Область техники, к которой относится изобретение
Изобретение относится к способу управления тормозной системой рабочей машины и к тормозной системе для рабочей машины в соответствии с ограничительными частями независимых пунктов формулы изобретения.
Уровень техники
Рабочие машины, к которым относится строительное оборудование или строительные транспортные средства, например, экскаваторы или колесные автопогрузчики, представляют собой транспортные средства, предназначенные для использования и используемые на пересеченной местности, где не могут проехать обычные грузовые или пассажирские автомобили, или же если они все-таки будут двигаться в таких условиях, то скорее всего будут повреждены.
На рабочих машинах, таких как, например, колесные экскаваторы, используются стояночные тормоза, а также рабочие тормоза, например, тормоза, используемые, когда рабочая машина останавливается для выполнения рабочих операций, например, для выемки грунта (земляные работы). Стояночные тормоза задействуют, когда транспортное средство останавливается в ситуации, не связанной с выполнением рабочих операций. На традиционных рабочих машинах, чтобы полностью задействовать рабочие тормоза, необходимо утопить в пол педаль этих тормозов. Для выключения рабочих тормозов необходимо отпустить ранее утопленную в пол тормозную педаль. Для того чтобы отпустить педаль рабочего тормоза, ее необходимо утопить еще глубже с увеличенным усилием, и после этого педаль освобождается.
В документе ЕР 0989039 В1 раскрывается колесный экскаватор с тормозной системой, в состав которой входят рабочие и стояночные тормоза на каждом колесе. Рабочие тормоза находятся под управлением автоматической тормозной системы, в которой используется гидравлическая система, содержащая клапан, управляемый блоком управления. Клапан независимо задействует тормоза при нажатии тормозной педали, когда включена автоматическая тормозная система. Например, рабочие тормоза могут быть активированы, если скорость рабочей машины равна нулю, и педаль акселератора отпущена. Автоматическая тормозная система может быть включена или выключена с помощью привода. В системе используются входные сигналы, представляющие намерения водителя, например, положения педалей тормоза и акселератора. В системе обеспечиваются выходные сигналы для одновременного управления рабочими тормозами и стояночными тормозами, а также блокировочным устройством поворотной оси. Тормозная система включается только в том случае, когда работает гидравлический насос гидравлической системы.
Раскрытие изобретения
Целью изобретения является создание тормозной системы для рабочей машины, в частности для колесного экскаватора, в которой обеспечивается комфортное и безопасное управление рабочими тормозами. Другой целью изобретения является обеспечение способа управления тормозной системой.
Указанные цели изобретения достигаются с использованием признаков независимых пунктов формулы изобретения. Другие пункты формулы изобретения и описание раскрывают предпочтительные варианты осуществления изобретения.
В изобретении предлагается способ управления тормозной системой рабочей машины, содержащей по меньшей мере один рабочий тормоз, действующий непосредственно или опосредованно по меньшей мере на один взаимодействующий с поверхностью земли элемент рабочей машины, по меньшей мере один привод рабочего тормоза, а также привод акселератора для активации поступательного движения рабочей машины. Привод рабочего тормоза выполнен с возможностью перемещения между полностью включенным положением (полного действия) и полностью выключенном положении (нулевого действия). В состоянии активации тормозной системы привод рабочего тормоза автоматически перемещается в полностью включенное положение, когда освобождается привод акселератора. В частности, включение (приведение в действие) и выключение (освобождение) указанного по меньшей мере одного рабочего тормоза может осуществляться давлением жидкости в гидравлической системе, управление которой осуществляется электронным блоком управления транспортного средства. Более конкретно, привод рабочего тормоза может быть соединен механически по меньшей мере с одним гидравлическим цилиндром и может автоматически перемещаться поршнем гидравлического цилиндра вместо перемещения его оператором.
В изобретение также предлагается тормозная система для рабочей машины, содержащая по меньшей мере один рабочий тормоз, действующий непосредственно или опосредованно по меньшей мере на один взаимодействующий с поверхностью земли элемент рабочей машины, привод рабочего тормоза, выполненный с возможностью перемещения между полностью включенным положением и полностью выключенном положении, а также привод акселератора для активации поступательного движения рабочей машины. В состоянии активации тормозной системы привод рабочего тормоза автоматически перемещается в полностью включенное положение, когда освобождается привод акселератора.
Привод рабочего тормоза в автоматическом режиме действия рабочих тормозов, когда рабочие тормоза действуют автоматически, работает уже не как привод, а только как индикатор того, что тормоза приводятся автоматически в положение срабатывания, поскольку система в этом режиме осуществляет автоматическое управление рабочими тормозами. В предпочтительном варианте привод рабочего тормоза может управлять с рабочими тормозами или может быть функционально связан с ними для включения их в его полностью включенном положении и освобождения их в его полностью выключенном положении.
В этом случае повышается удобство работы оператора, поскольку без вмешательства оператора обеспечивается автоматический режим действия рабочих тормозов, в котором привод рабочего тормоза автоматически переводится в полностью включенное положение, когда освобождается привод акселератора, и также автоматически переводится в полностью выключенное положение, когда привод акселератора приводится в действие. Например, оператор может задать один из нескольких режимов, таких как рабочий режим, режим пользователя, стояночный режим, режим движения и т.п. Рабочий режим и режим пользователя предпочтительно может включать автоматический режим действия рабочих тормозов. После задания соответствующего режима работы, например, рабочего режима, режима пользователя или другого режима, автоматический режим действия рабочих тормозов может быть активирован приводом, например, кнопочным переключателем или другим средством. Автоматический режим действия рабочих тормозов может быть выбран, например, для выполнения земляных работ, которые требуют надежной блокировки элементов, взаимодействующих с поверхностью земли, особенно на наклонной поверхности. Элементами, взаимодействующими с поверхностью земли, могут быть колеса, гусеницы и другие, им подобные, устройства. В автоматическом режиме действия рабочих тормозов предпочтительно рабочий тормоз может активироваться, как только освобождается привод акселератора, и рабочая машина неподвижна.
