Настоящее изобретение относится к способу укладки трубопровода с укладочного судна в водоем.
Более конкретно, представленное изобретение относится к способу, который направляет трубопровод вдоль несущей конструкции спусковой аппарели посредством ряда направляющих устройств, разделенных промежутками вдоль несущей конструкции, и освобождает трубопровод в водоем на свободном конце спусковой аппарели.
Укладочное судно представляет собой плавучее основание, которое содержит линию сборки трубопровода и оборудовано на корме спусковой аппарелью, которая является продолжением линии сборки и служит для спуска трубопровода на дно водоема по мере продвижения плавучего основания вперед.
Укладочные суда включают суда для S-образной укладки трубопровода приведенного выше типа, которые описаны, например, в Патентной Заявке WO 2009/098586 A2, и суда для J-образной укладки трубопровода типа, описанного в Патенте EP 1102698 B1.
В способе S-образной укладки трубопровода трубопровод собирают на по существу горизонтальной линии сборки и укладывают со спусковой аппарели, которая в рабочей конфигурации служит для направления и поддержки трубопровода вдоль изогнутой траектории частично выше и частично ниже уровня воды. Трубопроводы, уложенные таким образом, принимают форму S между укладочным судном и дном водоема, с радиусом кривых, зависящим от жесткости трубопровода, и могут быть уложены, используя различные типы судов, такие как понтоны, баржи, полупогружные и однокорпусные суда.
Укладывание подводного трубопровода требует довольно спокойных водных условий, до такой степени, что во время волнения укладывание приостанавливают, завершенную часть трубопровода оставляют, используя управляемый лебедкой канат, а спусковую аппарель поднимают по мере возможности над уровнем воды в так называемую аварийную конфигурацию.
Спусковая аппарель обычно содержит внутреннюю аппарель, соединенную шарнирно с укладочным судном, и внешнюю аппарель, соединенную шарнирно с внутренней аппарелью, и может принимать различные рабочие конфигурации, в зависимости от глубины дна и характеристик трубопровода; транзитную конфигурацию, в которой внутренняя и внешняя аппарели позволяют беспрепятственное движение укладочного судна; и указанную аварийную конфигурацию. Для этой цели спусковую аппарель соединяют с укладочным судном посредством известного узла исполнительных механизмов, который описан, например, в патенте заявителя US 4257718.
Для направления и передвижения трубопровода вперед спусковая аппарель содержит ряд направляющих устройств, выровненных для образования траектории трубопровода.
В способе J-образной укладки трубопровода линию сборки трубопровода помещают по меньшей мере частично в башню для J-образной укладки трубопровода, соединенную шарнирно с укладочным судном, а трубопровод направляют посредством спусковой аппарели, обычно прикрепленной к башне для J-образной укладки трубопровода. В данном случае, как тоже описано в Патенте EP 1102698 B1, регулируемые направляющие устройства устанавливают на спусковую аппарель, поддерживающую конструкцию для направления трубопровода по мере его укладывания, и для отслеживания напряжения между трубопроводом и несущей конструкцией.
В обоих приведенных выше способах укладки необходимо отслеживать напряжение между трубопроводом и несущей конструкцией спусковой аппарели для предотвращения повреждения трубопровода и/или спусковой аппарели. В связи с этим важно помнить, что при укладывании трубопровода укладочное судно и аппарель, с одной стороны, и трубопровод, с другой, подвергаются водой различным формам напряжения. Укладочное судно, несмотря на удерживание в нужном положении и продвижение поэтапно вдоль заданного направления посредством системы якорных оттяжек или так называемой системы динамического позиционирования, содержащей подруливающие устройства, все-таки подвергается нежелательным движениям, вызываемым волнами и течениями воды. Такое же действие волн и течения также оказывают воздействие на трубопровод, но вследствие различия в форме и массе укладочного судна и трубопровода и того, что трубопровод является по существу гибким и частично покоится на дне, вызывают разные движения спусковой аппарели и трубопровода. Перекос в продольном направлении и вращение укладочного судна являются особенно опасными, вызывая сильный контакт между трубопроводом и спусковой аппарелью; а известные системы отслеживания напряжения между трубопроводом и несущей конструкцией спусковой аппарели демонстрируют слабую эффективность в предотвращении критических условий эксплуатации трубопровода и спусковой аппарели.
Задачей настоящего изобретения является обеспечение способа укладки трубопровода с укладочного судна в водоем, разработанного для минимизации недостатков известного уровня техники.
Еще одной задачей представленного изобретения является предоставление способа укладки трубопровода с укладочного судна в водоем, разработанного для предотвращения ситуаций, создающих угрозу безопасности для трубопровода и/или спусковой аппарели.
Согласно представленному изобретению предоставлен способ укладки трубопровода с укладочного судна в водоем; при этом способ включает стадии: направления трубопровода вдоль несущей конструкции спусковой аппарели посредством ряда направляющих устройств; получения изображений трубопровода, предпочтительно в плоскости регистрации, поперечной оси трубопровода, на свободном конце спусковой аппарели; определения, находится ли полученное изображение в пределах допустимого диапазона, предварительно заданного в виде функции конфигурации несущей конструкции и размера трубопровода; и подачи сигнала ошибки, когда полученное изображение не находится в пределах допустимого диапазона.
