Сведения о приоритете
[0001] В соответствии с § 119(e) раздела 35 Кодекса законов США настоящая заявка претендует на приоритет по предварительной патентной заявке США №61/649,741, поданной 21 мая 2012 г., и по предварительной патентной заявке США №61/799,878, поданной 15 марта 2013 г., обе из которых в в полном объеме включены в настоящее описание посредством ссылки.
Предпосылки создания изобретения
[0002] Изобретение имеет отношение к летательным аппаратам, в частности, к беспилотным летательным аппаратам (БПЛА). Более конкретно изобретение имеет отношение к беспилотным винтокрылым летательным аппаратам.
[0003] Винтокрылые летательные аппараты используются для различных целей. Беспилотные винтокрылые летательные аппараты широко используются военными организациями, правоохранительными органами и в коммерческой деятельности для воздушной разведки.
Сущность изобретения
[0004] Беспилотный винтокрылый летательный аппарат по настоящему изобретению содержит корпус, содержащий продолговатый трубчатый остов или трубчатый каркас, и систему соосных несущих винтов противоположного направления вращения, содержащую несущие винты, причем для приведения во вращение несущих винтов вокруг общей оси вращения несущих винтов каждый несущий винт имеет отдельный двигатель. Для подачи электрической энергии на двигатели предусмотрен источник электропитания, содержащий, например, батарею, топливный элемент или гибридный газоэлектрогенератор. Передача энергии на системы несущих винтов и между ними осуществляется преимущественно с использованием электропроводки вместо механической системы валов. Описана модульная конструкция, которая способствует технологичности изготовления.
[0005] В примере варианта осуществления настоящего изобретения предусмотрен трубчатый вал, предназначенный для передачи механической энергии внутри невращающегося трубчатого остова, образующего модульную конструкцию колонки, которая может быть использована в качестве опоры для соосных систем несущих винтов на летательных аппаратах многих видов.
[0006] В примерах вариантов осуществления настоящего изобретения система управления шагом лопасти расположена между лопастями несущего винта. Между верхним и нижним несущими винтами могут быть предусмотрены неподвижная невращающаяся обшивка корпуса или аэродинамический обтекатель для защиты системы управления шагом и каркаса летательного аппарата от воздействия внешней среды и для снижения аэродинамического лобового сопротивления летательного аппарата.
[0007] В примерах вариантов осуществления предусмотрен вспомогательный энергоблок, который является отделимым от летательного аппарата в полете, чтобы, например, обеспечить летательному аппарату возможность долететь в удаленную точку. В другом варианте осуществления настоящего изобретения упомянутый энергоблок содержит также полезный груз, такой как боеприпасы, погружаемый гидролокатор, гидрофоны, или отделяемый модуль радиогидроакустического буя.
Несмотря на то, что аспекты изобретения применимы ко многим вертолетам, включая полноразмерные вертолеты, транспортирующие людей, настоящее изобретение особенно хорошо приспособлено для использования в автономных или радиоуправляемых винтокрылых летательных аппаратах, известных как дистанционно пилотируемые летательные аппараты (ДПЛА) или беспилотные летательные аппараты (БПЛА).
[0008] Особенности настоящего изобретения будут понятны специалистам в этой отрасли при рассмотрении примеров вариантов осуществления настоящего изобретения, показывающих воспринимаемые в настоящее время как наилучшие варианты исполнения настоящего изобретения.
Краткое описание фигур
[0009] В приведенном подробном описании сделаны конкретные ссылки на прилагаемые фигуры, на которых:
[0010] Фиг. 1 представляет собой схематическое изображение винтокрылого летательного аппарата по настоящему изобретению, на котором показан летательный аппарат, содержащий систему управления и пару систем несущего винта, присоединенных к каркасу летательного аппарата, который содержит невращающуюся основу, или невращающийся остов, и который несет полезный груз;
[0011] Фиг. 2А представляет собой вид в перспективе винтокрылого летательного аппарата по настоящему изобретению, на котором показана система соосных несущих винтов противоположного направления вращения в режиме вертикального полета;
[0012] Фиг. 2В представляет собой вид в перспективе винтокрылого летательного аппарата, показанного на Фиг. 2А и содержащего систему соосных несущих винтов противоположного направления вращения, и бустерный модуль с неподвижным крылом в режиме горизонтального полета;
[0013] Фиг. 3 представляет собой вертикальную боковую проекцию показанного на Фиг. 2А винтокрылого летательного аппарата, на котором изображены внешние панели корпуса и электропроводка, а бустерный модуль снят для наглядности;
[0014] Фиг. 4 представляет собой вид сбоку со снятыми частями показанного на Фиг. 2А летательного аппарата, на котором изображена система соосных несущих винтов противоположного направления вращения и источник электрической энергии;
[0015] Фиг. 5 представляет собой увеличенный вид в перспективе показанного на Фиг. 2А летательного аппарата со снятыми частями, на котором изображено внутреннее оборудование верхней части летательного аппарата и системы соосных несущих винтов противоположного направления вращения;
[0016] Фиг. 6 представляет собой увеличенный вид в перспективе показанного на Фиг. 2А летательного аппарата со снятыми частями, на котором изображено внутреннее оборудование нижней части летательного аппарата и системы соосных несущих винтов противоположного направления вращения;
[0017] Фиг. 7А представляет собой вид в перспективе каркасной трубы, или остова, имеющей(-его) круглое поперечное сечение и пустотелый внутренний канал, который использован в качестве канала между секциями летательного аппарата и на котором изображена электропроводка, проложенная в пустотелом внутреннем канале и входящая и выходящая в различных точках;
[0018] Фиг. 7В представляет собой вид в перспективе остова, имеющего по существу крестообразное поперечное сечение с внешними каналами, которые проходят по длине этого остова и могут быть использованы в качестве каналов между секциями летательного аппарата;
[0019] Фиг. 8 представляет собой увеличенный вид в перспективе первого кольцевого крепления;
[0020] Фиг. 9 представляет собой увеличенный вид в перспективе с пространственным разделением деталей второго кольцевого крепления, на котором изображены прикрепляемые элементы рычажных механизмов управления и опоры корпуса;
[0021] Фиг. 10 представляет собой увеличенный вид в перспективе внутреннего оборудования средней части показанного на Фиг. 2А летательного аппарата со снятыми частями, на котором изображена система соосных несущих винтов противоположного направления вращения;
[0022] Фиг. 11А представляет собой вид в перспективе с пространственным разделением деталей модуля несущего винта, содержащего лопасти несущего винта с изменяемым циклическим шагом и фиксированным общим шагом;
[0023] Фиг. 11В представляет собой вид в перспективе с пространственным разделением деталей модуля несущего винта, содержащего лопасти несущего винта с изменяемым циклическим шагом и изменяемым общим шагом;
[0024] Фиг. 12А и Фиг. 12В представляют собой виды в перспективе основания двигателя с первой стороны и со второй стороны;
[0025] Фиг. 13А и Фиг. 13В представляют собой виды в перспективе втулки несущего винта с первой стороны и со второй стороны;
[0026] Фиг. 14 представляет собой вид в разрезе;
[0027] Фиг. 15 представляет собой вид сбоку показанной на Фиг. 2А системы соосных несущих винтов противоположного направления вращения, и каркасной трубы для этой системы несущих винтов;
[0028] Фиг. 16А и Фиг. 16В представляют собой виды в перспективе с пространственным разделением деталей одиночного энергетического модуля, содержащего несколько батарей;
[0029] Фиг. 17 представляет собой вид в ортогональной проекции показанного на Фиг. 2В бустерного модуля, на котором изображено одно крыло, сложенное для хранения, и одно крыло, развернутое в полетное положение;
[0030] Фиг. 18 представляет собой вид в ортогональной проекции, на котором изображен бустерный модуль, отделяющийся в полете от винтокрылого летательного аппарата;
[0031] Фиг. 19 представляет собой вид спереди винтокрылого летательного аппарата, на котором изображена погружаемая гидролокационная станция или узел гидрофона, прикрепленная(-ый) к нижней части летательного аппарата;
[0032] Фиг. 20А, Фиг. 20В и Фиг. 20С представляют собой последовательные виды винтокрылого летательного аппарата, на которых показана работа складывающихся лопастей неодинаковой длины во время аварийной посадки летательного аппарата на грунт, находящийся ниже винтокрылого летательного аппарата;
[0033] Фиг. 21А и Фиг. 21В представляют собой последовательные виды сбоку трубы для хранения и упомянутого винтокрылого летательного аппарата, на которых показан летательный аппарат, сложенный для хранения;
[0034] Фиг. 22 представляет собой вид в перспективе винтокрылого летательного аппарата по настоящему изобретению при доставке датчика или обозначении удаленного местоположения, показанной(-ым) для случая корабля в открытом океане;
[0035] Фиг. 23 представляет собой вид сбоку винтокрылого летательного аппарата, сложенного для хранения в хвостовой части свободно падающей бомбы;
[0036] Фиг. 24 представляет собой вид в перспективе винтокрылого летательного аппарата, сбрасываемого из хвостовой части свободно падающей бомбы вблизи цели, на котором показана свободно падающая бомба, из которой в режиме вертикального полета сбрасывается винтокрылый летательный аппарат для патрулирования в районе цели для предоставления наступающим войскам данных о нанесенных в ходе боевых действий повреждениях в реальном времени после того, как свободно падающая бомба атакует цель;
[0037] Фиг. 25А представляет собой схематическое изображение другого винтокрылого летательного аппарата, и на этом изображении показан летательный аппарат, который имеет содержащую каналы для передачи энергии и сигналов центральную шину, систему управления и пару систем несущего винта, присоединенных к каркасу летательного аппарата, который содержит невращающуюся основу конструкции, или невращающийся остов, и который несет полезный груз;
[0038] Фиг. 25В представляет собой схематическое изображение показанного на Фиг. 25А винтокрылого летательного аппарата, и на этом изображении показаны система несущего винта, система управления и источник электропитания, взаимодействующие через содержащую каналы для передачи энергии и сигналов центральную шину данных/энергии;
[0039] Фиг. 26 представляет собой схематическое изображение другого варианта исполнения винтокрылого летательного аппарата по настоящему изобретению, и этот летательный аппарат имеет содержащую каналы для передачи энергии и сигналов центральную шину, систему управления и пару систем несущего винта, присоединенных к каркасу летательного аппарата;
[0040] Фиг. 27 представляет собой вид спереди винтокрылого летательного аппарата по настоящему изобретению, содержащего обтекаемый корпус, пригодный для поступательного полета на высоких скоростях, и модуль соосной колонки, который содержит внутренний трубчатый вал для приведения в действие верхнего несущего винта;
[0041] Фиг. 28 представляет собой вид спереди показанного на Фиг. 27 винтокрылого летательного аппарата с удаленными частями обшивки корпуса, чтобы открыть модуль колонки и систем управления несущим винтом;
[0042] Фиг. 29 представляет собой увеличенный вид сбоку показанного на Фиг. 28 винтокрылого летательного аппарата со срезанными частями кожуха модуля колонки и несущего винта, чтобы открыть находящиеся внутри элементы;
[0043] Фиг. 30 представляет собой вид спереди другого варианта исполнения винтокрылого летательного аппарата по настоящему изобретению, на котором изображен винтокрылый летательный аппарат, содержащий обтекаемый корпус, пригодный для поступательного полета на высоких скоростях, и модуль соосной колонки, который содержит редуктор верхнего несущего винта, и на котором видно, что части обшивки корпуса, содержащиеся в обтекаемом корпусе, сняты, чтобы сделать видимыми модуль колонки и системы управления несущим винтом;
[0044] Фиг. 31 представляет собой увеличенный вид спереди показанного на Фиг. 29 винтокрылого летательного аппарата со снятыми частями кожуха модуля колонки и несущих винтов, чтобы сделать видимыми находящиеся внутри элементы;
[0045] Фиг. 32 представляет собой вид в разрезе трубы колонки показанного на Фиг. 28 винтокрылого летательного аппарата;
[0046] Фиг. 33 представляет собой увеличенный вид в перспективе модуля сервомеханизма, содержащегося в винтокрылом летательном аппарате, на котором показано, что модуль сервомеханизма содержит три сервомеханизма и три Z-образных звена для одновременного изменения шага верхнего и нижнего несущих винтов при различных фазовых углах;
[0047] Фиг. 34 представляет собой увеличенный вид в перспективе двух автоматов перекоса для регулирования шага, содержащихся в показанном на Фиг. 33 модуле сервомеханизма, на котором изображены автоматы перекоса для регулирования шага, соединенные Z-образным звеном для приведения в действие автоматов перекоса при различных фазовых углах;
[0048] Фиг. 35 представляет собой вид сверху показанных на Фиг. 34 автоматов перекоса и Z-образного звена, на котором изображен фазовый угол автомата перекоса, составляющий приблизительно 90 градусов;
[0049] Фиг. 36 представляет собой вид с пространственным разделением деталей узла рычажного механизма управления шагом в виде Z-образного звена, показанного на Фиг. 33 и Фиг. 34;
[0050] Фиг. 37 представляет собой вид сверху винтокрылого летательного аппарата по настоящему изобретению, на котором показаны фазовый угол верхнего несущего винта (заполненная двойная стрелка) и фазовый угол нижнего несущего винта (контурная двойная стрелка) и результирующий общий фазовый угол системы несущих винтов (объединенная заполненная и контурная двойная стрелка);
[0051] Фиг. 38 представляет собой вид сбоку системы управления и энергосистемы винтокрылого летательного аппарата по настоящему изобретению, скомпонованной для летательного аппарата с одним приводным двигателем, двумя несущими винтами и толкающим винтом;
[0052] Фиг. 39 представляет собой увеличенный вид в перспективе показанного на Фиг. 38 винтокрылого летательного аппарата, на котором более подробно показан распределительный механизм главного вала и зубчатые колеса привода для несущих винтов противоположного направления вращения, а также ременной привод для толкающего винта;
[0053] Фиг. 40 представляет собой вид в перспективе с торца колонки несущего винта, имеющей внутренние проходы для трубчатого вала и электропроводки или системы трубопроводов;
[0054] Фиг. 41 представляет собой вид в перспективе с торца колонки несущего винта, имеющей внутренние проходы для трубчатого вала и шести механических рычажных механизмов ползуна;
[0055] Фиг. 42 представляет собой вид в перспективе узла колонки несущего винта, содержащего колонку несущего винта, показанную на Фиг. 41, и шесть рычажных механизмов ползуна, проходящих в шести внутренних проходах и соединенных с верхним и нижним автоматами перекоса;
[0056] Фиг. 43 представляет собой увеличенный вид в перспективе с торца показанного на Фиг. 42 узла колонки несущего винта, на котором изображены шесть рычажных механизмов ползуна автоматов перекоса, проходящих в шести внутренних проходах колонки;
[0057] Фиг. 44А представляет собой вид в перспективе рычажного механизма ползуна, скомпонованного с обращенным вниз ведомым звеном для управления нижним автоматом перекоса;
[0058] Фиг. 44В представляет собой вид в перспективе с пространственным разделением деталей рычажного механизма ползуна, скомпонованного с обращенным вниз ведомым звеном для управления верхним автоматом перекоса;
[0059] Фиг. 45 представляет собой вид сбоку в перспективе вертолета с невращающейся колонкой и шестью вращающимися сервомеханизмами, соединенными с колонкой втулками верхнего и нижнего несущих винтов, на котором для ясности сняты лопасти несущих винтов;
[0060] Фиг. 46 представляет собой увеличенный вид в перспективе с торца невращающегося узла колонки несущего винта, показанного на Фиг. 45, на котором изображены шесть вращающихся сервомеханизмов, соединенных с колонкой и соединенных с верхним и нижним автоматами перекоса шестью отдельными рычажными механизмами;
[0061] Фиг. 47 представляет собой вид в перспективе высокоскоростного вертолета по настоящему изобретению, на котором показано, что высокоскоростной вертолет содержит невращающуюся колонку, служащую опорой для кожуха аэродинамического обтекателя, расположенного между лопастями верхнего и нижнего несущих винтов, для снижения лобового сопротивления;
[0062] Фиг. 48 представляет собой увеличенный местный вид сбоку в перспективе показанного на Фиг. 47 вертолета со снятыми частями, чтобы показать невращающуюся колонку, кожух колонки, шесть линейных сервомеханизмов и другие элементы системы управления, в том числе электронное оборудование и антенны, установленные на колонке между лопастями верхнего и нижнего несущих винтов;
[0063] Фиг. 49 представляет собой увеличенный местный вид в перспективе невращающегося узла колонки показанного на Фиг. 47 вертолета, на котором изображены втулки верхнего и нижнего несущих винтов, зубчатые колеса привода верхнего и нижнего несущих винтов, а также линейные сервомеханизмы;
[0064] Фиг. 50 представляет собой вид в перспективе центральной невращающейся колонки узла колонки, показанного на Фиг. 49, со снятым ползуном колонки, чтобы более детально показать вкладные элементы электрической шины;
[0065] Фиг. 51 представляет собой вид в разрезе, выполненный по линии А-А, показанной на Фиг. 50, на котором показан трубчатый вал, расположенный внутри колонки, и показаны внешние каналы для вкладных элементов электрической шины;
[0066] Фиг. 52 представляет собой вид в перспективе показанных на Фиг. 51 вставок электрической шины;
[0067] Фиг. 53 представляет собой вид в перспективе ползуна колонки с шестью чередующимися друг с другом линейными сервомеханизмами и двумя автоматами перекоса, расположенными так, чтобы уменьшить площадь фронтальной проекции узла колонки; и
[0068] Фиг. 54 представляет собой вид сверху показанного на Фиг. 53 нижнего автомата перекоса, на котором показано взаимное расположение рычагов автомата перекоса для уменьшения площади фронтальной проекции узла колонки.
Подробное описание
[0069] Как схематически показано на Фиг. 1, винтокрылый летательный аппарат 1 последовательно содержит первый модуль 2, системы 3, 5 первого и второго несущего винта, энергетические модули 13 и 14, и второй модуль 15, соединенные на некотором расстоянии один от другого с каркасом 40 летательного аппарата, простирающимся вдоль общей оси 7. В качестве иллюстративного примера, каркас 40 летательного аппарата представляет собой продолговатый центральный остов 40 и может быть выполнен в виде пустотелой трубы или иметь крестообразное поперечное сечение. Во время работы система 3 первого несущего винта, также называемая первым несущим винтом 3, и система 5 второго несущего винта, также называемая вторым несущим винтом 5, вращаются в противоположных направлениях вокруг общей оси 7, направляя тягу в направлении 24 и создавая подъемную силу в направлении 24' для выполнения управляемого полета винтокрылого летательного аппарата 1, как показано на Фиг. 2А. Первый модуль 2 предназначен для того, чтобы вмещать различные системы управления 50', электронное оборудование 55 или полезный груз 15'. Второй модуль 15 предназначен для того, чтобы вмещать полезный груз 15' или - в некоторых вариантах осуществления настоящего изобретения - различные системы управления 50' и системы электронного оборудования 55'. Полезный груз 15' может содержать, но не ограничиваясь ими, снаряжение, датчики радиации, датчики химического контроля, приборы обнаружения биологических веществ, активные и пассивные прослушивающие устройства, видеодатчики, дополнительные источники энергии или другое оборудование для выполнения конкретных задач. Таким образом, винтокрылый летательный аппарат 1 предоставляет средство для перемещения оборудования для выполнения разведки, наблюдения, контроля или обследования в зону, представляющую интерес, для получения оттуда информации.
[0070] Как показано на Фиг. 1, Фиг. 25А и Фиг. 25В, система 3 первого несущего винта содержит первый двигатель 54, лопасти первого несущего винта 20 и первое устройство 56 управления шагом. В приведенных в качестве примера вариантах осуществления настоящего изобретения двигатель 54 представляет собой электрический двигатель, как показано, например, на Фиг. 4-6, или другое пригодное средство обеспечения энергии для вращения лопастей 20 несущего винта вокруг общей оси 7. Система 3 первого несущего винта и система 5 второго несущего винта подобны друг другу по конструкции и функционированию. Система 5 второго несущего винта содержит второй двигатель 61, лопасти 22 второго несущего винта и второе устройство 57 управления шагом. В приведенных в качестве примера вариантах осуществления настоящего изобретения двигатель 61 представляет собой электрический двигатель, как показано, например, на Фиг. 4-6, или другое пригодное средство обеспечения энергии для вращения лопастей 22 несущего винта вокруг общей оси 7. В приведенных в качестве примера вариантах исполнения электрические и электронные элементы соединены и взаимодействуют через канал 173 для электрических линий и канал 174 для электронных линий, которые вмещают соответственно линии передачи энергии и сигналов. Несмотря на то, что винтокрылый летательный аппарат 1 показан с двумя системами несущего винта, этот винтокрылый летательный аппарат 1 может содержать более чем две системы несущего винта, если это требуется техническими характеристиками и потребностями выполняемой задачи.
[0071] Как показано на Фиг. 1 и Фиг. 3, каркас 40 летательного аппарата является невращающимся и образует центральный пустотелый продолговатый остов, на котором размещены первый модуль 2, системы 3, 5 первого и второго несущего винта, энергетические модули 13 и 14 и второй модуль 15. В приведенных в качестве примера вариантах исполнения энергетические модули 13 и 14 расположены один рядом с другим между системой 5 второго несущего винта и вторым модулем 15. Поскольку каркас 40 летательного аппарата является пустотелым, энергетические модули 13, 14 могут быть электрически соединены с двигателями 54 и 61 через пустотелый остов.
[0072] В приведенных в качестве примера вариантах исполнения устройство 56 управления шагом представляет собой автомат 56' перекоса, соединенный с сервомеханизмом 58 движения вперед/назад и сервомеханизмом 59 крена для изменения циклического шага лопастей 20 несущего винта в ответ на входной сигнал от устройства 55 управления. В некоторых вариантах осуществления настоящего изобретения автомат 56' перекоса кроме того соединен с сервомеханизмом 98 общего шага для одновременного изменения шага лопастей 20 несущего винта. Аналогично устройство 57 управления шагом представляет собой автомат 57' перекоса, соединенный с сервомеханизмом 58 движения вперед/назад и сервомеханизмом 59 крена для изменения циклического шага лопастей 20 несущего винта в ответ на входной сигнал от устройства 55 управления. В некоторых вариантах осуществления настоящего изобретения автомат 57' перекоса также соединен с сервомеханизмом 98 общего шага для одновременного изменения шага лопастей 20 несущего винта. В примерах вариантов настоящего изобретения устройство 55 управления представляет собой контроллер командных сигналов, как показано, например, на Фиг. 3, или другое пригодное средство для выдачи требуемых электрических или механических управляющих воздействий на сервомеханизмы 58, 59 или 98 и двигатели 54, 61.
[0073] В приведенных в качестве примера вариантах исполнения винтокрылый летательный аппарат 1 содержит систему несущих винтов фиксированного шага, имеющую два сервомеханизма 58, 59 для управления тангажем летательного аппарата (циклическим управляющим воздействием вперед/назад, как у вертолета) или управления креном летательного аппарата (циклическим управляющим воздействием влево/вправо, как у вертолета). Сервомеханизм 98, показанный на Фиг. 1 пунктиром, может быть установлен аналогично сервомеханизмам 58, 59, если необходимо управление общим шагом. В вариантах осуществления, имеющих систему несущих винтов фиксированного шага, системы 3, 5 несущего винта соединены с автоматами 56', 57' перекоса звеньями 119 рычажного механизма управления шагом. Сервомеханизмы 58, 59 соединены с автоматами 56', 57' перекоса звеньями 125, 126 управления шагом. Одна из особенностей настоящего изобретения состоит в том, что винтокрылый летательный аппарат 1 может осуществлять полет с одним или двумя сервомеханизмами циклического шага (сервомеханизмы 58, 59). В режиме полета "с одним сервомеханизмом" разница крутящих моментов двигателей 54, 61 управляет направлением путевого движения, а сервомеханизм 58 управляет полетом вперед-назад. Всего лишь с одним сервомеханизмом циклического шага винтокрылый летательный аппарат 1, также называемый летательным аппаратом 1, может осуществлять полет, более подобный полету самолета, имеющему управление только рулем направления и высоты. В показанном для пояснения режиме полета "с двумя сервомеханизмами" сервомеханизмы 58, 59 обеспечивают тангаж летательного аппарата вперед/назад и крен летательного аппарата вправо/влево разницей крутящих моментов двигателей 54, 61, обеспечивающих управление путевым движением.
[0074] В процессе работы втулки 101 несущих винтов вращаются в противоположных направлениях. Сервомеханизмы 58, 59 управляются бортовой электроникой управления полетом с одновременным наклоном автомата 56' перекоса и автомата 57' перекоса, которые затем циклически изменяют угол шага лопасти вращающихся лопастей 20 несущего винта для наклона летательного аппарата 1 в одном из направлений: тангажа 170 летательного аппарата и крена 171 летательного аппарата. В другом варианте осуществления настоящего изобретения (показан на Фиг. 11В), с общим шагом несущего винта, сервомеханизм 98 общего шага и третье звено управления шагом (не показаны) обеспечивают изменение осевого положения автоматов 56', 57' перекоса вдоль общей оси 7 и изменение общего шага лопастей 20, 22 несущего винта с использованием электронной системы микширования общего и циклического шага (Collective-Cyclic Pitch Mixing, (ССРМ)). При суммировании общего и циклического шага сервомеханизмы 58, 59 и 98 синхронно отклоняют автоматы 56', 57' перекоса, изменяя циклический шаг, и синхронно перемещают автоматы 56', 57' перекоса в осевом направлении вдоль общей оси 7, изменяя общий шаг.
[0075] В этом примере варианта осуществления настоящего изобретения использован двигатель с изменяемой частотой вращения для регулирования рыскания (курса полета) в конфигурации для вертикального полета. Обычно в вертолетах соосной схемы используют изменяемый шаг лопасти и различные углы установки лопасти для регулирования рыскания в полете. В настоящем изобретении разница крутящих моментов, создаваемых работающими двигателями 54, 61 при различных частотах вращения относительно неподвижного корпуса летательного аппарата 1, создает усилия вращения вокруг вертикальной оси для обеспечения устойчивости и регулирования движения рыскания (то есть вращением вокруг общей оси 7). По этому способу крутящий момент (и в конечном счете частота вращения) двигателя 54 увеличивается или уменьшается в зависимости от движения рыскания винтокрылого летательного аппарата 1 вокруг общей вертикальной оси 7. Крутящий момент (частота вращения) второго двигателя 61 регулируется автоматически бортовой вычислительной системой, содержащейся в устройстве 55 управления, в отличие от крутящего момента (частоты вращения) первого двигателя 54, поддерживающего постоянную подъемную силу таким образом, что винтокрылый летательный аппарат 1 не набирает и не теряет высоту.
[0076] Лопасти 20 и 21 несущего винта соединены с винтокрылым летательным аппаратом 1, также называемым винтокрылым воздушным судном 1, и установлены с возможностью вращения на втулки 101 несущих винтов. Втулки 101 несущих винтов для обеспечения возможности поворота присоединены к внутренней поворачивающей системе 108, как показано лучше всего на Фиг. 11А. Поворотные оси 109 проходят через втулку несущего винта 101 и входят в поворачивающую систему 108. Поворачивающая система 108 выполнена так, чтобы соединять пару лопастей несущего винта с втулкой несущего винта 101 для вращения вокруг общей оси 7. Поворачивающая система 108 соединена с первым концом пары звеньев 119 управления шагом. Каждое звено 119 управления шагом соединено на втором конце с внешней стороной автомата 56' перекоса или автомата 57' перекоса. Поэтому поворачивающая система 108 поворачивается входным воздействием автомата 56', 57' перекоса, которое вызвано прямолинейным входным воздействием сервомеханизмов 58, 59 или 98. Это движение поворачивания поворачивающей системы 108 в свою очередь вызывает поворачивание каждой лопасти 20, 22 несущего винта, тем самым увеличивая или уменьшая шаг лопасти несущего винта лопастей 20, 22 несущих винтов.
[0077] Как показано на Фиг. 2А и Фиг. 2В, винтокрылый летательный аппарат 1 содержит верхнюю секцию 2', первый несущий винт 3 и второй несущий винт 5, среднюю секцию 4, нижнюю секцию 6, первый и второй энергетические модули 13, 14 и полезный груз 15', расположенные на некотором расстоянии один от другого вдоль общей оси 7. Как показано на Фиг. 2А-4, внутренние механические и электрические элементы, расположенные внутри верхней секции 2' и средней секции 4 летательного аппарата 1, закрыты тонкостенной обшивкой 10 верхней части корпуса и обшивкой 11 средней части корпуса, соответственно. Обшивка 12 нижней части корпуса покрывает часть нижней секции 6, однако может быть увеличена, чтобы покрывать всю нижнюю секцию 6. Одна из особенностей настоящего изобретения состоит в том, что обшивки 10, 11 корпуса изготовлены посредством инжекционно раздувного формования из пластмассы, такой как поликарбонат или акрилонитрил-бутадиен-стирол (АБС), и в сочетании с остовом 40 образуют конструкцию винтокрылого летательного аппарата, содержащую прочный центральный элемент и тонкий элемент внешней обшивки, которые вместе являются жесткими, прочными и простыми в изготовлении.