Кроме того, что повышается удобство работы оператора на рабочей машине, состояние рабочего тормоза может быть легко определено визуально по положению привода рабочего тормоза. Оператор, взглянув на привод рабочего тормоза, всегда может узнать состояние рабочего тормоза (включен или выключен).
Приводом рабочих тормозов может быть педаль, рычаг, скользящий элемент или другое, им подобное, устройство. Аналогично, приводом акселератора может быть педаль, рычаг, скользящий элемент или им подобное устройство. Поскольку привод рабочего тормоза автоматически перемещается в его полностью включенное положение, когда включен рабочий тормоз и активен автоматический режим действия рабочих тормозов, то оператор может легко определить визуально состояние рабочего тормоза. Таким образом, оператор может управлять рабочей машиной, задав автоматический режим действия рабочих тормозов или выключив его. В обоих случаях привод рабочего тормоза будет в одном и том же положении, когда рабочий тормоз будет включен. Например, если приводом рабочих тормозов является педаль, то она будет в нажатом положении, когда рабочий тормоз включен.
В предпочтительном варианте осуществления изобретения, когда тормозная система активирована, указанный по меньшей мере один привод рабочего тормоза может перемещаться автоматически в полностью включенное положение только в том случае, когда рабочая машина неподвижна или двигается со скоростью, не превышающей заданное пороговое значение. Предпочтительно привод рабочего тормоза может перемещаться автоматически в положение включения под действием приводного устройства. В этом случае транспортное средство может двигаться с некоторой "остаточной" скоростью, например, 1-5 км/час, когда привод рабочего тормоза уже может быть включен, и, таким образом, рабочая машина может быстрее остановиться за счет действия включенных рабочих тормозов.
В одном из предпочтительных вариантов приводное устройство, предпочтительно клапанное устройство (содержащее клапан), может иметь первое рабочее состояние и второе рабочее состояние. Первое рабочее состояние соответствует положению приведенного в действие привода акселератора. Второе рабочее состояние соответствует положению освобожденного привода акселератора, в котором он не оказывает действия на заслонку. Во втором рабочем состоянии приводного устройства на указанный по меньшей мере один рабочий тормоз может быть подано приводным устройством высокое давление гидравлической жидкости, которое приводит этот рабочий тормоз в действие для блокировки по меньшей мере одного элемента рабочей машины, взаимодействующего с поверхностью земли. В зависимости от текущего рабочего состояния привода акселератора рабочий тормоз может быть автоматически приведен в действие или выключен без вмешательства оператора, работа которого в этом случае сводится только к манипуляциям с приводом акселератора. В соответствии с предпочтительным вариантом приводное устройство может перемещать привод рабочего тормоза в его полностью включенное положение, когда приводное устройство находится во втором рабочем состоянии, без вмешательства оператора.
В соответствии с другим вариантом может быть обеспечен элемент для перемещения привода рабочего тормоза обратно в полностью выключенное положение, если приводное устройство находится в первом рабочем состоянии. Таким элементом может быть, например, разжимная пружина, которая толкает привод рабочего тормоза обратно в его полностью выключенное положение, когда указанный по меньшей мере один рабочий тормоз разблокирует указанный по меньшей мере один взаимодействующий с поверхностью земли элемент.
Приводное устройство в его первом рабочем состоянии может подавать на указанный по меньшей мере один рабочий тормоз низкое давление гидравлической жидкости, величина которого ниже высокого давления, обеспечивающего приведение в действие этого рабочего тормоза. В рабочей машине, такой как колесный экскаватор, величина низкого давления не превышает несколько бар. Например, в одном из вариантов давление гидравлической жидкости на приводе акселератора может составлять примерно 2 бара и даже меньше, когда этот привод не приведен в действие, то есть, когда приводное устройство находится во втором рабочем состоянии. В этом случае на рабочий тормоз подается высокое давление гидравлической жидкости, и привод рабочего тормоза автоматически перемещается в полностью включенное положение. Давление гидравлической жидкости (рабочее давление), которое приводит в действие указанный по меньшей мере один рабочий тормоз, может составлять несколько десятков бар, например, 65 бар и более.
В предпочтительном варианте в первом рабочем состоянии приводного устройства привод акселератора находится в положении действия, привод рабочего тормоза находится в освобожденном положении, и на указанный по меньшей мере один рабочий тормоз подается низкое давление гидравлической жидкости, в результате чего он будет выключен, Во втором рабочем состоянии приводного устройства привод акселератора находится в освобожденном положении, привод рабочего тормоза находится в положении действия, и на указанный по меньшей мере один рабочий тормоз подается высокое давление гидравлической жидкости, в результате чего он будет включен.
Привод рабочего тормоза может быть заперт в его полностью включенном положении с помощью механического, электромеханического или гидравлического привода, и такое запирание предпочтительно может осуществляться с помощью выдвижной защелки, которая запирает привод рабочего тормоза в полностью включенном положении. Однако оператор может управлять рабочей машиной и без включения автоматического режима рабочих тормозов, поскольку можно использовать запирающее устройство для надежной фиксации привода рабочего тормоза.
