ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Область техники, к которой относится изобретение
Настоящее изобретение относится к приводному инструменту, имеющему динамический виброгаситель.
Описание предшествующего уровня техники
WO 2005-105386 A1 раскрывает электрический отбойный молоток, имеющий секцию динамического виброгашения. Известный электрический отбойный молоток предусмотрен с динамическим виброгасителем для уменьшения вибрации, возникающей в отбойном молотке в осевом направлении молоткового рабочего органа в процессе долбления. Динамический виброгаситель имеет массу, которая может линейно перемещаться в состоянии, при котором упругая смещающая сила цилиндрической винтовой пружины приложена к массе, таким образом, что вибрация отбойного молотка уменьшается в процессе долбления посредством перемещения массы в осевом направлении молоткового рабочего органа.
При проектировании приводного инструмента с вышеописанным динамическим виброгасителем, является желательным обеспечить способ легкой установки динамического виброгасителя и предотвращения увеличения габаритов всего приводного инструмента посредством эффективного использования свободного пространства внутри корпуса инструмента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, целью изобретения является обеспечение приводного инструмента с рациональным размещением динамического виброгасителя внутри корпуса инструмента.
Для того чтобы решить вышеописанную проблему, приводной инструмент в соответствии с настоящим изобретением линейно перемещает рабочий орган инструмента с тем, чтобы побудить рабочий орган инструмента выполнять на заготовке заранее определенную работу, и включает в себя, по меньшей мере, корпус инструмента, приводной электродвигатель, выходной вал электродвигателя, секцию преобразования движения, пневмопружинную камеру, ударный элемент, внутреннее пространство и динамический виброгаситель.
Приводной электродвигатель размещен внутри корпуса инструмента. Выходной вал приводного электродвигателя располагается в осевом направлении рабочего органа инструмента.
Секция преобразования движения включает в себя качающийся элемент и приводной элемент и расположена относительно рабочего органа инструмента со стороны приводного электродвигателя в осевом направлении рабочего органа инструмента. Качающийся элемент побуждается качаться в осевом направлении рабочего органа инструмента посредством вращения выходного вала электродвигателя. Приводной элемент расположен параллельно выходному валу электродвигателя и линейно перемещается в осевом направлении рабочего органа инструмента посредством составляющих качательного движения качающегося элемента в осевом направлении рабочего органа инструмента. Пневмопружинная камера образована внутри приводного элемента. Ударный элемент ударяет рабочий орган инструмента посредством пневмопружинной камеры или благодаря действию пневмопружины в результате поступательного движения приводного элемента.
Внутреннее пространство расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса. Внутренняя граница внутреннего пространства задается внешней границей секции преобразования движения, а внешняя граница внутреннего пространства задается внешней периферией приводного электродвигателя.
Динамический виброгаситель включает в себя массу и упругий элемент, который упруго поддерживает массу относительно корпуса инструмента. Масса, упруго поддерживаемая упругим элементом, линейно перемещается в осевом направлении рабочего органа инструмента против усилия пружины упругого элемента, таким образом вибрация корпуса инструмента во время работы уменьшается. «Поступательное движение массы» в настоящем изобретении не ограничивается поступательным движением в осевом направлении рабочего органа инструмента, а существенным является только то, что поступательное движение имеет, по меньшей мере, составляющие в осевом направлении рабочего органа инструмента. Более того, динамический виброгаситель расположен в вышеописанном внутреннем пространстве.
Здесь, внутреннее пространство расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса. Вероятно, что пространство вокруг секции преобразования движения оказывается свободным, таким образом внутренняя граница внутреннего пространства может быть задана внешней границей секции преобразования движения. Более того, если сам корпус инструмента выполнен таким образом, чтобы вмещать внешнюю периферию электродвигателя, внешняя граница внутреннего пространства может быть задана внешней периферией электродвигателя. Следовательно, с помощью установки динамического виброгасителя во внутреннем пространстве рациональное размещение динамического виброгасителя может быть реализовано без увеличения габаритов корпуса инструмента посредством эффективного использования свободного пространства внутри корпуса инструмента. Более того, «размещение динамического виброгасителя во внутреннем пространстве» может включать в себя способ, при котором динамический виброгаситель расположен во внутреннем пространстве полностью или частично.
В соответствии с предпочтительным вариантом осуществления приводного инструмента в настоящем изобретении, динамический виброгаситель размещен во внутреннем пространстве в месте, расположенном в стороне от линии, соединяющей качающийся элемент и приводной элемент при рассмотрении сечения корпуса инструмента, которое взято в направлении, перпендикулярном к осевому направлению рабочего органа инструмента. С этой конструкцией, во внутреннем пространстве, особенно эффективное пространство, расположенное в стороне от линии, соединяющей качающийся элемент и приводной элемент, может быть использовано для размещения динамического виброгасителя.
В соответствии с дополнительным вариантом осуществления приводного инструмента в настоящем изобретении, упругий элемент выполнен в виде цилиндрической винтовой пружины, которая упруго поддерживает массу. Более того, масса имеет часть для размещения пружин, которая проходит в виде полости в осевом направлении рабочего органа инструмента в, по меньшей мере, одной из передней и задней частей массы и размещает один конец цилиндрической винтовой пружины. С этой конструкцией, длина динамического виброгасителя в осевом направлении рабочего органа инструмента с цилиндрической винтовой пружиной, размещенной и закрепленной в пространстве массы для размещения пружин, может быть уменьшена, таким образом размер динамического виброгасителя в осевом направлении рабочего органа инструмента может быть уменьшен.
Приводной инструмент в соответствии с другим вариантом осуществления настоящего изобретения линейно перемещает рабочий орган инструмента с тем, чтобы побудить рабочий орган инструмента выполнять на заготовке заранее определенную работу, и включает в себя, по меньшей мере, корпус инструмента, приводной электродвигатель, выходной вал электродвигателя, секцию преобразования движения, воздушную пружинную камеру, ударный элемент, секцию передачи мощности, внутреннее пространство и динамический виброгаситель.
Корпус инструмента, приводной электродвигатель, выходной вал электродвигателя, секция преобразования движения, пневмопружинная камера, ударный элемент и динамический виброгаситель в этом приводном инструменте имеют такую же конструкцию, что и вышеописанные корпус инструмента, приводной электродвигатель, выходной вал электродвигателя, секция преобразования движения, пневмопружинная камера, ударный элемент и динамический виброгаситель.
Секция передачи мощности включает в себя крепежный элемент и передаточное зубчатое колесо. Крепежный элемент располагается в осевом направлении рабочего органа инструмента и фиксирует рабочий орган инструмента. Передаточное зубчатое колесо вращает крепежный элемент вокруг его оси и, таким образом, приводит во вращательное движение рабочий орган инструмента, когда вращается выходной вал электродвигателя.
Внутреннее пространство расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса. Внутренняя граница внутреннего пространства задается внешней границей секции преобразования движения или внешней периферией приводного электродвигателя, а внешняя граница внутреннего пространства задается внешней периферией передаточного зубчатого колеса. Динамический виброгаситель расположен в этом внутреннем пространстве.
Здесь, внутреннее пространство расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса. Вероятно, что пространство вокруг секции преобразования движения оказывается свободным, таким образом внутренняя граница внутреннего пространства может быть задана внешней границей секции преобразования движения или внешней периферией приводного электродвигателя. Более того, если верхняя часть корпуса инструмента выполнена таким образом, чтобы вмещать внешнюю периферию передаточного зубчатого колеса, внешняя граница внутреннего пространства может быть задана внешней периферией передаточного зубчатого колеса. Следовательно, с помощью установки динамического виброгасителя во внутреннем пространстве рациональное размещение динамического виброгасителя может быть реализовано без увеличения габаритов корпуса инструмента посредством эффективного использования свободного пространства внутри корпуса инструмента.