[0078] Как показано на Фиг. 3, винтокрылое воздушное судно 1 по настоящему изобретению содержит систему несущего винта с двигателем 54, функционально соединенным с лопастями 20 несущего винта посредством трансмиссии, такой как зубчатые колеса 106, 107 (Фиг. 11). Устройство управления шагом, такое как автомат 56' перекоса (Фиг. 10), функционально соединено с лопастями 20 несущего винта для изменения циклического и/или общего шага лопастей 20 несущего винта в зависимости от выходного воздействия сервомеханизма, такого как сервомеханизмы 58, 59 (Фиг. 3), через рычажные механизмы, такие как звенья 125, 126 управления шагом (Фиг. 10). Энергия, такая как электрическая энергия от батарей (не показаны) или топливо из топливного бака (не показан), находящаяся в энергетическом модуле 13, проходит по каналу для передачи энергии в систему несущих винтов и обеспечивает энергию для функционирования устройства 55 управления, двигателя 54 и сервомеханизмов 58 и 59. Сигналы управления от устройства 55 управления проходят по каналу для передачи сигналов и регулируют частоту вращения двигателя 54 и выходное устройство позиционирования сервомеханизмов 58 и 59. Канал для передачи энергии и канал для передачи сигналов проходят между стороной входа и стороной выхода лопастей 20 несущего винта через каналы 96, также называемые внутренним пространством 96, сформированные в основе конструкции или остове 40 (Фиг. 7А, Фиг. 7В и Фиг. 15) летательного аппарата 1.
[0079] В полете в режиме висения первый несущий винт 3 и второй несущий винт 5 вращаются в противоположных направлениях вокруг общей оси 7, отбрасывая воздух в направлении вниз 24 и поднимая летательный аппарат 1 в направлении вверх, как показано на Фиг. 2А. Первый несущий винт 3 содержит лопасти 20 несущего винта, выполненные так, чтобы вращаться в направлении 21, а второй несущий винт 5 содержит лопасти 22 несущего винта, выполненные так, чтобы вращаться в направлении 23 вокруг общей оси 7. Поскольку лопасти 20 первого несущего винта и лопасти 22 второго несущего винта оснащены управлением циклическим шагом, летательный аппарат 1 выполнен так, чтобы управляемо лететь в направлении 25, причем общая ось 7 ориентирована по существу вертикально.
[0080] Как показано на Фиг. 2В, второй вариант осуществления настоящего изобретения, рассматриваемый в настоящем описании, показан с бустерным модулем 8, прикрепленным к нижней секции 6 на стыковом узле 9 бустера. Бустерный модуль 8 содержит, например, вспомогательный источник энергии (не показан), дополняющий внутренний источник энергии, содержащийся в энергетических модулях 13 и 14 внутри летательного аппарата 1. В приведенных в качестве примера вариантах исполнения вспомогательный источник энергии (не показан) и энергетические модули 13 и 14 представляют собой электрические батареи 13 и 14. Бустерный модуль 8 содержит левое и правое крылья 16, 17 для создания дополнительной подъемной силы для летательного аппарата 1 в полете в направлении 18, причем общая ось 7 направлена по существу горизонтально.
[0081] Каркас 40 летательного аппарата образует остов винтокрылого летательного аппарата 1 и в целом проходит вертикально через центр винтокрылого летательного аппарата 1 от верхней секции 2' к нижней секции 6, как показано лучше всего на Фиг. 4. В приведенных в качестве примера вариантах исполнения каркас 40 летательного аппарата представляет собой невращающуюся каркасную трубу с пустотелым внутренним каналом 96 (Фиг. 7А) или крестообразную балку 97 с внешними каналами (Фиг. 7В). Системы 3, 5 первого и второго несущего винта, также называемые модулями 3, 5 первого и второго несущего винта, все элементы которых расположены внутри верхней секции 2', средней секции 4 и нижней секции 6, присоединены к каркасу 40 летательного аппарата. Как показано на Фиг. 7А, продолговатый центральный остов 40, также называемый невращающейся пустотелой каркасной трубой 40, служит в качестве канала для электропроводки 45, системы трубопроводов (не показаны) и механических рычажных механизмов (не показаны), проложенных между элементами, расположенными в верхней секции 2', средней секции 4 и нижней секции 6 винтокрылого летательного аппарата 1. Продольные прорези 46 и 47 представляют собой точки входа и выхода для электрических проводов 45, системы трубопроводов и рычажных механизмов. Поскольку невращающаяся пустотелая каркасная труба 40 и крестообразная балка являются цельными и непрерывными между секциями корпуса 2, 4 и 6, то увеличивается жесткость и уменьшается вес конструкции летательного аппарата 1. В приведенных в качестве примера вариантах исполнения невращающаяся пустотелая каркасная труба 40 и крестообразная балка 97 предпочтительно изготовлены из навитого или одноосно ориентированного углеродного графитового волокна, стекловолокна или алюминиевого сплава марки 7075 (или подобных) с внешним диаметром (для каркасной трубы 40) или шириной (для крестообразной балки) приблизительно 0,5 дюйма (13 мм) и толщиной стенки от приблизительно 0,03 дюйма (0,76 мм) до приблизительно 0,05 дюйма (1,3 мм).
[0082] Винтокрылый летательный аппарат 1 выполнен с тремя секциями корпуса, как показано лучше всего на Фиг. 3. В верхней секции 2' установлены датчик авиагоризонта/стабилизатор 50, электронный гиростабилизатор 51, опорная плита 52 гироскопа, присоединенная к верхнему концу каркасной трубы 40, первое устройство 53 регулирования частоты вращения двигателя, первый двигатель 54, радиоприемник и устройство 55 управления. В средней секции 4 расположены первый автомат 56' перекоса, второй автомат 57' перекоса, циклический сервомеханизм 58 тангажа и циклический сервомеханизм 59 крена. Нижняя секция 6 содержит второе устройство 60 регулирования частоты вращения двигателя, второй двигатель 61, батарею 62 для радиооборудования, первый и второй энергетические модули 13 и 14, а также модуль полезного груза 15.
[0083] В приведенном в качестве примера варианте осуществления настоящего изобретения датчик авиагоризонта/стабилизатора 50 представляет собой прибор модели "FS8 Copilot", выпускаемый компанией FMA, электронный гиростабилизатор 51 представляет собой прибор модели G500 с силиконовым кольцом, выпускаемый компанией JR, двигатели 54, 61 представляют собой устройства модели B2041S выпускаемые компанией "Haker", а устройства 53, 60 регулирования частоты вращения двигателей представляют собой устройства модели "Pegasus 35", выпускаемые компанией "Castle Creations", являющиеся цифровыми программируемыми контроллерами частоты вращения на базе микропроцессоров. Кроме того, винтокрылый летательный аппарат 1 выполнен так, чтобы вмещать GPS-приемник/контроллер и систему телеметрии (не показана), которые предназначены для присоединения к верхней секции 2'.
[0084] Внутренние элементы винтокрылого летательного аппарата 1 присоединены к каркасной трубе 40 кольцевыми креплениями 70, как показано на Фиг. 8. Кольцевое крепление 70 имеет кольцевую внутреннюю часть 71, соответствующую кольцевой внешней поверхности каркасной трубы 40. Кольцевое крепление 70 имеет простирающиеся в радиальном направлении монтажные кронштейны 72, 73, 74, имеющие выступы 75, 76, 77, предназначенные для того, чтобы удерживать механические, электрические и другие внутренние элементы винтокрылого летательного аппарата 1. Кольцевое крепление 70 выполнено так, чтобы служить опорой двигателя 54 на выступе 75, устройства 53 регулирования частоты вращения двигателя на выступе 76 и радиоприемника 55'' на выступе 77. Внутренние элементы летательного аппарата 1, например, соединены с монтажными выступами с использованием разнообразных крепежных элементов (таких как нейлоновые стяжки, проходящие через отверстия 78) или клеев. Кольцевая часть 71 содержит средство для присоединения кольцевого крепления 70 к невращающейся пустотелой каркасной трубе 40 для предотвращения вращения кольцевого крепления 70 или его скольжения в осевом направлении вдоль невращающейся пустотелой каркасной трубы 40. Средство для закрепления кольцевого крепления 70 к на невращающейся пустотелой каркасной трубе 40 содержит крепежный элемент (не показан), вмещаемый соответствующим резьбовым приемником 79, или различные клеи. Второе кольцевое крепление 80, как показано на Фиг. 9, содержит круглое кольцо 63, выступы 82 и 83, а также осевые стойки 84, 85 для установки элементов жесткости 86, 87, 88 корпуса, рычагов 90 и 91, препятствующих вращению автомата перекоса, и звеньев 92 и 93 автомата перекоса.
[0085] Модуль 81 сервомеханизма содержит кольцевое крепление 80, на которое опираются сервомеханизм 58 тангажа, сервомеханизм 59 крена и универсальные элементы 86, 87 жесткости корпуса (как описано в предварительной заявке на патент США №60/525,585 на имя Arlton, содержание которой включено в настоящее описание посредством ссылки), на которые опирается обшивка 11 средней части корпуса, как показано, например, на Фиг. 10. Как показано на Фиг. 3, Фиг. 4, Фиг. 5, Фиг. 6, Фиг. 9, Фиг. 10 и Фиг. 15, элементы 86, 87, 88 жесткости корпуса прикреплены к кольцевому креплению 80. Сквозные отверстия 263 в элементах 86, 87, 88 жесткости корпуса могут вмещать крепежные элементы многих типов, имеющихся на рынке, такие как болты и шпильки (не показаны), для прикрепления элементов 86, 87, 88 жесткости корпуса к кольцевому креплению 80 и обшивке 11 средней части корпуса. Обшивка 11 средней части корпуса в целом прикреплена к элементам 86, 87, 88 жесткости корпуса для создания обшивки и аэродинамического обтекателя для сервомеханизмов 58, 59 и автоматов 56', 57' перекоса. Кольцевые крепления 70, 80 предназначены для того, чтобы объединять многие конструктивные элементы винтокрылого летательного аппарата 1 и служить им опорой. Кольцевые крепления 70, 80 помогают при сборке винтокрылого летательного аппарата 1, поскольку кольцевые крепления 70, 80 и соединенные с ними внутренние элементы могут быть предварительно собраны как сборочные узлы, и затем последние могут быть собраны вместе с другими модулями с невращающейся пустотелой каркасной трубой 40 на окончательной стадии производства.
[0086] Как показано на Фиг. 11А, Фиг. 12А, Фиг. 12В, Фиг. 13А, Фиг. 13В и Фиг. 14, система 3 несущего винта, также называемая модулем 3 несущего винта, содержит опору 100 несущего винта, втулку 101 несущего винта с зубчатым колесом 107 внутреннего зацепления, первый и второй шарикоподшипники 102 и 103, вал 101А, простирающийся между подшипниками 102 и 103, кольцевой зажим 104, двигатель 54, планетарный редуктор 105, зубчатое колесо 106, поворачивающую систему 108 лопасти, поворотные оси 109, концевые крышки осей 110, торсионные пружины 111 и лопасти 20 несущего винта. Основание 122 двигателя выполнено так, чтобы вместить редуктор 105 для присоединения двигателя 54 к опоре 100 несущего винта. В собранном состоянии подшипники 102, 103 удерживаются кольцевым зажимом 104, входящим в паз 99 на выступе 112, простирающемся от опоры 100 несущего винта. Лопасть 20 несущего винта удерживается на месте пальцем 113, проходящий через головку 110 и отверстие 114, выполненное в оси 109. Ось 109 проходит через отверстие 117 для подшипника, выполненное во втулке 101 несущего винта, и в отверстие 94 поворачивающей системы 108, где она удерживается другим пальцем (не показан). Звенья 119 управления шагом соединяют поворачивающую систему 108 с автоматом 56' перекоса.
[0087] Как показано на Фиг. 11В, модуль несущего винта выполнен так, чтобы обеспечить опору лопастям несущего винта, выполненным с изменяемыми как циклическим шагом, так и общим шагом, и содержит общую втулку 201 несущего винта, которая подобна втулке 101 несущего винта, воспринимающую воздействие общей рамки 208 поворачивающей системы, соединенной крепежными элементами 212 со сформированными на внутренней поверхности втулки 201 выступами 214. Общая рамка 208 поворачивающей системы воспринимает возникающие в полете радиальные нагрузки, создаваемые лопастями 20 несущего винта и действующие через упорные подшипники 203. Звенья 119 управления шагом соединяют рычаги 210 изменения шага с автоматом 56' перекоса.
[0088] В приведенных в качестве примера вариантах исполнения планетарный редуктор 105 имеет передаточное отношение приблизительно 4:1. Шестерня на двигателе 54 имеет девять зубьев и находится в зацеплении с зубчатым колесом 107 внутреннего зацепления, расположенным во втулке 101 несущего винта и имеющим шестьдесят зубьев. Таким образом, общее передаточное отношение модуля 3 несущего винта составляет приблизительно 26,7:1 (то есть выходной вал двигателя 54 делает 26,7 оборотов на каждый оборот втулки 101 несущего винта). Такое передаточное отношение предполагает использование электрических двигателей с высоким кпд, работающих при высоких напряжениях и с высокими частотами вращения.
[0089] В приведенных в качестве примера вариантах исполнения двигатель 54 представляет собой бесщеточный двигатель. В некоторых применениях, особенно тех, где время полета короткое, а экономичность является существенным фактором (например, для одноразового военного снаряжения ближнего действия) для вращения втулки 101 несущего винта вместо одного бесщеточного двигателя 54 высокой стоимости используют несколько дешевых щеточных двигателей (то есть двигателей, имеющих углеродные щетки и вращающиеся коллекторы). В таких случаях, несмотря на то, что модуль 3 несущего винта показан с одним двигателем 54, приводящим во вращение втулку 101 несущего винта, объем этого изобретения охватывает модуль несущего винта, имеющий не один двигатель, а несколько двигателей, расположенных по окружности опоры 100 несущего винта, для приведения в движение втулки 101 несущего винта. Также предполагается, что втулка 101 несущего винта как таковая может быть выполнена с проволочными обмотками и магнитами и действовать в качестве двигателя, так что не требуется отдельных двигателей для приведения втулки 101 несущего винта в движение вокруг общей оси 7.
[0090] Лопасть 20 несущего винта в показанном варианте осуществления настоящего изобретения изготовлена литьем под давлением из поликарбонатной пластмассы и представляет собой вид лопасти, описанный в патенте США №5,879,131 на имя Arlton, содержание которого включено в это описание посредством ссылки. Лопасть 20 несущего винта свободна для махового движения вверх и вниз на приблизительно 6 градусов вокруг оси 120 махового движения, до того как лапки 121 на торсионных пружинах 111 соприкоснутся с поперечной осью 109 и окажут сопротивление дальнейшему маховому движению. Это означает, что лопасти 20 несущего винта могут перемещаться в полете маховым движением вверх и вниз свободно на приблизительно ±6 градусов и могут складываться вверх на 90 градусов и вниз на 90 градусов для хранения или во время аварийной посадки.
[0091] В варианте осуществления настоящего изобретения, показанном на фигурах, опора 100 несущего винта изготовлена как одна деталь литьем под давлением из термопластичного материала, такого как поликарбонат или нейлон. Втулка 101 несущего винта отлита под давлением одной деталью из термопластичного материала, такого как нейлон или ацеталь. Лопасти 20 винта в полете опираются на втулку 101 винта (которая образует часть внешней обшивки корпуса летательного аппарата 1), а не на традиционные соосные валы, совпадающие с общей осью 7. Это приводит к размещению опорных подшипников 102, 103 несущего винта очень близко к лопастям 20 несущего винта и освобождает пространство внутри центральной части корпуса винтокрылого летательного аппарата 1 для других механических или электрических элементов. В системе несущих винтов с фиксированным шагом (показанной на фигурах) возникающие в полете радиальные усилия, создаваемые вращающимися лопастями 20 несущего винта, воспринимаются внутренней поворачивающей системой 108, которая соединяет две лопасти 20 несущего винта и которая имеет внутреннее отверстие, окружающее и плотно облегающее каркасную трубу 40, и таким образом, никаких специальных упорных подшипников не требуется.
[0092] Как показано на Фиг. 15, система соосных несущих винтов по настоящему изобретению содержит каркасную трубу 40, две системы 3, 5 несущего винта, два автомата 56', 57' перекоса, и один модуль 81 сервомеханизма, присоединенные к невращающейся пустотелой каркасной трубе 40 зеркально симметрично вокруг модуля 81 сервомеханизма. Несмотря на то, что описана система соосных несущих винтов с двумя несущими винтами, винтокрылый летательный аппарат 1 может быть оснащен дополнительными системами несущего винта (не показаны), разнесенными по длине невращающейся пустотелой каркасной трубы 40, для создания дополнительной тяги или дополнительных эксплуатационных возможностей.
[0093] В приведенном в качестве примера варианте осуществления настоящего изобретения винтокрылый летательный аппарат 1 содержит систему несущих винтов фиксированного шага, которой требуются только два сервомеханизма 58, 59 для управления тангажем летательного аппарата (циклическим управляющим воздействием вперед/назад) и креном летательного аппарата (циклическим управляющим воздействием влево/вправо). Третий сервомеханизм 98 общего шага может быть установлен подобным образом в средней секции 4, например, если требуется управление общим шагом.
[0094] Системы 3, 5 несущего винта соединены с автоматами 56', 57' перекоса звеньями 119 управления шагом. Сервомеханизмы 58, 59 соединены с автоматами 56', 57' перекоса звеньями 125, 126 управления шагом. При работе втулки 101 несущих винтов вращаются в противоположных направлениях. Сервомеханизмы 58, 59 управляются бортовой электроникой управления полетом 55' с одновременным наклоном автомата 56' перекоса и автомата 57' перекоса, которые затем циклически изменяют угол шага лопасти вращающихся лопастей 20 несущего винта для наклона летательного аппарата 1 в одном из направлений: направлении тангажа летательного аппарата и направлении крена летательного аппарата. В другом варианте осуществления настоящего изобретения, имеющем общий шаг (как показано на Фиг. 11В), третий сервомеханизм и третье звено управления шагом (не показаны) выполнены так, чтобы изменять осевое положение автоматов 56', 57' перекоса вдоль общей оси 7 и общий шаг лопастей 20, 22 несущего винта с использованием электронной системы микширования общего и циклического шага (Collective-Cyclic Pitch Mixing, (ССРМ)). В этом случае особенностью данного варианта осуществления настоящего изобретения является использование сервомеханизмов, расположенных между системами 3, 5 несущего винта и непосредственно присоединенных к управляющим автоматам 56', 57' перекоса соответствующими рычажными механизмами для управления системой соосных несущих винтов.
[0095] Один из примеров вариантов осуществления настоящего изобретения содержит двигатели 54, 61, расположенные выше и ниже лопастей 20, 22 несущего винта (как показано на Фиг. 25А) с передачей энергии между системами 3, 5 несущего винта, осуществляемой с помощью электропроводки 45 вместо механических валов, тем самым снижая сложность конструкции и массу. В другом варианте осуществления настоящего изобретения (показанном на Фиг. 26), двигатели 54, 61 расположены так, что находятся между лопастями 20, 22 несущего винта, а сервомеханизмы 58, 59 расположены так, что находятся на некотором расстоянии один от другого так, что лопасти 20, 22 несущего винта находятся между ними (как показано на Фиг. 26). Поскольку энергия и управление систем 3, 5 несущего винта по природе являются полностью электрическими, вся система управления винтокрылого летательного аппарата 1 может приводится в действие электрическими цифровыми вычислительными устройствами и полупроводниковыми электронными устройствами без механических рычажных механизмов или гидравлического усиления. Расположение двигателей 54, 61 как показано на Фиг. 25А устраняет необходимость в соосных вращающихся валах между лопастями 20, 22 несущего винта и обеспечивает расположение сервомеханизмов 58, 59 для непосредственного приведения в действие и автомата 56' перекоса (содержащегося в первом устройстве 56 управления шагом) и автомата 57' перекоса (содержащегося во втором устройстве 57 управления шагом).
[0096] Одна из особенностей настоящего изобретения состоит в том, что летательный аппарат 1 может осуществлять полет с одним или двумя сервомеханизмами циклического шага (сервомеханизмы 58, 59). В режиме полета с одним сервомеханизмом разница крутящих моментов двигателей 54, 61 регулирует направление рыскания, а сервомеханизм 58 управляет полетом вперед-назад. С всего лишь одним сервомеханизмом циклического шага летательный аппарат 1 может осуществлять полет, более подобный полету самолета, имеющему управление только рулями направления и высоты. В режиме полета с двумя сервомеханизмами, как показано на фигурах, сервомеханизмы 58, 59 обеспечивают тангаж летательного аппарата вперед/назад и крен летательного аппарата вправо/влево разницей крутящих моментов двигателей 54, 61, обеспечивающих регулирование рыскания.
[0097] В еще одном варианте осуществления настоящего изобретения энергия для приведения в действие двигателей 54, 61 в полете обеспечивается электрическими батареями 130 большой емкости, такими как литий-полимерные или литий-ионные батареи, или же топливными элементами. Как показано на Фиг. 16А и Фиг. 16В, энергетический модуль 13 содержит шесть перезаряжаемых литий-ионных батарей 130, расположенных в виде шестиугольника вокруг невращающейся пустотелой каркасной трубы 40, и электрически соединенных последовательно для создания 21,6 В электрического потенциала. Кольцевое крепление 131 батарей выполнено с центральным отверстием (кольцом) 132 для установки невращающейся пустотелой каркасной трубы 40 и фланца 133, предназначенного для поддерживания батарей 130. Электрические провода 45 от энергетического модуля 13 введены в невращающуюся пустотелую каркасную трубу 40 через отверстие 47 (как показано на Фиг. 7А) и проложены через невращающуюся пустотелую каркасную трубу 40 к устройствам 53, 60 регулирования частоты вращения двигателей.
[0098] Как показано лучше всего на Фиг. 25А, для обеспечения дополнительной энергии во время полета предусмотрены несколько энергетических модулей 13, 14, которые в приведенных в качестве примера вариантах исполнения электрически соединены параллельно для увеличения электрического тока, доступного для двигателей 54, 61. Время полета винтокрылого летательного аппарата 1 может быть изменено путем изменения количества энергетических модулей 13, 14, перемещаемых в полете.
[0099] Дополнительные стопорные кольца (или кольцевые крепления без радиальных кронштейнов) 135 расположены выше и ниже энергетических модулей 13, 14 для облегчения прикрепления энергетических модулей 13, 14 к невращающейся пустотелой каркасной трубе 40, как показано, например, на Фиг. 4. Поскольку энергетические модули 13, 14 являются относительно тяжелыми по сравнению с другими узлами летательного аппарата 1, стопорные кольца 135 предохраняют энергетические модули 13, 14 от скольжения вдоль невращающейся пустотелой каркасной трубы 40 во время аварийной посадки винтокрылого летательного аппарата 1. Одна из особенностей настоящего изобретения состоит в том, что винтокрылый летательный аппарат 1 является пригодным к изготовлению и сборке в виде модулей. Энергетические модули, бустерные модули, модули несущего винта, крыла, управления, электронного оборудования и модули для полезного груза изготавливают отдельно, и надевают на каркасную трубу 40. Электрические разъемы для подключения соединений, проходящих через отверстия 46, 47 в каркасной трубе 40, установлены заподлицо с поверхностью каркасной трубы 40, что облегчает сборку и разборку летательного аппарата 1 при выполнении технического обслуживания и ремонтов.
[0100] Количество запасенной энергии на единицу массы и удельная мощность являются соображениями, принимаемыми во внимание при проектировании БПЛА (беспилотного летательного аппарата) и могут быть применены к летательному аппарату в целом. Летательный аппарат с большим количеством запасенной энергии на единицу массы и удельной мощностью имеет лучшие общие технические характеристики, чем летательный аппарат с более низкими удельными показателями. Обычно количество запасенной энергии на единицу массы и удельная мощность определяются как количество энергии и мощности, доступные на единицу веса. Например, количество энергии на единицу массы и удельная мощность топлива или электрической батареи (также известные как "удельная энергия") соответствует количеству энергии, содержащейся в единице топлива или батарее (измеряемой, например, в Н⋅м/кг или фут-фунт/слаг).
[0101] Химические (жидкие) топлива имеют тенденцию к более высоким удельным энергиям, чем электрические батареи. Одной из дополнительных особенностей энергии жидкого топлива по сравнению с энергией электрической батареи является то, что вес летательного аппарата на жидком топливе уменьшается в процессе полета (вплоть до 60%) по мере выработки топлива. Следовательно, удельная энергия летательного аппарата на жидком топливе (то есть энергия, доступная на единицу веса летательного аппарата) снижается медленно, а удельная мощность (мощность, доступная на единицу веса) в процессе полета возрастает. Это означает, что технические характеристики летательного аппарата на жидком топливе фактически улучшаются к концу полета.
[0102] Напротив, общая удельная мощность летательного аппарата с электрическим питанием постоянна на всем протяжении полета, поскольку максимальная выходная мощность батарей почти постоянна, и батареи не теряют веса по мере разряда. К тому же количество запасенной энергии на единицу массы уменьшается быстро, поскольку уменьшается общая доступная энергия. Для увеличения количества запасенной энергии на единицу массы и удельной мощности устройства по настоящему изобретению предусмотрен вспомогательный электрический бустерный или энергетический модуль 8, который может быть сброшен в полете после исчерпания его источника энергии. Таким образом, бустерный модуль 8 содержит дополнительные модули батарей (не показаны), собранные вокруг общей оси 7 с механизмом удерживания бустерного модуля 8 на винтокрылом летательном аппарате 1.
[0103] В другом варианте осуществления настоящего изобретения бустерный модуль 8 содержит двигатель внутреннего сгорания, такой как дизельный двигатель (не показан), который приводит в действие электрический генератор (не показан) для преобразования химической энергии, содержащейся в химическом топливе, в электрическую энергию. В других вариантах осуществления, предложенных настоящим изобретением, для выработки электрической энергии может быть использована система турбоэлектрического генератора (не показана). Учитываемым фактором для бустерного модуля 8, содержащего такой газоэлектрогенератор, является то, что весь вес модуля, топливной системы и двигателя может быть сброшен в конце первой фазы полета, благодаря чему винтокрылый летательный аппарат 1 имеет относительно малый вес для выполнения второй фазы полета.
[0104] В этом примере варианта осуществления настоящего изобретения бустерный модуль 8 содержит складные крылья 16, 17, предназначенные для увеличения подъемной силы в режиме горизонтального полета винтокрылого летательного аппарата 1. Как показано на Фиг. 17, крыло 17 складывают по оси 140 складывания для компактного хранения. Крылья 16, 17 прикреплены приблизительно в месте их "четверти хорды" к осям шарниров (не показаны). Крыло 16 свободно вращается относительно поперечной оси 143 с осями шарниров, жестко фиксируемыми перпендикулярно общей оси 7 (как показано также на Фиг. 2), самоустанавливаясь в положение наилучшего угла атаки, когда крыло развернуто для полета. Поскольку крылья 16, 17 свободно поворачиваются вокруг поперечной оси в полете, такие дополнительные приспособления, как крылья 16, 17, иногда называют "самоустанавливающимися крыльями". Следует заметить, что крылья 16, 17, являясь самоустанавливающимися, могут эффективно функционировать в широком диапазоне скоростей вследствие их способности изменять угол атаки автоматически в соответствии с набегающим воздушным потоком. Применение такого самоустанавливающегося крыла на винтокрылом БПЛА является одной из особенностей изобретения.
[0105] В горизонтальном полете на высокой скорости общая ось 7 ориентирована по существу горизонтально вместе с модулями 3, 5 несущего винта, совместно функционирующими подобно одиночному противовращающемуся винту для перемещения винтокрылого летательного аппарата 1 в горизонтальном направлении 18. Крылья 16, 17 способствуют подъему нижней секции 6 и бустерного модуля 8 таким образом, что модули 3, 5 несущего винта могут расходовать больше мощности на сообщение движения вперед и меньше на создание вертикальной подъемной силы.
[0106] Также следует заметить, что устройство по настоящему изобретению не требует наличия аэродинамических поверхностей управления (таких как аэродинамические поверхности управления на крыльях 16, 17), потому что управление циклическим шагом модулей 3, 5 несущего винта обеспечивает энергию управления для осуществления маневра в направлении 144 по тангажу летательного аппарата (управление подъемом и опусканием) и в направлении 145 путевого движения (курс), когда общая ось 7 является по существу горизонтальной. Управление по крену подобно самолету (вокруг общей оси 7) в горизонтальном полете на высокой скорости осуществляется за счет разницы крутящих моментов/частоты вращения модулей 3, 5 несущего винта. Этот способ управления для горизонтального полета винтокрылого БПЛА является особенностью этого примера варианта осуществления настоящего изобретения.
[0107] Как показано на Фиг. 18А и Фиг. 18В, когда энергия бустерного модуля 8 израсходована, команда от бортового устройства 55 управления винтокрылого летательного аппарата 1 приводит в действие механизм, такой как защелка (не показан), который отделяет бустерный модуль 8 от винтокрылого летательного аппарата 1, и бустерный модуль 8 падает в направлении 19. Затем винтокрылый летательный аппарат 1 в одном из режимов полета принимает ориентацию, приближенную к вертикальной, и продолжает полет подобно вертолету.
[0108] В другом варианте осуществления настоящего изобретения бустерный модуль 8 содержит полезный груз 147 для выполнения конкретных задач, такой как взрывающиеся боеприпасы, погружаемый гидролокатор, гидрофоны, идентификационный радиомаяк или радиогидроакустический буй. Как показано на Фиг. 19, отделившись от винтокрылого летательного аппарата 1, бустерный модуль 8 падает, оставляя гидролокатор, систему гидрофонов 147 или другой датчик, соединенный с винтокрылым летательным аппаратом 1 проводом или волоконно-оптическим кабелем 146, с тем чтобы винтокрылый летательный аппарат 1 мог перемещать полезный груз 147 из одного места в другое, доставлять полезный груз 147 точно в требуемую точку и действовать в качестве устройства телеметрической связи между полезным грузом 147 и отдаленным приемником сигнала (не показан). Это может быть эффективным способом, например, для сопровождения цели или маркировки судна в море с дистанционным радио маркером для идентификации или другими приборами для маркировки.
