Настоящее изобретение относится к направляющему устройству для поддерживания подводного трубопровода.
Более конкретно, настоящее изобретение относится к направляющему устройству для поддерживания подводного трубопровода вдоль направления подачи трубопровода по мере того, как он укладывается.
В следующем описании термин «подводный трубопровод» означает трубопровод, уложенный на морское дно. Хотя иногда в описании делается конкретная ссылка на укладывание подводных трубопроводов в море, понятно, что задача настоящего изобретения применяется к любому водному пространству, достаточно большому и глубокому, чтобы использовать укладочные суда, и ни в коей мере не ограничено применениями на море.
Известное направляющее устройство, такое как устройство, описанное в документе US 4030311, смонтировано к укладочной рампе и содержит салазки, вмещающие трубопровод; раму, прикрепленную к укладочной рампе; и распорный механизм, расположенный между первой рамой и салазками, чтобы осуществлять выборочную регулировку расстояние между салазками и рамой.
В документе US 4030311, распорный механизм содержит гидравлический цилиндр двустороннего действия; и рычаг, шарнирно соединенный с рамой и прикрепленный к гидравлическому цилиндру.
Салазки шарнирно соединены с рычагом двойным шарниром, чтобы поворачиваться свободно вокруг оси поперек направления подачи, и вокруг дополнительной оси, перпендикулярной упомянутой оси и направлению подачи.
Направляющее устройство в US 4030311 имеет преимущество в позволении быстрой регулировки расстояния между рамой и салазками, и в позволении салазкам автоматически устанавливаться в положение трубопровода на салазках.
С другой стороны, направляющее устройство в US 4030311 не предотвращает трубопровод от передачи сильного напряжения направляющему устройству и возможно нарушения его работы, и наоборот, не предотвращает направляющее устройство от передачи сильного напряжения и, таким образом, вызывания повреждения конструкции, трубопроводу по мере того, как он укладывается.
Более того, с точки зрения конструкции некоторые части направляющего устройства, подверженные и, следовательно, сконструированные, чтобы выдерживать особенно сильное напряжение, чрезвычайно громоздки и тяжелы, таким образом, приводя к чрезвычайно тяжелой укладочной рампе, которой трудно маневрировать.
Для более ясного понимания рассматриваемых проблем важно иметь в виду то, что направляющее устройство смонтировано к укладочной рампе, в свою очередь, установленную на укладочное судно.
Укладочное судно является плавучим основанием, содержащим линию сборки трубопровода или так называемую «монтажную линию» и снабженным на корме укладочной рампой, которая определяет протяженность монтажной линии и служит для травли трубопровода на морское дно по мере того, как плавучее основание продвигается.
Способ сооружения и укладывания трубопровода содержит сборку трубопровода по существу на горизонтальной монтажной линии; и укладывание трубопровода, используя укладочную рампу, которая, в рабочем расположении, направляет и поддерживает трубопровод вдоль дугообразного пути частично выше и частично ниже уровня моря. Используя этот способ, укладываемый трубопровод принимает форму «S» между судном и морским дном, с изгибами, чьи радиусы кривизны зависят от жесткости трубопровода, и различные типы судов могут применяться, такие как, понтоны, баржи, полупогружные и однокорпусные суда. Понтоны и баржи являются судами для укладки подводного трубопровода, чаще всего используемые раньше; полупогружные суда особенно подходят для укладки подводных трубопроводов в непогоду (умеренное волнение); и однокорпусные суда имеют преимущество в скорости, имеют достаточное пространство для хранения труб, и могут вмещать относительно длинные монтажные линии с большой производительностью.
Укладывание подводного трубопровода, однако, требует относительно хороших погодных условий настолько, что при условиях умеренного волнения укладывание прекращается: завершенная часть трубопровода оставляется на морском дне и прикрепляется к тросу лебедки для извлечения позже; и укладочная рампа устанавливается как можно выше уровня моря в так называемое «спасательное расположение».
Укладочная рампа обычно содержит внутреннюю рампу, шарнирно соединенную с судном, и наружную рампу, шарнирно соединенную с внутренней рампой, и может принимать различные рабочие расположения, в зависимости от глубины морского дна и характеристик трубопровода; расположение при транспортировке, в которой внутренняя и наружная рампы позволяют беспрепятственное перемещение судна; и упомянутое «спасательное расположение». Соответственно, укладочная рампа присоединена к судну приводным узлом, как описано, например, в патенте Заявителя US 4257718.
Чтобы направлять и подавать трубопровод вперед, укладочная рампа снабжается множеством направляющих устройств, выровненных, чтобы образовать направление подачи трубопровода.
В связи с вышесказанным, следует отметить, что судно и трубопровод подвержены давлению со стороны моря во время операции укладывания. С другой стороны, судно хотя удерживается на месте и медленно двигается по заданному курсу посредством системы якорных растяжек или посредством так называемой динамической стабилизации, используя движители, все еще подвержено нежелательным перемещениям, вызванным волнами и морскими течениями.
С другой стороны, трубопровод также подвержен тем же волнам и течениям. Но вследствие разницы в форме и весе судна и трубопровода и того факта, что трубопровод по существу гибок и частично опирается на морское дно, волна и морские течения создают дополнительное напряжение между укладочной рампой и трубопроводом.
Это напряжение может привести к большим нагрузкам, передаваемым между направляющими устройствами и трубопроводом, и может нарушить конструктивную целостность направляющих устройств, укладочной рампы как единого целого и трубопровода.
В патентной заявке WO 96/08 605 описано направляющее устройство вышеописанного типа, устраняющее этот недостаток и которое содержит двое салазок, шарнирно соединенных с промежуточной рамой, присоединенной в свою очередь к следующей промежуточной раме множеством пневматических амортизаторов.
Со временем это направляющее устройство показало особую эффективность в защите конструкции самого устройства. Однако известные направляющие устройства все же требуют значительного количества технического обслуживания вследствие износа, которому подвержены компоненты.
Задачей настоящего изобретения является обеспечение направляющего устройства для поддерживания подводного трубопровода по мере того, как он укладывается, и сконструированного, чтобы уменьшить недостатки известного уровня техники.
Другой задачей настоящего изобретения является обеспечение направляющего устройство для поддерживания подводного трубопровода по мере того, как он укладывается, и которое сконструировано, чтобы снизить давление на составные части направляющего устройства.
