Область техники
Настоящее изобретение относится к электрическому тормозному устройству, которое прикладывает тормозную силу на колесе в зависимости от силы, сформированной посредством электромотора, и к тормозной системе транспортного средства, выполненной с возможностью включать в себя электрическое тормозное устройство.
Уровень техники
Общие электрические тормозные устройства выполнены с возможностью включать в себя i) вращающийся узел, который вращается вместе с колесом, ii) фрикционный элемент, который прижимается к вращающемуся узлу, чтобы формировать тормозную силу вследствие трения с вращающимся узлом, и iii) актуатор, имеющий электромотор, служащий в качестве приводного источника, и поршень, который управляет электромотором таким образом, чтобы перемещать поршень вперед, чтобы прижимать фрикционный элемент к вращающемуся узлу посредством перемещения вперед поршня. В электрических тормозных устройствах, как описано выше, требуется, чтобы фактическое время от возникновения запроса на тормозную силу до фактического формирования тормозной силы было небольшим, т.е. скорость отклика была превосходной. По этой причине, например, как описано в следующей публикации не прошедшей экспертизу заявки на патент Японии № 2012-240632 (JP 2012-240632 А), когда отсутствует запрос на тормозную силу, поршень расположен таким образом, что зазор между фрикционным элементом и вращающимся узлом находится в пределах соответствующего диапазона.
Между тем, общие актуаторы имеют рабочий механизм преобразования для взаимного преобразования вращения электромотора и перемещения вперед и назад поршня. Винтовой механизм, состоящий из вращающегося элемента, имеющего одно из винта с наружной резьбой и винта с внутренней резьбой, и элемента с прямолинейным движением, имеющего другой винт, приспосабливается в качестве рабочего механизма преобразования. Чтобы плавно управлять винтовым механизмом, например, смазочный материал, такой как смазка, может размещаться между винтом с наружной резьбой и винтом с внутренней резьбой, как описано в следующей публикации не прошедшей экспертизу заявки на патент Японии № 2015-48850 (JP 2015-48850 А).
Сущность изобретения
Тем не менее, когда зазор задается максимально возможно небольшим с учетом вышеописанной скорости отклика, в частности, когда зазор задается меньше люфта винтового механизма, вызывается явление, при котором смазочный материал не входит хорошо между одной поверхностью гребня винта и другой стороной поверхности канавки винта, которая обращена к одной поверхности. Как результат, бесперебойная работа винтового механизма, т.е. бесперебойная работа актуатора, затрудняется. Если обратить внимание на проблему, описанную выше, запас для выполнения улучшений для повышения практичности не затрагивается в предшествующем уровне техники электрические тормозные устройства. Изобретение предоставляет электрическое тормозное устройство, имеющее высокую практичность, и тормозную систему транспортного средства, имеющую высокую практичность и выполненную с возможностью включать в себя электрическое тормозное устройство.
Электрическое тормозное устройство имеет такую конфигурацию, в которой, когда отсутствует запрос на тормозную силу для электрического тормозного устройства, контроллер электрического тормозного устройства, который управляет вращением электромотора, избирательно выполняет (a) управление в состоянии готовности для инструктирования элементу с прямолинейным движением находиться в позиции готовности, в которой зазор между фрикционным элементом и вращающимся узлом не превышает люфт между винтом с наружной резьбой и винтом с внутренней резьбой, и (b) управление перемещением назад для перемещения назад элемента с прямолинейным движением в позицию перемещения назад, которая разрешает зазору быть равным или большим люфта. Тормозная система включает в себя множество тормозных устройств, и, по меньшей мере, одно из тормозных устройств представляет собой электрическое тормозное устройство, описанное выше.
С помощью электрического тормозного устройства, посредством избирательного выполнения управления в состоянии готовности и управления перемещением назад, можно заставлять смазочный материал распространяться между одной поверхностью гребня винта для винта с наружной резьбой и одной поверхностью канавки винта для винта с внутренней резьбой, которая обращена к одной поверхности гребня винта, и между другой поверхностью гребня винта для винта с наружной резьбой и другой поверхностью канавки винта для винта с внутренней резьбой, которая обращена к другой поверхности гребня винта, и демонстрируется такой эффект, что гарантируется бесперебойная работа актуатора. С помощью тормозной системы, эффекты электрического тормозного устройства изобретения могут получаться посредством приспособления электрического тормозного устройства изобретения.
Далее примерно иллюстрируются некоторые аспекты изобретения (в дальнейшем также может называться просто "заявляемым изобретением"), распознанные как заявляемые в настоящем изобретении, и аспекты описываются ниже. Аналогично формуле изобретения, соответствующие аспекты разделяются на разделы, номера присоединяются к соответствующим разделам, и описание приводится в форме цитирования номеров других разделов по мере необходимости. Это служит просто для упрощения понимания заявляемого изобретения и не предназначено для ограничения комбинаций составляющих элементов, составляющих означенные изобретения, составляющими элементами, описанными в нижеприведенных соответствующих разделах. Таким образом, заявляемое изобретение должно интерпретироваться с учетом описания, прилагаемого к соответствующим разделам, описания вариантов осуществления и т.п. При условии, что заявляемое изобретение соответствует интерпретации, аспекты, в которых другие дополнительные составляющие элементы добавляются в аспекты соответствующих разделов, и аспекты, в которых некоторые составляющие элементы исключаются из аспектов соответствующих разделов, могут представлять собой аспекты заявляемого изобретения.
(1) Первый аспект изобретения относится к электрическому тормозному устройству, которое должно монтироваться на транспортном средстве. Электрическое тормозное устройство включает в себя вращающийся узел, выполненный с возможностью вращаться вместе с колесом; фрикционный элемент, выполненный с возможностью формировать тормозную силу вследствие трения с вращающимся узлом посредством прижатия к вращающемуся узлу; электромотор, служащий в качестве приводного источника; поршень; рабочий механизм преобразования, выполненный с возможностью преобразовывать вращение электромотора в перемещение вперед и назад поршня; актуатор, выполненный с возможностью прижимать фрикционный элемент к вращающемуся узлу посредством перемещения вперед поршня; и контроллер, выполненный с возможностью управлять актуатором посредством управления вращением электромотора. Рабочий механизм преобразования выполнен с возможностью включать в себя вращающийся элемент, который формируется с одним из винта с наружной резьбой и винта с внутренней резьбой, зацепленных с помощью резьбы друг с другом в состоянии, в котором смазочный материал размещается между ними, и является вращающимся посредством вращения электромотора, и элемент с прямолинейным движением, сформированный с другим из винта с наружной резьбой и винта с внутренней резьбой и адаптированный с возможностью быть подвижным вперед и назад, чтобы перемещать поршень вперед и назад. Контроллер избирательно выполняет (a) управление в состоянии готовности для инструктирования элементу с прямолинейным движением находиться в позиции готовности, в которой зазор между фрикционным элементом и вращающимся узлом не превышает люфт между винтом с наружной резьбой и винтом с внутренней резьбой, и (b) управление перемещением назад для перемещения назад элемента с прямолинейным движением в позицию перемещения назад, в которой допускается зазор равный или больший люфта, в случае если отсутствует запрос на тормозную силу для электрического тормозного устройства.
Первый аспект изобретения представляет собой базовый аспект электрического тормозного устройства согласно заявляемому изобретению. Согласно первому аспекту изобретения, когда отсутствует запрос на тормозную силу, управление в состоянии готовности позволяет располагать поршень в позиции для реализации зазора таким образом, что скорость отклика электрического тормозного устройства становится превосходной при недопущении явления "прихватывания" тормозов, т.е. явления, в котором колесо вращается в то время, когда фрикционный элемент подталкивается к вращающемуся узлу. Между тем, управление перемещением назад позволяет заставлять смазочный материал распространяться между винтом с наружной резьбой и винтом с внутренней резьбой, зацепленными с помощью резьбы друг с другом, подробно, между одной поверхностью гребня винта для винта с наружной резьбой и одной поверхностью канавки винта для винта с внутренней резьбой, которая обращена к одной поверхности гребня винта, и между другой поверхностью гребня винта для винта с наружной резьбой и другой поверхностью канавки винта для винта с внутренней резьбой, которая обращена к другой поверхности гребня винта. Согласно первому аспекту изобретения, можно гарантировать как скорость отклика электрического тормозного устройства, так и плавность работы за счет задания соответствующими условия, времени и т.п. для выполнения управления перемещением назад.
Хотя формы "винта с наружной резьбой" и "винта с внутренней резьбой", зацепленных с помощью резьбы друг с другом, не ограничены конкретным образом, желательно приспосабливать трапециевидные винты в качестве винта с наружной резьбой и винта с внутренней резьбой с точки зрения таких преимуществ, что шаг является относительно большим, и прочность является высокой. Обычно, поскольку трапециевидные винты имеют относительно большой люфт, значимость выполнения управления перемещением назад, т.е. значимость применения настоящего аспекта является большой. Винт с наружной резьбой может формироваться во вращающемся элементе, и винт с внутренней резьбой может формироваться в элементе с прямолинейным движением. С другой стороны, винт с внутренней резьбой может формироваться во вращающемся элементе, и винт с наружной резьбой может формироваться в элементе с прямолинейным движением.
"Элемент с прямолинейным движением" не обязательно предоставлен отдельно от "поршня". Элемент с прямолинейным движением и поршень могут интегрироваться друг с другом. Относительно "зазора", например, когда пара фрикционных элементов прижимается к обеим поверхностям вращающегося узла, сумма промежутка между каждым из этих фрикционных элементов и вращающимся узлом становится зазором. Дополнительно, в случае если поршень и фрикционный элемент не интегрируются друг с другом, или в случае, если узел суппорта и фрикционный элемент не интегрируются друг с другом, например, в случае если электрическое тормозное устройство удерживается таким образом, что оно является подвижным относительно вращающегося узла в качестве тормозного суппорта, сумма, полученная посредством промежутка, сформированного между поршнем и фрикционным элементом, или промежутка, сформированный между узлом суппорта и фрикционным элементом, представляет собой зазор. В случае если поршень и элемент с прямолинейным движением не интегрируются друг с другом, сумма, добавляющая промежуток, сформированный между поршнем и элементом с прямолинейным движением, представляет собой зазор.
Как "позиция готовности", так и "позиция перемещения назад" не обязательно должны представлять собой фиксированные позиции. Множество позиций готовности и множество позиций перемещения назад, которые отличаются в зависимости от различных условий, могут задаваться. "Запрос на тормозную силу" может быть основан на операции тормозного рабочего элемента, такого как педаль тормоза, водителем или может быть основан на команде из системы автономного вождения и т.п.
(2) В электрическом тормозном устройстве согласно первому аспекту изобретения, контроллер может быть выполнен с возможностью начинать выполнение управления в состоянии готовности, чтобы разрешать перемещение назад элемента с прямолинейным движением, когда запрос на тормозную силу для электрического тормозного устройства отменен, когда предварительно установленное предварительное условие не удовлетворяется, и начинать выполнение управления перемещением назад, когда запрос на тормозную силу отменен, когда предварительно установленное предварительное условие удовлетворяется.
"Предварительно установленное предварительное условие" в первом аспекте изобретения может считаться допустимым условием для выполнения управления перемещением назад. С другой стороны, неудовлетворение предварительно установленного предварительного условия также может рассматриваться как запрещенное условие при выполнении управления перемещением назад. Например, в случае если электрическое тормозное устройство выполнено с возможностью избирательно выполнять управление в состоянии готовности и управление перемещением назад с таким событием, что запрос на тормозную силу отменен, в качестве начального условия, нормально, управление в состоянии готовности выполняется, и когда предварительно установленное предварительное условие удовлетворяется, управление перемещением назад может выполняться. В этом случае, когда предварительно установленное предварительное условие представляет собой такое условие, что управление перемещением назад выполняется до такой степени, что бесперебойная работа гарантируется, управление перемещением назад может выполняться на низкой частоте.
