Изобретение относится к способам формирования многолучевой диаграммы направленности (ДН) приемных антенных решеток и предназначено для использования в антенных устройствах связных и радиолокационных систем.
Известен способ формирования диаграммы направленности [Бурдик B.C. Анализ гидроакустических систем. Л. Судостроение, 1988, с.295, 296], который заключается в приеме отраженного сигнала посредством антенной решетки, временной задержке выходных сигналов элементов решетки и последующем их суммировании. Недостатком этого способа является сложность его практического воплощения, обусловленная наличием проблем технического характера, которые в основном связаны с необходимостью реализации большого числа стабильных, идентичных и перестраиваемых аналоговых линий задержки.
Также известен способ формирования диаграммы направленности [Найт У.С., Придэм Р.Г. и Кей С.М. Цифровая обработка сигналов в гидролокационных системах. ТИИЭР, т.69, N 11, 1981, с.107], который заключается в приеме сигнала S(t) посредством плоской антенной решетки, дискретизации выходных сигналов элементов антенной решетки, двухступенчатом формировании лучей диаграммы направленности раздельно в азимутальной и угломестной плоскостях. Согласно данному способу, выходной сигнал xmn(t) произвольного элемента с номером (m, n) антенной решетки размером M*N элементов посредством дискретизации с частотой Fд преобразуется во временной ряд xmn(iTд) отсчетов (где i - номер отсчета), т.е. выборок xmn(t), взятых с шагом дискретизации Tд=(Fд)-1. Формирование лучей диаграммы направленности в известном способе основано на компенсации временных задержек между моментами поступления фронта принимаемой волны на элементы решетки раздельно в азимутальной и угломестной плоскостях, путем задержки выборок xmn(iТд) на время, кратное Tд. При этом выходной сигнал b(iTд) любого луча из формируемого набора лучей диаграммы направленности также представляет собой временной ряд.
Недостатком этого способа является ограниченная точность формирования диаграммы направленности. Ограничение точности связано с тем, что данный способ допускает формирование только "синхронных" лучей диаграммы направленности, т.е. таких, для которых значения времен задержки прихода фронта принимаемой волны кратны шагу дискретизации Тд.
Также известен способ формирования диаграммы направленности [пат. РФ 2072525 G01S 3/80, 1997], принятый в качестве прототипа, который заключается в приеме сигналов посредством плоской антенной решетки, дискретизации выходных сигналов элементов антенной решетки и двухступенчатом формировании лучей диаграммы направленности раздельно в азимутальной и угломестной плоскостях. При этом задают углы θ и φ, соответственно в азимутальной и угломестной плоскостях, одновременно с дискретизацией осуществляют формирование луча диаграммы направленности по углу θ и компенсацию антенной решетки по углу φ, для чего при дискретизации выборки выходных сигналов соседних элементов антенной решетки получают со сдвигом во времени, величину которого выбирают исходя из значения угла θ для элементов, имеющих одинаковые координаты в угломестной плоскости, и исходя из значения угла φ для элементов, имеющих одинаковые координаты в азимутальной плоскости, формируют вектор Y действительных дискретных сигналов, каждую компоненту которого получают посредством весового суммирования выборок, полученных из выходных сигналов тех элементов антенной решетки, которые имеют одинаковые координаты в угломестной плоскости, затем производят формирование набора лучей в угломестной плоскости, после чего осуществляют выделение отсчетов комплексной огибающей сигналов, принятых по каждому из набора лучей. Формирование каждого из набора лучей в угломестной плоскости осуществляют посредством суммирования компонент вектора Y с комплексными весовыми коэффициентами.
Недостатками прототипа является:
- в прототипе осуществляется параллельное формирование диаграммы направленности, и чем больше необходимо сформировать лучей, тем больше требуется блоков формирования луча, это обстоятельство не дает гибкости при реализации устройств с разным числом лучей, необходимо переделывать конструкцию устройства, увеличивать число блоков и связей между ними, вес и энергопотребление устройства;
- прототип предназначен для формирования ДН в виде «набора лучей», представляющих собой веер узких лучей в угломестной плоскости, перестройка всех этих лучей осуществляется одновременно. Задаются только углы θ и φ, которые в прототипе являются не углами направления отдельного луча, а центральными направлениями веера лучей. Для этого в прототипе производят аналоговые задержку и весовое суммирование сигналов с линейки элементов антенной решетки в азимутальной плоскости, после чего выполняют преобразование аналогового сигнала в цифровой код и далее формируют лучи в угломестной плоскости. Таким образом, в прототипе невозможно управление отдельными лучами, а веер лучей формируется только в уломестной плоскости. Однако в радиолокации часто требуется формирование многолучевой ДН с независимым управлением каждым лучом, при этом требуется возможность задания углов θ1…θК и φ1…φК для каждого k-го формируемого луча i=1…M. Прототип не обеспечивает этих требований;
- в прототипе используется аналоговое суммирование при формировании лучей в азимутальной плоскости, что не обеспечивает высокой точности наведения лучей при работе в условиях измерения рабочей температуры.
