Предполагаемое изобретение относится к области физики, геофизики и геологии и может быть использовано в установке ЯМР для непрерывного анализа структуры и состава флюидов полноразмерного керна.
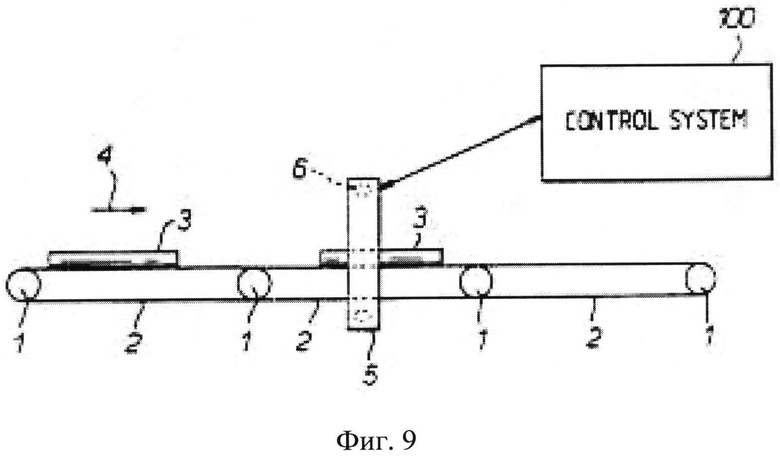
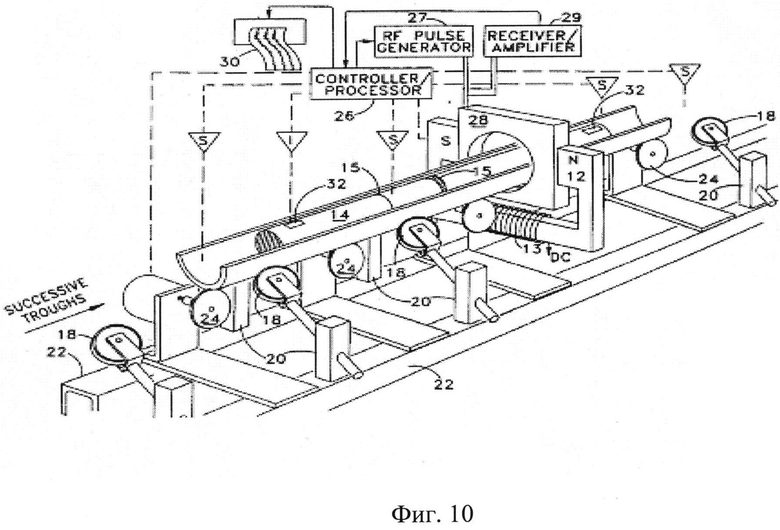
Известно устройство [1] (фиг.9, 10 Приложения 1) для перемещения керна (3), содержащее ленточный конвейер, около которого расположен магнит (5) с датчиком ЯМР (6). Лента конвейера (2) приводится в движение роликами (1). Керны (3), уложенные на ленту конвейера, по очереди проходят через рабочий объем датчика ЯМР (6) перпендикулярно седлообразному профилю магнитного поля. ЯМР эксперимент по контролю пористости выполняется на той части керна, которая расположена внутри рабочего объема датчика ЯМР. Керн может иметь диаметр от 2 до 3.5 дюймов (от 5.08 до 8.89 см).
Устройство [1] обладает следующими недостатками.
1. Отсутствуют приспособления, фиксирующие поперечное положение керна на ленте транспортера.
2. Отсутствуют приспособления, контролирующие движение керна через рабочий объем.
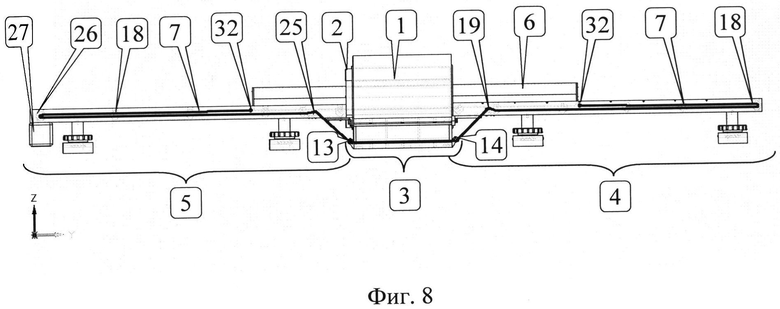
Наиболее близким по существу заявляемого изобретения прототипом, является устройство привода контейнера керна в автоматическом ЯМР анализаторе [2], упрощенное изображение взаимодействующих узлов которого показано на фиг.8.