(3) В электрическом тормозном устройстве согласно первому аспекту изобретения, предварительно установленное предварительное условие может задаваться на основе состояния активации электрического тормозного устройства.
(4) В электрическом тормозном устройстве согласно первому аспекту изобретения, состояние активации электрического тормозного устройства может индексироваться в зависимости от числа раз, когда электрическое тормозное устройство формирует тормозную силу после того, как управление перемещением назад выполняется позже всего, и контроллер может быть выполнен с возможностью использовать такое событие, что число раз превышает предварительно установленное число, в качестве предварительно установленного предварительного условия, и начинать выполнение управления перемещением назад, когда предварительно установленное условие удовлетворяется.
Вышеописанные (3) и (4) представляют собой аспекты, в которых ограничения добавляются в предварительно установленное предварительное условие. В вышеописанном (3), например, управление перемещением назад может выполняться при условии, что "состояние активации" становится состоянием, в котором смазка с использованием смазочного материала между винтом с наружной резьбой и винтом с внутренней резьбой предполагается недостаточной. В качестве индексов, показывающих "рабочее состояние", в частности, например, можно приспосабливать "временное целочисленное значение тормозной силы, сформированной посредством электрического тормозного устройства, после того, как управление перемещением назад выполняется позже всего" и т.п., включающее в себя "число раз, когда электрическое тормозное устройство формирует тормозную силу после того, как управление перемещением назад выполняется позже всего" в вышеописанном (4).
(5) В электрическом тормозном устройстве согласно первому аспекту изобретения, контроллер может быть выполнен с возможностью разрешать выполнение управления перемещением назад в ситуации низкой вероятности операции нажатия педали тормоза, в которой вероятность операции нажатия педали тормоза водителем является низкой.
Первый аспект изобретения представляет собой аспект, в котором такое условие, что электрическое тормозное устройство переключено в "ситуацию низкой вероятности операции нажатия педали тормоза", представляет собой допустимое условие при выполнении управления перемещением назад, и с другой стороны, может рассматриваться как аспект, в котором такое условие, что электрическое тормозное устройство не переключено в "ситуацию низкой вероятности операции нажатия педали тормоза", представляет собой запрещенное условие при выполнении управления перемещением назад. Когда отсутствует запрос на тормозную силу, управление перемещением назад может выполняться при таком начальном условии, что электрическое тормозное устройство переключено в "ситуацию низкой вероятности операции нажатия педали тормоза". В случае если автоматическое торможение также учитывается вместо ситуации низкой вероятности операции нажатия педали тормоза, выполнение управления перемещением назад может разрешаться в ситуации низкой вероятности запроса на тормозную силу, в которой вероятность того, что запрос на тормозную силу выполнен, является низкой.
(6) В электрическом тормозном устройстве, согласно первому аспекту изобретения, контроллер может быть выполнен с возможностью разрешать выполнение управления перемещением назад на основе инструкции, показывающей то, что транспортное средство находится в ситуации низкой вероятности операции нажатия педали тормоза, из системы мониторинга, в случае если транспортное средство оснащено системой мониторинга, которая отслеживает ситуацию вокруг транспортного средства.
Первый аспект изобретения представляет собой аспект, в котором ограничения добавляются в "нахождение в ситуации низкой вероятности операции нажатия педали тормоза". В качестве примеров "системы мониторинга", предусмотрены система автономного вождения транспортного средства, система недопущения столкновения транспортных средств и т.п. В частности, например, в вышеописанных системах, вероятность того, что запрос на тормозную силу для рассматриваемого транспортного средства выполнен, может определяться как низкая, т.е. вероятность того, что операция нажатия педали тормоза водителем выполнена, может определяться как низкая при условии, что другие транспортные средства, помехи и т.п., которые приближаются к передней части рассматриваемого транспортного средства, не присутствуют, и выполнение управления перемещением назад может разрешаться, или управление перемещением назад может выполняться на основе определения.
(7) В электрическом тормозном устройстве согласно первому аспекту изобретения, ситуация низкой вероятности операции нажатия педали тормоза может определяться на основе, по меньшей мере, одного из рабочего состояния транспортного средства и состояния движения транспортного средства.
(8) В электрическом тормозном устройстве согласно первому аспекту изобретения, состояние движения транспортного средства может индексироваться в зависимости от присутствия или отсутствия операции нажатия педали акселератора транспортного средства, и рабочее состояние транспортного средства может индексироваться в зависимости от скорости движения транспортного средства, и контроллер выполнен с возможностью разрешать выполнение управления перемещением назад, когда скорость движения транспортного средства равна или меньше заданной скорости, и операция нажатия педали акселератора не выполняется.
Вышеописанные (7) и (8) представляют собой аспекты, в которых отдельные ограничения добавляются в "нахождение в ситуации низкой вероятности операции нажатия педали тормоза". В качестве индексов, показывающих "рабочее состояние транспортного средства", могут приспосабливаться, например, "присутствие или отсутствие или степень операции руления транспортного средства" и т.п., включающие в себя "присутствие или отсутствие операции нажатия педали акселератора" в вышеописанном (8). В этой связи, операция нажатия педали акселератора, операция руления и т.п. не ограничены операциями, выполняемыми самим водителем, и может представлять собой автономный режим работы посредством системы автономного вождения. В качестве индексов, показывающих "состояние движения транспортного средства", могут приспосабливаться, например, "поперечное ускорение и ускорение вперед и назад, сформированное в транспортном средстве", "поведение при наклоне в продольном направлении, поведение при крене и поведение при наклоне относительно вертикальной оси транспортного средства" и т.п., включающие в себя "скорость движения транспортного средства" в вышеописанном (8). Можно сказать, что допустимое условие в вышеописанном (8) представляет собой условие, заданное с точки зрения того, что "снижение скорости отклика вследствие управления перемещением назад не имеет плохого влияния, даже когда запрос на тормозную силу формируется".
(9) В электрическом тормозном устройстве согласно первому аспекту изобретения, управление перемещением назад может включать в себя управление для перемещения элемента с прямолинейным движением вперед вплоть до позиции готовности после того, как элемент с прямолинейным движением перемещается назад вплоть до позиции перемещения назад.
Просто, первый аспект изобретения может рассматриваться в качестве аспекта, в котором управление в состоянии готовности выполняется таким образом, чтобы перемещать элемент с прямолинейным движением вперед после того, как элемент с прямолинейным движением поступает в позицию перемещения назад при управлении перемещением назад. Скорость отклика электрического тормозного устройства ухудшается в состоянии, в котором элемент с прямолинейным движением расположен в позиции перемещения назад. Согласно первому аспекту изобретения, можно быстро разрешать состояние, в котором скорость отклика электрического тормозного устройства ухудшается посредством перемещения элемента с прямолинейным движением, который перемещен назад вплоть до позиции перемещения назад, вперед вплоть до позиции готовности. Даже когда позиция готовности, в которой элемент с прямолинейным движением перемещается вперед при управлении перемещением назад, и позиция готовности, в которой элемент с прямолинейным движением расположен при управлении в состоянии готовности, могут представлять собой идентичные позиции относительно друг друга либо могут представлять собой позиции, отличающиеся друг от друга.
(10) В электрическом тормозном устройстве согласно первому аспекту изобретения, контроллер может быть выполнен с возможностью передавать сигнал, показывающий выполнение управления перемещением назад.
Как описано выше, поскольку управление перемещением назад представляет собой управление для перемещения элемента с прямолинейным движением назад вплоть до позиции перемещения назад, возникает такая проблема, что скорость отклика электрического тормозного устройства ухудшается, когда управление перемещением назад выполняется. Согласно первому аспекту изобретения, тот факт, что управление перемещением назад выполняется, может уведомляться, например, в другие системы, другие тормозные устройства и т.п. Следовательно, в вышеописанных других системах, других тормозных устройствах и т.п., можно преодолевать ухудшение скорости отклика в электрическом тормозном устройстве.
(11) Второй аспект изобретения относится к тормозной системе транспортного средства, включающей в себя электрическое тормозное устройство; и к отдельному тормозному устройству, предоставленное на колесе, отдельном от колеса, содержащего электрическое тормозное устройство.
Второй аспект изобретения представляет собой аспект относительно тормозной системы, в которой одно множества колес, предоставленных в транспортном средстве, содержит электрическое тормозное устройство аспекта, и одно или более других колес в колесах содержат другие тормозные устройства. В качестве "других тормозных устройств", в тормозной системе, может предоставляться только одно тормозное устройство, либо может предоставляться множество тормозных устройств. Другие тормозные устройства могут формировать тормозную силу только для одного колеса или могут формировать тормозные силы для множества колес. Кроме того, другие тормозные устройства могут представлять собой тормозные устройства, идентичные электрическому тормозному устройству аспекта с точки зрения конфигурации, либо могут представлять собой тормозные устройства различных типов или различных конфигураций. С помощью тормозной системы второго аспекта изобретения, можно пользоваться преимуществами, используемыми посредством электрического тормозного устройства аспекта даже в тормозной системе.
(12) В тормозной системе согласно второму аспекту изобретения, отдельное тормозное устройство может представлять собой гидравлическое тормозное устройство, выполненное с возможностью включать в себя колесный тормоз, который формирует тормозную силу посредством прижатия фрикционного элемента к вращающемуся узлу, который вращается вместе с колесом, на основе давления гидравлической жидкости, которая должна подаваться в отдельное тормозное устройство, исходное устройство высокого давления для подачи гидравлической жидкости высокого давления в колесный тормоз, когда исходное устройство высокого давления работает, и устройство регулирования давления, которое регулирует давление гидравлической жидкости, которая должна подаваться из исходного устройства высокого давления в колесный тормоз, до давления согласно запросу на тормозную силу для отдельного тормозного устройства.
Тормозная система второй аспект изобретения представляет собой просто тормозную систему, в которой электрическое тормозное устройство и гидравлическое тормозное устройство смешиваются друг с другом. Электрическое тормозное устройство имеет такое преимущество, что скорость отклика является превосходной, и гидравлическое тормозное устройство имеет такое преимущество, что надежность является высокой. С помощью тормозной системы второго аспекта изобретения, можно конструировать высокоэффективную тормозную систему с использованием выгоды этих преимуществ.
(13) В тормозной системе согласно второму аспекту изобретения, тормозная система может быть выполнена с возможностью осуществлять управление повышением скорости отклика для дополнительного повышения скорости отклика отдельного тормозного устройства относительно запроса на тормозную силу для отдельного тормозного устройства, когда управление перемещением назад выполняется в электрическом тормозном устройстве.
Второй аспект изобретения может считаться аспектом для того, чтобы преодолевать ухудшение скорости отклика электрического тормозного устройства во время выполнения управления перемещением назад посредством выполнения управления повышением скорости отклика в других тормозных устройствах. С помощью второго аспекта изобретения, можно не допускать ситуации, когда скорость отклика всей тормозной системы ухудшается, заранее.
(14) В тормозной системе согласно второму аспекту изобретения, отдельное тормозное устройство может быть выполнено с возможностью включать в себя колесный тормоз, который формирует тормозную силу посредством прижатия фрикционного элемента к вращающемуся узлу, который вращается вместе с колесом, на основе давления гидравлической жидкости, которая должна подаваться в отдельное тормозное устройство, исходное устройство высокого давления, выполненное с возможностью подавать гидравлическую жидкость высокого давления в колесный тормоз, когда источник высокого давления работает, и устройство регулирования давления, выполненное с возможностью регулировать давление гидравлической жидкости, которая должна подаваться из исходного устройства высокого давления в колесный тормоз в соответствии с запросом на тормозную силу для отдельного тормозного устройства, и управление повышением скорости отклика может представлять собой управление для выполнения, по меньшей мере, одного из продвижения вперед времени начала работы исходного устройства высокого давления и повышения давления гидравлической жидкости, отрегулированной посредством устройства регулирования давления.