Цель предлагаемого изобретения состоит в разработке способа формирования диаграммы направленности, обеспечивающего устранение зависимости объема аппаратуры от количества формируемых лучей и формирование многолучевой диаграммы направленности с независимым управлением лучами.
Для достижения указанной цели предлагается способ формирования диаграммы направленности, заключающийся в приеме сигнала посредством плоской антенной решетки, дискретизации выходных сигналов элементов антенной решетки, формировании лучей диаграммы направленности раздельно в азимутальной и угломестной плоскостях, причем формирование ДН в угломестной плоскости производится посредством весового суммирования выборок, полученных из выходных сигналов тех элементов антенной решетки, которые имеют одинаковые координаты в угломестной плоскости, затем производят формирование набора лучей в угломестной плоскости.
Согласно изобретению, задают углы направления максимумов лучей в азимутальной θ1…θk и угломестной φ1…φk плоскостях, где K - число формируемых лучей, формируют потоки цифровых отсчетов из аналоговых сигналов на выходах антенных элементов путем синхронной дискретизации по времени и квантования по амплитуде, преобразуют последовательность отсчетов с выходов элементов антенной решетки в последовательность квадратурных отсчетов, выполняют фильтрацию и децимацию полученных последовательностей отсчетов в К раз, формируют для каждого канала приема последовательность взвешенных отсчетов путем умножения каждого квадратурного отсчета на весовые коэффициенты, соответствующие координатам лучей с 1 по К-й в азимутальной плоскости, при этом данные в полученной последовательности располагают группами по К отсчетов, относящимся к лучам с 1 по К-й, а частота следования равна частоте дискретизации, формируют для каждого m-го ряда антенных элементов последовательность с отсчетами парциальных лучей ДН в азимутальной плоскости путем суммирования взвешенных отсчетов каналов приема этого ряда, следующих с периодом К и относящихся к одинаковым моментам дискретизации, формируют для каждого ряда последовательность взвешенных отсчетов путем умножения каждого отсчета, относящегося к k-му лучу на весовые коэффициенты, соответствующие координатам лучей в угломестной плоскости, формируют результирующую последовательность отсчетов К лучей ДН путем суммирования взвешенных отсчетов каждого ряда, относящихся к k-му лучу, относящихся к одинаковым моментам дискретизации.
Проведенный сравнительный анализ заявленного устройства и прототипа показывает, что заявленное устройство отличается тем, что:
- в прототипе осуществляется параллельное формирование диаграммы направленности, и чем больше необходимо сформировать лучей, тем больше требуется блоков формирования луча в устройстве, реализующем прототип. В отличие от этого, в предлагаемом способе используется последовательное формирование лучей путем последовательного умножения каждого отсчета сигнала на весовые коэффициенты каждого луча и отдельного суммирования отсчетов, относящихся к каждому лучу, при этом увеличение числа формируемых лучей не требует увеличения числа блоков в устройстве, что обеспечивает гибкость при реализации устройств для разных применений;
- в прототипе осуществляется формирование «набора лучей» в виде веера узких лучей в угломестной плоскости, перестройка всех этих лучей осуществляется одновременно. Углы θ и φ в прототипе являются центральными направлениями веера лучей. В отличие от этого, в предлагаемом способе каждый луч имеет собственные координаты направления, лучи могут быть расположены в пространстве в произвольном порядке с координатами в азимутальной θ1…θk и угломестной φ1…φk плоскостях, где K - число формируемых лучей;
- в прототипе при формировании лучей в азимутальной плоскости перевод сигналов в цифровую форму выполняется после сдвига во времени в аналоговой задержке и взвешенного суммирования сигналов. В отличие от этого, в предлагаемом способе дискретизация сигналов со всех элементов антенной решетки выполняется синхронно, а цифровой сдвиг и суммирование сигналов производится в цифровом виде, что обеспечивает стабильность характеристик при изменении температуры в пределах рабочего диапазона.
Сочетание отличительных признаков и свойства предлагаемого способа формирования ДН из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
На фиг.1 приведена структурная схема устройства, реализующего предлагаемый способ.