Представленное изобретение обладает большим преимуществом идентификации ситуаций, в которых внешние факторы и движение судна доставляют трубопровод в опасную близость к несущей конструкции, и обозначения потенциальной опасности на свободном конце спусковой аппарели, когда движения между трубопроводом и несущей конструкцией являются наибольшими.
Предпочтительные варианты осуществления представленного изобретения могут предусматривать автоматическое регулирование направляющих устройств относительно несущей конструкции согласно сигналу ошибки, и/или регулирование несущей конструкции согласно сигналу ошибки, и/или регулирование положения укладочного судна, и/или регулирование натяжения трубопровода укладочным судном согласно сигналу ошибки. В способе допустимый диапазон может быть определен информацией, хранящейся в памяти. В частных формах выполнения изобретения способ включает: стадию изменения конфигурации направляющих устройств относительно несущей конструкции в виде функции сигнала ошибки; стадию изменения конфигурации несущей конструкции в виде функции сигнала ошибки; стадию регулирования положения укладочного судна в виде функции сигнала ошибки; стадию регулирования силы, которой обмениваются натяжное устройство и трубопровод, для осуществления регулирования натяжения, прикладываемого к трубопроводу, в виде функции сигнала ошибки; стадию определения расстояния между трубопроводом и несущей конструкцией на свободном конце спусковой аппарели. Также в частных формах выполнения изобретения в способе изображением является акустическое изображение поверхности трубопровода и способ может включать стадию получения дополнительного акустического изображения в той же самой плоскости регистрации, что и акустическое изображение, и вдоль дополнительной поверхности трубопровода, либо в способе указанным изображением является оптическое изображение поверхности трубопровода, при этом способ предпочтительно включает освещение трубопровода вдоль плоскости регистрации, в частности лазерным лучом, который обследует всю поверхность трубопровода вдоль плоскости регистрации, и способ может включать стадию получения второго оптического изображения в той же самой плоскости регистрации, что и первое оптическое изображение и вдоль дополнительной поверхности трубопровода.
Все указанные выше стадии могут предотвращать ухудшение опасных ситуаций, и предотвращать аварии.
Еще одна задача представленного изобретения состоит в создании укладочного судна. Согласно представленному изобретению предоставлено укладочное судно для укладки трубопровода в водоеме; при этом укладочное судно содержит: спусковую аппарель, содержащую несущую конструкцию и ряд направляющих устройств для направления трубопровода; устройство получения изображений для получения изображений трубопровода, предпочтительно в плоскости регистрации, поперечной оси трубопровода, на свободном конце спусковой аппарели; и блок управления для определения, находится ли полученное изображение в пределах допустимого диапазона, предварительно заданного в виде функции конфигурации несущей конструкции и размера трубопровода, и для подачи сигнала ошибки, когда полученное изображение не находится в пределах допустимого диапазона.
В частных формах осуществления изобретения укладочное судно для укладки трубопровода может содержать: устройство управления для управления изменяемой конфигурацией направляющих устройств и которое соединено с блоком управления и выполнено с возможностью изменения конфигурации направляющих устройств относительно несущей конструкции в виде функции сигнала ошибки; узел привода для изменения конфигурации спусковой аппарели; и устройство управления для управления узлом привода в виде функции сигнала ошибки; плавающую конструкцию; башню для J-образной укладки трубопровода, соединенную шарнирно с плавающей конструкцией; узел привода для изменения конфигурации башни для J-образной укладки трубопровода; и устройство управления для управления узлом привода и конфигурацией башни для J-образной укладки трубопровода в виде функции сигнала ошибки; устройство управления для управления положением укладочного судна, которое соединено с блоком управления и выполнено с возможностью управления положением укладочного судна в виде функции сигнала ошибки; натяжное устройство, выполненное с возможностью обмена силой с трубопроводом и приложения натяжения к трубопроводу; и устройство управления, соединенное с блоком управления и выполненное с возможностью регулирования силы, которой обмениваются натяжное устройство и трубопровод, для осуществления регулирования натяжения, прикладываемого к трубопроводу в виде функции сигнала ошибки; указанный блок управления, выполненный с возможностью определения расстояния между трубопроводом и несущей конструкцией на свободном конце спусковой аппарели; указанное устройство получения изображений, содержащее датчик, установленный на спусковую аппарель, для образования веерообразной зоны обнаружения, проходящей вдоль плоскости регистрации, перпендикулярной оси трубопровода; и блок обработки изображений; ряд устройств получения изображений, установленных на спусковую аппарель для получения изображений различных поверхностей трубопровода в одной и той же плоскости регистрации, перпендикулярной оси трубопровода; указанный датчик, являющийся оптическим датчиком для получения оптических изображений, или гидроакустический датчик для получения акустических изображений; указанное устройство получения изображений, содержащее источник света, в частности выполненный с возможностью излучения лазерного луча, который обследует всю поверхность трубопровода вдоль плоскости регистрации.