Может быть обеспечен привод для задания одного или нескольких режимов рабочей машины, причем по меньшей мере один режим является автоматическим режимом действия рабочих тормозов, активирующим указанный по меньшей мере один рабочий тормоз тормозной системы.
Предпочтительно обеспечивается дисплей, на котором отображается заданный режим и/или состояние автоматического режима действия рабочих тормозов. Кроме того, на дисплее может отображаться также информация об отказе или о состоянии автоматического режима действия рабочего тормоза.
Краткое описание чертежей
Настоящее изобретение вместе с вышеупомянутыми и другими его целями и достоинствами можно будет лучше всего понять из нижеприведенного подробного описания вариантов осуществления изобретения, которые не ограничивают его объем, со ссылками на чертежи, на которых показано:
фиг.1а, 1б - схема гидравлической системы рабочего тормоза в соответствии с предпочтительным вариантом осуществления изобретения, причем рабочий тормоз показан в выключенном положении (фиг.1а) и во включенном положении (1б);
фиг.2 - блок-схема алгоритма передачи сигналов в системе в соответствии с предпочтительным вариантом осуществления изобретения.
Осуществление изобретения
На чертежах одинаковые или сходные элементы указываются одинаковыми ссылочными номерами. Чертежи являются всего лишь схематическими иллюстрациями, не предназначенными для точного отображения конкретных характеристик изобретения. Кроме того, чертежи предназначены для представления только типичных вариантов осуществления изобретения и поэтому не должны рассматриваться как ограничивающие объем изобретения.
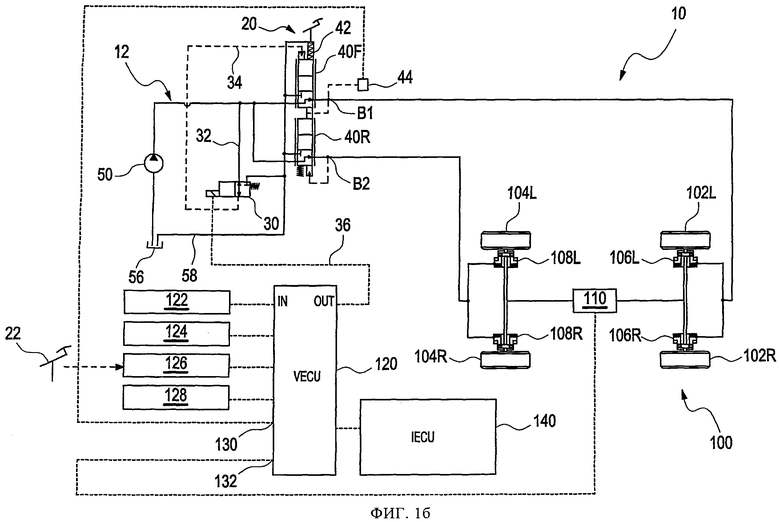
На фиг.1а и 1б представлен вариант тормозной системы 10 в соответствии с изобретением для рабочей машины 100, содержащей рабочий тормоз с приводом 20 рабочего тормоза в выключенном (фиг.1а) и во включенном (фиг.1б) положениях. Гидравлическая система 12 изображена в упрощенной форме, поскольку гидравлические схемы тормозных систем хорошо известны в технике. На фигурах показаны только основные компоненты гидравлической системы 12 в соответствии с изобретением.
В рассматриваемом варианте рабочая машина 100 (показана в упрощенном виде: колеса с колесными тормозами, коробка 110 передач и два электронных блока 120, 140 управления) содержит четыре колеса в качестве взаимодействующих с поверхностью земли элементов 102L, 102R, 104L, 104R и установленных попарно на две колесные оси, причем каждый из элементов 102L, 102R, 104L, 104R снабжен рабочим тормозом 106L, 106R, 108L, 108R, действующим непосредственно или опосредованно на элементы 102L, 102R, 104L, 104R.
Тормозная система 10 содержит гидравлическую систему 12 с гидравлическим клапаном 40F, например, клапаном 3/3, где указание 3/3 относится к клапану, имеющему 3 канала и 3 рабочих положения, для рабочих тормозов 106L, 106R, действующих на взаимодействующие с поверхностью земли элементы 102L, 102R на первой оси и гидравлическим клапаном 40R, например, клапаном 3/3, для рабочих тормозов 108L, 108R, действующих на взаимодействующие с поверхностью земли элементы 104L, 104R на второй оси. Два клапана 40F и 40R соединены между собой (показано сплошной соединительной линией между этими клапанами 40F, 40R). Клапаны 40R и 40F гидравлически соединены с каналами В1 и В2, соответственно, через которые гидравлическая жидкость действует на золотники клапанов, причем гидравлическое соединение клапана к каналу В2 показано только для клапана 40R и указано для клапана 40F пунктирной линией от канала В1 к соединительной линии между двумя клапанами 40R, 40F. На клапане 40R имеется возвратная пружина, общая для обоих клапанов 40R, 40F. Клапаны 40R, 40F работают под действием давления в гидравлической линии 34 управления. Таким образом, золотник может быть уравновешен: когда золотник "не задействован", гидравлическая жидкость из клапанов 40R, 40F стекает в резервуар 56 (через золотник). Когда золотник "задействован", на привод 20 тормоза будет действовать сила, пропорциональная выходному давлению, для создания соответствующего ощущения. Чем больше ход педали, которую нажимает оператор, тем сильнее он должен нажимать на эту педаль.
