ОПИСАНИЕ
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству уменьшения вибрации электроинструмента, такого как отбойный молоток и молотковый перфоратор, который выполнен с возможностью линейного перемещения наконечника инструмента.
Уровень техники
В японской не рассмотренной выложенной заявке № 2004-154903 описан электрический отбойный молоток с механизмом уменьшения вибрации. Известный электрический отбойный молоток имеет средство уменьшения динамической вибрации в качестве средства для уменьшения вибрации, вызываемой в осевом направлении наконечником молотка во время ударной операции. Средство уменьшения динамической вибрации имеет груз, выполненный с возможностью линейного перемещения под действием смещающего усилия упругого элемента, причем средство уменьшения динамической вибрации выполнено с возможностью уменьшения вибрации молотка во время ударной операции посредством перемещения груза в осевом направлении наконечника инструмента.
В известном средстве уменьшения динамической вибрации груз имеет удлиненную форму с участком большого диаметра и участком малого диаметра, интегрально соединенные друг с другом. Кроме того, на внешней периферии малого участка расположена цилиндрическая пружина. В такой конструкции перемещение груза в осевом направлении наконечника инструмента может стабилизироваться при подержании массы груза.
Для выполнения отбойного молотка с низкой вибрацией, эффективным является улучшение показателей средства уменьшения динамической вибрации, или увеличение мощности уменьшения вибрации (мощности, действующей в направлении, противоположном направлению вибрации) средства уменьшения динамической вибрации. Однако в известном средстве уменьшения динамической вибрации, на внешней периферии груза расположена цилиндрическая пружина, имеющая меньшую плотность, чем груз, (вследствие существования осевых полостей между расположенными рядом цилиндрическими частями). Таким образом, для обеспечения массы груза он имеет низкую эффективность использования объема. Если увеличить массу груза для улучшения уменьшения показателей вибрации, увеличится размер средства уменьшения динамической вибрации, и, следовательно, потребуется больший объем для установки в электроинструменте.
Сущность изобретения
Соответственно, задачей изобретения является создание устройства, способствующего улучшению уменьшения показателей динамической вибрации средства уменьшения динамической вибрации в электроинструменте с уменьшением размера средства уменьшения динамической вибрации.
Выше описанная проблема может быть решена с помощью заявленного изобретения. Представленный электроинструмент выполнен с возможностью линейного перемещения наконечника инструмента для выполнения заданных операций на заготовке. Электроинструмент содержит корпус инструмента и средство уменьшения динамической вибрации. Электроинструмент, согласно настоящему изобретению может представлять собой электроинструмент, такой, как отбойный молоток, молотковый перфоратор, механическая ножовка, сабельная пила, которые выполняют операции на заготовке посредством линейного перемещения наконечника инструмента. Средство уменьшения динамической вибрации включает в себя груз, выполненный с возможностью линейного перемещения в осевом направлении наконечника инструмента. Груз установлен на корпусе инструмента непосредственно или посредством бокового элемента корпуса. Кроме того, средство уменьшения динамической вибрации включает в себя упругий элемент, упруго поддерживающий груз на корпусе инструмента непосредственно или посредством бокового элемента корпуса. Средство уменьшения динамической вибрации служит для уменьшения вибрации корпуса инструмента во время ударной операции посредством линейного перемещения груза, в осевом направлении наконечника инструмента. Более того, груз имеет внутреннюю полость, проходящую в осевом направлении наконечника инструмента от, по меньшей мере, одного конца груза в осевом направлении. Один конец упругого элемента в осевом направлении наконечника инструмента вставлен и размещен во внутренней полости, тогда, как другой конец расположен на корпусе инструмента или боковом элементе корпуса.
Согласно изобретению, при конструкции, в которой внутренняя полость выполнена в грузе и проходит в осевом направлении наконечника инструмента, а упругий элемент вставлен и размещен во внутренней полости, груз может располагаться на внешней периферийной стороне упругого элемента. В результате, по сравнению с конструкцией, в которой упругий элемент расположен на внешней периферийной стороне груза, масса груза может увеличиться. Таким образом, показатели уменьшения вибрации средства уменьшения динамической вибрации могут улучшаться. Кроме того, при конструкции, в которой упругий элемент расположен во внутренней полости груза, если упругий элемент содержит цилиндрическую пружину, диаметр цилиндрической пружины может уменьшаться. С уменьшением диаметра пружины создается меньшее напряжение, так что может быть предусмотрена цилиндрическая пружина большей жесткости при сохранении долговечности. В результате, показатели уменьшения вибрации средства уменьшения динамической вибрации могут дополнительно улучшаться.
Кроме того, перекрытие между грузом и упругим элементом в осевом направлении наконечника инструмента может выполняться большим, вследствие того, что один конец упругого элемента вставлен и размещен во внутренней полости груза. Таким образом, длина в осевом направлении средства уменьшения динамической вибрации в целом может уменьшаться, а следовательно, может уменьшаться его размер.
Согласно дополнительному варианту осуществления настоящего изобретения, груз может включать в себя первую часть и вторую часть, соответственно, проходящие в осевом направлении наконечника инструмента, соединительную часть, соединяющую вторую часть с первой частью и пространство, окруженное первой частью и второй частью и соединительной частью. Пространство образует внутреннюю полость. Кроме того, первая часть и вторая часть могут быть выполнены отдельными деталями. Согласно такой конструкции, первая часть и вторая часть могут выполняться отдельно для упрощения операции изготовления груза.
Согласно дополнительному варианту осуществления настоящего изобретения первая часть и вторая часть выполнены из разных материалов.
Согласно дополнительному варианту осуществления настоящего изобретения груз может предпочтительно иметь первую внутреннюю полость, проходящую от одного конца к другому концу груза в осевом направлении наконечника инструмента и вторую внутреннюю полость, проходящую от другого конца к одному концу в осевом направлении наконечника инструмента. Кроме того, первая внутренняя полость и вторая внутренняя полость могут быть расположены так, что перекрывают друг друга, если смотреть в направлении, перпендикулярном направлению, в котором они проходят. Согласно такой конструкции, средство уменьшения динамической вибрации может быть дополнительно уменьшено в размере в осевом направлении наконечника инструмента. В результате, эта конструкция оказывается эффективной, когда пространство установки средства уменьшения динамической вибрации в корпусе инструмента ограничено в продольном направлении корпуса.
Согласно дополнительному варианту осуществления настоящего изобретения электроинструмент может предпочтительно дополнительно включать в себя приводной электродвигатель, расположенный на оси наконечника инструмента в корпусе инструмента так, что его ось вращения пересекается с осью наконечника инструмента, и часть приводного механизма, расположенную в корпусе инструмента, и служащую для преобразования выходной мощности вращения на выходе приводного электродвигателя в линейное движение и приведения в действие наконечника инструмента, по меньшей мере, линейно в осевом направлении. Кроме того, средство уменьшения динамической вибрации и часть приводного механизма могут быть расположены друг напротив друга на противоположных сторонах оси наконечника инструмента. При такой конструкции может образоваться свободное пространство с нижней стороны от оси наконечника инструмента в корпусе инструмента и средство уменьшения динамической вибрации может располагаться с использованием этого свободного пространства. В результате, средство уменьшения динамической вибрации может располагаться ближе к оси наконечника инструмента так, что может обеспечиваться рациональная конструкция. Более того, посредством расположения средства уменьшения динамической вибрации и части приводного механизма на противоположных сторонах оси наконечника инструмента, может легко достигаться равновесие электроинструмента в вертикальной плоскости.
Согласно дополнительному варианту осуществления настоящего изобретения упругий элемент может содержать цилиндрические пружины, имеющие различные диаметры, соответственно и/или концентрично расположенные радиально внутри и снаружи во внутренней полости груза. Таким образом, при такой конструкции, длина цилиндрических пружин может уменьшаться по сравнению с конструкцией, в которой расположена одна цилиндрическая пружина.
Согласно дополнительному варианту осуществления настоящего изобретения груз может иметь, по меньшей мере, три внутренних полости, расположенные на одной плоскости. При такой конструкции точки воздействия упругих элементов находятся на одной плоскости. Следовательно, такая конструкция является эффективной для предотвращения ненужной вибрации, вызываемой в самом средстве уменьшения динамической вибрации дисбалансом в двух плоскостях.
Согласно изобретению предложено устройство, способствующее улучшению уменьшения показателей вибрации средства уменьшения динамической вибрации в электроинструменте с обеспечением, при этом уменьшения размера средства уменьшения динамической вибрации. Другие задачи, признаки и преимущества настоящего изобретения станут понятными после прочтения следующего подробного описания совместно с прилагаемыми чертежами и формулой изобретения.
Краткое описание чертежей
На Фиг.1 схематично показан общий вид в разрезе молоткового перфоратора, согласно первому варианту осуществления настоящего изобретения.
На Фиг.2 показан вид сверху в разрезе основной части молоткового перфоратора.
На Фиг.3 показан вид в разрезе средства уменьшения динамической вибрации.
На Фиг.4 показан вид в разрезе средства уменьшения динамической вибрации, согласно второму варианту осуществления настоящего изобретения.
На Фиг.5 показан вид в разрезе средства уменьшения динамической вибрации, согласно третьему варианту осуществления настоящего изобретения.
На Фиг.6 показан вид спереди средства уменьшения динамической вибрации, согласно четвертому варианту осуществления настоящего изобретения.
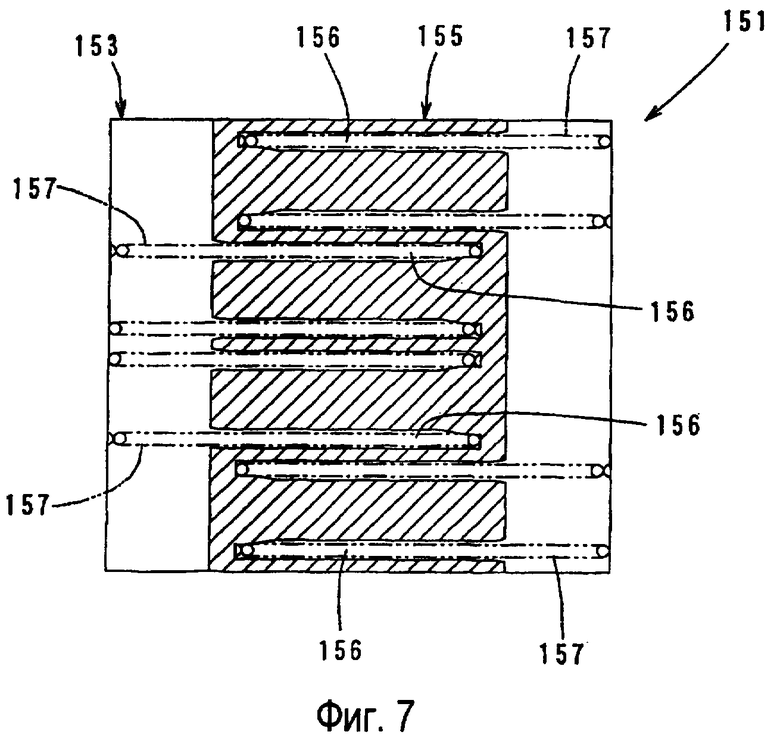
На Фиг.7 показан вид в разрезе по линии А-А, показанной на Фиг.6.
