Изобретение относится к радиолокационной технике, а именно к способам обзора пространства, и предназначено для использования в радиолокационных системах (РЛС) с цифровыми антенными решетками (ЦАР).
Известен способ обзора пространства [1 - стр. 39 - Обработка сигналов в многоканальных РЛС / Под ред. А.П. Лукошкина. М.: Радио и связь. 1983. - 328 с.] путем параллельного обзора по всем измеряемым координатам с помощью многолучевой РЛС, при этом формируются перекрывающиеся лучи диаграммы направленности (ДН), охватывающие всю зону обзора.
Недостатками известного способа являются избыточные ресурсы, которые требуются для формирования параллельных лучей по всем измеряемым координатам.
Известен способ обзора пространства [2 - стр. 233 - Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио. 1975 - 336 с.], в котором формируется многолучевая ДН в угломестной плоскости за счет облучения зеркальной антенны несколькими излучателями (рупорами), при этом линейка излучателей расположена в угломестной плоскости и зафиксирована относительно оси зеркала, каждый излучатель соединен со своим приемопередатчиком отдельным фидером и формирует парциальный луч на своей несущей частоте. Прием отраженных сигналов каждым излучателем также осуществляется на своей частоте. Сканирование по азимуту осуществляется механическим вращением антенны.
Недостатками известного способа обзора пространства являются:
- низкий кпд передающей части устройства за счет больших потерь излучаемого и принимаемого сигнала в фидерах, соединяющих излучатели (рупоры) и приемопередающие каналы, поскольку они значительно разнесены в пространстве;
- недостаточно высокая надежность, поскольку при выходе из строя одного приемопередатчика обзор пространства становится невозможен в том секторе угломестного обзора, который обеспечивал этот приемопередатчик.
Наиболее близким по технической сущности к изобретению является способ обзора пространства [3 - Способ обзора пространства и сопровождения объектов поверхности при маловысотном полете - Патент РФ 2211459, опубл. 27.08.2003], взятый за прототип, заключающийся в том, что обнаружение объектов включает последовательную обработку данных в дискретном времени с привязкой к каждому текущему такту tn обработки, полученных при обзоре пространства с использованием веерной диаграммы направленности и занимающей М положений по горизонтали и диаграммы направленности с игольчатой формой, зондирующей отдельные выбранные участки зоны обзора с малым периодом обзора, при этом обе диаграммы направленности формируются одной антенной системой с электронным управлением лучом.
К недостаткам прототипа следует отнести:
- большое время обзора, так как измерение координат объекта выполняется в два этапа: вначале используется веерная ДН в режиме приема и передачи, при этом производится грубое измерение координат объекта, а для уточнения координат дополнительно используется ДН с игольчатой формой, что значительно удлиняет время обзора при увеличении числа объектов;
- недостаточную точность измерения координат объекта, поскольку для измерения используется единственная ДН с игольчатой формой, и метод максимума [2 - стр. 87].
Задачей, на решение которой направлено предлагаемое изобретение, является уменьшение времени обзора и повышение точности измерения координат объектов.
Для решения указанной задачи предлагается способ обзора пространства, при котором последовательно обрабатывают данные в дискретном времени с привязкой к каждому азимутальному положению диаграммы направленности, при этом обзор пространства осуществляют веерной диаграммой направленности, последовательно занимающей М положений по азимуту, и диаграммой направленности игольчатой формы, при этом обе диаграммы направленности формируют одной антенной системой с электронным управлением лучом.
Согласно изобретению для формирования передающей и приемной диаграмм направленности используют многоэлементную цифровую антенную решетку, при этом в каждом азимутальном положении диаграммы направленности в режиме передачи при формировании веерной передающей диаграммы направленности в угломестной плоскости зондирующий сигнал усиливают в твердотельном усилителе мощности, встроенном в каждый приемопередающий канал цифровой антенной решетки, и передают его по соединительной цепи минимальной длины на подключенный к этому каналу антенный элемент, в режиме приема отраженные сигналы, принимаемые с выхода каждого антенного элемента, представляют в виде цифровых отсчетов, из которых путем взвешенного суммирования формируют приемную многолучевую в угломестной плоскости диаграмму направленности, каждый луч которой имеет игольчатую форму, при этом соседние лучи перекрываются по уровню половинной мощности, а ширина приемной и передающей диаграмм направленности соответствует угловому размеру зоны обнаружения в угломестной плоскости, выполняют обнаружение объектов, измерение их дальности и угломестной координаты моноимпульсным методом обработки сигналов каждой из соседних пар приемных лучей.