В соответствии с дополнительным вариантом осуществления приводного инструмента в настоящем изобретении, динамический виброгаситель размещен во внутреннем пространстве в месте, расположенном в верхней области инструмента над приводным элементом при рассмотрении сечения корпуса инструмента, которое взято в направлении, перпендикулярном к осевому направлению рабочего органа инструмента. С этой конструкцией, во внутреннем пространстве, особенно эффективное пространство, расположенное в верхней области инструмента над приводным элементом, может быть использовано для размещения динамического виброгасителя. Другие цели, элементы и преимущества настоящего изобретения будут легко понятыми после прочтения нижеследующего подробного описания вместе с сопровождающими чертежами и формулой изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - вид сбоку в разрезе, показывающий всю конструкцию молоткового перфоратора 101 в соответствии с первым вариантом осуществления.
Фиг.2 - часть вида сбоку в разрезе с другой плоскостью сечения молоткового перфоратора 101, показанного на фиг.1.
Фиг.3 - разрез молоткового перфоратора 101, взятый по линии A-A на фиг.2.
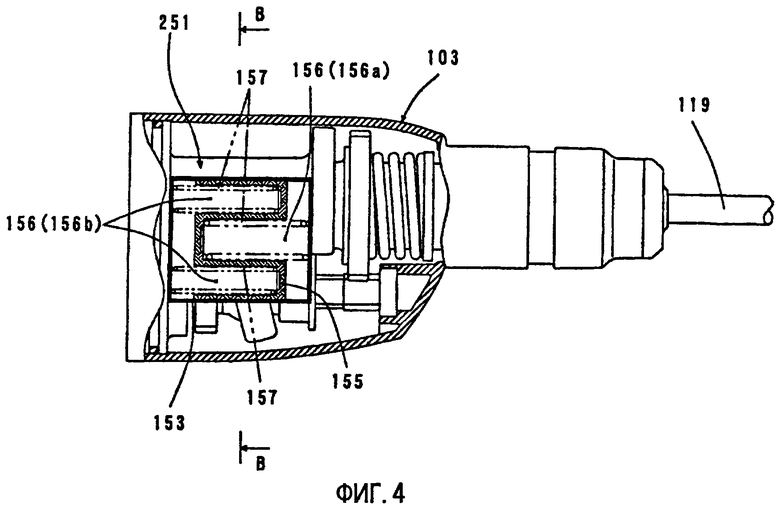
Фиг.4 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии со вторым вариантом осуществления.
Фиг.5 - разрез молоткового перфоратора 101, взятый по линии B-B на фиг.4.
Фиг.6 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с третьим вариантом осуществления.
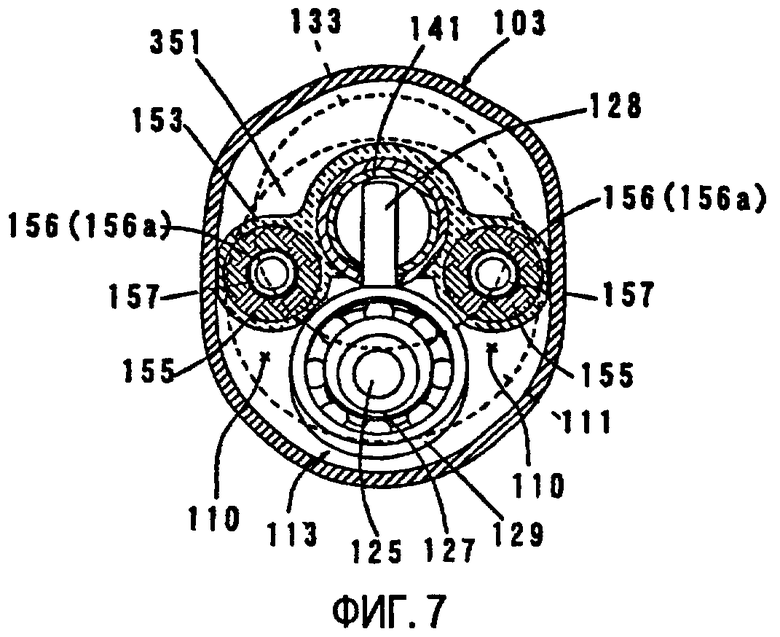
Фиг.7 - разрез молоткового перфоратора 101, взятый по линии C-C на фиг.6.
Фиг.8 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с четвертым вариантом осуществления.
Фиг.9 - разрез молоткового перфоратора 101, взятый по линии D-D на фиг.8.
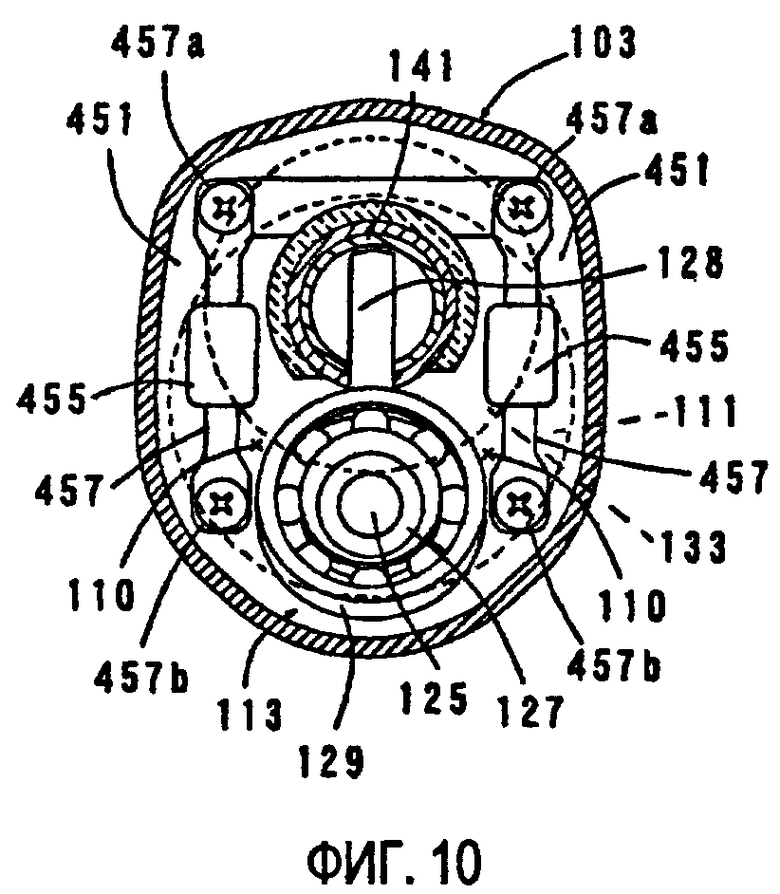
На фиг.10 показана конструкция в разрезе, аналогичная конструкции, показанной на фиг.9.
Фиг.11 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с пятым вариантом осуществления.
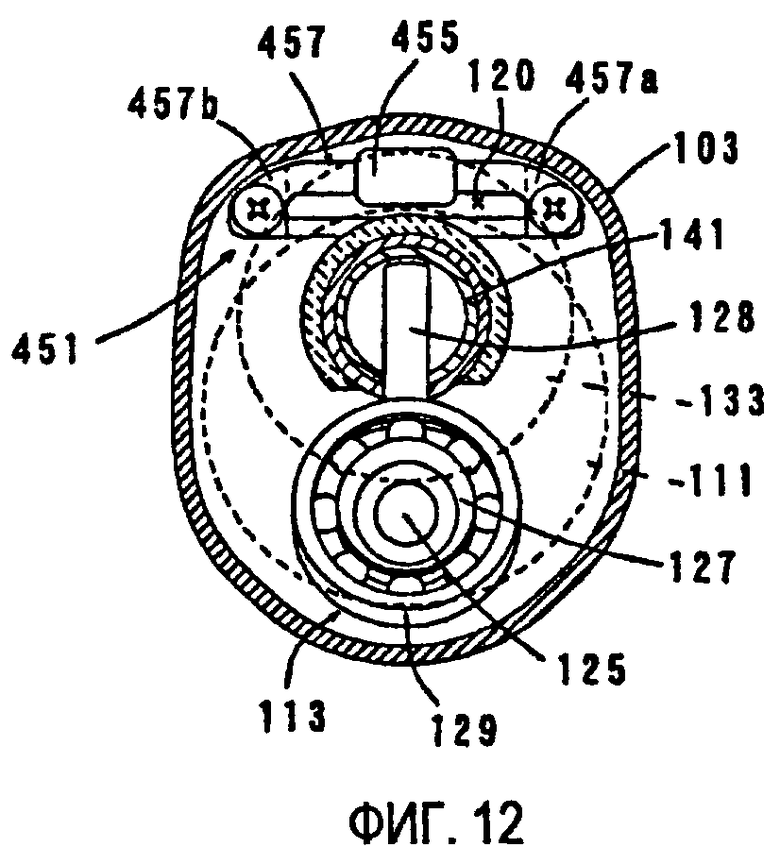
Фиг.12 - разрез молоткового перфоратора 101, взятый по линии E-E на фиг.11.