Ряд неограничивающих вариантов осуществления представленного изобретения описан в качестве примера со ссылкой на сопровождающие чертежи, на которых: фигура 1 показывает вид сбоку в частичном разрезе с удаленными для ясности деталями укладочного судна, оборудованного спусковой аппарелью и согласно представленному изобретению; фигура 2 показывает схематичное поперечное сечение с удаленными для ясности деталями спусковой аппарели фигуры 1; фигура 3 показывает вид сбоку в частичном разрезе с удаленными для ясности деталями укладочного судна, оборудованного спусковой аппарелью и согласно дополнительному варианту осуществления представленного изобретения; фигура 4 показывает схематичное поперечное сечение с удаленными для ясности деталями спусковой аппарели фигуры 3.
На фигуре 1 показано укладочное судно 1 для укладки трубопровода 2 на дно (не показано) водоема уровня SL. В показанном примере укладочное судно 1 представляет собой однокорпусное судно для S-образной укладки трубопровода и содержит корпус 3; ют 4; и линию 5 сборки для сборки трубопровода 2 из труб (не показаны). Укладочное судно 1 оборудовано спусковой аппарелью 6, образующей продолжение линии 5 сборки рабочей конфигурации на фигуре 1, и служит для направления и поддержки трубопровода 2 вдоль траектории, имеющей по меньшей мере один изогнутый участок, первый участок над уровнем SL воды и второй участок ниже уровня SL воды.
Укладочное судно 1 оборудовано на юте 4, краном 7 для выполнения вспомогательных операций укладывания трубопровода 2.
Спусковая аппарель 6 шарнирно соединена с укладочным судном 1 и содержит внутреннюю аппарель 8, соединенную шарнирно с укладочным судном 1, и внешнюю аппарель 9, соединенную шарнирно с внутренней аппарелью 8. А укладочное судно 1 содержит узел 10 привода для установки спусковой аппарели 6 в многочисленные рабочие конфигурации (только одна показана на фигуре 1); транзитную конфигурацию (не показана), в которой как внутренняя, так и внешняя аппарели 8, 9 расположены над уровнем SL воды; и аварийную конфигурацию (не показана на фигуре 1), в которой внутренняя и внешняя аппарели 8, 9 закреплены по мере возможности над уровнем SL воды.
Узел 10 привода содержит два исполнительных механизма 11, 12 для поддержки, регулирования и установки соответствующих внутренней и внешней аппарелей 8, 9 в перечисленные выше конфигурации. На укладывающей конфигурации на фигуре 1 внутренняя аппарель 8 и внешняя аппарель 9 образуют соответствующие поддерживающие участки для трубопровода 2.
Спусковая аппарель 6 содержит несущую конструкцию 13 и ряд направляющих устройств 14, разделенных промежутками вдоль несущей конструкции 13. В показанном примере внутренняя аппарель 8 содержит внутренний участок несущей конструкции 13, а внешняя аппарель 9 содержит внешний участок несущей конструкции 13, соединенный шарнирно с внутренним участком несущей конструкции 13.
T1 на фигуре 1 обозначает натяжное устройство, которое обменивается силой, предпочтительно силой зажима, с трубопроводом 2 для приложения натяжения к трубопроводу 2 с целью освобождения трубопровода 2 из укладочного судна 1 управляемым образом, или натяжения трубопровода 2 назад, или фиксации трубопровода 2 относительно укладочного судна 1.
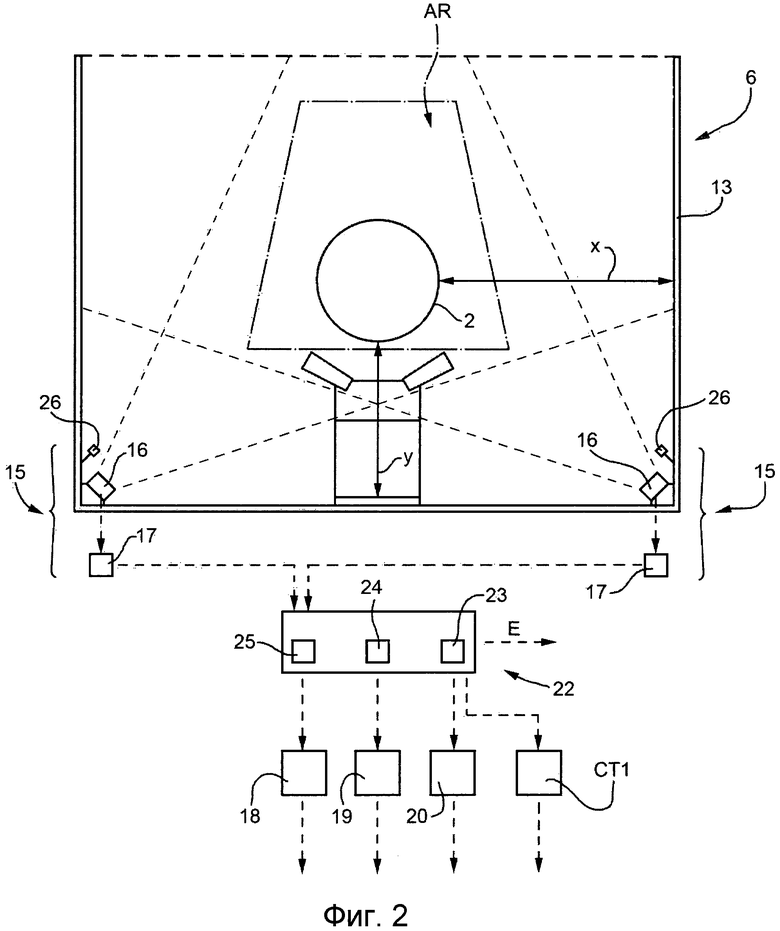
Со ссылкой на фигуру 2, несущая конструкция 13 простирается вдоль трех сторон, образуя пространство, вмещающее трубопровод 2. Более конкретно, фигура 2 показывает свободный конец несущей конструкции 13, когда относительные движения между трубопроводом 2 и спусковой аппарелью 6 являются наибольшими. Направляющее устройство 14 на свободном конце несущей конструкции 13 обычно не контактирует с трубопроводом 2 и служит для поглощения любой ударной нагрузки. Каждое направляющее устройство 14 амортизировано относительно несущей конструкции 13 и имеет исполнительные механизмы (не показаны) для регулирования своего активного положения относительно несущей конструкции 13 с целью оптимизации распределения нагрузки между трубопроводом 2 и спусковой аппарелью 6.