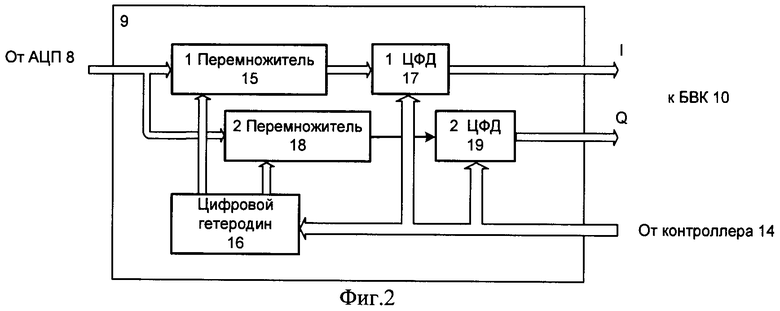
На фиг.2 приведена структурная схема блока цифрового гетеродинирования БЦГ.
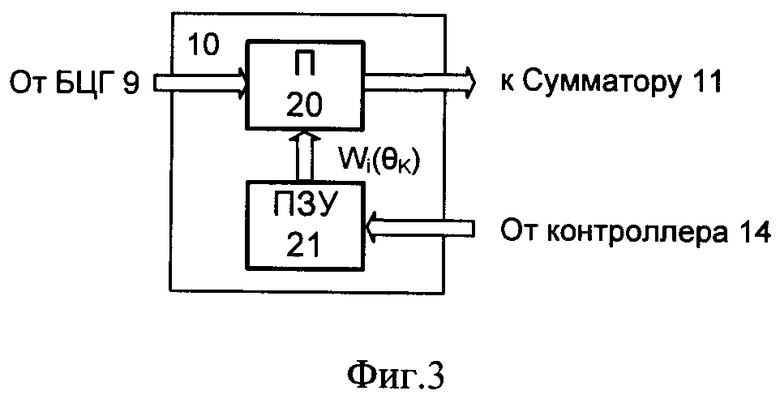
На фиг.3 приведена структурная схема блока весовых коэффициентов БВК.
На фиг.4 приведена структурная схема блока формирования луча БФЛ.
На фиг.5 приведена структурная схема блока формирования частот БФЧ.
На фиг.6 приведена структурная схема радиоприемного устройства РПУ.
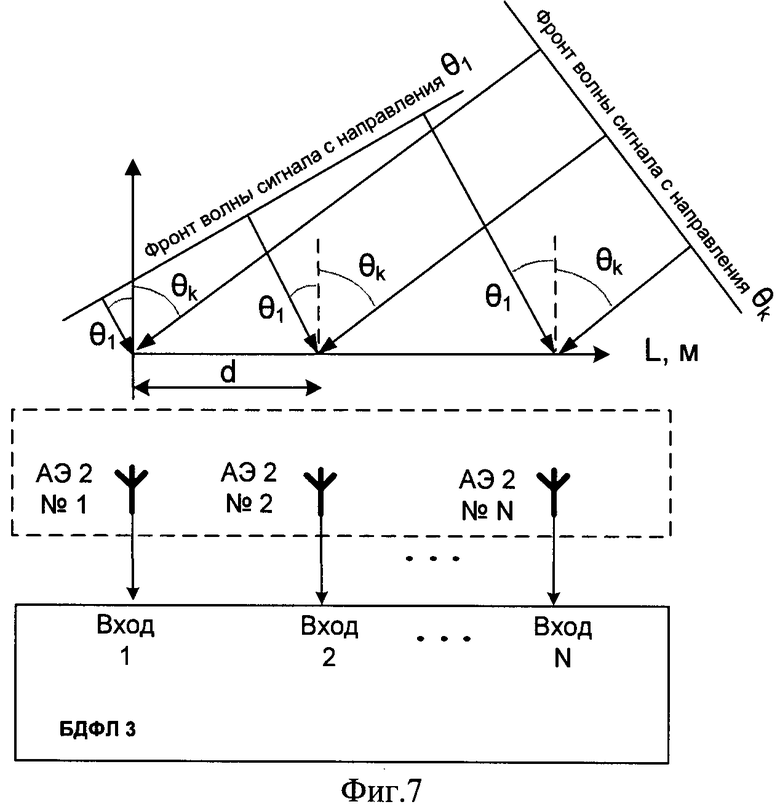
На фиг.7 приведена схема приема плоской волны от источника с азимутом θ1.