Прототип и заявляемое устройство имеют общие признаки:
1. Привод и того и другого устройства состоит из двух частей - части, которая является смежной входной стороне и части смежной выходной стороне ВЧ блока ЯМР.
2. Оба устройства имеют приспособления, контролирующие положение контейнера керна вдоль его траектории движения.
3. В обоих устройствах для размещения керна используется контейнер из непроводящего немагнитного материала.
Элемент сцепления контейнера керна (14) (фиг.2), который позволяет его перемещать, это проточка (выемка), сделанная по всей длине вдоль нижней стороны контейнера. Элемент сцепления контейнера может быть зубчатым и входить в зацепление с зубчатым колесом двигателя (24) или наоборот, гладким и входить в контакт с роликом двигателя (24) посредством трения. Контейнер керна и ролик двигателя (24) саморасцепляются, когда контейнер переместится на расстояние большее длины элемента сцепления контейнера. Устройство привода содержит несколько шаговых двигателей с роликами (зубчатыми колесами), расположенных на некотором расстоянии один от другого вдоль несущей рамы. Для удерживания контейнера при его движении в центре рабочей зоны блока ЯМР служат боковые ролики (18), закрепленные в кронштейнах (20). Блок ЯМР, магнит и вся арматура прототипа установлены на общем основании, выполненным в форме рамы. По команде процессора устройство привода вводит контейнер с керном в блок ЯМР анализа с входной стороны, устанавливая последовательные участки керна в заданное положение в рабочем объеме блока ЯМР. Это положение контролируется сенсорными или оптическими датчиками. Блок ЯМР принимает заданное количество ЯМР откликов от последовательных участков керна.
Недостатками прототипа [2] являются:
1. Сложность и, следовательно, ненадежность конструкции устройства привода, которая может не выдержать полноразмерный керн весом до 30 кГ;
2. Отсутствие регулировки положения контейнера в рабочей зоне блока ЯМР по вертикали и горизонтали делает невозможным расположение керна в зоне наиболее однородного магнитного поля при изменении его диаметра, увеличивая погрешность анализа.
3. Большое количество шаговых двигателей, работа которых неустойчива при наличии внешнего магнитного поля (поля рассеяния магнита).
Заявленное техническое решение иллюстрируется следующими материалами.
На Фиг.1 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (внешний вид установки «ЯМР-керн»).
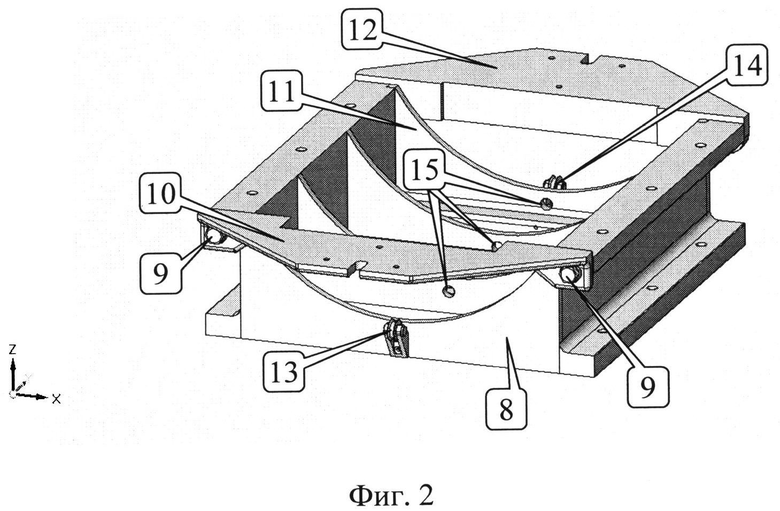
На Фиг.2 представлено элемент сцепления контейнера керна (который позволяет его перемещать УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (станина магнита Хальбаха).