[0109] На Фиг. 22 показан способ доставки маркера, содержащего, например, датчик или средство маркировки, такое как несмываемая краска или радиопередатчик, для дистанционного определения положения, в данном случае судна 157 в открытом океане. Летательный аппарат 1 показан приближающимся к судну S (на схеме), маневрирующим для соприкосновения с судном S, оставляющим маркер на судне S (на схеме) и покидающим зону (на схеме). Данный способ маркировки является одной из особенностей настоящего изобретения, которая обеспечивает возможность контроля интересующего объекта после того, как летательный аппарат 1 покинул зону его расположения. Альтернативно или в сочетании летательный аппарат 1 может нести тот или иной датчик, покидая определенную зону, в которой может быть, например, взят образец атмосферы вблизи судна S, и возвращать датчик и образец в удаленную точку обработки данных для дальнейшего анализа масс-спектрометром, биологическим или радиологическим измерительным прибором или другим подобным оборудованием (не показано). Несмотря на то, что интересующий объект показан на чертежах в виде судна S, понятно, что судно S может представлять собой любой другой интересующий объект в досягаемости для летательного аппарата 1, такой как грузовик, воздушное судно, здание, вышка, линия электропередачи или открытая поверхность земли.
[0110] Другой вариант осуществления настоящего изобретения, показанный на Фиг. 20А, Фиг. 20В и Фиг. 20С, содержит складные лопасти 148, 149 соосных несущих винтов неодинаковой длины, причем верхние лопасти 148 имеют больший размах, чем нижние лопасти 149. Эта особенность позволяет, чтобы во время аварийной посадки летательного аппарата, когда верхние лопасти 148 касаются земли 155 раньше нижних, более коротких, лопастей 149, верхние лопасти 148 складывались в сторону от нижних лопастей 149 или быстрее, чем нижние лопасти 149, тем самым снижая вероятность того, что верхние лопасти 148 и нижние лопасти 149 будут контактировать одна с другой, продолжая вращаться с большой частотой вращения. Как показано на фигурах, нижние лопасти 149 имеют размах приблизительно 20-22 дюйма (51-56 см).
[0111] Возможность складывания для компактного хранения и для посадки является другой особенностью настоящего изобретения. Как показано на Фиг. 21А и Фиг. 21В, винтокрылый летательный аппарат 1 является достаточно компактным для размещения внутри трубы стандартного гидроакустического буя размера А, который используется в ВМС США. Уникальная каркасно-трубчатая конструкция по настоящему изобретению не только позволяет уменьшить размеры винтокрылого летательного аппарата 1 для размещения внутри трубы гидроакустического буя, она также амортизирует толчки при запуске с помощью пиротехнической пусковой установки "Charge Actuated Device (CAD)" с летательного аппарата, такого как морской патрульный самолет Р-3 ВМС США.
[0112] В одном из вариантов осуществления настоящего изобретения, показанном на Фиг. 21А, предусмотрен одноразовый пусковой контейнер 150, предназначенный для защиты аэродинамических поверхностей винтокрылого летательного аппарата 1 при запуске с другого летательного аппарата, перемещающегося со скоростью 150-250 узлов (280-467 км/ч) на высоте 10000-20000 футов (3000-6000 м). Парашют (не показан), прикрепленный к контейнеру 150, замедляет и стабилизирует снижение контейнера 150, который отделяется от винтокрылого летательного аппарата 1 на меньшей высоте. В приведенных в качестве примера вариантах исполнения винтокрылый летательный аппарат 1 изображен в масштабе и имеет длину 30 корпуса приблизительно 24 дюйма (51 см), диаметр 31 верхней части приблизительно 2,25 дюйма (5,7 см), диаметр верхнего несущего винта 32 приблизительно 28 дюймов (71 см) и диаметр нижнего несущего винта 33 приблизительно 24 дюйма (61 см) или менее. Бустерный модуль 8 имеет длину 34 приблизительно 12 дюймов (30 см). Первый несущий винт 3 и второй несущий винт 5 вращаются с частотой вращения приблизительно 1400 об/мин в полете на режиме висения и приблизительно 2000 об/мин или выше во время вертикального набора высоты и выполнения маневров на высокой скорости.
[0113] Другой вариант осуществления, предложенный настоящим изобретением, предназначен для использования с боеприпасом для оценки повреждений, нанесенных цели этим боеприпасом. Как показано на Фиг. 23, летательный аппарат 1 предназначен для использования с боеприпасом, который, в приведенном в качестве примера варианте, показан на фигурах в виде свободно падающей бомбы 160. Бомбу 160 сбрасывают со средства доставки, такого как самолет. Свободно падающая бомба 160 при использовании транспортирует летательный аппарат 1 в район цели, а затем, прежде чем бомба 160 достигает своей цели, летательный аппарат 1 для перемещения отдельно от бомбы 160 отделяется, как показано в приведенном в качестве примера варианте, с помощью вспомогательного тормозного парашюта 162, либо отстреливается от бомбы 160 устройством, приводимым в действие зарядом взрывчатого вещества. Затем летательный аппарат 1 совершает полет по заданной траектории или зависает в районе цели вблизи места падения для наблюдения за повреждениями, произведенными бомбой, и передает видео- и другую информацию удаленному оператору (не показан). Этот способ оценивания повреждения, произведенного боеприпасом, является одной из особенностей изобретения, которая обеспечивает немедленное оценивание повреждений, нанесенных в ходе боевых действий, без необходимости для средства доставки оставаться в зоне удара и снижает необходимость последующих ударов по той же цели, в то же время сводя к минимуму опасность для членов экипажа.
[0114] Как показано на Фиг. 26, двигатели 54, 61 расположены так, что находятся между лопастями 20, 22 несущего винта. Сервомеханизмы 58, 59 расположены так, что находятся на некотором расстоянии друг о друга таким образом, что лопасти 20, 22 несущего винта находятся между ними.
[0115] В другом приведенном в качестве примера варианте осуществления настоящего изобретения двигатели 54, 61 расположены ниже лопастей 22 несущего винта, а вращающийся трубчатый вал 254 проходит внутри невращающейся трубы 253 колонки для передачи мощности на несущий винт 22, как показано, например, на Фиг. 28-31. В другом варианте осуществления настоящего изобретения для выработки необходимой для работы двигателей 54, 61 электрической энергии из тяжелого топлива, такого как дизельное топливо или авиационное топливо JP8, может быть предусмотрен двигатель внутреннего сгорания (не показан). В еще одном варианте осуществления настоящего изобретения двигатель внутреннего сгорания (не показан) может быть соединен с трубчатым валом 254 и опорой 100 несущего винта через редуктор (не показан), приводя лопасти 20, 22 несущего винта, также называемые несущими винтами 20, 22, в движение вокруг общей оси 7, также называемой осью 7 несущих винтов.
[0116] Трубчатый вал 254 может быть присоединен непосредственно к втулке 270 верхнего несущего винта, как показано на Фиг. 28 и Фиг. 29, или к ременной либо зубчатой передаче и системе 271 понижения скорости, установленной на верхнем конце трубы 253 колонки, как показано на Фиг. 29 и Фиг. 30. Система 271 понижения скорости, также называемая трансмиссией 271, может быть расположена на верхнем конце трубы 253 колонки, так что трубчатый вал 254 может работать при высокой частоте вращения с низким крутящим моментом. В результате масса трубчатого вала 254 может быть меньше, чем масса вала несущего винта сравнимых размеров, предназначенного для вертолета, который должен воспринимать полные полетные нагрузки втулки 270 несущего винта и лопастей 20 верхнего несущего винта.
[0117] Как показано на Фиг. 27-31, винтокрылые летательные аппараты 250, 251, предложенные настоящим изобретением, содержат обтекаемый корпус 260 и другие элементы конструкции, применимые для выполнения горизонтального полета на высокой скорости. Корпус 260 в некоторых вариантах осуществления настоящего изобретения может быть предназначен для перевозки одного или более пилотов либо одного или более пассажиров. Винтокрылые летательные аппараты 250, 251 содержат лопасти 20, 22 несущего винта противоположного направления вращения, выполненные с возможностью вращения вокруг общей оси 7, шасси 261, обтекаемый кожух 257 колонки, толкающий винт 258 и стабилизирующие хвостовые поверхности 259. Если смотреть сверху, кожух 257 колонки обычно в поперечном сечении имеет аэродинамическую форму для снижения лобового сопротивления. Кожух 257 колонки показан прикрепленным к обшивке 11 корпуса, а через нее винтами 277 к элементам жесткости 86, 87, 88 обшивки корпуса, которые крепят кожух колонки 257 к трубе 253 колонки и которые предотвращают вращения кожуха 257 колонки вокруг общей оси 7.
[0118] Как показано на Фиг. 28 и Фиг. 29, модуль 264 несущих винтов содержит лопасти 20 верхнего несущего винта, лопасти 22 нижнего несущего винта, узел 255 управления несущими винтами, узел 262 привода несущих винтов и узел 252 колонки. Узел 255 управления несущими винтами содержит автоматы 56', 57' перекоса, сервомеханизмы 58, 59, и звенья 125, 126 управления шагом. Узел 262 привода несущих винтов содержит двигатели 54, 61 с присоединенными зубчатыми колесами привода, предназначенные для приведения несущих винтов 20, 22 в движение вокруг оси 7 несущих винтов.
[0119] Узел 252 колонки содержит трубчатый вал 254, проходящий внутри трубы 253 колонки и опирающийся на верхний подшипник 273 колонки и нижний подшипник 274 колонки, как показано на Фиг. 32. Узел 252 колонки прикреплен к корпусу 260 кронштейнами 266, 267 колонки и болтами 202 колонки.
[0120] Трубчатый вал 254 имеет меньший диаметр, чем труба 253 колонки, оставляя кольцевой зазор 275 во внутреннем пространстве трубы 253 колонки, служащий каналом для электропроводки к сервомеханизмам 58, 59 и другим электрическим и электронным компонентам. Прорези 265, 269 для электропроводки представляют собой точки входа и выхода для электропроводки, системы трубопроводов и рычажных механизмов (не показано). В одном из вариантов осуществления настоящего изобретения труба 253 колонки выполнена из углеволоконного композитного материала и воспринимает боковые полетные нагрузки, создаваемые лопастями 20, 22 несущего винта, и демпфирует в полете вибрации трубчатого вала 254, особенно на верхнем подшипнике 273 колонки. Трубчатый вал 254 может быть выполнен из углеволоконного материала, алюминия или стали, и может воспринимать вертикальные полетные нагрузки дополнительно к кручению. Подшипники 273, 274 колонки могут быть выполнены так, чтобы воспринимать как осевые, так и радиальные нагрузки. Поскольку труба 253 колонки в большинстве случаев является жесткой и невращающейся, узел 252 колонки может быть более прочным и создавать меньшие вибрации, чем вал несущего винта на известном вертолете соосной схемы, который обычно не опирается на каркас летательного аппарата выше уровня нижнего несущего винта.
[0121] Как показано на Фиг. 33-36, узел 282 управления несущими винтами в соответствии с одним из вариантов осуществления изобретения содержит верхний автомат 279 перекоса, нижний автомат 280 перекоса, сервомеханизмы 284, 285, 286, кольцевые крепления 288, 289 сервомеханизмов и три Z-образных звена 291 управления шагом лопасти. Несмотря на то, что Z-образное звено 291 может быть выполнено как единое целое, на фигурах оно показано как узел, состоящий из по существу жесткого тела Z-образного звена 292, изготовленного из стеклонаполненного нейлона, и двух износостойких универсальных шаровых звеньев 293, 294, выполненных из более мягкого материала, такого как неармированный нейлон. Универсальные шаровые звенья 293, 294 установлены в гнезда 299, 300, выполненные в теле Z-образного звена 292, и закреплены винтами 295.
[0122] Одновременное одинаковое смещение в осевом направлении всех трех
Z-образных звеньев 291 в узле 282 управления несущими винтами, также называемом узлом 282 управления автомата перекоса, параллельно общей оси 7, заставляет автомат 279 перекоса и автомат 280 перекоса перемещаться вдоль общей оси 7, перемещая звенья 119 управления шагом и тем самым одновременно изменяя общий шаг лопастей 20, 22 несущего винта. Неодинаковое и независимое осевое смещение
Z-образных звеньев 291 заставляет автоматы 279, 280 перекоса одновременно наклоняться, что приводит к управлению циклическим шагом лопастей 20, 22 несущего винта. Z-образные звенья 291 ограничены в перемещении, параллельном общей оси 7, ограничительными упорами 287, выполненными на кольцевых креплениях 288, 298 и действующими как элементы, препятствующие вращению автомата перекоса.
[0123] Тело Z-образного звена 292 выполнено так, чтобы удерживать универсальные шаровые звенья 293, 294 с различными фиксированными углами фазы 290, так что неодинаковое осевое смещение Z-образных звеньев 291 параллельно общей оси 7 в направлении 298 вызывает наклон автомата 279 перекоса и автомата 280 перекоса в различных направлениях, который воздействует на относительный циклический фазовый угол лопастей 20, 22 несущего винта. Дифференциальный фазовый угол 290 показан как 90 градусов, однако он может находиться в диапазоне от приблизительно 60 градусов до приблизительно 120 градусов в зависимости от характеристик лопастей 20, 22 несущего винта и их частоты вращения. Дифференциальный фазовый угол 290 может быть изменен путем изменения длины универсальных шаровых звеньев 293, 294.
[0124] Z-образное звено 291 согласует циклические фазовые углы лопастей 20 верхнего несущего винта и лопастей 22 нижнего несущего винта. Фазовый угол несущего винта может быть определен как угол, измеренный между входным воздействием управления циклическим шагом автомата перекоса на систему вращающихся лопастей несущего винта и вызванным им маховым движением лопастей несущего винта и соответствующим наклоном диска несущего винта. Обычно фазовый угол для одновинтового вертолета близок к 90 градусам.
[0125] Однако вследствие аэродинамического взаимодействия верхних и нижних лопастей на вертолете соосной схемы фазовая характеристика несущего винта для каждого несущего винта на вертолете соосной схемы значительно отличается от 90 градусов. Например, как показано на Фиг. 37, если верхний автомат 279 перекоса и нижний автомат 280 перекоса наклонены вперед в направлении 297, то у лопастей 20 верхнего несущего винта появляется наклон в направлении 302 фазы верхнего несущего винта, а у лопастей 22 нижнего несущего винта появляется наклон в направлении 303 фазы нижнего несущего винта, и это означает, что абсолютные значения фазовых углов верхнего и нижнего несущих винтов составляют приблизительно 45 градусов для каждого из них. Разница фазовых углов 304 составляет приблизительно 90 градусов. Когда, перед тем как быть наклоненным, каждый из верхнего автомата 279 перекоса и нижнего автомата 280 перекоса поворачивается на 45 градусов относительно общей оси 7 фиксированным дифференциальным фазовым углом 290 Z-образного звена 291, тогда лопасти 20 верхнего несущего винта и лопасти 22 нижнего несущего винта окажутся наклоненными в направлении 297. В этой точке лопасти 20 верхнего несущего винта и лопасти 22 нижнего несущего винта называют находящимися в фазе одни с другими. Несущие винты, которые взаимодействуют в фазе один с другим, создают значительные управляющие усилия.
[0126] Как показано на Фиг. 38 и Фиг. 39, винтокрылый летательный аппарат по настоящему изобретению содержит обтекаемый фюзеляж, или корпус, 260, систему 306 привода и управления несущими винтами, систему 307 соосных несущих винтов противоположного направления вращения, способную создавать вертикальную подъемную силу, и обращенный назад винт 258, способный создавать горизонтальную тягу.
[0127] При работе энергия от электрического или другого двигателя 309 вращает шестерню 311 первой ступени редуктора, которая вращает конические зубчатые колеса 312, 313 в противоположных направлениях, как показано на Фиг. 38 и Фиг. 39. Коническое зубчатое колесо 312 соединено передаточным валом с шестерней 314 второй ступени, которая приводит во вращение основное зубчатое колесо 316 нижнего несущего винта и нижний несущий винт 22. Коническое зубчатое колесо 313 соединено передаточным валом с шестерней 315 второй ступени, которая приводит во вращение основное зубчатое колесо 317 верхнего несущего винта, трубчатый вал 254 внутри колонки 319 и верхний несущий винт 20. Ременной привод, состоящий из шкивов 321, 322 и клинового ремня 323, приводит во вращение вал винта 324 от заднего конца двигателя 309.
[0128] Как показано на Фиг. 40, колонка 319 невращающейся конструкции по настоящему изобретению выполнена так, что имеет внутренние проходы или каналы 325, в которых размещены элементы механических передач и элементы систем передачи электроэнергии и сигналов. Колонка 319 может содержать центральную стойку 326 и внешний кожух 327, которые имеют по существу круглое поперечное сечение и соединены простирающимися в радиальном направлении ребрами 328, которые разделяют центральную стойку 326 и внешний кожух 327, и повышают их жесткость. При работе трубчатый вал 254 вращается между подшипниками 273, 274 (как показано на Фиг. 32) внутри центральной стойки 326 для передачи вращательного движения от источника энергии, расположенного ниже колонки 319, на лопасти 20 несущего винта, расположенного вблизи верхнего конца 318 колонки 319. Подшипники 273, 274 служат для центрирования колонки внутри центральной стойки 326 и предохраняют трубчатый вал 254 от изгиба или касания внутренней поверхности центральной стойки 326. Трубчатый вал 254 механически отделен от электропроводки, системы трубопроводов, гибких трубопроводов и рычажных механизмов (не показаны), расположенных между центральной стойкой 326 и внешним кожухом 327 во внутренних каналах 325. По существу центральная стойка 326, внешний кожух 327 и ребра 328 образуют множество каналов для передачи сигналов и энергии, которые эффективно разделяют линии передачи механической энергии, электрической энергии, энергии текучей среды и сигналов, проходящие внутри колонки 319.
[0129] На Фиг. 41-43 показана колонка 330 невращающейся конструкции по настоящему изобретению, выполненная с шестью внутренними каналами 331, предназначенными для размещения рычажных механизмов 332 автомата перекоса, передающих управляющие механические сигналы от сервомеханизмов (не показаны), установленных ниже нижнего несущего винта 22, к автоматам 279, 280 перекоса. Колонка 330 может содержать центральную стойку 333 и внешний кожух 334, которые могут иметь по существу круглое поперечное сечение и соединены простирающимися в радиальном направлении ребрами 335, которые и разделяют центральную стойку 333 и внешний кожух 334, и повышают их жесткость. При работе трубчатый вал 254 вращается внутри центральной стойки 326 для передачи вращательного движения от источника энергии, расположенного ниже лопастей 22 несущего винта, на лопасти 20 несущего винта, расположенного вблизи верхнего конца 336 колонки 330.
[0130] Во внешнем кожухе 334 могут быть выполнены окна или прорези 342 для размещения точки входа и выхода электропроводки, системы трубопроводов, гибких трубопроводов (не показаны) и рычажных механизмов 332 автомата перекоса. Одной из особенностей изобретения является то, что ребра 335 и центральная стойка 333 передают нагрузки, возникающие в конструкции вокруг окон 342, тем самым улучшая конструктивную целостность колонки 330, особенно тогда, когда многие линии передачи энергии и передачи сигналов проложены в колонке 330, и значительная часть внешнего кожуха 334 перфорирована прорезями или отверстиями. Другой особенностью является то, что окна 342 могут простираться до самого конца 337 колонки 330, обеспечивая возможность снятия колонки 330 с летательного аппарата во время выполнения операций технического обслуживания. В одном из вариантов осуществления настоящего изобретения линии передачи энергии и передачи сигналов, проходящие внутри колонки 330, могут быть сняты и вновь установлены без предварительного демонтажа пробок и разъемов, которые могут с трудом проходить через внутренние каналы 331, в результате чего снижается стоимость технического обслуживания. Еще одной особенностью настоящего изобретения является то, что колонка 330 может быть изготовлена с низкими затратами, например, посредством экструдирования из алюминиевого сплава 7075 или путем получения одноосноориентированного волокнистого пластика из пропитанного эпоксидным связующим углеродного волокна для снижения веса и повышения прочности.
[0131] Как показано на Фиг. 44А и Фиг. 44В, каждый рычажный механизм 332 автомата перекоса может быть собран из нижнего ползуна 338, верхнего ползуна 339, тяги 340 ползунов и звена 341 управления шагом. Нижние ползуны 338 могут быть соединены с сервомеханизмом (не показан) для перемещения рычажных механизмов 332 автомата перекоса в осевом направлении внутри внутреннего канала 331 колонки 330. Верхние ползуны 339 шарнирно соединены со звеньями 341 управления шагом, которые передают осевое перемещение рычажных механизмов 332 автомата перекоса, также называемых ползунами 332 автомата перекоса, на автоматы 279, 280 перекоса. Тяга 340 ползуна изображена с резьбовыми концами и жестко соединяет верхний ползун 339 и нижний ползун 338 для их перемещения как единого целого.
[0132] Три сервомеханизма (не показаны), соединенные с нижними ползунами 338, могут взаимодействовать для перемещения трех рычажных механизмов 332 автомата перекоса для управления верхним автоматом 279 перекоса, и циклическим и общим шагом лопастей 20 несущего винта. Три дополнительных сервомеханизма (не показаны), соединенные с нижними ползунами 338, могут взаимодействовать для перемещения трех рычажных механизмов 332 автомата перекоса для управления нижним автоматом 280 перекоса, и циклическим и общим шагом лопастей 22 несущего винта. Несмотря на то, что они показаны на фигурах со звеном 341 управления шагом, рычажные механизмы 332 автомата перекоса могут также содержать Z-образное звено 291 вместо звена 341 управления шагом, в этом случае только три сервомеханизма могут быть необходимы для управления циклическим и общим шагом лопастей 20, 22 обоих несущих винтов.
[0133] Как показано на Фиг. 45 и Фиг. 46, винтокрылый летательный аппарат 350 по настоящему изобретению содержит обтекаемый фюзеляж или корпус 351, систему соосных несущих винтов противоположного направления вращения с лопастями несущих винтов противоположного направления вращения (не показана), способную создавать вертикальную подъемную силу, и обращенный назад винт 353, способный создавать горизонтальную тягу. Невращающийся остов или колонка 330 служит опорой для множества вращающихся выходных сервомеханизмов 354, расположенных за колонкой 330, и множества вращающихся выходных сервомеханизмов 355, расположенных перед колонкой 330. Сервомеханизмы 354, 355 расположены так, что находятся в непосредственной близости от продольно простирающейся плоскости, определенной общей осью 7 и продольной осью 356 для уменьшения площади лобовой поверхности сервомеханизмов 354, 355 при полете вперед на высокой скорости. Это уменьшает ширину кожуха (не показан, поскольку он подобен кожуху 257, показанному на Фиг. 27, и кожуху 368, показанному на Фиг. 48), необходимого для закрытия сервомеханизмов 354, 355 и снижения до минимума аэродинамического лобового сопротивления при полете вперед на высокой скорости. Отверстия 357 для болтов, как показано на Фиг. 46, выполнены для установки обтекаемого кожуха колонки, такого как кожух 257. Одной из особенностей изобретения является то, что элементы системы управления, такие как сервомеханизмы 354, 355, расположены впереди и за колонкой 330 для снижения до минимума ширины узла колонки и снижения лобового сопротивления при полете вперед.
[0134] Другой вариант осуществления винтокрылого летательного аппарата 360 показан, например, на Фиг. 47-57. Винтокрылый летательный аппарат 360 содержит обтекаемый фюзеляж или корпус 361, систему соосных несущих винтов противоположного направления вращения 362, 375, способную создавать вертикальную подъемную силу, и обращенный назад винт 353, способный создавать горизонтальную тягу. Невращающаяся колонка 364 служит опорой для ползуна колонки 366 и множества линейных (винтового типа) сервомеханизмов 365. В одном из примеров линейные (винтового типа) сервомеханизмы 365 могут представлять собой электрические линейные сервомеханизмы "Moog" модель 880, установленные на кронштейнах или консолях, простирающихся от них. Сервомеханизмы 365 выполнены так, что находятся в непосредственной близости от продольно простирающейся плоскости, определенной общей осью 7 и продольной осью 367, для уменьшения ширины и аэродинамического лобового сопротивления кожуха колонки 368 при полете вперед на высокой скорости. Двигатель 363, который может представлять собой, например, турбовальный двигатель GE Т700, предназначен для приведения во вращение верхнего несущего винта 362 вокруг общей оси 7 через редуктор 369, зубчатое колесо 370 привода верхнего несущего винта и трубчатый вал 379 верхнего несущего винта, а также для приведения во вращение нижнего несущего винта 375 через редуктор 369 и зубчатое колесо 371 привода нижнего несущего винта, прикрепленное к валу 380 нижнего несущего винта.
[0135] Одной из особенностей изобретения является то, что невращающаяся колонка 364 может служить опорой для составных частей летательного аппарата, расположенных внутри кожуха 368 колонки, для использования преимущества воздушного следа, создаваемого кожухом 368 колонки при полете вперед на высокой скорости. Электронные или гидравлические элементы 372, в том числе, например, гидравлические двигатели и гидравлические клапаны, или антенны 373 в некоторых вариантах осуществления настоящего изобретения, могут опираться на невращающийся кронштейн 374. Это уменьшает потребность в пространстве внутри корпуса 361, также называемого фюзеляжем 361, винтокрылого летательного аппарата 360 и приближает места установки электронных или гидравлических элементов к сервомеханизмам 365.
[0136] Невращающаяся колонка 364 может быть изготовлена из металла или углеволоконного композитного материала и имеет каналы 376, простирающиеся в осевом направлении вдоль внешней поверхности колонки 364 для размещения вкладных элементов 378 электрических шин, как показано на Фиг. 50-52. Вкладные элементы 378 электрических шин простираются от точки 390, расположенной между верхним и нижним несущими винтами 362, 375, до точки 391, расположенной под нижним несущим винтом 375, и между редуктором 370 привода верхнего несущего винта и редуктором 371 привода нижнего несущего винта, для упрощения передачи электрической и/или гидравлической энергии и сигналов от элементов, расположенных в фюзеляже 361 винтокрылого летательного аппарата 360, к другим элементам, расположенным между верхним несущим винтом 362 и нижним несущим винтом 375 или выше верхнего несущего винта 362. Вкладные элементы 378 электрических шин могут содержать защитную оболочку, выполненную из непроводящего материала, такого как силикон, и могут содержать множество медных проводников или гибких трубопроводов 382. В одном из вариантов осуществления настоящего изобретения ползун 366 колонки скользит по колонке 364 для обеспечения опоры для сервомеханизмов 365 и кронштейна 374 и гладкой внешней беговой поверхности для автоматов 384, 385 перекоса. В ползуне 366 колонки могут быть выполнены отверстия 387 для обеспечения доступа к медным проводникам или гибким трубопроводам 382 для выполнения электрических или гидравлических соединений (не показаны) с другими составными частями, такими как сервомеханизмы 365 и электронное оборудование системы управления полетом (не показано). При работе множество электрических проводов и/или гидравлических гибких трубопроводов (для ясности не показаны) могут быть подключены к вкладным элементам 378 шин, медным проводникам или гибким трубопроводам 382 для передачи электрической или гидравлической энергии и сигналов на и от другие(их) элементы(ов) системы управления, такие(их) как компьютер системы управления полетом (не показан), сервоприводы (не показаны), гидравлический двигатель 372, гидравлические клапаны (не показаны) и генераторы (не показаны). Прочная конструкция 388 в виде фермы может быть установлена для присоединения колонки 364 к фюзеляжу 361 винтокрылого летательного аппарата 360.
[0137] Одной из важных особенностей настоящего изобретения является снижение аэродинамического лобового сопротивления при полете на высокой скорости. Для уменьшения ширины и соответствующего лобового сопротивления кожуха 368 колонки, автоматы 384, 385 перекоса выполнены так, что все шесть сервомеханизмов 365 расположены в непосредственной близости от простирающейся продольно плоскости, определенной общей осью 7 и продольной осью 367, как показано на Фиг. 53. Рычаги 392 и 393 автомата перекоса расположены ближе друг к другу, чем рычаги 393 и 394. Как показано на Фиг. 54, угол 395 составляет приблизительно 90 градусов или менее. Автоматы 384, 385 перекоса также повернуты на 180 градусов один относительно другого вокруг общей оси 7 так, что сервомеханизмы 365 могут быть размещены вокруг ползуна 366 колонки, чередуясь друг с другом, образуя очень компактную конструкцию.
[0138] Одной из особенностей изобретения является невращающаяся пустотелая каркасная труба 40, колонка 330, 364 или остов в виде крестообразной балки, которые в некоторых вариантах осуществления настоящего изобретения могут выполнять вторую функцию в качестве канала для электропроводки и системы трубопроводов. Способ или система сборки механических и электрических элементов в каркасной трубе, или остове, предназначены для упрощения сборки различных летательных аппаратов из набора базовых модулей.
[0139] Другой особенностью является то, что каждый из несущих винтов 20, 22 соосной системы по настоящему изобретению приводится в действие одним или более отдельными электрическими двигателями, и эти двигатели расположены так, что находятся с противоположных сторон несущих винтов с передачей энергии к двигателям и между ними, которую осуществляют через электропроводку (проходящую через пустотелый внутренний объем) вместо механических валов, муфт и редукторов. Компактные узлы несущих винтов служат опорой несущих винтов, предназначенной для их вращения, без потребности в известной вращающейся соосной системе валов.
[0140] Еще одной особенностью является то, что для каждого несущего винта могут быть предусмотрены система управления автоматом перекоса и один или более электрических двигателей, которые могут быть расположены так, что находятся с противоположных сторон каждого несущего винта, тем самым упрощая выполнение механических и электрических соединений, необходимых для приведения в действие несущих винтов и управления ими. Модули несущего винта предназначены для быстрой и простой сборки систем несущего винта на пустотелой детали. Управление несколькими модулями несущего винта и автоматами перекоса осуществляется единой группой сервомеханизмов, расположенных в модуле.
[0141] Другой особенностью настоящего изобретения является наличие звеньев фазового управления для осуществления раздельного фазового управления верхним и нижним несущими винтами одновременно. В некоторых вариантах осуществления настоящего изобретения звенья управления с фиксированной фазой могут обеспечивать управление общим и циклическим шагом обоих несущих винтов со всего лишь тремя сервомеханизмами управления несущими винтами вместо четырех-шести сервомеханизмов, необходимых для управления соосными несущими винтами в большинстве случаев.