Способ формирования ДН включает в себя следующие операции:
- принимают сигналы посредством плоской антенной решетки, содержащей М рядов антенных элементов, расположенных один над другим, при этом антенные элементы в одном ряду имеют одинаковые координаты в угломестной плоскости;
- задают углы направления максимумов лучей в азимутальной θ1…θK и угломестной φ1…φК плоскостях, вычисляют весовые коэффициенты для каждого приемного канала в азимутальной плоскости и весовые коэффициенты для каждого ряда антенных элементов в угломестной плоскости, где K - число формируемых лучей;
- усиливают, фильтруют и преобразуют по частоте сигналы с выходов антенных элементов, производят синхронную дискретизацию и квантование каждого сигнала с помощью аналого-цифрового преобразователя (АЦП);
- преобразуют последовательность отсчетов с выхода каждого АЦП в последовательность квадратурных отсчетов, выполняют фильтрацию и децимацию частоты следования последовательности отсчетов в К раз;
- для каждого канала приема формируют последовательность взвешенных отсчетов путем умножения каждого квадратурного отсчета на весовые коэффициенты, соответствующие координатам лучей с 1 по К-й в азимутальной плоскости, при этом данные в полученной последовательности расположены группами по К отсчетов, относящимся к лучам с 1 по К-й, а частота следования равна частоте дискретизации;
- для каждого m-го ряда антенных элементов формируют последовательность с отсчетами парциальных лучей ДН в азимутальной плоскости путем суммирования взвешенных отсчетов каналов приема этого ряда, следующих с периодом К и относящихся к одинаковым моментам дискретизации;
- для каждого ряда формируют последовательность взвешенных отсчетов путем умножения каждого отсчета, относящегося к k-му лучу на весовые коэффициенты, соответствующие координатам лучей в угломестной плоскости;
- формируют результирующую последовательность отсчетов К лучей ДН путем суммирования взвешенных отсчетов каждого ряда, относящихся к k-му лучу, относящихся к одинаковым моментам дискретизации.
Один из вариантов устройства, реализующего предложенный способ формирования ДН (фиг.1), состоит из плоской эквидистантной антенной решетки (АР) 1, с антенными элементами АЭ 2, разделенных на М линейных подрешеток по N штук, имеющих одинаковые координаты в угломестной плоскости, М блоков дискретизации и формирования луча (БДФЛ) 3, входы управления которых подключены через магистраль управления к управляющему выходу блока управления (БУ) 4, вход сигнала гетеродина и вход сигнала дискретизации подключены к выходам блока формирования частот (БФЧ) 5, а выходы подключены к блоку формирования луча (БФЛ) 6, выход которого является выходом устройства.
БДФЛ 3 содержит N каналов, каждый из которых содержит последовательно соединенные радиоприемное устройство (РПУ) 7, АЦП 8, блок цифрового гетеродинирования (БЦГ) 9, блок весовых коэффициентов (БВК) 10. Выходы всех каналов подключены ко входам квадратурного сумматора 11, выход которого является выходом БДФЛ 3. Входы гетеродина РПУ 7 подключены к выходам первого делителя мощности 12, вход которого является первым входом опорного сигнала БДФЛ 3, входы частоты дискретизации АЦП 8 подключены к выходам второго делителя мощности 13, вход которого является вторым входом опорного сигнала БДФЛ 3.
Входы управления РПУ 7, БЦГ 9, БВК 10 подключены через магистраль управления к контроллеру 14, вход управления которого является входом управления БДФЛ 3.
М выходов сигнала гетеродина и М выходов сигнала дискретизации БФЧ 5 подключены ко входам сигнала гетеродина и сигнала дискретизации всех БДФЛ 3.
БЦГ 9 (фиг.2) включает в себя первый перемножитель 15, первый вход которого является входом блока, ко второму входу подключен синфазный выход цифрового гетеродина 16, а выход соединен со входом первого цифрового фильтра-дециматора (ЦФД) 17, выход которого является синфазной частью выхода БЦГ 9, второй перемножитель 18, первый вход которого объединен с первым входом первого перемножителя 15, ко второму входу подключен квадратурный выход цифрового гетеродина 16, а выход соединен со входом второго ЦФД 19, выход которого является квадратурной частью выхода БЦГ 9. Управляющий вход БЦГ 9 соединен с управляющими входами цифрового гетеродина 16, первого 17 и второго ЦФД 19.
БВК 10 (фиг.3) включает в себя квадратурный перемножитель 20, первый вход которого является входом блока, а выход является выходом блока, к его второму входу подключен выход ПЗУ 21. Управляющий вход ПЗУ 21 является управляющим входом блока.