Согласно настоящему изобретению обеспечено направляющее устройство, для поддерживания подводного трубопровода вдоль направления подачи, по мере того, как он укладывается, причем направляющее устройство смонтировано к укладочной рампе и содержит салазки, вмещающие трубопровод; первую раму, прикрепленную к укладочной рампе; и распорный механизм, расположенный между первой рамой и салазками, для выборочного регулирования расстояния между салазками и первой рамой; причем направляющее устройство отличается тем, что распорный механизм содержит, по меньшей мере, один гаситель колебаний, присоединенный к салазкам; вторую раму, присоединенную к первой раме для осуществления вращения вокруг оси поперек направления подачи; и качающийся рычаг, соединенный поворотно со второй рамой; и первый привод, шарнирно соединенный с качающимся рычагом и второй рамой; причем гаситель колебаний шарнирно соединен с качающимся рычагом и салазками.
Главное преимущество настоящего изобретения заключается во всех компонентах направляющего устройства, за исключением салазок, защищенных от сильного напряжения и колебаний гасителем колебаний, присоединенным непосредственно к салазкам. Снижение количества колебаний, таким образом, обеспечивает защиту наиболее чувствительных компонентов.
Настоящее изобретение также относится к укладочной рампе.
Согласно настоящему изобретению обеспечена рампа для укладки подводного трубопровода; причем укладочная рампа шарнирно соединена с укладочным судном, чтобы принимать множество рабочих расположений, и содержит несущую конструкцию, вдоль которой выровнены направляющие устройства, каждый по любому из п.п.1-10; причем укладочная рампа отличается тем, что содержит множество стоек, расположенных парами противоположных стоек; и первую раму каждого направляющего устройства, присоединенную к противоположным стойкам в соответствующей паре.
Настоящее изобретение также относится к укладочному судну.
Согласно настоящему изобретению, обеспечено судно для укладки подводного трубопровода, причем укладочное судно содержит монтажную линию для сооружения подводных трубопроводов; рампа для укладки подводного трубопровода по любому из пп.11-14; и приводной узел укладочной рампы для установки укладочной рампы во множество рабочих расположений; причем укладочное судно отличается тем, что укладочное судно содержит устройство управления для управления расстоянием между каждыми салазками и соответствующей первой рамой в зависимости от матрицы оптимальных значений.
Настоящее изобретение также относится к способу управления укладочной рампой.
Согласно настоящему изобретению обеспечен способ управления укладочной рампой для подачи подводного трубопровода вдоль направления подачи, причем укладочная рампа шарнирно соединена с укладочным судном, чтобы принимать множество рабочих расположений, и содержит несущую конструкцию, вдоль которой выравниваются направляющие устройства, причем каждое содержит салазки, вмещающие трубопровод; первую раму, прикрепленную к укладочной рампе; и распорный механизм, расположенный между первой рамой и салазками; причем в способе осуществляют выборочное регулирование, для каждого направляющего устройства, расстояния между салазками и соответствующей первой рамой; и причем в способе осуществляют выборочное регулирование для каждого направляющего устройства, расстояния между салазками и соответствующей первой рамой в зависимости от матрицы оптимальных значений и регулировку жесткости гасителя колебаний, расположенного между салазками и соответствующей первой рамой.
Множество неограничивающих вариантов выполнения настоящего изобретения будут описаны в качестве примера со ссылкой на сопровождающие чертежи, на которых:
Фигура 1 изображает вид сбоку с местным разрезом, причем части удалены для ясности, укладочного судна, снабженного укладочной рампой для укладки подводного трубопровода в соответствии с настоящим изобретением;
Фигуры 2 и 3 изображают увеличенные виды в перспективе с местными разрезами, причем части удалены для ясности, направляющего устройства в соответствии с настоящим изобретением;
Фигура 4 изображает вид спереди, причем части удалены для ясности, направляющего устройства с Фигуры 2 и 3;
Фигура 5 изображает вид сверху, причем части удалены для ясности, направляющего устройства с Фигуры 2 и 3;
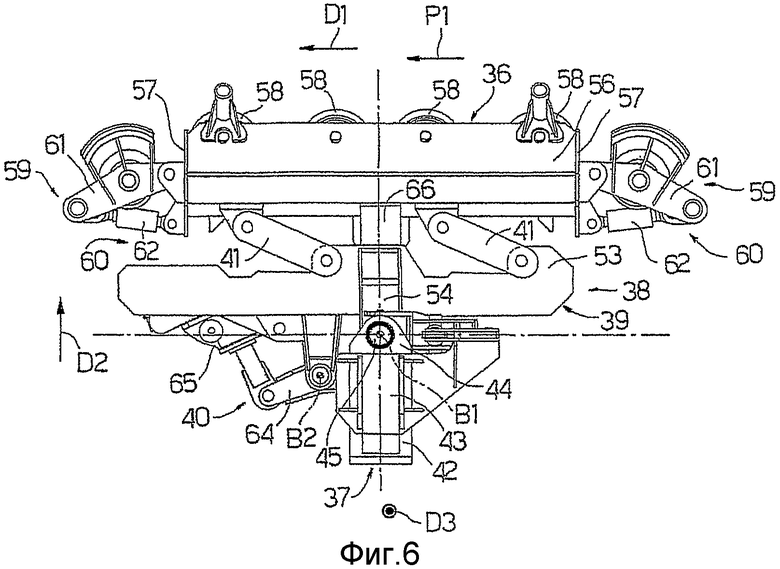
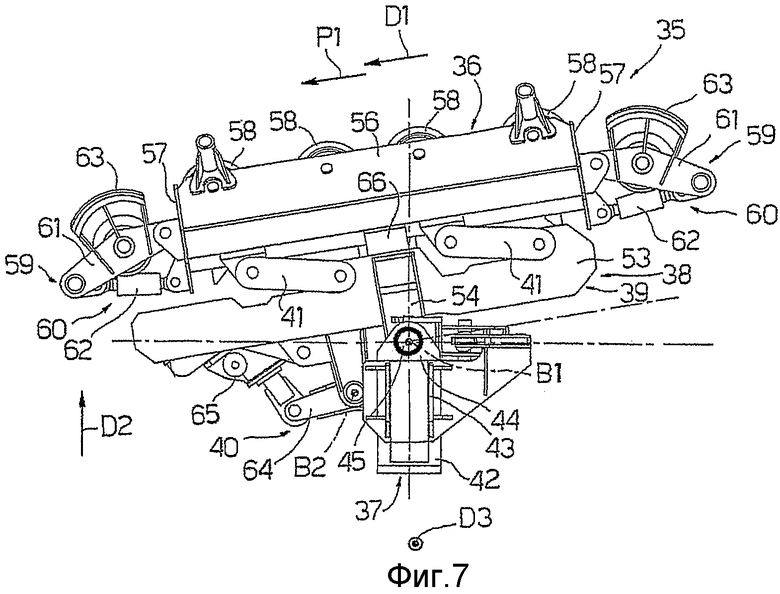