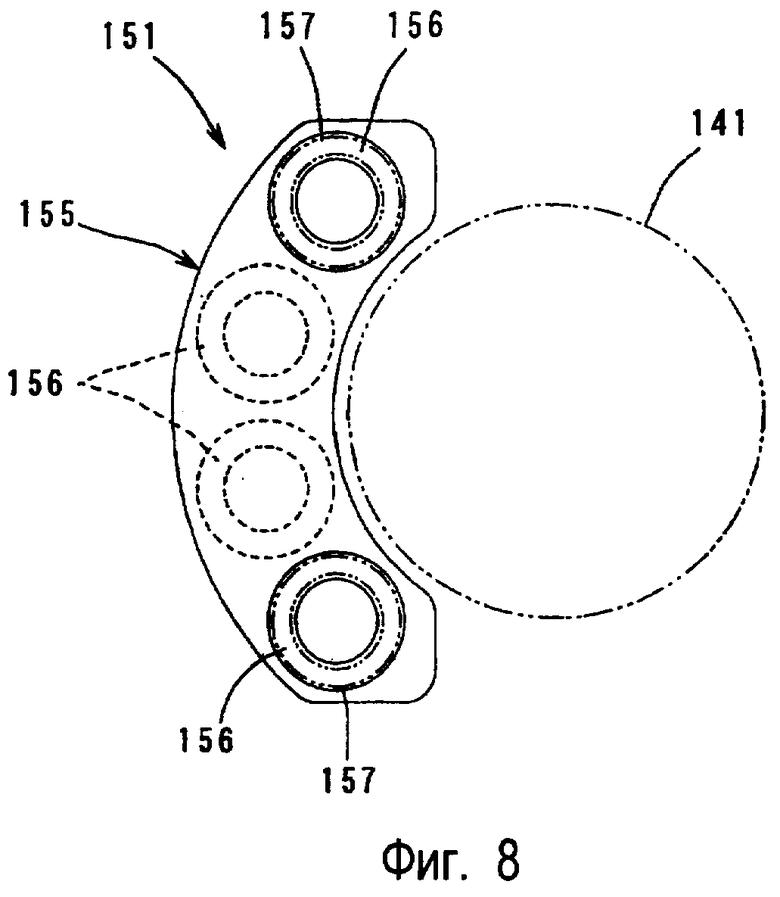
На Фиг.8 показан вид спереди и расположение средства уменьшения динамической вибрации, согласно пятому варианту осуществления настоящего изобретения.
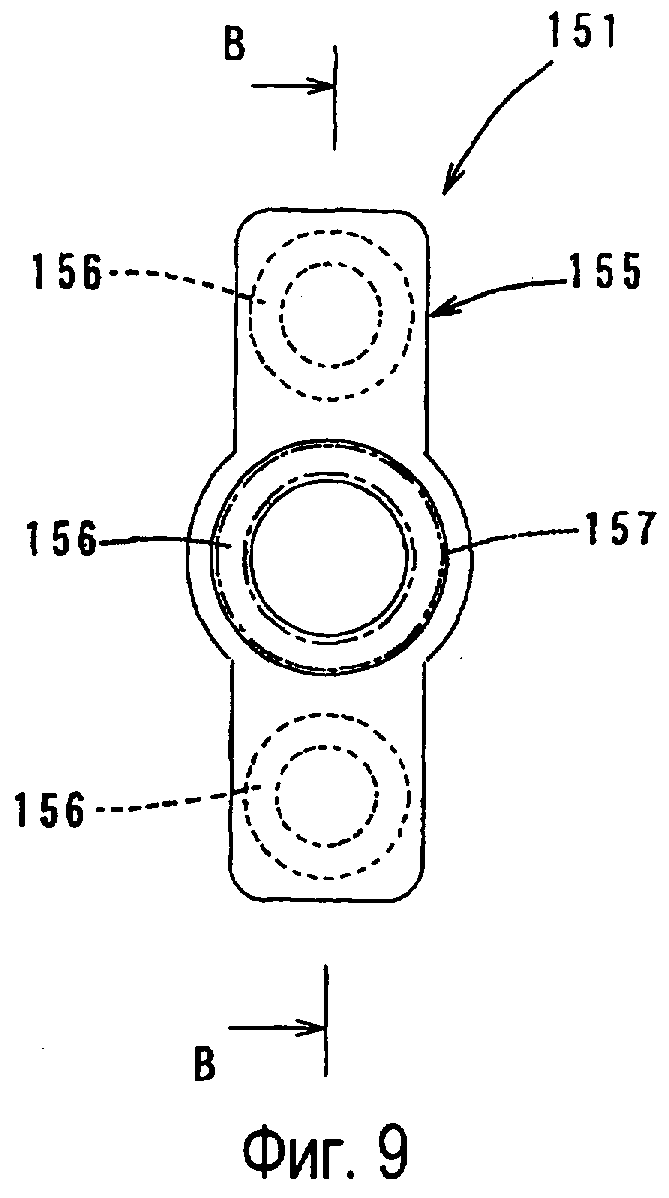
На Фиг.9 показан вид спереди средства уменьшения динамической вибрации, согласно шестому варианту осуществления настоящего изобретения.
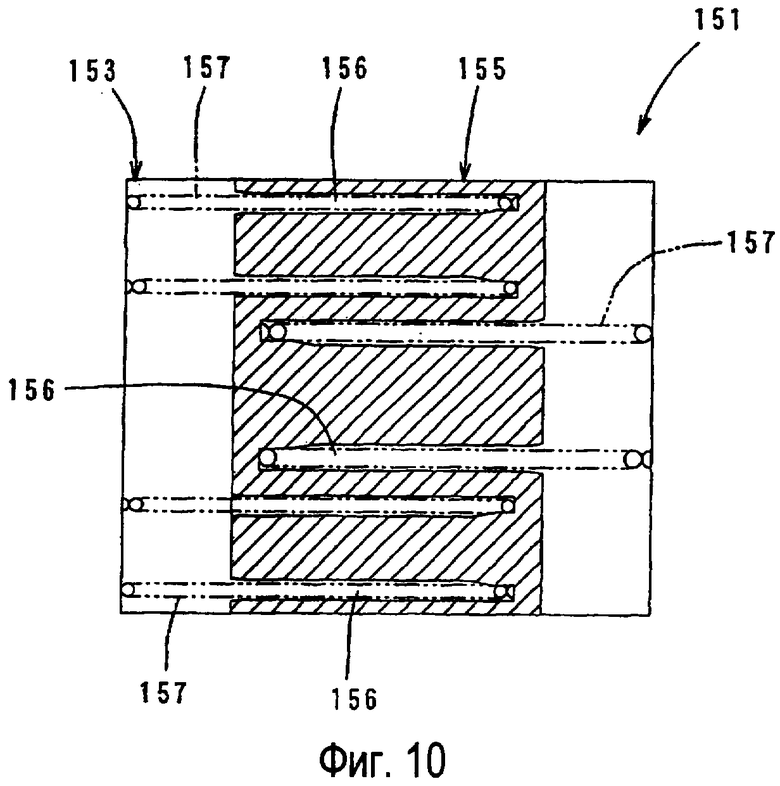
На Фиг.10 показан вид в разрезе по линии В-В, показанной на Фиг.9.
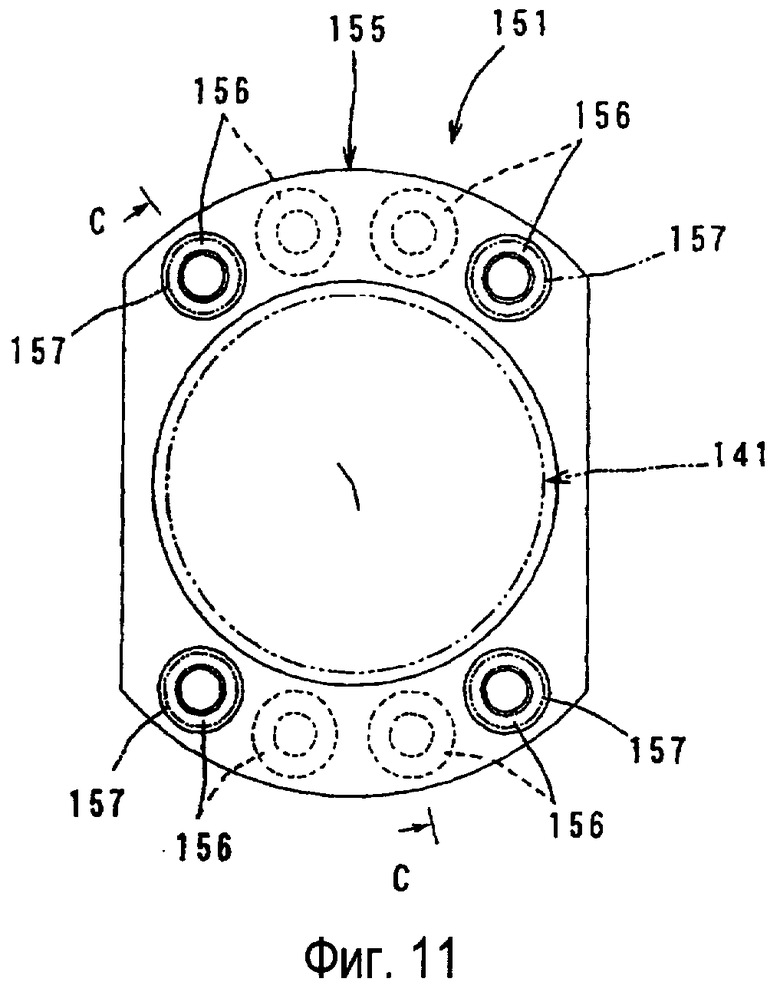
На Фиг.11 показан вид спереди средства уменьшения динамической вибрации, согласно седьмому варианту осуществления настоящего изобретения.