В случае если отдельное тормозное устройство представляет собой гидравлическое тормозное устройство, в частности, гидравлическое тормозное устройство, в котором не присутствует аккумулятор, который накапливает гидравлическую жидкость из исходного устройства высокого давления, время формирования гидравлической тормозной силы, которая представляет собой тормозную силу, сформированную посредством гидравлического тормозного устройства, задерживается, если исходное устройство высокого давления не работает заранее. Между тем, когда давление гидравлической жидкости, которая должна подаваться в колесный тормоз, задается высоким, градиент повышения гидравлической тормозной силы является большим. Как результат, можно ослаблять задержку в отслеживании увеличения в ответ на запрос на тормозную силу. Во втором аспекте изобретения, когда управление перемещением назад выполняется в электрическом тормозном устройстве с использованием этих явлений, управления повышением скорости отклика во втором аспекте изобретения выполняется в гидравлическом тормозном устройстве, чтобы предотвращать или ослаблять ухудшение скорости отклика всей тормозной системы.
(15) В тормозной системе согласно второму аспекту изобретения, контроллер может быть выполнен с возможностью передавать сигнал, показывающий выполнение управления перемещением назад, и управление повышением скорости отклика выполнено с возможностью осуществления на основе сигнала.
Согласно второму аспекту изобретения, поскольку управление повышением скорости отклика выполняется на основе инструкции из электрического тормозного устройства, можно эффективно не допускать ухудшения скорости отклика всей тормозной системы.
(16) В тормозной системе согласно второму аспекту изобретения, когда сумма тормозной силы, сформированной посредством электрического тормозного устройства, и тормозной силы, сформированной посредством отдельного тормозного устройства, снижается таким образом, что она равна или меньше заданного уровня, тормозная система может быть выполнена с возможностью отменять запрос на тормозную силу для электрического тормозного устройства и увеличивать тормозную силу, сформированную посредством отдельного тормозного устройства, на величину тормозной силы, которая должна формироваться посредством электрического тормозного устройства.
Согласно второму аспекту изобретения, поскольку состояние, в котором отсутствует запрос на тормозную силу для электрического тормозного устройства, положительно реализовано, можно повышать частоту выполнения управления перемещением назад в электрическом тормозном устройстве.
(17) В тормозной системе согласно второму аспекту изобретения, отдельное тормозное устройство может представлять собой электрическое тормозное устройство, имеющее конфигурацию, идентичную конфигурации электрического тормозного устройства, и тормозная система может быть выполнена с возможностью, когда одно из электрических тормозных устройств выполняет управление перемещением назад, запрещать выполнение управления перемещением назад посредством другого электрического тормозного устройства.
Согласно аспектам изобретения, поскольку запрещается одновременное выполнение управления перемещением назад во множестве электрических тормозных устройств, в случае если электрические тормозные устройства предоставляются, можно задавать риск того, что скорость отклика ухудшается в тормозной системе, низким.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является видом, концептуально иллюстрирующим общую конфигурацию тормозной системы варианта осуществления;
Фиг. 2 является принципиальной гидравлической схемой гидравлического тормозного устройства, которое составляет тормозную систему, проиллюстрированную на фиг. 1;
Фиг. 3 является видом в сечении, иллюстрирующим колесные тормоза гидравлического тормозного устройства, которое составляет тормозную систему, проиллюстрированную на фиг. 1;
Фиг. 4 является видом в сечении, иллюстрирующим электрическое тормозное устройство, которое составляет тормозную систему, проиллюстрированную на фиг. 1;
Фиг. 5 является видом в сечении, иллюстрирующим актуатор, который составляет электрическое тормозное устройство, проиллюстрированное на фиг. 4;
Фиг. 6A является дополнительным видом для иллюстрации смещающего механизма актуатора, проиллюстрированного на фиг. 5;
Фиг. 6B является дополнительным видом для иллюстрации смещающего механизма актуатора, проиллюстрированного на фиг. 5;
Фиг. 7 является видом в сечении винта с наружной резьбой и винта с внутренней резьбой для иллюстрации взаимосвязи резьбового зацепления между винтом с наружной резьбой входного вала и винтом с внутренней резьбой выходного цилиндра, приспосабливаемого в рабочем механизме преобразования актуатора электрического тормозного устройства;
Фиг. 8 является графиком, иллюстрирующим характеристики тормозной силы гидравлического тормозного устройства, проиллюстрированного на фиг. 1, и изменения характеристик;
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей управляющую программу электрического тормозного устройства, которая должна выполняться в электронном модуле управления для электрического тормозного устройства, который представляет собой контроллер электрического тормозного устройства;
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру управления перемещением назад, которая составляет управляющую программу электрического тормозного устройства; и
Фиг. 11 является блок-схемой последовательности операций способа управляющей программы тормоза, которая должна выполняться в электронном модуле управления для гидравлического тормозного устройства, который функционирует в качестве интегрального контроллера в тормозной системе.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе, со ссылкой на чертежи подробно описываются электрическое тормозное устройство и тормозная система, которые представляют собой варианты осуществления заявляемого изобретения в качестве режимов для выполнения заявляемого изобретения. Заявляемое изобретение может выполняться в различных режимах, в которые вносятся различные изменения и улучшения на основе сведений специалистов в данной области техники, включающих в себя режимы, описанные в вышеприведенном разделе "Аспекты изобретения", в дополнение к нижеприведенным вариантам осуществления.
A. Краткий обзор приводной системы и тормозной системы транспортного средства
Как проиллюстрировано в схематичном виде по фиг. 1, транспортное средство, на котором монтируется тормозная система варианта осуществления, представляет собой гибридное транспортное средство, в котором передние колеса 10F и задние колеса 10R составляют два, соответственно, и два передних колеса 10F представляют собой ведущие колеса. Во-первых, для описания приводной системы транспортного средства, приводная система транспортного средства, смонтированная на рассматриваемом транспортном средстве, имеет двигатель 12, служащий в качестве приводного источника, генератор 14, который главным образом функционирует в качестве генератора мощности, устройство 16 деления мощности, с которым соединяются двигатель 12 и генератор 14, и электромотор 18, который представляет собой другой приводной источник.
Устройство 16 деления мощности имеет функцию деления вращения двигателя 12 на вращение генератора 14 и вращение выходного вала. Электромотор 18 соединяется с выходным валом через редукторный механизм 20, который выступает в качестве редуктора. Вращение выходного вала передается через дифференциальный механизм 22, и ведущие валы 24L, 24R и правое и левое переднее колесо 10F вращательно приводятся в действие/в движение. Генератор 14 соединяется с аккумулятором 28 через инвертор 26G, и электрическая энергия, полученная посредством выработки мощности генератора 14, накапливается в аккумуляторе 28. Электромотор 18 также соединяется с аккумулятором 28 через инвертор 26M, и работа электромотора 18 и работа генератора 14 управляются посредством управления инвертором 26M и инвертором 26G, соответственно. Управление скоростью заряда аккумулятора 28 и управление инвертором 26M и инвертором 26G выполняется посредством гибридного электронного модуля 29 управления (в дальнейшем также называемого просто "HB-ECU"), выполненного с возможностью включать в себя компьютер, схему приведения в действие (приводной механизм) соответствующих устройств, которые составляют приводную систему транспортного средства, и т.п.
Как схематично проиллюстрировано на фиг. 1, тормозная система варианта осуществления, смонтированная на рассматриваемом транспортном средстве, выполнена с возможностью примерно включать в себя (a) рекуперативное тормозное устройство 30, которое прикладывает тормозную силу к каждому из двух передних колес 10F, (b) гидравлическое тормозное устройство 32, которое прикладывает тормозную силу к каждому из двух передних колес 10F независимо от тормозной силы, прикладываемой посредством рекуперативного тормозного устройства 30, и (c) пару электрических тормозных устройств 34, которые прикладывают тормозные силы к двум задним колесам 10R, соответственно. Электрические тормозные устройства 34 представляют собой электрические тормозные устройства варианта осуществления.
B. Конфигурация рекуперативного тормозного устройства
Рекуперативное тормозное устройство 30 может считаться составляющим фрагмент приводной системы транспортного средства с точки зрения аппаратных средств. Во время замедления транспортного средства, вследствие вращения передних колес 10F, электромотор 18 вращается без снабжения электрической мощностью из аккумулятора 28. Электромотор 18 вырабатывает мощность, с использованием электродвижущей силы, вызываемой посредством вращения, и вырабатываемая электрическая мощность накапливается в качестве электрической величины в аккумуляторе 28 через инвертор 26M. Таким образом, электромотор 18 задается с возможностью выступать в качестве генератора и заменяет аккумулятор 28. Вращение передних колес 10F, т.е. транспортного средства, сильно замедляется посредством энергии, эквивалентной заряженной электрической величине. Рассматриваемое транспортное средство состоит из рекуперативного тормозного устройства 30, как описано выше. Тормозная сила (в дальнейшем также называемая просто "рекуперативной тормозной силой"), прикладываемая к каждому из передних колес 10F посредством рекуперативного тормозного устройства 30, основана на величине выработки мощности, и сформированная рекуперативная тормозная сила управляется посредством управления инвертором 26M, выполняемого посредством HB-ECU 29. Поскольку устройство, имеющее общую конфигурацию, может приспосабливаться для рекуперативного тормозного устройства 30, подробное описание относительно рекуперативного тормозного устройства 30 опускается.
C. Конфигурация гидравлического тормозного устройства
i) Общая конфигурация
Гидравлическое тормозное устройство 32 представляет собой тормозное устройство, которое формирует тормозную силу в зависимости от давления гидравлической жидкости, и выполнено с возможностью примерно включать в себя (a) главный цилиндр 42, с которым соединяется педаль 40 тормоза, которая представляет собой тормозной рабочий элемент, который должен управляться водителем, (b) модуль 44 актуатора, который подает гидравлическую жидкость из главного цилиндра 42 посредством разрешения гидравлической жидкости проходить через него, или который регулирует давление гидравлической жидкости, давление которой поднято с помощью насоса (описывается ниже) модуля актуатора, чтобы подавать стабилизированную гидравлическую жидкость, и (c) пару колесных тормозов 46, которые предоставляются для правого и левого передних колес 10F, соответственно, чтобы уменьшать вращение каждого из правого и левого передних колес 10F посредством давления гидравлической жидкости из модуля 44 актуатора. В этой связи, гидравлическое тормозное устройство 32 представляет собой двухсистемное устройство, соответствующее правому и левому передним колесам 10F.
ii) Конфигурация главного цилиндра
Как проиллюстрировано на фиг. 2, главный цилиндр 42 представляет собой тандемное цилиндрическое устройство, включающее в себя, внутри кожуха, два поршня 42a, соединенные с педалью 40 тормоза и расположенные последовательно друг с другом, и две нагнетательные камеры 42b, в которых гидравлическая жидкость, введенная в них, подвергается созданию повышенного давления посредством перемещения поршней 42a, и бачок 48, служащий в качестве источника низкого давления, который накапливает гидравлическую жидкость при атмосферном давлении, присоединяется к главному цилиндру. Таким образом, бачок 48 располагается около главного цилиндра 42, и гидравлическая жидкость из бачка 48 подвергается созданию повышенного давления в каждой из двух нагнетательных камер 42b. Затем главный цилиндр 42 подает гидравлическую жидкость с давлением, согласно силе (в дальнейшем также называемой просто "рабочей тормозной силой"), прикладываемой к педали 40 тормоза, в модуль 44 актуатора для двух систем, соответствующих двум передним колесам 10F. Подробно, модуль 44 актуатора содержит пару каналов для жидкости, которые разрешают гидравлической жидкости, поданной из главного цилиндра 42, проходить через него, и направляет гидравлическую жидкость в колесные тормоза 46, и настоящее гидравлическое тормозное устройство 32 включает в себя пару каналов для жидкости, т.е. пару главных каналов 50 для жидкости, которые формируют фрагменты с каналами для жидкости, соответственно, и подает гидравлическую жидкость из главного цилиндра 42 в колесные тормоза 46, соответственно. Таким образом, в настоящем гидравлическом тормозном устройстве 32 гидравлическая жидкость может подаваться из главного цилиндра 42 через главные каналы 50 для жидкости в колесные тормоза 46, соответственно. Колесные тормоза 46 имеют колесный тормозной цилиндр, который описывается ниже. Подробно, гидравлическая жидкость подается в колесный тормозной цилиндр.