БФЛ 6 (фиг.4) включает в себя квадратурный сумматор 22, выход которого является выходом блока, ПЗУ 23, управляющий вход которого является управляющим входом блока и М перемножителей 24, первые входы которых является входами блока, ко второму входу подключены выходы ПЗУ 23, а выходы перемножителей 24 соединены со входами квадратурного сумматора 22.
БФЧ 5 (фиг.5) включает в себя первый синтезатор частот 25, выход которого подключен к третьему делителю мощности 26, второй синтезатор частот 27, управляющий вход которого является управляющим входом блока, а выход подключен к четвертому делителю мощности 28. Выходы третьего 26 и четвертого 28 делителей мощности являются выходами блока.
РПУ 7 (фиг.6) включает в себя последовательно соединенные малошумящий усилитель (МШУ) 29, вход которого является входом РПУ, смеситель 30, второй вход которого является гетеродинным входом РПУ, усилитель промежуточной частоты (УПЧ) 31, полосовой фильтр 32, выход которого является выходом РПУ.
АЭ 2 может быть выполнен в виде симметричного вибратора, например, с формой, аналогичной симметричным вибраторам в [Устройства СВЧ и антенны. Проектирование фазированных антенных решеток. Под ред. Д.И. Воскресенского, М., «Радиотехника», 2003 - стр.222, рис.2.6.1а - 2.6.1в].
АЦП 8 предназначен для преобразования принимаемого сигнала в цифровые отсчеты. Число разрядов АЦП должно быть не менее 12, что обеспечивает отношение сигнал-шум в идеальном случае 73,94 дБ [Аналого-цифровое преобразование / Под ред. У. Кестера. - М.: Техносфера. 2007 - с.103]. В реальных АЦП отношение сигнал-шум на выходе несколько меньше. Например, для АЦП типа ADS6128 производства Texas Instruments отношение сигнал шум составляет 70,1 дБ, при этом динамический диапазон по дискретным составляющим не менее 81 дБ [14/12-Bit, 250/210 MSPS ADCs With DDR LVDS and Parallel CMOS Outputs. Texas Instruments. 2009].
Квадратурные сумматоры 11 и 22 предназначены для суммирования квадратурных отсчетов сигнала, поступающих на их входы и могут быть выполнены на ПЛИС в соответствии со структурной схемой, приведенной в [Цифровые радиоприемные системы. Под ред. М.И. Жодзишского. М.: Радио и связь. 1990. - рис.2.13, стр.51].
ПЗУ 21 и 23 предназначены для хранения весовых коэффициентов 

Делители мощности 12, 13, 26 и 28 обеспечивает разветвление сигнала дискретизации Fд и гетеродина Fг на N выходов (12 и 13) и М выходов (26 и 28). Они могут быть выполнены, например, на делителях мощности производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007 - стр.55, 123]. Поскольку фирма выпускает делители с разным числом каналов от 2 до 48, конкретные типы используемых элементов определяются количеством БДФЛ 3. Если М превышает 48, то необходимо использовать последовательное разветвление входного сигнала для достижения требуемого числа каналов. Реализация многоканальных ДМ на 64 канала описана также в [Проектирование фазированных антенных решетки. Под ред. Д.И. Воскресенского. М.: Радиотехника. 2003, стр.550-551].
Цифровой гетеродин 16 предназначен для формирования квадратурного цифрового сигнала, с помощью которого производится преобразование отсчетов принимаемого сигнала в квадратурную форму и преобразование его частоты на нулевую ПЧ. Может быть выполнен на ПЛИС на основе счетчика, сумматора и ПЗУ, в котором записаны значения квадратурных составляющих сигнала гетеродина в соответствии со схемой, приведенной в [Белов Л.А. Синтезаторы частот и сигналов - М.: Сайнс-пресс, 2002. - рис.31].
Перемножители 15, 18, 20, 24 могут быть выполнены на ПЛИС в соответствии со структурной схемой, приведенной в [Цифровые радиоприемные системы. Под ред. М.И. Жодзишского. М.: Радио и связь. 1990 - рис.2.19, стр.57].
Первый 17 и второй 19 цифровые фильтры-дециматоры предназначены для фильтрации и прореживания (децимации) принятого сигнала и выполнены на основе каскадных интеграторов - гребенчатых фильтров [Лайонс Р. Цифровая обработка сигналов. М.: Бином. 2006 - стр 397-409]. В зарубежной литературе эти фильтры обычно называются CIC фильтрами.