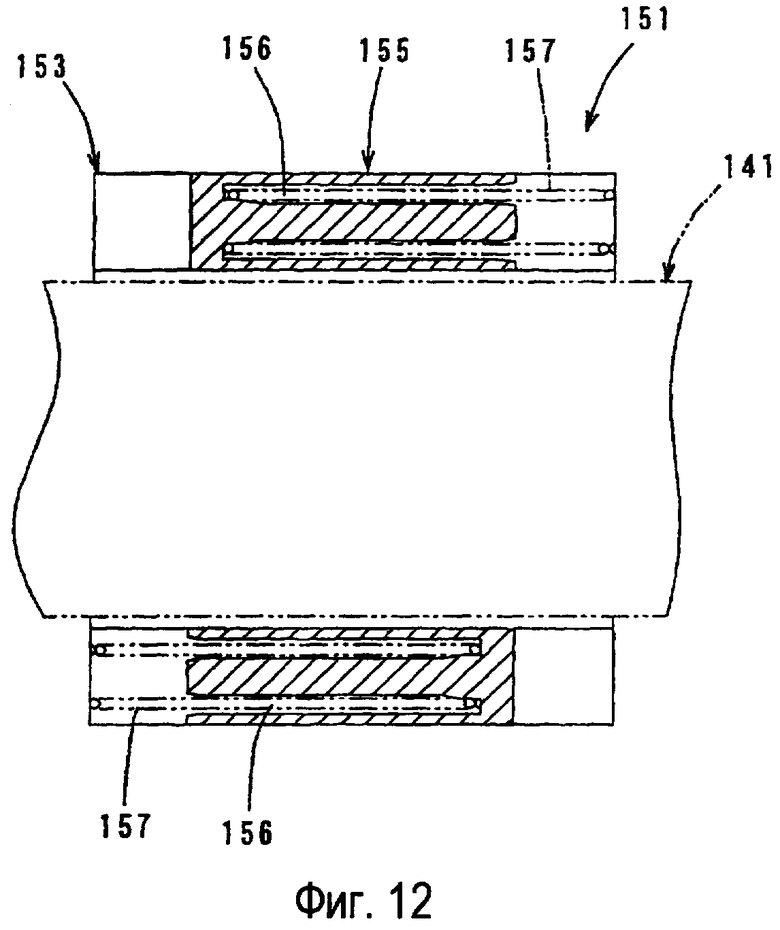
На Фиг.12 показан вид в разрезе по линии С-С, показанной на Фиг.11.
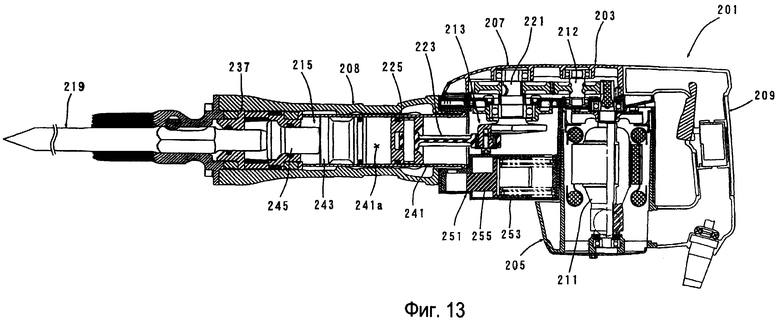
На Фиг.13 показан вид сбоку в разрезе электрического отбойного молотка, согласно восьмому варианту осуществления настоящего изобретения.
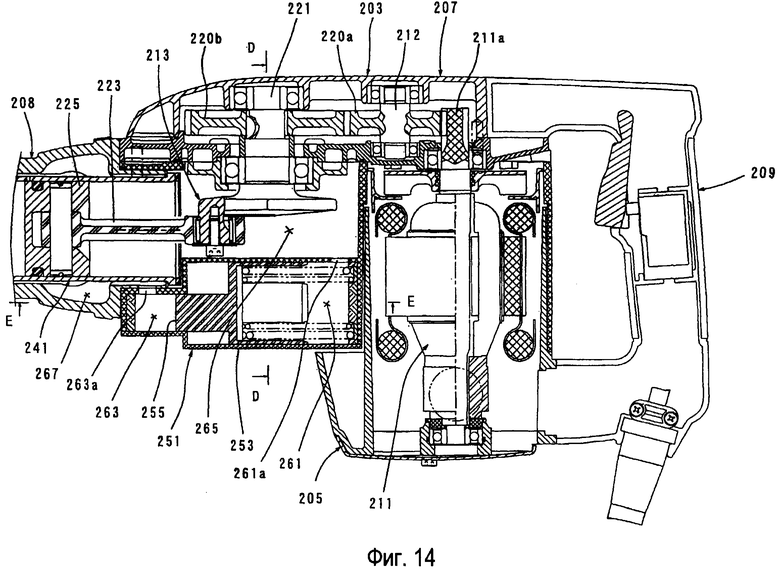
На Фиг.14 показан увеличенный вид в разрезе части электрического отбойного молотка.
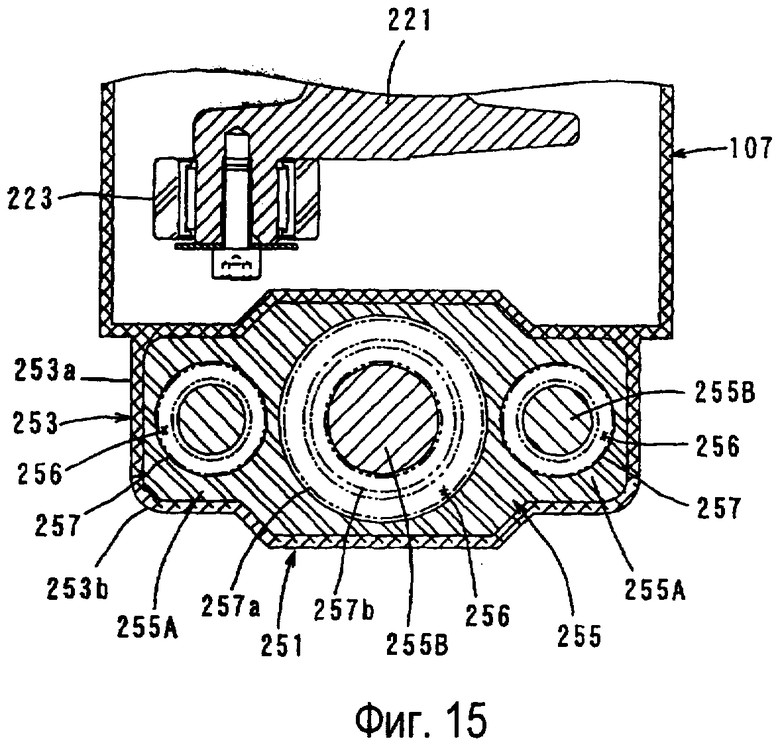
На Фиг.15 показан вид в разрезе по линии D-D, показанной на Фиг.14.
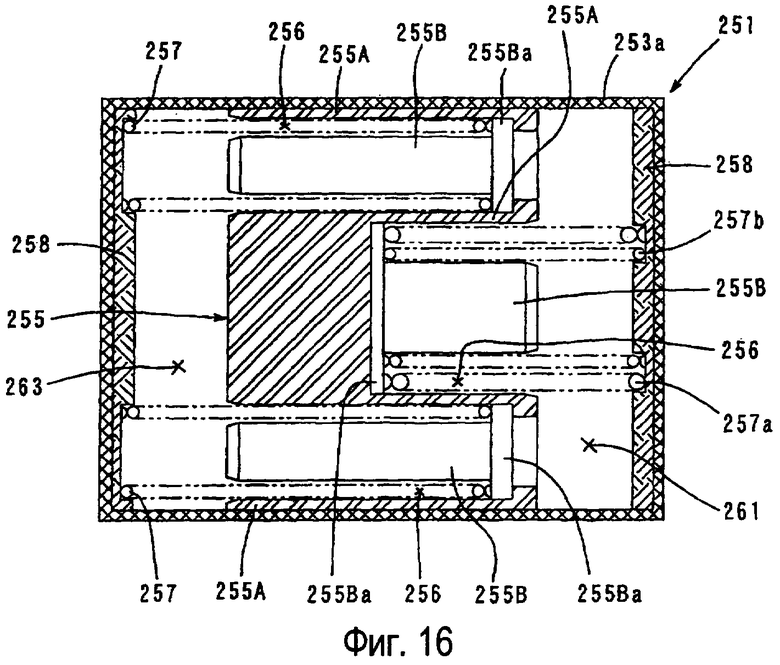
На Фиг.16 показан вид в разрезе по линии E-E, показанной на Фиг.14.
Подробное описание изобретения
Каждый из дополнительных признаков и этапов способа, раскрытых выше и ниже, могут использоваться отдельно или в комбинации с другими признаками и этапами способа для создания и изготовления усовершенствованного электроинструмента и способов использования такого электроинструмента и устройств, использованных в этом документе. Типичные примеры настоящего изобретения, которые используют многие из этих дополнительных признаков и этапов способа совместно, должны теперь быть описаны подробно со ссылками на прилагаемые чертежи. Это подробное описание предназначено только для того, чтобы представить дополнительные детали специалисту в данной области техники для практического применения предпочтительных аспектов настоящих знаний, и не предназначено для ограничения объема изобретения. Только формула изобретения определяет объем заявленного изобретения. Таким образом, комбинации признаков и этапов, раскрытые в следующем подробном описании, могут быть не нужными для практического осуществления изобретения в самом широком смысле, и вместо этого они предназначены для подробного описания некоторых примеров изобретения, которое будет приведено ниже со ссылками на прилагаемые чертежи.
Первый вариант осуществления изобретения
Первый вариант осуществления изобретения описан ниже со ссылками на фиг.1-3.
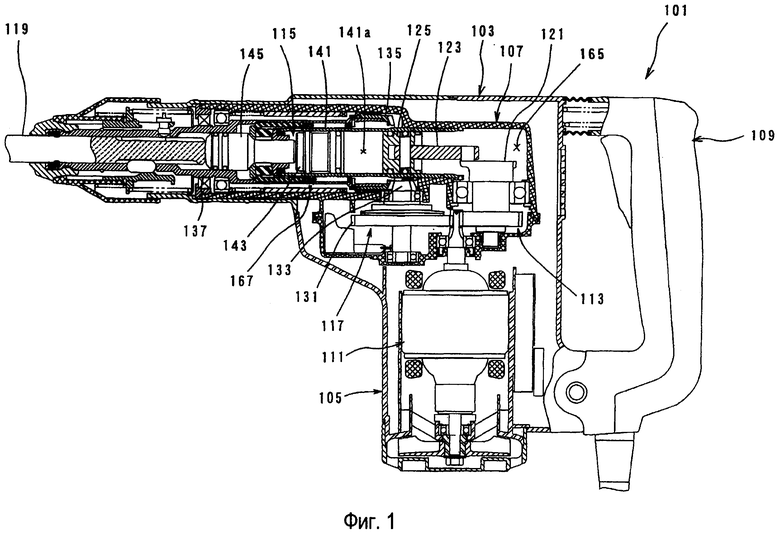
На фиг.1 схематично показан общий вид в разрезе электрического молоткового перфоратора 101, приведенного в качестве примера варианта осуществления электроинструмента согласно настоящему изобретению. На фиг.2 показан вид сверху в разрезе основной части молоткового перфоратора. На фиг.3 показан вид в разрезе средства уменьшения динамической вибрации.
Как показано на фиг.1, электрический молотковый перфоратор 101 согласно настоящему варианту осуществления включает в себя корпус 103, который образует внешний кожух молоткового перфоратора 101, держатель 137 инструмента, соединенный с концевой областью (слева на фиг.1) корпуса 103 в его продольном направлении, наконечник 119 молотка, соединенный с возможностью снятия с держателем 137 инструмента, и рукоятку 109, соединенную с другим концом (справа на фиг.1) корпуса 103 и предназначенную для удержания пользователем. Корпус 103 и наконечник 119 молотка являются признаками, соответствующими «корпусу инструмента» и «наконечнику инструмента» соответственно, согласно настоящему изобретению. Держатель 137 инструмента удерживает наконечник 119 молотка так, что он может совершать возвратно-поступательное перемещение относительно держателя 137 инструмента в его осевом направлении (в продольном направлении корпуса 103) и предотвращает вращение относительно держателя 137 инструмента в его окружном направлении. Для удобства объяснения, сторона наконечника 119 молотка называется передней стороной, а сторона рукоятки 109 называется задней стороной.