Техническим результатом предлагаемого способа является уменьшение времени обзора и повышение точности измерения координат объектов.
Проведенный сравнительный анализ заявленного способа и прототипа показывает, что их отличие заключается в следующем:
- в прототипе обзор пространства осуществляется в два этапа - грубое определение с помощью веерной ДН и уточнение с помощью сканирования единственной ДН игольчатой формы. Эти действия необходимо выполнять последовательно в реальном времени. При этом для уточнения координат нескольких объектов необходимо последовательно сканировать игольчатой ДН в нескольких областях пространства, что занимает тем больше времени, чем больше объектов. В предлагаемом способе обзор пространства осуществляется в один этап, а за счет формирования многолучевой ДН, каждый луч которой имеет игольчатую форму, а соседние лучи перекрываются по уровню половинной мощности, измерение координат всех объектов обеспечивается сразу для всех объектов, за счет чего уменьшается время обзора;
- в прототипе уточнение координат объекта осуществляется с помощью сканирования ДН игольчатой формы с применением метода максимума. В предлагаемом способе используется моноимпульсная обработка сигналов каждой из соседних пар приемных лучей сформированной многолучевой ДН, что обеспечивает значительное снижение ошибки измерения [2 - стр. 91] по сравнению с методом максимума, применяемом в прототипе.
Сочетание отличительных признаков и свойства предлагаемого способа обзора пространства из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
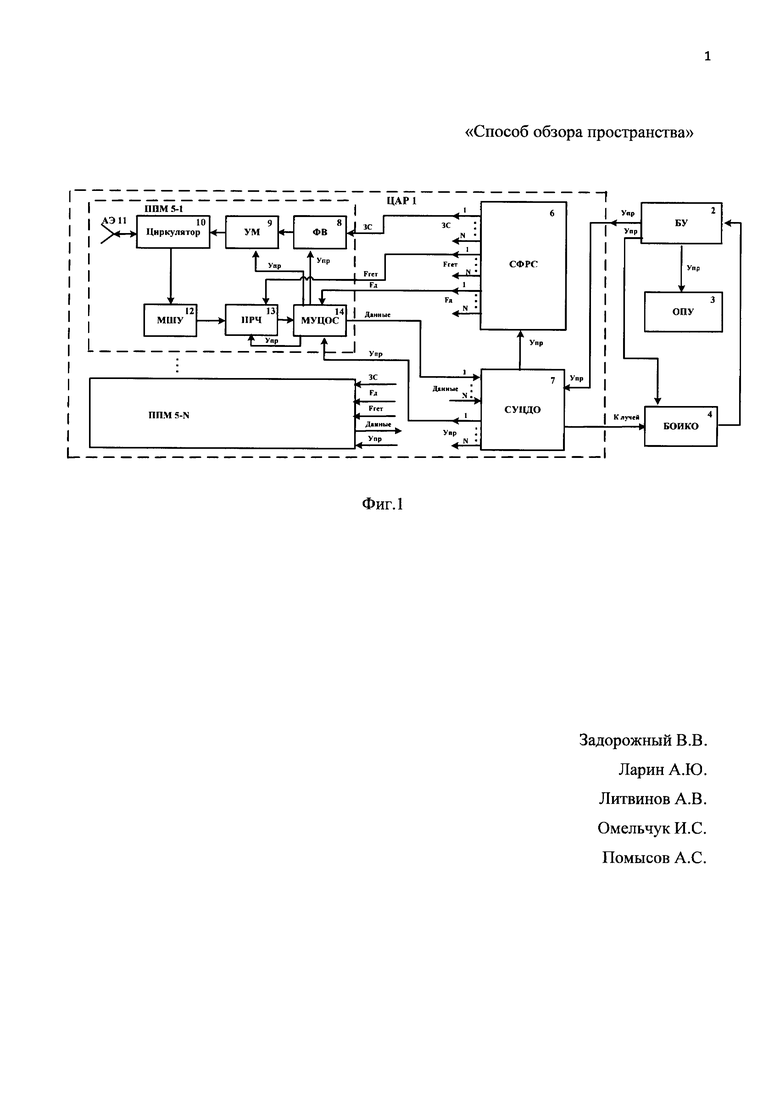
На фиг. 1. приведена структурная схема устройства, обеспечивающего реализацию предложенного способа.