Цифровой гетеродин 16, первый 15 и второй 18 перемножители и первый 17 и второй 19 цифровые фильтры-дециматоры, в зависимости от используемой в устройстве частоты дискретизации fд, могут быть выполнены с использованием микросхемы типа AD6620 производства фирмы Analog Devices [AD6620. 67 MSPS Digital Receive Signal Processor. Analog Devices. 2001] или на ПЛИС.
Блок управления 4 предназначен для приема внешних управляющих команд, пересылки их на контроллер 14 из состава БДФЛ 3, управления БФЛ 6 и БФЧ 5 и может быть выполнен на основе микропроцессора, аналогичного приведенному в [Цифровые фильтры и устройства обработки сигналов на интегральных микросхемах / Ф.Б. Высоцкий, В.И. Алексеев и др. М.: Радио и связь. 1987 - стр.126], или на основе микропроцессорной структуры, описанной в [Угрюмов Е. Цифровая схемотехника. Санкт-Петербург: БХВ-Петербург. 2004 - рис.5.1] или на ПЛИС. Передача данных от БУ 4 на контроллер 14 выполняется по интерфейсу последовательного типа, например CAN.
Контроллер 14 предназначен для приема управляющих команд от БУ 4 и установки параметров РПУ 7, блока цифрового гетеродинирования 9, блока весовых коэффициентов 10 и может быть выполнен на основе микропроцессора, структура аналогична приведенной в [Цифровые фильтры и устройства обработки сигналов на интегральных микросхемах / Ф.Б. Высоцкий, В.И. Алексеев и др. М.: Радио и связь. 1987 - стр.126], или на основе микропроцессорной структуры, описанной в [Угрюмов Е. Цифровая схемотехника. Санкт-Петербург: БХВ-Петербург. 2004 - рис.5.1] или на ПЛИС.
Первый 25 и второй 27 синтезаторы частот предназначены для формирования сигналов частоты дискретизации Fд и гетеродина Fг соответственно и могут быть выполнены на синтезаторах типа KSN или DSN производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007 - стр.126].
МШУ 29, УПЧ 31 предназначены для усиления принимаемого сигнала на входной частоте и на промежуточной частоте (ПЧ) соответственно и могут быть выполнены, в зависимости от входного диапазона и полосы ПЧ, на микросхемах производства фирмы Hittite [Hittite Microwave Corp. Product Selection Guide. January 2010 - стр.5-7].
Смеситель 30 предназначен для преобразования частоты принимаемого сигнала на ПЧ с помощью сигнала гетеродина может быть выполнен, в зависимости от входного диапазона, на микросхемах производства Hittite [Hittite Microwave Corp. Product Selection Guide. January 2010 - стр.13-14].
ПФ 32 предназначен для фильтрации входного сигнала перед аналого-цифровым преобразованием в АЦП 8 и может быть выполнен, например, на микросхемах типа BPF производства фирмы Mini-Circuits [Mini-Circuits. IF/RF Components Guide. 2007 - стр.107] или на дискретных элементах по схеме, аналогичной приведенной в [Проектирование радиоприемных устройству /Под ред. А.П. Сиверса. М.: Советское радио. 1976 - стр.283-287].
Устройство, реализующее предложенный способ формирования ДН (фиг.1), работает следующим образом.
Формирование ДН выполняется в два этапа - вначале в блоках БДФЛ 3 формируются ДН в азимутальной плоскости из сигналов на выходах отдельных подрешеток с углами направления лучей θ1…θK.
На фиг.7 показано поступление на линейную подрешетку фронта плоской волны от источников сигналов с азимутами θ1 и θК. Антенные элементы АЭ 2 в подрешетке расположены в одну линию с одинаковым расстоянием d друг от друга, например с d=λ/2,
где λ=c/Fвx - длина волны принимаемого сигнала,
Fвx - частота входного сигнала,
с - скорость света.
Поскольку направление на источник сигнала находится под углом θk относительно перпендикуляра к плоскости подрешетки, то электромагнитная волна на разные АЭ 2 будет приходить с разной фазой. Относительная фаза принимаемого сигнала от k-го источника на n-м входе БДФЛ 3, n=1…N, имеет вид:

где kФ=2π/λ - фазовая постоянная пространства.