Корпус 103 главным образом включает в себя кожух 105 электродвигателя, в котором размещен приводной электродвигатель 111 и кожух 107 зубчатого редуктора, в котором размещен механизм 113 преобразования движения, ударный механизм 115 и механизм 117 передачи мощности. Выходная мощность вращения приводного электродвигателя 111 соответствующим образом преобразуется в линейное движение механизмом 113 преобразования движения и передается на ударный механизм 115. В результате чего ударным механизмом 115 создается ударное усилие в осевом направлении наконечника 119 молотка. Кроме того, скорость вращения на выходе приводного электродвигателя 111 соответствующим образом уменьшается механизмом 117 передачи мощности и затем передается на наконечник 119 молотка в виде силы вращения. В результате осуществляется вращение наконечника 119 молотка в окружном направлении.
Механизм 113 преобразования движения преобразует вращение приводного электродвигателя 111 в линейное движение и передает его на ударный механизм 115. Механизм 113 преобразования движения образует кривошипно-шатунный механизм, включающий в себя коленчатый вал 121, приводимый в движение приводным электродвигателем 111, кривошип 127 и поршень 125. Поршень 125 образует приводной элемент, выполненный с возможностью приведения в действия ударного механизма 115 и скольжения в цилиндре 141 в осевом направлении наконечника 119 молотка.
Ударный механизм 115 включает в себя ударный элемент в виде ударника 143, расположенного с возможностью скольжения в канале цилиндра 141, и промежуточный элемент в виде ударного болта 145 ударника, расположенного с возможностью скольжения в держателе 137 инструмента и передающего кинетическую энергию ударника 143 на наконечник 119 молотка. Воздушная камера 141а образована между поршнем 125 и ударником 143 в цилиндре 141. Ударник 143 приводится в действие посредством действия сжатого воздуха воздушной камеры 141а цилиндра 141, которое обусловлено перемещением скольжения поршня 125. Затем ударник 143 сталкивается с (ударяет) промежуточным элементом в виде ударного болта 145, расположенного с возможностью скольжения в держателе 137 инструмента и передающего силу удара на наконечник 119 молотка посредством ударного болта 145.
Держатель 137 инструмента выполнен с возможностью вращения и осуществляет вращение при передаче вращения приводного электродвигателя 111 механизмом 117 передачи мощности с уменьшенной скоростью на держатель 137 инструмента. Механизм 117 передачи мощности включает в себя промежуточное зубчатое колесо 131, выполненное с возможностью приведения во вращение приводным электродвигателем 111, малое коническое зубчатое колесо 133, выполненное с возможностью вращения вместе с промежуточным зубчатым колесом 131, и большое коническое зубчатое колесо 135, выполненное с возможностью взаимодействия с малым коническим зубчатым колесом 133, и вращения вокруг продольной оси корпуса 103. Механизм 117 передачи мощности передает вращение приводного электродвигателя 111 на держатель 137 инструмента, а также на наконечник 119 молотка, удерживаемый держателем 137 инструмента. Молотковый перфоратор 101 может соответствующим образом переключаться между ударным режимом, в котором работа на заготовке выполняется посредством приложения только ударной силы в осевом направлении к наконечнику 119 молотка, и режимом ударного сверления, в котором работа на заготовке выполняется посредством приложения как ударной силы в осевом направлении, так и силы вращения в направлении вдоль окружности к наконечнику 119 молотка. Эта конструкция непосредственно не относится к настоящему изобретению, и поэтому не будет описана.
Во время работы молоткового перфоратора 101 (когда приводится в действие наконечник 119 молотка), в корпусе 103 создается импульсная и циклическая вибрация в осевом направлении наконечника молотка. Основной вибрацией корпуса, подлежащей уменьшению, является сила противодействия сжатию, которое возникает, когда поршень 129 и ударник 143 сжимают воздух в камере 141а и сила противодействия удару, которая возникает с небольшим отставанием по времени за силой противодействия сжатию, когда ударник 143 ударяет наконечник 119 молотка посредством ударного болта 145.
Как показано на фиг.2, молотковый перфоратор 101 имеет пару средств 151 уменьшения динамической вибрации для уменьшения упомянутой выше вибрации, вызываемой в корпусе 103. Средства уменьшения 151 динамической вибрации расположены с обеих сторон оси наконечника 119 молотка и имеют одинаковую конструкцию. Каждое из средств 151 уменьшения динамической вибрации главным образом включает в себя цилиндрический корпус 153 круглого сечения, удлиненный в осевом направлении наконечника молотка и образованный рядом с корпусом 103, груз 155 уменьшения вибрации, удлиненный в направлении скольжения и установленный с возможностью скольжения в цилиндрическом корпусе 153, и переднюю, и заднюю цилиндрические пружины 157, расположенные на передней и задней стороне груза 155 в осевом направлении наконечника молотка. Цилиндрический корпус 153 и цилиндрические пружины 157 являются признаками, соответствующими «боковому элементу корпуса» и «упругому элементу», соответственно, согласно настоящему изобретению. Цилиндрические пружины 157 оказывают соответствующие усилия сжатия на груз 155 друг к другу, когда груз 155 перемещается в продольном направлении цилиндрического корпуса 153 (в осевом направлении наконечника молотка). Кроме того, цилиндрический корпус 153 выполнен в виде цилиндрической направляющей, обеспечивающей стабильность перемещения груза 155. Хотя в этом варианте осуществления цилиндрический корпус 153 выполнен за одно целое с корпусом 103 (кожухом 107 зубчатого редуктора), цилиндрический корпус 153 может быть выполнен отдельно и установлен с возможностью снятия на корпусе 103.
Груз 155 и цилиндрические пружины 157 служат в качестве элементов уменьшения вибрации в средстве 151 уменьшения динамической вибрации на корпусе 103 и взаимодействуют для пассивного уменьшения вибрации корпуса 103 во время работы молоткового перфоратора 101. Таким образом, вибрации корпуса 103 в молотковом перфораторе 101 могут гаситься или уменьшаться.
Кроме того, в этом варианте осуществления изобретения, средство 151 уменьшения динамической вибрации имеет первую приводную камеру 161 и вторую приводную камеру 163 на передней и задней стороне груза 155 в цилиндрическом корпусе 153. Первая приводная камера 161 на задней стороне (справа на фиг.2) сообщается с герметичной камерой 165 шатуна, которая обычно не сообщается с наружным пространством, посредством первой сообщающей части 161а. Вторая приводная камера 163 на передней стороне (слева на фиг.2) сообщается с пространством 167 размещения цилиндра кожуха 107 зубчатого редуктора, посредством второй сообщающей части 163а. Давление в камере 165 шатуна изменяется во время приведения в действие механизма 113 преобразования движения. Это обуславливается изменением объема камеры 165 шатуна, когда поршень 125 механизма 113 преобразования движения совершает возвратно-поступательное перемещение в цилиндре 141. Груз 155 средства 151 уменьшения динамической вибрации активно перемещается посредством приложения пульсирующего давления в камере 165 шатуна в первую приводную камеру 161 через первую сообщающую часть 161а. Таким образом, средство 151 уменьшения динамической вибрации выполняет функцию уменьшения вибрации. Более конкретно, средство 151 уменьшения динамической вибрации имеет не только упомянутую выше функцию пассивного уменьшения вибрации, но также служит в качестве механизма активного уменьшения вибрации вынужденной вибрацией, при которой груз 155 активно перемещается. Таким образом, вибрация, вызванная в корпусе 103 во время работы отбойного молотка, может дополнительно эффективно уменьшаться.
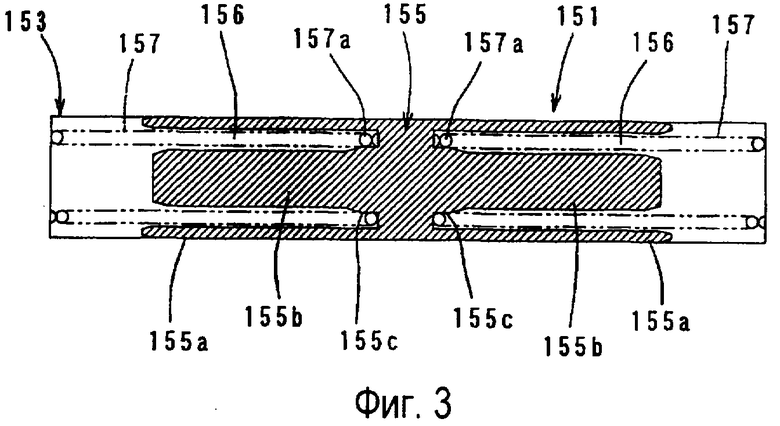
На фиг.3 конструкция средства 151 уменьшения динамической вибрации показана более подробно. Груз 155 средства 151 уменьшения динамической вибрации, согласно этому варианту осуществления, является удлиненным в осевом направлении наконечника молотка и цилиндрическим и имеет переднюю и заднюю полости 156 размещения пружин. Полости 156 размещения пружин являются кольцевыми в сечении и проходят в заданных областях с обеих сторон груза 155 в его продольном направлении. Полости 156 размещения пружин являются признаками, соответствующими «внутренней полости» согласно настоящему изобретению. Передние и задние кольцевые полости 156 размещения пружин проходят от продольных торцевых поверхностей груза 155 в направлении его продольной оси (направлении длины) и заканчиваются, по существу, около середины груза 155. Полости 156 размещения пружин выполнены в виде пространства (канавки), окруженного внешним цилиндрическим участком 155а и внутренним удлиненным участком 155b груза 155. Более конкретно, в этом варианте осуществления груз 155 с полостями 156 размещения пружин имеет цельную конструкцию с внешним цилиндрическим участком 155а и внутренним удлиненным участком 155b и выполняется, например, с использованием отливки.
Цилиндрические пружины 157 вставлены и размещены в передней и задней полостях 156 размещения пружин. Конец каждой цилиндрической пружины 157, передней и задней в направлении установки удерживается в контакте с нижней (концевой) поверхностью соответствующей полости 156 размещения пружины, тогда, как другой конец удерживается в контакте с осевой концевой поверхностью цилиндрического корпуса 153. Таким образом, цилиндрические пружины 157 прилагают соответствующие смещающие усилия к грузу 155 друг навстречу другу в продольном направлении. Более конкретно, груз 155 выполнен с возможностью перемещения в осевом направлении под действием соответствующих смещающих усилий, действующих друг навстречу другу. Кроме того, каждая из полостей 156 размещения пружин имеет большую ширину, чем диаметр проволоки цилиндрической пружины 157. Следовательно, цилиндрическая пружина 157 свободно входит в полость 156 размещения пружины так, чтобы цилиндрическая пружина 157 не имела контакта с внутренней поверхностью цилиндрического участка 155а и внешней поверхностью внутреннего удлиненного участка 155b. Установочный участок 155с пружины, с диаметром, по существу, равным внутреннему диаметру цилиндрической пружины 157, образован на удлиненном участке 155b на нижней стороне полости 156 размещения пружины. Концевой виток 157а цилиндрической пружины 157 надет на установочный участок 155с пружины. Таким образом, предотвращается перемещение цилиндрической пружины 157 в радиальном направлении относительно груза 155.