Фиг.13 - вид сбоку в разрезе, показывающий всю конструкцию молоткового перфоратора 201 в соответствии с другим вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Каждый из дополнительных элементов и этапов способа, раскрытых выше и ниже, может быть использован отдельно или в сочетании с другими элементами и этапами способа для обеспечения и изготовления усовершенствованных приводных инструментов и способа применения таких приводных инструментов и устройств, использующихся в них. Характерные примеры настоящего изобретения использовали в сочетании многие из этих дополнительных элементов и этапов способа, теперь будут подробно описаны со ссылкой на чертежи. Настоящее подробное описание предназначено только для разъяснения специалисту в данной области дополнительных подробностей осуществления предпочтительных аспектов идей настоящего изобретения и не предназначено для ограничения объема изобретения. Только формула изобретения определяет объем изобретения, описанного в заявке. Следовательно, сочетания элементов и этапов, раскрытых в нижеследующем подробном описании, могут являться необязательными для осуществления изобретения в самом широком смысле, а вместо того показаны только для конкретного описания некоторых характерных примеров изобретения, подробное описание которого теперь будет дано со ссылкой на сопровождающие чертежи.
Характерный вариант осуществления «приводного инструмента» в соответствии с настоящим изобретением теперь описывается со ссылкой на чертежи. В этом варианте осуществления, электрический молотковый перфоратор объясняется в качестве характерного примера приводного инструмента.
Первый вариант осуществления
Первый вариант осуществления приводного инструмента в соответствии с настоящим изобретением теперь описывается со ссылкой на фиг.1-3. Фиг.1 - вид сбоку в разрезе, показывающий всю конструкцию молоткового перфоратора 101 в соответствии с первым вариантом осуществления. Фиг.2 - часть вида сбоку в разрезе с другой плоскостью сечения молоткового перфоратора 101, показанного на фиг.1. Фиг.3 - разрез молоткового перфоратора 101, взятый по линии A-A на фиг.2.
Как показано на фиг.1, молотковый перфоратор 101 первого варианта осуществления главным образом включает в себя корпус 103, который образует внешнюю оболочку молоткового перфоратора 101, инструментодержатель 137, соединенный с одним концом (правым концом, как видно на фиг.1) корпуса 103 в продольном направлении молоткового перфоратора 101, и молотковый рабочий орган 119, разъемно соединенный с инструментодержателем 137. Молотковый рабочий орган 119 закрепляется инструментодержателем 137 таким образом, что он имеет возможность совершать возвратно-поступательное движение относительно инструментодержателя в его осевом направлении (в продольном направлении корпуса 103) и предохраняется от вращения относительно инструментодержателя в его окружном направлении. Корпус 103 и молотковый рабочий орган 119 представляют собой элементы, которые надлежащим образом соответствуют «корпусу инструмента» и «рабочему органу инструмента» в соответствии с настоящим изобретением.
Корпус 103 включает в себя корпус 105 электродвигателя, который размещает приводной электродвигатель 111, корпус 107 зубчатых передач, который размещает секцию 113 преобразования движения и секцию 114 передачи мощности, цилиндрическую часть 117, которая размещает ударный механизм 115, и рукоятку 109, предназначенную для держания пользователем и соединенную с другим концом (левым концом, как видно на фиг.1) корпуса 103 в продольном направлении молоткового перфоратора 101. В настоящем варианте осуществления, с целью удобства объяснения часть с молотковым рабочим органом 119 взята в качестве передней стороны или передней части инструмента, а часть с рукояткой 109 - в качестве задней стороны или задней части инструмента.
Секция 113 преобразования движения служит для преобразования надлежащим образом вращательного движения приводного электродвигателя 111 в поступательное движение и затем его передачи на ударный механизм 115. Затем, ударная сила (ударяющая нагрузка) создается в осевом направлении молоткового рабочего органа 119 посредством ударного механизма 115. Секция 113 преобразования движения представляет собой элемент, который соответствует «секции преобразования движения» в соответствии с настоящим изобретением. Секция 113 преобразования движения главным образом включает в себя ведущее зубчатое колесо 121, ведомое зубчатое колесо 123, вращающийся элемент 127, качающееся кольцо 129 и цилиндр 141.
Ведущее зубчатое колесо 121 соединено с выходным валом 111a приводного электродвигателя 111, который располагается в осевом направлении молоткового рабочего органа 119, и приводится во вращательное движение, когда работает приводной электродвигатель 111. Ведомое зубчатое колесо 123 зацепляется с ведущим зубчатым колесом 121, и ведомый вал 125 соединен с ведомым зубчатым колесом 123. Следовательно, ведомый вал 125 соединен с выходным валом 111a приводного электродвигателя 111 и приводится во вращательное движение. Приводной электродвигатель 111 и выходной вал 111a электродвигателя представляют собой элементы, которые надлежащим образом соответствуют «приводному электродвигателю» и «выходному валу электродвигателя» в соответствии с настоящим изобретением.
Вращающийся элемент 127 вращается вместе с ведомым зубчатым колесом 123 посредством ведомого вала 125. Внешняя периферия вращающегося элемента 127, посаженного на ведомый вал 125, наклонена с заранее установленным углом наклона относительно оси ведомого вала 125. Качающееся кольцо 129 установлено с возможностью вращения на наклонную внешнюю периферию вращающегося элемента 127 с помощью подшипника 126 и побуждается качаться в осевом направлении молоткового рабочего органа 119 посредством вращения вращающегося элемента 127. Качающееся кольцо 129 представляет собой элемент, который соответствует «качающемуся элементу» в соответствии с настоящим изобретением. Более того, качающееся кольцо 129 имеет качающийся стержень 128, проходящий от него вверх (в радиальном направлении), при этом качающийся стержень 128 нежестко соединен с соединяющим элементом 124, предусмотренным на заднем конце цилиндра 141.
Цилиндр 141 побуждается совершать возвратно-поступательное движение посредством качательного движения качающегося кольца 129 и служит в качестве приводного элемента для приведения в действие ударного механизма 115. Воздушная пружинная камера 141a задана внутри цилиндра 141. Цилиндр 141 и пневмопружинная камера 141a представляют собой элементы, которые надлежащим образом соответствуют «приводному элементу» и «воздушной пружинной камере» в соответствии с настоящим изобретением. В этом варианте осуществления, выходной вал 111a приводного электродвигателя 111, ведомый вал 125 и приводной элемент в виде цилиндра 141 установлены параллельно относительно друг друга в осевом направлении молоткового рабочего органа 119. Более того, в этом варианте осуществления, ведомый вал 125 расположен ниже выходного вала 111a приводного электродвигателя 111, а цилиндр 141 расположен выше ведомого вала 125.
Секция 114 передачи мощности служит для уменьшения надлежащим образом скорости вращательного движения приводного электродвигателя 111 и вращения молоткового рабочего органа 119 в его окружном направлении. Секция 114 передачи мощности расположена относительно молоткового рабочего органа 119 со стороны приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Секция 114 передачи мощности представляет собой элемент, который соответствует «секции передачи мощности» в соответствии с настоящим изобретением. Секция 114 передачи мощности главным образом включает в себя первое передаточное зубчатое колесо 131, второе передаточное зубчатое колесо 133 и инструментодержатель 137.