Гидравлический клапан 40F подает гидравлическую жидкость через канал В1 на рабочие тормоза 106L, 106R взаимодействующих с поверхностью земли элементов 102L, 102R первой оси. Гидравлический клапан 40R подает гидравлическую жидкость через канал В2 на рабочие тормоза 108L, 108R взаимодействующих с поверхностью земли элементов 104L, 104R второй оси.
В системе используется приводное устройство 30, предпочтительно содержащее клапан и выполненное в одном из вариантов в форме электромагнитного соленоидного клапана (клапан 3/2, 3 канала и 2 положения), которое управляет рабочим состоянием клапанов 40F и 40R гидравлической системы 12, которая будет описана ниже более подробно.
Приводным устройством 30 предпочтительно управляет электронный блок управления транспортного средства ("VECU") 120 по сигнальной линии 36 управления. Блок VECU 120 принимает входные сигналы от управляющего рычага 122 блокировки, задающего переключателя 124, включающего/выключающего автоматический режим действия рабочих тормозов, от датчика 126 привода 22 акселератора, например, от педали газа, от переключателя 128 задания режима, который обеспечивает выбор одного из режимов работы рабочей машины 100, например, режим движения, режим стоянки, рабочий режим или режим, определяемый пользователем, а также входной сигнал 130 от датчика 44 давления тормоза, подсоединенного к каналу В1 гидравлической системы 12 и входной сигнал 132 от датчика скорости (не показан), который соединен с коробкой 110 передач рабочей машины 100. Управляющий рычаг 122 блокировки представляет собой рычаг, который обычно расположен на приборной панели рабочей машины 100 и может быть задействован оператором, когда он находится на рабочей машине 100. Когда оператор выходит из рабочей машины 100, управляющий рычаг 122 блокировки не задействован, и гидравлическая система принудительно отключается. Автоматический режим действия рабочих тормозов задается, если (а) переключатель 128 задания режимов установлен в один из нескольких режимов, например, в режим выполнения земляных работ, который предусматривает использование режима автоматического торможения, и (б) переключатель 124 установлен в положение автоматического режима действия рабочих тормозов.
Приводной клапан 30 управляет работой клапанов 40F, 40R по гидравлической линии 34 управления, в то время как сам приводной клапан 30 с электрическим управлением получает сигналы управления от блока VECU 120 по сигнальной линии 36.
Для измерения давления в обоих контурах тормозов 106L, 106R и 108L, 108R передней и задней пар взаимодействующих с поверхностью земли элементов 102L, 102R и 104L, 104R, соответственно, требуется только один датчик 44 давления.
Привод 20 рабочего тормоза, например, тормозная педаль, механически соединен по меньшей мере с одним из клапанов 40F, 40R гидравлической системы 12. В частности, привод 20 рабочего тормоза может быть соединен с цилиндром клапана 40F и/или 40R. Когда гидравлическая жидкость создает давление в соответствующем цилиндре каждого клапана 40F, 40R, это вызывает установку клапанов 40F, 40R в нужное положение. Если приводом 20 рабочего тормоза является тормозная педаль, то может обеспечиваться золотниковый клапан, который функционально соединен по меньшей мере с одним из клапанов 40F, 40R, причем ход золотникового клапана будет максимальным, когда тормозная педаль (привод 20 рабочего тормоза) утоплена в пол в положение включения тормозов (фиг.1б). В частности, золотниковый клапан может быть механически соединен с одним из цилиндров клапанов 40F, 40L и будет автоматически перемещаться вместе с соответствующим цилиндром.
Насос 50 перекачивает гидравлическую жидкость из резервуара 56, находящуюся в нем под низким давлением, например, 2 бара и ниже, создавая повышенное (рабочее) давление гидравлической жидкости. В зависимости от типа рабочей машины это повышенное давление может быть примерно 65 бар и выше. Обычно это повышенное давление является нормальным рабочим давлением гидравлической тормозной системы 12, обеспечивающим срабатывание тормозов.
В выключенном положении гидравлических клапанов 40F, 40R, как это показано на фиг.1а, они соединены гидравлически с резервуаром 56, и в гидравлических линиях будет низкое давление, имеющееся в резервуаре 56. Каналы В1 и В2, а также гидравлическая линия 34 управления (по линии 58) между приводным устройством 30 и клапанами 40F, 40R соединены с резервуаром 56. Приводное устройство 30, предпочтительно выполненное в форме соленоидного клапана, электрически соединено по сигнальной линии 36 с блоком VECU 120, который передает по этой линии сигналы управления клапаном в соответствии с сигналами, получаемыми от переключателя 128 задания режима и/или от датчика 126 привода акселератора и/или от давления тормозов, обеспечиваемого датчиком 44. Это рабочее состояние приводного устройства 30, показанное на фиг.1а, является его первым рабочим состоянием. Привод 20 рабочего тормоза находится в отпущенном положении, и рабочие тормоза 106L, 106R, 108L, 108R также отпущены (выключены). Может быть задействован привод 22 акселератора, в результате чего транспортное средство начинает движение.
В другом варианте приводное устройство 30 может быть также соединено с другой гидравлической системой, если она имеется, вместо запитывания от насоса 50, как и вся тормозная система.