Как описано выше, в средстве 151 уменьшения динамической вибрации согласно этому варианту осуществления, выполнена полость 156 размещения пружины внутри груза 155 и цилиндрическая пружина 157 расположена в полости 156 размещения пружины. При такой конструкции, цилиндрический участок 155а, имеющий массу большей плотности, чем цилиндрическая пружина 157, располагается на внешней периферийной стороне цилиндрической пружины 157. Таким образом, по сравнению с известной конструкцией, в которой цилиндрическая пружина, с меньшей плотностью, чем груз, располагается на внешней периферийной стороне груза, общая масса груза 155 и цилиндрической пружины 157, предусмотренных в качестве элементов уменьшения вибрации, может быть увеличена, так что улучшается использование объема. В результате, мощность уменьшения вибрации средства 151 уменьшения динамической вибрации может быть увеличена. С другой стороны, если груз 155 и цилиндрическая пружина 157 выполняются с общей массой, одинаковой с известной конструкцией, средство 151 уменьшения динамической вибрации может уменьшаться в размере в радиальном направлении. Кроме того, при конструкции, в которой цилиндрический участок 155а груза 155 установлен на внешней периферийной стороне цилиндрической пружины 157, длина контакта груза 155 в направлении перемещения или осевой длины поверхности скольжения груза 155, в контакте с поверхностью внутренней стенки цилиндрического корпуса 153 груза 155 может увеличиваться. Таким образом, легко может обеспечиваться стабильное перемещение груза 155.
Более того, при конструкции, в которой цилиндрическая пружина 157 расположена в полости 156 размещения пружины груза 155, внешний диаметр цилиндрической пружины 157 может уменьшаться. При уменьшении диаметра цилиндрической пружины 157 создается меньшее напряжение, так что может предусматриваться цилиндрическая пружина 157 с большей жесткостью, при этом сохраняющая долговечность. В результате мощность уменьшения вибрации средства 151 уменьшения динамической вибрации может быть дополнительно увеличена.
Кроме того, посредством расположения цилиндрической пружины 157 в полости 156 размещения пружины увеличивается осевая длина цилиндрической пружины 157 на величину уменьшения ее внешнего диаметра. Однако может быть уменьшена осевая длина средства 151 уменьшения динамической вибрации и, следовательно, уменьшен его размер, поскольку контактное положение цилиндрической пружины 157 относительно груза 155 может располагаться к середине груза 155 в продольном направлении.
Таким образом, согласно этому варианту осуществления, средство 151 уменьшения динамической вибрации может быть уменьшено в размере, при этом имея увеличенную мощность уменьшения вибрации.
(Второй вариант осуществления изобретения)
Второй вариант осуществления изобретения описан ниже со ссылкой на фиг.4.
Второй вариант осуществления является модификацией конструкции груза 155 в средстве 151 уменьшения динамической вибрации и имеет одинаковую конструкцию с описанным выше первым вариантом осуществления, за исключением конструкции средства 151 уменьшения динамической вибрации.
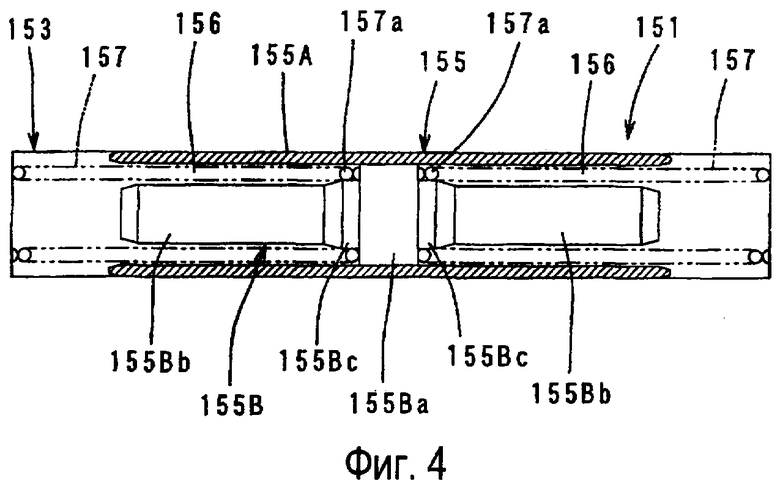
Как показано на фиг.4, груз 155 средства 151 уменьшения динамической вибрации согласно этому варианту осуществления имеет внешний цилиндрический элемент 155А груза и внутренний удлиненный элемент 155В груза, который выполнен отдельно от цилиндрического элемента 155А груза и размещен в цилиндрическом элементе 155А груза. Цилиндрический элемент 155А груза и удлиненный элемент 155В груза являются признаками, соответствующими «второй части» и «первой части», соответственно, согласно настоящему изобретению.
Цилиндрический элемент 155А груза и удлиненный элемент 155В груза имеют, по существу, одинаковую осевую длину. Удлиненный элемент 155В груза имеет ступенчатую удлиненную форму с круглым участком 155Ва большого диаметра, образованным в середине в осевом направлении, и с круглыми участками 155Вb малого диаметра, интегрально соединенными в осевом направлении с обоими концами круглого участка 155Ва большого диаметра. Участок 155Ва большого диаметра удлиненного элемента 155В груза, запрессованный в канал цилиндрического элемента 155А груза, является признаком, соответствующим «соединительной части» согласно настоящему изобретению.
Участки 155Вb малого диаметра удлиненного элемента 155В груза имеют большую длину в осевом направлении, чем участок 155Ва большого диаметра. Таким образом, между внутренней поверхностью цилиндрического элемента 155А груза и внешней поверхностью участков 155Вb малого диаметра удлиненного элемента 155В груза, размещенной в цилиндрическом элементе 155А груза, образованы передняя и задняя полости 156 размещения пружин, каждая из которых имеет кольцевое сечение и большую осевую длину, чем участок 155Ва большого диаметра. Цилиндрические пружины 157 вставлены и размещены в передней и задней полости 156 размещения пружин. Установочный участок 155Вс пружины с диаметром, по существу, равным, или немного меньшим внутреннего диаметра цилиндрической пружины 157, образован в соединении между участком 155Ва большого диаметра и участками 155Вb малого диаметра. Концевой виток 157а каждой из передней и задней цилиндрических пружин 157 в направлении установки надет на соответствующий установочный участок 155Вс пружины и удерживается в контакте с нижней частью соответствующей полости 156 размещения пружины или соответствующей осевой торцевой поверхностью участка 155Ва большого диаметра. Другой конец цилиндрической пружины 157 удерживается в контакте с соответствующей осевой торцевой поверхностью цилиндрического корпуса 153. Таким образом, передняя и задняя цилиндрические пружины 157 оказывают соответствующие смещающие усилия на груз 155 друг навстречу другу.
При средстве 151 уменьшения динамической вибрации согласно этому варианту осуществления, подобном описанному выше в первом варианте осуществления, данный вариант осуществления обеспечивает уменьшение размера средства 151 уменьшения динамической вибрации, при увеличении мощности уменьшения вибрации. Кроме того, в конструкции, в которой груз выполнен из двух частей, или цилиндрического элемента 155А груза и удлиненного элемента 155В груза, цилиндрический элемент 155А груза и удлиненный элемент 155В груза могут выполняться отдельно для облегчения операции изготовления груза 155. В частности, в конструкции, в которой удлиненный элемент 155В груза запрессован в цилиндрический элемент 155А груза, внешний цилиндрический элемент 155А груза может иметь форму прямого цилиндра, что является эффективным для увеличения производительности.
Кроме того, в конструкции, в которой цилиндрический элемент 155А груза и удлиненный элемент 155В груза выполнены в виде отдельных элементов, цилиндрический элемент 155А груза и удлиненный элемент 155В груза могут выполняться из разных материалов. Что касается цилиндрического элемента 155А груза, расположенного снаружи, ввиду того, что он скользит вдоль внутренней стенки цилиндрического корпуса 153, он может выполняться из материала с высокой скользящей способностью (низкого трения) или с высоким сопротивлением износу. Что касается удлиненного элемента 155В груза, расположенного внутри, то при основной задаче сохранения его веса для уменьшения вибрации, он может быть выполнен из материала с более высоким удельным весом, чем у цилиндрического элемента 155А груза.
(Третий вариант осуществления изобретения)
Третий вариант осуществления изобретения описан со ссылкой на фиг.5.
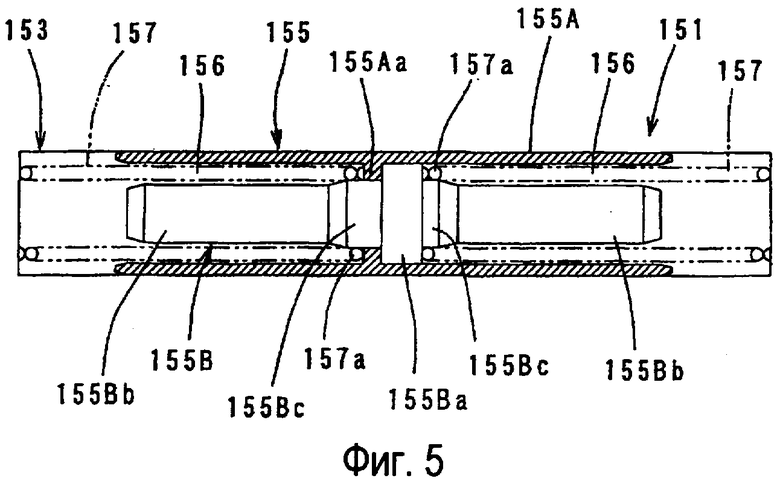
Третий вариант осуществления является модификацией описанного выше второго варианта осуществления. В этом варианте осуществления, средство 151 уменьшения динамической вибрации, цилиндрический элемент 155А груза и удлиненный элемент 155В груза, размещенный в цилиндрическом элементе 155А груза, образуют груз 155 и интегрально соединены друг с другом посредством использования смещающих усилий передней и задней цилиндрических пружин 157, которые действуют на цилиндрический элемент 155А груза и удлиненный элемент 155В груза друг навстречу другу. Цилиндрический элемент 155А груза и удлиненный элемент 155В груза являются признаками, соответствующими «второй части» и «первой части», соответственно, согласно настоящему изобретению.