Для того чтобы сформировать направление луча диаграммы направленности (ДН) линейной решетки в направлении k-го источника сигнала, необходимо суммировать сигналы с выходов антенных элементов после выравнивания моментов их поступления путем сдвига по фазе на величину (1). Отсчеты сигнала, поступающие на n-й вход каждого БДФЛ 3 умножаются на свой взвешивающий множитель, содержащий сдвиг по фазе в соответствии с (1) и множитель An, определяющий амплитудное распределение

При поступлении сигнала на входы БДФЛ 3 в каждом канале он усиливается, фильтруется и преобразуется по частоте в РПУ 7. Полосовой фильтр в ПФ 32 должен обеспечивать отсутствие «наложений» сигнала при аналого-цифровом преобразовании, то есть полоса пропускания ΔFРПУ должна быть не менее чем в два раза меньше частоты дискретизации ΔFРПУ<Fд/2. [Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь. 1987 - с.42]. Для удешевления РПУ 7 в нем используется фильтр с более широкой полосой пропускания ΔFРПУ, чем полоса спектра сигнала ΔFc.
Далее сигнал в каждом канале в АЦП 8 преобразуется в последовательность отсчетов Sn(i) (здесь i - номер отсчета в последовательности). Далее отсчеты проходят на блок цифрового гетеродинирования БЦГ 9, где действительные отсчеты преобразуются в последовательность комплексных (квадратурных) отсчетов 
Для формирования направлений лучей ДН в направлениях θ1…θK каждый поступающий на n-й вход БДФЛ 3 отсчет последовательно умножается в квадратурном перемножителе 20 из состава БВК 10 на K комплексных весовых коэффициентов 

Отсчеты с N выходов БВК 10 суммируются в квадратурном сумматоре 11, при этом между собой складываются отсчеты, следующие с периодом К и относящиеся к одинаковым моментам дискретизации. Каждый отсчет в последовательности на выходе квадратурного сумматора 11 с учетом операций в БВК 10 вычисляется по формуле:


Последовательность отсчетов сформированных лучей в азимутальной плоскости с угловыми координатами θ1…θK расположены группами по К и имеет вид … 


Операция (3) выполняется во всех БДФЛ 3, таким образом на их выходах формируются М последовательностей 
Формирование лучей в угломестной плоскости из последовательностей на выходах блоков БДФЛ 3 производится в БФЛ 6. В перемножителях 24 (фиг.4) отсчеты умножаются на весовые коэффициенты 

Отсчеты лучей в последовательности на выходе устройства размещены последовательно группами по К отсчетов. В сумматоре 22 после операции сложения производится масштабирование разрядности полученных отсчетов до 16 разрядов.
Работа устройства, реализующего предложенный способ, выполняется в режиме конвейера: в каждом блоке БДФЛ 3 после обработки i-го отсчета он передается далее и начинается обработка следующего i+1-го отсчета. Для исключения пропусков отсчетов, поступающих с А ЦП 8, время выполнения всех операций в каждом блоке, включая пересылку данных до следующего не должно превышать промежуток времени Тд=1/Fд между отсчетами.
Требуемое быстродействие блоков можно оценить по допустимому времени выполнения всех операций в одном блоке Топ в зависимости от числа лучей как

Преимуществом предлагаемого способа с последовательным формированием лучей является возможность увеличения числа лучей без увеличения объема аппаратуры. Современные быстродействующие ПЛИС обеспечивают формирование требуемого числа лучей при обработке узкополосных сигналов.
В отличие от этого в прототипе для увеличения числа лучей требуется увеличение числа блоков формирования лучей, что увеличивает количество связей между блоками, вес и энергопотребление аппаратуры.