Фигуры 6 и 7 изображают виды сбоку, причем части удалены для ясности, направляющего устройства с Фигуры 2 в двух различных рабочих положениях;
Фигуры 8 и 9 изображают виды сбоку с местными разрезами, причем части удалены для ясности, направляющего устройства с Фигуры 2 в различных рабочих положениях;
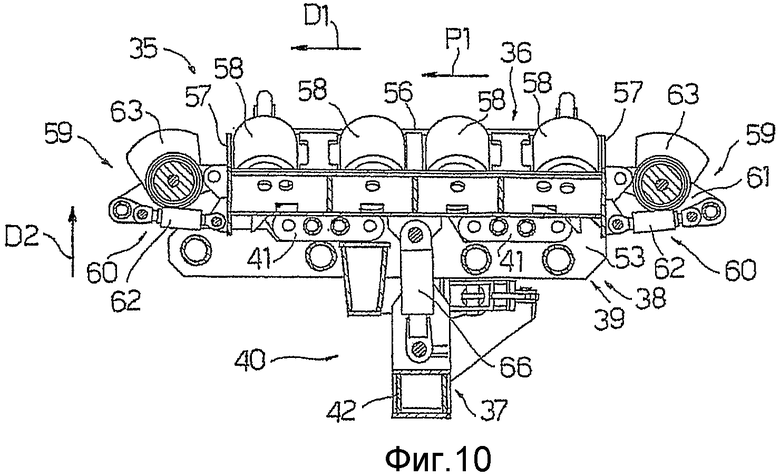
Фигура 10 изображает вид сбоку с местными разрезами, причем части удалены для ясности, варианта направляющего устройства с Фигуры 2.
Фигура 11 изображает схематичный вид, причем части удалены для ясности, устройства управления укладочного судна с Фигуры 1.
Ссылочная позиция 1 на Фигуре 1 обозначает укладочное судно для укладки подводного трубопровода 2 в относительно глубокой воде, уровень которой обозначен SL. В показанном примере, судно 1 является однокорпусным кораблем, имеющим корпус 3; ют 4; и монтажную линию 5 для сооружения трубопровода 2 соединением труб, не показанных на чертежах.
Укладочное судно 1 снабжено укладочной рампой 6, которая, в рабочем расположении с Фигуры 1, определяет протяженность монтажной линии 5.
Укладочная рампа 6 служит, чтобы укладывать и поддерживать трубопровод 2 вдоль направления Р1 подачи, имеющего, по меньшей мере, один изогнутый участок, первый участок над уровнем SL моря и второй участок ниже уровня SL моря.
Укладочное судно 1 снабжено краном 7, установленным, для выполнения вспомогательных операций, в области юта 4.
Ют 4 судна 1 имеет верхнюю палубу 8, образующую верх отсека 9, который ограничен сбоку двумя стенками 10 (только одна показана на Фигуре 1), частично утопленными на кормовой оконечности, и ограничен частично снизу нижней палубой 11, несущей монтажную линию 5.
Над верхней палубой 8 ют 4 содержит две боковые стенки 12 (только одна показана на Фигуре 1) и две противоположные, по существу вертикальные, стенки 13 (только одна показана на Фигуре 1) на кормовой оконечности.
Укладочная рампа 6 размещена, по меньшей мере, частично в отсеке 9, шарнирно соединена с судном 1 и, в показанном примере, содержит внутреннюю рампу 14, шарнирно соединенную с судном 1, и, в показанном примере, с нижней палубой 11; и наружную рампу 15, шарнирно соединенную, на Фигуре 1, с внутренней рампой 14. Судно 1 содержит приводной узел 16 для установки укладочной рампы 6 во множество рабочих расположений (только одна показана на Фигуре 1); расположение при транспортировке (не показано), в которой внутренняя рампа 14 и наружная рампа 15 обе располагаются выше уровня SL моря; и спасательное расположение (не показано на Фигуре 1), в котором внутренняя рампа 14 и наружная рампа 15 закреплены как можно выше уровня SL моря. Приводной узел 16 содержит исполнительный механизм 17, соединенный с внутренней рампой 14 и судном 1, и исполнительный механизм 18, соединенный с наружной рампой 15 и судном 1.
Исполнительные механизмы 17 и 18 служат для поддерживания, управления и установки внутренней рампы 14 и наружной рампы 15 соответственно в вышеуказанные расположения.
В рабочем расположении укладки с Фигуры 1, внутренняя рампа 14 и наружная рампа 15 образуют соответствующие опоры для трубопровода 2.
Исполнительный механизм 17 содержит две направляющие 19; две каретки 20 с механическим приводом (подъемная система), выполненные с возможностью перемещения вдоль направляющих 19; и две штанги 21, шарнирно соединенные с внутренней рампой 14 и соответствующими каретками 20 с механическим приводом. Фигура 1 изображает только одну направляющую 19, одну каретку 20 с механическим приводом и одну штангу 21.
Исполнительный механизм 18 содержит три пары направляющих 22, 23, 24; две тележки 25 с механическим приводом (подъемная система), выполненные с возможностью перемещения вдоль направляющих 22, 23, 24; и две штанги 21, шарнирно соединенные с наружной рампой 15 и соответствующими каретками 20 с механическим приводом. Направляющая 23 может выборочно поворачиваться в линию с направляющей 22 и направляющей 24, таким образом, направляющие 22, 23, 24 образуют очень длинный путь и намного более компактны, чем одна прямая направляющая длиной равной сумме длин направляющих 22, 23, 24.
Фигура 1 изображает только одну направляющую 22, одну направляющую 23, одну направляющую 24, одну тележку 2 5 с механически приводом и одну штангу 26.
Судно 1 медленно двигается вдоль заданного курса и перемещение судна 1 относительно трубопровода 2 травит трубопровод 2 с судна 1.