Гидравлический клапан 40F подает гидравлическую жидкость по каналу В1 на рабочие тормоза 106L, 106R взаимодействующих с поверхностью земли элементов 102L, 102R первой оси. Гидравлический клапан 40R подает гидравлическую жидкость по каналу В2 на рабочие тормоза 108L, 108R взаимодействующих с поверхностью земли элементов 104L, 104R второй оси. Поскольку в выключенном состоянии в гидравлической системе 12 действует низкое давление жидкости, имеющейся в резервуаре, рабочие тормоза 106L, 106R и 108L, 108R отпущены, и взаимодействующие с поверхностью земли элементы 102L, 102R и 104L, 104R свободны (не заблокированы). Привод 20 рабочего тормоза находится в отпущенном положении.
Во включенном состоянии соленоидного клапана (приводное устройство 30), показанном на фиг.1б, соленоидный клапан (приводное устройство 30) подает в каналы В1 и В2 высокое давление, создаваемое насосом 50, и гидравлические клапаны 40F и 40R смещаются соответствующим образом. Гидравлическая жидкость под высоким давлением заставляет рабочие тормоза 106L, 106R и 108L, 108R воздействовать на взаимодействующие с поверхностью земли элементы 102L, 102R и 104L, 104R, и рабочая машина 100 не будет двигаться (блокируется). Это состояние приводного устройства 30 является его вторым рабочим состоянием, в котором привод 20 рабочего тормоза находится в положении включения, и рабочие тормоза 106L, 106R, 108L, 108R также включены, если активирована автоматическая тормозная система. Гидравлическая линия 34 управления (по линии 32) между приводным устройством 30 и клапанами 40F, 40R обеспечивает высокое давление гидравлической жидкости, создаваемое насосом 50.
Одновременно привод 20 рабочего тормоза автоматически перемещается в свое полностью включенное положение (например, тормозная педаль полностью утоплена), поскольку он имеет механическое соединение с цилиндром по меньшей мере одного из клапанов 40F, 40R. Когда привод 20 рабочего тормоза находится в полностью включенном положении, он может быть зафиксирован в этом положении с помощью прикрепленной к нему выдвижной защелки, которая обеспечивает фиксацию в течение всего необходимого времени.
С блоком VECU 120 соединен контрольно-измерительный электронный блок 140 управления (IECU). В предпочтительном варианте блок IECU 140 снабжен дисплеем. Дисплей обеспечивает отображение оператору информации о заданном режиме работы и о состоянии рабочих тормозов.
Из соображений наглядности представления информации на фиг.1б подробно показаны только те части клапанов 40F, 40R и 30, которые активируются. Другие части клапанов 40F, 40R и 30 показаны более подробно на фиг.1а.
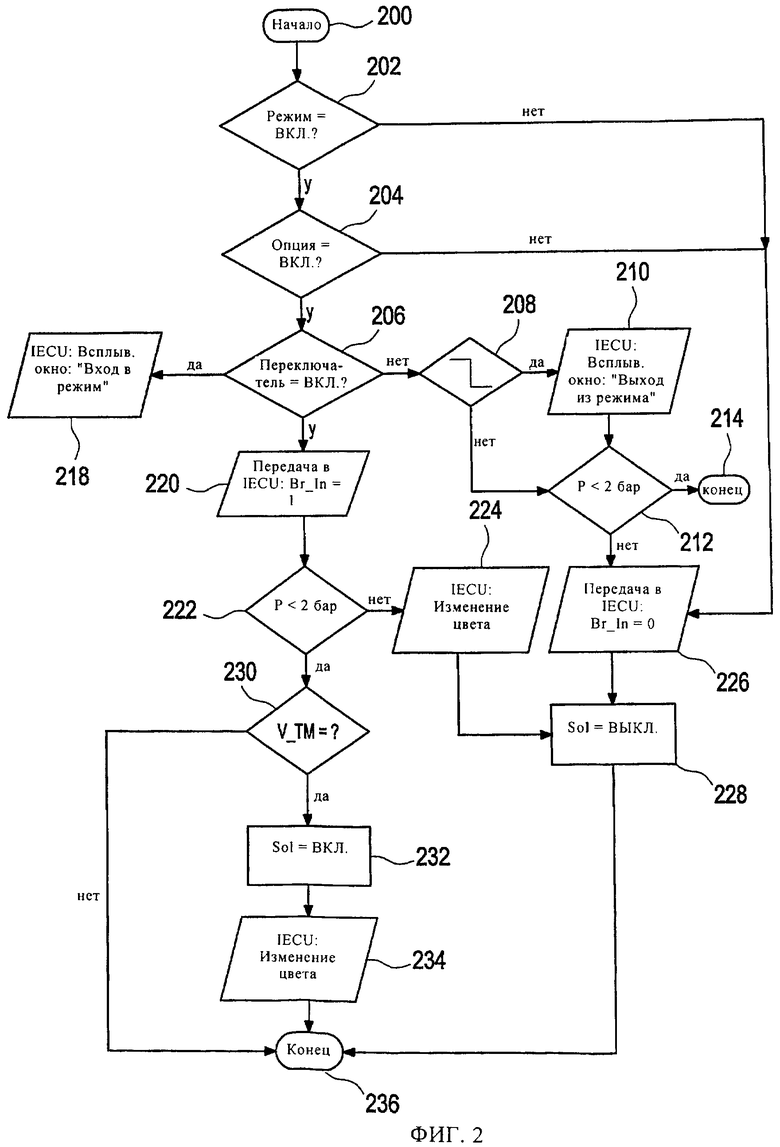
На фиг.2 представлена блок-схема алгоритма передачи сигналов в системе в соответствии с предпочтительным вариантом осуществления изобретения. Для примера рассмотрен режим выполнения земляных работ, в котором используется автоматический режим действия рабочих тормозов ("режим торможения при проведении земляных работ"), и рабочий тормоз - это тормоз, обеспечивающий проведение земляных работ, который активируется, когда рабочая машина останавливается, и взаимодействующие с поверхностью земли элементы надежно блокируются. Приводное устройство 30 (фиг.1а, 1б) может быть, например, соленоидным клапаном, управляемым электрическим током, протекающим через соленоид.