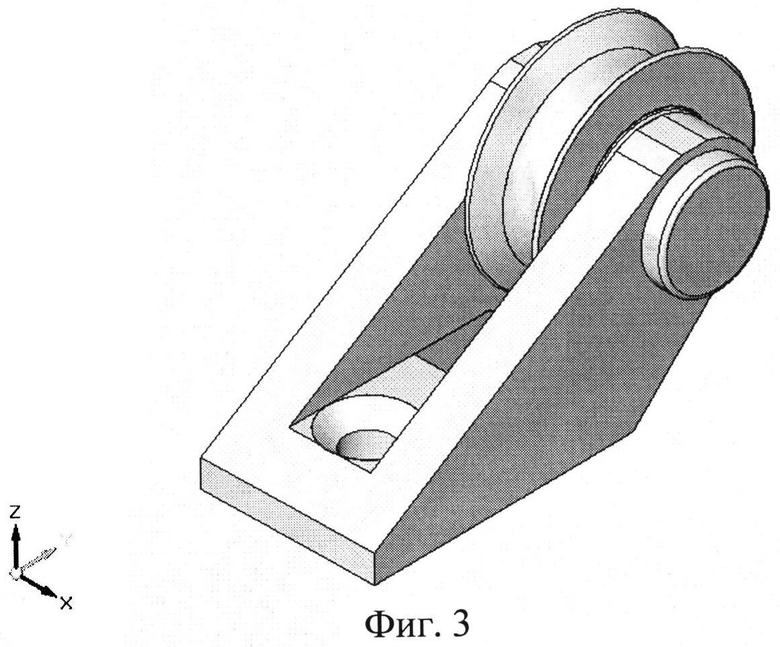
На Фиг.3 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (ролик троса).
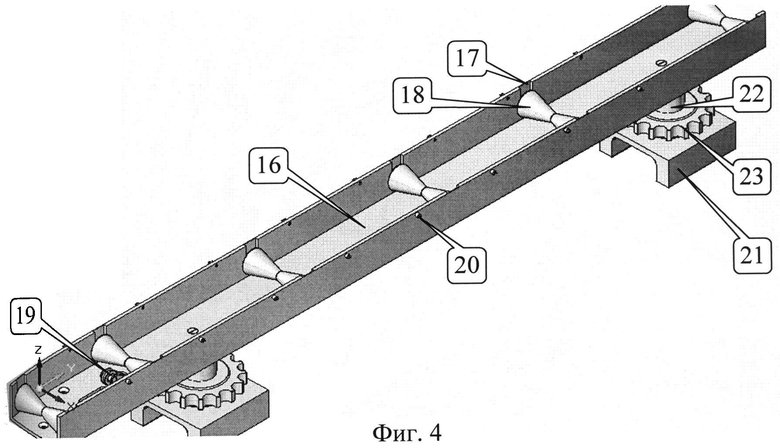
На Фиг.4 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (подающий модуль).
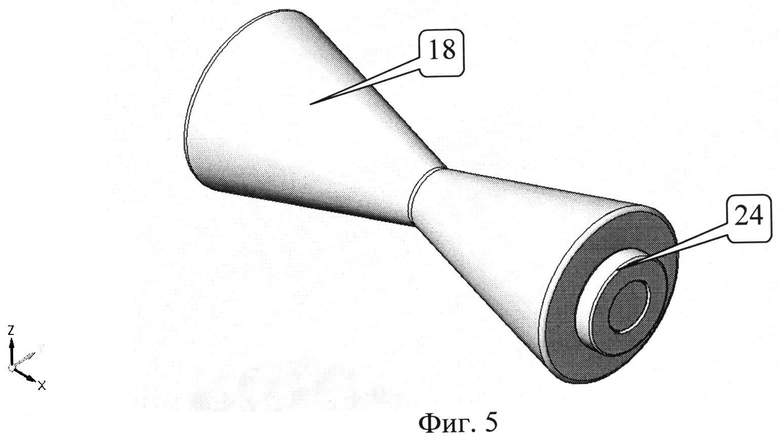
На Фиг.5 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ
ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР(подающий модуль).