Со ссылкой на фигуру 1, укладочное судно 1 содержит устройство 15 получения изображений, в свою очередь, содержащее датчик 16, и блок 17 обработки, связанный с датчиком 16.
Укладочное судно 1 содержит устройство 18 управления для управления узлом 10 привода спусковой аппарели 6; устройство 19 управления для управления направляющими устройствами 14; устройство 20 управления для управления положением укладочного судна 1 - в показанном примере для управления системой динамического позиционирования, содержащей ряд подруливающих устройств 21 (только одно показано на фигуре 1); устройство CT1 управления для управления натяжным устройством T1 для регулирования силы, которой обмениваются трубопровод 2 и натяжное устройство T1, и вследствие этого натяжения, прикладываемого к трубопроводу; и блок 22 управления, соединенный с устройством 15 получения изображений и устройствами 18, 19, 20 управления и, в свою очередь, содержащий дисплей 23, панель 24 управления и память 25.
Со ссылкой на фигуру 2, датчик 16 установлен на несущей конструкции 13, на свободном конце спусковой аппарели 6 расположен с обращением к внешней поверхности трубопровода 2 и выполнен с возможностью образования веерообразной зоны получения изображений, расположенной по существу в плоскости регистрации, перпендикулярной оси трубопровода 2. Датчик 16 образован оптическим датчиком, поэтому устройство 15 получения изображений предпочтительно содержит источник 26 света, прикрепленный к несущей конструкции 13 для освещения трубопровода 2 в зоне получения изображений датчика 16; и блок 17 обработки изображений для обработки оптических изображений. В варианте датчик 16 образован гидролокатором, а блок 17 обработки изображений выполнен с возможностью обработки акустических изображений, поэтому источник света 26 не нужен.
Источник 26 света предпочтительно выполнен с возможностью излучения лазерного луча, четко показывающего трубопровод 2 в плоскости регистрации. Более конкретно, лазерный луч расположен и выполнен с возможностью обследовать всю поверхность трубопровода в плоскости регистрации.
Со ссылкой на фигуру 1, изображения, полученные с помощью устройства 15 получения изображений, передаются в блок 22 управления, где они сравниваются с изображениями, сохраненными в памяти 25. Сохраненными изображениями являются приемлемые реальные изображения известного трубопровода 2 или модели изображений, реконструированных на основании известных параметров трубопровода 2. В первом режиме сравнения, полученные изображения сравнивают с сохраненными изображениями для определения положения трубопровода 2 относительно несущей конструкции, и для определения координат X и Y, которые, в свою очередь, сравнивают с допустимым диапазоном AR, выраженным в координатах.
Во втором режиме сохраненные изображения образуют допустимый диапазон AR.
В обоих режимах блок 22 управления излучает сигнал E ошибки, когда трубопровод 2 не попадает в пределы допустимого диапазона AR, ограниченного по существу пунктирной линией на фигуре 2. Со ссылкой на фигуру 1, сигнал E ошибки может быть использован для корректировки конфигурации спусковой аппарели 6 и/или направляющих устройств 14, и/или положения укладочного судна 1, и/или натяжения, прикладываемого к трубопроводу 2 натяжным устройством T1. Другими словами, блок 22 управления способен автоматически управлять устройствами 18, 19, 20, CT1 управления в виде функции сигнала E ошибки и других входных сигналов, связанных с нагрузкой, передаваемой трубопроводом 2 направляющим устройствам 14, и с динамическим позиционированием укладочного судна 1.
Блок 22 управления может быть настроен работать автоматически только с некоторыми из устройств 18, 19, 20, CT1 управления.