Алгоритм передачи сигналов начинается на стадии 200, когда, например, рабочую машину включают. На стадии 202 проверяется включение режима работы, причем, в порядке примера, два имеющихся режима W (рабочий режим) и С (пользовательский режим) могут обеспечивать автоматический режим действия рабочих тормозов.
Если результатом проверки на стадии 202 является ответ "Нет", то признак Br_In (индикация торможения при выполнении земляных работ) устанавливается в нуль, и информация об этом значении признака Br_In передается в контрольно-измерительный электронный блок управления (IECU) 140 (фиг.1а, 1б) на стадии 226, и электрический сигнал Sol соленоида приводного устройства 30 (фиг.1а) устанавливается в положение "Выкл." на стадии 228 (сигнал торможения при выполнении земляных работ). Выполнение алгоритма заканчивается на следующей стадии 236.
Если результатом проверки на стадии 202 является ответ "Да", то на стадии 206 проверяется, находится ли переключатель торможения при выполнении земляных работ в положении "Вкл.", то есть включен ли автоматический режим при выполнении земляных работ. Если результатом проверки является ответ "Нет", то на стадии 208 проверяется наличие заднего фронта электрического сигнала переключателя, то есть, автоматический режим при выполнении земляных работ был только что выключен. Если результатом проверки на стадии 208 является ответ "Да", то на стадии 210 в блок IECU 140 передается информация о состоянии автоматического режима при выполнении земляных работа, и на дисплее блока IECU 140 может индицироваться, например, с использованием всплывающего окна, сообщение о том, что произошел выход из автоматического режима торможения при выполнении земляных работ, и, соответственно, автоматическое торможение при выполнении земляных работ выключено. На следующей стадии 212 проверяется, находится ли величина давления Р привода акселератора (22 на фиг.1а, 1б) ниже порогового уровня давления, например, ниже 2 бар. Если результатом проверки является ответ "Да", выполнение алгоритма заканчивается на стадии 214. Если же результатом проверки является ответ "Нет", то в блок IECU 140 (фиг.1а, 1б) на стадии 226 передается информация о том, что электрический сигнал Br_In о торможении при выполнении земляных работ установлен в состояние "0", и на стадии 228 электрический сигнал Sol соленоида приводного устройства 30 (фиг.1а) устанавливается в положение "Выкл.". Выполнение алгоритма заканчивается на следующей стадии 236.
Если электрический сигнал переключателя торможения при выполнении земляных работ не имеет заднего фронта (ответ "Нет" на стадии 208), то на следующей стадии 212 проверяется, находится ли величина давления Р привода акселератора (22 на фиг.1а, 1б) ниже порогового уровня давления, например, ниже 2 бар. Если результатом проверки является ответ "Да", выполнение алгоритма заканчивается на стадии 214. Если же результатом проверки является ответ "Нет", то в блок IECU 140 (фиг.1а, 1б) на стадии 226 передается информация о том, что электрический сигнал Br_In о торможении при выполнении земляных работ установлен в состояние "О", и на стадии 228 электрический сигнал Sol соленоида приводного устройства 30 (фиг.1а) устанавливается в положение "Выкл.". Выполнение алгоритма заканчивается на следующей стадии 236.
На стадии 204 между стадиями 202 и 206 проверяется, установлен или нет в рабочей машине 100 режим автоматического торможения при выполнении земляных работ ("Опция"). Если этот режим не задан (ответ "Нет" на стадии 204), то выполнение алгоритма продолжается на стадии 226. Если этот режим задан (ответ "Да" на стадии 204), то выполнение алгоритма продолжается на стадии 206.
Если на стадии 206 обнаружено, что электрический переключатель торможения при выполнении земляных работ задействован ("Да" на стадии 206), то сигнал Br_In о торможении при выполнении земляных работ устанавливается в состояние "1", и в блок IECU 140 (фиг.1а, 1б) на стадии 220 передается информация о том, что сигнал Br_In о торможении при выполнении земляных работ установлен в состояние "1". Может обеспечиваться отображение на дисплее, соединенном с блоком IECU 140, всплывающего окна, которое должно появляться на небольшое время, например, на 5 секунд, после активации или деактивации переключателя торможения при выполнении земляных работ. На стадии 218 блок IECU 140 (фиг.1а, 1б) активирует, например, всплывающее окно на дисплее для отображения информации типа "вход в режим торможения при выполнении земляных работ" для извещения оператора о том, что транспортное средство переходит в автоматический режим при выполнении земляных работ, если переключатель торможения при выполнении земляных работы активируется, и в электрическом сигнале переключателя обнаружен передний фронт.