Первое передаточное зубчатое колесо 131 побуждается вращаться в вертикальной плоскости с помощью приводного электродвигателя 111 через посредство ведущего зубчатого колеса 121 и ведомого вала 125. Второе передаточное зубчатое колесо 133 зацепляется с первым передаточным зубчатым колесом 131 и вращает инструментодержатель 137 вокруг его оси, когда вращается ведомый вал 125. Инструментодержатель 137 располагается в осевом направлении молоткового рабочего органа 119 и служит в качестве крепежного элемента для крепления молоткового рабочего органа 119, и он вращается вместе со вторым передаточным зубчатым колесом 133. Второе передаточное зубчатое колесо 133 и инструментодержатель 137 представляют собой элементы, которые надлежащим образом соответствуют «передаточному зубчатому колесу» и «крепежному элементу» в соответствии с настоящим изобретением.
Ударный механизм 115 главным образом включает в себя ударник 143, подвижно размещенный в отверстии цилиндра 141, и промежуточный элемент в виде ударного стержня 145, который подвижно размещен внутри инструментодержателя 137 и служит для передачи кинетической энергии ударника 143 молотковому рабочему органу 119. Ударник 143 выполнен в виде ударного элемента для ударения по молотковому рабочему органу 119 посредством пневмопружинной камеры 141a с помощью поступательного движения цилиндра 141. Ударник 143 представляет собой элемент, который соответствует «ударному элементу» в соответствии с настоящим изобретением.
В таким образом выполненном молотковом перфораторе 101, когда работает приводной электродвигатель 111, ведущее зубчатое колесо 121 побуждается вращаться в вертикальной плоскости благодаря вращательному движению приводного электродвигателя. Затем, вращающийся элемент 127 побуждается вращаться в вертикальной плоскости посредством ведомого зубчатого колеса 123, зацепляющегося с ведущим зубчатым колесом 121, и ведомого вала 125, который, в свою очередь, побуждает качающееся кольцо 129 и качающийся стержень 128 качаться в осевом направлении молоткового рабочего органа 119. Затем, цилиндр 141 побуждается линейно скользить посредством качательного движения качающегося стержня 128. Благодаря действию пнвмопружины внутри пневмопружинной камеры 141a в результате этого скольжения цилиндра 141, ударник 143 линейно перемещается внутри цилиндра 141 со скоростью больше, чем скорость поступательного движения цилиндра 141. При этом, ударник 143 сталкивается с ударным стержнем 145 и передает кинетическую энергию, полученную при столкновении, молотковому рабочему органу 119. Когда первое передаточное зубчатое колесо 131 побуждается вращаться вместе с ведомым валом 125, втулка 135 побуждается вращаться в вертикальной плоскости посредством второго передаточного зубчатого колеса 133, которое зацепляется с первым передаточным зубчатым колесом 131, которая, в свою очередь, побуждает вращаться инструментодержатель 137 и молотковый рабочий орган 119, удерживаемый инструментодержателем 137, в окружном направлении вместе с втулкой 135. Таким образом, молотковый рабочий орган 119 осуществляет ударяющее движение в осевом направлении и движение сверления в окружном направлении, таким образом на заготовке осуществляется процесс бурения.
В молотковом перфораторе 101 этого варианта осуществления, динамический виброгаситель 151 предусмотрен для уменьшения внезапной и циклической вибрации, возникающей в корпусе 103, когда молотковый рабочий орган 119 работает, как описано выше. Как показано на фиг.2 и 3, динамический виброгаситель 151 главным образом включает в себя корпус 153 динамического виброгасителя, массу 155 для уменьшения вибрации и цилиндрические винтовые пружины 157, расположенные на массе 155 со стороны передней и задней частей инструмента и проходящие в осевом направлении молоткового рабочего органа 119. Динамический виброгаситель 151 представляет собой элемент, который соответствует «динамическому виброгасителю» в соответствии с этим вариантом осуществления.
Корпус 153 динамического виброгасителя имеет корпусное пространство для размещения массы 155 и цилиндрических винтовых пружин 157 и предусмотрен в качестве цилиндрического направляющего элемента для направления массы 155 с тем, чтобы обеспечить устойчивое скольжение. Корпус 153 динамического виброгасителя жестко соединен с корпусом 103.
Масса 155 выполнена в виде элемента массы, который подвижно размещен внутри корпусного пространства корпуса 153 динамического виброгасителя таким образом, чтобы перемещаться в продольном направлении корпусного пространства (в осевом направлении молоткового рабочего органа 119). Масса 155 представляет собой элемент, который соответствует «массе» в соответствии с этим вариантом осуществления. Масса 155 имеет пространства 156 для размещения пружин, имеющие круглое поперечное сечение и проходящие в виде полости в осевом направлении молоткового рабочего органа 119 на заранее заданное расстояние в передней и задней частях массы 155. Один конец каждой из цилиндрических винтовых пружин 157 размещен во взаимодействующем пространстве 156 для размещения пружин. Пространство 156 для размещения пружин представляет собой элемент, который соответствует «элементу для размещения пружин» в соответствии с этим вариантом осуществления. В этом варианте осуществления, как показано на фиг.2 и 3, четыре пространства 156 для размещения пружин расположены в вертикальном направлении перпендикулярно к осевому направлению молоткового рабочего органа 119. Два из четырех пространств 156 для размещения пружин, которые выполнены в передней части массы 155 (правая область массы 155, как видно на фиг.2), называются первыми пространствами 156a для размещения пружин, а другие два в задней части массы 155 (левая область массы 155, как видно на фиг.2) называются вторыми пространствами 156b для размещения пружин. Первые пространства 156a для размещения пружин размещают цилиндрические винтовые пружины 157, расположенные спереди массы 155, а вторые пространства 156b для размещения пружин размещают цилиндрические винтовые пружины 157, расположенные сзади массы 155.
Цилиндрические винтовые пружины 157 выполнены в виде упругих элементов, которые поддерживают массу 155 относительно корпуса 153 динамического виброгасителя или корпуса 103 таким образом, что цилиндрические винтовые пружины 157 прилагают соответствующие усилия пружин к массе 155 по направлению друг к другу, когда масса 155 перемещается внутри корпусного пространства корпуса 153 динамического виброгасителя в продольном направлении (в осевом направлении молоткового рабочего органа 119). Более того, предпочтительно цилиндрические винтовые пружины 157, размещенные в первых пространствах 156a для размещения пружин, и цилиндрические винтовые пружины 157, размещенные во вторых пространствах 156b для размещения пружин, имеют одинаковую жесткость пружины. Цилиндрическая винтовая пружина 157 представляет собой элемент, который соответствует «упругому элементу» и «цилиндрической винтовой пружине» в соответствии с этим вариантом осуществления.
При этом, для каждой из передних цилиндрических винтовых пружин 157, размещенных в первых пространствах 156a для размещения пружин, передний конец 157a пружины прикреплен к крепежному элементу 158 для переднего конца пружины в виде передней стенки корпуса 153 динамического виброгасителя, а задний конец 157b пружины прикреплен к крепежному элементу 159 для заднего конца пружины в виде дна (конца) первых пространств 156a для размещения пружин. Для каждой из задних цилиндрических винтовых пружин 157, размещенных во вторых пространствах 156b для размещения пружин, передний конец 157a пружины прикреплен к крепежному элементу 158 для переднего конца пружины в виде дна (конца) вторых пространств 156b для размещения пружин, а задний конец 157b пружины прикреплен к крепежному элементу 159 для заднего конца пружины в виде задней стенки корпуса 153 динамического виброгасителя. Таким образом, передние и задние цилиндрические винтовые пружины 157 прилагают соответствующие упругие смещающие силы к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119. А именно, масса 155 может перемещаться в осевом направлении молоткового рабочего органа 119 в состоянии, при котором упругие смещающие силы передних и задних цилиндрических винтовых пружин 157 приложены к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119.