Для проверки работоспособности предлагаемого способа он был проверен на макете устройства диаграммообразования. Испытания показали совпадение полученных характеристик с расчетными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| Способ обзора пространства | 2016 |
|
RU2621680C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 1993 |
|
RU2072525C1 |
| Способ обзора пространства | 2015 |
|
RU2610833C1 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| Способ обзора пространства | 2017 |
|
RU2666763C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ построения системы диаграммообразования активной фазированной антенной решётки | 2019 |
|
RU2731604C1 |
| Способ диаграммообразования в проемной цифровой антенной решетке | 2021 |
|
RU2766536C1 |



Использование: изобретение относится к антенной технике и предназначено для построения диаграммы направленности фазированных антенных решеток из состава антенных устройств систем радиосвязи или радиолокационных устройств. Сущность: в способе принимают сигналы посредством плоской антенной решетки, содержащей М рядов антенных элементов, расположенных один над другим, при этом антенные элементы в одном ряду имеют одинаковые координаты в угломестной плоскости, задают углы направления максимумов лучей в азимутальной θ1…θK и угломестной φ1…φK плоскостях, вычисляют весовые коэффициенты для каждого приемного канала в азимутальной плоскости и весовые коэффициенты для каждого ряда антенных элементов в угломестной плоскости, где К - число формируемых лучей, производят синхронную дискретизацию и квантование каждого сигнала с выхода каждого из антенных элементов. Преобразуют последовательность отсчетов с выхода каждого АЦП в последовательность квадратурных отсчетов, выполняют фильтрацию и децимацию частоты следования последовательности в К раз. Для каждого канала приема формируют последовательность взвешенных отсчетов путем умножения каждого квадратурного отсчета на весовые коэффициенты, соответствующие координатам лучей с 1 по K-й в азимутальной плоскости. Для каждого m-го ряда антенных элементов формируют последовательность с отсчетами парциальных лучей ДН в азимутальной плоскости путем суммирования взвешенных отсчетов каналов приема этого ряда, следующих с периодом К и относящихся к одинаковым моментам дискретизации. Для каждого ряда формируют последовательность взвешенных отсчетов путем умножения каждого отсчета, относящегося к k-му лучу, на весовые коэффициенты, соответствующие координатам лучей в угломестной плоскости. Формируют результирующую последовательность отсчетов К лучей ДН путем суммирования взвешенных отсчетов каждого ряда, относящихся к k-му лучу, относящихся к одинаковым моментам дискретизации. Технический результат: устранение зависимости объема аппаратуры от количества формируемых лучей и формирование многолучевой диаграммы направленности с независимым управлением лучами. 7 ил.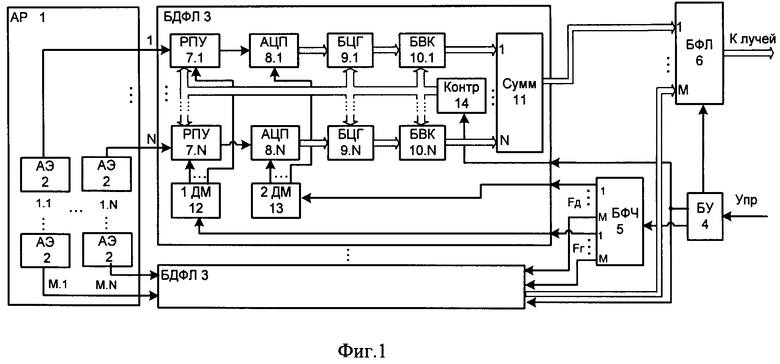
Способ формирования диаграммы направленности, заключающийся в приеме сигнала посредством плоской антенной решетки, дискретизации выходных сигналов элементов антенной решетки, формировании лучей диаграммы направленности раздельно в азимутальной и угломестной плоскостях, причем формирование диаграммы направленности в угломестной плоскости производится посредством весового суммирования выборок, полученных из выходных сигналов тех элементов антенной решетки, которые имеют одинаковые координаты в угломестной плоскости, затем производят формирование набора лучей в угломестной плоскости, отличающийся тем, что задают углы направления максимумов лучей в азимутальной θ1…θК и угломестной φ1…φК плоскостях, где К - число формируемых лучей, формируют потоки цифровых отсчетов из аналоговых сигналов на выходах антенных элементов путем синхронной дискретизации по времени и квантования по амплитуде, преобразуют последовательность отсчетов с выходов элементов антенной решетки в последовательность квадратурных отсчетов, выполняют фильтрацию и децимацию полученных последовательностей отсчетов в К раз, формируют для каждого канала приема последовательность взвешенных отсчетов путем умножения каждого квадратурного отсчета на весовые коэффициенты, соответствующие координатам лучей с 1 по К-й в азимутальной плоскости, при этом данные в полученной последовательности располагают группами по К отсчетов, относящимся к лучам с 1 по К-й, а частота следования равна частоте дискретизации, формируют для каждого m-го ряда антенных элементов последовательность с отсчетами парциальных лучей диаграммы направленности в азимутальной плоскости путем суммирования взвешенных отсчетов каналов приема этого ряда, следующих с периодом К и относящихся к одинаковым моментам дискретизации, формируют для каждого ряда последовательность взвешенных отсчетов путем умножения каждого отсчета, относящегося к k-му лучу на весовые коэффициенты, соответствующие координатам лучей в угломестной плоскости, формируют результирующую последовательность отсчетов К лучей диаграммы направленности путем суммирования взвешенных отсчетов каждого ряда, относящихся к k-му лучу, относящихся к одинаковым моментам дискретизации.
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 1993 |
|
RU2072525C1 |
| US 2004196172 A1, 07.10.2004 | |||
| US 7880675 B1, 01.02.2011 | |||
| US 2002171585 A1, 21.11.2002 | |||
| RU 2009105328 A, 27.08.2010. | |||