На стадии 222 после стадии 220 проверяется, находится ли величина давления Р привода акселератора (22 на фиг.1а, 1б) ниже порогового уровня давления, например, ниже 2 бар. Если получен ответ "Нет", то на стадии 224 блок IECU 140 (фиг.1а, 1б) обеспечивает изменение цвета указателя Br_In торможения при выполнении земляных работ, например, на зеленый цвет, и на стадии 228 электрический сигнал Sol соленоида устанавливается в положение "Выкл.". Зеленый цвет в этом случае будет указывать на то, что задан режим земляных работ, однако рабочий тормоз не задействован. Это может произойти, например, когда рабочая машина двигается, и рабочий тормоз автоматически отпускается, то есть, рабочая машина еще находится в рабочем режиме (или в режиме пользователя) и должна переместиться из рабочей позиции А в рабочую позицию В, находящуюся поблизости, и оператор решает не выключать режим земляных работ при перемещении из позиции А в позицию В. Конечно, могут использоваться другие цвета или другие подходящие средства для доведения этой информации до сведения оператора.
Если давление Р привода акселератора (22 на фиг.1а, 1б) ниже порогового значения (ответ "Да" на стадии 222 фиг.2), то на стадии 230 проверяется, указывает ли сигнал V_TM скорости, поступающий из коробки 110 передач (фиг.1а, 1б), на то, что рабочая машина неподвижна или двигается со скоростью, не превышающей заданного порогового значения, например, 5 км/час. Если результатом проверки является ответ "Нет", выполнение алгоритма заканчивается на стадии 236. Если получен ответ "Да", то на стадии 232 электрический сигнал Sol соленоида устанавливается в положение "Вкл.", и блок IECU 140 (фиг.1а, 1б) обеспечивает изменение цвета указателя Br_In торможения при выполнении земляных работ, например, на желтый цвет для указания оператору того, что включен автоматический режим действия рабочих тормозов. Выполнение алгоритма заканчивается на стадии 236. Конечно, могут использоваться другие цвета или другие подходящие средства для доведения этой информации до сведения оператора.
В предпочтительном варианте автоматический режим торможения при выполнении земляных работ и/или автоматическое торможение при выполнении земляных работ включается только в том случае, если гидравлическая система функционирует нормально, и имеется достаточное давления для выполнения торможения. Тормозная система обеспечивает удобство работы для оператора, уменьшая необходимый объем его непосредственного взаимодействия с тормозной системой за счет использования автоматического режима, который не требует вмешательства оператора для манипуляций с приводом рабочих тормозов. При этом облегчается управление рабочей машиной, и повышается безопасность работы, поскольку оператор может сконцентрироваться на выполнении рабочих операций.
Изобретение предназначено для управления тормозной системой колесного экскаватора, колесного автопогрузчика. В состоянии активации тормозной системы (100) включают привод (20) рабочего тормоза посредством изменения давления жидкости в гидравлической системе (12), управляемой электронным блоком (120) управления транспортного средства. Привод (20) рабочего тормоза перемещают автоматически в полностью включенное положение, когда освобожден привод (22) акселератора. Достигается повышение безопасности управления экскаватором, эргономичности управления экскаватором. 2 н. и 14 з.п. ф-лы, 3 ил.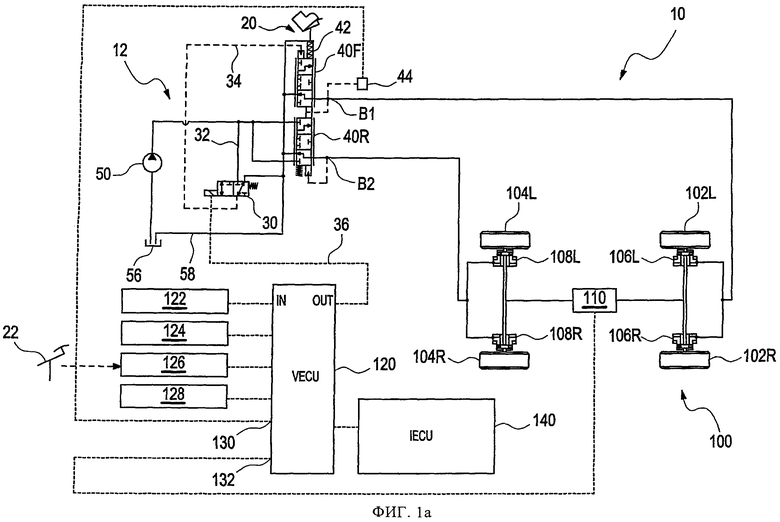
1. Способ управления тормозной системой (10) рабочей машины (100), содержащей, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R), действующий непосредственно или опосредованно, по меньшей мере, на один взаимодействующий с поверхностью земли элемент (102L, 102R, 104L, 104R) рабочей машины (100), и, по меньшей мере, один привод (20) рабочего тормоза, выполненный с возможностью перемещения между полностью включенным положением и полностью выключенным положением, а также привод (22) акселератора для активации поступательного движения рабочей машины (100), отличающийся тем, что в состоянии активации тормозной системы (10), указанный, по меньшей мере, один привод (20) рабочего тормоза включается и выключается давлением жидкости в гидравлической системе (12), управляемой электронным блоком (120) управления транспортного средства, и указанный, по меньшей мере, один привод (20) рабочего тормоза перемещается автоматически в полностью включенное положение, когда освобожден привод (22) акселератора.
2. Способ по п.1, отличающийся тем, что в состоянии активации тормозной системы (10) указанный, по меньшей мере, один привод (20) рабочего тормоза перемещается автоматически в полностью включенное положение только в том случае, когда рабочая машина (100) неподвижна или двигается со скоростью, не превышающей заданное пороговое значение.