Более конкретно, и со ссылкой на Фигуру 1, внутренняя рампа 14 содержит несущую конструкцию, представляющую собой по существу жесткую рамную конструкцию 28 коробчатого сечения, которая имеет первый конец, шарнирно соединенный с нижней палубой 11 шарниром 29, причем ось А1 по существу параллельна уровню моря (в условиях спокойного моря); и второй конец, шарнирно соединенный с наружной рампой 15 шарниром 30, причем ось А2 параллельна оси А1. В примере с Фигуры 1, наружная рампа 15 содержит две по существу жесткие трубчатые рамные конструкции 31 и 32, которые жестко соединены друг с другом и выполнены с возможностью соединения с внутренней рампой 14 шарниром 30.
Помимо рабочих расположений, описанных выше, укладочная рампа 6 также принимает рабочие расположения, в которых наружная рампа 15 не имеет конструкции 32, которая по существу является продолжением конструкции 31. Укладочная рампа 6 также принимает рабочие расположения, в которых наружная рампа 15 отсоединена от внутренней рампы 14 и временно помещена в положение покоя, возможно на борту судна 1. В последних расположениях, трубопровод 2 укладывается посредством только внутренней рампы 14.
Внутренняя рампы 14 и наружная рампа 15 содержат множество пар стоек 33, которые, как показано на Фигурах 2 и 3, расположены напротив друг друга и имеют множество отверстий 34; и направляющие устройства 35 для поддерживания трубопровода 2. Направляющие устройства 35 выровнены друг с другом, чтобы образовать направление Р1 подачи и изгибание трубопровода 2 на укладочной рампе 6.
Направляющее устройство 35 служит для направления и поддерживания трубопровода 2 вдоль направления Р1 подачи по мере того, как трубопровод 2 укладывается, и, со ссылкой на Фигуры 2 и 3, содержит салазки 36, вмещающие трубопровод 2 (не показан на Фигурах 2 и 3); раму 37, прикрепленную к укладочной рампе 6 - в показанном примере, к стойкам 33; и распорный механизм 38, расположенный между рамой 37 и салазками 36, для осуществления выборочного регулирования расстояние между салазками 36 и рамой 37.
Салазки 36 продолжаются по существу в направлении D1 и в незначительной степени образуют часть направления Р1 подачи трубопровода 2.
Стойки 33 продолжаются в направлении D2, и рама 37, и распорный механизм 38, и салазки 36 расположены последовательно в направлении D2, которое перпендикулярно направлению D1.
Салазки 36 выполнены с возможностью перемещения относительно рамы 37 и укладочной рампы 6, вдоль оси В1 в направлении D3 поперек направления Р1 подачи и направлений D1 и D2, для того чтобы позволить боковое перемещение салазок 36 относительно рамы 37 и укладочной рампы 6.
Распорный механизм 38 содержит раму 39; и узел 40 силового привода (не показан на Фигуре 3). Рама 39 присоединена к раме 37, чтобы поворачиваться вокруг оси В1 и перемещаться вдоль оси В1, и присоединена к салазкам 36 соединительными штангами 41, которые, вместе с салазками 36 и рамой 39, образуют, в проекции, шарнирно-сочлененный четырехугольник, как более ясно изображено на Фигуре 8. В показанном примере, соединительных штанг 41 четыре штуки и они шарнирно соединены с рамой 39 и салазками 36 вокруг соответствующих осей, параллельных оси В1.
Рама 37 содержит поперечную балку 42; две скобы 43, прикрепленные к противоположным концам поперечной балки 42; четыре фланца 44, выровненных вдоль поперечной балки 42; два выровненных вала 45 оси В1; и два узла 4 6 силового привода, поддерживаемых соответствующими скобами 43.
Поперечная балка 42 имеет центральный участок, смещенный относительно двух боковых участков, в которых продолжаются валы 45.
Каждый вал 45 поддерживается соответствующей парой фланцев 44 и разнесен от другого вала 45.
Скобы 43 могут быть смонтированы к соответствующим стойкам 33 и, более конкретно, иметь отверстия 47, которые вместе с отверстиями 34 зацепляются болтами 48 или другими крепежами, так чтобы каждое направляющее устройство 35 было закреплено в заданном положении относительно стоек 33 и, в частности, относительно укладочной рампы 6 в направлении D2. Это установка в положение направляющего устройства 35 является грубой, предварительной установкой, выполняемой, до непосредственной укладки, исходя из предпочтительного рабочего расположения укладочной рампы 6, которое необходимо принять для укладки.
Предварительное положение направляющих устройств 35 относительно стоек 33 выбирается вычислением наилучшего изгиба трубопровода 2 вдоль укладочной рампы 6 для заданного расположения укладочной рампы б.
Со ссылкой на Фигуру 5 каждый узел 46 силового привода содержит фланец 49, выполненный за одно со скобой 43; втулку 50 смонтированную, чтобы перемещаться относительно соответствующего вала 45 вдоль оси В1; рычаг 51, шарнирно соединенный с фланцем 49 и втулкой 50; и привод 52, в частности, гидравлический цилиндр двустороннего действия, шарнирно соединенный с фланцем 49 и рычагом 51. Каждый узел 4 6 силового привода служит для толкания салазок 36 параллельно оси В1 относительно рамы 37 и укладочной рампы 6, как подробно описано ниже.
Со ссылкой на Фигуру 2 рама 39 содержит жесткую прямоугольную структуру 53; два кронштейна 54, выполненные за одно с прямоугольной структурой 53, как показано более ясно на Фигуре 4; две втулки 55, каждая выполненная за одно с концом кронштейна 54 и присоединенная к соответствующему валу 45, чтобы перемещаться вдоль оси В1 и вращаться вокруг оси В1.
Со ссылкой на Фигуры 2 и 3 салазки 3 6 содержат V-образную структуру 5 6, образованную между двумя концевыми пластинами 57; два комплекта роликов 58, поддерживаемых V-образной структурой 56, чтобы образовать V-образную опору для трубопровода 2 (Фигура 4); и два направляющих шкива 59 троса, каждый прикрепленный к салазкам 36 шарнирно-сочлененным механизмом 60 (Фигура 2), чтобы перемещать направляющий шкив 59 троса между рабочим положением (Фигуры 8, 9) и положением покоя (Фигура 4). В примере с Фигур 8-10, каждый шарнирно-сочлененный механизм 60 содержит рычаг 61, шарнирно соединенный с одной из концевых пластин 57, и поддерживающий направляющий шкив 59 троса; и привод 62 - в показанном примере, гидравлический цилиндр двустороннего действия - шарнирно соединенный с концевой пластиной 57 и рычагом 61.
Со ссылкой на Фигуру 2 рычаг 61 поддерживает два выступа 63, расположенные на противоположных сторонах направляющего шкива 59 троса, чтобы направлять трос С (Фигура 9) на ролики 58.
Трос С присоединен к лебедке (не показана) и используется в экстренных случаях, делающих необходимым оставление трубопровода 2 на морском дне вследствие плохой погоды. В этом случае конец трубопровода 2 соединен с тросом С, который направляется направляющими шкивами 59 троса, которые выполняют ту же функцию, чтобы извлечь трубопровод 2 с морского дна, когда морские условия позволят продолжить укладку. Когда направляющие шкивы 59 троса находятся в рабочем положении, трос С удерживается свободным от, и, таким образом, предотвращается его запутывание с роликов 58. Затем направляющие шкивы 5 9 троса опускаются ниже роликов 58, чтобы избежать столкновения с трубопроводом 2, как показано на Фигуре 4.
Со ссылкой на Фигуры 8 и 9, узел 40 силового привода присоединен к раме 39 и салазкам 36 и содержит качающийся рычаг 64, шарнирно соединенный с жесткой структурой 53 рамы 39 вокруг оси В2 параллельно оси В1; привод 65 - в показанном примере, винтовая пара и шаговый электродвигатель - шарнирно соединенный с одним концом качающегося рычага 64 и рамой 39; и гаситель 66 колебаний, шарнирно соединенный на одном конце с салазками 36 и на другом конце с концом качающегося рычага 64, противоположного концу, к которому шарнирно присоединен привод 65. В показанном примере, гаситель 66 колебаний является гидравлическим цилиндром двустороннего действия, таким образом, жесткость гасителя 66 колебания может регулироваться в зависимости от давления в гидравлическом цилиндре двустороннего действия.
В варианте с Фигуры 10 качающийся рычаг 64 и привод 65 опущены, и гаситель 66 колебаний присоединен непосредственно к салазкам 36 и раме 39, таким образом, гидравлический цилиндр двустороннего действия, образующий гаситель 66 колебаний, служит для выборочного регулирования расстояния между салазками 36 и рамой 39, и чтобы гасить колебания от салазок 36.
Таким образом, направляющее устройство 35 способно выполнять следующие перемещения:
- грубое регулирование расстояния между салазками 36 и укладочной рампой 6 путем выборочного прикрепления поперечной балки 42 вдоль стоек 33;
- точное регулирование расстояния между салазками 36 и рамой 37 посредством узла 40 силового привода;
- качание салазок 36 свободно вокруг оси В1;
- перемещение салазок 36 свободно относительно укладочной рампы 6 и параллельно оси В1 в случае наружного давления, и расположение салазок по центру, как только давление, создающее боковое перемещение салазок, снимается;
- выборочное перемещение направляющих шкивов 59 троса между рабочим положением и положением покоя.
Перемещения салазок 36 и направляющих шкивов 59 троса управляются с удаленного терминала, в частности, устройством 67 управления на борту судна с Фигуры 1.
Направляющее устройство 35, описанное со ссылкой на сопровождающие чертежи, является предпочтительным вариантом выполнения настоящего изобретения, к которому могут быть сделаны изменения, такие как использование только одного вала 45 и только одного узла 46 силового привода с двумя втулками 50, чтобы поглощать боковое перемещение салазок 36 на обеих сторонах.
Также привод 52 узла 46 силового привода может быть замещен пружиной или множеством пружин.
Со ссылкой на Фигуру 1 судно 1 снабжено устройством 67 управления, содержащим блок 68 управления; консоль 69; гидравлический центральный блок 70 управления; первые датчики 73, каждый для определения нагрузок, передаваемых между трубопроводом 2 и направляющим устройством 35 в направлении D2; вторые датчики 74 для определения расстояния между салазками 36 и рамой 39 в направлении D2; третьи датчики 71 и 72 для определения расположения укладочной рампы 6; и четвертые датчики 75 для определения напряжения на трубопроводе 2 вдоль монтажной линии 5; причем устройство 67 управления корректирует расстояние между каждыми салазками 36 и соответствующей первой рамой 37 в зависимости от зарегистрированных нагрузок и матрицы оптимального распределения нагрузок между направляющими устройствами 35.
Все датчики 71, 72, 73, 74, 75 схематично показаны на Фигуре 1. Более конкретно, третьи датчики 71 и 72 являются датчиками расстояния, равно распределенными по направляющим 19 и по направляющим 22, 23, 24 соответственно, чтобы определять положение соответствующих кареток 20 и 25 и вычислять расположение укладочной рампы 6 соответственно.
Для ясности показаны только два первый и второй датчики 73 и 74, однако, с тем пониманием, что каждое направляющее устройство 35 снабжено, по меньшей мере, одним первым датчиком 73 и, по меньшей мере, одним вторым датчиком 74. Первые датчики 73 являются традиционными датчиками нагрузки, расположенные вдоль каждого направляющего устройства 35, и вторые датчики 74 являются традиционными линейными датчиками перемещения или кодовыми датчиками положения, расположенные, чтобы определять расстояние между салазками 36 и рамой 39.
Четвертый датчик 75 служит для определения напряжения на трубопроводе 2. Более конкретно, четвертый датчик 75 присоединен к натяжному устройству 76, прикрепленному в свою очередь к судну 1, и которое разъемно захватывает трубопровод 2, чтобы натянуть и остановить подачу трубопровода 2 к укладочной рампе 6 известным способом.
Со ссылкой на Фигуру 11 устройство 67 управления присоединено к четырем направляющим устройствам 35. Однако следует иметь ввиду, что количество направляющих устройств 35 на Фигуре 4 ограничено четырьмя только для простоты, с тем пониманием, что устройство 67 управление присоединено ко всем направляющим устройствам 35, оснащающим укладочную рампу 6 с Фигуры 1, и что не существует технических или структурных ограничений.
В примере расположения на Фигуре 11, блок 68 управления содержит модуль 77 сбора данных, который образует матрицу сигналов, соответствующих нагрузкам и положениям, вырабатываемых соответственно первыми и вторыми датчиками 73 и 74 направляющих устройств 35; модуль 77 сбора данных, который получает сигналы, соответствующие расположению укладочной рампы (Фигура 1) и напряжению на трубопроводе 2, и образует матрицу оптимальных нагрузок и оптимальных положений направляющих устройств 35 соответственно; модуль 79 вычитания, который выполняет вычитание между матрицей сигналов, соответствующих зарегистрированным нагрузкам и положениям, и матрицей оптимальных нагрузок и положений; и модуль 80 вычисления, который вычисляет матрицу сигналов ошибки в зависимости от разности между первой и второй матрицы, и корректирует положение салазок 3 6 каждого направляющего устройства 35 относительно соответствующей первой рамы 37 посредством управления приводами 65.