Масса 155 и цилиндрические винтовые пружины 157 служат в качестве виброгасящих элементов в динамическом виброгасителе 151 на корпусе 103 и взаимодействуют для пассивного уменьшения вибрации корпуса 103 во время работы молоткового перфоратора 101. Таким образом, вибрация корпуса 103 молоткового перфоратора 101 может быть ослаблена или уменьшена во время работы. В частности, в этом динамическом виброгасителе 151, как описано выше, пространства 156 для размещения пружин выполнены внутри массы 155, и один конец каждой из цилиндрических винтовых пружин 157 размещен внутри пространства 156 для размещения пружин. Следовательно, длина динамического виброгасителя 151 в осевом направлении молоткового рабочего органа 119 с цилиндрическими винтовыми пружинами 157, размещенными и закрепленными в пространствах 156 массы 155 для размещения пружин, может быть уменьшена, таким образом размер динамического виброгасителя 151 в осевом направлении молоткового рабочего органа 119 может быть уменьшен.
Более того, в этом варианте осуществления, как показано на фиг.2, первые и вторые пространства 156a, 156b для размещения пружин пространств 156 для размещения пружин, выполненных в массе 155, расположены таким образом, что они накладываются друг на друга. Следовательно, цилиндрические винтовые пружины 157, размещенные в первых пространствах 156a для размещения пружин, и цилиндрические винтовые пружины 157, размещенные во вторых пространствах 156b для размещения пружин, расположены таким образом, что они накладываются друг на друга в направлении, перпендикулярном к направлению расположения цилиндрических винтовых пружин. С этой конструкцией, длина массы 155 в продольном направлении с цилиндрическими винтовыми пружинами 157, закрепленными в пространствах 156 (156a, 156b) для размещения пружин, может быть дополнительно уменьшена. Следовательно, эта конструкция является эффективной с точки зрения дополнительного уменьшения размера динамического виброгасителя 151 в его продольном направлении и уменьшения его массы благодаря более простой конструкции. Таким образом, эта конструкция является особенно эффективной, когда пространство для установки динамического виброгасителя 151 в корпусе 103 ограничено в продольном направлении корпуса 103. Более того, цилиндрические винтовые пружины могут быть дополнительно увеличены в размерах степенью наложения между цилиндрическими винтовыми пружинами 157, размещенными в первых пространствах 156a для размещения пружин, и цилиндрическими винтовыми пружинами 157, размещенными во вторых пространствах 156b для размещения пружин, при условии, что используется динамический виброгаситель 151, имеющий такую же длину в продольном направлении. В этом случае, динамический виброгаситель 151 может стабильно обеспечить более хороший эффект уменьшения вибрации с помощью увеличенных в размерах, цилиндрических винтовых пружин. Вышеупомянутые эффекты динамического виброгасителя 151 также могут быть получены посредством динамических виброгасителей 251, 351, 551-554, которые будут описаны ниже.
При проектировании молоткового перфоратора 101, в котором динамический виброгаситель 151, эффективный в уменьшении вибрации, устанавливается в корпусе 103, является желательным обеспечить способ установки динамического виброгасителя 151 без труда и предотвращения увеличения габаритов корпуса 103 и, таким образом, габаритов всего молоткового перфоратора 101 посредством эффективного использования свободного пространства внутри корпуса 103. Поэтому, изобретатели провели глубокие исследования на тему рационального размещения динамического виброгасителя 151 внутри корпуса 103. В качестве результата исследований, пример рационального размещения динамического виброгасителя 151 показан на фиг.3.
При размещении, показанном на фиг.3, динамический виброгаситель 151 размещен в левой области (с левой стороны, как видно на фиг.3) внутри корпуса 103, когда корпус 103 рассматривается со стороны передней части инструмента (справа, как видно на фиг.2). Конкретно, как показано на фиг.3, динамический виброгаситель 151, имеющий вышеописанную конструкцию, расположен во внутреннем пространстве 110 в секции 113 преобразования движения рядом с приводным электродвигателем 111 внутри корпуса 103. Внутренняя граница внутреннего пространства 110 задается внешней границей (внешней периферией) секции 113 преобразования движения, а внешняя граница внутреннего пространства 110 задается внешней периферией (показанной на фиг.3 с помощью пунктирной линии) приводного электродвигателя 111. Другими словами, внутреннее пространство 110 предусмотрено с одной стороны секции 113 преобразования движения и задано в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Внутреннее пространство 110 представляет собой элемент, который соответствует «внутреннему пространству» в соответствии с этим вариантом осуществления. Более того, «размещение динамического виброгасителя 151 во внутреннем пространстве» в настоящем описании изобретения в широком смысле включает в себя способ, при котором динамический виброгаситель 151 расположен во внутреннем пространстве полностью или частично.
В пространстве внутри корпуса 103, вероятно, что пространство вокруг секции 113 преобразования движения оказывается свободным, таким образом внутренняя граница внутреннего пространства 110 может быть задана внешней границей секции 113 преобразования движения. Более того, если сам корпус 103 выполнен таким образом, чтобы вмещать внешнюю периферию электродвигателя 111, внешняя граница внутреннего пространства 110 может быть задана внешней периферией электродвигателя 111. Следовательно, с помощью установки динамического виброгасителя 151 во внутреннем пространстве 110 рациональное размещение динамического виброгасителя 151 может быть реализовано без увеличения габаритов корпуса 103 посредством эффективного использования свободного пространства внутри корпуса 103.
Конкретно в этом варианте осуществления, динамический виброгаситель 151 размещен во внутреннем пространстве 110 в месте, расположенном вбок с одной стороны линии, соединяющей качающееся кольцо 129 и приводной элемент в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято вдоль направления, перпендикулярного к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 110, может быть использовано особенно эффективное пространство для размещения динамического виброгасителя 151. Эта конструкция может быть осуществлена посредством соответствующего изменения размещения составных частей секции 113 преобразования движения таким образом, что внутреннее пространство для динамического виброгасителя 151 может быть обеспечено, например, в месте, расположенном вбок с одной стороны линии, соединяющей качающееся кольцо 129 и цилиндр 141.
Второй вариант осуществления
Второй вариант осуществления приводного инструмента в соответствии с настоящим изобретением теперь описывается со ссылкой на фиг.4 и 5. Второй вариант осуществления представляет собой модификацию конструкции динамического виброгасителя 151 первого варианта осуществления, и с других точек зрения он имеет такую же конструкцию, что и вышеописанный первый вариант осуществления. Фиг.4 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии со вторым вариантом осуществления, и фиг.5 - разрез молоткового перфоратора 101, взятый по линии B-B на фиг.4. На фиг.4 и 5 составные части или элементы, которые, по существу, являются идентичными показанным на фиг.1-3, показаны с помощью аналогичных цифр.
Как показано на фиг.4 и 5, динамический виброгаситель 251 в соответствии со вторым вариантом осуществления представляет собой один вариант осуществления «динамического виброгасителя» в соответствии с настоящим изобретением. Динамический виброгаситель 251 размещен в левой области (с левой стороны, как видно на фиг.5) внутри корпуса 103, когда корпус 103 рассматривается со стороны передней части инструмента (справа, как видно на фиг.4). В частности, динамический виброгаситель 251 размещен посредством использования внутреннего пространства 110, описанного выше в первом варианте осуществления. Конкретно, как показано на фиг.5, динамический виброгаситель 251 размещен внутри корпуса 103, в частности, посредством использования внутреннего пространства 110, которое задано секцией 113 преобразования движения и внешней периферией (показанной на фиг.5 с помощью пунктирной линии) приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Другими словами, внутреннее пространство 110 предусмотрено с одной стороны секции 113 преобразования движения и задано в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Конкретно в этом варианте осуществления, динамический виброгаситель 251 размещен во внутреннем пространстве 110 в месте, расположенном вбок с одной стороны линии, соединяющей качающееся кольцо 129 и приводной элемент в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 110, может быть использовано особенно эффективное пространство для размещения динамического виброгасителя 251.