3. Способ по п.1, отличающийся тем, что в нем используют приводное устройство (30), предпочтительно клапанное устройство, которое может находиться в первом рабочем состоянии или во втором рабочем состоянии, причем первое рабочее состояние соответствует положению приведенного в действие привода (22) акселератора, а второе рабочее состояние соответствует освобожденному положению привода (22) акселератора, в котором он не оказывает действия, и на указанный по меньшей мере один рабочий тормоз (106L, 106R, 108L, 108R) приводным устройством (30), предпочтительно клапанным устройством, может быть подано давление гидравлической жидкости, приводящее в действие указанный, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R) для блокировки указанного, по меньшей мере, одного взаимодействующего с поверхностью земли элемента (102L, 102R, 104L, 104R) рабочей машины (100) в том случае, когда на указанный по меньшей мере один рабочий тормоз (106L, 106R, 108L, 108R) приводным устройством (30) подается гидравлическое давление для приведения в действие указанного по меньшей мере одного рабочего тормоза (106L, 106R, 108L, 108R).
4. Способ по п.3, отличающийся тем, что привод (20) рабочего тормоза находится в полностью включенном положении, когда приводное устройство (30), предпочтительно клапанное устройство, находится во втором рабочем состоянии, и привод (20) рабочего тормоза возвращается в полностью выключенное положение, когда приводное устройство (30) находится в первом рабочем состоянии.
5. Способ по п.3, отличающийся тем, что когда приводное устройство (30), предпочтительно клапанное устройство, находится в первом рабочем состоянии, на указанный, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R) подается давление гидравлической жидкости, величина которого ниже величины давления, приводящего в действие указанный, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R).
6. Способ по одному из предыдущих пунктов, отличающийся тем, что привод (20) рабочего тормоза механически, электромеханически или гидравлически запирается в полностью включенном положении, и такое запирание осуществляется предпочтительно с помощью выдвижной защелки, которая запирает привод (20) рабочего тормоза в полностью включенном положении.
7. Тормозная система (10) рабочей машины (100), содержащая, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R), действующий непосредственно или опосредованно, по меньшей мере, на один взаимодействующий с поверхностью земли элемент (102L, 102R, 104L, 104R) рабочей машины (100), и, по меньшей мере, один привод (20) рабочего тормоза, выполненный с возможностью перемещения между полностью включенным положением и полностью выключенным положением, а также привод (22) акселератора для активации поступательного движения рабочей машины (100), отличающаяся тем, что в состоянии активации тормозной системы (10) указанный, по меньшей мере, один привод (20) рабочего тормоза включается и выключается давлением жидкости в гидравлической системе (12), управляемой электронным блоком (120) управления транспортного средства, и тормозная система (10) снабжена приводным устройством (30), предпочтительно клапанным устройством, которое в состоянии активации тормозной системы (10) обеспечивает автоматическое перемещение, по меньшей мере, одного привода (20) рабочего тормоза в полностью включенное положение, когда освобожден привод (22) акселератора.
8. Тормозная система по п.7, отличающаяся тем, что приводное устройство (30), предпочтительно клапанное устройство, в состоянии активации тормозной системы (10) обеспечивает автоматическое перемещение привода (20) рабочего тормоза в полностью включенное положение только в том случае, когда рабочая машина (100) неподвижна или двигается со скоростью, не превышающей заданное пороговое значение.
9. Тормозная система по п.7, отличающаяся тем, что приводное устройство (30), предпочтительно клапанное устройство, может находиться в первом рабочем состоянии или во втором рабочем состоянии, причем первое рабочее состояние соответствует положению действия привода (22) акселератора, а второе рабочее состояние соответствует освобожденному положению привода (22) акселератора.
10. Тормозная система по п.7, отличающаяся тем, что привод (20) рабочего тормоза имеет механическое, электромеханическое или гидравлическое соединение, по меньшей мере, с одним гидравлическим клапаном (40F, 40R), управляющим указанным, по меньшей мере, одним рабочим тормозом (106L, 106R, 108L, 108R).
11. Тормозная система по п.9, отличающаяся тем, что приводное устройство (30), предпочтительно клапанное устройство, во втором рабочем состоянии подает на указанный, по меньшей мере, один рабочий тормоз (106L, 106R, 108L, 108R) включающее его давление гидравлической жидкости для блокировки указанного, по меньшей мере, одного взаимодействующего с поверхностью земли элемента (102L, 102R, 104L, 104R) рабочей машины (100), когда привод (20) рабочего тормоза находится в полностью включенном положении.
12. Тормозная система по п.9, отличающаяся тем, что она снабжена приводным элементом (42) для перемещения привода (20) рабочего тормоза обратно в полностью выключенное положение, когда приводное устройство (30), предпочтительно клапанное устройство, находится в первом рабочем состоянии.
13. Тормозная система по п.9, отличающаяся тем, что когда приводное устройство (30) находится в первом рабочем состоянии, на указанный по меньшей мере один рабочий тормоз (106L, 106R, 108L, 108R) подается давление гидравлической жидкости, величина которого ниже величины давления, включающего указанный по меньшей мере один рабочий тормоз (106L, 106R, 108L, 108R).
14. Тормозная система по п.7, отличающаяся тем, что она снабжена выдвижной защелкой для запирания привода (20) рабочего тормоза в полностью включенном положении.
15. Тормозная система по одному из пп.7-14, отличающаяся тем, что она снабжена приводом для задания одного или нескольких режимов рабочей машины (100), причем один режим является рабочим режимом, активирующим тормозную систему (10).
16. Тормозная система по п.15, отличающаяся тем, что она снабжена дисплеем, на котором отображается заданный режим.
| Устройство для перекрытия ствола скважины | 1981 |
|
SU989039A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2270771C2 |