В этом варианте осуществления установочная планка в виде фланца 155Аа образована на внутренней поверхности цилиндрического элемента 155А груза, по существу, в середине в осевом направлении, и выступает радиально внутрь. Удлиненный элемент 155В груза имеет участок 155Ва большого диаметра и участки 155Вb малого диаметра. Участки 155Вb малого диаметра интегрально соединены с обоими осевыми концами участка 155Ва большого диаметра и являются более длинными в осевом направлении, чем участок 155Ва большого диаметра. Удлиненный элемент 155В груза свободно входит (вставляется) в канал цилиндрического элемента 155А груза. Затем, концевая поверхность участка 155Ва большого диаметра в направлении установки контактирует с фланцем 155Аа так, чтобы установленный удлиненный элемент 155В груза встал на место. В результате, передняя и задняя полости 156 размещения пружин, каждая из которых имеет кольцевое сечение и большую осевую длину, чем участок 155Ва большого диаметра, образуются между внешней поверхностью участков 155Вb малого диаметра и внутренней поверхностью цилиндрического элемента 155А груза.
Цилиндрические пружины 157 вставлены и размещены в передней и задней полости 156 размещения пружин. Установочный участок 155Вс пружины с диаметром, по существу, равным, или немного меньшим внутреннего диаметра цилиндрической пружины 157, образован в соединении между участком 155Ва большого диаметра и участками 155Вb малого диаметра. Концевой виток 157а передней цилиндрической пружины 157 (слева на фиг.5) в направлении установки надет на соответствующий установочный участок 155Вс пружины и удерживается в контакте с соответствующей осевой торцевой поверхностью фланца 155Аа, в то время, как другой конец цилиндрической пружины 157 удерживается в контакте с соответствующей осевой торцевой поверхностью цилиндрического корпуса 153. Концевой виток 157а задней цилиндрической пружины 157 (справа на фиг.5) в направлении установки надет на соответствующий установочный участок 155Вс пружины и удерживается в контакте с соответствующей осевой торцевой поверхностью фланца 155Аа, тогда, как другой конец цилиндрической пружины 157 удерживается в контакте с нижней частью соответствующей полости 156 размещения пружины или соответствующей осевой торцевой поверхностью участка 155Ва большого диаметра, тогда, как другой конец цилиндрической пружины 157 удерживается в контакте с соответствующей осевой торцевой поверхностью цилиндрического корпуса 153. Таким образом, смещающие усилия передней и задней цилиндрических пружин 157 действуют друг навстречу другу на цилиндрический элемент 155А груза и удлиненный элемент 155В груза. Удлиненный элемент 155В груза и цилиндрический элемент 155А груза толкают друг на друга смещающими усилиями передней и задней цилиндрических пружин 157, действующих друг навстречу другу, так, что цилиндрический элемент 155А груза и удлиненный элемент 155В груза интегрально соединяются друг с другом. Участок 155Ва большого диаметра и фланец 155Аа являются признаками, соответствующими «соединительной части» согласно настоящему изобретению.
Средство 151 уменьшения динамической вибрации согласно этому варианту осуществления имеет описанную выше конструкцию. Таким образом, также как и описанный выше первый вариант осуществления, данный вариант осуществления обеспечивает уменьшение размера средства 151 уменьшения динамической вибрации, при увеличении мощности уменьшения вибрации. Кроме того, как и описанный выше второй вариант осуществления, данный вариант осуществления обеспечивает то, что, цилиндрический элемент 155А груза и удлиненный элемент 155В груза могут выполняться отдельно, и цилиндрический элемент 155А груза, и удлиненный элемент 155В груза могут выполняться из разных материалов.
В частности, согласно этому варианту осуществления цилиндрический элемент 155А груза и удлиненный элемент 155В груза интегрально соединены друг с другом с использованием смещающих усилий передней и задней цилиндрических пружин 157, действующих друг навстречу другу. Более конкретно, цилиндрический элемент 155А груза и удлиненный элемент 155В груза взаимодействуют друг с другом посредством соответствующих взаимодействующих поверхностей, образованных в направлении, перпендикулярном продольному направлению (направлению перемещения), или фланца 155Аа и участка 155Ва большого диаметра. В этом состоянии взаимодействие взаимодействующих поверхностей поддерживается использованием смещающих усилий передней и задней цилиндрических пружин 157, действующих друг навстречу другу. Таким образом, цилиндрический элемент 155А груза и удлиненный элемент 155В груза могут быть легко интегрально соединены друг с другом простой сборкой, без необходимости использования средства для соединения запрессовкой.
(Четвертый вариант осуществления изобретения)
Четвертый вариант осуществления изобретения описан ниже со ссылками на фиг.6 и 7. Данный вариант осуществления является модификацией конструкции полостей 156 размещения пружин груза 155 в средстве 151 уменьшения динамической вибрации и является идентичным по конструкции с описанным выше первым вариантом осуществления, за исключением конструкции средства 151 уменьшения динамической вибрации.
Как показано на фиг.6 и 7, в средстве 151 уменьшения динамической вибрации согласно этому варианту осуществления, груз 155 имеет, по существу, блочную прямоугольную форму, удлиненную в продольном и вертикальном направлениях. В грузе 155 выполнены параллельно одна над другой четыре полости 156 размещения пружин (по две в передней и задней стороне), каждая имеет кольцевое сечение и проходит в продольном направлении груза 155 (в осевом направлении наконечника 119 молотка). Задние полости 156 размещения пружин открыты в осевом заднем конце (правый конец на фиг.7) груза 155 и проходят вперед от открытого конца и расположены в верхнем и нижнем участках груза 155. Передние полости 156 размещения пружин открыты в осевом переднем конце (левый конец на фиг.7) груза 155 и проходят назад от открытого конца и расположены в среднем участке груза 155 в вертикальном направлении. Цилиндрические пружины 157 размещены в передних и задних полостях 156 размещения пружин. Передние полости 156 размещения пружин и задние полости 156 размещения пружин являются признаками, соответствующими «первой внутренней полости» и «второй внутренней полости» соответственно, согласно настоящему изобретению.
Как описано выше, в этом варианте осуществления, передние и задние полости 156 размещения цилиндрических пружин 157 выполнены в грузе 155 и расположены так, что перекрывают друг друга, если смотреть в направлении, перпендикулярном продольному направлению груза 155 (в вертикальном направлении). При такой конструкции длина груза 155 в продольном направлении может быть дополнительно уменьшена, по сравнению с вышеописанными вариантами осуществления, так что средство 151 уменьшения динамической вибрации может быть дополнительно уменьшено в размере в его продольном направлении. Следовательно, эта конструкция особенно эффективна, когда пространство для установки средства 151 уменьшения динамической вибрации в корпусе 103 ограничено в продольном направлении корпуса 103. Кроме того, передние полости 156 размещения пружин расположены в середине в вертикальном направлению груза 155 и между задними полостями 156 размещения пружин, расположенными над передними полостями 156 размещения пружин и под ними. При такой конструкции смещающие усилия передних и задних цилиндрических пружин 157, действующие на груз 155, могут уравновешиваться в направлении перемещения груза 155. В результате, может предотвращаться создание бесполезной вибрации (в двух плоскостях) груза 155, так что перемещение груза 155 может стабилизироваться.
(Пятый вариант осуществления изобретения)
Пятый вариант осуществления изобретения описан ниже со ссылками на фиг.8. Данный вариант осуществления является модификацией описанного выше четвертого варианта осуществления. В этом варианте осуществления, как показано на фиг.8, средство 151 уменьшения динамической вибрации выполнено на основании конструкции, в которой передние и задние полости 156 размещения пружин расположены в грузе 155 так, чтобы перекрывать друг друга, если смотреть в направлении, перпендикулярном продольному направлению груза 155. Кроме того, внешняя форма груза 155 средства 151 уменьшения динамической вибрации является полукруглой (по существу, полукруглая форма, если смотреть от наконечника 119 молотка) и соответствует форме (криволинейной поверхности) внешней периферии цилиндрического цилиндра 141. Таким образом, средство 151 уменьшения динамической вибрации расположено вдоль внешнего периферии цилиндра 141. Кроме того, как в упомянутых выше вариантах осуществления, передние и задние полости 156 размещения пружин в сечении являются кольцевыми. Передние полости 156 размещения пружин и задние полости 156 размещения пружин являются признаками, соответствующими «первой внутренней полости» и «второй внутренней полости» соответственно, согласно настоящему изобретению.
Согласно этому варианту осуществления, имеющему описанную выше конструкцию, средство 151 уменьшения динамической вибрации может быть дополнительно уменьшено по высоте в вертикальном направлении, по сравнению с описанным выше четвертым вариантом осуществления, и при этом также уменьшено в размере в продольном направлении. Кроме того, расположение средства 151 уменьшения динамической вибрации вдоль внешней периферии цилиндра 141 (или цилиндрической части, в которой размещен цилиндр 141) может исключить или минимизировать мертвое пространство, которое может образоваться вокруг средства 151 уменьшения динамической вибрации так, чтобы корпус 103 мог быть уменьшен в размере более рациональным и эффективным образом. Более того, в случае, когда средство 151 уменьшения динамической вибрации расположено вдоль внешнего периметра цилиндра 141 (или цилиндрической части, в которой размещен цилиндр 141), хотя на фиг.8 средство 151 уменьшения динамической вибрации расположено только на одной стороне цилиндра, целесообразно расположить пару средств 151 уменьшения динамической вибрации предпочтительно на обеих сторонах цилиндра, как показано на фиг.2 для предотвращения создания бесполезной вибрации (в двух плоскостях) приведением в действие средств 151 уменьшения динамической вибрации.
(Шестой вариант осуществления изобретения)
Шестой вариант осуществления настоящего изобретения описан ниже со ссылками на фиг.9 и 10. Данный вариант осуществления является модификацией описанного выше четвертого варианта осуществления. В этом варианте осуществления, как показано на фиг.9 и 10, средство 151 уменьшения динамической вибрации образовано на основании конструкции, в которой передние и задние полости 156 размещения пружин расположены в грузе 155 так, чтобы перекрывать друг друга, если смотреть в вертикальном направлении. Кроме того, цилиндрическая пружина 157, предназначенная для передней полости 156 размещения пружин, имеет характеристику жесткости пружины, отличную от характеристики жесткости пружины, предназначенной для задней полости 156 размещения пружин, так что количество цилиндрических пружин 157, подлежащих использованию, может быть уменьшено. Передние полости 156 размещения пружин и задние полости 156 размещения пружин являются признаками, соответствующими «первой внутренней полости» и «второй внутренней полости» соответственно, согласно настоящему изобретению.
В этом варианте осуществления, груз 155 имеет, по существу, блочную прямоугольную форму, удлиненную в продольном и вертикальном направлениях. Одна задняя полость 156 размещения пружин и две передних полости 156 размещения пружин расположены параллельно одна над другой в грузе 155. Как и в упомянутых выше вариантах осуществления, передняя и задняя полости 156 размещения пружин имеют кольцевое сечение. Задняя полость 156 размещения пружины расположена в вертикальном направлении в середине и между двумя передними полостями 156 размещения пружин, расположенными в верхнем и нижнем участках груза 155. Цилиндрические пружины 157 расположены в передней и задней полостях 156 размещения пружин. Задняя цилиндрическая пружина 157 имеет более высокую характеристику жесткости пружины, чем передние цилиндрические пружины 157. Более конкретно, характеристики жесткости пружины передней и задней цилиндрических пружин 157 выбираются так, чтобы смещающие усилия передней и задней цилиндрических пружин 157, действующие на груз 155, уравновешивались друг другом. Кроме того, две передних цилиндрических пружины 157 имеют одинаковые характеристики жесткости.