В динамическом виброгасителе 251, три пространства 156 для размещения пружин расположены в вертикальном направлении перпендикулярно к осевому направлению молоткового рабочего органа 119. Два из трех пространств 156 для размещения пружин, которые выполнены в передней части массы 155 (правая область массы 155, как видно на фиг.4), называются первыми пространствами 156a для размещения пружин, а другое одно в задней части массы 155 (левая область массы 155, как видно на фиг.4) называется вторым пространством 156b для размещения пружин. Первые пространства 156a для размещения пружин размещают цилиндрические винтовые пружины 157, расположенные спереди массы 155, а вторые пространства 156b для размещения пружин размещают цилиндрическую винтовую пружину 157, расположенную сзади массы 155. Таким образом, передняя и задние цилиндрические винтовые пружины 157 прилагают соответствующие упругие смещающие силы к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119. Масса 155 может перемещаться в осевом направлении молоткового рабочего органа 119 в состоянии, при котором упругие смещающие силы передней и задних цилиндрических винтовых пружин 157 приложены к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119. Более того, предпочтительно сумма жесткостей двух цилиндрических винтовых пружин 157, размещенных в первых пространствах 156a для размещения пружин, равна жесткости цилиндрической винтовой пружины 157, размещенной во втором пространстве 156b для размещения пружин.
Третий вариант осуществления
Третий вариант осуществления приводного инструмента в соответствии с настоящим изобретением теперь описывается со ссылкой на фиг.6 и 7. Третий вариант осуществления представляет собой модификацию конструкции динамического виброгасителя 151 первого варианта осуществления, и с других точек зрения он имеет такую же конструкцию, что и вышеописанный первый вариант осуществления. Фиг.6 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с третьим вариантом осуществления, и фиг.7 - разрез молоткового перфоратора 101, взятый по линии C-C на фиг.6. На фиг.6 и 7 составные части или элементы, которые, по существу, являются идентичными показанным на фиг.1-3, показаны с помощью аналогичных цифр.
Как показано на фиг.6 и 7, динамический виброгаситель 351 в соответствии с третьим вариантом осуществления представляет собой один вариант осуществления «динамического виброгасителя» в соответствии с настоящим изобретением. Динамический виброгаситель 351 размещен в правой и левой областях (с правой и левой стороны, как видно на фиг.7) внутри корпуса 103. В частности, два динамических виброгасителя 351 размещены посредством использования внутреннего пространства 110, описанного выше в первом варианте осуществления. Два динамических виброгасителя 351 также могут рассматриваться в качестве одного целого динамического виброгасителя 351. Как показано на фиг.7, динамические виброгасители 351 размещены внутри корпуса 103, в частности, посредством использования внутреннего пространства 110, которое задано секцией 113 преобразования движения и внешней периферией (показанной на фиг.7 с помощью пунктирной линии) приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Другими словами, внутреннее пространство 110 предусмотрено с обеих сторон секции 113 преобразования движения и задано в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Конкретно в этом варианте осуществления, динамические виброгасители 351 размещены во внутреннем пространстве 110 в месте, расположенном вбок с обеих сторон линии, соединяющей качающееся кольцо 129 и приводной элемент в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 110, может быть использовано особенно эффективное пространство для размещения динамических виброгасителей 351. Более того, два динамических виброгасителя 351 размещены сбалансированным образом с правой и левой стороны внутри корпуса 103.
В каждом из динамических виброгасителей 351, два пространства 156 для размещения пружин расположены в вертикальном направлении перпендикулярно к осевому направлению молоткового рабочего органа 119. Одно из двух пространств 156 для размещения пружин, которое выполнено в передней части массы 155 (правая область массы 155, как видно на фиг.6), называется первым пространством 156a для размещения пружин, а другое одно в задней части массы 155 (левая область массы 155, как видно на фиг.6) называется вторым пространством 156b для размещения пружин. Первое пространство 156a для размещения пружин размещает цилиндрическую винтовую пружину 157, расположенную спереди массы 155, а второе пространство 156b для размещения пружин размещает цилиндрическую винтовую пружину 157, расположенную сзади массы 155. Таким образом, передняя и задняя цилиндрические винтовые пружины 157 прилагают соответствующие упругие смещающие силы к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119. Масса 155 может перемещаться в осевом направлении молоткового рабочего органа 119 в состоянии, при котором упругие смещающие силы передней и задней цилиндрических винтовых пружин 157 приложены к массе 155 по направлению друг к другу в осевом направлении молоткового рабочего органа 119. Более того, предпочтительно цилиндрическая винтовая пружина 157, размещенная в первом пространстве 156a для размещения пружин, и цилиндрическая винтовая пружина 157, размещенная во втором пространстве 156b для размещения пружин, имеют одинаковую жесткость пружины.
Четвертый вариант осуществления
Четвертый вариант осуществления приводного инструмента в соответствии с настоящим изобретением теперь описывается со ссылкой на фиг.8-10. Четвертый вариант осуществления представляет собой модификацию конструкции динамического виброгасителя 151 первого варианта осуществления, и с других точек зрения он имеет такую же конструкцию, что и вышеописанный первый вариант осуществления. Фиг.8 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с четвертым вариантом осуществления, и фиг.9 - разрез молоткового перфоратора 101, взятый по линии D-D на фиг.8. На фиг.10 показана конструкция в разрезе, аналогичная конструкции, показанной на фиг.9. На фиг.8-10 составные части или элементы, которые, по существу, являются идентичными показанным на фиг.1-3, показаны с помощью аналогичных цифр.
Как показано на фиг.8 и 9, динамический виброгаситель 451 в соответствии с четвертым вариантом осуществления представляет собой один вариант осуществления «динамического виброгасителя» в соответствии с настоящим изобретением. Динамический виброгаситель 451 размещен в левой области (с левой стороны, как видно на фиг.8 внутри корпуса 103, когда корпус 103 рассматривается со стороны передней части инструмента (справа, как видно на фиг.8). В частности, динамический виброгаситель 451 размещен посредством использования внутреннего пространства 110, описанного выше в первом варианте осуществления. Конкретно, как показано на фиг.9, динамический виброгаситель 451 размещен внутри корпуса 103, в частности, посредством использования внутреннего пространства 110, которое задано секцией 113 преобразования движения и внешней периферией (показанной на фиг.9 с помощью пунктирной линии) приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Другими словами, внутреннее пространство 110 предусмотрено с одной стороны секции 113 преобразования движения и задано в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Конкретно в этом варианте осуществления, динамический виброгаситель 451 размещен во внутреннем пространстве 110 в месте, расположенном вбок с одной стороны линии, соединяющей качающееся кольцо 129 и приводной элемент в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 110, может быть использовано особенно эффективное пространство для размещения динамического виброгасителя 451.
Динамический виброгаситель 451 главным образом включает в себя массу 455 и пластинчатую пружину 457. Пружинные концевые части 457a, 457b на обоих концах пластинчатой пружины 457 прикреплены к кронштейну 103a корпуса 103 таким образом, что пластинчатая пружина 457 имеет возможность упруго деформироваться в осевом направлении молоткового рабочего органа 119. Масса 455 жестко закреплена в середине пластинчатой пружины 457. Масса 455 может перемещаться в осевом направлении молоткового рабочего органа 119 в состоянии, при котором упругая смещающая сила пластинчатой пружины 457 приложена к массе 455. Следовательно, масса 455 и пластинчатая пружина 457 служат в качестве виброгасящих элементов в динамическом виброгасителе 451 на корпусе 103 и взаимодействуют для пассивного уменьшения вибрации корпуса 103 во время работы молоткового перфоратора 101. Таким образом, вибрация корпуса 103 молоткового перфоратора 101 может быть ослаблена или уменьшена во время работы. Масса 455 и пластинчатая пружина 457 динамического виброгасителя 451 представляют собой элементы, которые надлежащим образом соответствуют «массе» и «пластинчатой пружине» в соответствии с настоящим изобретением.