Имитатор 54 сопротивления ходу педали соединяется с одним из главных каналов 50 для жидкости через клапан 52 открытия имитатора, который представляет собой нормально закрытый (означает тип, который переводится в закрытое состояние клапана в ненамагниченном состоянии) электромагнитный клапан открытия и закрытия. В нормальное время (случай, в котором электрическая неисправность не возникает, также может называться "в обычное время" и "во время обычной работы"), клапан 52 открытия имитатора намагничивается и переводится в открытое состояние клапана, и имитатор 54 сопротивления ходу педали функционирует. Хотя ниже описывается, в нормальное время, пара главных отсечных клапанов 56 (главных отсечных клапанов), которые представляют собой два электромагнитных клапана открытия и закрытия, предоставленные в модуле 44 актуатора в соответствии с двумя системами, переводится в закрытое состояние клапана. Следовательно, имитатор 54 сопротивления ходу педали гарантирует ход нажатия педали 40 тормоза и прикладывает рабочую силу реакции согласно ходу нажатия к педали 40 тормоза. Таким образом, имитатор 54 сопротивления ходу педали функционирует в качестве средства для гарантирования ощущения операции нажатия педали тормоза в нормальное время. Поскольку обычная практика заключается в том, что настоящий имитатор 54 сопротивления ходу педали выполнен с возможностью включать в себя камеру для гидравлической жидкости, которая сообщается с главным каналом 50 для жидкости и колеблется по объему, и упругое тело, которое прилагает силу согласно величине увеличения объема камеры для гидравлической жидкости к гидравлической жидкости в камере для гидравлической жидкости, подробное описание имитатора 54 сопротивления ходу педали опускается в данном документе.
iii) Конфигурация модуля актуатора
Модуль 44 актуатора выполнен с возможностью включать в себя два главных отсечных клапана 56, которые представляют собой нормально открытые (означает тип, который переводится в открытое состояние клапана в ненамагниченном состоянии), электромагнитные клапаны открытия и закрытия, которые перекрывают два главных канала 50 для жидкости, описанные выше, соответственно, пару насосов 60, соответствующих двум системам, электромотор 62, который приводит в действие насосы 60, пару регулирующих фиксирующих клапанов 64, которые представляют собой пару линейных электромагнитных клапанов (электромагнитных регулирующих клапанов), соответствующих двум системам, и пару клапанов 66 открытия, которые представляют собой два нормально открытых электромагнитных клапана открытия и закрытия, которые располагаются последовательно с регулирующим фиксирующим клапаном 64. Настоящее гидравлическое тормозное устройство 32 содержит только один бачок, и два насоса 60 выполнены с возможностью накачивать гидравлическую жидкость из бачка 48. Следовательно, канал 68 для жидкости в бачке, который соединяет два насоса 60 и бачки 48 между собой, предоставляется, и фрагмент канала 68 для жидкости в бачке формируется в модуле 44 актуатора. На выпускной стороне, соответствующие насосы 60 соединяются с главными каналами 50 для жидкости и выполнены с возможностью подавать гидравлическую жидкость под давлением в колесные тормоза 46, соответственно, через соответствующие фрагменты главных каналов 50 для жидкости. Контрольный клапан 70 предоставляется на выпускной стороне каждого насоса 60, чтобы предотвращать противоток гидравлической жидкости в каждый насос 60. В модуле 44 актуатора, пара обратных каналов 72 для жидкости, которые соединяют главные каналы 50 для жидкости и канал 68 для жидкости в бачке между собой параллельно с соответствующими насосами 60, формируются в соответствии с двумя системами, и регулирующий фиксирующий клапан 64 и клапаны 66 открытия, соответственно, предоставляются в обратных каналах 72 для жидкости. В этой связи, поскольку клапаны 66 открытия представляют собой клапаны для открытия обратных каналов 72 для жидкости, клапаны 66 открытия могут называться "клапанами 66 открытия обратного канала". Поскольку клапаны 66 открытия представляют собой клапаны, которые перекрывают обратные каналы 72 для жидкости в ненамагниченном состоянии с обратной точки зрения, также можно понимать клапан 66 открытия в качестве отсечных клапанов. В настоящем модуле 44 актуатора, можно считать, что одно насосное устройство 73, функционирующее в качестве исходного устройства высокого давления, выполнено с возможностью включать в себя насосы 60 и электромотор 62. Можно считать, что устройство 74 управляемой подачи гидравлического давления, т.е. устройство регулирования давления для подачи гидравлической жидкости из насосного устройства 73 в каждый из колесных тормозов 46 при одновременном управлении давлением гидравлической жидкости выполнено с возможностью включать в себя насосное устройство 73, канал 68 для жидкости в бачке, соединенный с бачком 48 без использования главного цилиндра 42, обратные каналы 72 для жидкости, регулирующие фиксирующие клапаны 64 и клапаны 66 открытия обратного канала.
В соответствии с двумя системами в модуле 44 актуатора, предоставляется пара датчиков 75 давления в колесном тормозном цилиндре, чтобы определять давление (в дальнейшем также называемое просто "давлением в колесном тормозном цилиндре") гидравлической жидкости, которая должна подаваться в каждый из колесных тормозов 46, и предоставляется пара датчиков 76 давления в главном цилиндре, чтобы определять давление (в дальнейшем также называемое просто "давлением в главном цилиндре") гидравлической жидкости, которая должна подаваться из главного цилиндра 42.
iv) Конфигурация колесного тормоза
Колесный тормоз 46 для прекращения вращения каждого из передних колес 10F представляет собой дисковое тормозное устройство, как схематично проиллюстрировано на фиг. 3. Колесный тормоз 46 выполнен с возможностью включать в себя дисковый ротор 80, служащий в качестве вращающегося узла, который вращается как единое целое с передним колесом 10F, и суппорт 82, который поддерживается с возможностью перемещения посредством ступицы, которая удерживает с возможностью вращения переднее колесо 10F. Колесный тормозной цилиндр 84 включен в суппорт 82. Фрагмент суппорта 82 служит в качестве кожуха колесного тормозного цилиндра 84. Пара тормозных колодок 88 (типов фрикционных элементов) предоставляется в суппорте 82. Одна из тормозных колодок 88 крепится к дальней концевой стороне поршня 86, включенного в колесный тормозной цилиндр 84. Другая из тормозных колодок 88 крепится к фрагменту суппорта 82. Фрагмент суппорта 82, к которому крепится тормозная колодка 88, располагается напротив фрагмента суппорта 82, в который включен колесный тормозной цилиндр 84. Две тормозных колодки 88 обращены друг к другу, при этом дисковый ротор 80 размещается между ними.
Гидравлическая жидкость из модуля 44 актуатора подается в камеру 90 для гидравлической жидкости колесного тормозного цилиндра 84, и тормозные колодки 88 размещают посередине дисковый ротор 80 за счет давления гидравлической жидкости. Таким образом, тормозные колодки 88, которые представляют собой фрикционные элементы, прижимаются к дисковому ротору 80 посредством работы колесного тормозного цилиндра 84. Как описано выше, колесный тормоз 46 формирует тормозную силу для прекращения вращения переднего колеса 10F, т.е. тормозную силу для торможения транспортного средства (в дальнейшем также называемую просто "гидравлической тормозной силой"), с использованием силы трения. Гидравлическая тормозная сила имеет абсолютную величину согласно давлению гидравлической жидкости, которая должна подаваться из модуля 44 актуатора. Поскольку колесный тормоз 46 имеет общую конструкцию, ниже приводится подробное описание колесного тормоза 46.
v) Работа гидравлического тормозного устройства
В нормальное время, два главных отсечных клапана 56 модуля 44 актуатора переводятся в закрытое состояние клапана, клапаны 66 открытия переводятся в открытое состояние клапана, давление гидравлической жидкости из насосного устройства 73 регулируется посредством устройства 74 управляемой подачи гидравлического давления, и отрегулированная гидравлическая жидкость подается в колесные тормоза 46. В частности, в принципе, когда запрос на тормозную силу для гидравлического тормозного устройства 32 формируется с учетом потребления мощности гидравлического тормозного устройства 32, приведение в действие насосов 60 начинается, и подача электрического тока в регулирующие фиксирующие клапаны 64, которые представляют собой линейные электромагнитные клапаны, управляется. Соответственно, давление гидравлической жидкости, которая должна подаваться в колесные тормоза 46, представляет собой заданное давление согласно запросу на гидравлическую тормозную силу. Как результат, формируется гидравлическая тормозная сила с абсолютной величиной согласно запросу на тормозную силу.
Между тем, в случае если электрическая неисправность возникает с учетом отказоустойчивого режима, главные отсечные клапаны 56 переводятся в открытое состояние клапана, клапаны 66 открытия переводятся в закрытое состояние клапана, гидравлическая жидкость из главного цилиндра 42 подается в колесные тормоза 46, и сила водителя, которая должна добавляться на педаль 40 тормоза, т.е. формирование гидравлической тормозной силы с абсолютной величиной согласно рабочей тормозной силе обеспечивается.
D. Конфигурация электрического тормозного устройства
Каждое из электрических тормозных устройств 34 представляет собой тормозное устройство, которое формирует тормозную силу в зависимости от силы электромотора, и, как проиллюстрировано на фиг. 4, выполнено с возможностью включать в себя тормозной суппорт 120 (в дальнейшем также называемый просто "суппортом 120"), в котором актуатор 110 располагается в качестве центрального составляющего элемента, и дисковый ротор 122, служащий в качестве вращающегося узла, который вращается вместе с колесом (задним колесом настоящего варианта осуществления).
i) Конфигурация тормозного суппорта
Суппорт 120 удерживается подвижным способом в осевом направлении (в направлении справа налево чертежа) на держателе (его иллюстрация опускается), предоставленном в ступице (ее иллюстрация опускается), которая удерживает с возможностью вращения колесо таким образом, чтобы разграничивать дисковый ротор 122. Пара тормозных колодок 124a, 124b (в дальнейшем также называемых просто "колодками") удерживается на держателе таким образом, чтобы размещать посередине дисковый ротор 122 в состоянии, в котором его перемещение в осевом направлении разрешается. Каждая из колодок 124a, 124b выполнена с возможностью включать в себя фрикционный элемент 126, расположенный в контакте с дисковым ротором 122, и крепежную пластину 128, которая поддерживает фрикционный элемент 126. Непосредственно колодки 124a, 124b также могут считаться фрикционными элементами.