Согласно этому варианту осуществления, имеющему описанную выше конструкцию, количество цилиндрических пружин 157 на одной стороне (задней стороне в этом варианте осуществления) может быть уменьшено, в то же время поддерживая равновесие между смещающими усилиями двух передних цилиндрических пружин 157 и задней цилиндрической пружины 157. В результате, средство 151 уменьшения динамической вибрации (груз 155) может быть дополнительно уменьшено по высоте в вертикальном направлении, по сравнению с упомянутым выше четвертым вариантом осуществления, и при этом также уменьшено в размере в продольном направлении. Таким образом, средство 151 уменьшения динамической вибрации может быть дополнительно уменьшено в размере.
В описанных выше вариантах осуществления с четвертого по шестой, направление, в котором описывается перекрывание полостей 156 размещения пружин, является вертикальным, что основано на предположении установки средства 151 уменьшения динамической вибрации в вертикальном положении. Таким образом, если средство 151 уменьшения динамической вибрации установлено в горизонтальном положении, полости 156 размещения пружин перекрывают друг друга, если смотреть в горизонтальном направлении.
(Седьмой вариант осуществления изобретения)
Седьмой вариант осуществления настоящего изобретения описан ниже со ссылками на фиг.11 и 12. В этом варианте осуществления средство 151 уменьшения динамической вибрации расположено с возможностью окружения внешней периферии цилиндра 141 (или цилиндрической части, в которой расположен цилиндр 141), а передние и задние полости 156 размещения пружин расположены в грузе 155 так, чтобы перекрывать друг друга, если смотреть в окружном направлении, перпендикулярном продольному направлению груза 155.
Более конкретно, как показано на фиг.11 и 12, груз 155 имеет, по существу, кольцевую форму, если смотреть со стороны наконечника 119 молотка (спереди). Передние и задние полости 156 размещения пружин выполнены параллельными грузу 155, и расположены так, чтобы перекрывать друг друга в окружном направлении груза 155. Цилиндрические пружины 157 расположены в полостях 156 размещения пружин. Как и в упомянутых вариантах осуществления, передние и задние полости 156 размещения пружин имеют кольцевое сечение. Кроме того, в этом варианте осуществления, предусмотрены четыре передних полости 156 размещения пружин и четыре задних полости 156 размещения пружин, но их количество может соответствующим образом увеличиваться или уменьшаться. Передние полости 156 размещения пружин и задние полости 156 размещения пружин являются признаками, соответствующими «первой внутренней полости» и «второй внутренней полости» соответственно, согласно настоящему изобретению.
В этом варианте осуществления, при конструкции, в которой средство 151 уменьшения динамической вибрации расположено (установлено) с возможностью окружения внешней периферии цилиндра 141 (или цилиндрической части, в которой расположен цилиндр 141), может быть обеспечена рациональная конструкция, которая исключает или минимизирует мертвое пространство вокруг средства 151 уменьшения динамической вибрации. Кроме того, при конструкции, в которой груз 155 имеет, по существу, кольцеобразную форму, а передние и задние полости 156 размещения пружин расположены так, что перекрывают друг друга в окружном направлении груза 155, может быть уменьшена осевая длина груза 155 так, что может быть уменьшена осевая длина средства 151 уменьшения динамической вибрации.
(Восьмой вариант осуществления изобретения)
Восьмой вариант осуществления настоящего изобретения описан ниже со ссылками на фиг.13-16. Данный вариант осуществления используется в электрическом отбойном молотке 201, приведенном в качестве примера большого электроинструмента такого типа, в котором приводной электродвигатель 211 расположен со стороны рукоятки 209 коленчатого вала 221. На фиг.13 показан вид сбоку в разрезе электрического отбойного молотка, согласно восьмому варианту осуществления настоящего изобретения. Как показано на фиг.13 и 14, корпус 203, который образует внешний кожух отбойного молотка 201, главным образом включает в себя кожух 205 электродвигателя, в котором размещен приводной электродвигатель 211 и кожух 207 зубчатого редуктора, в котором размещен механизм 213 преобразования движения, и цилиндрическую часть 208, в которой расположен ударный механизм 215. Кожух 207 зубчатого редуктора соединен с передней верхней областью кожуха 205 электродвигателя. Цилиндрическая часть 208 соединена с передним концом кожуха 207 зубчатого редуктора и проходит вперед по оси наконечника 219 молотка. Кроме того, рукоятка 209 расположена сзади кожуха 205 электродвигателя, при этом ее верхний конец соединен с задним концом кожуха 207 зубчатого редуктора, а нижний конец соединен с задним концом кожуха 205 электродвигателя.
Приводной электродвигатель 211 расположен на оси наконечника 219 молотка так, что его ось вращения пересекается с осью наконечника 219 молотка или проходит вертикально. Механизм 213 преобразования движения преобразует вращение приводного электродвигателя 211 в линейное движение и передает его на ударный механизм 215. Механизм 213 преобразования движения расположен в верхней области внутренней полости кожуха 207 зубчатого редуктора.
Как и в описанном выше, первом варианте осуществления изобретения, механизм 213 преобразования движения образует кривошипно-шатунный механизм, включающий в себя коленчатый вал 221, приводимый в действие приводным электродвигателем 211, кривошип 223, соединенный с коленчатым валом 221 эксцентриковым шипом, и поршень 225, выполненный с возможностью совершения возвратно-поступательного перемещения посредством кривошипа 223. Коленчатый вал 221 приводится во вращение посредством двух зубчатых колес 220а, 220b для уменьшения скорости посредством приводного электродвигателя 211. Одно зубчатое колесо 220а установлено на промежуточном валу 212, расположенном между коленчатым валом 221 и валом 211а электродвигателя, а другое зубчатое колесо 220b расположено на коленчатом валу 221. Кривошипно-шатунный механизм и зубчатые колеса 220а, 220b образуют «часть механизма привода» согласно настоящему изобретению.
Как и в описанном выше, первом варианте осуществления, ударный механизм 215 включает в себя ударный элемент в виде ударника 243, расположенного с возможностью скольжения в канале цилиндра 241, и промежуточный элемент в виде ударного болта 245, расположенного с возможностью скольжения в держателе 237 инструмента, и передающего кинетическую энергию ударника 243 на наконечник 219 молотка. Воздушная камера 241а образована между поршнем 225 и ударником 243 в цилиндре 241. Ударник 243 приводится в действие посредством действия сжатого воздуха воздушной камеры 241а цилиндра 241, которое обусловлено скольжением поршня 225. Затем ударник 243 сталкивается (ударяет) промежуточный элемент в виде ударного болта 245, расположенного с возможностью скольжения в держателе 237 инструмента, и передает силу удара на наконечник 219 молотка через ударный болт 245.
В случае большого электрического отбойного молотка 201 такого типа, в котором приводной электродвигатель 211 расположен на оси наконечника 219 молотка, в конструкции, такой, как описана выше, в которой часть механизма преобразования вращения приводного электродвигателя 211 в линейное движение и приведение в действие наконечника 219 молотка, расположена в верхней области кожуха 207 зубчатого редуктора, в нижней области существует свободное пространство (область с нижней стороны, проходящая перпендикулярно передней поверхности кожуха 205 электродвигателя) кожуха 207 зубчатого редуктора. В этом варианте осуществления изобретения, средство 251 уменьшения динамической вибрации расположено с использованием данного свободного пространства.
Когда средство 251 уменьшения динамической вибрации выполнено с возможностью размещения как можно ближе к оси наконечника 219 молотка в указанном выше свободном пространстве, необходимо учитывать, что пространство является ограниченным по длине в продольном направлении (осевое направление наконечника 219 молотка) и в особенности то, что его передняя часть ограничена вертикальной ступенчатой частью. Таким образом, в этом варианте осуществления, продольная длина средства 251 уменьшения динамической вибрации уменьшена для расположения в описанном выше свободном пространстве. Конструкция средства 251 уменьшения динамической вибрации описана ниже.
Как показано на фиг.15 и 16, груз 255 средства 251 уменьшения динамической вибрации согласно этому варианту осуществления, имеет, по существу, прямоугольную блочную форму, удлиненную в горизонтальных направлениях (в продольном и поперечном направлениях). Груз 255 расположен в цилиндрическом корпусе 253 и выполнен с возможностью скольжения в продольном направлении, или в осевом направлении наконечника 219 молотка. Цилиндрический корпус 253 выполнен так, что его внутренние поверхности верхней и нижней стенки и боковой стенки соответствуют внешней форме груза 255, и груз 255 может скользить в контакте с внутренними поверхностями стенок цилиндрического корпуса 253. Цилиндрический корпус 253 выполнен за одно целое на нижнем конце кожуха 207 зубчатого редуктора и включает в себя часть 253а корпуса, имеющую открытую нижнюю часть и закрывающую часть 253b, установленную с возможностью снятия на части 253а корпуса для закрытия отверстия.
В грузе 255 образованы расположенные рядом параллельные одна задняя полость 256 размещения пружины и две передних полости 256 размещения пружин. Каждая из полостей 256 размещения пружин, передних и задней, образована внешним элементом 255а груза и удлиненным элементом 255В груза и имеет кольцевое сечение. Внешний элемент 255а груза имеет канал круглого сечения с дном, а удлиненный элемент 255В груза имеет меньший диаметр, чем канал внешнего элемента 255а груза и концентрично расположен в нем. Удлиненный элемент 255В груза имеет фланец 255Ва на осевом конце, запрессованный в канал внешнего элемента 255а груза так, что удлиненный элемент 255В груза соединяется с внешним элементом 255а груза. Задняя полость 256 размещения пружины имеет открытый задний конец и проходит вперед от заднего конца. Каждая из двух передних полостей 256 размещения пружины имеет открытый передний конец и проходит назад от переднего конца. Задняя полость 256 размещения пружины образована в середине груза 255 в поперечном направлении. Передние полости 256 размещения пружины образованы в правом и левом участке груза 255 с обеих сторон задней полости 256 размещения пружины.
Цилиндрическая пружина 257 расположена в каждой из передних полостей 256 размещения пружин. Две цилиндрические пружины 257а, 257b, имеющие различные диаметры, концентрично расположены радиально внутри и снаружи в задней полости 256 размещения пружины. Внешняя цилиндрическая пружина 257а имеет больший диаметр, чем внутренняя цилиндрическая пружина 257b. Характеристики жесткости двух передних цилиндрических пружин 257 и двух задних цилиндрических пружин 257а, 257b выбираются так, чтобы смещающие усилия двух передних цилиндрических пружин 257 и двух задних цилиндрических пружин 257, действующих на груз 255, уравновешивались. Кроме того, каждая из цилиндрических пружин 257, 257а, 257b упруго расположена между приемником 258 пружин, расположенным в цилиндрическом корпусе 253, и фланцем 255Ва удлиненного элемента 255В груза. Средство 251 уменьшения динамической вибрации, с описанной выше конструкцией расположено так, что ось или центр задней полости 256 размещения пружины располагается непосредственно под осью наконечника 219 молотка.