Может быть предусмотрено множество динамических виброгасителей, идентичных или схожих с вышеописанным динамическим виброгасителем 451. В примере, показанном на фиг.10, правое и левое внутренние пространства 110 в правой и левой областях (с правой и левой стороны, как видно на фиг.10) внутри корпуса 103 используются для размещения динамических виброгасителей 451 в них. Конкретно, как показано на фиг.10, два динамических виброгасителя 451 размещены внутри корпуса 103 посредством использования внутреннего пространства 110, которое задано секцией 113 преобразования движения и внешней периферией (показанной на фиг.10 с помощью пунктирной линии) приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Другими словами, внутренние пространства 110 предусмотрены с обеих сторон секции 113 преобразования движения и заданы в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 в осевом направлении молоткового рабочего органа 119. Конкретно в этом варианте осуществления, динамические виброгасители 451 размещены во внутреннем пространстве 110 в месте, расположенном вбок с обеих сторон линии, соединяющей качающееся кольцо 129 и приводной элемент в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 110, может быть использовано особенно эффективное пространство для размещения динамических виброгасителей 451. Более того, два динамических виброгасителя 451 размещены сбалансированным образом с правой и левой стороны внутри корпуса 103.
Пятый вариант осуществления
Пятый вариант осуществления приводного инструмента в соответствии с настоящим изобретением теперь описывается со ссылкой на фиг.11 и 12. Пятый вариант осуществления представляет собой модификацию размещения динамического виброгасителя 451 четвертого варианта осуществления, и с других точек зрения он имеет такую же конструкцию, что и вышеописанный четвертый вариант осуществления. Фиг.11 - часть вида сбоку в разрезе молоткового перфоратора 101 в соответствии с пятым вариантом осуществления, и фиг.12 - разрез молоткового перфоратора 101, взятый по линии E-E на фиг.11. На фиг.11 и 12 составные части или элементы, которые, по существу, являются идентичными показанным на фиг.8 и 9, показаны с помощью аналогичных цифр.
Как показано на фиг.11 и 12, в пятом варианте осуществления, динамический виброгаситель 451 размещен в верхней области инструмента (с верхней стороны, как видно на фиг.12) внутри корпуса 103 и располагается в поперечном направлении корпуса 103. В частности, динамический виброгаситель 451 размещен посредством использования второго внутреннего пространства 120, которое задано иначе, чем внутреннее пространство 110, описанное выше в первом варианте осуществления. Динамический виброгаситель 451, имеющий вышеописанную конструкцию, расположен во втором внутреннем пространстве 120. Второе внутреннее пространство 120 представляет собой пространство, расположенное в секции 113 преобразования движения рядом с приводным электродвигателем 111 внутри корпуса 103. Внутренняя граница внутреннего пространства 120 задается внешней границей (внешней периферией) секции 113 преобразования движения или внешней периферией (показанной на фиг.12 с помощью пунктирной линии) приводного электродвигателя 111, а внешняя граница внутреннего пространства 120 задается внешней периферией (показанной на фиг.12 с помощью пунктирной линии) второго передаточного зубчатого колеса 133. Другими словами, внутреннее пространство 120 предусмотрено вокруг секции 113 преобразования движения и задано в виде области, которая совмещается с областью, заданной внешней периферией приводного электродвигателя 111 или внешней периферией второго передаточного зубчатого колеса 133 в осевом направлении молоткового рабочего органа 119. Внутреннее пространство 120 представляет собой элемент, который соответствует «внутреннему пространству» в соответствии с этим вариантом осуществления.
В пространстве внутри корпуса 103, вероятно, что верхняя область инструмента над секцией 113 преобразования движения оказывается свободной, таким образом внутренняя граница внутреннего пространства 120 может быть задана внешней границей секции 113 преобразования движения или внешней периферией второго передаточного зубчатого колеса 133. Более того, если верхняя часть корпуса 103 выполнена таким образом, чтобы вмещать внешнюю периферию второго передаточного зубчатого колеса 133, внешняя граница внутреннего пространства 120 может быть задана внешней периферией второго передаточного зубчатого колеса 133. Следовательно, посредством использования внутреннего пространства 120 для установки динамического виброгасителя 451 рациональное размещение динамического виброгасителя 451 может быть реализовано посредством эффективного использования свободного пространства внутри корпуса 103 без увеличения габаритов корпуса 103.
Как показано на фиг.12, конкретно в этом варианте осуществления, динамический виброгаситель 451 размещен во внутреннем пространстве 120 в месте, расположенном в верхней области инструмента (с верхней стороны, как видно на фиг.12) над приводным элементом в виде цилиндра 141 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Здесь «верхняя область инструмента» типично задается в виде области со стороны цилиндра 141, противоположной качающемуся кольцу 129 при рассмотрении сечения корпуса 103, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. Следовательно, во внутреннем пространстве 120, может быть использовано особенно эффективное пространство для размещения динамического виброгасителя 451. Эта конструкция может быть осуществлена посредством соответствующего изменения размещения составных частей секции 113 преобразования движения таким образом, что внутреннее пространство для динамического виброгасителя 451 может быть обеспечено, например, в месте, расположенном в верхней области инструмента над цилиндром 141.
В вышеприведенных вариантах осуществления динамические виброгасители 151, 251, 351, 451 описаны установленными во внутреннем пространстве 110 или внутреннем пространстве 120 внутри корпуса 103, но может быть выполнено таким образом, что один или более из этих динамических виброгасителей устанавливаются, если необходимо, в месте, отличающемся от внутреннего пространства 110 или 120 внутри корпуса 103. Такая конструкция показана на фиг.13. Фиг.13 - вид сбоку в разрезе, показывающий всю конструкцию молоткового перфоратора 201 в соответствии с другим вариантом осуществления. Составные части или элементы молоткового перфоратора 201, которые, по существу, являются идентичными составным частям или элементам молоткового перфоратора 101, показанным на фиг.1, показаны с помощью аналогичных цифр.
Как показано на фиг.13, в молотковом перфораторе 201, который представляет собой один вариант осуществления «приводного инструмента» в соответствии с настоящим изобретением, динамические виброгасители 551, 552 размещены в верхней и нижней областях инструмента (с верхней и нижней стороны, как видно на фиг.13) и с верхней, и с нижней стороны секции 113 преобразования движения и секции 114 передачи мощности внутри корпуса 103. Более того, в молотковом перфораторе 201, динамические виброгасители 553, 554 размещены в верхней и нижней областях инструмента (с верхней и нижней стороны, как видно на фиг.13) и с верхней, и с нижней стороны приводного электродвигателя 111 внутри корпуса 103. Как и вышеописанные динамические виброгасители 151, 251, 351, динамические виброгасители 551-554 предназначены для пассивного уменьшения вибрации с помощью взаимодействия массы и цилиндрических винтовых пружин. Предпочтительно динамические виброгасители 551-554 размещены в центре в поперечном направлении корпуса таким образом, что соответствующие массы выровнены с центром ведомого вала 125 при рассмотрении сечения корпуса, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. На фиг.13 с целью удобства все из динамических виброгасителей 551-554 показаны предусмотренными внутри корпуса 103, но существенным является предусмотреть, по меньшей мере, один из динамических виброгасителей 551-554 внутри корпуса 103. Один или более из динамических виброгасителей 551-554 могут быть предусмотрены внутри корпуса 103, если необходимо.
В приводном инструменте, таком как молотковый перфоратор 201, верхняя часть корпуса может мешать наблюдению за выполнением работы, если она является выпуклой вверх (с верхней стороны, как видно на фиг.13). Следовательно, является желательным выполнение верхней части корпуса с наименьшей возможной степенью выпуклости вверх. Поэтому, после выполнения верхней части корпуса с наименьшей возможной степенью выпуклости вверх, в частности, динамические виброгасители 551 и 553, которые размещены в верхнем пространстве внутри корпуса 103, предпочтительно расположены с изогнутой формой вдоль поверхности стенки корпуса при рассмотрении сечения корпуса, которое взято в направлении, перпендикулярном к осевому направлению молоткового рабочего органа 119. С другой стороны, нижняя часть корпуса имеет возможность быть выпуклой вниз (с нижней стороны, как видно на фиг.13) до такой степени, чтобы не мешать работе. Таким образом, динамические виброгасители 552 и 554, которые размещены в нижнем пространстве внутри корпуса 103, обладают большей свободой размещения по сравнению с динамическими виброгасителями 551 и 553.