[0142] Другой особенностью настоящего изобретения является то, что управление общим и циклическим шагом лопастей верхнего и нижнего несущих винтов вертолета соосной схемы может быть полностью осуществлено сервомеханизмами, расположенными ниже нижнего несущего винта, так что осевое расстояние между верхними и нижними лопастями может быть минимизировано.
[0143] Еще одной особенностью настоящего изобретения является то, что обтекаемая невращающаяся обшивка корпуса может быть установлена между лопастями верхнего и нижнего несущих винтов вертолета соосной схемы для снижения лобового сопротивления при полете вперед на высокой скорости.
[0144] Еще одной особенностью одного из вариантов осуществления настоящего изобретения является то, что энергия и сигналы управления могут поступать из точки, расположенной ниже лопастей нижнего несущего винта, в точку, расположенную между лопастями несущего винта, для упрощения расположения элементов системы управления несущими винтами, радиоэлектронного оборудования, антенн и других электрических систем и систем управления между лопастями несущего винта для эффективного использования пространства между лопастями и самих лопастей при полете вперед на высокой скорости.
[0145] Еще одной особенностью одного из вариантов осуществления настоящего изобретения является то, что лопасти 20 верхнего несущего винта могут приводиться во вращение трубчатым валом 254, расположенным внутри трубы 253 колонки и соединенным с электрическим или другим двигателем 54, расположенным ниже лопастей 22 несущего винта. При необходимости и верхний, и нижний несущие винты могут быть приведены во вращение одним расположенным ниже несущих винтов двигателем внутреннего сгорания.
[0146] Кроме того, особенностью является то, что складывающиеся лопасти 148, 149 винта имеют неодинаковую длину. В соответствии с настоящим изобретением при несущих винтах 3, 5 противоположного направления вращения складывающиеся лопасти 148, 149 неодинаковой длины уменьшают вероятность того, что лопасти будут контактировать одна с другой при их складывании при высокой частоте вращения во время аварийной посадки.
[0147] Другой особенностью является то, что опорная конструкция помещена между несущими винтами 20, 22 противоположного направления вращения для того, чтобы служить опорой обшивки 11 корпуса или другого вида аэродинамического обтекателя между лопастями 20, 22 несущего винта. Обшивка 11 корпуса защищает узел 255 управления от атмосферных воздействий, и уменьшает сопротивление воздуха сервомеханизмам 58, 59, автоматам 56', 57' перекоса и звеньям 125, 126 управления шагом, также называемым тягами 125, 126.
[0148] Другой особенностью настоящего изобретения является способ повышения количества энергии на единицу массы и удельной мощности на БПЛА, которые могут содержать бустерный модуль 8, выполненный так, что может быть отделен от основного летательного аппарата в полете. Бустерный модуль 8 обеспечивает работу БПЛА во время первой фазы полета. В конце первой фазы полета бустерный модуль отделяется, тем самым уменьшая вес БПЛА, для продолжения работы на второй фазе полета. На электрических БПЛА энергетический модуль может содержать блок батарей, имеющий или не имеющий вспомогательные поверхности, создающие подъемную силу, сбрасываемый в полете после исчерпания энергии батарей электропитания, или полезный груз, специальный для конкретных задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПАРИРОВАНИЯ КРУТЯЩЕГО МОМЕНТА ТАРЕЛКИ АВТОМАТА ПЕРЕКОСА | 2006 |
|
RU2397113C2 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2015 |
|
RU2629635C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| ЛОПАСТЬ НЕСУЩЕГО ВИНТА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С УЛУЧШЕННЫМИ ЛЕТНО-ТЕХНИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ | 2013 |
|
RU2631758C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СБЛИЖЕНИЯ ЛОПАСТЕЙ НЕСУЩИХ ВИНТОВ СООСНОГО ВЕРТОЛЕТА | 2021 |
|
RU2772464C1 |
| ВТУЛКА ВИНТА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ ТАКОЙ ВТУЛКИ ВИНТА | 2013 |
|
RU2531858C1 |
| СИСТЕМА ПРИВОДА НЕСУЩИХ ВИНТОВ И УПРАВЛЕНИЯ ИМИ ДЛЯ ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2377161C2 |
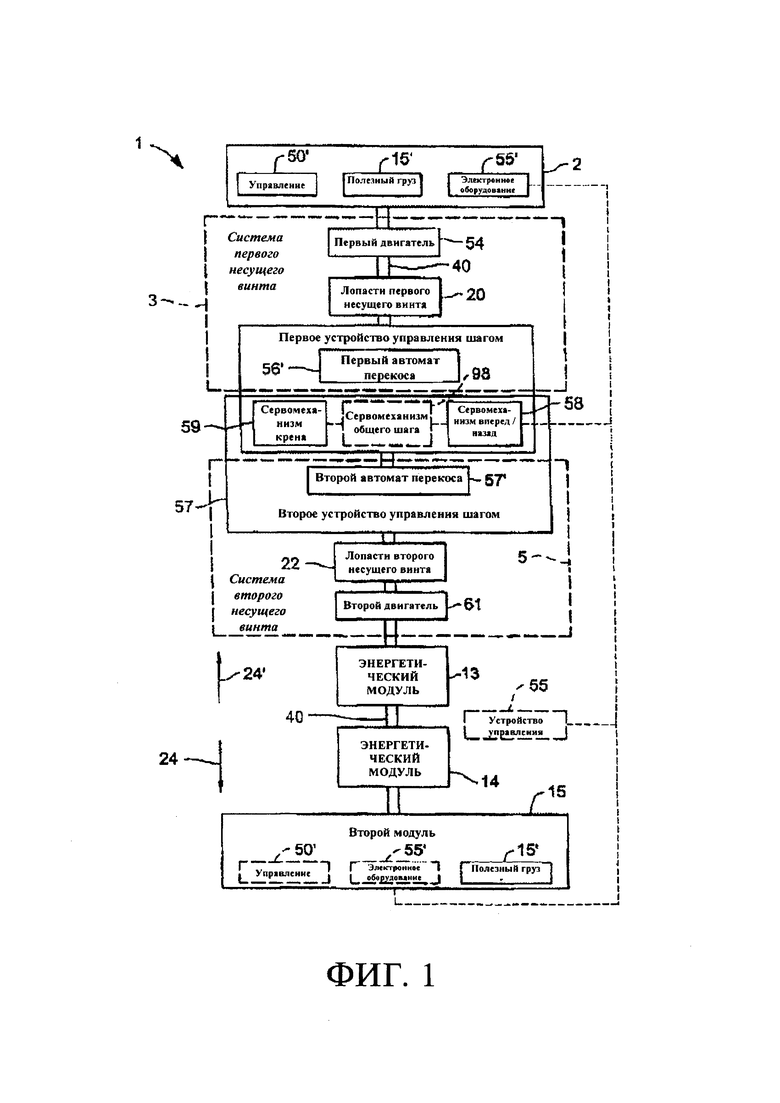
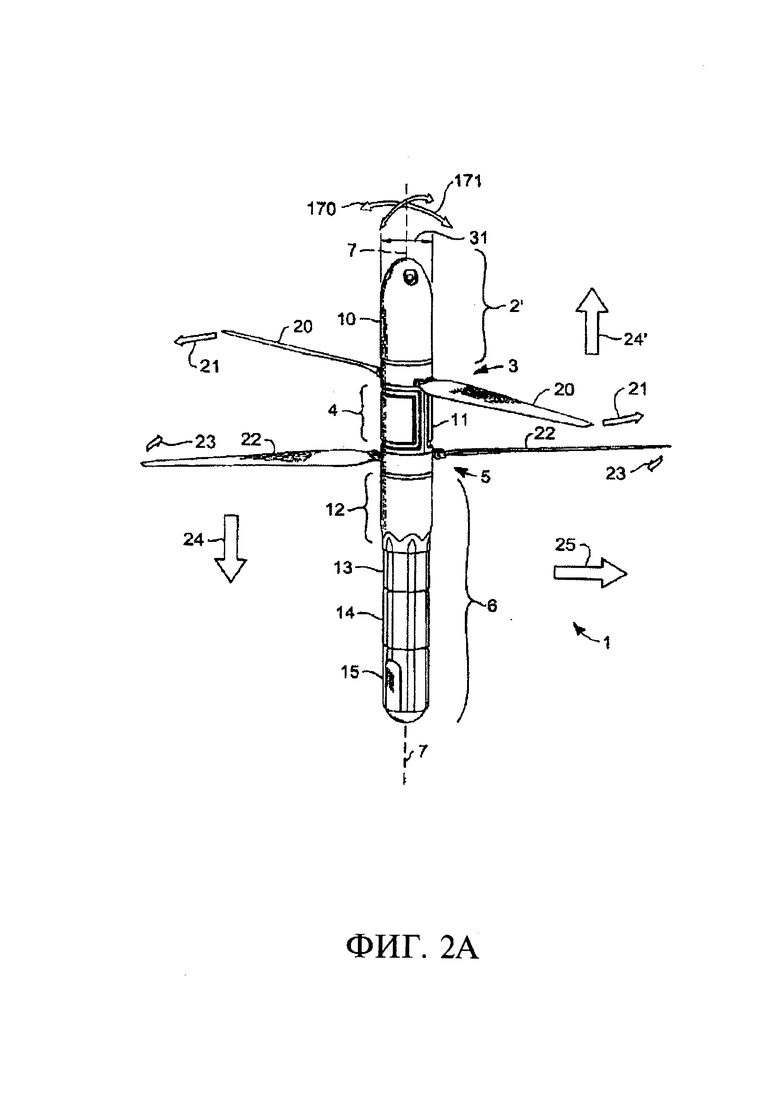
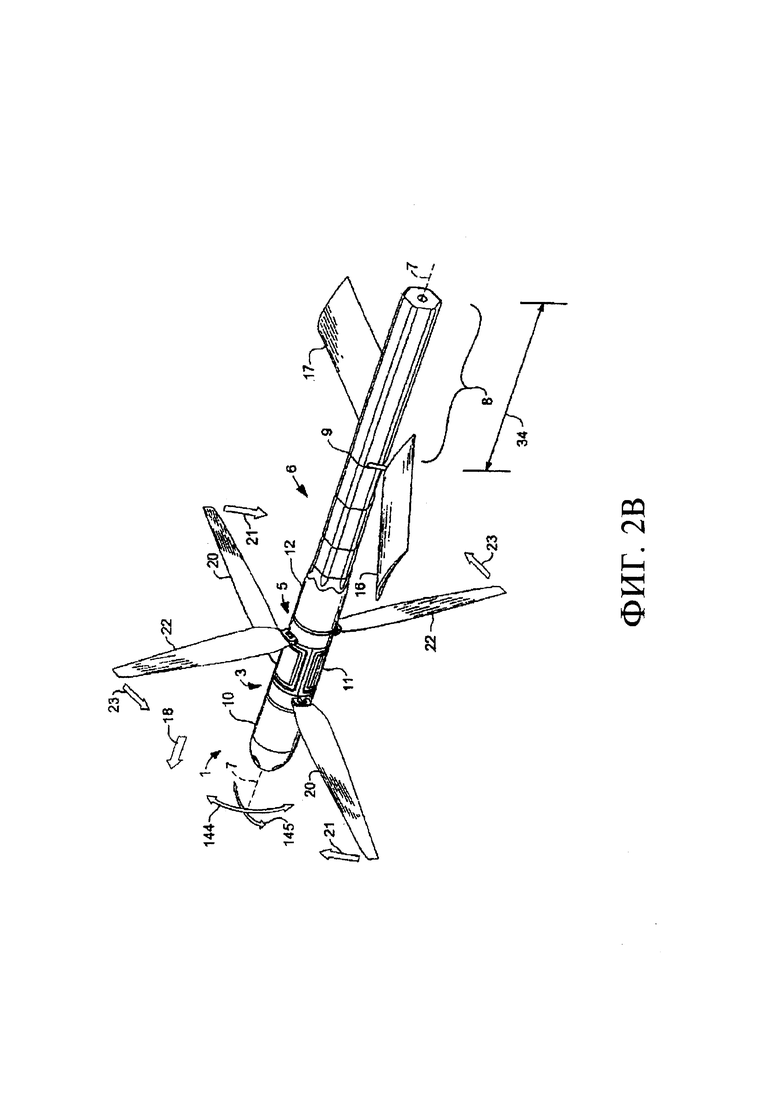
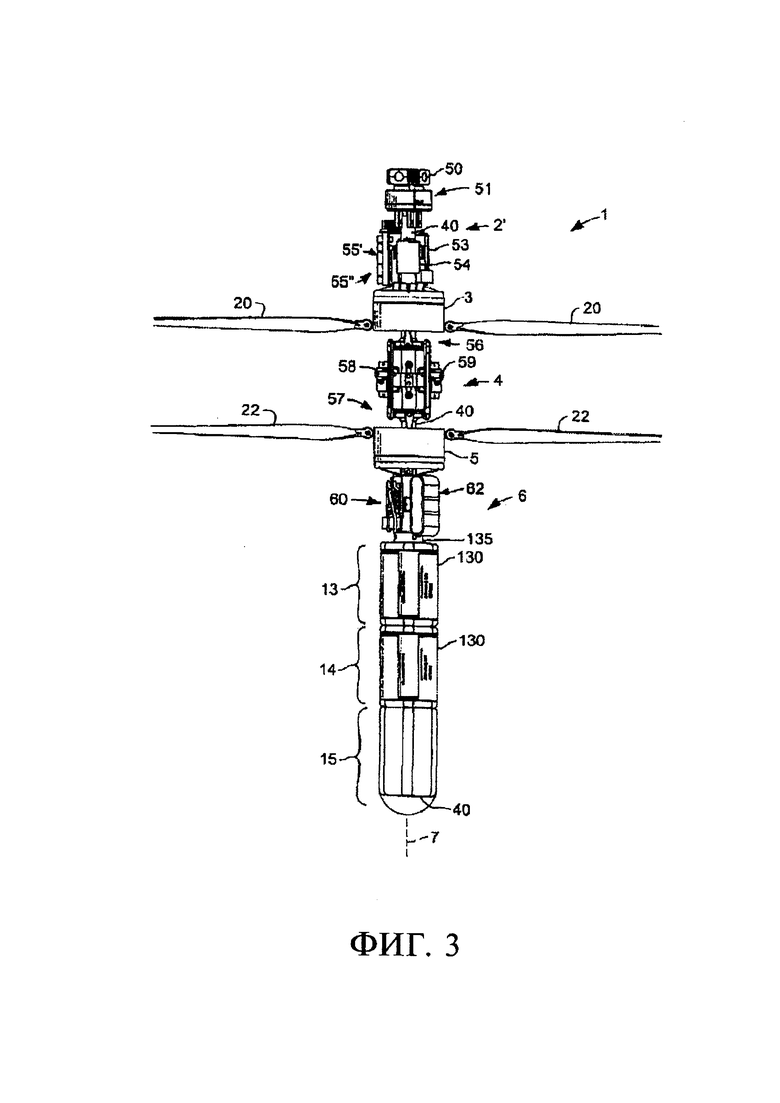
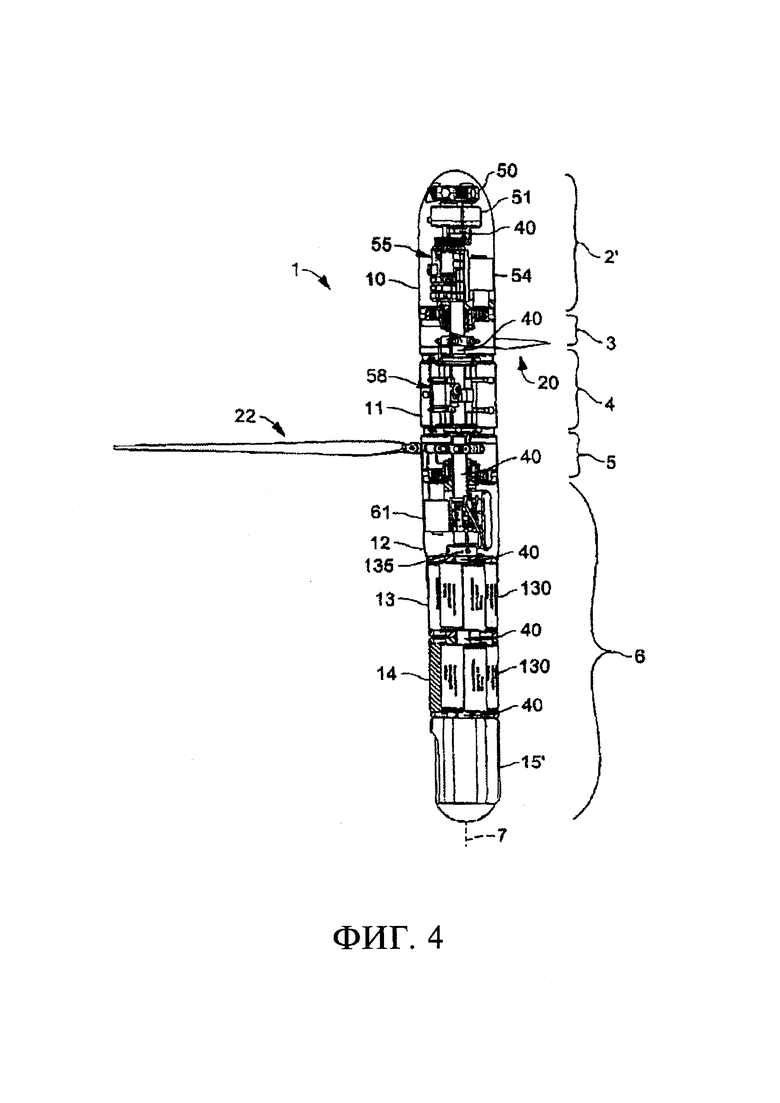
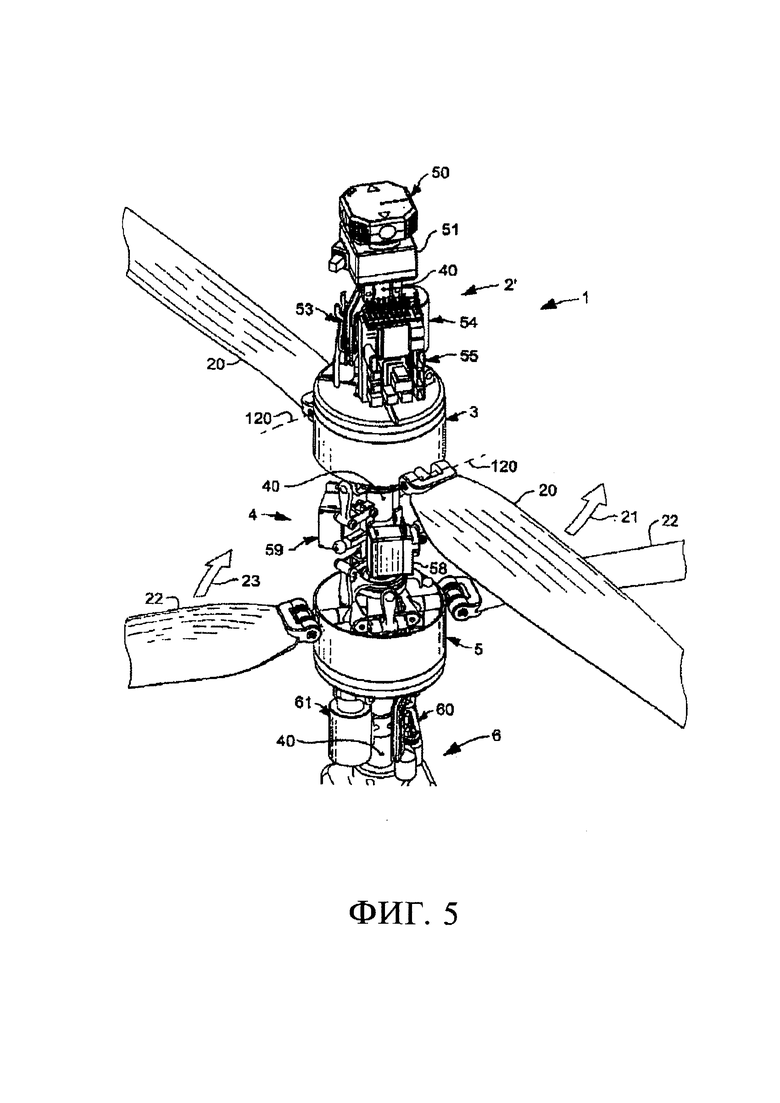
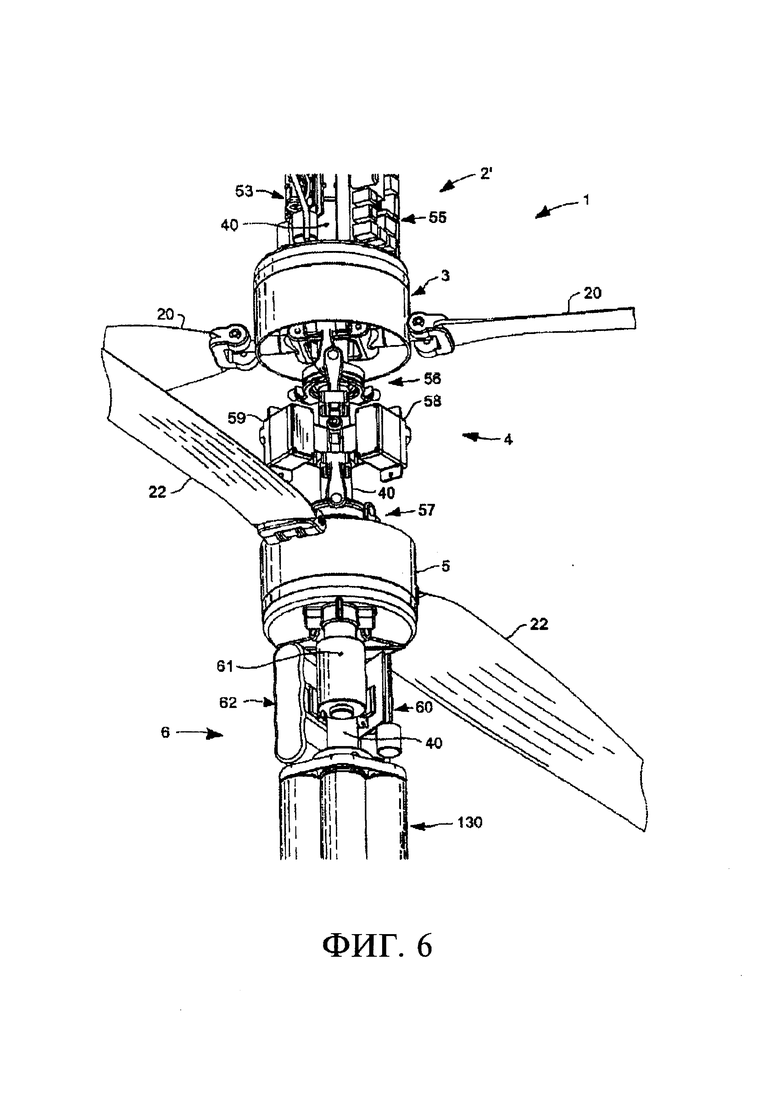

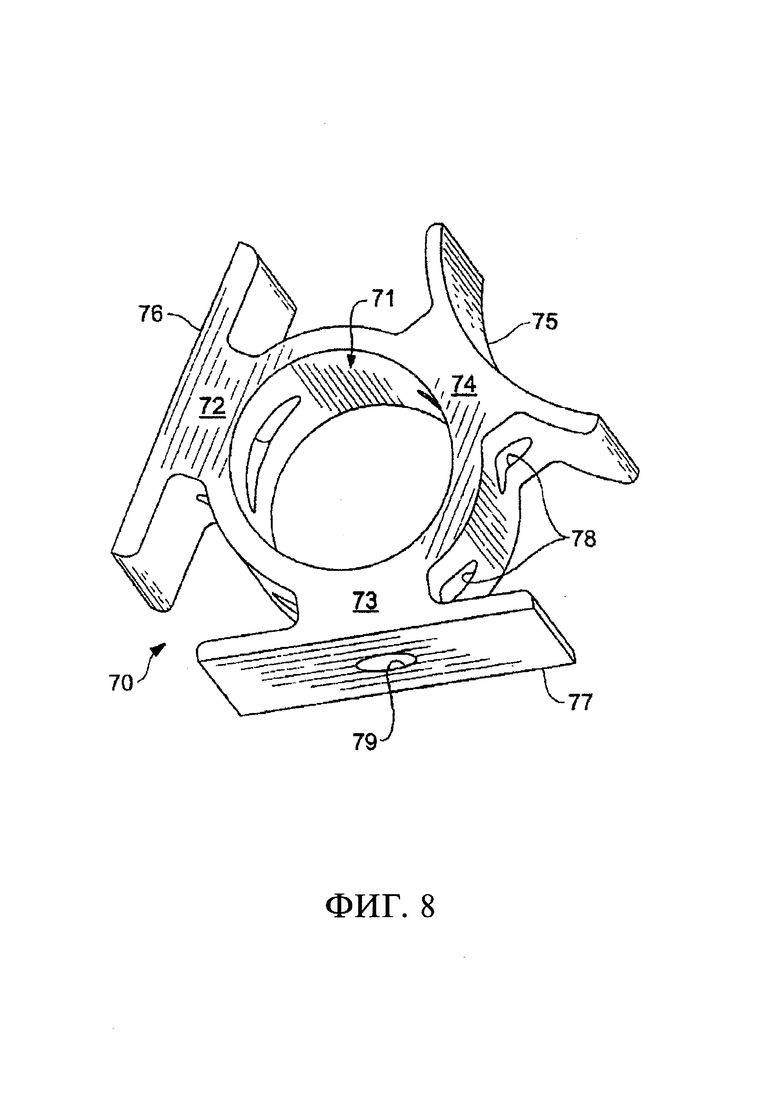
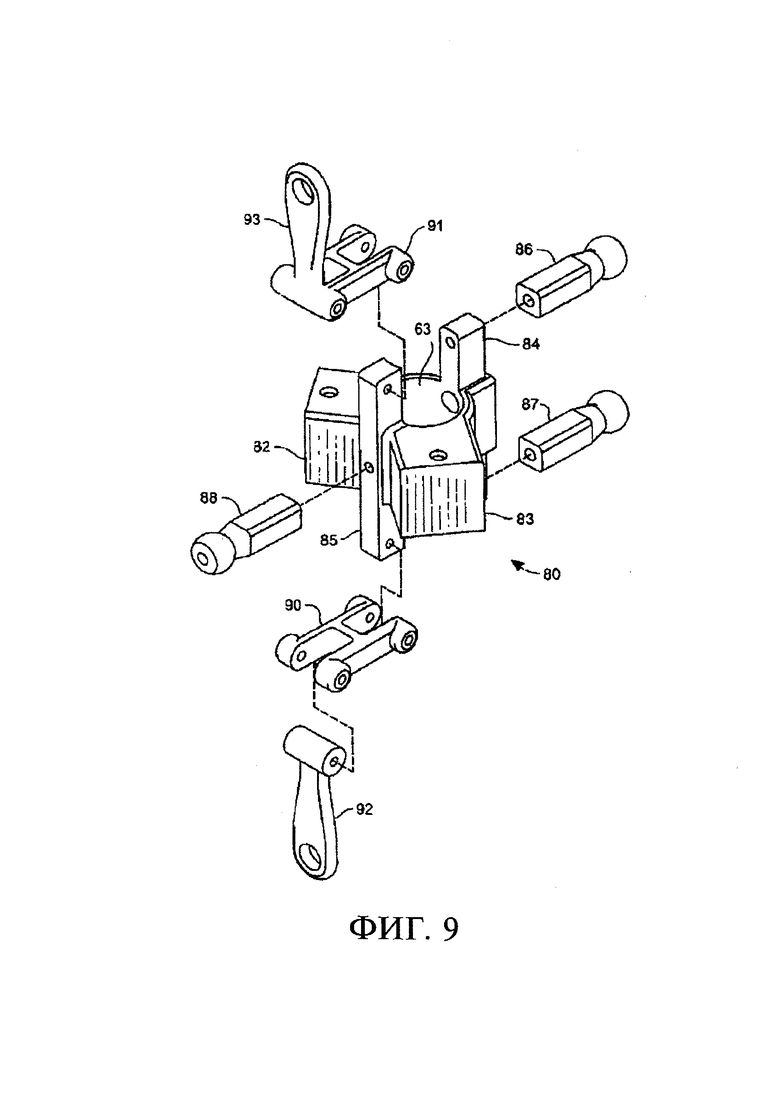
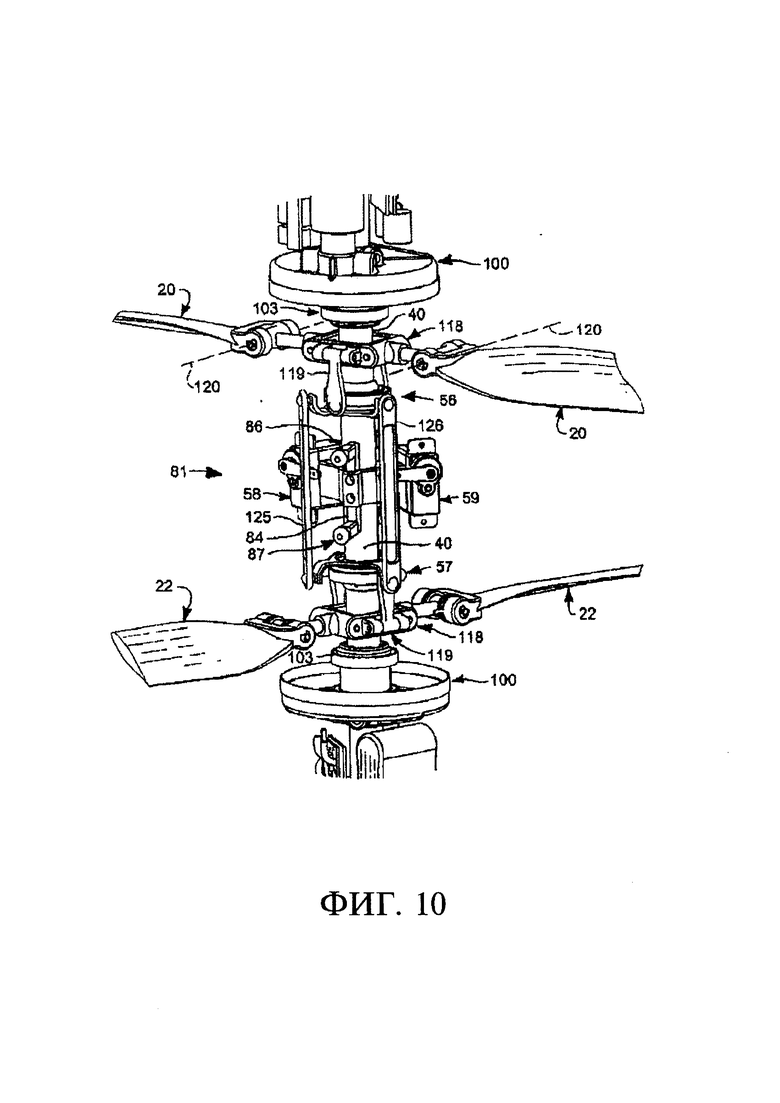
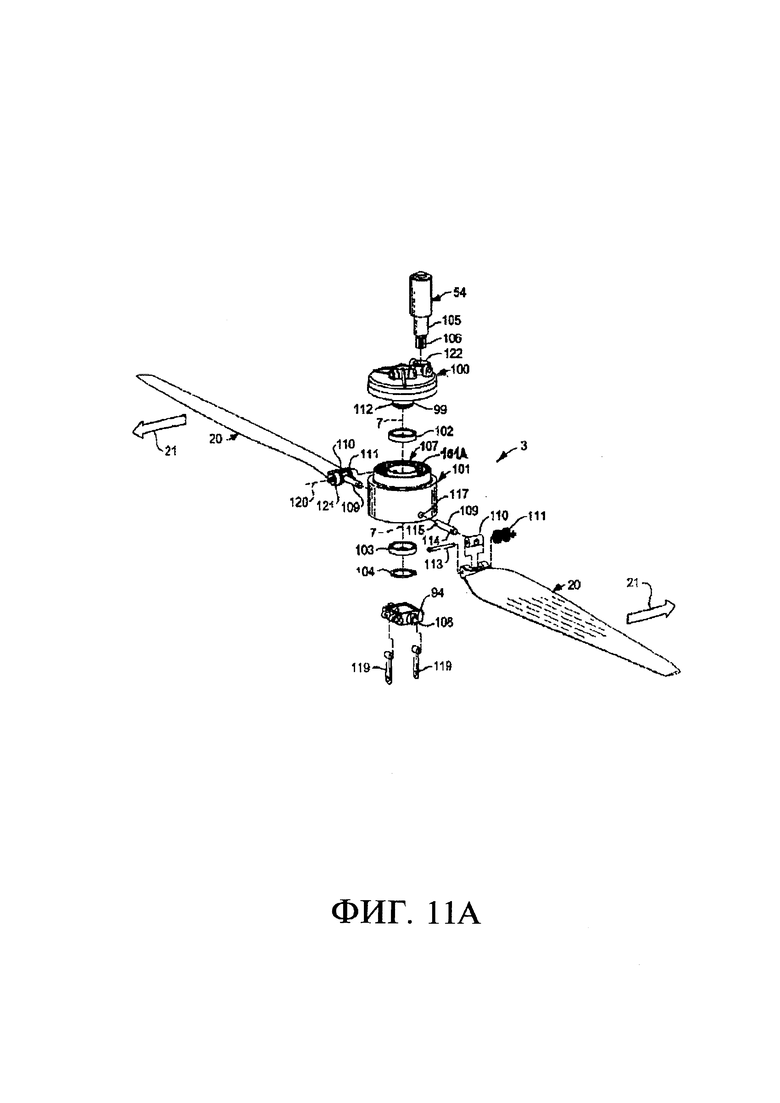
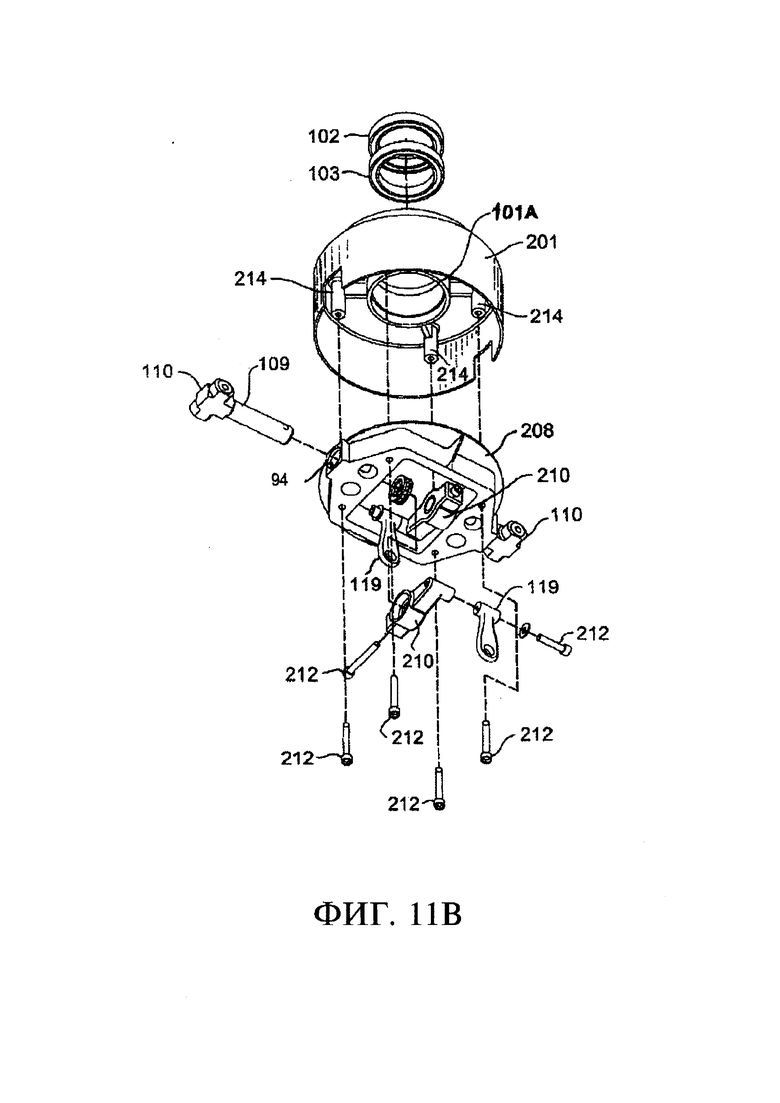
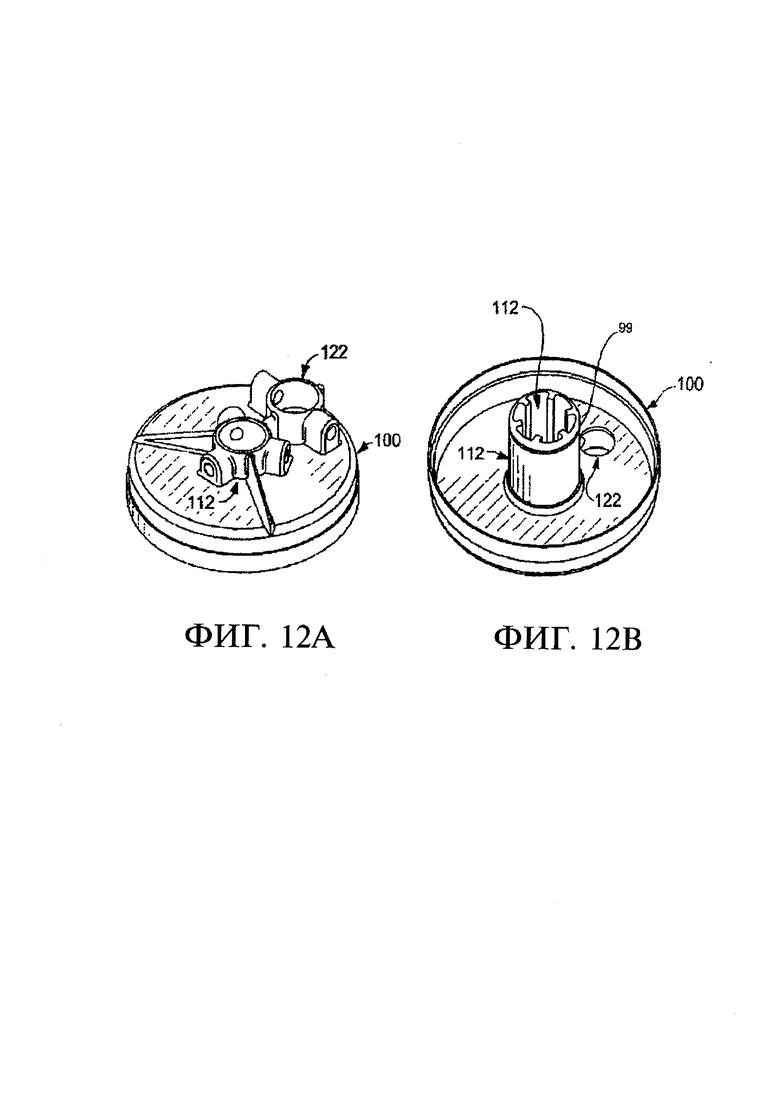
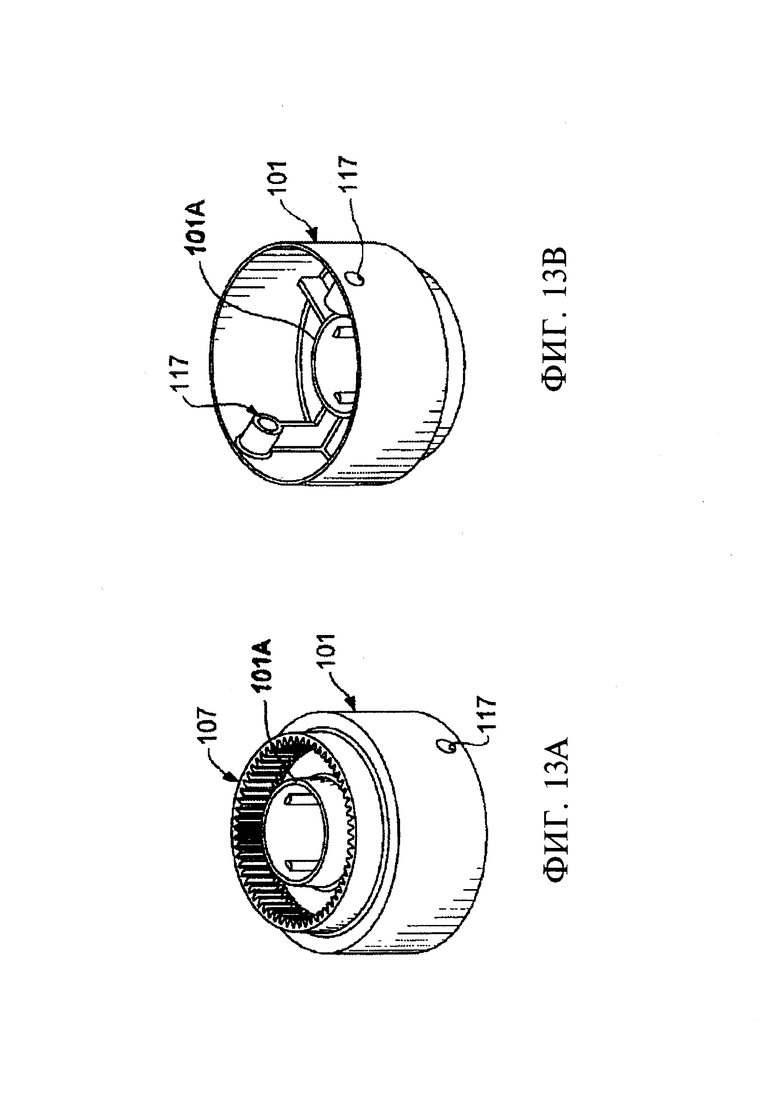
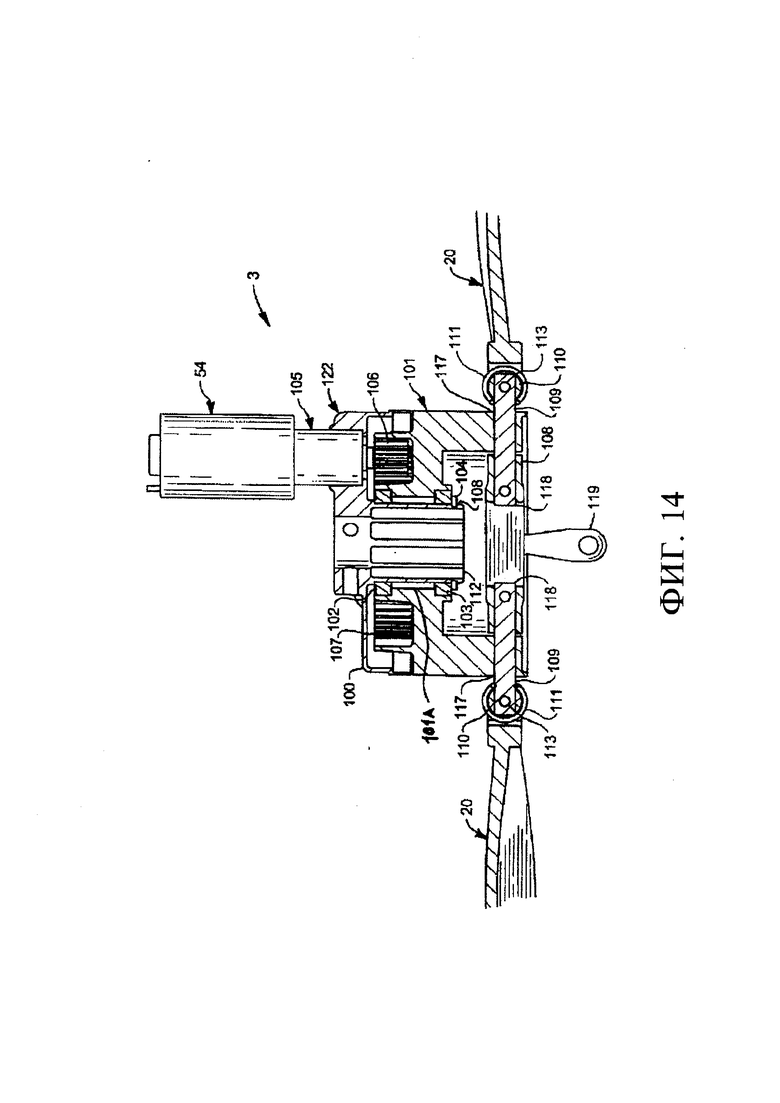
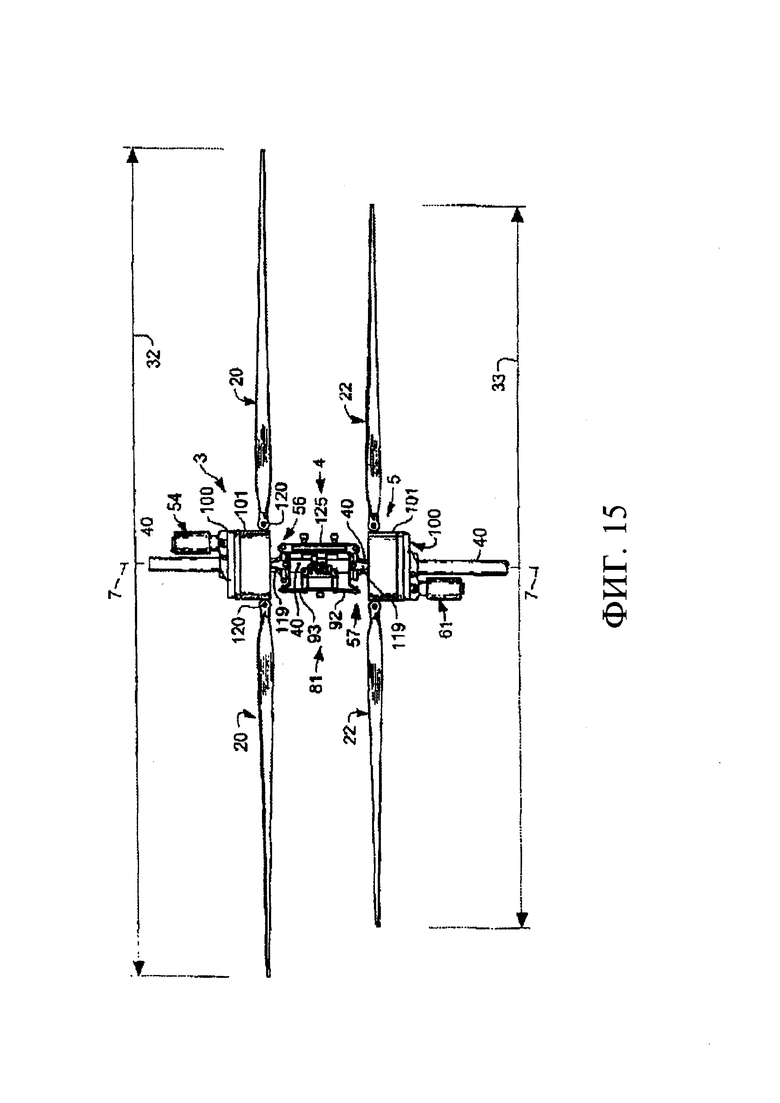
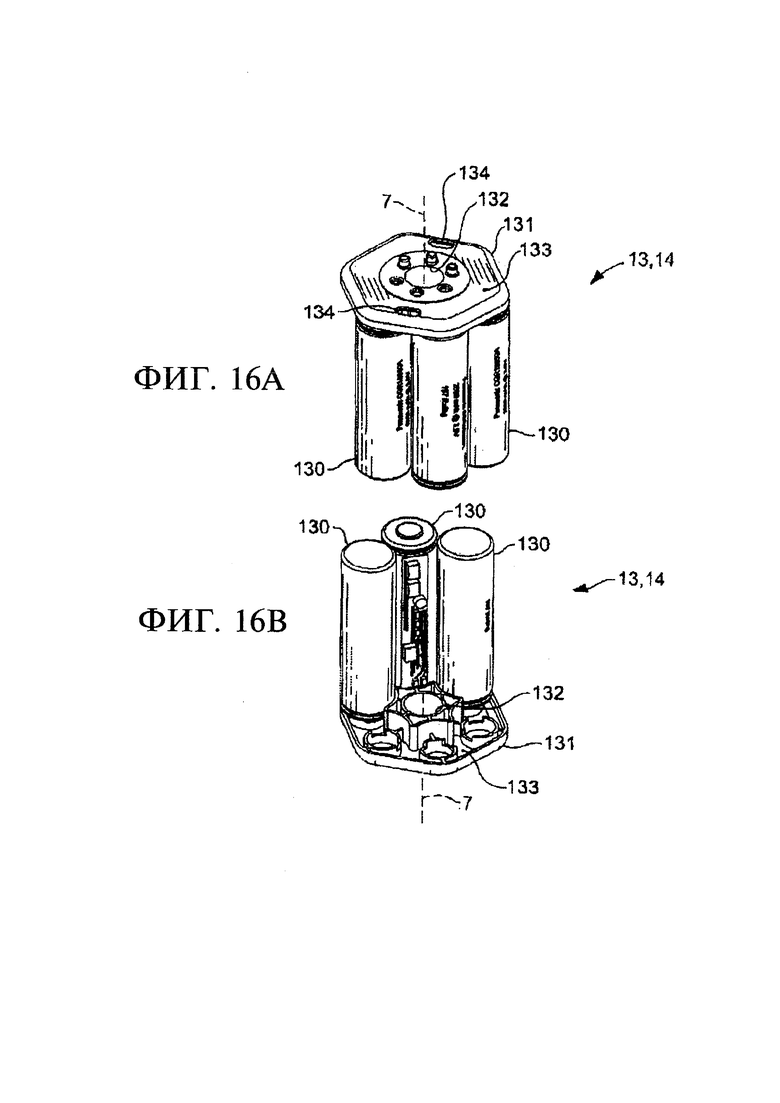
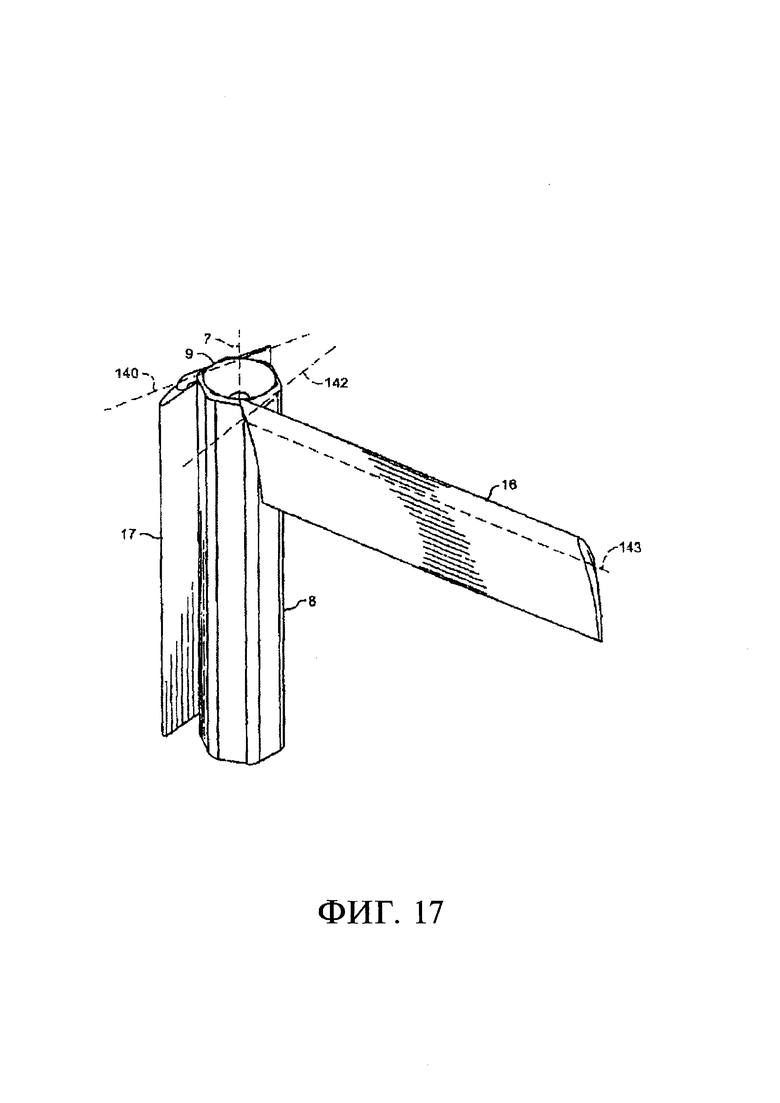

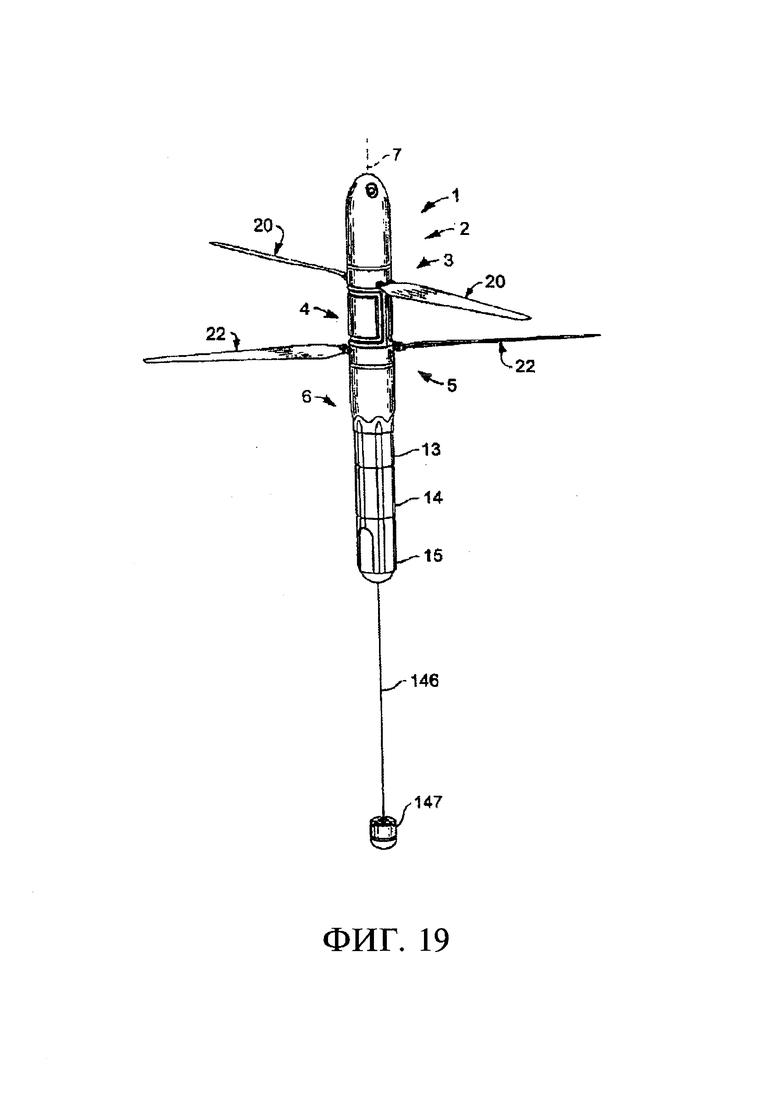
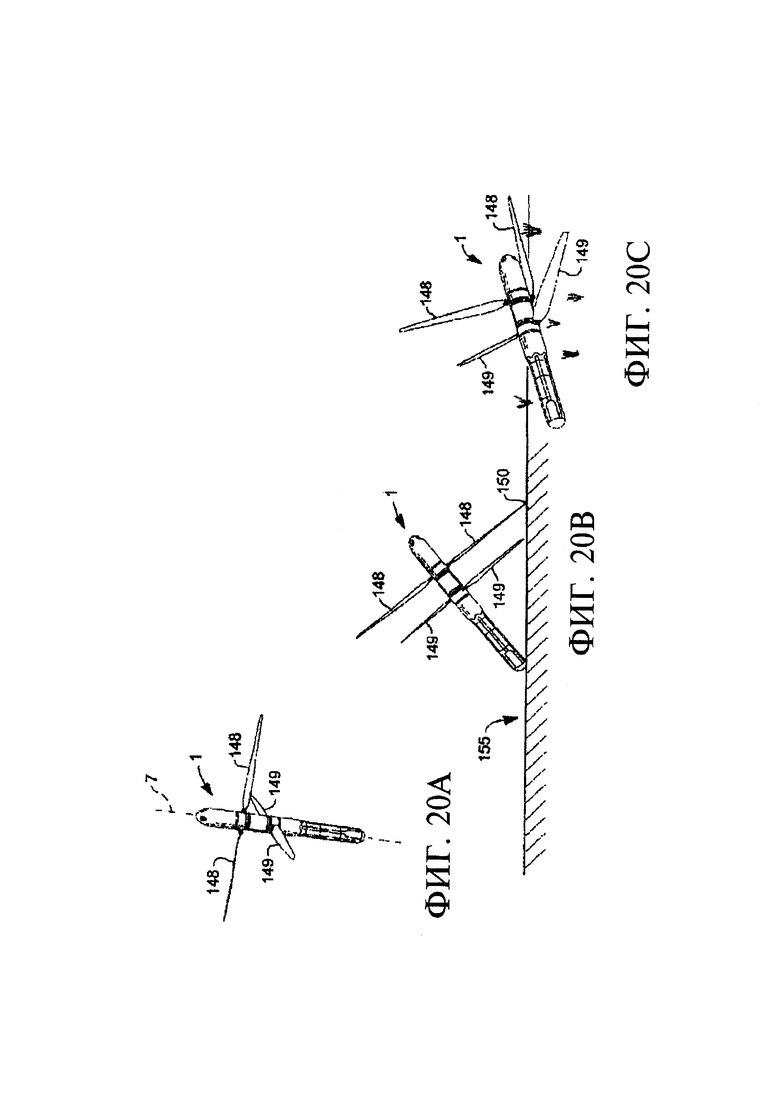

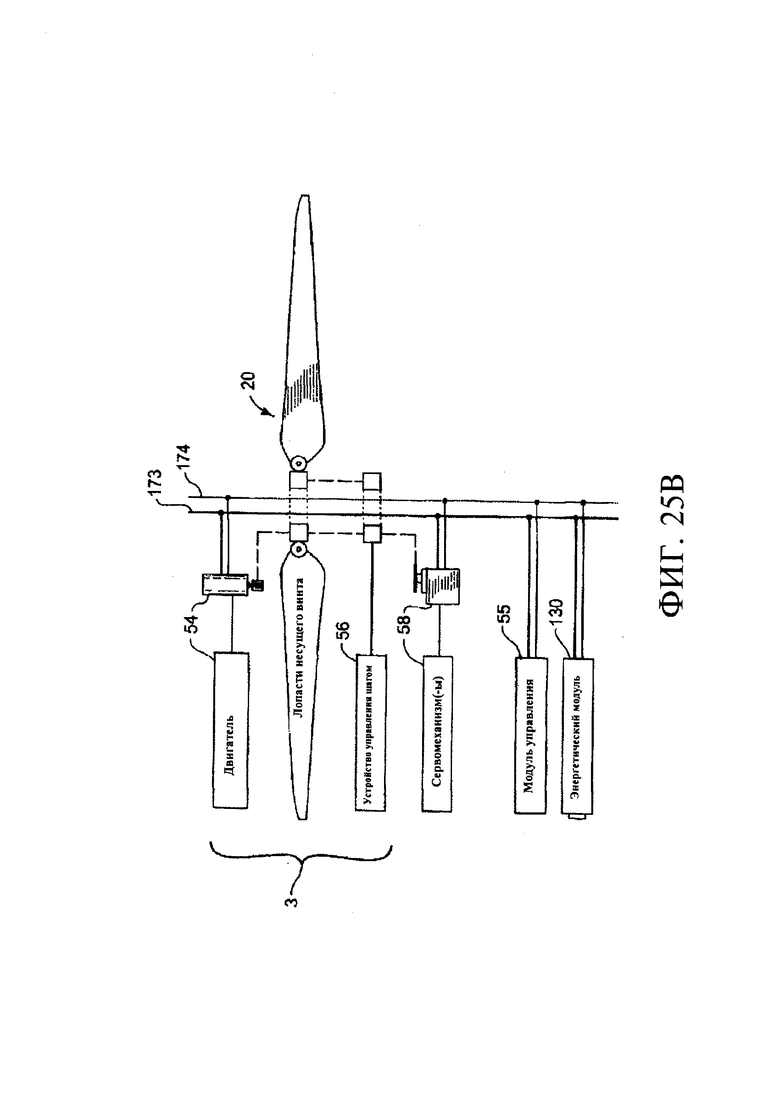
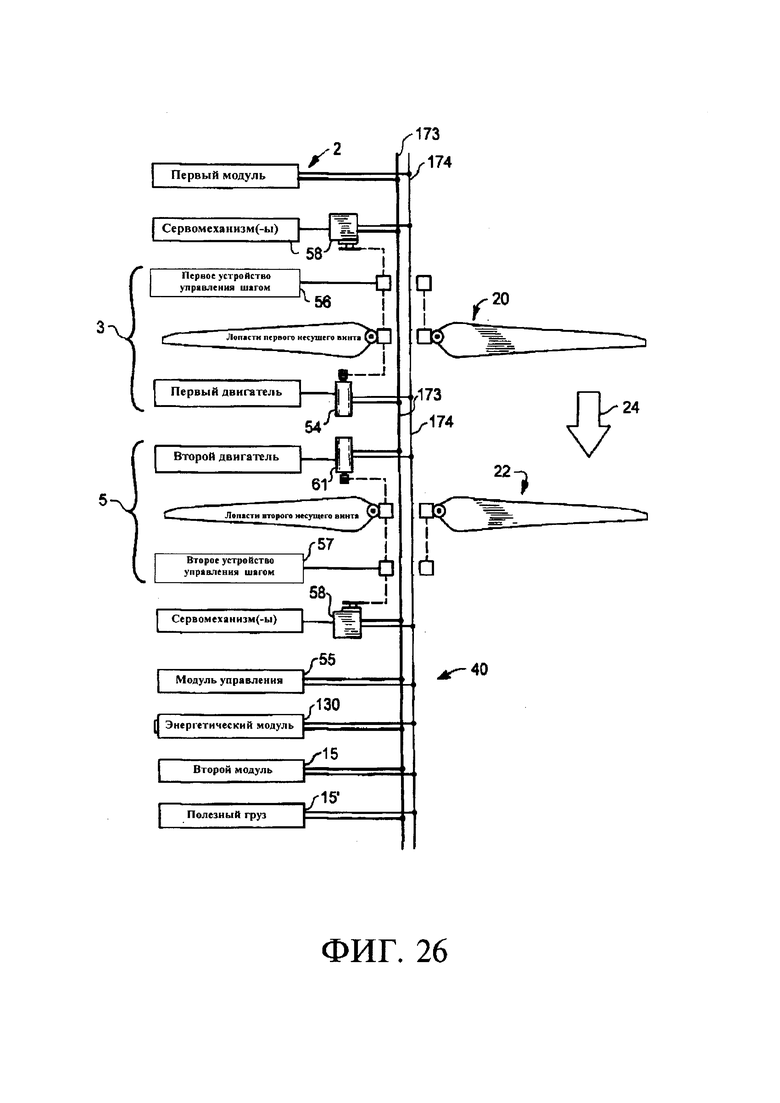
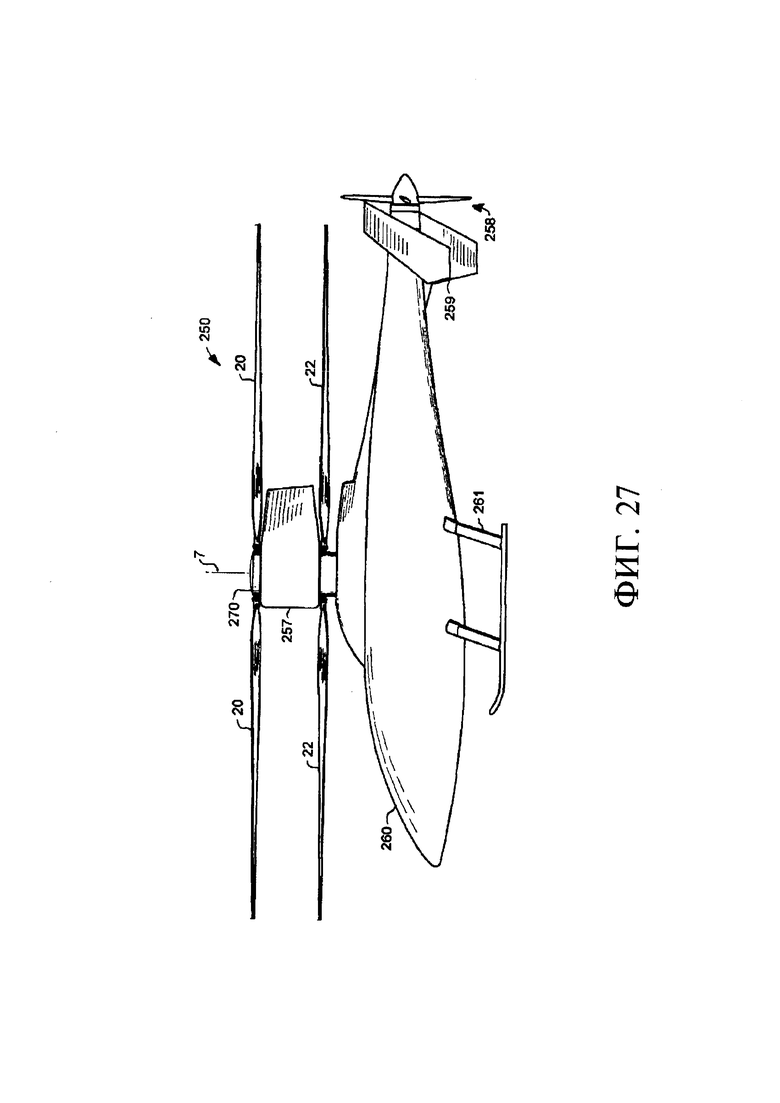
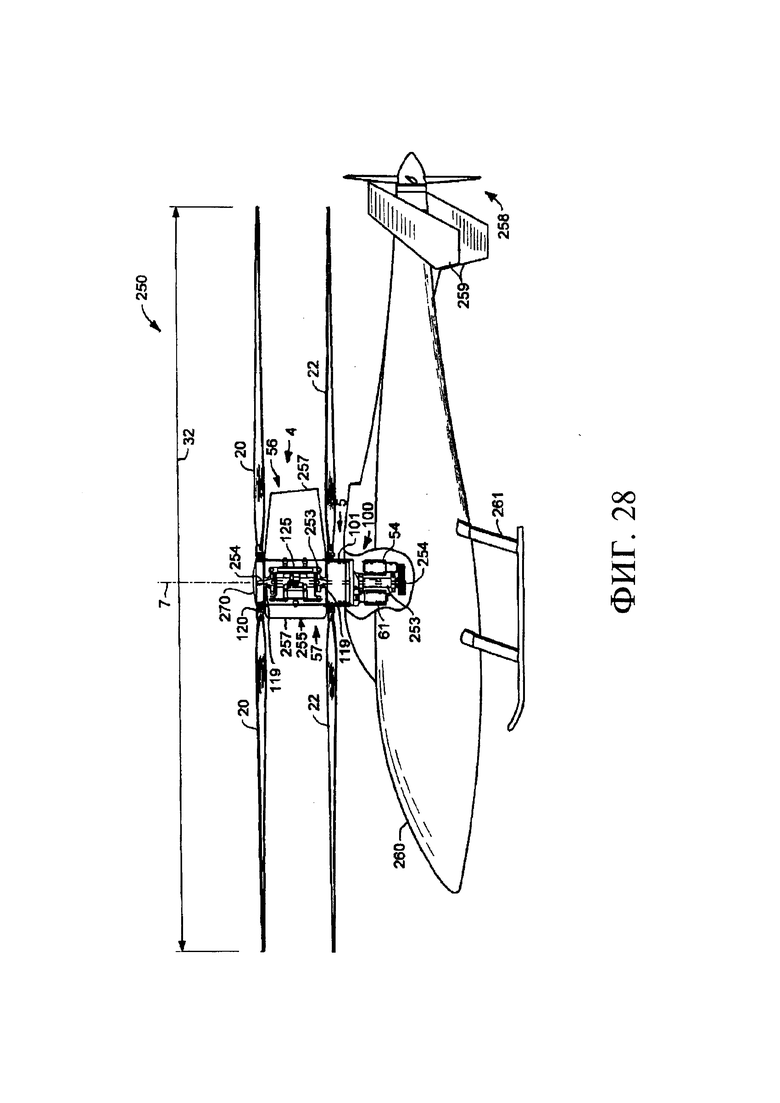
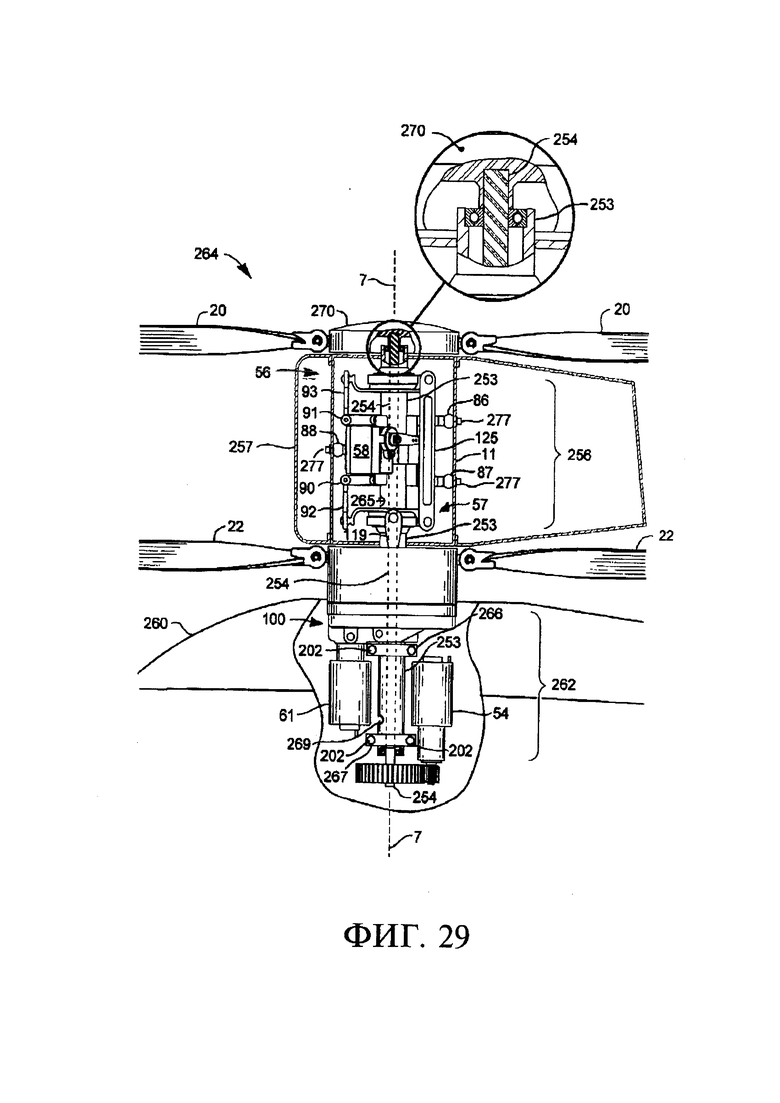
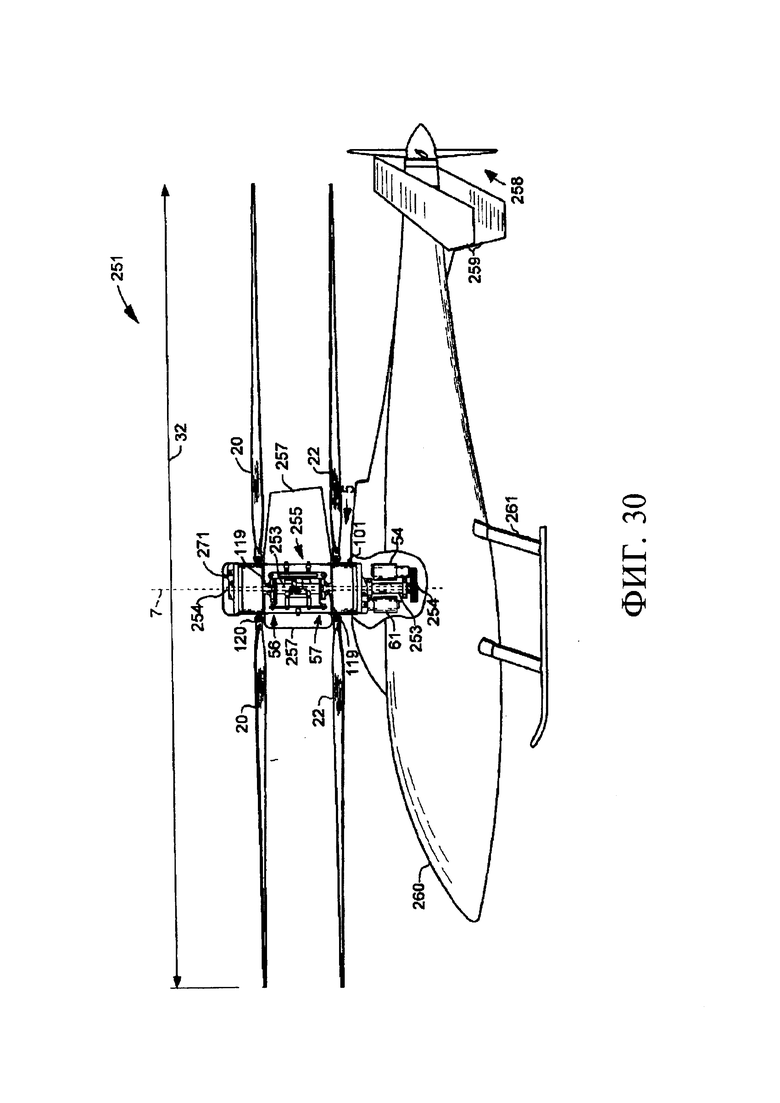
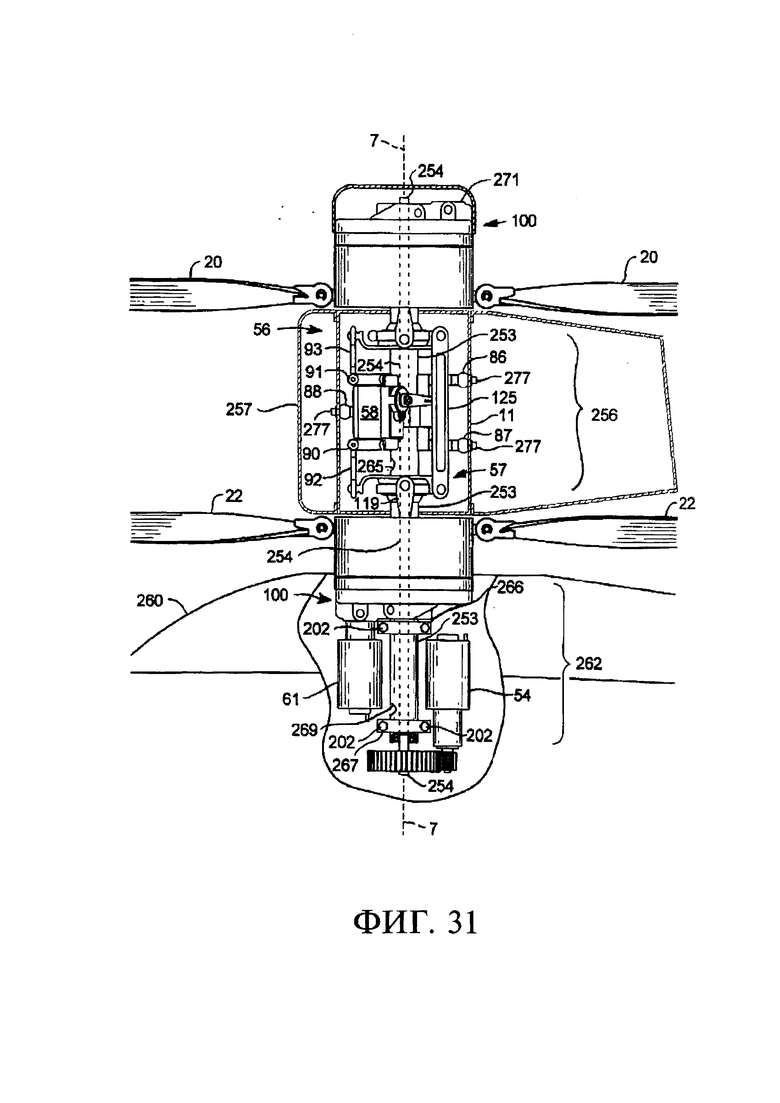
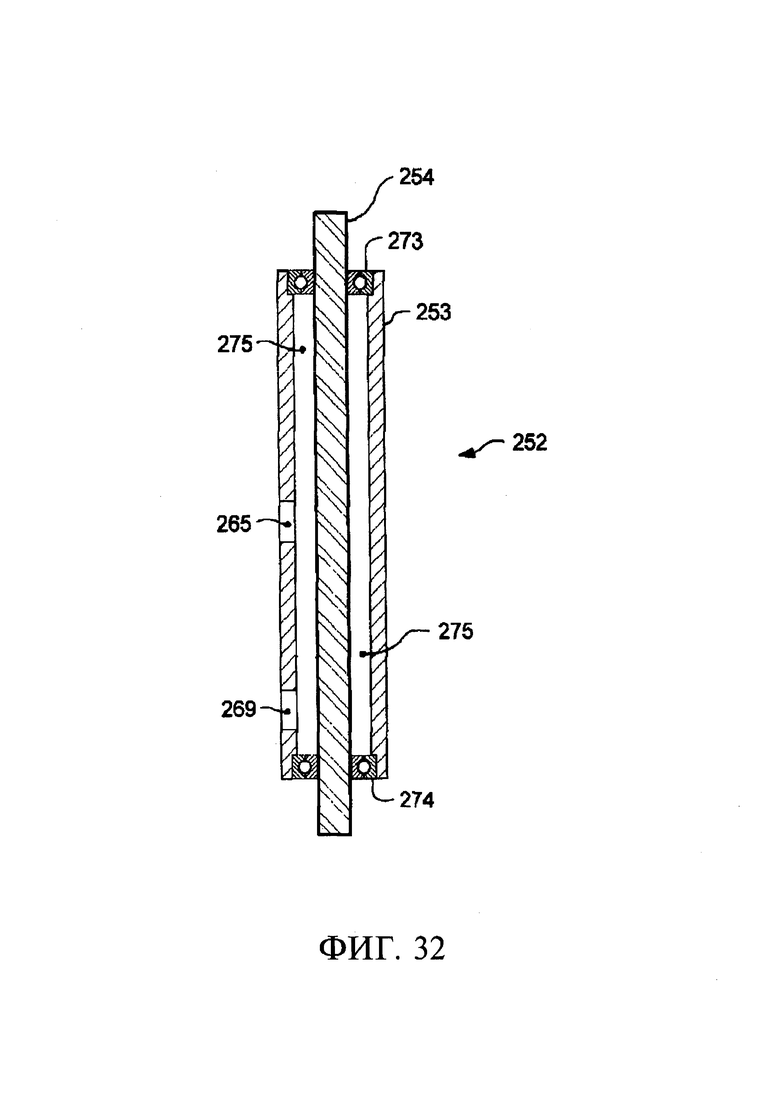
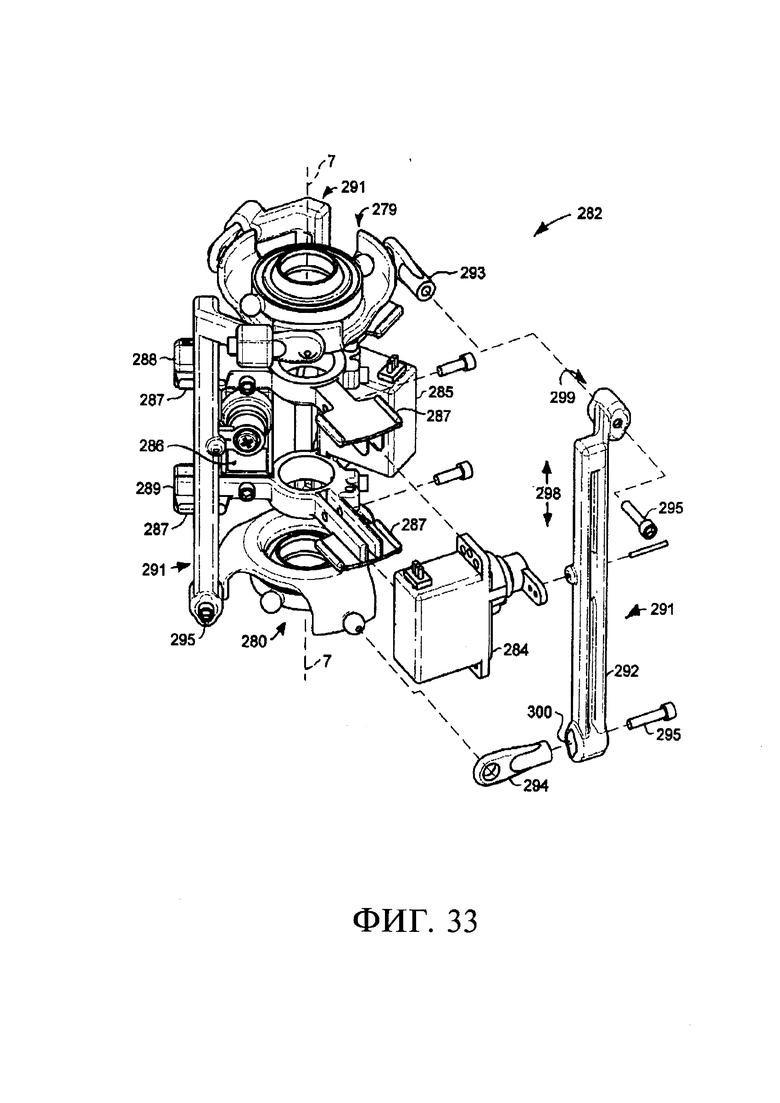
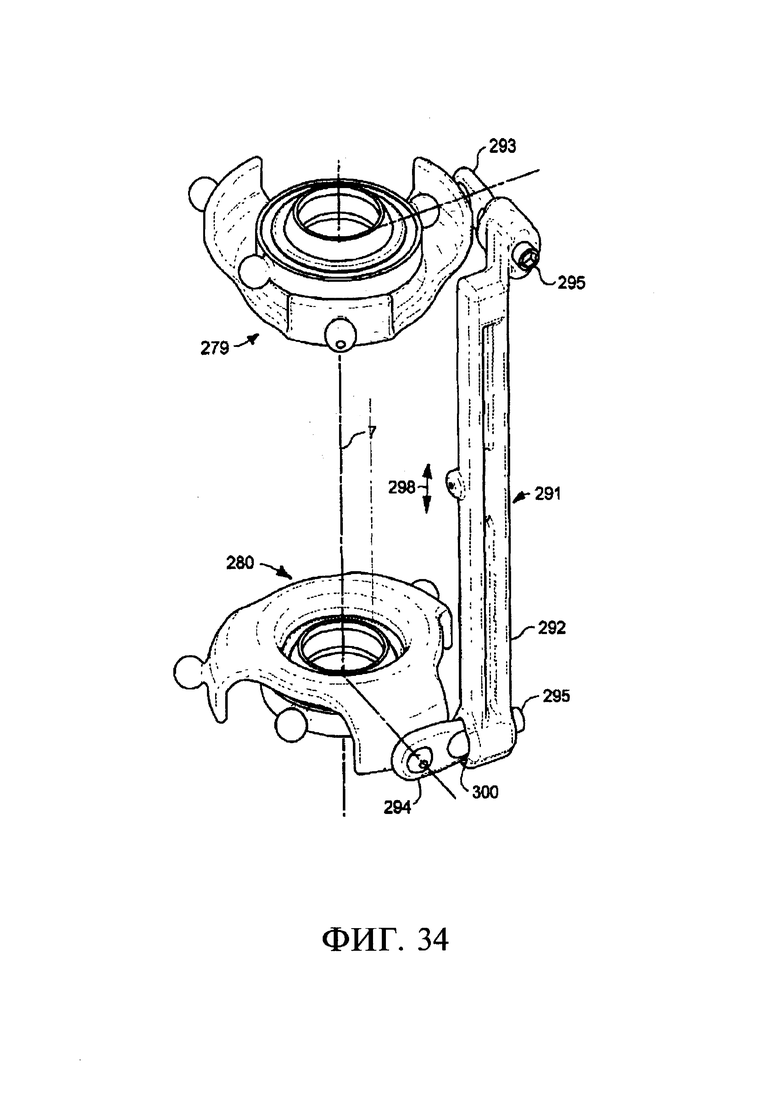

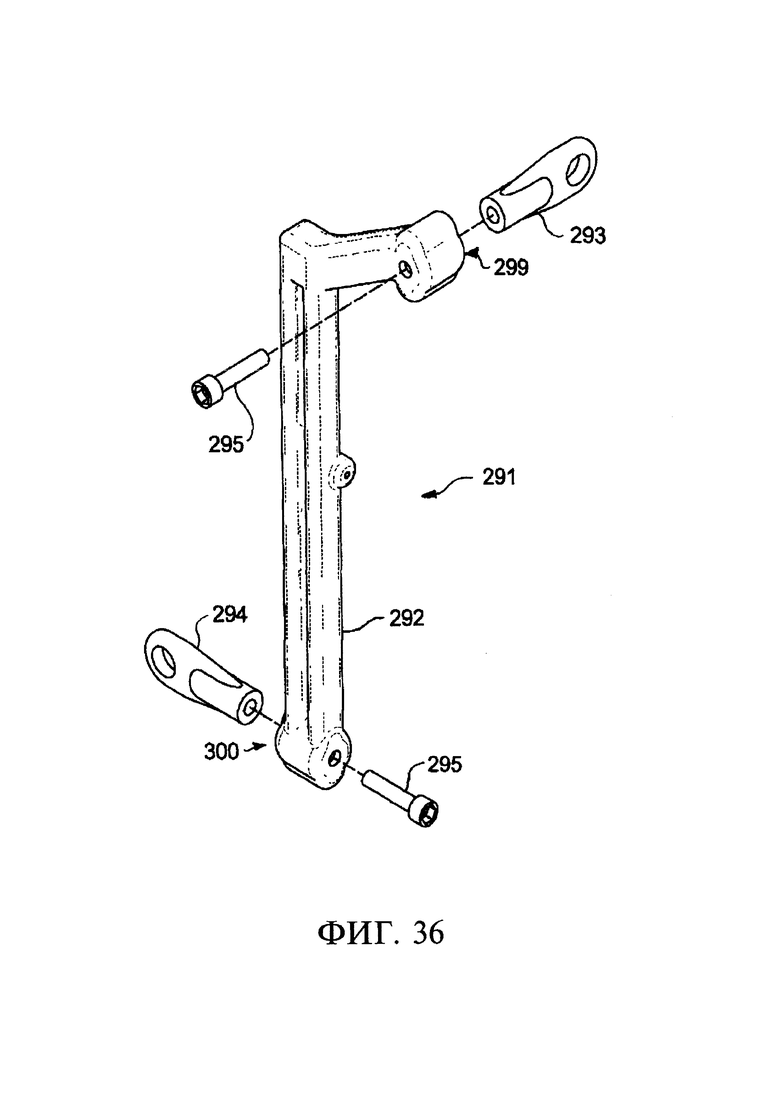

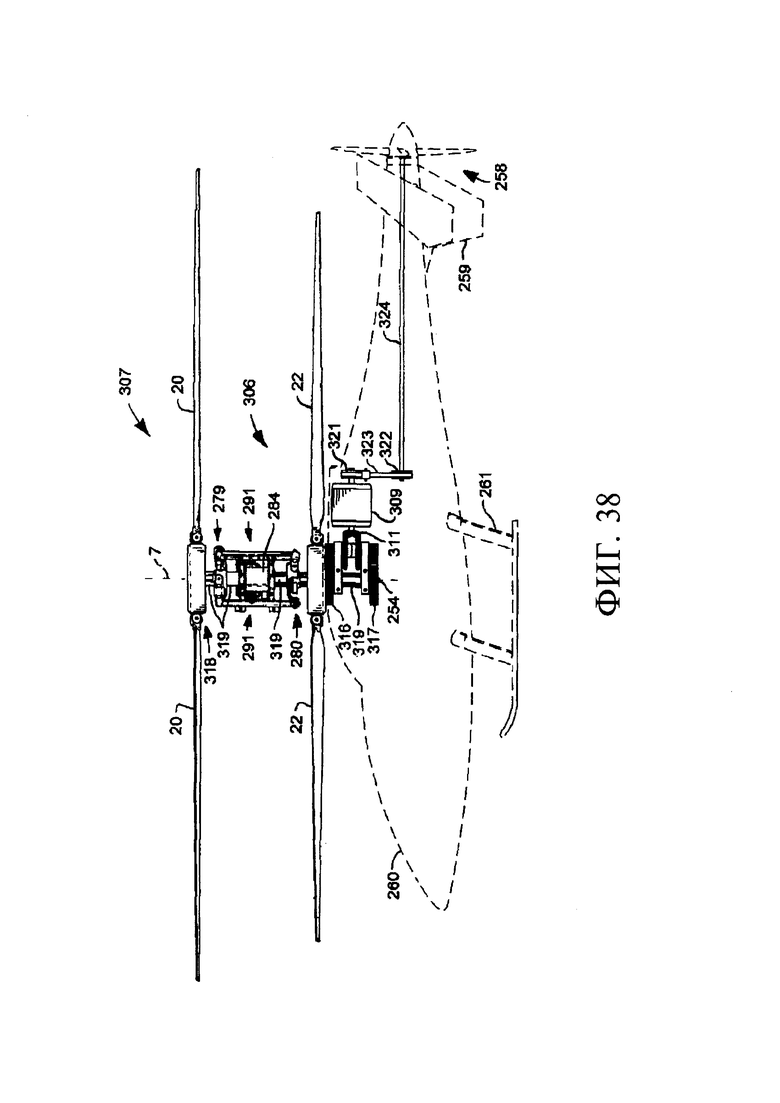
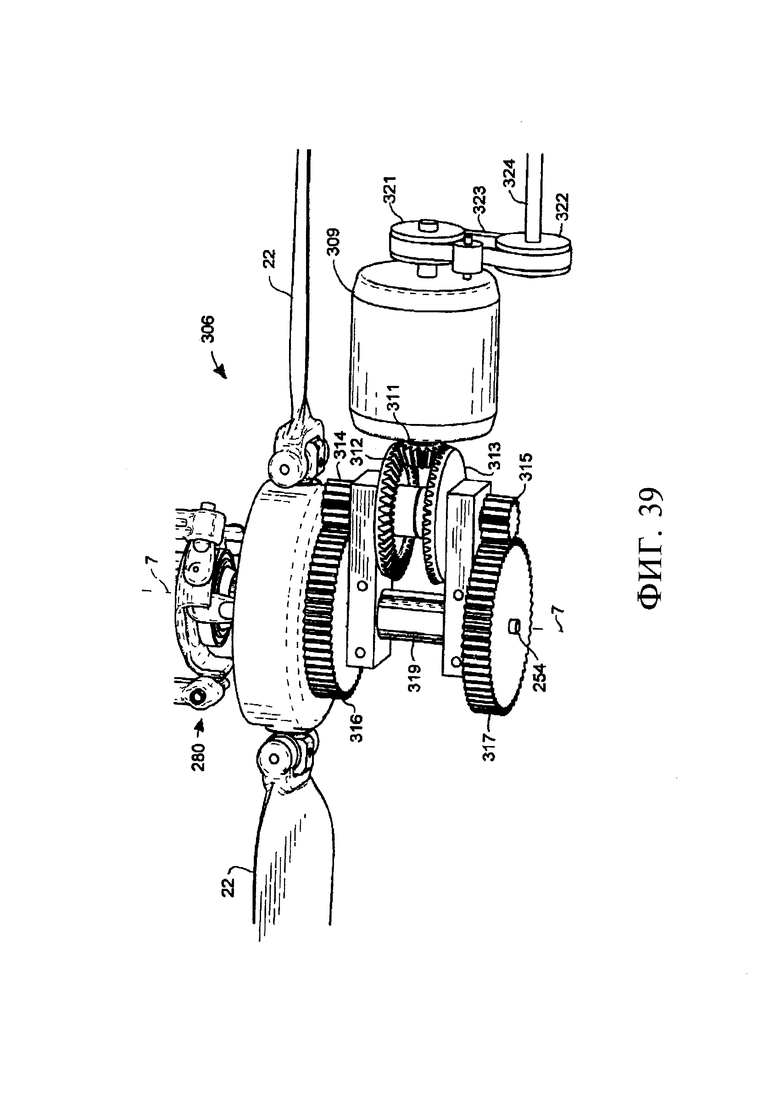
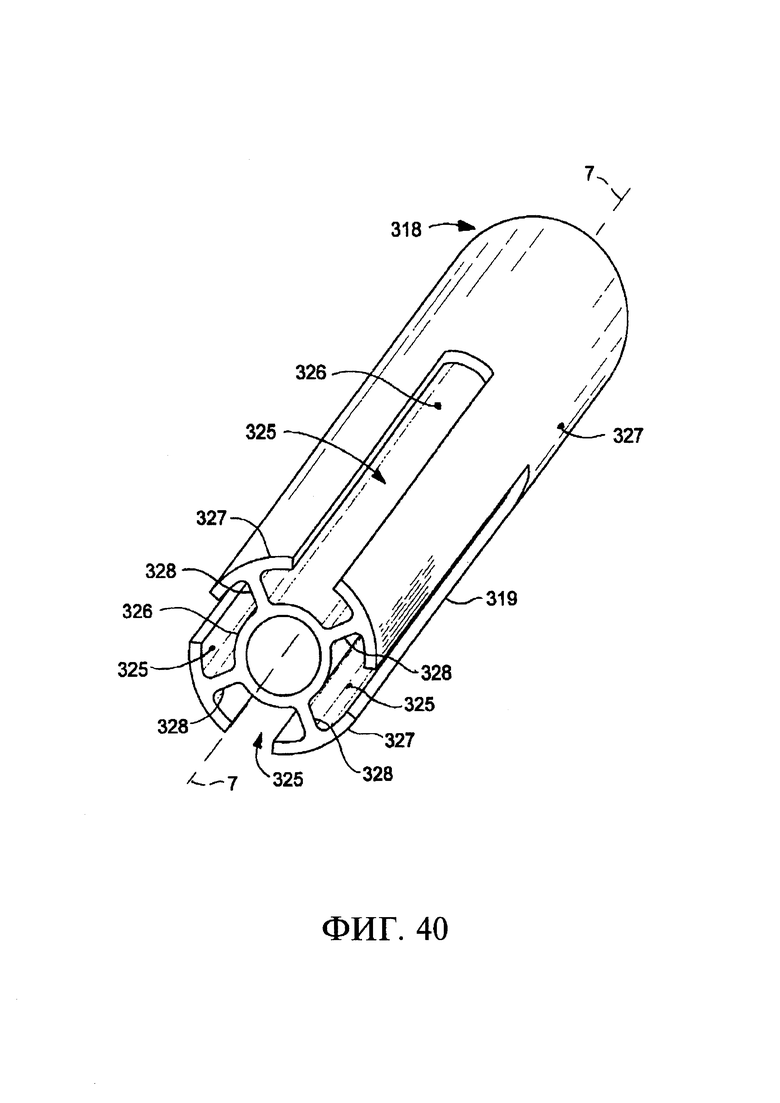
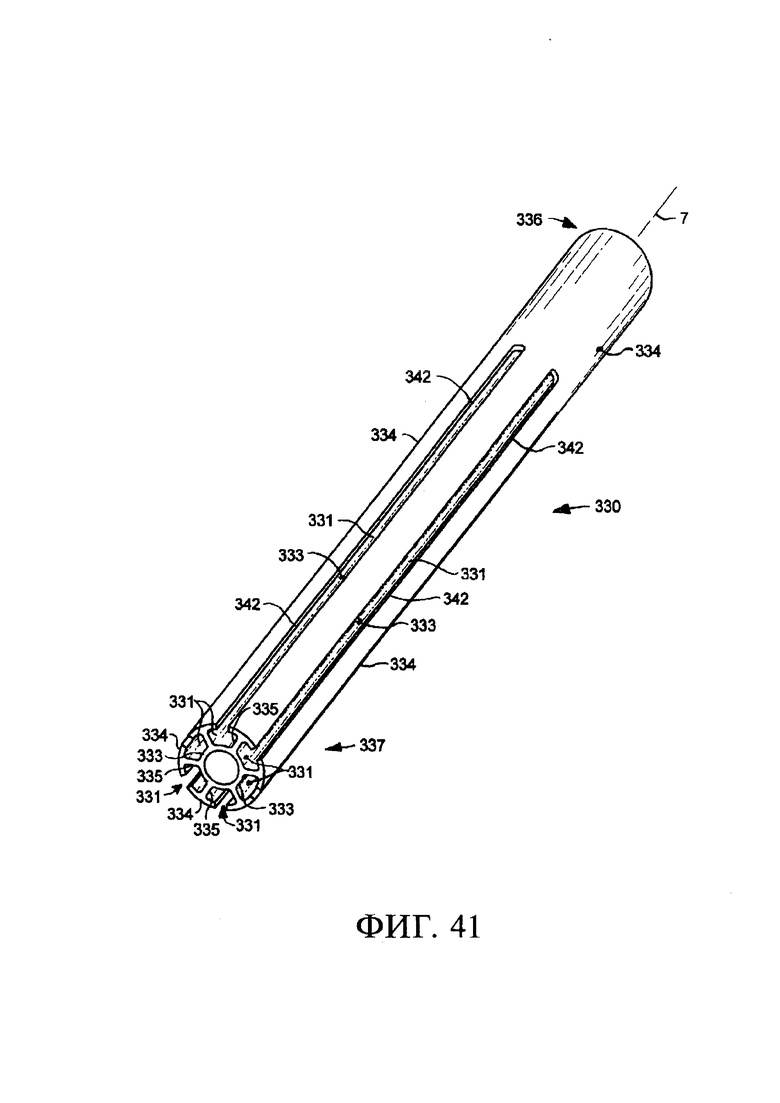
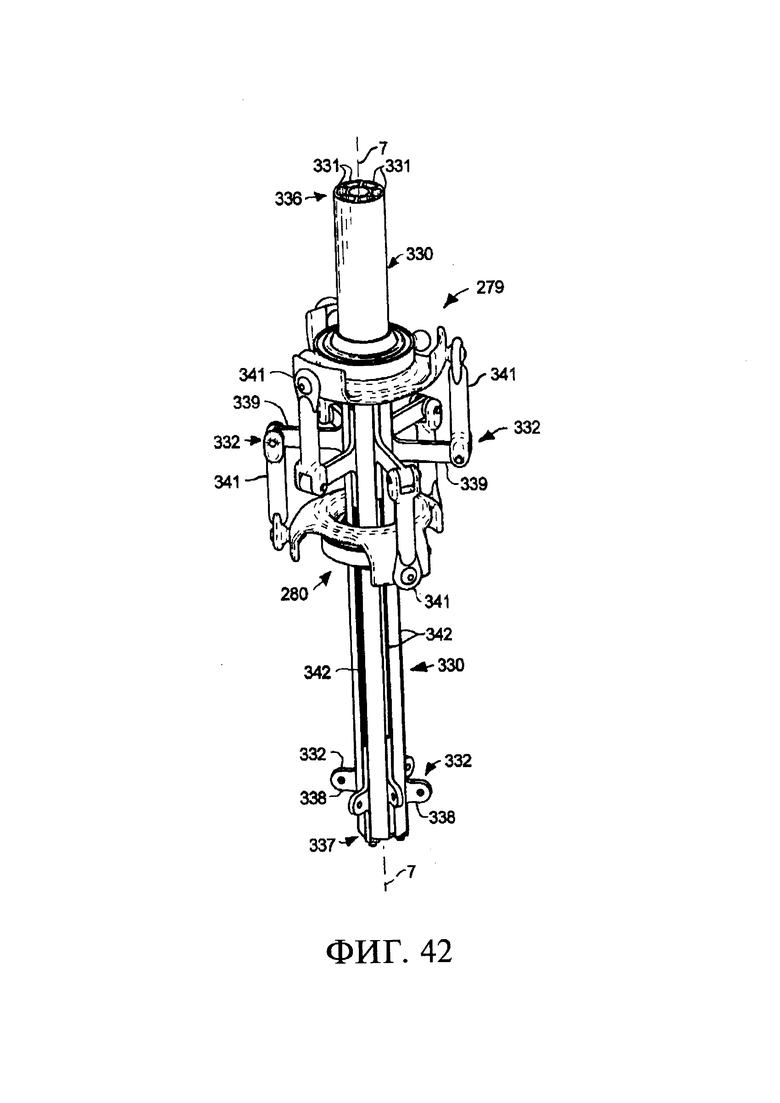
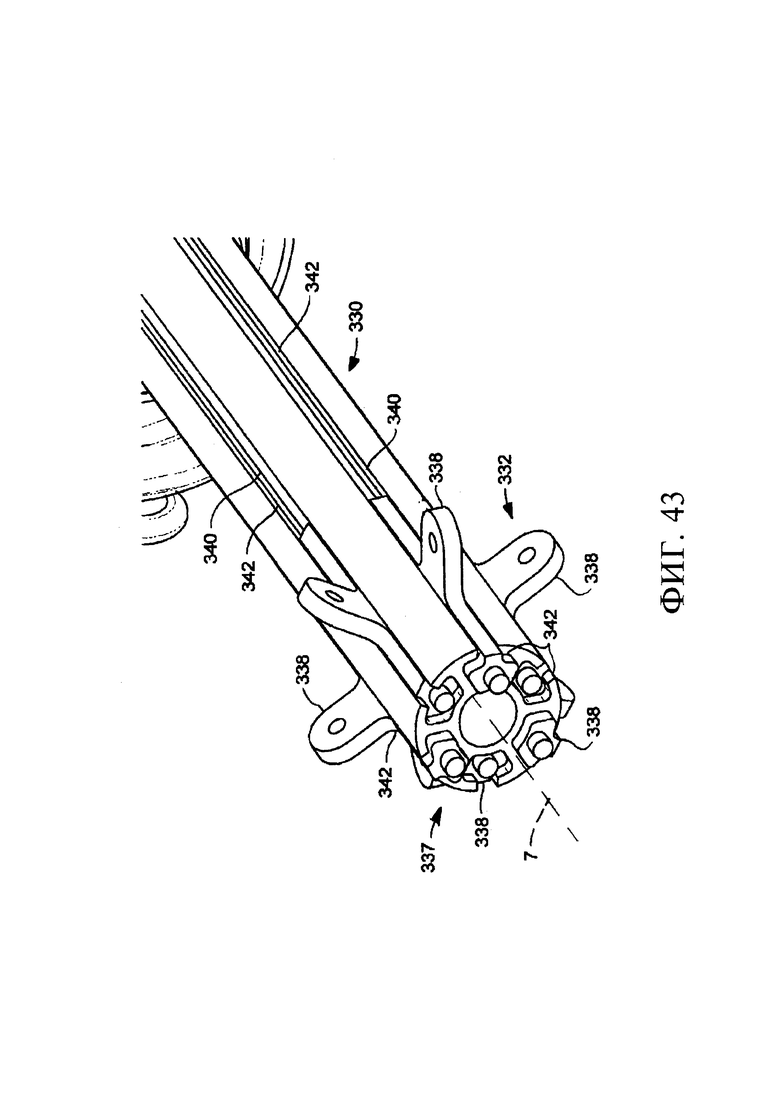
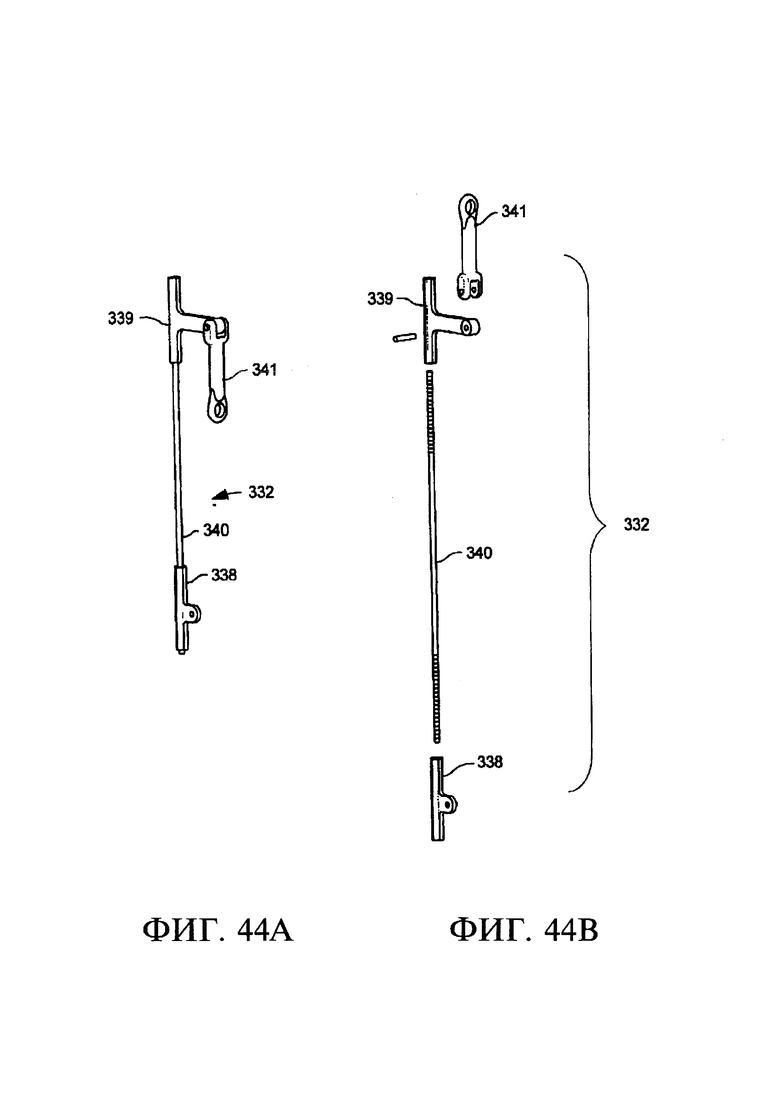
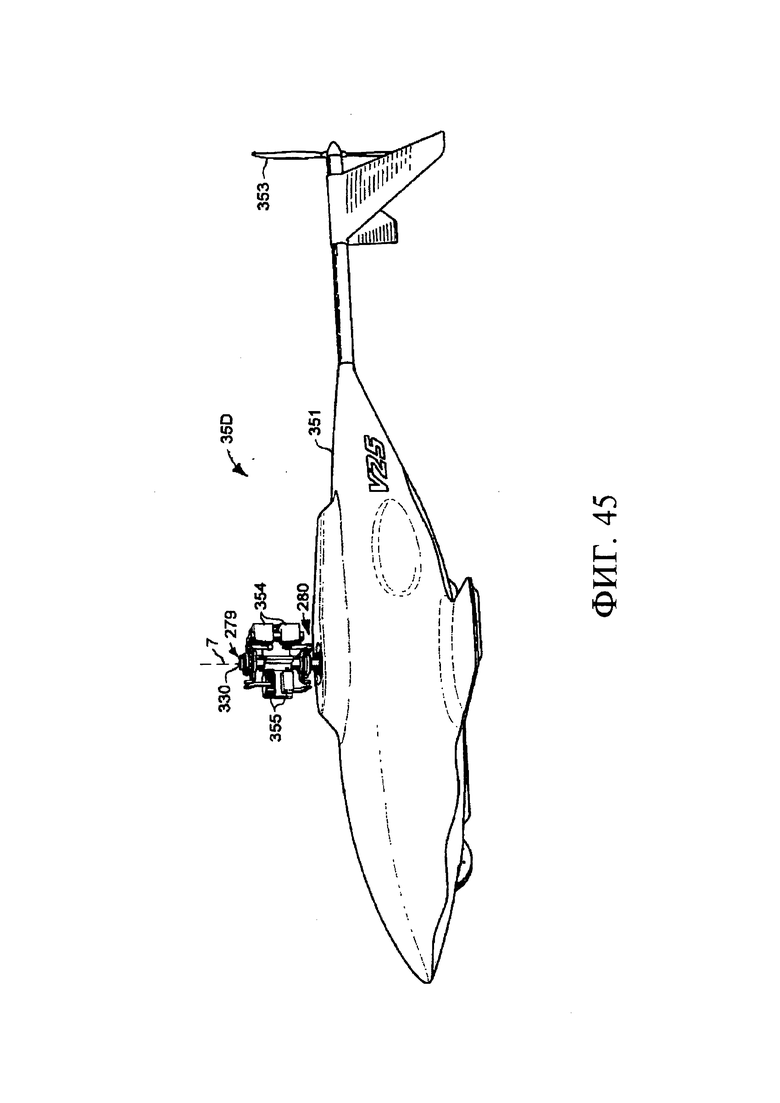
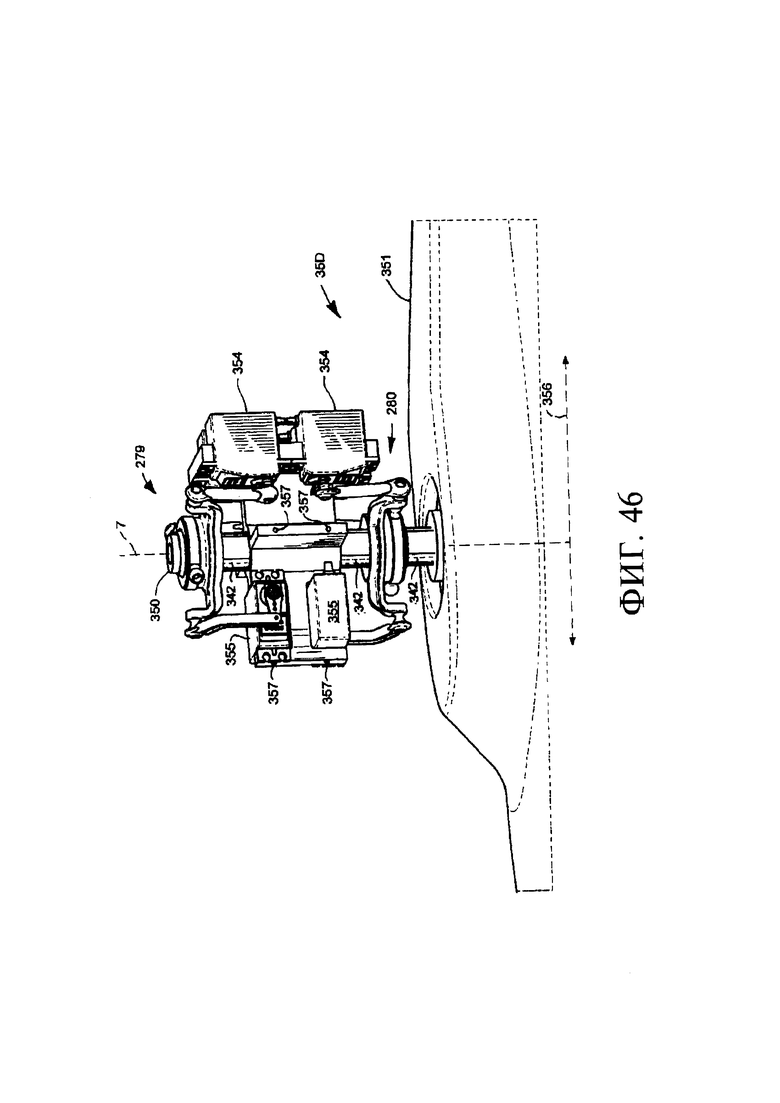
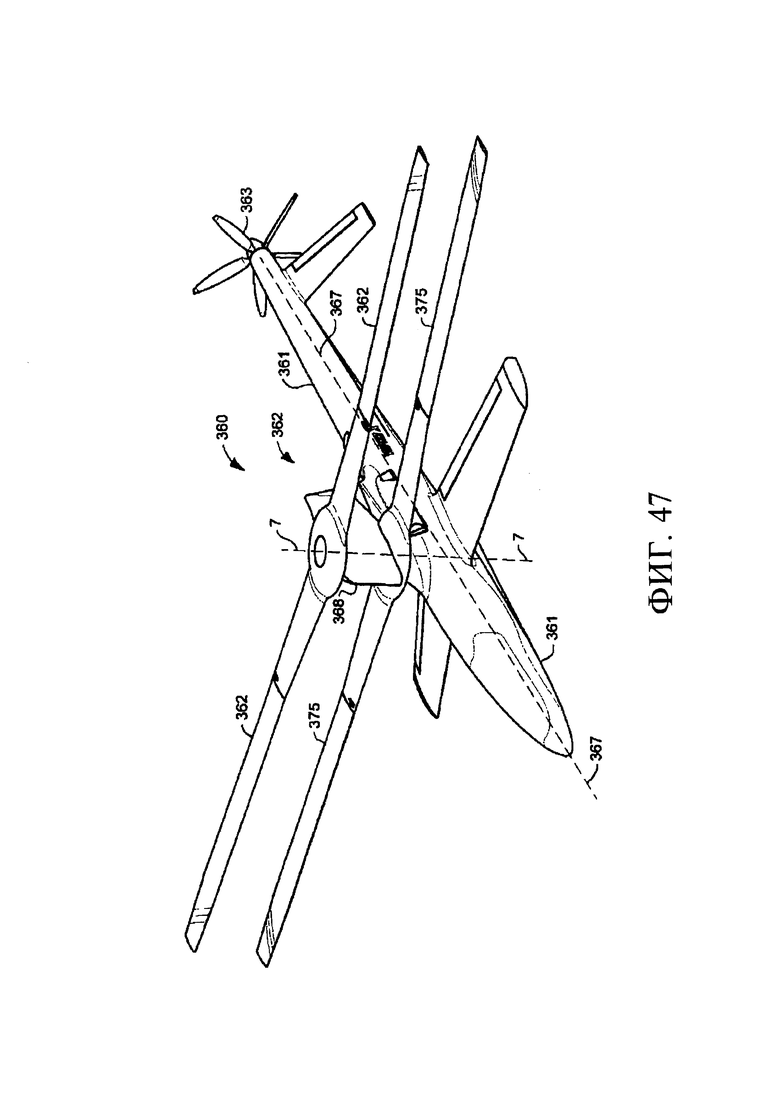
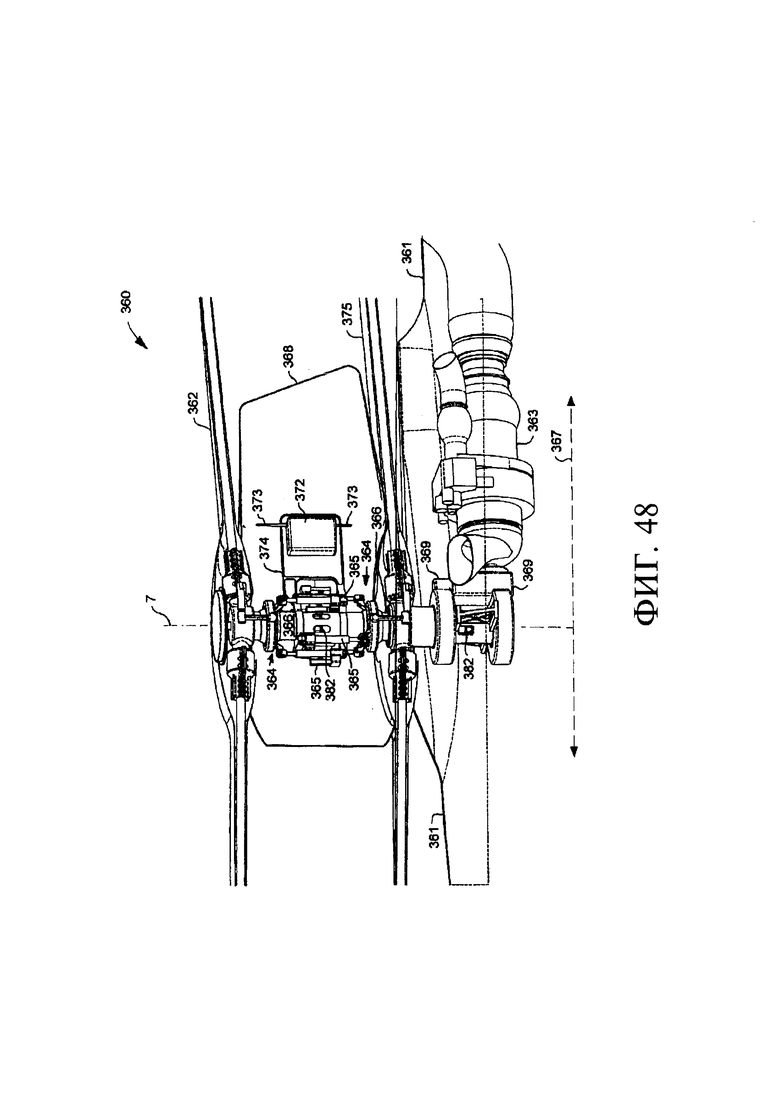
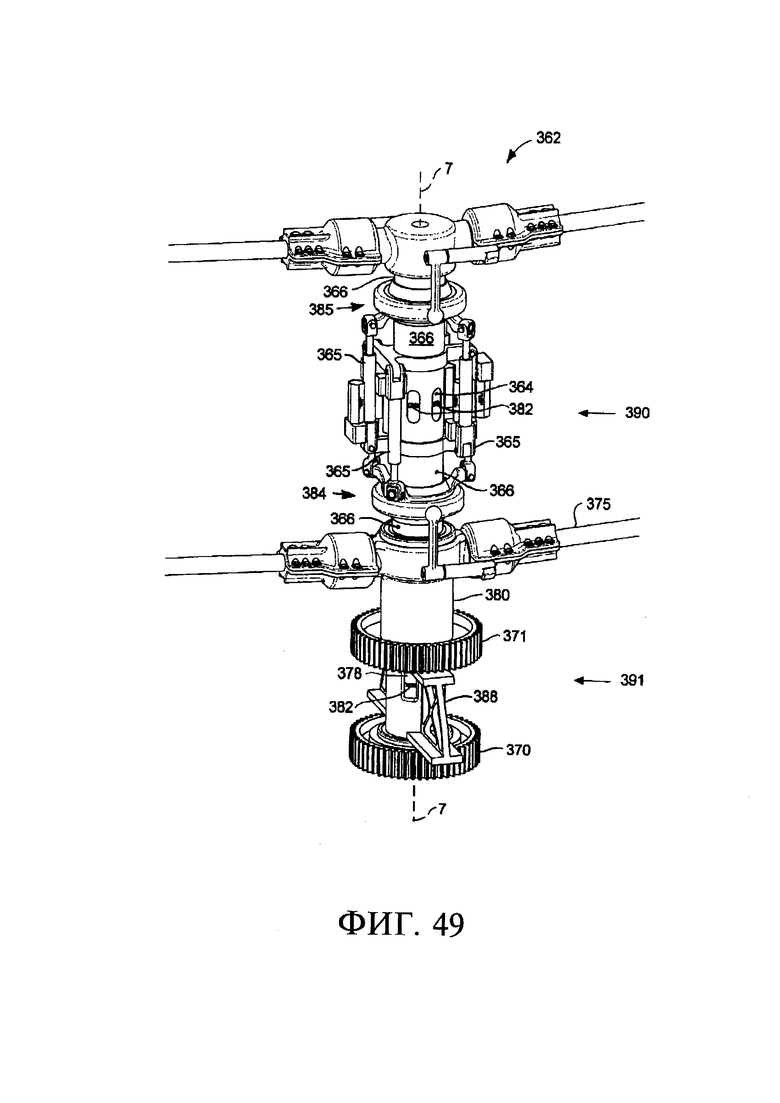
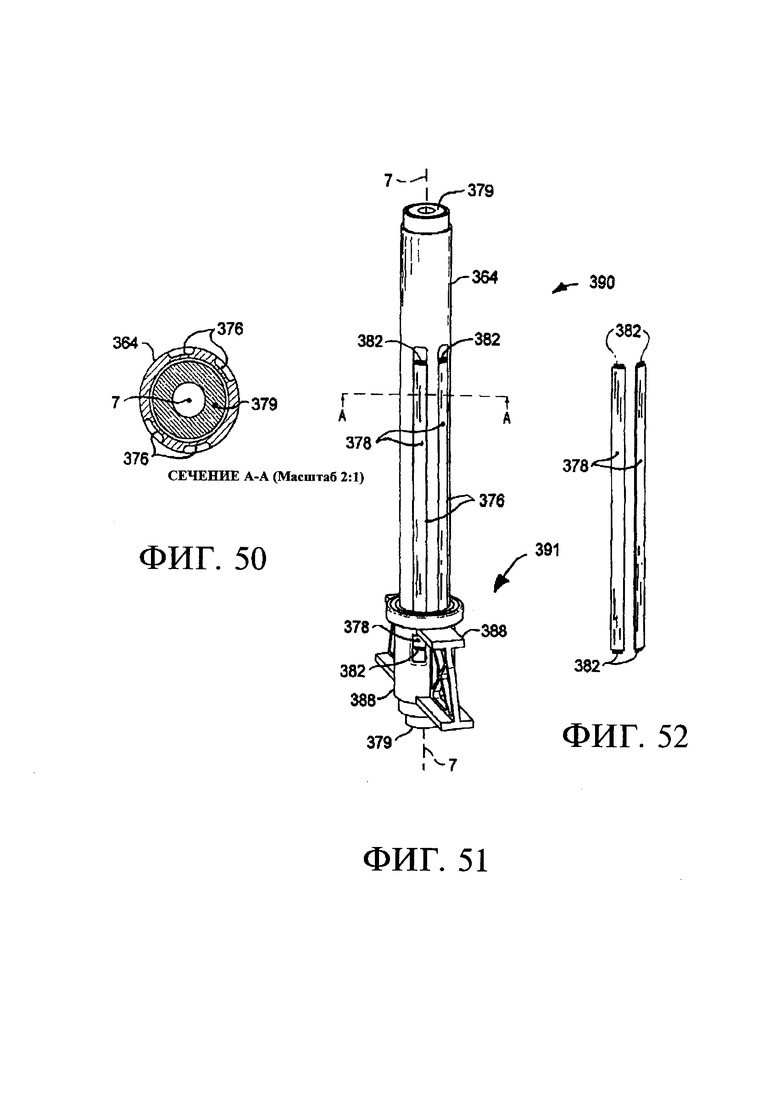
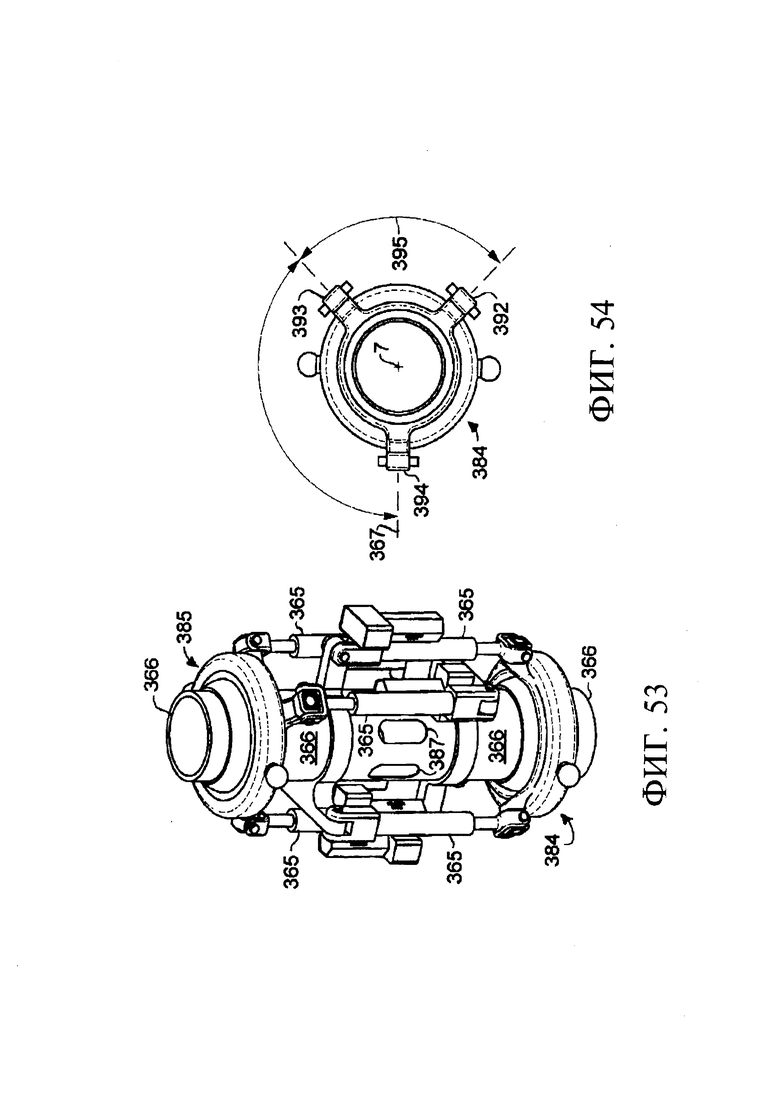