Для удобства, когда левая сторона на чертеже описывается как передняя часть, и правая сторона на чертеже описывается как задняя часть, колодка 124a на передней стороне поддерживается посредством части 132 зубца, которая представляет собой переднюю концевую часть узла 130 суппорта. Актуатор 110 удерживается таким образом, что кожух 140 актуатора 110 прикрепляется к фрагменту на задней стороне узла 130 суппорта. Актуатор 110 имеет поршень 142, который перемещается вперед и назад относительно кожуха 140, и поршень 142 перемещается вперед, и в силу этого, передняя концевая часть, подробно, его передний конец зацепляется с колодкой 124b на задней стороне, подробно, с крепежной пластиной 128 колодки 124b. Затем, по мере того, как поршень 142 дополнительно перемещается вперед в зацепленном состоянии, и за счет этого колодки 124a, 124b размещают посередине дисковый ротор 122. Другими словами, фрикционный элемент 126 каждой колодки 124a, 124b прижимается к дисковому ротору 122. Тормозная сила для вращения колеса, т.е. тормозная сила для замедления и остановки транспортного средства формируется в зависимости от силы трения между дисковым ротором 122 и фрикционным элементом 126 посредством вышеописанного прижатия.
ii) Конструкция актуатора
Как проиллюстрировано на фиг. 5, актуатор 110 выполнен с возможностью включать в себя электромотор 144, служащий в качестве приводного источника, редукторного механизма 146 для уменьшения частоты вращения электромотора 144, входной вал 148, вращающийся посредством вращения электромотора 144 с уменьшенной частотой через редукторный механизм 146, рабочий механизм 150 преобразования, который преобразует вращение входного вала 148, т.е. вращение электромотора 144, в перемещение вперед и назад поршня 142, и т.п., в дополнение к кожуху 140 и поршню 142. В нижеприведенном описании, для удобства, левая сторона чертежа называется "передней частью", правая сторона чертежа называется "задней частью", перемещение поршня 142 влево называется "перемещением вперед", и перемещение поршня 142 вправо называется "перемещением назад". Кроме того, вращение входного вала 148 и электромотора в направлении, в котором поршень 142 перемещается вперед, называется "нормальным вращением", и вращение входного вала 148 и электромотора в направлении, в котором поршень 142 перемещается назад, называется "обратным вращением".
Поршень 142 выполнен с возможностью включать в себя головку 152 поршня и выходной цилиндр 154, который представляет собой часть полой трубки поршня 142, в то время как электромотор 144 имеет цилиндрический ведущий вращательный вал 156. Выходной цилиндр 154 располагается внутри ведущего вращательного вала 156, а входной вал 148, соответственно, находится внутри выходного цилиндра 154, так что выходной цилиндр 154 и входной вал 148 располагаются таким образом, что они являются коаксиальными друг с другом. Подробно, ведущий вращательный вал 156, выходной цилиндр 154 и входной вал 148 располагаются таким образом, что их оси становятся осью L, которая представляет собой ось, общую с ними. Как результат, настоящий актуатор 110 получается компактным.
Ведущий вращательный вал 156 удерживается посредством кожуха 140 таким образом, что он является вращающимся через радиальный подшипник 158 и неподвижным в осевом направлении (в направлении, в котором идет ось L, и в направлении справа налево на чертеже). Электромотор 144 выполнен с возможностью включать в себя магниты 160, расположенные по всей окружности на внешней периферии ведущего вращательного вала 156, и катушку 162, прикрепленной к внутренней периферии кожуха 140 таким образом, чтобы окружать магниты 160.
Редукторный механизм 146 представляет собой планетарный редукторный механизм, выполненный с возможностью включать в себя полую солнечную шестерню 164, неподвижно присоединяемую к заднему концу ведущего вращательного вала 156, коронную шестерню 166, прикрепленную к кожуху 140, и множество планетарных шестерней 168 (только одна проиллюстрирована на чертеже), которые вводятся в зацепление с солнечной шестерней 164 и коронной шестерней 166, и обращаются вокруг солнечной шестерни 164. Каждая из планетарных шестерней 168 удерживается посредством фланца 170, служащего в качестве водила, таким образом, что она является вращающейся на его оси. Входной вал 148 формируется таким образом, что передний вал 172, составляющий фрагмент на его передней стороне, и задний вал 174, составляющий фрагмент на его задней стороне, зацепляются с помощью резьбы друг с другом, и фланец 170 размещается посередине и закрепляется между передним валом 172 и задним валом 174 и за счет этого вращается как единое целое с передним валом 172 и задним валом 174, т.е. как единое целое с входным валом 148. Вращение ведущего вращательного вала 156, т.е. вращение электромотора 144, уменьшается по частоте и передается в качестве вращения входного вала 148 через редукторный механизм 146, сконфигурированный так, как описано выше. В этой связи, входной вал 148 поддерживается посредством кожуха 140 через фланец 170, упорный подшипник 176 и опорную пластину 178 таким образом, что он является вращающимся и неподвижным в осевом направлении.
Винт 180 с наружной резьбой формируется на внешней периферии переднего вала 172 входного вала 148, в то время как винт 182 с внутренней резьбой, зацепленный с помощью резьбы с винтом 180 с наружной резьбой, формируется внутри выходного цилиндра 154. Таким образом, входной вал 148, в котором формируется винт 180 с наружной резьбой, функционирует в качестве вращающегося элемента, который является вращающимся посредством вращения электромотора 144, выходной цилиндр 154, в котором формируется винт 182 с внутренней резьбой, функционирует в качестве элемента с прямолинейным движением, задается подвижным вперед и назад, чтобы перемещать поршень 142 вперед и назад, рабочий механизм 150 преобразования выполнен с возможностью включать в себя входной вал 148 и выходной цилиндр 154. В этой связи, в настоящем актуаторе 110, можно считать, что элемент с прямолинейным движением и поршень интегрируются друг с другом.
Трапециевидные винты приспосабливаются в качестве винтов, имеющих относительно высокую прочность для винта 180 с наружной резьбой и винта 182 с внутренней резьбой, и смазка для обеспечения плавности работы рабочего механизма 150 преобразования, т.е. работы актуатора 110, размещается в качестве смазочного материала между винтом 180 с наружной резьбой и винтом 182 с внутренней резьбой. Хотя рабочий механизм преобразования, в котором винт с наружной резьбой формируется во вращающемся элементе, и винт с внутренней резьбой формируется в элементе с прямолинейным движением, приспосабливается в настоящем актуаторе 110, также можно формировать актуатор посредством приспособления рабочего механизма преобразования, в котором винт с внутренней резьбой формируется во вращающемся элементе, и винт с наружной резьбой формируется в элементе с прямолинейным движением.
Как можно понять из вышеприведенного описания, в настоящем актуаторе 110, поршень 142 перемещается вперед и назад посредством вращения электромотора 144. Состояние, проиллюстрированное на чертеже, представляет собой состояние, в котором поршень 142 расположен в позиции (в дальнейшем также называемой просто "заданной конечной позицией перемещения назад"), ближайшей к задней концевой стороне в диапазоне перемещения. Подробно, когда электромотор 144 нормально вращается из этого состояния, поршень 142 перемещается вперед, и, как можно понять на фиг. 4, колодки 124a, 124b прижимаются к дисковому ротору 122 в состоянии, в котором передний конец поршня 142 зацепляется с колодкой 124b, и формируется тормозная сила. В этой связи, абсолютная величина тормозной силы составляет абсолютную величину согласно электрическому току, который должен подаваться в электромотор 144. После этого, когда электромотор 144 вращается в обратном направлении, поршень 142 перемещается назад, зацепление между поршнем 142 и колодкой 124b прекращается, переводится в состояние, в котором тормозная сила не формируется, и в завершение, поршень 142 возвращается в заданную конечную позицию перемещения назад, проиллюстрированную на фиг. 5.
В дополнение к составляющим элементам, описанным выше, в настоящем актуаторе 110, круговой датчик 188 позиции предоставляется в качестве датчика угла вращения электромотора для определения угла поворота электромотора 144. Можно обнаруживать позицию и расстояние перемещения поршня 142 в осевом направлении, строго, позицию вращения входного вала 148, на основе сигнала определения кругового датчика 188 позиции. Датчик 190 осевой силы (датчик нагрузки) для определения силы в направлении осевого давления, т.е. осевой силы (осевой нагрузки), которая действует на входной вал 148, располагается между опорной пластиной 178 и упорным подшипником 176. Эта осевая сила является эквивалентной силе, с которой поршень 142 прижимает тормозную колодку 124b к дисковому ротору 122, и можно определять тормозную силу, сформированную из электрического тормозного устройства 34, на основе значения определения датчика 190 осевой силы.
В настоящем актуаторе 110, также предоставляется механизм для запрета вращения входного вала 148, чтобы демонстрировать функцию в качестве электрического парковочного тормоза. Подробно, храповой зуб 192 шестерни формируется на внешней периферии фланца 170, в то время как верхушка фланца 170 содержит плунжер 196, имеющий стопорящий зубец 194 для стопорения храпового зуба 192 шестерни, и соленоид 198, прикрепленный к внешней периферии кожуха 140, чтобы перемещать плунжер 196 вперед и назад. Электромотор 144 нормально вращается, чтобы перемещать поршень 142 вперед и стопорить храповой зуб 192 шестерни относительно стопорящего зубца 194, в состоянии, в котором соленоид 198 намагничен, чтобы выталкивать плунжер 196. Даже когда намагничивание соленоида 198 прекращается в застопоренном состоянии, перемещение назад поршня 142 запрещается. В случае если стопорение прекращается посредством стопорящего зубца 194, электромотор 144 может нормально вращаться, при этом соленоид 198 переводится в ненамагниченное состояние.
Например, в случае если электрический ток в электромотор 144 отсекается в состоянии, в котором поршень 142 перемещается вперед, и тормозная сила формируется, поршень 142 не может перемещаться назад, и состояние, в котором тормозная сила формируется, продолжается. Если предположить такой случай, настоящий актуатор 110 включает в себя механизм, который перемещает поршень 142 назад с силой упругости, демонстрируемой из упругого тела, т.е. смещающий механизм 200, который прикладывает силу смещения при вращении (также может называться "вращательным крутящим моментом") в направлении, в котором поршень 142 перемещается назад, ко входному валу 148.
Более конкретно, смещающий механизм 200 выполнен с возможностью включать в себя внешнее кольцо 202, прикрепленное к кожуху 140, внутреннее кольцо 204, прикрепленное к заднему валу 174 входного вала 148 таким образом, что оно вращается как единое целое с входным валом, и расположенное во внешнем кольце 202, и спиральную пружину 206 (может называться "плоской спиральной пружиной" или "силовой пружиной"), служащую в качестве упругого тела, расположенного между фрагментами, обращенными друг к другу в каждом из внешнего кольца 202 и внутреннего кольца 204. Спиральная пружина 206 практически не деформируется упруго, как проиллюстрировано на фиг. 6A, в состоянии, проиллюстрированном на фиг. 5, т.е. в состоянии, в котором поршень 142, расположен в вышеописанной заданной конечной позиции перемещения назад, и спиральная пружина 206 переводится в состояние, в котором сила упругости, в общем, не формируется. По мере того, как входной вал 148 вращается, и поршень 142 перемещается вперед посредством электромотора 144 из вышеописанного состояния, как проиллюстрировано на фиг. 6B, спиральная пружина 206 постепенно наматывается и закрепляется, чтобы формировать силу упругости. Таким образом, сила упругости с абсолютной величиной согласно величине перемещения вперед, на которую поршень 142 перемещен вперед из заданной конечной позиции перемещения назад, выступает в качестве силы смещения, которая сопротивляется перемещению вперед поршня 142, которая представляет собой силу смещения в направлении, в котором поршень 142 перемещается назад. Другими словами, сила смещения, которая прилагается к входному валу 148 посредством спиральной пружины 206, увеличивается по мере того, как поршень 142 перемещается вперед. Поршень 142 может перемещаться назад даже в случае, если поршень 142 не может перемещаться назад посредством электромотора 144 в состоянии, в котором поршень 142 перемещается вперед посредством силы смещения при вращении, как описано выше, чтобы формировать тормозную силу.
В рабочем механизме 150 преобразования, описанном выше, обратная эффективность (эффективность, когда входной вал 148 вращается посредством перемещения вперед и назад поршня 142) меньше по сравнению с нормальной эффективностью (эффективностью, когда поршень 142 перемещается вперед и назад посредством вращения входного вала 148). Тем не менее, поскольку ведущие углы винта 180 с наружной резьбой и винта 182 с внутренней резьбой увеличены в некоторой степени, обеспечивается обратная эффективность, имеющая определенную степень с абсолютной величиной. Следовательно, в случае если поршень 142 имеет намерение поддерживаться в промежуточной позиции диапазона перемещения, только электрический ток достаточный для того, чтобы формировать силу, которая сопротивляется силе смещения, вызываемой посредством смещающего механизма 200, подается в электромотор 144.