Гидравлический центральный блок 70 управления содержит насос (не показан); и распределитель (не показан) для распределения текучей среды под давлением выборочно к приводам 52, 62 и 65 каждого направляющего устройства 35.
Консоль 69 служит для отображения сигналов, выработанных датчиками 71, 72, 73, 74, 75; выбора рабочих режимов; и ввода вручную значений настройки укладочной рампы 6.
Данные о положении каждого направляющего устройства 35 относительно соответствующих стоек 33 вводится вручную на консоли 69, которая вырабатывает сигналы, соответствующие элементам данных и получаемые модулем 78 сбора данных, чтобы вычислить матрицу оптимальных нагрузки и положения.
Рабочие режимы, выполняемые с консоли 69, приблизительно следующие:
ввод данных, соответствующих положению направляющих устройств 35 относительно стоек 33 укладочной рампы (Фигура 1);
укладка с автоматическим позиционированием салазок 36 направляющих устройств 35 на основе получаемых сигналов о нагрузке и положении;
- регулировка жесткости приводами 52 и гасителем 66 колебаний;
- управление вручную приводами 65, чтобы задать положение каждой салазки 36 вдоль оси D2 и форму изгиба трубопровода 2 на укладочной рампе 6;
- аварийный режим, который содержит подъем направляющих шкивов 59 троса из положения покоя в рабочее положение (приводы 62);
- режим извлечения, который содержит опускание направляющих шкивов 59 троса из рабочего положения в положение покоя (приводы 62);
Матрица оптимальных нагрузки и положения, то есть идеальное распределение нагрузки на направляющих устройствах 35, может быть определена на основе следующих основных принципов:
путь Р1 трубопровода 2 не должен превышать допустимые пределы изгибания;
нагрузки, передаваемые между трубопроводом 2 и направляющими устройствами 35, должны распределяться по существу равномерно, то есть, не перегружая и не недогружая направляющие устройства 35;
- любые колебания должны рассеиваться.
Настоящее изобретение описывает предпочтительный вариант выполнения, в котором управление выполняется в зависимости от сигналов, соответствующих передаче нагрузки между трубопроводом 2 и направляющими устройствами 35, и сигналов, соответствующих положениям направляющих устройств 35 со ссылкой на оптимальные значения нагрузки и положения; однако с пониманием того, что управление может выполняться другими способами, управлением положения направляющих устройств 35 только в зависимости от сигналов, связанных с нагрузкой, и оптимальных значений нагрузки, и только в зависимости от сигналов, связанных с положением, и оптимальных значений положения.
В добавок в вышесказанному, в альтернативном расположении на Фигуре 10, положение салазок 36 задается только управлением приводами 65.
Настоящее изобретение имеет многочисленные преимущества. В частности, каждое направляющее устройство 35 очень подвижно и помимо регулирования расстояния между салазками 36 и рамой 37, также позволяет боковое перемещение салазок 36 относительно укладочной рампы 6, таким образом, также поглощая боковые колебания. Каждый гаситель 66 колебаний является гидравлическим приводом, который поглощает колебания в направлении D2, в то же время, позволяя регулировку жесткости гасителя 66 колебаний. В варианте выполнения с Фигуры 10, гаситель 66 колебаний также служит для регулировки положения салазок 36.
Более того, помимо осуществления различных перемещений и регулировок, направляющее устройство 35 является очень компактным и легко управляется как вручную, так и автоматически с удаленного терминала на борту укладочного судна 1.
Более того, устройство 67 управления обеспечивает оптимизацию передачи нагрузки между трубопроводом и направляющим устройством 35 автоматически, и уменьшение напряжения в трубопроводе 2, по мере того, как он укладывается.







Группа изобретений относится к строительству подводных трубопроводов, а также к устройствам для управления укладкой трубопровода с судна. Направляющее устройство (35) для поддерживания подводного трубопровода (2) вдоль направления (Р1) подачи по мере того, как он укладывается, смонтировано к укладочной рампе (6) и имеет салазки (36), вмещающие трубопровод (2); раму (37), прикрепленную к укладочной рампе (6); и распорный механизм (38), расположенный между рамой (37) и салазками (36) для выборочного регулирования расстояния между салазками (36) и рамой (37) и имеющий гаситель (66) колебаний, присоединенный к салазкам (36). 4 н. и 27 з.п. ф-лы, 11 ил.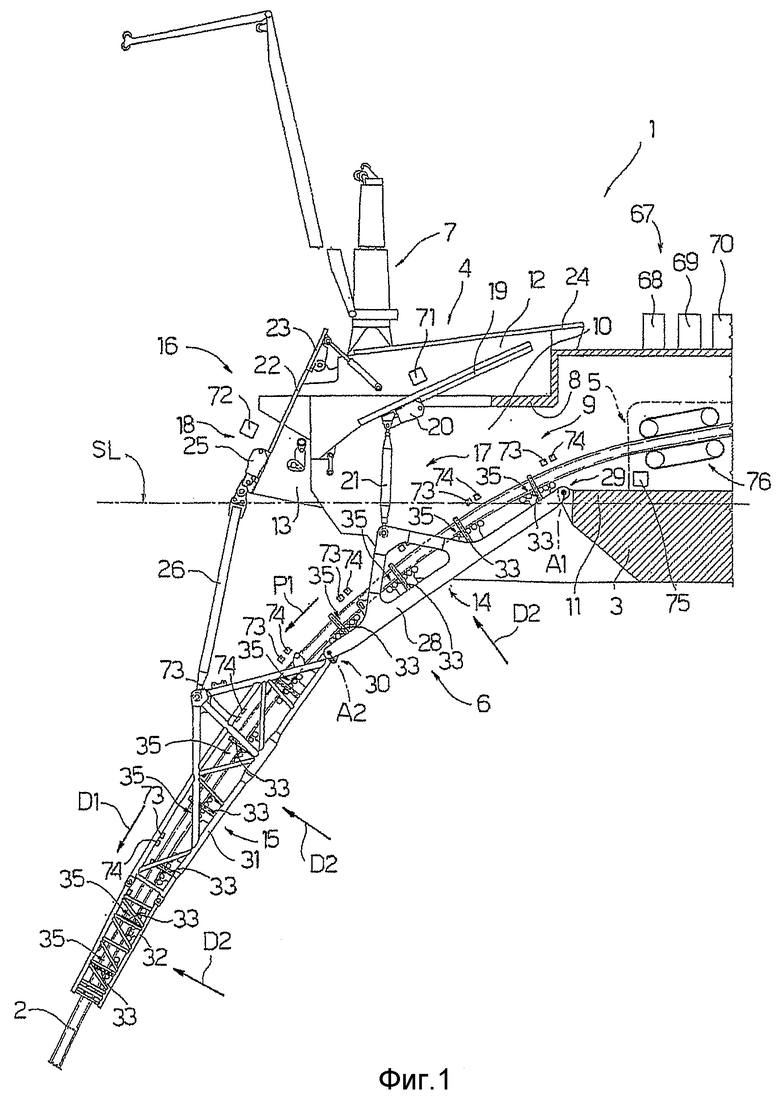
1. Направляющее устройство (35), для поддерживания подводного трубопровода (2) вдоль направления (Р1) подачи, по мере того, как он укладывается, причем направляющее устройство (35) смонтировано к укладочной рампе (6), и содержит салазки (36), вмещающие трубопровод (2); первую раму (37), прикрепленную к укладочной рампе (6); и распорный механизм (38), расположенный между первой рамой (37) и салазками (36), для выборочного регулирования расстояния между салазками (36) и первой рамой (37), отличающееся тем, что распорный механизм содержит, по меньшей мере, один гаситель (66) колебаний, присоединенный к салазкам (36); вторую раму (39), присоединенную к первой раме (37) для осуществления вращения вокруг оси (В1) поперек направления (Р1) подачи; и качающийся рычаг (64), соединенный поворотно со второй рамой (39); и первый привод (65), шарнирно соединенный с качающимся рычагом (64) и второй рамой (39); причем гаситель (66) колебаний шарнирно соединен с качающимся рычагом (64) и салазками (36).
2. Устройство по п.1, отличающееся тем, что салазки (36) шарнирно соединены со второй рамой (39) соединительными штангами (41) для образования шарнирно-сочлененного четырехугольника второй рамой (39) и соединительными штангами (41).
3. Устройство по п.1 или 2, отличающееся тем, что гаситель (66) колебаний присоединен непосредственно к салазкам (36) и второй раме (39).
4. Устройство по п.1, отличающееся тем, что гаситель (66) колебаний является гидравлическим приводом с изменяемой жесткостью.
5. Устройство по п.1, отличающееся тем, что первая рама (37) содержит, по меньшей мере, первый вал (45), выровненный по оси (В1); вторую раму (39), содержащую, по меньшей мере, первую втулку (55), установленную с возможностью вращения вокруг первого вала (45) и перемещения вдоль первого вала (45), для осуществления одновременного поворота салазок (36) вокруг оси (В1) и перемещения вдоль оси (В1).
6. Устройство по п.5, отличающееся тем, что содержит, по меньшей мере, один узел (46) силового привода, продолжающийся между первой рамой (37) и распорным механизмом (38), чтобы расположить салазки (36) по центру вдоль оси (В1) относительно первой рамы (37).
7. Устройство по п.6, отличающееся тем, что содержит два узла (46) силового привода, расположенных на противоположных сторонах второй рамы (39); причем каждый узел (46) силового привода продолжается между первой рамой (37) и второй рамой (39), чтобы центрировать вторую раму (39) относительно первой рамы (37) вдоль оси (В1).
8. Устройство по п.7, отличающееся тем, что каждый узел (46) силового привода содержит вторую втулку (50), выполненную с возможностью перемещения вдоль первого вала (45), и второй привод (52), чтобы толкать вторую втулку (50) вдоль первого вала (45) к первой втулке (55).
9. Устройство по п.8, отличающееся тем, что каждый узел (46) силового привода содержит рычаг (51), шарнирно соединенный с первой рамой (37) и второй втулкой (50), причем первый привод (52) шарнирно соединен с первой рамой (37) и рычагом (51).
10. Устройство по п.9, отличающееся тем, что содержит два направляющих шкива (59) троса, присоединенных к двум противоположным торцам салазок (36) вдоль направления (Р1) подачи; причем каждый направляющий шкив (59) троса смонтирован к салазкам (36) шарнирно-сочлененным механизмом (60), содержащим третий привод (62) для перемещения направляющего шкива (59) троса выборочно между рабочим положением и положением покоя.
11. Укладочная рампа (6) для укладки подводного трубопровода, причем укладочная рампа (6) шарнирно соединена с судном (1), чтобы принимать множество рабочих расположений, и содержит несущие конструкции (28, 31, 32; 28, 31; 28), вдоль которых выровнены направляющие устройства (35), каждый по любому из пп.1-10, отличающаяся тем, что содержит множество стоек (33), расположенных парами противоположных стоек (33), и первую раму (37) каждого направляющего устройства (35), присоединенную к противоположным стойкам (33) в соответствующей паре.
12. Укладочная рампа по п.11, отличающаяся тем, что первая рама (37) подвижно присоединена к соответствующей паре стоек (33).
13. Укладочная рампа по п.12, отличающаяся тем, что первая рама (37) выполнена с возможностью закрепления во множестве заданных положений вдоль соответствующих стоек (33).
14. Укладочная рампа по п.13, отличающаяся тем, что первая рама (37) выполнена с возможностью прикрепления к соответствующим стойкам (33) средством крепления, зацепляющим отверстия (47; 34) в первой раме (37) и стойках (33).
15. Укладочное судно для укладки подводного трубопровода, содержащее монтажную линию (5) для сооружения подводных трубопроводов (2); укладочную рампу (6) подводного трубопровода (2) по любому из пп.11-14; и приводной узел (16) укладочной рампы (6) для установки укладочной рампы (6) во множество рабочих расположений, отличающееся тем, что содержит устройство (67) управления для управления расстоянием между каждыми салазками (36) и соответствующей первой рамой (37) в зависимости от матрицы оптимальных значений.