Как показано на фигуре 2, спусковая аппарель 6 также оборудована дополнительным устройством 15 получения изображений, содержащим датчик 16, блок 17 обработки изображений, а источник 26 света в случае датчика 15 образован оптическим датчиком. Дополнительное устройство 15 получения изображений установлено для получения изображений трубопровода 2 в той же самой плоскости регистрации, что и другое устройство 15 получения изображений, но с другого угла. Изображения, полученные обоими устройствами 15 получения изображений, направляются в блок 22 управления для сравнения с соответствующими допустимыми диапазонами, и сигнал E ошибки подается, когда изображения, полученные по меньшей мере одним устройством 15 получения изображений, не попадают в пределы соответствующего допустимого диапазона AR. В результате получение изображений сделано более надежным и увеличивается диапазон, в пределах которого могут быть получены надежные изображения.
Изображения, полученные обоими устройствами 15 получения изображений, могут также быть объединены с реконструкцией положения трубопровода 2 относительно спусковой аппарели 6 и определением расстояния трубопровода от спусковой аппарели 6 в плоскости регистрации.
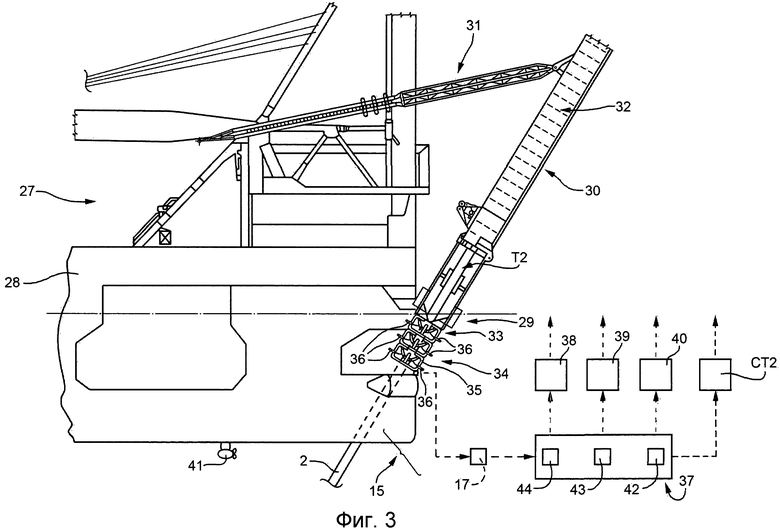
Номер 27 на фигуре 3 обозначает в целом полупогруженное укладочное судно, содержащее плавающую конструкцию 28 с двойным корпусом; шарнирный узел 29; башню 30 для J-образной укладки трубопровода, соединенную шарнирно с плавающей конструкцией 28 шарнирным узлом 29; и узел 31 привода для ориентирования башни 30 для J-образной укладки трубопровода вокруг оси шарнира в ряд конфигураций. Верхняя часть башни 30 для J-образной укладки трубопровода вмещает линию 32 сборки для сборки труб (не показаны); а нижняя часть вмещает натяжное устройство T2 для обмена силы, предпочтительно силы захвата, с трубопроводом для приложения натяжения к трубопроводу 2 для освобождения трубопровода 2 управляемым образом, или натяжения трубопровода 2 назад, или фиксации трубопровода относительно укладочного судна 27.
Нижний конец башни 30 для J-образной укладки трубопровода соединен со спусковой аппарелью 34, которая образует продолжение башни 30 для J-образной укладки трубопровода и, при использовании, погружается в водоем. Спусковая аппарель 34 жестко соединена с башней 30 для J-образной укладки трубопровода, поэтому конфигурация башни 30 для J-образной укладки трубопровода определяет конфигурацию спусковой аппарели 34.
Спусковая аппарель 34 содержит несущую конструкцию 35, тянущуюся вокруг трубопровода 2, и ряд направляющих устройств 36, которые установлены на несущей конструкции 35, разделены промежутками вокруг трубопровода 2 и вдоль несущей конструкции 35 и предпочтительно являются регулируемыми и управляемыми исполнительными механизмами, не показанными на чертежах.
Спусковая аппарель 34 оборудована устройством 15 получения изображений, расположенным на свободном конце несущей конструкции 35 для определения каких-либо рискованных положений трубопровода 2 относительно спусковой аппарели 34.
Изображения получают таким же путем, который описан для спусковой аппарели 6.
Укладочное судно 27 содержит блок 37 управления; устройство 38 управления для управления узлом 31 привода; устройство 39 управления для управления направляющими устройствами 36; устройство 40 управления для управления движением укладочного судна 27 - в данном случае динамическим позиционированием посредством подруливающих устройств 41 (только одно показано на фигуре 2); и устройство CT2 управления для управления силой, которой обмениваются натяжное устройство T2 и трубопровод 2, и вследствие этого натяжением, прикладываемым к трубопроводу. Как описано со ссылкой на фигуру 1, полученные изображения сравниваются с допустимым диапазоном AR, а блок 37 управления подает сигнал E ошибки, когда полученные изображения не попадают в пределы допустимого диапазона AR. Блок 37 управления содержит дисплей 42, панель 43 управления и память 44 и выполнен с возможностью как автоматического, так и ручного управления положением башни 30 для J-образной укладки трубопровода, и/или положением направляющих устройств 36, и/или движением укладочного судна 27, и/или натяжения, прикладываемого к трубопроводу 2, в виде функции сигнала E ошибки.