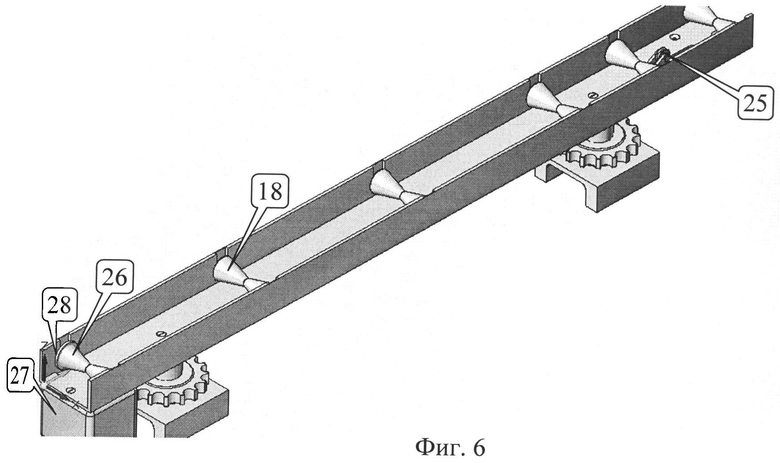
На Фиг.6 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР(приемный модуль).
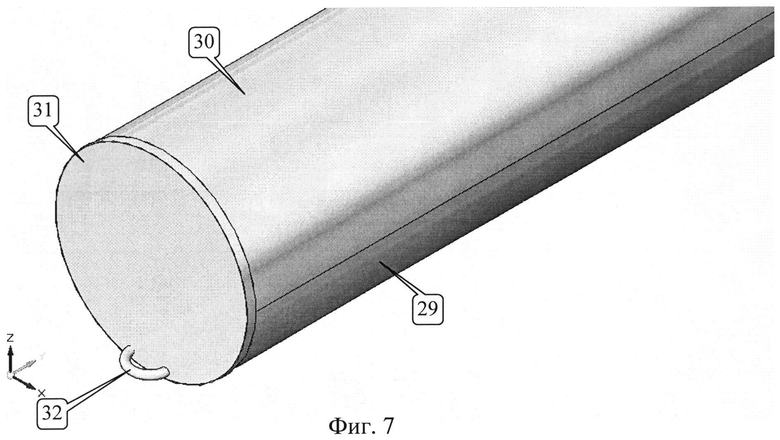
На Фиг.7 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (контейнер керна).
На Фиг.8 представлено УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ ПОЛНОРАЗМЕРНОГО КЕРНА В ДАТЧИКЕ ЯМР (принцип действия транспортирующего устройства).
На Фиг.9. Упрощенное изображение взаимодействующих узлов прототипа № US 5525904 (A) «Determination of rock core characteristics» (МПК G01N 24/08; G01R 33/20; G01R 33/383; G01R 33/44; G01V 3/32; G01N 24/00; G01R 33/38; G01V 3/18.
На Фиг.10. Упрощенное изображение взаимодействующих узлов прототипа № US 5525904 (A) «Determination of rock core characteristics» (МПК G01N 24/08; G01R 33/20; G01R 33/383; G01R 33/44; G01V 3/32; G01N 24/00; G01R 33/38; G01V 3/18.
Целью предполагаемого изобретения является;
- упрощение конструкции,
- повышение надежности,
- уменьшение веса,
- удешевление устройства прецизионного перемещения керна в датчике ЯМР.
Поставленная цель достигается тем, что перемещение контейнера керна осуществляется по независимым опорным двухконусным роликам подающего и приемного конвейерных модулей посредством буксировочного непроводящего немагнитного тросика, концы которого закреплены в буксировочных кронштейнах торцевых крышек контейнера, образуя замкнутый контур.
Заявляемое изобретение использовано в установке «ЯМР-керн», предназначенной для непрерывного анализа структуры и состава флюидов полноразмерного керна. Суть заявляемого изобретения поясняется фиг.1, на которой показан внешний вид установки «ЯМР-керн». Установка состоит из следующих элементов.