В вышеописанных динамических виброгасителях 151, 251, 351, передняя и задняя части массы имеют углубления для образования пространств для размещения пружин для размещения одного конца цилиндрической винтовой пружины. Однако настоящее изобретение может выполняться, без обеспечения массы пространств для размещения пружин, таким образом, что один конец каждой из цилиндрических винтовых пружин прикреплен к переднему или заднему концу массы. В этом случае, пространства для размещения пружин или крепежные пространства цилиндрических винтовых пружин могут быть предусмотрены на, по меньшей мере, одном из переднего и заднего концов массы, если необходимо.
Более того, в вышеприведенных вариантах осуществления молотковый перфоратор описывается в качестве характерного примера приводного инструмента, но настоящее изобретение также может быть применено для отбойного молотка, который линейно перемещает рабочий орган инструмента для выполнения заранее определенной работы, или для других различных типов приводных инструментов.
ОПИСАНИЕ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
101, 201 - молотковый перфоратор (приводной инструмент)
103 - корпус (корпус инструмента)
103a - кронштейн
105 - корпус электродвигателя
107 - корпус зубчатых передач
109 - рукоятка
110 - внутреннее пространство
111 - приводной электродвигатель
111a - выходной вал электродвигателя
113 - секция преобразования движения
115 - ударный механизм
117 - секция передачи мощности
119 - молотковый рабочий орган (рабочий орган инструмента)
120 - внутреннее пространство
121 - ведущее зубчатое колесо
123 - ведомое зубчатое колесо
124 - соединяющий элемент
125 - ведомый вал
126 - подшипник
127 - вращающийся элемент
128 - качающийся стержень
129 - качающееся кольцо
131 - первое передаточное зубчатое колесо
133 - второе передаточное зубчатое колесо
135 - втулка
137 - инструментодержатель
141 - цилиндр
143 - ударник
145 - ударный стержень
151, 251, 351, 451, 551, 552, 553, 554 - динамический виброгаситель
153 - корпус динамического виброгасителя
155 - масса
156 - пространство для размещения пружин (часть для размещения пружин)
156a - первое пространство для размещения пружин
156b - второе пространство для размещения пружин
157 - цилиндрическая винтовая пружина
157a - передний конец пружины
157b - задний конец пружины
158 - крепежный элемент для переднего конца пружины
159 - крепежный элемент для заднего конца пружины
455 - масса
457 - пластинчатая пружина
457a, 457b - пружинная концевая часть
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2507059C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2011 |
|
RU2577639C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2010 |
|
RU2528570C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2011 |
|
RU2570863C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2008 |
|
RU2477213C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2010 |
|
RU2551743C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2012 |
|
RU2606140C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2510326C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2013 |
|
RU2649489C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2010 |
|
RU2520246C2 |








Изобретение относится к приводным инструментам, а именно к ручным перфораторам. Приводной инструмент содержит рабочий орган, корпус 103, приводной электродвигатель 111, секцию 113 преобразования движения и секцию трансмиссии. Инструмент также содержит динамический виброгаситель 151, который размещен во внутреннем пространстве 110, расположенном в секции 113 преобразования движения рядом с приводным электродвигателем 111 внутри корпуса 103. Внутренняя граница внутреннего пространства задается внешней границей секции 113 преобразования движения, а внешняя граница внутреннего пространства задается внешней периферией приводного электродвигателя 111. Технический результат заключается в уменьшении вибрации инструмента за счет рационального размещения динамического виброгасителя в корпусе инструмента. 2 н. и 3 з.п. ф-лы, 13 ил.
1. Приводной инструмент, содержащий линейно перемещаемый рабочий орган для выполнения на заготовке заранее определенной операции, включающий корпус, приводной электродвигатель, размещенный внутри корпуса, выходной вал приводного электродвигателя, который расположен в осевом направлении рабочего органа, секцию преобразования движения, имеющую качающийся элемент, который качается в осевом направлении рабочего органа посредством вращения выходного вала электродвигателя, и приводной элемент, который расположен параллельно выходному валу электродвигателя и линейно перемещается в осевом направлении рабочего органа посредством составляющих качательного движения качающегося элемента в осевом направлении рабочего органа, при этом секция преобразования движения расположена относительно рабочего органа со стороны приводного электродвигателя в осевом направлении рабочего органа, пневмопружинную камеру, образованную внутри приводного элемента, ударный элемент, который ударяет рабочий орган посредством пневмопружинной камеры с помощью поступательного движения приводного элемента, внутреннее пространство, которое расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса, при этом внутренняя граница внутреннего пространства задается внешней границей секции преобразования движения, а внешняя граница внутреннего пространства задается внешней периферией приводного электродвигателя, и динамический виброгаситель, имеющий груз и упругий элемент, который упруго поддерживает груз относительно корпуса, при этом груз, упруго поддерживаемый упругим элементом, линейно перемещается в осевом направлении рабочего органа против усилия пружины упругого элемента для уменьшения вибрации корпуса, при этом динамический виброгаситель расположен в указанном внутреннем пространстве.
2. Приводной инструмент по п.1, в котором динамический виброгаситель размещен в указанном внутреннем пространстве в месте, расположенном в сторону от линии, соединяющей качающийся элемент и приводной элемент при рассмотрении сечения корпуса в направлении, перпендикулярном к осевому направлению рабочего органа.
3. Приводной инструмент по п.1, в котором упругий элемент содержит цилиндрическую винтовую пружину, которая упруго поддерживает груз, и груз имеет часть для размещения пружин, которая проходит в виде полости в осевом направлении рабочего органа в по меньшей мере одной из передней и задней частей груза и размещает один конец цилиндрической винтовой пружины.
4. Приводной инструмент, содержащий линейно перемещаемый рабочий орган для выполнения на заготовке заранее определенной операции, включающий корпус, приводной электродвигатель, размещенный внутри корпуса, выходной вал приводного электродвигателя, который располагается в осевом направлении рабочего органа, секцию преобразования движения, включающую качающийся элемент, который качается в осевом направлении рабочего органа посредством вращения выходного вала электродвигателя, и приводной элемент, который расположен параллельно выходному валу электродвигателя и линейно перемещается в осевом направлении рабочего органа посредством составляющих качательного движения качающегося элемента в осевом направлении рабочего органа, при этом секция преобразования движения расположена относительно рабочего органа со стороны приводного электродвигателя в осевом направлении рабочего органа, пневмопружинную камеру, образованную внутри приводного элемента, ударный элемент, который ударяет рабочий орган посредством пневмопружинной камеры с помощью поступательного движения приводного элемента, секцию трансмиссии, имеющую крепежный элемент, который располагается в осевом направлении рабочего органа и фиксирует рабочий орган, и передаточное зубчатое колесо, которое вращает крепежный элемент вокруг его оси и, таким образом, приводит во вращательное движение рабочий орган, когда вращается выходной вал электродвигателя, внутреннее пространство, которое расположено в секции преобразования движения рядом с приводным электродвигателем внутри корпуса, при этом внутренняя граница внутреннего пространства задается внешней границей секции преобразования движения или внешней периферией приводного электродвигателя, а внешняя граница внутреннего пространства задается внешней периферией передаточного зубчатого колеса, и динамический виброгаситель, имеющий груз и упругий элемент, который упруго поддерживает груз относительно корпуса, при этом груз, упруго поддерживаемый упругим элементом, линейно перемещается в осевом направлении рабочего органа против усилия пружины упругого элемента для уменьшения вибрации корпуса, при этом динамический виброгаситель расположен в указанном внутреннем пространстве.
5. Приводной инструмент по п.4, в котором динамический виброгаситель размещен в указанном внутреннем пространстве в месте, расположенном в верхней области над приводным элементом при рассмотрении сечения корпуса в направлении, перпендикулярном к осевому направлению рабочего органа.
| WO 2007102449 A1, 13.09.2007 | |||
| DE 102006029363 A1, 03.01.2008 | |||
| БЕЗОПАСНЫЙ БРИТВЕННЫЙ ПРИБОР С НЕСКОЛЬКИМИ ОСЯМИ ВРАЩЕНИЯ ЛЕЗВИЙНОГО БЛОКА | 2008 |
|
RU2433909C1 |
| WO 2005105386 A1, 10.11.2005 | |||
| Отбойный молоток | 1937 |
|
SU59802A1 |