В конфигурации, описанной выше, электрическое тормозное устройство 34 формирует тормозную силу для прекращения вращения заднего колеса 10R, т.е. тормозную силу для торможения транспортного средства (в дальнейшем также называемую просто "электрической тормозной силой"), с использованием силы трения. Как проиллюстрировано на фиг. 1, электрический ток подается из аккумулятора 220 вспомогательного оборудования, который представляет собой аккумулятор, отдельный от аккумулятора 28, в электромотор 144 каждого из электрических тормозных устройств 34.
E. Базовое управление тормозной системой
i) Система управления
Управление настоящей тормозной системой, подробно, управление тормозной силой F (общее название различных тормозных сил) выполняется посредством системы управления, проиллюстрированной на фиг. 1. В частности, управление гидравлическим тормозным устройством 32 выполняется посредством электронного модуля 230 управления для гидравлического тормозного устройства (в дальнейшем также называемого просто "HY-ECU"), и управление каждым электрическим тормозным устройством 34 выполняется посредством электронного модуля 232 управления для электрического тормозного устройства (в дальнейшем также называемого просто "EM-ECU"), которое представляет собой составляющий элемент каждого электрического тормозного устройства 34. HY-ECU 230 выполнен с возможностью включать в себя компьютер, приводные механизмы (схемы приведения в действие) для соответствующих устройств, которые составляют гидравлическое тормозное устройство 32, инвертор, и т.п. EM-ECU 232 функционирует в качестве контроллера в электрическом тормозном устройстве 34 и выполнен с возможностью включать в себя компьютер, приводные механизмы (схемы приведения в действие) для соответствующих устройств, которые составляют электрическое тормозное устройство 34, инвертор, и т.п. Как описано выше, управление рекуперативным тормозным устройством 30 выполняется посредством HB-ECU 29.
Более конкретно, HB-ECU 29 осуществляет управление инверторами 26G, 26M, составляющими рекуперативное тормозное устройство 30, HY-ECU 230 осуществляет управление главными отсечными клапанами 56, регулирующими фиксирующими клапанами 64, клапанами 66 открытия обратного канала и электромотором 62 насосного устройства 73, которое имеет модуль 44 актуатора, составляющий гидравлическое тормозное устройство 32, и EM-ECU 232 выполняет управление электромотором 144 электрического тормозного устройства 34, за счет этого управляя рекуперативной тормозной силой FRG для передних колес 10F, гидравлической тормозной силой FHY для передних колес 10F и электрической тормозной силой FEM для каждого из двух задних колес 10R. Как описано выше, суммированная тормозная сила FSUM, которая представляет собой тормозную силу F, которая должна прикладываться ко всему транспортному средству, управляется. В настоящей тормозной системе транспортного средства, HB-ECU 29, HY-ECU 230 и EM-ECU 232 соединяются между собой в сети (CAN) в транспортном средстве и выполнены с возможностью иметь соответствующие виды управления. HY-ECU 230 функционирует в качестве основного электронного модуля управления, который также контролирует HB-ECU 29 и EM-ECU 232, в настоящей тормозной системе, как описано ниже.
Транспортное средство, на котором монтируется настоящая тормозная система, выполнено с возможностью допускать выполнение автоматического движения при следовании за едущим впереди транспортным средством или предотвращения столкновения транспортного средства. Таким образом, транспортное средство имеет систему автономной работы, которая обеспечивает автономный режим работы транспортного средства (также может называться "автономным вождением"), и электронный модуль 233 управления в автономном режиме работы транспортного средства (в дальнейшем также называемый просто "AO-ECU"), который формирует ядро системы, монтируется на транспортном средстве. AO-ECU 233 выполняет автономный режим работы транспортного средства на основе информации из периферийной системы мониторинга (также может считаться фрагментом системы автономной работы), предоставленной в транспортном средстве. В автономном режиме работы, например, в случае если расстояние между транспортными средствами относительно едущего впереди транспортного средства сокращается, или вероятность столкновения с помехой увеличивается, выполняется запрос на торможение, который не основан на намерении водителя, т.е. запрос на автоматическое торможение. Этот запрос передается как сигнал относительно требуемой суммированной тормозной силы FSUM (описывается ниже) из AO-ECU 233 в HY-ECU 230. В этой связи, один контроллер тормозной системы выполнен с возможностью включать в себя HB-ECU 29, HY-ECU 230, EM-ECU 232 и AO-ECU 233, и также можно считать, что фрагмент контроллера функционирует в качестве контроллера электрического тормозного устройства 34.
ii) Базовое управление тормозной силой
Базовое управление (в дальнейшем также называемое просто "управлением тормозной силой") для тормозной силы в настоящей тормозной системе выполняется следующим образом. Запрос на тормозную силу, намеченный водителем, получается на основе рабочей величины δ нажатия педали тормоза, которая индексирует запрос. В настоящей тормозной системе, как проиллюстрировано на фиг. 1, датчик 234 хода для определения величины хода педали 40 тормоза в качестве рабочей величины δ нажатия педали тормоза предоставляется, и запрос на тормозную силу водителя для всего транспортного средства, т.е. требуемая суммированная тормозная сила FSUM*, которая представляет собой тормозную силу F (сумму тормозных сил F, прикладываемых к четырем колесам 10), требуемую для всего транспортного средства, определяется на основе определенной рабочей величины δ нажатия педали тормоза. В этой связи, рабочая сила, прикладываемая к педали 40 тормоза водителем, т.е. рабочая тормозная сила также может представлять собой индекс запроса на тормозную силу.
В случае если автоматическое торможение требуется в AO-ECU 233, требуемая суммированная тормозная сила FSUM* определяется, и информация относительно определенной требуемой суммированной тормозной силы FSUM* передается из AO-ECU 233 в HY-ECU 230. В этом случае, HY-ECU 230 выполняет следующую обработку на основе требуемой суммированной тормозной силы FSUM* на основе принимаемой информации.
В настоящей тормозной системе транспортного средства, в широком смысле, предпочтительно формируется рекуперативная тормозная сила FRG, и недостающая тормозная сила FIS, которая не может охватываться посредством рекуперативной тормозной силы FRG требуемой суммированной тормозной силы FSUM*, охватывается посредством гидравлической тормозной силы FHY и электрической тормозной силы FEM. В этой связи, в дальнейшем в этом документе, чтобы упрощать описание, рекуперативная тормозная сила FRG и гидравлическая тормозная сила FHY, соответственно, рассматриваются как сумма тормозных сил F, прикладываемых к двум передним колесам 10F посредством рекуперативного тормозного устройства 30 и гидравлического тормозного устройства 32. Между тем, электрическая тормозная сила FEM рассматривается как тормозные силы, которые отдельно прикладываются к двум задним колесам 10R посредством соответствующих электрических тормозных устройств 34, и сумма отдельных электрических тормозных сил FEM (в дальнейшем также называемых просто "двумя электрическими тормозными силами FEM"), прикладываемых к двум задним колесам 10R, прикладывается ко всему транспортному средству.
Сигнал относительно максимальной рекуперативной тормозной силы FRG-MAX, которая представляет собой рекуперативную тормозную силу FRG, которая может формироваться в предварительно определенный момент времени, передается из HY-ECU 230 в HB-ECU 29. HY-ECU 230 определяет максимальную рекуперативную тормозную силу FRG-MAX в диапазоне, который не превышает требуемую суммированную тормозную силу FSUM* и не превышает максимальную рекуперативную тормозную силу FRG-MAX, в качестве целевой рекуперативной тормозной силы FRG*. Затем, HY-ECU 230 вычитает целевую рекуперативную тормозную силу FRG* из требуемой суммированной тормозной силы FSUM*, за счет этого определяя недостающую тормозную силу FIS. Чтобы охватывать недостающую тормозную силу FIS посредством гидравлической тормозной силы FHY и двух электрических тормозных сил FEM, подробно, чтобы охватывать недостающую тормозную силу FIS таким образом, чтобы получать коэффициент (βHY:βEM) распределения, в котором задается сумма гидравлической тормозной силы FHY и двух электрических тормозных сил FEM, HY-ECU 230 умножает недостающую тормозную силу FIS на коэффициент βHY распределения гидравлической тормозной силы и коэффициент βEM распределения электрической тормозной силы (βHY+βEM =1), соответственно, за счет этого определяя целевую гидравлическую тормозную силу FHY* и целевые электрические тормозные силы FEM* в качестве гидравлической тормозной силы FHY и соответствующих электрических тормозных сил FEM, которые должны формироваться. Сигналы относительно целевых электрических тормозных сил FEM* передаются из HY-ECU 230 в EM-ECU 232. В этой связи, чтобы упрощать описание, в принципе, предполагается, что электрические тормозные силы FEM для правого и левого задних колес 10R равны друг другу, и целевые электрические тормозные силы FEM* также определяются как равные друг другу, если не указано иное.
Рекуперативное тормозное устройство 30, гидравлическое тормозное устройство 32 и два электрических тормозных устройства 34 управляются на основе целевой рекуперативной тормозной силы FRG*, целевой гидравлической тормозной силы FHY* и целевых электрических тормозных сил FEM*, соответственно. Подробно, сигнал относительно целевой рекуперативной тормозной силы FRG* отправляется в HB-ECU 29, HB-ECU 29 управляет инвертором 26M таким образом, что рекуперативная тормозная сила FRG становится целевой рекуперативной тормозной силой FRG*, HY-ECU 230 управляет электрическими токами, которые должны подаваться в регулирующие фиксирующие клапаны 64, таким образом, что гидравлическая тормозная сила FHY становится целевой гидравлической тормозной силой FHY*, соответствующие EM-ECU 232 двух электрических тормозных устройств 34 управляют подаваемым электрическим током I в электромотор 144 таким образом, что электрическая тормозная сила FEM для одного соответствующего заднего колеса 10R становится целевой электрической тормозной силой FEM*.
Относительно гидравлической тормозной силы FHY, в частности, хотя и является повторением, заданный электрический ток подается в электромотор 62, если требуемая суммированная тормозная сила FSUM* не равна 0, и электрические токи, которые должны подаваться в регулирующие фиксирующие клапаны 64, управляются таким образом, что давления PW в колесном тормозном цилиндре, определенные посредством датчиков 75 давления в колесном тормозном цилиндре, становятся целевыми давлениями PW* в колесном тормозном цилиндре, определенными на основе целевой гидравлической тормозной силы FHY*. Относительно электрических тормозных сил FEM, в частности, электрический ток, который должен подаваться в электромотор 144, управляется таким образом, что осевая сила WS (осевая нагрузка), определенная посредством датчика 190 осевой силы, становится целевой осевой силой WS*, определенной на основе целевых электрических тормозных сил FEM*.
Согласно управлению зависимостью от запроса на тормозную силу, рекуперативная тормозная сила FRG, гидравлическая тормозная сила FHY и соответствующие электрические тормозные силы FEM управляются таким образом, чтобы взаимодействовать друг с другом. В частности, рекуперативная тормозная сила FRG, гидравлическая тормозная сила FHY и электрические тормозные силы FEM совместно управляются таким образом, чтобы охватывать недостающую тормозную силу FIS, которая не может охватываться посредством рекуперативной тормозной силы FRG требуемой суммированной тормозной силы FSUM* с гидравлической тормозной силой FHY для передних колес 10F и электрическими тормозными силами FEM для двух соответствующих задних колес 10R. На основе совместного управления, как описано выше, можно просто поддерживать подходящую требуемую суммированную тормозную силу, например, даже в случае, если скорость движения транспортного средства или состояние заряда аккумулятора 28 колеблется, и рекуперативная тормозная сила колеблется. Гидравлическая тормозная сила FHY и электрические тормозные силы FEM совместно управляются таким образом, что гидравлическая тормозная сила FHY и электрические тормозные силы FEM для двух задних колес 10R формируются с заданным коэффициентом (βHY:βEM) распределения. Согласно такому совместному управлению, поскольку тормозные силы F могут управляться в соответствии с простым законом управления, можно легко управлять подходящими тормозными силами F, требуемыми для всего транспортного средства.
