ОБЛАСТЬ ТЕХНИКИ
В соответствии с первым объектом настоящее изобретение относится к устройству для изменения наклона лопасти импеллера/пропеллера.
В соответствии со своим вторым объектом настоящее изобретение относится к вентилятору, содержащему первый объект.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым объектом предложено устройство для изменения наклона лопасти импеллера/пропеллера. Устройство содержит по меньшей мере один линейный приводной механизм, имеющий первую и вторую части, которые являются подвижными относительно друг друга, при этом указанный по меньшей мере один приводной механизм является винтовой парой. Оно дополнительно содержит первый подшипник, установленный на невращающемся механическом элементе при жестком соединении с первой частью. Второй подшипник установлен на второй части, обеспечивающей относительное осевое перемещение между первым подшипником и вторым подшипником, причем привод относительного осевого перемещения осуществляется от указанного по меньшей мере одного линейного приводного механизма. Между опорной конструкцией вала ротора и невращающимся механическим элементом установлен первый подшипник, допускающий относительный поворот между опорной конструкцией и указанным по меньшей мере одним линейным приводным механизмом. Между второй частью и рычажным средством, имеющим точку вращения на опорной конструкции, установлен второй подшипник. Рычажное средство является прикрепляемым к лопасти с возможностью относительного изменения наклона лопасти. Во время работы указанного по меньшей мере одного линейного приводного механизма вторая часть перемещается в осевом направлении, приводя к угловому перемещению рычажного средства, вызывающему изменение наклона лопасти. Кроме того, во время работы указанного по меньшей мере одного линейного приводного механизма возникает сила, которая воздействует на невращающийся механический элемент таким образом, что вал ротора не подвержен действию этой силы.
Преимущество основано на том, что указанный по меньшей мере один приводной механизм не вращается, поскольку он установлен на невращающемся механическом элементе. Это приводит к тому, что этот по меньшей мере один приводной механизм, включая электродвигатель, компоненты и подсистемы, которые могут быть необходимы для обмена средой или сигналами с техническим окружением, не вращается, а потому проблемы, связанные со сложными устройствами, необходимыми для привода в движение линейного приводного механизма, исключаются, то есть нет необходимости подводить к вращающимся частям электропитание, находящееся под давлением гидравлическое масло или воздух пневматической системы. Другим преимуществом является уменьшение проблем, связанных с балансировкой. В поворотном линейном приводном механизме могут возникать проблемы инерции отклонения во вращающихся частях. Таким образом, сведение к минимуму количества вращающихся частей делает вращающуюся систему более сбалансированной, также и с точки зрения уменьшения массы, которая при этом будет вращаться.
Другим преимуществом является то, что во время работы указанного по меньшей мере одного линейного приводного механизма не существует осевой силы, воздействующей на вал ротора, поскольку эта сила вместо него действует на невращающийся элемент. Например, она воздействует на конструкцию подшипникового узла, несущего вал ротора. В одном варианте исполнения невращающийся механический элемент прикреплен, например, посредством стержня или штанги к стационарному окружению устройства, например к стене, к крыше, к земле или любому другому элементу, который расположен рядом с этим устройством. В одном варианте исполнения невращающийся механический элемент проходит через отверстие в оси вала ротора, и невращающийся элемент прикреплен к стационарному элементу на другом конце вала ротора.
В одном варианте исполнения устройство дополнительно содержит третий подшипник в опорной конструкции для поддержки рычажного средства при его колебательных перемещениях. В одном варианте исполнения на этом месте расположено несколько подшипников. Это приводит к повышенной возможности управления перемещением лопасти в нужное положение. Кроме того, наличие третьего подшипника приведет к уменьшению потребляемой энергии при изменении наклона лопасти.
В одном варианте исполнения вал ротора и опорная конструкция выполнены как единое целое.