1. Магнит Хальбаха.
2. Блок ЯМР.
3. Станина магнита Хальбаха с кронштейнами крепления конвейерных модулей и опорными роликами троса
4. Подающий конвейерный модуль.
5. Приемный конвейерный модуль.
6. Контейнер керна.
7. Буксировочный трос.
К составу заявляемого изобретения относятся позиции с (3) по (7). Рассмотрим их подробнее.
Станина магнита Хальбаха с кронштейнами крепления конвейерных модулей и опорными роликами показана на фиг.2. Станина имеет сварную конструкцию из стандартного дюралюминиевого профиля равнополочного швеллерного сечения (ГОСТ 13623-90) и неравнополочного уголкового сечения (ГОСТ 13738-91). На торцевой панели (8) станины на болтах (9) установлен кронштейн (10), для крепления приемного конвейерного модуля (5). На торцевой панели (11) - кронштейн (12) для крепления подающего конвейерного модуля (4). Кронштейны выполнены того же дюралюминиевого профиля неравнополочного уголкового сечения (ГОСТ 13738-91). Посадочные отверстия в кронштейнах (11) и (12) на два миллиметра больше диаметра болтов (9). Это дает возможность регулировки положения кронштейна относительно станины по вертикали и горизонтали. Параллельность же прилегающих плоскостей кронштейнов и панелей станины достигается установкой регулировочных шайб разной толщины, непоказанных на рисунке. Указанные регулировки обеспечивают соосность конвейерных модулей и блока ЯМР. В нижней части панелей (8) и (11) установлены ролики троса (13) и (14), фиг.3. Через эти ролики и отверстия (15) буксировочный трос (7) проходит от приемного (5) к подающему (4) конвейерным модулям.
Подающий конвейерный модуль (4) (фиг.4) представляет собой несущий корпус (16), выполненный из дюралюминиевого профиля равнополочного швеллерного сечения ГОСТ 13623-90. В выемках (17) стенок корпуса (16) в подшипниках качения (24) (фиг.5) установлены пассивные опорные двухконусные ролики (18). В непосредственной близости от места крепления модуля к кронштейну станины (12) установлен ролик троса (19) (фиг.3), с которого буксировочный трос попадает на ролик троса (14) станины. В стенках корпуса (16) установлены оптические датчики (20) положения контейнера керна. Корпус модуля (16) установлен на двух винтовых опорах, каждая из которых состоит из основания (21), выдвижного винта (22), и регулировочной гайки-барашка (23) для ручной юстировки соосности модуля и блока ЯМР.
Приемный конвейерный модуль (5), внешний вид которого показан на фиг.6, отличается от подающего модуля (4) тем, что имеет пять пассивных опорных двухконусных роликов (18) и один ведущий опорный двухконусный ролик (26). Ведущий двухконусный ролик соединен с редуктором электродвигателя (27) зубчатой передачей (28).
Контейнер керна (6) из непроводящего и немагнитного материала, часть которого, обращенная к приемному модулю, показана на фиг.7, состоит из основания (29), верхней крышки (30) и торцевой крышки (31) с буксировочным кронштейном (32).
Фиг.8 поясняет принцип действия транспортирующего устройства, который состоит в следующем. Как уже говорилось, контейнер керна (6) перемещается через рабочий объем датчика ЯМР при помощи буксировочного тросика (7), приводимого в движение ведущим роликом (26). Одним концом тросик закреплен в буксировочном кронштейне (32) на торцевой крышке контейнера (31) со стороны приемного конвейерного модуля (5), а другим концом - в буксировочном кронштейне на торцевой крышке контейнера со стороны подающего конвейерного модуля (4) Со стороны приемного модуля тросик проходит сверху над пассивными опорными двухконусными роликами (18), охватывает ведущий двухконусный ролик (26), делая один оборот вокруг него, и, затем, снизу возвращается к ролику троса приемного конвейера (25). Далее через ролик троса станины (13) и отверстия в элементах конструкции станины (15) (фиг.2) тросик попадает на второй ролик троса станины (14) и, затем, через ролик троса (19) проходит снизу пассивных двухконусных роликов подающего конвейера и через последний двухконусный пассивный ролик (18) сверху возвращается к контейнеру керна (6). Тросик в упруго натянутом состоянии закрепляется в буксировочном кронштейне торцевой крышки контейнера со стороны подающего конвейера, что позволяет контейнеру одинаково хорошо перемещаться как в прямом, так и в обратном направлении. Благодаря тому, что буксировочные кронштейны, к которым крепятся концы тросика, находятся в нижней части торцевых крышек, контейнер (6) в процессе движения не проворачивается вокруг своей продольной оси. В боковые стенки корпуса подающего конвейерного модуля (4) встроены оптические датчики (20), которые находятся на расстоянии 150 мм друг от друга, соответствующем размеру активной зоны датчика ЯМР. Наличие датчиков позволяет смещать контейнер керна в автоматическом режиме строго на одинаковое расстояние.
В качестве основного положительного эффекта использования предполагаемого изобретения следует отметить простоту и легкость его эксплуатации. Данный эффект возникает вследствие особенности конструкции устройства, заключающейся в том, что и подающий и приемный конвейеры выполнены в виде отдельных модулей роллингового типа (фиг.4 и фиг.6). Конструкция модулей предельно проста и практически одинакова. Как уже говорилось, различие состоит лишь в том, что у приемного конвейера - пять пассивных двухконусных роликов и один двухконусный ролик ведущий. Конвейерные модули, закрепленные на станине магнита, объединены буксировочным непроводящим немагнитным тросиком в функционально полный механизм. Контейнер керна приводится в движение лишь одним электродвигателем, редуктор которого вращает один ведущий двухконусный ролик, с обернутым вокруг него для надежного сцепления буксировочным тросиком.
Второй положительный эффект - отсутствие поперечного перемещения возникает из-за применения двухконусных роликов (фиг.5) в качестве опорных и направляющих контейнер керна элементов. Это исключает поперечное перемещение контейнера и позволяет центрировать его в зазоре магнита. В результате отпадает необходимость в боковых удерживающих роликах [2], что существенно упрощает и облегчает конструкцию каждого из модулей.
Третий положительный эффект - отсутствие проворачивания контейнера керна вокруг продольной оси. Данный эффект возникает вследствие творческого решения предложенного авторами, а именно - удачного расположения буксировочных кронштейнов, к которым крепится буксировочный тросик, в нижней части торцевых крышек контейнера. Это создает момент сил, стабилизирующий осевое положение контейнера.
Таким образом, предельная простота конструкции, достигаемая в том числе использованием стандартных деталей, малый вес, обусловленный использованием дюралюминия и надежность устройства прецизионного перемещения контейнера керна, позволяют сделать вывод о том, что цель предполагаемого изобретения достигнута. Совокупность упомянутых положительных качеств предполагаемого изобретения, делает возможным его серийное промышленное производство. Легкость монтажа устройства позволяет использовать его в мобильном варианте ЯМР анализатора - ЯМР анализаторе полноразмерного керна.
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
1. Патент США № US 5525904 (A) «Determination of rock core characteristics» (МПК G01N 24/08; G01R 33/20; G01R 33/383; G01R 33/44; G01V 3/32; G01N 24/00; G01R 33/38; G01V 3/18, заявитель: OXFORD INSTR LTD [GB], авторы: HANLEY PETER [GB], опубл. 1996-06-11).
2. Патент США № US 4885540 (A) «Automated nuclear magnetic resonance analysis» (МПК G01R 33/44; G01V 3/32, заявитель: АМОСО CORP [US], авторы: SNODDY MICHAEL L [US] и др., опубл. 1989-12-05).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КЕРНОВ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2747741C1 |
| УСТРОЙСТВО ЯДЕРНО-МАГНИТНОГО РЕЗОНАНСА В ПОЛЕ ЗЕМЛИ ДЛЯ ИССЛЕДОВАНИЯ ПОЛНОРАЗМЕРНЫХ КЕРНОВ | 2011 |
|
RU2457516C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| УСТРОЙСТВО ЯДЕРНО-МАГНИТНОГО КАРОТАЖА | 2012 |
|
RU2495458C2 |
| ГИДРОДИНАМИЧЕСКАЯ УСТАНОВКА ДЛЯ МОДЕЛЬНЫХ ИСПЫТАНИЙ ПОДВОДНЫХ СНАРЯДОВ | 1995 |
|
RU2203469C2 |
| Линия резки труб | 1982 |
|
SU1191202A1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЯДЕРНОГО МАГНИТНОГО КАРОТАЖА В ПОЛЕ ПОСТОЯННОГО МАГНИТА | 2014 |
|
RU2583881C1 |
| Гибкий производственный модуль электроэрозионной последовательной вырезки группы заготовок | 1985 |
|
SU1321537A1 |
| СПОСОБ ЯДЕРНО-МАГНИТНОГО КАРОТАЖА И УСТРОЙСТВО ЯДЕРНО-МАГНИТНОГО КАРОТАЖА | 2008 |
|
RU2361247C1 |
| Стенд измерения магнитных полей | 2024 |
|
RU2837494C1 |
Предложено устройство прецизионного перемещения полноразмерного керна в датчике ЯМР. Устройство содержит подающий и приемный конвейерные модули. Контейнер керна вместе с капроновым буксировочным тросиком, объединяющим подающий и приемный конвейерные модули, образует замкнутый контур. Техническими результатами являются упрощение конструкции, повышение надежности и уменьшение веса устройства. 3 з.п. ф-лы, 10 ил.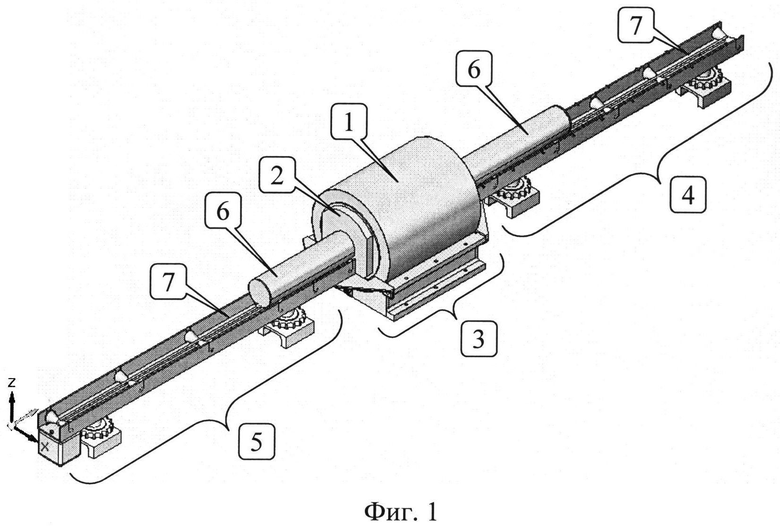
1. Устройство прецизионного перемещения полноразмерного керна в датчике ЯМР, содержащее подающий и приемный конвейерные модули, отличающееся тем, что контейнер керна вместе с капроновым буксировочным тросиком, объединяющим подающий и приемный конвейерные модули, образует замкнутый контур.
2. Устройство по п.1, отличающееся тем, что подающий и приемный конвейерные модули вместе со станиной магнита Хальбаха образуют жесткую конструкцию, которая обеспечивает соосность блока ЯМР и контейнера керна.
3. Устройство по п.1, отличающееся тем, что подающий конвейерный модуль представляет собой роллинг с шестью пассивными сдвоенными двухконусными роликами в подшипниках качения, размещенными в выемках корпуса в виде стандартного дюралюминиевого профиля равнополочного швеллерного сечения.
4. Устройство по п.1, отличающееся тем, что приемный конвейерный модуль представляет собой роллинг с пятью пассивными двухконусными роликами и одним ведущим двухконусным роликом в подшипниках качения, размещенными в выемках корпуса в виде стандартного дюралюминиевого профиля равнополочного швеллерного сечения.
| US 5525904 A, 11.06.1996 | |||
| US 4885540 A, 05.12.1989 | |||
| US 5201219 A, 13.04.1993 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛНОЙ ПОРИСТОСТИ МЕТОДОМ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА | 1998 |
|
RU2187132C2 |