Винтокрылый летательный аппарат содержит корпус, содержащий продолговатый трубчатый остов или каркасную трубу, и систему соосных несущих винтов противоположного направления вращения. Каждый несущий винт имеет отдельный двигатель для приведения во вращение винтов вокруг общей оси вращения несущих винтов. Система несущих винтов содержит первое и второе устройства управления шагом, расположенные между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, для управления шагом лопастей соответствующих несущих винтов изменяемого шага. Устройства управления шагом вращаются вокруг оси вращения несущих винтов, повернутые на такой угол один относительно другого, что первые звенья управления шагом и вторые звенья управления шагом размещены вокруг невращающегося остова, чередуясь друг с другом, и поочередно присоединены к первому устройству управления шагом и второму устройству управления шагом. Обеспечивается компактность конструкции и снижение аэродинамического сопротивления при полете на высокой скорости. 4 н. и 36 з.п. ф-лы, 54 ил.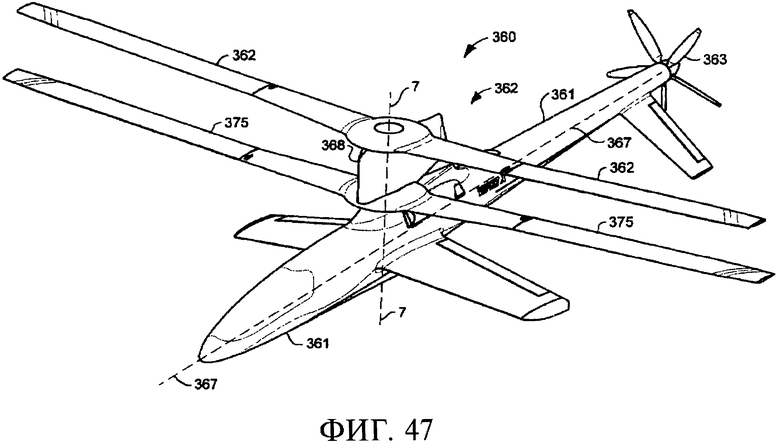
1. Винтокрылый летательный аппарат, содержащий
невращающийся остов, простирающийся параллельно оси вращения несущих винтов,
лопасти первого несущего винта изменяемого шага, установленные на опору с возможностью вращения вокруг упомянутой оси вращения несущих винтов в плоскости вращения первого несущего винта,
лопасти второго несущего винта изменяемого шага, установленные на опору с возможностью вращения вокруг упомянутой оси вращения несущих винтов в плоскости вращения второго несущего винта,
первое устройство управления шагом, расположенное между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, для управления шагом упомянутых лопастей первого несущего винта изменяемого шага,
второе устройство управления шагом, расположенное между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, для управления шагом упомянутых лопастей второго несущего винта изменяемого шага,
множество первых звеньев управления шагом, соединенных с упомянутым первым устройством управления шагом так, что смещение упомянутых первых звеньев управления шагом приводит в действие упомянутое первое устройство управления шагом,
множество вторых звеньев управления шагом, соединенных с упомянутым вторым устройством управления шагом так, что смещение упомянутых вторых звеньев управления шагом приводит в действие упомянутое второе устройство управления шагом,
причем упомянутое первое устройство управления шагом и упомянутое второе устройство управления шагом вращаются вокруг упомянутой оси вращения несущих винтов, повернутые на такой угол один относительно другого, что упомянутые первые звенья управления шагом и упомянутые вторые звенья управления шагом размещены вокруг упомянутого невращающегося остова, чередуясь друг с другом, и поочередно присоединены к упомянутому первому устройству управления шагом и упомянутому второму устройству управления шагом, тем самым образуя компактную конструкцию.
2. Винтокрылый летательный аппарат по п. 1, дополнительно включающий в себя множество первых сервомеханизмов, соединенных с упомянутыми первыми звеньями управления шагом, и множество вторых сервомеханизмов, соединенных с упомянутыми вторыми звеньями управления шагом, и при этом упомянутые первые сервомеханизмы и упомянутые вторые сервомеханизмы размещены вокруг упомянутого невращающегося остова, чередуясь друг с другом, тем самым образуя компактную конструкцию.
3. Винтокрылый летательный аппарат по п. 1, дополнительно включающий в себя множество сервомеханизмов, поддерживаемых невращающимся остовом, для приведения в действие первого устройства управления шагом и второго устройства управления шагом, и продольно простирающуюся плоскость, которая определена упомянутой осью вращения несущих винтов и продольной осью, причем упомянутые сервомеханизмы расположены так, что находятся рядом с продольно простирающейся плоскостью для уменьшения площади лобовой поверхности упомянутых сервомеханизмов и снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
4. Винтокрылый летательный аппарат по любому из пп. 2 или 3, дополнительно включающий в себя кожух колонки, имеющий аэродинамическую форму, поддерживаемый невращающимся остовом и закрывающий один из множества сервомеханизмов, для снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
5. Винтокрылый летательный аппарат по п. 1, дополнительно включающий в себя сервомеханизмы, расположенные ниже упомянутых лопастей первого и второго несущего винта изменяемого шага у нижнего конца упомянутого невращающегося остова, и тягу (340), соединяющую упомянутые сервомеханизмы с упомянутыми звеньями (341) управления шагом, причем упомянутый невращающийся остов имеет внутренние проходы или каналы, выполненные так, чтобы вмещать упомянутые тяги, и упомянутые тяги, размещенные внутри упомянутых внутренних проходов или каналов, приводят в действие упомянутые звенья управления шагом и упомянутое первое устройство управления шагом или упомянутое второе устройство управления шагом.
6. Винтокрылый летательный аппарат по любому из пп. 1 и 5, дополнительно включающий в себя тело Z-образного звена, причем упомянутое тело Z-образного звена удерживает первый рычажный механизм управления шагом в фиксированном положении относительно второго рычажного механизма управления шагом для образования Z-образного звена и смещение упомянутого Z-образного звена параллельно оси вращения одновременно приводит в действие первое устройство управления шагом и второе устройство управления шагом.
7. Винтокрылый летательный аппарат по п. 6, отличающийся тем, что смещение упомянутого Z-образного звена параллельно оси вращения смещает упомянутое первое устройство управления шагом и упомянутое второе устройство управления шагом в различных фазовых направлениях, отделенных дифференциальным фазовым углом, составляющим от 60 градусов до 120 градусов, чтобы обеспечить работу упомянутых лопастей первого несущего винта изменяемого шага в фазе с упомянутыми лопастями второго несущего винта изменяемого шага и создание значительных управляющих усилий.