В одном варианте исполнения первый и второй подшипники могут справляться с комбинированной осевой и радиальной нагрузкой. Радиальной нагрузкой при этом будет по крайней мере нагрузка, соответствующая собственному весу этой части устройства. Однако в зависимости от конкретной ситуации может возникнуть дополнительная необходимость противостоять более высоким радиальным нагрузкам. Во время работы указанного по меньшей мере одного приводного механизма рычажное средство будет совершать колебательные перемещения, которые приведут к возникновению осевой нагрузки на первый и второй подшипники. Специалисты в данной области техники в состоянии подобрать соответствующие подшипники, способные выдержать комбинацию осевой и радиальной нагрузки, если характеристики этой нагрузки известны. Кроме того, объему настоящего изобретения соответствует возможное использование вместо одного подшипника в качестве первого подшипника и в качестве второго подшипника эквивалентных подшипниковых узлов. Это, например, означает, что первый подшипник может быть заменен одним подшипником, способным противостоять радиальной нагрузке, и другим подшипником, способным противостоять осевой нагрузке. Кроме того, это означает, что второй подшипник может быть заменен одним подшипником, способным противостоять радиальной нагрузке, и другим подшипником, способным противостоять осевой нагрузке.
В одном варианте исполнения предполагается также, что подшипниковый узел способен противостоять нагрузке перекоса и изгибающему моменту.
В одном варианте исполнения устройство дополнительно содержит направляющее средство между второй частью и вторым подшипником. В одном варианте исполнения направляющее средство выполнено с возможностью скольжения в осевом направлении относительно невращающегося элемента. В одном варианте исполнения направляющее средство имеет такую форму, при которой оно по меньшей мере частично окружает невращающийся механический элемент. В этих вариантах исполнения может быть один линейный приводной механизм или большее количество линейных приводных механизмов, используемых для перемещения направляющего средства в осевом направлении. В одном варианте исполнения между внутренней поверхностью направляющего средства и невращающимся механическим элементом имеется средство уменьшения трения.
В одном варианте исполнения линейный подшипник является частью направляющего средства.
В одном варианте исполнения невращающийся механический элемент представляет собой нераздельную часть первой части. Таким образом, первый подшипник прикреплен к первой части.
В вариантах исполнения линейный приводной механизм является приводным механизмом одного из типов линейных приводных механизмов - гидравлического, пневматического или механического.
В одном варианте исполнения линейный приводной механизм является либо винтовым, либо роликовым винтовым, либо шариковым винтовым.
В одном варианте исполнения указанный по меньшей мере один линейный приводной механизм представляет собой множество линейных приводных механизмов. Это предоставляет возможность замены более совершенного линейного приводного механизма двумя или большим количеством более простых линейных приводных механизмов. Кроме того, наличие более одного линейного приводного механизма делает конструкцию более устойчивой постольку, поскольку она сможет еще оставаться работоспособной, даже если один линейный приводной механизм выйдет из строя.
В одном варианте исполнения множество линейных приводных механизмов расположено через равные углы вокруг периферийной поверхности невращающегося механического элемента.
В одном варианте исполнения множество линейных приводных механизмов расположено через неравные углы вокруг периферийной поверхности вала ротора.
В одном варианте исполнения устройство в случае электромеханического линейного приводного механизма дополнительно содержит зубчатую передачу, прикрепленную к приводному винту с возможностью установки на электродвигатель. Это предоставляет преимущественную возможность установки электродвигателя, например, под углом в 90° относительно осевого направления устройства, например, из соображений экономии пространства.
В одном варианте исполнения плечо рычага дополнительно содержит средство для управления дополнительной лопастью, расположенной на расстоянии от лопасти в осевом направлении. В вентиляторе нередко имеется два набора лопастей, отстоящих один от другого в направлении воздушного потока. Это дает то преимущество, заключающееся в возможности изменения наклона одной лопасти из первого набора лопастей и второй лопасти из второго набора лопастей с использованием указанного по меньшей мере одного линейного приводного механизма.