В средстве 251 уменьшения динамической вибрации, имеющем описанную выше конструкцию, согласно этому варианту осуществления, в котором две цилиндрические пружины 257а, 257b с разными диаметрами и большими, чем передние цилиндрические пружины 257, концентрично расположены радиально внутри и снаружи в задней полости 256 размещения пружины, причем длина задних цилиндрических пружин 257а, 257b может быть уменьшена по сравнению с конструкцией, в которой одна задняя цилиндрическая пружина установлена на месте этих двух цилиндрических пружин. Таким образом, средство 251 уменьшения динамической вибрации может быть уменьшено в продольном направлении по длине (в осевом направлении наконечника 219 молотка) с обеспечением пространства, в котором груз 255 может перемещаться в продольном направлении. Таким образом, средство 251 уменьшения динамической вибрации может быть расположено ближе к оси наконечника 219 молотка в описанном выше свободном пространстве, которое ограничено по длине в продольном направлении в нижней области кожуха 207 зубчатого редуктора.
В частности, в этом варианте осуществления, вследствие взаимного расположения с цилиндром 241, свободное пространство, в котором может быть расположено средство 251 уменьшения динамической вибрации, имеет ступенчатую переднюю область, ограниченную в вертикальном направлении. Таким образом, посредством обеспечения двух цилиндрических пружин 257а, 257b в задней полости 256 размещения пружины, передний участок груза 255 без задней полости 256 размещения пружины может быть уменьшен по толщине в вертикальном направлении. Таким образом, средство 251 уменьшения динамической вибрации может быть рационально расположено в ступенчатом свободном пространстве. Более конкретно, как показано на фиг.14 и 15, средство 251 уменьшения динамической вибрации расположено прямо под осью наконечника 219 молотка так, что его передняя область верхнего центрального участка в поперечном направлении расположена под цилиндром 241, а его задняя область верхнего центрального участка в поперечном направлении расположена в верхнем положении, ближе к оси наконечника 219 молотка, чем нижний участок цилиндра 241. Таким образом, средство 251 уменьшения динамической вибрации может быть установлено с рациональным использованием свободного пространства.
Кроме того, в средстве 251 уменьшения динамической вибрации, согласно этому варианту осуществления, три полости 256 размещения пружины расположены в одной плоскости. Таким образом, точки действия цилиндрических пружин 257, 257а, 257b, размещенных в соответствующих полостях 256 размещения пружины, расположены на одной плоскости. При такой конструкции, может предотвращаться ненужная вибрация, вызываемая в самом средстве 251 уменьшения динамической вибрации дисбалансом в двух плоскостях.
Более того, при конструкции, в которой средство 251 уменьшения динамической вибрации расположено в нижней области кожуха 207 зубчатого редуктора, средство 251 уменьшения динамической вибрации и механизм 213 преобразования движения расположены друг напротив друга на противоположных сторонах оси наконечника 219 молотка. Тем самым легко может обеспечиваться равновесие электроинструмента в вертикальном направлении.
Как показано на фиг.13 и 14, как и в описанном выше первом варианте осуществления, средство 251 уменьшения динамической вибрации имеет первую приводную камеру 261 и вторую приводную камеру 263 на передней стороне груза 255 в цилиндрическом корпусе 253. Первая приводная камера 261 на задней стороне сообщается с герметичной камерой 265 шатуна, которая обычно не сообщается с наружным пространством, посредством первой сообщающей части 261а. Вторая приводная камера 263 на передней стороне сообщается с полостью 267 размещения цилиндра кожуха 207 зубчатого редуктора, через вторую сообщающую часть 263а. Таким образом, как и в первом варианте осуществления, средство 251 уменьшения динамической вибрации выполняет не только упомянутую выше функцию пассивного уменьшения вибрации, но также служит в качестве механизма активного уменьшения вибрации принудительной вибрацией, при которой груз 255 активно перемещается. Таким образом, вибрация, вызванная в корпусе 203 во время работы ударной операции, может дополнительно эффективно уменьшаться.
Кроме того, в описанных выше вариантах осуществления, молотковый перфоратор 101 и электрический отбойный молоток 201 описаны в качестве примеров электроинструмента. Однако настоящее изобретение может также практически применяться для электроинструментов, выполняющих работу на заготовке посредством линейного перемещения наконечника инструмента, например, таких как механическая ножовка и сабельная пила, которые выполняют операцию резания заготовки посредством возвратно-поступательного перемещения полотна пилы.
Более того, в средстве 251 уменьшения динамической вибрации согласно вариантам осуществления 4-7, как и во втором варианте осуществления, груз 155 может быть образован отдельными элементами или цилиндрическим элементом 155А груза и удлиненным элементом 155В груза, и они могут быть интегрально соединены посредством запрессовки или смещения, при котором смещающие усилия цилиндрических пружин 157 действуют друг навстречу другу на груз 155. Кроме того, полости 156 размещения пружин описаны как имеющие кольцевое сечение, но они могут иметь круглую или другую полую форму.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИНСТРУМЕНТ | 2009 |
|
RU2505390C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2466854C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2010 |
|
RU2543043C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2008 |
|
RU2477211C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2009 |
|
RU2496632C2 |
| УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2008 |
|
RU2478034C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2005 |
|
RU2388590C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2510326C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| УДАРНЫЙ ИНСТРУМЕНТ | 2009 |
|
RU2544971C2 |

Изобретение относится к ударным электроинструментам. Инструмент содержит наконечник, корпус и средство уменьшения динамической вибрации. Средство уменьшения динамической вибрации содержит груз, установленный на корпусе, и упругий элемент, упруго поддерживающий груз на корпусе инструмента. Средство уменьшения динамической вибрации выполнено с возможностью уменьшения вибрации корпуса инструмента во время ударной операции посредством линейного перемещения груза. Груз выполнен цилиндрическим и имеет по меньшей мере одну окружающую его кольцевую канавку, которая проходит в осевом направлении от одного конца груза до приблизительно его середины. Один конец упругого элемента размещен в кольцевой канавке, а другой его конец расположен на корпусе. В результате уменьшается динамическая вибрация инструмента и уменьшаются габариты средства уменьшения динамической вибрации. 9 з.п. ф-лы, 16 ил.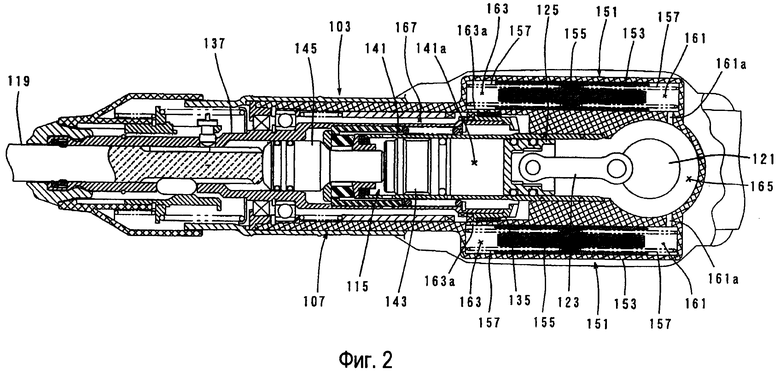
1. Электроинструмент для съемно устанавливаемого наконечника (119, 219) инструмента, выполненный с возможностью линейного перемещения установленного наконечника (119, 219) инструмента в осевом направлении для выполнения заданной операции на обрабатываемом изделии, содержащий корпус (103, 203) инструмента; и
средство (151, 251) уменьшения динамической вибрации, имеющее груз (155, 255), установленный непосредственно или посредством бокового элемента (153) корпуса на корпусе (103, 203) инструмента для линейного перемещения в осевом направлении, и упругий элемент (157, 257), упругоподдерживающий груз на корпусе инструмента непосредственно или посредством бокового элемента (153) корпуса, при этом средство уменьшения динамической вибрации выполнено с возможностью уменьшения вибрации корпуса инструмента во время ударной операции посредством линейного перемещения груза,
отличающийся тем, что груз (155, 255) имеет по меньшей мере одну кольцевую канавку (156, 256), окружающую цилиндрический сплошной удлиненный элемент и проходящую в осевом направлении от по меньшей мере одного конца груза в осевом направлении до приблизительно середины груза в осевом направлении,
причем один конец упругого элемента (157, 257) вставлен и размещен в кольцевой канавке (156, 256), а другой конец упругого элемента расположен на корпусе (103, 203) инструмента непосредственно или посредством бокового элемента корпуса.
2. Электроинструмент по п.1, в котором груз (155, 255) включает в себя первую часть (155В, 255В) и вторую часть (155А, 255А), соответственно, проходящие в осевом направлении, соединительную часть (155Ва, 255Ва), соединяющую вторую часть с первой частью, и пространство, окруженное первой и второй частями и соединительной частью, при этом пространство образует кольцевую канавку (156, 256), а первая часть и вторая часть образованы отдельными элементами.
3. Электроинструмент по п.2, в котором первая часть и вторая часть выполнены из разных материалов.
4. Электроинструмент по п.1, в котором груз имеет первую кольцевую канавку, проходящую от одного конца к другому концу груза в осевом направлении, и вторую кольцевую канавку, проходящую от другого конца к одному концу в осевом направлении.
5. Электроинструмент по п.1, дополнительно содержащий
приводной электродвигатель (211), расположенный на оси установленного наконечника (219) инструмента в корпусе (203) инструмента так, что его ось вращения пересекает осевое направление, и
часть (213) приводного механизма, расположенную в корпусе инструмента и служащую для преобразования выходной мощности вращения приводного электродвигателя в линейное перемещение и приведения в действие установленного наконечника (219) инструмента по меньшей мере линейно в осевом направлении,
при этом средство (251) уменьшения динамической вибрации и часть (213) приводного механизма расположены напротив друг друга на противоположных сторонах оси установленного наконечника (219) инструмента.
6. Электроинструмент по п.1, в котором упругий элемент содержит цилиндрические пружины (157, 257), каждая из которых расположена коаксиально в кольцевой канавке груза (155, 255).
7. Электроинструмент по п.6, в котором каждая цилиндрическая пружина имеет различный диаметр.
8. Электроинструмент по п.1, в котором груз имеет по меньшей мере три кольцевых канавки, расположенных на одной плоскости.
9. Электроинструмент по п.2, в котором первая часть (155В, 255В) запрессована во вторую часть (155А, 255А) и тем самым интегрально соединена со второй частью.
10. Электроинструмент по п.2, в котором первая часть (155В, 255В) свободно установлена во второй части (155А, 255А), при этом первая часть и вторая часть выполнены с возможностью взаимодействия друг с другом посредством соответствующих взаимодействующих поверхностей, образованных в направлении, перпендикулярном направлению введения первой части, и в состоянии взаимодействия первая часть и вторая часть интегрально соединены друг с другом смещающими усилиями упругого элемента, действующими друг к другу на первую часть и вторую часть.
| ЕР 1736283 А2, 27.12.2006 | |||
| US 2875731 A, 03.03.1959 | |||
| WO 03018342 А2, 06.03.2003 | |||
| DE 29505125 U1, 29.06.1995 | |||
| Виброгасящее устройство для ручного перфоратора | 1980 |
|
SU962604A2 |