16. Укладочное судно по п.15, отличающееся тем, что устройство (67) управления содержит блок (68) управления; гидравлический центральный блок (70) управления; и первые датчики (73) для вырабатывания первых сигналов, соответствующих нагрузкам, передаваемым каждому направляющему устройству (35) трубопроводом (2); причем устройство (67) управления корректирует расстояние между каждыми салазками (36) и соответствующей первой рамой (37) в зависимости от зарегистрированных нагрузок и матрицы оптимального распределения нагрузок между направляющими устройствами (35).
17. Укладочное судно по п.15 или 16, отличающееся тем, что устройство (67) управления содержит блок (68) управления; гидравлический центральный блок (70) управления; и вторые датчики (74) для вырабатывания вторых сигналов, соответствующих положениям салазок (36) относительно соответствующих первых рам (37); причем устройство (67) управления корректирует расстояние между каждыми салазками (36) и соответствующей первой рамой (37) в зависимости от вторых сигналов и матрицы оптимальных значений относительного положения салазок (37) и соответствующих первых рам (37).
18. Укладочное судно по п.15 или 16, отличающееся тем, что устройство (67) управления содержит третьи датчики (71; 72) для вырабатывания третьих сигналов, соответствующих рабочим расположениям укладочной рампы (6).
19. Укладочное судно по п.16, отличающееся тем, что содержит натяжное устройство (76) для натяжения трубопровода (2); причем устройство (67) управления содержит четвертые датчики (75) для вырабатывания четвертых сигналов, соответствующих напряжению, передаваемому от трубопровода (2) натяжному устройству (76).
20. Укладочное судно по п.16, отличающееся тем, что устройство (67) управления содержит консоль (69), присоединенную к блоку (68) управления и для ввода данных, соответствующих положениям направляющих устройств (35) относительно укладочной рампы (6), и вырабатывания пятых сигналов, соответствующих введенным данным; отображение первых, вторых, третьих и четвертых сигналов; и ручное управление направляющими устройствами (35).
21. Укладочное судно по п.16, отличающееся тем, что блок (68) управления содержит первый модуль (77) сбора данных, который получает первые и вторые сигналы для образования первой матрицы, соответствующей зарегистрированным нагрузкам; второй модуль (78) сбора данных, который получает третьи, четвертые и пятые сигналы для образования второй матрицы оптимальных нагрузок; модуль (79) вычитания, который вычисляет разность между первой и второй матрицей; и модуль (80) вычисления, который вычисляет матрицу сигналов ошибки в зависимости от разности между первой и второй матрицы, и корректирует положение салазок (36) каждого направляющего устройства относительно соответствующей первой рамы (37).
22. Способ управления укладочной рампой для подачи подводного трубопровода (2) вдоль направления (Р1) подачи, причем укладочная рампа (6) шарнирно соединена с укладочным судном (1), чтобы принимать множество рабочих расположений, и содержит несущую конструкцию (28, 31, 32; 28, 31; 28), вдоль которой выравнивают направляющие устройства (35), причем каждое содержит салазки (36), вмещающие трубопровод (2); первую раму (37), прикрепленную к укладочной рампе (6); и распорный механизм (38), расположенный между первой рамой (37) и салазками (36); причем в способе осуществляют выборочное регулирование, для каждого направляющего устройства (35), расстояния между салазками (36) и соответствующей первой рамой (37), отличающийся тем, что осуществляют выборочную регулировку, для каждого направляющего устройства (35), расстояния между салазками (36) и соответствующей первой рамой (37) в зависимости от матрицы оптимальных значений и регулировку жесткости гасителя (66) колебаний, расположенного между салазками (36) и соответствующей первой рамой (37).
23. Способ по п.22, отличающийся тем, что осуществляют регулировку расстояния между каждыми салазками (36) и соответствующей первой рамой (37) посредством дистанционно управляемого первого привода (65).
24. Способ по п.22 или 23, отличающийся тем, что осуществляют регулировку положения каждого направляющего устройства (35) вдоль стоек (33), прикрепленных к несущей конструкции (28, 31, 32; 28, 31; 28) укладочной рампы (6).
25. Способ по п.22, отличающийся тем, что осуществляют получение первых сигналов, соответствующих нагрузкам, передаваемым между каждым направляющим устройством (35) и трубопроводом (2), и регулировку расстояния между каждыми салазками (36) и соответствующей первой рамой (37) в зависимости от первых сигналов и матрицы оптимальных значений нагрузок.
26. Способ по п.22, отличающийся тем, что получают сигналы, соответствующие относительным положениям салазок (36) и соответствующих первых рам (37); и регулировку расстояния между каждыми салазками (36) и соответствующей первой рамой (37) в зависимости от вторых сигналов и матрицы оптимальных значений относительного положения салазок (36) и соответствующих первых рам (37).
27. Способ по п.25, отличающийся тем, что получают третьи сигналы, соответствующие рабочим расположениям укладочной рампы (6).
28. Способ по п.27, отличающийся тем, что получают четвертые сигналы, соответствующие напряжению, передаваемому между трубопроводом (2) и натяжным устройством (76) для натяжения трубопровода (2).
29. Способ по п.28, отличающийся тем, что получают пятые сигналы соответствующие относительным положениям направляющих устройств (35) и укладочной рампы (6).
30. Способ по п.29, отличающийся тем, что образуют первую матрицу первых и вторых сигналов, соответствующих зарегистрированным нагрузкам и зарегистрированным относительным положениям, и вторую матрицу оптимальных нагрузок и оптимальных положений в зависимости от третьих, четвертых и пятых сигналов; вычисляют разность между первой и второй матрицей; и вычисляют матрицу сигналов ошибки в зависимости от разности между первой и второй матрицей, чтобы корректировать положение салазок (36) каждого направляющего устройства (35) относительно соответствующей первой рамы (37).
31. Способ по п.29, отличающийся тем, что образуют первую матрицу первых и вторых сигналов, соответствующих зарегистрированным нагрузкам и зарегистрированным относительным положениям, и вторую матрицу оптимальных нагрузок и оптимальных положений в зависимости от третьих, четвертых и пятых сигналов; вычисляют разность между первой и второй матрицей; и вычисляют матрицу сигналов ошибки в зависимости от разности между первой и второй матрицей, чтобы корректировать положение салазок (36) каждого направляющего устройства (35) относительно соответствующей первой рамы (37).
| US 4030311 А, 21.06.1977 | |||
| WO 9608605 А2, 21.03.1996 | |||
| US 3487648 А, 06.01.1970 | |||
| ЕР 1063163 А2, 27.12.2000 | |||
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |