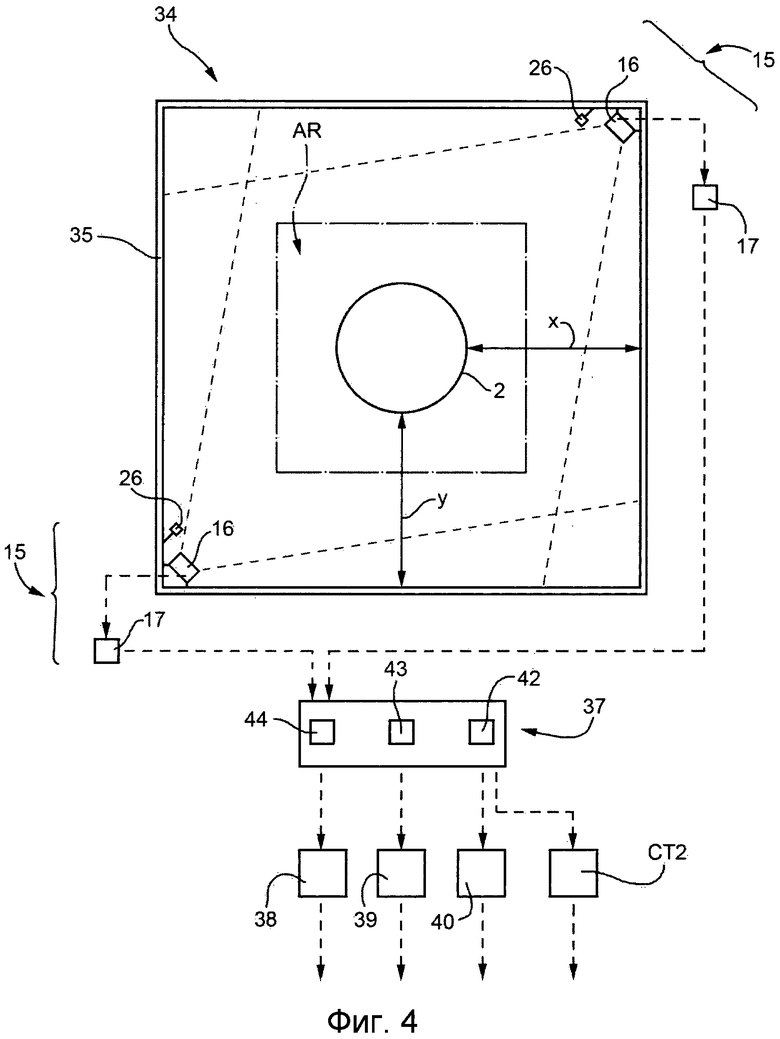
Как показано на фигуре 4, датчик 16 установлен на несущей конструкции 35, на свободном конце спусковой аппарели 34 и расположен с обращением к внешней поверхности трубопровода 2. В данном случае несущая конструкция 35 полностью окружает трубопровод 2, а датчик 16 образует веерообразную зону получения изображений, расположенную по существу в плоскости регистрации, перпендикулярной оси трубопровода 2. Датчик 16 образован оптическим датчиком, поэтому устройство 15 получения изображений предпочтительно содержит источник 26 света, прикрепленный к несущей конструкции 35 для освещения трубопровода 2 в зоне получения изображений датчика 16; и блок 17 обработки изображений для обработки оптических изображений. В варианте датчик 16 образован гидролокатором, а блок 17 обработки изображений выполнен с возможностью обработки акустических изображений, поэтому источник 26 света не нужен.
Как показано на фигуре 4, спусковая аппарель 34 также оборудована дополнительным устройством 15 получения изображений, содержащим датчик 16, блок 17 обработки изображений и источник 26 света, в случае когда датчик 15 образован оптическим датчиком. Дополнительное устройство 15 получения изображений установлено для получения изображений трубопровода 2 в той же самой плоскости регистрации, что и другое устройство 15 получения изображений, но с другого угла. Изображения, полученные обоими устройствами получения изображений, обрабатываются таким же образом, как в предшествующем варианте осуществления.
Главные преимущества представленного изобретения состоят в предотвращении принятия трубопроводом критических положений относительно спусковой аппарели; обеспечения немедленного вмешательства для противодействия любых критических ситуаций; и достаточно точного определения положения трубопровода относительно спусковой аппарели, как в воде, так и вне воды.
Понятно, что в вариантах осуществления представленного изобретения, описанных в данном документе, могут быть сделаны изменения, однако без выхода за пределы защищенного объема правовых притязаний сопровождающей формулы изобретения. Например, аппарель 6 может быть образована в виде одной жесткой части или содержать любое количество шарнирных участков.
Группа изобретений относится к строительству подводных трубопроводов. Способ укладки трубопровода с укладочного судна в водоем включает стадии: направления трубопровода (2) вдоль несущей конструкции (13) спусковой аппарели (6) посредством ряда направляющих устройств (14); получения изображений трубопровода (2) в плоскости регистрации, поперечной оси трубопровода (2), на свободном конце спусковой аппарели (6); определения, находится ли полученное изображение в пределах допустимого диапазона (AR), предварительно заданного в виде функции конфигурации несущей конструкции (13) и размера трубопровода (2); и подачи сигнала (Е) ошибки, когда полученное изображение не находится в пределах допустимого диапазона (AR). 2 н. и 20 з.п. ф-лы, 4 ил.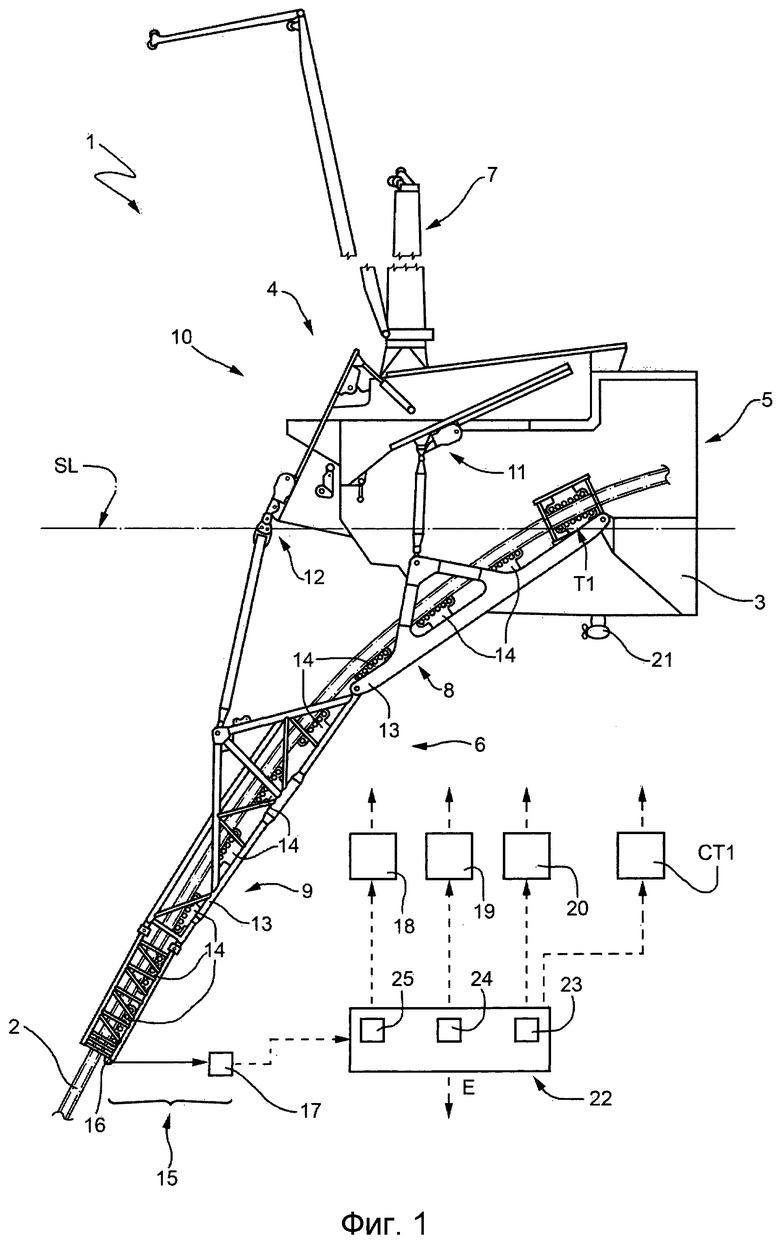
1. Способ укладки трубопровода с укладочного судна в водоем; включающий стадии, на которых:
- направляют трубопровод (2) вдоль несущей конструкции (13; 35) спусковой аппарели (6; 34) посредством ряда направляющих устройств (14; 36);
- получают изображения трубопровода (2), предпочтительно в плоскости регистрации, поперечной оси трубопровода (2), на свободном конце спусковой аппарели (6; 34);
- определяют, находится ли полученное изображение в пределах допустимого диапазона (AR), предварительно заданного в виде функции конфигурации несущей конструкции (13; 35) и размера трубопровода (2); и
- подают сигнал (Е) ошибки, когда полученное изображение не находится в пределах допустимого диапазона (AR).
2. Способ по п.1, включающий стадию изменения конфигурации направляющих устройств (14; 36) относительно несущей конструкции (13; 35) в виде функции сигнала (Е) ошибки.
3. Способ по п.1, включающий стадию изменения конфигурации несущей конструкции (13; 35) в виде функции сигнала (Е) ошибки.
4. Способ по п.1, включающий стадию регулирования положения укладочного судна (1; 27) в виде функции сигнала (Е) ошибки.