На фиг. 2. приведена структурная схема системы управления и цифрового диаграммообразования.
На фиг. 3. приведена структурная схема преобразователя частоты.
На фиг. 4. приведена структурная схема модуля управления и цифровой обработки сигналов.
При реализации предложенного способа выполняется следующая последовательность действий:
- в каждом азимутальном положении диаграммы направленности в режиме передачи формируют веерную передающую диаграмму направленности в угломестной плоскости с помощью многоэлементной цифровой антенной решетки, при этом зондирующий сигнал усиливают в твердотельном усилителе мощности, встроенном в каждый приемопередающий канал цифровой антенной решетки, и его передают по соединительной цепи минимальной длины на подключенный к этому каналу антенный элемент - 1;
- в режиме приема отраженные сигналы, принимаемые с выхода каждого антенного элемента, представляют в виде цифровых отсчетов - 2;
- из полученных цифровых отсчетов формируют приемную многолучевую в угломестной плоскости диаграмму направленности путем взвешенного суммирования, каждый луч которой имеет игольчатую форму, при этом соседние лучи перекрываются по уровню половинной мощности, а ширина приемной и передающей диаграмм направленности соответствует угловому размеру зоны обнаружения в угломестной плоскости - 3;
- выполняют обнаружение объектов, измерение их дальности и угломестной координаты с использованием моноимпульсного метода обработки сигналов каждой из соседних пар приемных лучей – 4;
- устанавливают следующее азимутальное положение диаграммы направленности и выполняют перечисленные операции для этого положения - 5.
Предложенный способ может работать как при электронном сканировании ДН по азимуту при неподвижной цифровой антенной решетке (ЦАР), так и при сканировании ДН по азимуту за счет механического перемещения (вращения) ЦАР.
Реализация предложенного способа обзора пространства возможна, например, с помощью устройства, включающего в себя (фиг. 1) ЦАР 1, блок управления (БУ) 2, первый управляющий выход которого подключен к управляющему входу ЦАР 1, второй управляющий выход - ко входу управления опорно-поворотного устройства (ОПУ) 3, третий управляющий выход - к управляющему входу блока обнаружения и измерения координат объектов (БОИКО) 4, а вход - к выходу БОИКО 4.
ЦАР 1 включает в себя N приемопередающих модулей (ППМ) 5, систему формирования и распределения сигналов (СФРС) 6 и систему управления и цифрового диаграммообразования (СУЦДО) 7.
СФРС 6 имеет N выходов зондирующего сигнала (ЗС), соединенных со входами ЗС ППМ 5, N выходов дискретизации Fд, соединенных со входами дискретизации ППМ 5, N выходов гетеродина Fгет, соединенных с гетеродинными входами ППМ 5.
ППМ 5 содержат последовательно соединенные фазовращатель (ФВ) 8, твердотельный усилитель мощности (УМ) 9, циркулятор 10 и антенный элемент (АЭ) 11. К выходу циркулятора 10 подключены последовательно соединенные малошумящий усилитель (МШУ) 12, преобразователь частоты (ПРЧ) 13, гетеродинный вход которого является гетеродинным входом ППМ 5, и модуль управления и цифровой обработки сигналов (МУЦОС) 14, вход дискретизации которого является входом дискретизации ППМ 5.
Выход данных МУЦОС 14 является выходом данных ППМ 5 и соединен с одним из N входов данных СУЦДО 7, управляющий вход МУЦОС 14 является управляющим входом ППМ 5 и соединен с одним из N управляющих выходов СУЦДО 7. Первый, второй и третий управляющие выходы МУЦОС 14 соединены соответственно с управляющими входами ПРЧ 13, УМ 9 и фазовращателя 8. Выход данных СУЦДО 7 соединен со входом данных БОИКО 4.
СУЦДО 7 (фиг. 2) имеет К формирователей 15 по числу формируемых лучей, каждый из которых содержит N каналов, при этом входы i-х каналов в формирователях 15 объединены. Каждый канал формирователя 15 содержит перемножитель 16, первый вход которого является входом канала, ко второму входу подключен выход постоянного запоминающего устройства (ПЗУ) 17, а выход перемножителя 16 является выходом канала и подключен к одному из N входов цифрового сумматора 18, выход которого подключен к одному из К входов интерфейса (И) 19. Выход интерфейса 19 является выходом СУЦДО 7. Устройство управления (УУ) 20, вход которого является управляющим входом СУЦДО 7, имеет N+1 управляющих выходов, которые являются управляющими выходами СУЦДО 7. Все блоки СУЦДО 7 могут быть выполнены в зависимости от числа ППМ 5 и числа лучей К в виде одной или нескольких программируемых логических интегральных схем (ПЛИС).
ПРЧ 13 (фиг. 3) представляет собой последовательно соединенные смеситель (СМ) 21, вход которого является входом ПРЧ 13, а гетеродинный вход - гетеродинным входом ПРЧ 13, и усилитель промежуточной частоты (УПЧ) 22, выход которого является выходом промежуточной частоты (ПЧ) ПРЧ 13, а управляющий вход - управляющим входом ПРЧ 13.
МУЦОС 14 (фиг. 4) представляет собой последовательно соединенные аналого-цифровой преобразователь (АЦП) 23, вход которого является входом ПЧ МУЦОС 14, а тактовый вход является входом дискретизации МУЦОС 14, и блок управления и обработки (БУО) 24. Первый, второй и третий управляющие выходы БУО 24 являются соответственно первым, вторым и третьим управляющим выходами МУЦОС 14. Выход данных и управляющий вход БУО 24 являются соответственно выходом данных и управляющим входом МУЦОС 14.
СФРС 6 представляет собой три синтезатора частоты, обеспечивающих формирование зондирующего сигнала ЗС, сигнала тактовой частоты дискретизации Fд и сигнала гетеродина Fгет. При этом могут быть использованы, например, синтезаторы из [4 - стр. 142-143. Mini-Circuits. RF & Microwave components guide. 2010]. Сформированные в синтезаторах сигналы разветвляются на N выходов с помощью делителей мощности [4 - стр. 136-140].
БОИКО 4 представляет собой ЭВМ, обеспечивающую обработку отсчетов сигнала по заданному алгоритму.
БУ 2 представляет собой ЭВМ, обеспечивающую управление работой устройств ЦАР 1, ОПУ 3 и БОИКО 4, а также отображение координат обнаруженных объектов.
ОПУ 3 представляет собой устройство, обеспечивающее вращение ЦАР 1 в азимутальной плоскости, и может быть выполнено на основе опорно-поворотного круга с подшипником и червячного вала с электромотором.
Устройство может работать как при электронном сканировании ДН по азимуту при неподвижной ЦАР 1, так и при сканировании ДН по азимуту за счет механического вращения ЦАР 1 с помощью ОПУ 3. Сектор сканирования по азимуту в первом случае ограничивается характеристиками ЦАР 1, а во втором случае равен 360°.
В каждом азимутальном положении ДН в режиме передачи формируют веерную передающую диаграмму направленности в угломестной плоскости с помощью ЦАР 1. Формирование передающей ДН производится путем установки в ППМ 5 из состава ЦАР 1 требуемых фазовых и амплитудных соотношений регулировкой сдвига фазы зондирующего сигнала ЗС в фазовращателях 8 и коэффициента усиления усилителей мощности УМ 9.
Для случая плоской прямоугольной ЦАР, апертура которой содержит Nx АЭ 11, установленных вдоль координаты X на расстоянии dx, и Ny АЭ 11, установленных вдоль координаты Y, на расстоянии dy, диаграмма направленности F(ϕ,θ) определяется как [5 - стр. 27-28, Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - КВИЦ. 2000]:

где 

где Axi, Ayi - коэффициенты амплитудного распределения в УМ 9, соединенных с АЭ 11, которые расположены вдоль координат X и Y соответственно;
ψxi ψyi - коэффициенты фазового распределения, представленные в виде фазовых сдвигов в фазовращателях 8, соединенных через УМ 9 и циркулятор 10 с АЭ 11, которые расположены вдоль координат X и Y соответственно.
Для наземных обзорных РЛС веерная ДН может иметь косекансную форму [6 - рис. 5.1 б - Бакулев П.А. Радиолокационные системы. М.: Радиотехника. 2007. - 376 с.]. Такая форма ДН формируется путем установки соответствующих амплитудных и фазовых коэффициентов в усилителях мощности 9 и фазовращателях 8, например, как описано в [7 - Лопатенко Э.В., Марусич А.А. Диаграмма направленности антенны cosec с низким уровнем боковых лепестков. // Радиотехника, 2006, №12, с. 49-53.].
После усиления зондирующего сигнала ЗС в УМ 9 он поступает на подключенный к этому каналу антенный элемент (АЭ) 11 по соединительной цепи минимальной длины.
После излучения зондирующего сигнала ЗС ЦАР 1 переходит в режим приема.
В режиме приема принимаемые отраженные сигналы с выхода каждого АЭ 11 в каждом ППМ 5 проходят через циркулятор 10, усиливаются в МШУ 12, преобразуются по частоте в ПРЧ 13 и представляются в виде цифровых отсчетов Smn(t) с помощью АЦП 23.
Из полученных цифровых отсчетов формируют приемную многолучевую в угломестной плоскости ДН с лучами игольчатой формы путем взвешенного суммирования в СУЦДО 7. Отсчеты i-го луча с направлением максимума ϕi, θi вычисляются путем умножения цифрового потока с каждого АЦП 23 в перемножителях 16 на весовой множитель Wmn(ϕi,θi) из ПЗУ 17 и суммирования в цифровом сумматоре 18. Диаграмма направленности для i-го луча имеет вид

где 
Число лучей К определяется требуемой зоной обзора в угломестной плоскости и шириной одного луча. Лучи приемной многолучевой ДН имеют игольчатую форму, расположены в угломестной плоскости, при этом направления их максимумов обеспечивает перекрытие соседних лучей по уровню половинной мощности. Ширина приемной диаграммы направленности соответствует угловому размеру зоны обнаружения в угломестной плоскости.
Сформированные отсчеты К приемных лучей с выходов формирователей 15 поступают в интерфейс 19, где преобразуются в последовательную форму и в виде последовательных кодов передаются в БОИКО 4, где в каждой из соседних пар сформированных приемных лучей выполняется обнаружение объектов, например, движущихся, измерение их дальности и угломестных координат, соответствующих угломестному положению тех приемных лучей, в которых они были обнаружены [8, стр. 185-189 - Справочник по радиолокации / Под ред. М.И. Сколника. М.: Техносерв, 2014. т. 1].
Многолучевая в угломестной плоскости ДН обеспечивает ускорение обзора пространства за счет одновременного обнаружения объектов и измерения их координат в широком угломестном секторе обзора. В то время как в прототипе измерение координат объекта выполняется в два этапа: вначале используется веерная ДН в режиме приема и передачи, при этом производится грубое измерение координат объекта, а для уточнения координат дополнительно используется одна ДН игольчатой формы. Двухэтапный поиск прототипа занимает более длительное время, чем в предлагаемом способе, за счет введения дополнительных команд по установке луча ЦАР, загрузки весовых коэффициентов формирования луча и т.д. Время обзора пространства в прототипе тем больше, чем больше объектов, координаты которых необходимо уточнить.
Применение в предлагаемом способе для измерения угломестных координат нескольких лучей дает возможность использовать равносигнальный метод пеленгации, который обеспечивает значительное снижение ошибки измерения [2 - стр. 91] по сравнению с методом максимума, применяемым в прототипе.
Применение ЦАР с N приемопередающими модулями, содержащими твердотельные усилители мощности, расположенными в непосредственной близости от антенных элементов, обеспечивает снижение потерь передаваемого и принимаемого сигналов за счет уменьшения длины соединений с антенным элементом. Повышение надежности многоэлементной ЦАР обеспечивается за счет медленного снижения характеристик ЦАР при выходе из строя части приемопередающих модулей.
Работоспособность предлагаемого способа была проверена на макете устройства (фиг. 1). Испытания показали совпадение полученных характеристик с расчетными.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора пространства | 2016 |
|
RU2621680C1 |
| Способ обзора пространства | 2017 |
|
RU2666763C1 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| Способ измерения угловых координат целей радиолокационной станцией с цифровой антенной решеткой | 2019 |
|
RU2697662C1 |
| Способ построения активной фазированной антенной решётки | 2019 |
|
RU2697194C1 |
| Способ построения активной фазированной антенной решетки | 2019 |
|
RU2717258C1 |
| Способ построения активной фазированной антенной решетки | 2020 |
|
RU2730120C1 |
| Способ формирования диаграммы направленности цифровой антенной решеткой | 2016 |
|
RU2627958C1 |

Изобретение относится к радиолокации и предназначено для построения обзорных радиолокационных станций с цифровыми антенными решетками. Достигаемый технический результат - уменьшение времени обзора и повышение точности измерения координат объектов. Согласно способу в каждом азимутальном положении диаграммы направленности в режиме передачи цифровая антенная решетка формирует веерную передающую диаграмму направленности в угломестной плоскости, в режиме приема принимаемые отраженные сигналы с выходов антенных элементов представляются в виде цифровых отсчетов, из которых путем взвешенного суммирования формируется приемная многолучевая в угломестной плоскости диаграмма направленности с лучами игольчатой формы, при этом соседние лучи перекрываются по уровню половинной мощности, при обнаружения объектов, измерении их дальности и угломестной координаты используется моноимпульсный метод обработки сигналов каждой из соседних пар приемных лучей, при этом азимутальной координатой обнаруженных объектов является текущее азимутальное положение диаграммы направленности. 4 ил.
Способ обзора пространства, включающий последовательную обработку данных в дискретном времени с привязкой к каждому азимутальному положению диаграммы направленности, при этом обзор пространства осуществляют веерной диаграммой направленности, последовательно занимающей M положений по азимуту, и диаграммой направленности игольчатой формы, при этом обе диаграммы направленности формируют одной антенной системой с электронным управлением лучом, отличающийся тем, что для формирования передающей и приемной диаграмм направленности используют многоэлементную цифровую антенную решетку, при этом в каждом азимутальном положении диаграммы направленности в режиме передачи при формировании веерной передающей диаграммы направленности в угломестной плоскости зондирующий сигнал усиливают в твердотельном усилителе мощности, встроенном в каждый приемопередающий канал цифровой антенной решетки и передают его по соединительной цепи минимальной длины на подключенный к этому каналу антенный элемент, в режиме приема отраженные сигналы, принимаемые с выхода каждого антенного элемента, представляют в виде цифровых отсчетов, из которых путем взвешенного суммирования формируют приемную многолучевую в угломестной плоскости диаграмму направленности, каждый луч которой имеет игольчатую форму, при этом соседние лучи перекрываются по уровню половинной мощности, а ширина приемной и передающей диаграмм направленности соответствует угловому размеру зоны обнаружения в угломестной плоскости, выполняют обнаружение объектов, измерение их дальности и угломестной координаты моноимпульсным методом обработки сигналов каждой из соседних пар приемных лучей.
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ ПОВЕРХНОСТИ ПРИ МАЛОВЫСОТНОМ ПОЛЕТЕ | 2001 |
|
RU2211459C2 |
| Способ получения препарата плесневых грибков | 1946 |
|
SU82044A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ЗОНЫ ПРОСТРАНСТВА (ВАРИАНТЫ) | 2008 |
|
RU2405168C2 |
| US 6005531 A, 21.12.1999 | |||
| US 7071868 B2, 04.07.2006 | |||
| US 20110291890 A1, 01.12.2011 | |||
| WO 2008105458 A1, 04.09.2008. | |||