В соответствии со вторым объектом предложен вентилятор. Он содержит ротор, имеющий ступицу, к которой прикреплено с возможностью разворота множество лопастей, при этом вентилятор содержит устройство в соответствии с первым объектом. Признаки по первому объекту применимы к признакам по второму объекту, и наоборот.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
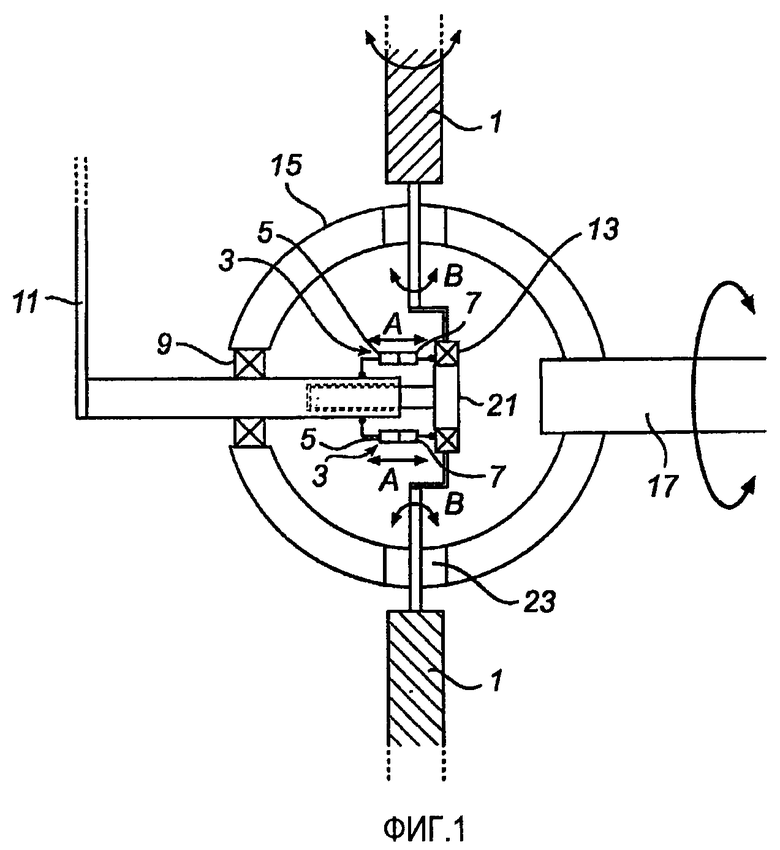
На фиг.1 представлена условная иллюстрация первого варианта исполнения устройства.
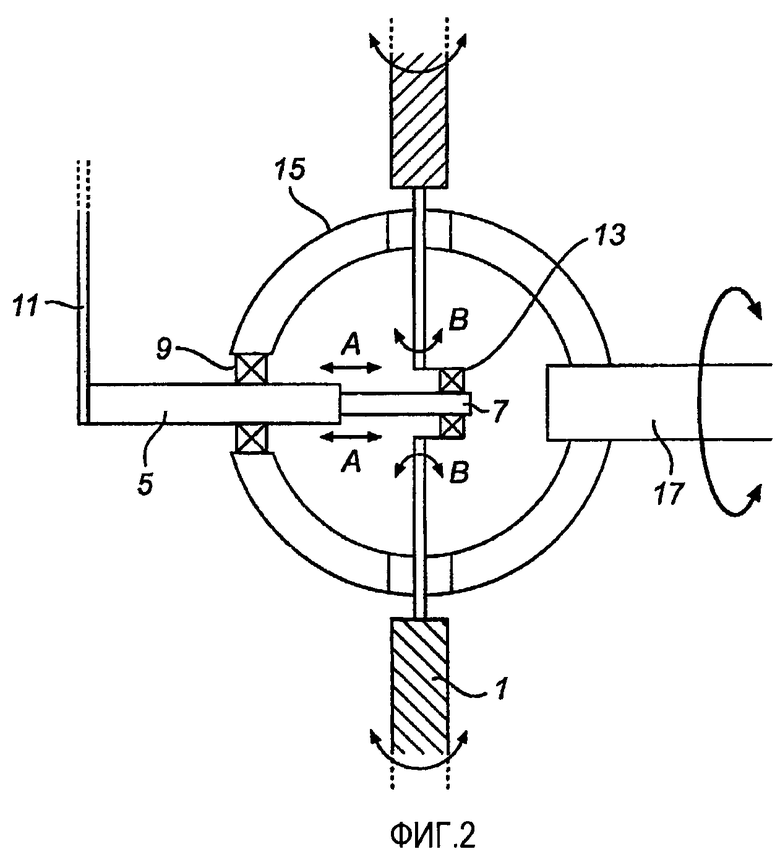
На фиг.2 представлена условная иллюстрация второго варианта исполнения устройства.