8. Винтокрылый летательный аппарат по п. 1, дополнительно включающий в себя сервомеханизмы, причем упомянутые сервомеханизмы представляют собой линейные сервомеханизмы (365) винтового типа, каждый из которых имеет первый конец, присоединенный к упомянутому невращающемуся остову, или колонке, и второй конец, присоединенный к по меньшей мере одному из упомянутых первого и второго устройств управления шагом для приведения в действие по меньшей мере одного из упомянутых первого и второго устройств управления шагом.
9. Винтокрылый летательный аппарат по любому из пп. 1-3, дополнительно включающий в себя двигатель, расположенный ниже упомянутых лопастей второго несущего винта изменяемого шага, причем упомянутый двигатель соединен с упомянутыми лопастями первого несущего винта изменяемого шага трубчатым валом, проходящим внутри упомянутого невращающегося остова, и при этом упомянутый трубчатый вал передает энергию между упомянутым двигателем и упомянутыми лопастями первого несущего винта изменяемого шага.
10. Винтокрылый летательный аппарат по п. 3, отличающийся тем, что первое устройство управления шагом представляет собой первый автомат перекоса и второе устройство управления шагом представляет собой второй автомат перекоса, причем каждый из упомянутых первого и второго автоматов перекоса включает в себя три рычага автомата перекоса, и два из трех рычагов автомата перекоса на каждом автомате перекоса расположены ближе друг к другу, чем к оставшемуся рычагу автомата перекоса, для уменьшения лобовой ширины упомянутых первого автомата перекоса и второго автомата перекоса и снижения аэродинамического лобового сопротивления при полете на высокой скорости.
11. Винтокрылый летательный аппарат по п. 10, отличающийся тем, что первый автомат перекоса и второй автомат перекоса повернуты на угол 180 градусов один относительно другого вокруг упомянутой оси вращения несущих винтов.
12. Винтокрылый летательный аппарат по п. 9, дополнительно включающий в себя обращенный назад винт, способный создавать горизонтальную тяговую силу для толкания упомянутого винтокрылого летательного аппарата в горизонтальном направлении.
13. Винтокрылый летательный аппарат по п. 9, дополнительно включающий в себя кожух колонки, имеющий аэродинамическую форму, который присоединен к упомянутому невращающемуся остову и выполнен так, что окружает упомянутый невращающийся остов между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, и при этом он выполнен обеспечивающим снижение лобового сопротивления упомянутого винтокрылого летательного аппарата при полете на высокой скорости.
14. Винтокрылый летательный аппарат по п. 1, дополнительно включающий в себя первый электронный или гидравлический элемент, расположенный выше плоскости вращения второго несущего винта, и второй электронный или гидравлический элемент, расположенный ниже плоскости вращения второго несущего винта, и либо электрическую шину, либо гидравлические гибкие трубопроводы для передачи электрической или гидравлической энергии и сигналов между упомянутым первым электронным или гидравлическим элементом и упомянутым вторым электронным или гидравлическим элементом,
причем упомянутый невращающийся остов включает в себя простирающийся в осевом направлении канал для размещения компонентов передачи энергии и сигналов, и при этом электрическая шина или гидравлические гибкие трубопроводы расположены внутри упомянутого простирающегося в осевом направлении канала.
15. Винтокрылый летательный аппарат по любому из пп. 4 и 13, дополнительно включающий в себя составные части летательного аппарата, расположенные внутри упомянутого кожуха колонки и поддерживаемые невращающимся остовом, при этом упомянутые составные части летательного аппарата включают в себя части, выбранные из электронных компонентов, гидравлических компонентов, двигателей, клапанов и антенн.
16. Винтокрылый летательный аппарат, содержащий
невращающийся остов, выполненный включающим в себя центральную стойку и внешний кожух, между которыми образован внутренний канал для размещения компонентов передачи энергии и сигналов,
лопасть первого несущего винта изменяемого шага, присоединенную к упомянутому невращающемуся остову и установленную на опору с возможностью вращения вокруг оси вращения несущего винта в плоскости вращения первого несущего винта, и первое устройство управления шагом, присоединенное к упомянутому невращающемуся остову, для управления циклическим шагом лопасти первого несущего винта,
лопасть второго несущего винта изменяемого шага, присоединенную к упомянутому невращающемуся остову и установленную на опору с возможностью вращения вокруг упомянутой оси вращения несущего винта в плоскости вращения второго несущего винта, и второе устройство управления шагом, присоединенное к упомянутому невращающемуся остову, для управления циклическим шагом лопасти второго несущего винта,
энергетический модуль, расположенный ниже плоскости вращения второго несущего винта и выполненный с возможностью предоставления энергии для приведения во вращение упомянутой лопасти первого несущего винта изменяемого шага вокруг упомянутой оси вращения несущего винта, и
трубчатый вал, простирающийся через внутреннее пространство центральной стойки упомянутого невращающегося остова и выполненный с возможностью передачи вращательного движения от упомянутого энергетического модуля к упомянутой лопасти первого несущего винта изменяемого шага для приведения во вращение упомянутой лопасти первого несущего винта изменяемого шага вокруг упомянутой оси вращения несущего винта.
17. Винтокрылый летательный аппарат по п. 16, дополнительно включающий в себя трансмиссию (271), которая расположена рядом с верхним концом упомянутого невращающегося остова и выполнена так, чтобы соединять упомянутую лопасть первого несущего винта изменяемого шага и упомянутый трубчатый вал.
18. Винтокрылый летательный аппарат по п. 17, отличающийся тем, что упомянутая трансмиссия представляет собой также систему понижения скорости, так что упомянутый трубчатый вал может быть выполнен так, чтобы работать при высокой частоте вращения с низким крутящим моментом.
19. Винтокрылый летательный аппарат по п. 16, дополнительно включающий в себя
продольную ось, направленную перпендикулярно вертикальной оси вращения несущего винта и вдоль направления перемещения упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости,
продольно простирающуюся плоскость, которая определена упомянутой вертикальной осью вращения несущего винта и упомянутой продольной осью,
множество первых сервомеханизмов, расположенных между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, причем упомянутое множество первых сервомеханизмов поддерживаются упомянутым невращающимся остовом и соединены с упомянутыми первым и вторым устройствами управления шагом для приведения в действие упомянутых первого и второго устройств управления шагом.
20. Винтокрылый летательный аппарат по п. 19, отличающийся тем, что упомянутое множество первых сервомеханизмов выполнены расположенными рядом с упомянутой продольно простирающейся плоскостью для уменьшения лобовой ширины и площади поверхности упомянутых первых сервомеханизмов и снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
21. Винтокрылый летательный аппарат по п. 19, дополнительно включающий в себя второе устройство управления шагом, присоединенное к упомянутому невращающемуся остову для управления шагом лопасти второго несущего винта, и
множество вторых сервомеханизмов, расположенных между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, причем упомянутое множество вторых сервомеханизмов поддерживаются упомянутым невращающимся остовом и соединены с упомянутым вторым устройством управления шагом для приведения в действие упомянутого второго устройства управления шагом.
22. Винтокрылый летательный аппарат по п. 21, отличающийся тем, что упомянутые множества первых и вторых сервомеханизмов выполнены расположенными рядом с упомянутой продольно простирающейся плоскостью для уменьшения площади лобовой поверхности упомянутых первых и вторых сервомеханизмов и снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
23. Винтокрылый летательный аппарат по п. 21, отличающийся тем, что один из упомянутых первых сервомеханизмов и один из упомянутых вторых сервомеханизмов расположены перед упомянутым невращающимся остовом, тогда как два из упомянутых первых сервомеханизмов и два из упомянутых вторых сервомеханизмов расположены за упомянутым невращающимся остовом.
24. Винтокрылый летательный аппарат по любому из пп. 16 и 21, дополнительно включающий в себя первый электронный или гидравлический элемент, расположенный выше плоскости вращения второго несущего винта, и второй электронный или гидравлический элемент, расположенный ниже плоскости вращения второго несущего винта, и либо электрическую шину, либо гидравлические гибкие трубопроводы для передачи электрической или гидравлической энергии и сигналов между упомянутым первым электронным или гидравлическим элементом и упомянутым вторым электронным или гидравлическим элементом,
причем либо упомянутая электрическая шина, либо упомянутые гидравлические гибкие трубопроводы расположены внутри упомянутого простирающегося в осевом направлении канала.
25. Винтокрылый летательный аппарат по п. 19, дополнительно включающий в себя кожух колонки, имеющий аэродинамическую форму, который присоединен к упомянутому невращающемуся остову и окружает один из упомянутого множества первых сервомеханизмов, и при этом упомянутый кожух колонки выполнен обеспечивающим снижение до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
26. Винтокрылый летательный аппарат по п. 25, дополнительно включающий в себя составные части летательного аппарата, расположенные внутри упомянутого кожуха колонки и поддерживаемые невращающимся остовом, при этом упомянутые составные части летательного аппарата включают в себя части, выбранные из электронных компонентов, гидравлических компонентов, двигателей, клапанов и антенн.
27. Винтокрылый летательный аппарат, содержащий
невращающийся остов, простирающийся в осевом направлении вдоль вертикальной оси вращения несущих винтов,
продольную ось, лежащую перпендикулярно по отношению к вертикальной оси вращения несущих винтов и определяющую направление перемещения упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости,
продольно простирающуюся плоскость, которая определена упомянутой вертикальной осью вращения несущих винтов и упомянутой продольной осью,
лопасть первого несущего винта изменяемого шага, присоединенную к упомянутому невращающемуся остову и установленную на опору с возможностью вращения вокруг оси вращения несущего винта в плоскости вращения первого несущего винта,
лопасть второго несущего винта изменяемого шага, присоединенную к упомянутому невращающемуся остову и установленную на опору с возможностью вращения вокруг упомянутой оси вращения несущего винта в плоскости вращения второго несущего винта,
первое устройство управления шагом, присоединенное к упомянутому невращающемуся остову, для управления шагом лопасти первого несущего винта, и
множество первых сервомеханизмов, расположенных между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, причем упомянутое множество первых сервомеханизмов поддерживаются упомянутым невращающимся остовом и соединены с упомянутым первым устройством управления шагом для приведения в действие упомянутого первого устройства управления шагом,
причем упомянутое множество первых сервомеханизмов выполнены расположенными рядом с упомянутой продольно простирающейся плоскостью для уменьшения площади лобовой поверхности упомянутых первых сервомеханизмов и снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
28. Винтокрылый летательный аппарат по п. 27, отличающийся тем, что упомянутые сервомеханизмы выполнены расположенными перед или за упомянутым невращающимся остовом для уменьшения ширины лобовой поверхности и площади лобовой поверхности упомянутых сервомеханизмов при полете вперед на высокой скорости.
29. Винтокрылый летательный аппарат по п. 27, дополнительно включающий в себя кожух колонки, имеющий аэродинамическую форму, который присоединен к упомянутому невращающемуся остову и окружает упомянутое множество первых сервомеханизмов, и при этом упомянутый кожух колонки выполнен обеспечивающим снижение до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
30. Винтокрылый летательный аппарат по любому из пп. 27 и 29, дополнительно включающий в себя второе устройство управления шагом, присоединенное к упомянутому невращающемуся остову для управления шагом лопасти второго несущего винта, и
множество вторых сервомеханизмов, расположенных между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, причем упомянутое множество вторых сервомеханизмов поддерживаются упомянутым невращающимся остовом и соединены с упомянутым вторым устройством управления шагом для приведения в действие упомянутого второго устройства управления шагом,
причем упомянутое множество вторых сервомеханизмов выполнены расположенными рядом с упомянутой продольно простирающейся плоскостью для уменьшения площади лобовой поверхности упомянутых вторых сервомеханизмов и снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
31. Винтокрылый летательный аппарат по п. 30, отличающийся тем, что один из упомянутых первых сервомеханизмов и один из упомянутых вторых сервомеханизмов расположены перед упомянутым невращающимся остовом, а два из упомянутых первых сервомеханизмов и два из упомянутых вторых сервомеханизмов расположены за упомянутым невращающимся остовом.
32. Винтокрылый летательный аппарат по п. 29, дополнительно включающий в себя составную часть летательного аппарата, расположенную внутри упомянутого кожуха колонки и поддерживаемую невращающимся остовом, при этом упомянутая составная часть летательного аппарата выбрана из электронных компонентов, гидравлических компонентов, двигателей, клапанов и антенн.
33. Винтокрылый летательный аппарат, содержащий
лопасть первого несущего винта изменяемого шага, установленную на опору с возможностью вращения вокруг оси вращения несущего винта в плоскости вращения первого несущего винта,
лопасть второго несущего винта изменяемого шага, установленную на опору с возможностью вращения вокруг упомянутой оси вращения несущего винта в плоскости вращения второго несущего винта,
первое устройство управления шагом лопасти, расположенное между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, выполненное с возможностью управления шагом упомянутой лопасти первого несущего винта,
второе устройство управления шагом лопасти, расположенное между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта, выполненное с возможностью управления шагом упомянутой лопасти второго несущего винта, и
первый рычажный механизм управления шагом, имеющий первый конец, соединенный с упомянутым первым устройством управления шагом лопасти, и второй конец, соединенный с упомянутым вторым устройством управления шагом лопасти так, что смещение упомянутого первого рычажного механизма управления шагом одновременно приводит в действие и упомянутое первое устройство управления шагом лопасти, и упомянутое второе устройство управления шагом лопасти,
причем смещение упомянутого первого рычажного механизма управления шагом вызывает изменение упомянутым первым устройством управления шагом лопасти циклического шага лопасти первого несущего винта при некотором циклическом фазовом угле первого несущего винта и вызывает изменение упомянутым вторым устройством управления шагом лопасти циклического шага лопасти второго несущего винта при некотором циклическом фазовом угле второго несущего винта, причем упомянутый циклический фазовый угол первого несущего винта отличается от упомянутого циклического фазового угла второго несущего винта.
34. Винтокрылый летательный аппарат по п. 33, отличающийся тем, что упомянутый первый рычажный механизм управления шагом действует как рычажный механизм, препятствующий вращению, и предотвращает вращение одного из упомянутых первого и второго устройств управления шагом лопасти вокруг упомянутой оси вращения несущего винта.
35. Винтокрылый летательный аппарат по п. 33 или 34, дополнительно включающий в себя
невращающийся остов, простирающийся в осевом направлении вдоль вертикальной оси вращения несущих винтов, и
первый сервомеханизм, расположенный между плоскостью вращения первого несущего винта и плоскостью вращения второго несущего винта,
причем упомянутый первый сервомеханизм поддерживается невращающимся остовом и соединен с упомянутым первым рычажным механизмом управления шагом для приведения в действие упомянутого первого рычажного механизма управления шагом.
36. Винтокрылый летательный аппарат по п. 33, дополнительно включающий в себя первый сервомеханизм, расположенный ниже плоскости вращения второго несущего винта и соединенный с упомянутым первым рычажным механизмом управления шагом для приведения в действие упомянутого первого рычажного механизма управления шагом.
37. Винтокрылый летательный аппарат по п. 33, отличающийся тем, что упомянутый первый рычажный механизм управления шагом представляет собой Z-образное звено, при этом его упомянутые первый конец и второй конец совместно обеспечивают удержание упомянутого первого устройства управления шагом лопасти и второго устройства управления шагом лопасти расположенными с фиксированным фазовым углом относительно друг друга.
38. Винтокрылый летательный аппарат по п. 37, дополнительно включающий в себя множество Z-образных звеньев, соединенных с упомянутыми первым и вторым устройствами управления шагом, и множество сервомеханизмов, соединенных с упомянутым множеством Z-образных звеньев, и при этом упомянутые множество сервомеханизмов и Z-образные звенья взаимодействуют для приведения в действие упомянутых первого и второго устройств управления шагом.
39. Винтокрылый летательный аппарат по п. 33, отличающийся тем, что упомянутый фиксированный фазовый угол между первым устройством управления шагом лопасти и упомянутым вторым устройством управления шагом лопасти составляет от 60 градусов до 120 градусов.
40. Винтокрылый летательный аппарат по п. 33, дополнительно включающий в себя кожух колонки, имеющий аэродинамическую форму и закрывающий упомянутые первое и второе устройство управления шагом лопасти, для снижения до минимума аэродинамического лобового сопротивления упомянутого винтокрылого летательного аппарата при полете вперед на высокой скорости.
| US 2012025012 A1, 02.02.2012 | |||
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |
| EP 0757647 A1, 12.02.1997 | |||
| US 3118504 A, 21.01.1964. | |||