5. Способ по п.1, включающий стадию регулирования силы, которой обмениваются натяжное устройство (T1; T2) и трубопровод (2), для осуществления регулирования натяжения, прикладываемого к трубопроводу (2), в виде функции сигнала (Е) ошибки.
6. Способ по п.1, включающий стадию определения расстояния между трубопроводом (2) и несущей конструкцией (13; 35) на свободном конце спусковой аппарели (6; 34).
7. Способ по п.1, в котором изображением является акустическое изображение поверхности трубопровода (2).
8. Способ по п.7, включающий стадию получения дополнительного акустического изображения в той же самой плоскости регистрации, что и акустическое изображение, и вдоль дополнительной поверхности трубопровода (2).
9. Способ по п.1, в котором указанным изображением является оптическое изображение поверхности трубопровода (2); при этом способ предпочтительно включает освещение трубопровода (2) вдоль плоскости регистрации, в частности лазерным лучом, который обследует всю поверхность трубопровода (2) вдоль плоскости регистрации.
10. Способ по п.9, включающий стадию получения второго оптического изображения в той же самой плоскости регистрации, что и первое оптическое изображение, и вдоль дополнительной поверхности трубопровода (2).
11. Способ по п.1, в котором допустимый диапазон (AR) определяют информацией, хранящейся в памяти (25; 44).
12. Укладочное судно (1, 27) для укладки трубопровода (2) в водоеме, содержащее:
- спусковую аппарель (6; 34), содержащую несущую конструкцию (13; 35), и ряд направляющих устройств (14; 36) для направления трубопровода (2);
- устройство (15) получения изображений для получения изображений трубопровода (2), предпочтительно в плоскости регистрации, поперечной оси трубопровода (2), на свободном конце спусковой аппарели (6; 34); и
- блок (22; 37) управления для определения, находится ли полученное изображение в пределах допустимого диапазона (AR), предварительно заданного в виде функции конфигурации несущей конструкции (13; 35) и размера трубопровода (2), и для подачи сигнала (Е) ошибки, когда полученное изображение не находится в пределах допустимого диапазона (AR).
13. Укладочное судно по п.12, содержащее устройство (19) управления для управления изменяемой конфигурацией направляющих устройств (14), и которое соединено с блоком (22; 37) управления и выполнено с возможностью изменения конфигурации направляющих устройств (14; 36) относительно несущей конструкции (13; 35) в виде функции сигнала (E) ошибки.
14. Укладочное судно по п.12, содержащее узел (10) привода для изменения конфигурации спусковой аппарели (6); и устройство (18) управления для управления узлом привода в виде функции сигнала (E) ошибки.
15. Укладочное судно по п.12, содержащее плавающую конструкцию (28); башню (30) для J-образной укладки трубопровода, соединенную шарнирно с плавающей конструкцией (28); узел (31) привода для изменения конфигурации башни (30) для J-образной укладки трубопровода; и устройство (38) управления для управления узлом (31) привода и конфигурацией башни (30) для J-образной укладки трубопровода в виде функции сигнала (E) ошибки.
16. Укладочное судно по п.12, содержащее устройство (20; 40) управления для управления положением укладочного судна (1; 27) и которое соединено с блоком (22; 37) управления и выполнено с возможностью управления положением укладочного судна (1; 27) в виде функции сигнала (E) ошибки.
17. Укладочное судно по п.12, содержащее натяжное устройство (T1; T2), выполненное с возможностью обмена силой с трубопроводом (2) и приложения натяжения к трубопроводу (2); и устройство (CT1; CT2) управления, соединенное с блоком (22; 37) управления и выполненное с возможностью регулирования силы, которой обмениваются натяжное устройство (T1; T2) и трубопровод (2), для осуществления регулирования натяжения, прикладываемого к трубопроводу (2) в виде функции сигнала (Е) ошибки.
18. Укладочное судно по п.12, в котором блок (22; 37) управления выполнен с возможностью определения расстояния между трубопроводом (2) и несущей конструкцией (13; 35) на свободном конце спусковой аппарели (6; 34).
19. Укладочное судно по п.12, в котором устройство получения изображений содержит датчик (16), установленный на спусковую аппарель (6; 34), для образования веерообразной зоны обнаружения, проходящей вдоль плоскости регистрации, перпендикулярной оси трубопровода (2); и блок (17) обработки изображений.
20. Укладочное судно по п.19, содержащее ряд устройств (15) получения изображений, установленных на спусковую аппарель (6; 34) для получения изображений различных поверхностей трубопровода (2) в одной и той же плоскости регистрации, перпендикулярной оси трубопровода (2).
21. Укладочное судно по п.19, в котором датчиком (16) является оптический датчик для получения оптических изображений или гидроакустический датчик для получения акустических изображений.
22. Укладочное судно по п.21, в котором устройство (15) получения изображений содержит источник (26) света, в частности выполненный с возможностью излучения лазерного луча, который обследует всю поверхность трубопровода (2) вдоль плоскости регистрации.
| US 6910848 B1, 28.06.2005 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВОЛОКНИСТОГО ПОЛУФАБРИКАТА | 2004 |
|
RU2265685C1 |
| WO 2009098586 A2, 13.08.2009 | |||
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |