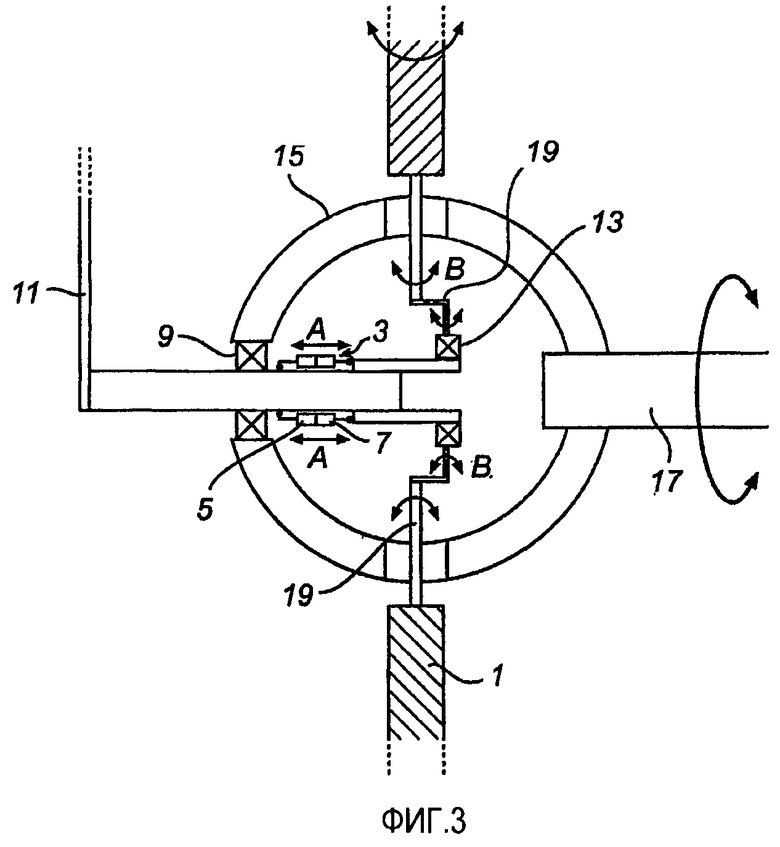
На фиг.3 представлена условная иллюстрация третьего варианта исполнения устройства.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 показан вариант исполнения устройства для изменения наклона лопасти импеллера/пропеллера. Устройство в соответствии с этим вариантом исполнения содержит по меньшей мере один приводной механизм. Вариант исполнения, показанный на фиг.1, содержит два линейных приводных механизма 3. Каждый линейный приводной механизм 3 имеет первую и вторую части 5, 7, которые выполнены с возможностью перемещения относительно друг друга. В этом варианте исполнения линейные приводные механизмы 3 имеют конфигурацию винтовой пары. На невращающемся механическом элементе установлен первый подшипник 9, жестко соединенный с первой частью 5, а на второй части 7 установлен второй подшипник 13. Это обеспечивает относительное осевое перемещение между первым подшипником 9 и вторым подшипником 13. Относительное осевое перемещение осуществляется указанным по меньшей мере одним линейным приводным механизмом 3. Между опорной конструкцией вала ротора и невращающимся механическим элементом установлен первый подшипник 9, допускающий относительный поворот между опорной конструкцией и указанным по меньшей мере одним линейным приводным механизмом. Между второй частью 7 и рычажным средством, имеющим точку вращения на опорной конструкции 15, установлен второй подшипник 13. Рычажное средство через отверстие 23 в опорной конструкции 15 является прикрепляемым к лопасти 1 с возможностью относительного наклона лопасти. Во время работы указанного по меньшей мере одного линейного приводного механизма вторая часть 7 перемещается в осевом направлении (показанном на фиг.1 стрелками, обозначенными "A"), приводя к угловому перемещению рычажного средства (показанному на фиг.1 стрелками, обозначенными "B"), вызывая изменение в наклоне лопасти 1. Кроме того, во время работы указанного по меньшей мере одного линейного приводного механизма 3 возникает сила, которая воздействует на невращающийся элемент таким образом, чтобы данная сила на вал 17 ротора не действовала.
Первый и второй подшипники могут противостоять комбинированной осевой и радиальной нагрузке.
В одном варианте исполнения имеется направляющее средство 21, которое закреплено на втором подшипнике 13. Это направляющее средство 21 предназначено для направления перемещения второго подшипника 13. В одном варианте исполнения вторая часть 7 прикреплена к направляющему средству 21. В другом варианте исполнения вторая часть 7 прикреплена ко второму подшипнику 13.
В одном варианте исполнения указанное устройство дополнительно содержит третий подшипник в опорной конструкции для поддержки рычажного средства при его колебательных перемещениях.
В одном варианте исполнения вал 17 ротора и опорная конструкция 15 выполнены как единое целое.
В одном варианте исполнения невращающийся механический элемент 11 является нераздельной частью первой части 5.
В одном варианте исполнения линейный приводной механизм является приводным механизмом одного из типов линейных приводных механизмов - гидравлического, пневматического или механического.
В одном варианте исполнения линейный приводной механизм является либо винтовым, либо роликовым винтовым, либо шариковым винтовым.
В одном варианте исполнения указанный по меньшей мере один линейный приводной механизм представляет собой множество линейных приводных механизмов, которые расположены через равные углы по периферийной поверхности невращающегося механического элемента.
В одном варианте исполнения плечо рычага дополнительно содержит средство, например, добавочное плечо, продолжающееся таким образом, что входит во взаимодействие с дополнительной лопастью и управляет ею, возможно, посредством соединения между добавочным плечом и дополнительной лопастью, расположенной на некотором расстоянии от лопасти в осевом направлении.
На фиг.2 показан вариант исполнения устройства для изменения наклона лопасти импеллера/пропеллера. Устройство содержит по меньшей мере один приводной механизм, который имеет первую и вторую части 5 и 7, которые выполнены с возможностью перемещения относительно друг друга. На первой части 5 установлен первый подшипник 9, а на второй части 7 установлен второй подшипник 13, что допускает относительное осевое перемещение между первым подшипником 9 и вторым подшипником 13. Привод этого относительного осевого перемещения осуществляется указанным по меньшей мере одним линейным приводным механизмом. Первый подшипник установлен между опорной конструкцией 15 вала 17 ротора и первой частью 5 с возможностью относительного поворота между опорной конструкцией 15 и указанным по меньшей мере одним линейным приводным механизмом. Второй подшипник 13 установлен между второй частью 7 и рычажным средством, имеющим точку вращения на опорной конструкции. Рычажное средство является прикрепляемым к лопасти 1 с возможностью относительных колебательных поворотов лопасти. В варианте исполнения это устройство содержит лопасть 1. Во время работы указанного по меньшей мере одного линейного приводного механизма вторая часть 7 перемещается в осевом направлении (показанном на фиг.1 стрелками, обозначенными "A"), приводя к колебательному перемещению рычажного средства (показанному на фиг.1 стрелками, обозначенными "B"), вызывая изменение в наклоне лопасти 1.
В одном варианте исполнения устройство дополнительно содержит третий подшипник в опорной конструкции для поддержки рычажного средства при его колебательном перемещении.
В одном варианте исполнения вал 17 ротора и опорная конструкция 15 представляют собой единое целое.
В одном варианте исполнения первый и второй подшипники 9 и 13 могут противостоять комбинированной осевой и радиальной нагрузке.
В одном варианте исполнения линейный приводной механизм является приводным механизмом одного из типов линейных приводных механизмов - гидравлического, пневматического или механического.
В одном варианте исполнения линейный приводной механизм является либо винтовым, либо роликовым винтовым, либо шариковым винтовым. В этом варианте исполнения указанный по меньшей мере один линейный приводной механизм является единственным линейным приводным механизмом.
В одном варианте исполнения плечо рычага дополнительно содержит средство для управления дополнительной лопастью, расположенной на некотором расстоянии от лопасти в осевом направлении.
На фиг.3 показан вариант исполнения устройства. Устройство содержит по меньшей мере один линейный приводной механизм 3, имеющий первую и вторую части 5 и 7, которые выполнены подвижными относительно друг друга. На невращающемся механическом элементе 11, жестко соединенном с первой частью 5, установлен первый подшипник 9. На второй части 7 установлен второй подшипник 13, при этом имеется возможность относительного осевого перемещения между первым подшипником 9 и вторым подшипником 13. Привод этого относительного осевого перемещения осуществляется указанным по меньшей мере одним линейным приводным механизмом 3. Первый подшипник 9 установлен между опорной конструкцией 15 вала ротора и невращающимся механическим элементом 11 с возможностью относительного поворота между опорной конструкцией 15 и указанным по меньшей мере одним линейным приводным механизмом.
Второй подшипник 13 установлен между второй частью 7 и рычажным средством, имеющим точку вращения на опорной конструкции 15. Рычажное средство 19 является прикрепляемым к лопасти 1 с возможностью относительных колебательных поворотов лопасти. Во время работы указанного по меньшей мере одного линейного приводного механизма 3 вторая часть 7 перемещается в осевом направлении (показанном на фиг.1 стрелками, обозначенными "А"), приводя к колебательному перемещению рычажного средства 19 (показанному на фиг.1 стрелками, обозначенными "В"), вызывая изменение в наклоне лопасти 1. В варианте исполнения устройство дополнительно содержит третий подшипник на опорной конструкции 15 для поддержки рычажного средства при его колебательном перемещении.
В одном варианте исполнения вал ротора и опорная конструкция представляют собой единое целое.
В одном варианте исполнения первый и второй подшипники могут противостоять комбинированной осевой и радиальной нагрузке.
В одном варианте исполнения устройство дополнительно содержит направляющее средство между второй частью и вторым подшипником. Это направляющее средство выполнено с возможностью скольжения в осевом направлении относительно невращающегося элемента. В одном варианте исполнения направляющее средство имеет такую форму, при которой оно по меньшей мере частично окружает невращающийся механический элемент.
В одном варианте исполнения линейный приводной механизм является приводным механизмом одного из типов линейных приводных механизмов - гидравлического, пневматического или механического.
В одном варианте исполнения линейный приводной механизм является либо винтовым, либо роликовым винтовым, либо шариковым винтовым.
В одном варианте исполнения указанный по меньшей мере один линейный приводной механизм представляет собой множество линейных приводных механизмов, которые расположены через равные углы вокруг периферийной поверхности невращающегося механического элемента.
В одном варианте исполнения плечо рычага дополнительно содержит средство для управления дополнительной лопастью, расположенной на некотором расстоянии от лопасти в осевом направлении.
В соответствии со вторым объектом вентилятор содержит ротор, имеющий ступицу, к которой прикреплено с возможностью поворота множество лопастей или крыльев, при этом вентилятор содержит устройство в соответствии с любым описанным ранее вариантом исполнения.
Предложено устройство для изменения наклона лопасти импеллера/пропеллера. Оно содержит по меньшей мере один линейный приводной механизм. На неповоротном механическом элементе с первым участком установлен первый подшипник, а второй подшипник установлен на второй участок, обеспечивающий относительное осевое перемещение между этим первым подшипником и вторым подшипником. Первый подшипник установлен между опорной конструкцией поворотного вала и неповоротным механическим элементом, допуская относительный поворот между опорной конструкцией и по меньшей мере одним линейным приводным механизмом. Второй подшипник установлен между вторым участком и рычажным средством, имеющим точку вращения на опорной конструкции. Во время работы по меньшей мере одного линейного приводного механизма второй участок перемещается в осевом направлении, приводя к угловому перемещению рычажного средства, вызывающему изменение наклона лопасти, и во время работы по меньшей мере одного линейного приводного механизма возникает сила, которая воздействует на неповоротный элемент таким образом, что поворотный вал не подвержен действию этой силы. Кроме того, предложен вентилятор, содержащий это устройство. Изобретение направлено на упрощение конструкции устройства. 2 н. и 13 з.п. ф-лы, 3 ил.
1. Устройство для изменения наклона лопасти импеллера/пропеллера, имеющего вал ротора с опорной конструкцией, содержащее:
- по меньшей мере один линейный приводной механизм, имеющий первую и вторую части, которые являются подвижными относительно друг друга, при этом указанный по меньшей мере один линейный приводной механизм является винтовой парой;
- невращающийся механический элемент, жестко соединенный с первой частью;
- первый подшипник, установленный на невращающемся механическом элементе, при этом первый подшипник установлен между опорной конструкцией вала ротора и невращающимся механическим элементом, обеспечивая относительное вращение между опорной конструкцией и указанным по меньшей мере одним линейным приводным механизмом;
- второй подшипник, установленный на второй части, что допускает возможность относительного осевого перемещения между первым подшипником и вторым подшипником, причем привод указанного относительного осевого перемещения осуществляется от указанного по меньшей мере одного линейного приводного механизма; и
- рычажное средство, имеющее точку поворота на опорной конструкции, при этом второй подшипник установлен между второй частью и рычажным средством, а рычажное средство является прикрепляемым к лопасти с возможностью относительного изменения наклона лопасти;
при этом во время работы по меньшей мере одного линейного приводного механизма вторая часть перемещается в осевом направлении, приводя к угловому перемещению рычажного средства, вызывающему изменение наклона лопасти; и
- во время работы по меньшей мере одного линейного приводного механизма возникает сила, которая воздействует на неповоротный элемент таким образом, что вал ротора не подвержен действию этой силы.
2. Устройство по п.1, дополнительно содержащее третий подшипник в опорной конструкции для поддержки рычажного средства при его колебательных перемещениях.
3. Устройство по п.1, в котором поворотный вал и опорная конструкция выполнены как единое целое.
4. Устройство по п.1, в котором первый и второй подшипники могут противостоять комбинированной осевой и радиальной нагрузке.
5. Устройство по п.1, дополнительно содержащее направляющее средство между вторым участком и вторым подшипником.
6. Устройство по п.5, в котором направляющее средство выполнено с возможностью скольжения в осевом направлении относительно невращающегося механического элемента.
7. Устройство по п.5, в котором направляющее средство имеет такую форму, при которой оно по меньшей мере частично окружает невращающийся механический элемент.
8. Устройство по п.1, в котором неповоротный механический элемент представляет собой единое целое с первой частью.
9. Устройство по п.1, в котором линейный приводной механизм является линейным приводным механизмом одного из типов линейных приводных механизмов - гидравлического, пневматического или механического.
10. Устройство по п.1, в котором линейный приводной механизм является либо винтовым, либо роликовым винтовым, либо шариковым винтовым.
11. Устройство по п.1, в котором по меньшей мере один линейный приводной механизм представляет собой множество линейных приводных механизмов.
12. Устройство по п.11, в котором множество линейных приводных механизмов расположено через равные углы вокруг периферийной поверхности неповоротного механического элемента.
13. Устройство по п.11, в котором множество линейных приводных элементов расположено через неравные углы вокруг периферийной поверхности вала ротора.
14. Устройство по п.1, в котором плечо рычага дополнительно содержит средство для управления дополнительной лопастью, расположенной на расстоянии от указанной лопасти в осевом направлении.
15. Вентилятор, содержащий ротор, имеющий ступицу, к которой прикреплено с возможностью поворота множество лопастей или крыльев, при этом вентилятор содержит устройство по любому из пп.1-14.
| ВСЕСОЮЗНАЯP^T'i'T'-'-q --rr-j.'. .•" • ч:I:;-* i i-i! >& !i'j" : i Ai.'i-; .'' fi) | 0 |
|
SU361982A1 |
| US 1347377 A, 20.07.1920 | |||
| US 2850106 A, 02.09.1958 | |||
| Механизм поворота рабочих лопаток осевого реверсивного вентилятора | 1985 |
|
SU1268824A1 |
| Устройство для поворота лопастей осевого вентилятора | 1973 |
|
SU567850A1 |

