для перемещения по ним подвижной каретки с расположенными на ней эталонным геодезическим жезлом и уголковым отражателем лазерного интерферометра, компаратор для измерений горизонтальных углов, состоящий из поворотного стола с призмой-многогранником, двух автоколлиматоров, расположенных навстречу друг другу через эталонную призму-многогранник, компаратор для измерений вертикальных углов, состоящий из направляющей, по которой перемещается каретка с отражателем эталонного интерферометра и калибруемого средства измерений, магнитные марки-гнезда для определения координат калибруемого средства измерений и калибруемое координатное средство измерений, имеющее связь с ЭВМ, при этом вертикальная ось вращения калибруемого средства измерений совпадает с центром призмы-многогранника, отличающееся тем, что для создания эталонной системы 3D-координат в него дополнительно введен пространственный линейно-угловой компаратор, содержащий неподвижную стойку, в которой на подшипниках первым шаговым двигателем выполнена поворачивающаяся вокруг вертикальной оси платформа, угол поворота платформы измеряется первым эталонным угловым кольцевым лазерным гироскопом, в платформе на подшипниках выполнен вращающийся горизонтальный вал, на котором закреплена направляющая прямолинейного перемещения каретки, поворот горизонтального вала осуществляют вторым шаговым двигателем и измеряют вторым эталонным угловым кольцевым лазерным гироскопом, на направляющей закреплены с двух ее сторон эталонные лазерные интерферометры для измерения перемещений каретки с отражателями лазерных интерферометров и калибруемого мобильного координатного средства измерений (МКСИ), переход от эталонной системы координат к пространственным координатам, измеряемым калибруемым МКСИ, осуществляют через измеренные им предварительно откалиброванные линейные размеры.
| ШЕСТИОСЕВАЯ КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА И СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНОГО НАКОНЕЧНИКА ДЛЯ НЕЕ | 2007 |
|
RU2345884C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ЦИФРОВЫХ НИВЕЛИРОВ И ШТРИХКОДОВЫХ РЕЕК | 2009 |
|
RU2419766C1 |
| DE 112014005649 T5, 15.09.2016. | |||