F. Скорость отклика электрического тормозного устройства и предотвращение явления "прихватывания" тормозов
Некоторое запаздывание во времени присутствует в любых тормозных устройствах до тех пор, пока фактическая тормозная сила не формируется после запроса на тормозную силу. Можно сказать, что скорость отклика становится лучше по мере того, как это запаздывание во времени меньше. В случае если запрос на тормозную силу колеблется, требуется, что также превосходно, если фактическая тормозная сила соответствует колебанию без задержки, т.е. способность к соответствию является превосходной, чтобы реализовывать превосходную скорость отклика. С точки зрения, описанной выше, поскольку гидравлическое тормозное устройство 32 тормозной системы управляет каждым насосом 60, когда запрос на тормозную силу возникает, как описано выше, запаздывание во времени является большим. Вследствие того факта, что фрагмент в диапазоне от модуля 44 актуатора до каждого колесного тормоза 46 соединяется посредством относительно длинных трубопроводов для гидравлической жидкости, потеря давления гидравлической жидкости является большой, и способность к соответствию в некоторой степени ухудшается. Напротив, каждое электрическое тормозное устройство 34 может управлять тормозной силой просто посредством управления подаваемым электрическим током в электромотор 144. Следовательно, когда электрическое тормозное устройство 34 и гидравлическое тормозное устройство 32 сравниваются друг с другом по скорости отклика, в общем, скорость отклика электрического тормозного устройства 34 превышает скорость отклика гидравлического тормозного устройства 32.
Между тем, это также относится к каждому колесному тормозу 46 гидравлического тормозного устройства 32. Тем не менее, когда запрос на тормозную силу не возникает в электрическом тормозном устройстве 34, чтобы избегать явления, при котором транспортное средство движется в состоянии, в котором фрикционные элементы 126 тормозных колодок 124a, 124b прижимаются к дисковому ротору 122, т.е. так называемого явления "прихватывания" тормозов, поршень 142, т.е. выходной цилиндр 154, который представляет собой элемент с прямолинейным движением, расположен таким образом, что определенная величина зазора CL предоставляется между фрикционными элементами 126 и дисковым ротором 122. В этой связи, строго, зазор CL может рассматриваться как сумма четырех промежутков, проиллюстрированных на фиг. 4, т.е. промежутка CL1 между частью 132 зубца узла 130 суппорта и крепежной пластиной 128 тормозной колодки 124a, промежутка CL2 между фрикционным элементом 126 тормозной колодки 124a и дисковым ротором 122, промежутка CL3 между дисковым ротором 122 и фрикционным элементом 126 тормозной колодки 124b и промежутка CL4 между крепежной пластиной 128 тормозной колодки 124b и поршнем 142. На фиг. 4, зазоры CL1-CL4 нарисованы увеличенным способом.
С учетом вышеописанной скорости отклика, желательно, если зазор CL является максимально возможно небольшим. В настоящем электрическом тормозном устройстве 34, когда отсутствует запрос на тормозную силу, допускается расположение выходного цилиндра 154 в позиции, в которой максимально возможно небольшой зазор CL присутствует в такой степени, что явление "прихватывания" тормозов не возникает посредством управления электромотором 144 на основе значения определения кругового датчика 188 позиции. В нижеприведенном описании, позиция (также может рассматриваться как позиция поршня 142) в направлении перемещения вперед-назад выходного цилиндра 154, когда максимально возможно небольшой зазор CL присутствует, называется "позицией готовности", и управление определением местоположения выходного цилиндра 154 в позиции готовности, строго, управление для разрешения выходному цилиндру 154 располагаться в позиции готовности и для запрета перемещения назад выходного цилиндра 154 из позиции готовности, называется "управлением в состоянии готовности".
G. Нанесение смазки в электрическом тормозном устройстве, управление в состоянии готовности, управление перемещением назад
В электрическом тормозном устройстве 34, как описано выше, винтовой механизм, состоящий из винта 180 с наружной резьбой, сформированного на входном валу 148, и винта 182 с внутренней резьбой, сформированного в выходном цилиндре 154, приспосабливается в рабочем механизме 150 преобразования актуатора 110. Винт 180 с наружной резьбой и винт 182 с внутренней резьбой представляют собой трапециевидные винты, и как проиллюстрировано в видах в сечении на фиг. 7, зацепляются с помощью резьбы друг с другом в состоянии, в котором смазка 250, которая представляет собой смазочный материал, размещается между ними.
Первая часть по фиг. 7 иллюстрирует состояние, в котором электромотор 144, т.е. входной вал 148, нормально вращается, и поршень 142, т.е. выходной цилиндр 154, перемещается вперед, или состояние, в котором тормозные колодки 124a, 124b прижимаются к дисковому ротору 122, и тормозная сила формируется посредством поршня 142. В этих состояниях, передняя боковая поверхность гребня винта для винта 180 с наружной резьбой (в дальнейшем также называемая просто "передней поверхностью 252 гребня") и передняя боковая поверхность (в дальнейшем также называемая просто "передней поверхностью 254 канавки") канавки винта для винта 182 с внутренней резьбой, сталкивающегося передней поверхностью 252 гребня, входят в контакт между собой, в то время как промежуток присутствует между задней боковой поверхностью (в дальнейшем также называемой просто "задней поверхностью 256 гребня") гребня винта для винта 180 с наружной резьбой и задней боковой поверхностью (в дальнейшем также называемой просто "задней поверхностью 258 канавки") канавки винта для винта 182 с внутренней резьбой, обращенной к задней поверхности 256 гребня. Таким образом, люфт с величиной, эквивалентной разнесению между задней поверхностью 256 гребня и задней поверхностью 258 канавки в первой части по фиг. 7, присутствует между винтом 180 с наружной резьбой и винтом 182 с внутренней резьбой. Когда эта величина называется "величиной BL люфта", величина BL люфта является относительно большой, поскольку винт 180 с наружной резьбой и винт 182 с внутренней резьбой представляют собой трапециевидные винты. Другими словами, относительно большой люфт присутствует в актуаторе 110 электрического тормозного устройства 34.
Как описано выше, с точки зрения скорости отклика, желательно, если зазор CL в случае, если выходной цилиндр 154 расположен в позиции готовности, является максимально возможно небольшим, пока не возникает явления "прихватывания" тормозов. По этой причине, в настоящем электрическом тормозном устройстве 34, зазор CL задается таким образом, что он меньше величины BL люфта в состоянии, в котором выходной цилиндр 154, т.е. поршень 142, расположен в позиции готовности. Таким образом, при управлении в состоянии готовности, в процессе, в котором запрос на тормозную силу снижается, входной вал 148, т.е. электромотор 144 работает с возможностью вращаться в обратном направлении из позиции, в которой тормозная сила не формируется, в такую позицию вращения, что перемещение назад (в дальнейшем также называемую просто "позицией X0 исчезновения тормозной силы") выходного цилиндра 154 относительно входного вала 148 на первое задаваемое расстояние ΔX1 (<BL) разрешается, другими словами, выходной цилиндр 154 не перемещается назад относительно входного вала 148 только на первое задаваемое расстояние ΔX1. Позиция после того, как электромотор 144 выполняет такую операцию вращения, представляет собой позицию, проиллюстрированную во второй части по фиг. 7. В этой связи, во второй части по фиг. 7, нарисована относительная позиция между входным валом 148 и выходным цилиндром 154, когда первое задаваемое расстояние ΔX1 задается равным половине величины BL люфта. При фактическом движении транспортного средства, поскольку выходной цилиндр 154 перемещается назад посредством силы, с которой дисковый ротор 122 подталкивает тормозные колодки 124a, 124b назад, можно сказать, что вторая часть по фиг. 7 иллюстрирует состояние, в котором выходной цилиндр 154 перемещается назад относительно входного вала 148 на первое задаваемое расстояние ΔX1, которое представляет собой максимальное расстояние, разрешенное для того, чтобы перемещаться назад.
Как описано выше, смазка 250 размещается между винтом 180 с наружной резьбой и винтом 182 с внутренней резьбой. Тем не менее, в состоянии, проиллюстрированном в первой части по фиг. 7, смазка 250 выталкивается из-за передней поверхности 252 гребня и передней поверхности 254 канавки и неравномерно распределяется между задней поверхностью 256 гребня и задней поверхностью 258 канавки. С другой стороны, в понятном выражении, вводится состояние, в котором смазка практически не присутствует между передней поверхностью 252 гребня и передней поверхностью 254 канавки. Когда это состояние продолжается в течение относительно длительного времени, смазывающая способность между передней поверхностью 252 гребня и передней поверхностью 254 канавки, т.е. плавность работы электрического тормозного устройства 34 снижается. Поскольку настоящее электрическое тормозное устройство 34 сконструировано таким образом, что вышеописанная обратная эффективность является относительно высокой, снижение плавности становится конкретной проблемой. Даже когда управление в состоянии готовности выполняется, как можно понять из второй части по фиг. 7, выходной цилиндр 154 не перемещается назад относительно входного вала 148 до тех пор, пока задняя поверхность 256 гребня и задняя поверхность 258 канавки не войдут в контакт между собой, и смазка 250, неравномерно распределенная между задней поверхностью 256 гребня и задней поверхностью 258 канавки, в достаточной степени обмазывается между передней поверхностью 252 гребня и передней поверхностью 254 канавки.
С учетом вышеизложенного, в настоящем электрическом тормозном устройстве 34, выполняется управление перемещением назад выходного цилиндра 154 в позицию перемещения назад, в которой зазор CL равен или более величины BL люфта, в подходящее время или на подходящей частоте, т.е. управление перемещением назад. В частности, когда запрос на тормозную силу отменен, либо когда отсутствует запрос на тормозную силу, входной вал 148, т.е. электромотор 144, работает с возможностью вращаться в обратном направлении таким образом, что выходной цилиндр 154, перемещается назад на второе задаваемое расстояние ΔX2 (≥BL) из позиции X0 исчезновения тормозной силы. Третья часть по фиг. 7 иллюстрирует состояние, в котором выходной цилиндр 154 расположен в позиции перемещения назад. В этом состоянии, задняя поверхность 256 гребня и задняя поверхность 258 канавки входят в контакт между собой, и смазка 250, которая неравномерно распределяется между задней поверхностью 256 гребня и задней поверхностью 258 канавки, в достаточной степени обмазывается вокруг промежутка между передней поверхностью 252 гребня и передней поверхностью 254 канавки. Поскольку такое управление перемещением назад выполняется, плавность работы электрического тормозного устройства 34 гарантируется.
В этой связи, при управлении перемещением назад, когда выходной цилиндр 154 перемещается назад за пределы позиции готовности, чтобы перемещать выходной цилиндр 154 назад в позицию перемещения назад, предварительно определяется то, что вышеописанная скорость отклика снижается. Таким образом, при управлении перемещением назад, выходной цилиндр 154 возвращается в позицию готовности после того, как выходной цилиндр 154 перемещается назад в позицию перемещения назад.
В вышеприведенном описании, для простого понимания, управление в состоянии готовности и управление перемещением назад описываются как выполняемые на основе позиции выходного цилиндра 154. Тем не менее, позиция θ вращения электромотора 144 управляется при фактическом управлении актуатором 110. Таким образом, вместо позиции X0 исчезновения тормозной силы первого задаваемого расстояния ΔX1 и второго задаваемого расстояния ΔX2, приспосабливаются позиция θ0 вращения для исчезновения тормозной силы, первая заданная величина Δθ1 вращения и вторая заданная величина Δθ2 вращения, которые представляют собой позицию вращения и величины вращения электромотора 144, эквивалентные позиции исчезновения тормозной силы и первому и второму задаваемым расстояниям, и позиция θ вращения электромотора 144 управляется на основе позиции вращения для исчезновения тормозной силы и первой и второй величин вращения. В описании последовательности операций управления, которая должна выполняться ниже, управление электрическим тормозным устройством 34 описывается с использованием позиции θ0 вращения для исчезновения тормозной силы, первой заданной величины Δθ1 вращения и второй заданной величины Δθ2 вращения.
H. Условие, время, частота и т.п. выполнения управления перемещением назад
В настоящем электрическом тормозном устройстве 34, т.е. в настоящей тормозной системе, вкратце, когда отсутствует запрос относительно электрического тормозного устройства 34, избирательно выполняются управление в состоянии готовности и управление перемещением назад, и два режима из первого режима и второго режима задаются относительно выполнения управления перемещением назад. Первый режим представляют собой просто режим, в котором управление перемещением назад выполняется по мере необходимости, другими словами, режим, в котором частота выполнения управления перемещением назад подавляется таким образом, что она является низкой, и второй режим представляет собой режим, в котором управление перемещением назад выполняется максимально возможно многократно, другими словами, режим, в котором частота выполнения управления перемещением назад является относительно высокой. Согласно первому режиму, можно уменьшать возникновение ситуации, когда прогнозируется вышеописанное снижение скорости отклика. С другой стороны, согласно второму режиму, вышеописанная плавность работы электрического тормозного устройства 34 может гарантироваться в еще более достаточной степени. То, выполняется управление перемещением назад в первом режиме или во втором режиме, может случайно выбираться водителем посредством нажатия рабочего переключателя.
В первом режиме, управление в состоянии готовности и управление перемещением назад избирательно выполняются посредством использования исчезновения запроса на тормозную силу для электрического тормозного устройства 34 в качестве триггера. В частности, в принципе, такое событие, что число n раз (в дальнейшем также называемое просто "подсчитанным числом n торможений"), которое электрическое тормозное устройство 34 формирует тормозную силу после того, как управление в состоянии готовности выполняется, и управление перемещением назад выполняется позже всего, превышает заданное число раз, т.е. заданное подсчитанное число n0 задается в качестве предварительно установленного предварительного условия, и выполнение управления перемещением назад начинается в случае, если предварительно установленное предварительное условие удовлетворяется. Обычно, управление перемещением назад выполняется в случае, если предварительно установленное предварительное условие удовлетворяется на основе предварительно установленного предварительного условия, заданного на основе состояния активации электрического тормозного устройства 34. Подробно, управление перемещением назад может выполняться, когда вводится состояние активации, прогнозирующее то, что плавность работы нарушается до заданного уровня.
В первом режиме, выполнение управления в состоянии готовности или управления перемещением назад начинается, когда запрос на тормозную силу отменен. С другой стороны, во втором режиме, хотя такое событие, что отсутствует запрос на тормозную силу, используется в качестве предварительно установленного предварительного условия, управление перемещением назад выполняется при условии, что заданное допустимое условие удовлетворяется. Подробно, при условии, что транспортное средство находится в ситуации, в которой вероятность операции нажатия педали тормоза водителем является низкой (в дальнейшем также называется просто "в ситуации низкой вероятности операции нажатия педали тормоза"), даже когда выходной цилиндр 154 расположен в позиции готовности посредством управления в состоянии готовности, выполнение управления перемещением назад разрешается в случае, если управление перемещением назад еще не выполнено после того, как запрос на тормозную силу отменен. В частности, когда система определяет нахождение в ситуации, в которой отсутствует риск столкновения с едущим впереди транспортным средством, помехой и т.п., на основе периферийной ситуации, отслеживаемой посредством периферийной системы мониторинга, предоставленной в транспортном средстве, описанном выше, выполнение управления перемещением назад разрешается. Даже в случае, если скорость v движения транспортного средства равна или меньше заданной скорости v0, которая задается относительно низкой, и операция нажатия педали акселератора не выполняется, выполнение управления перемещением назад разрешается. Обычно, то, определяется или нет транспортное средство как находящееся в ситуации вероятности операции нажатия педали тормоза, по меньшей мере, на основе одного из состояния движения транспортного средства и рабочего состояния транспортного средства, и выполнение управления перемещением назад разрешается на основе определения.
Кроме того, во втором режиме, в тормозной системе, в состоянии, в котором сумма тормозной силы, которая должна формироваться посредством гидравлического тормозного устройства 32, и тормозных сил, которые должны формироваться посредством двух электрических тормозных устройств 34, т.е. сумма тормозной силы, требуемой для этих тормозных устройств (эквивалентная вышеописанной недостающей тормозной силе FIS), снижается и равна или меньше заданного уровня (FIS-TH), тормозная сила, требуемая для одного электрического тормозного устройства 34, задается равной 0 посредством вычитания величины ΔFEM уменьшения электрической тормозной силы, и уменьшенная величина добавляется к тормозной силе, требуемой для гидравлического тормозного устройства 32. Как результат, запрос на тормозную силу для одного электрического тормозного устройства 34 отменяется, и вероятность выполнения управления перемещением назад в электрическом тормозном устройстве 34 увеличивается. Таким образом, частота выполнения управления перемещением назад в электрическом тормозном устройстве 34 увеличивается. Чтобы кратко описывать то, уменьшается или нет запрос на тормозную силу для любого из двух электрических тормозных устройств 34, в настоящем втором режиме, уменьшается запрос на тормозную силу для электрического тормозного устройства 34 с большим истекшим временем после того, как управление перемещением назад выполняется. В этой связи, вышеописанное условие представляет собой условие, заданное с точки зрения отсутствия плохого влияния, даже когда скорость отклика одного электрического тормозного устройства 34 снижается вследствие выполнения управления перемещением назад.
В настоящей тормозной системе, задается условие для запрета управления перемещением назад независимо от того, находится транспортное средство в первом режиме или во втором режиме, и управление перемещением назад запрещается в случае, если запрещенное условие удовлетворяется. В частности, в случае если управление перемещением назад выполняется в отдельном электрическом тормозном устройстве 34, которое является другим тормозным устройством, предоставленным в тормозной системе, управление перемещением назад электрического тормозного устройства 34 запрещается, чтобы избегать то, что оба из двух электрических тормозных устройств 34 одновременно выполняют управление перемещением назад. Каждое электрическое тормозное устройство 34 имеет функцию передачи сигнала, указывающего то, что управление перемещением назад выполняется непосредственно, т.е. сигнала, показывающего выполнение управления перемещением назад. Выполнение управления перемещением назад в другом электрическом тормозном устройстве 34 запрещается на основе сигнала.
В случае если определяется то, что управление перемещением назад выполняется в одном из двух электрических тормозных устройств 34, на основе такого сигнала, что выполняется управление повышением скорости отклика, которое представляет собой управление для дополнительного повышения скорости отклика гидравлического тормозного устройства 32, которое представляет собой отдельное тормозное устройство. Как описано выше, в гидравлическом тормозном устройстве 32, в принципе, насосы 60 модуля 44 актуатора работают, когда имеется запрос на тормозную силу. Тем не менее, когда управление перемещением назад выполняется в одном из электрических тормозных устройств 34, насосы 60 приводятся в действие (в дальнейшем также называется просто "заблаговременной работой насоса"), даже когда отсутствует запрос на тормозную силу для гидравлического тормозного устройства 32. Таким образом, время начала работы насосного устройства 73 продвигается вперед. Как результат, сокращается вышеописанное запаздывание во времени, улучшается задержка при формировании тормозной силы посредством гидравлического тормозного устройства 32, и предотвращается снижение скорости отклика всей тормозной системы.
При управлении повышением скорости отклика, тормозная сила, сформированная посредством гидравлического тормозного устройства 32, формируется, повышается при условии, что один запрос на тормозную силу продолжается. В частности, корректирующее усиление GHY гидравлической тормозной силы, которое представляет собой усиление для коррекции запроса на тормозную силу для гидравлического тормозного устройства 32, т.е. целевой гидравлической тормозной силы FHY*, описанной выше, увеличивается, и давление гидравлической жидкости, которая должна подаваться в каждый колесный тормоз 46 посредством устройства 74 управляемой подачи гидравлического давления, задается высоким. В этой связи, корректирующее усиление GHY гидравлической тормозной силы представляет собой коэффициент, который корректирует целевую гидравлическую тормозную силу FHY* посредством умножения целевой гидравлической тормозной силы FHY*, задается равным 1 в случае, если управление перемещением назад не выполняется в любом электрическом тормозном устройстве 34, и задается равным значению, большему 1, в случае, если управление перемещением назад выполняется в одном из электрических тормозных устройств 34. Соответственно, улучшается способность к соответствию тормозной силы, фактически сформированной относительно колебаний запроса на тормозную силу для гидравлического тормозного устройства 32, и предотвращается снижение скорости отклика всей тормозной системы.
Характеристики гидравлической тормозной силы FHY, фактически сформированной относительно запроса на тормозную силу посредством управления повышением скорости отклика, изменяются, как проиллюстрировано на графике по фиг. 8. Штрихпунктирная линия с двумя точками на графике представляет запрос на тормозную силу, т.е. целевую гидравлическую тормозную силу FHY*, и сплошная линия представляет характеристики гидравлической тормозной силы FHY, сформированной в случае, если управление повышением скорости отклика не выполняется. Напротив, в случае если управление повышением скорости отклика выполняется, гидравлическая тормозная сила FHY показывает характеристики, как указано посредством пунктирной линии. Из этого графика, можно видеть, что вследствие выполнения управления повышением скорости отклика, время повышения гидравлической тормозной силы FHY продвигается вперед, и градиент увеличения гидравлической тормозной силы FHY после повышения также становится большим. В качестве управления повышением скорости отклика, может выполняться только одно из продвижения вперед времени начала работы насосного устройства 73 и повышения тормозной силы, сформированной посредством гидравлического тормозного устройства 32.
I. Последовательность операций управления тормозной системой
Управление каждым электрическим тормозным устройством 34, включающее в себя управление в состоянии готовности и управление перемещением назад, выполняется по мере того, как EM-ECU 232, который представляет собой контроллер каждого электрического тормозного устройства 34, многократно выполняет управляющую программу электрического тормозного устройства (включающую в себя вложенную процедуру управления перемещением назад, проиллюстрированную на блок-схеме последовательности операций способа по фиг. 10), проиллюстрированную на блок-схеме последовательности операций способа по фиг. 9, с коротким временным шагом (от нескольких мс до нескольких десятков мс), и всестороннее управление тормозной системой, к примеру, определение запроса на тормозную силу для каждого тормозного устройства и управление гидравлическим тормозным устройством 32 выполняется по мере того, как HY-ECU 230 многократно выполняет управляющую программу тормоза, проиллюстрированную на блок-схеме последовательности операций способа по фиг. 11, с коротким временным шагом (от нескольких мс до нескольких десятков мс). В дальнейшем в этом документе, последовательно описывается обработка средств управления согласно этим программам на блок-схемах последовательности операций способа.
i) Обработка управления электрического тормозного устройства
Для описания обработки управления электрического тормозного устройства 34, во-первых, то, имеется или нет запрос на тормозную силу для него, определяется на этапе 1 (в дальнейшем также называемом просто "S1", это применимо и к другим этапам). В частности, определяется то, больше 0 или нет целевая электрическая тормозная сила FEM*, которая представляет собой запрос на тормозную силу.
В случае если имеется запрос на тормозную силу на этапе S2, определяется то, повышается или нет запрос на тормозную силу, т.е. то, превышает или нет 0 целевая электрическая тормозная сила FEM* при текущем выполнении программы. В случае если запрос на тормозную силу повышается на этапе S3, вышеописанное подсчитанное число n торможений подсчитывается в прямом направлении. На этапе S4, как описано выше, выполняется управление с обратной связью электрической тормозной силы FEM на основе целевой электрической тормозной силы FEM*. В частности, подаваемый электрический ток I в электромотор 144 управляется на основе осевой силы WS, определенной посредством датчика 190 осевой силы таким образом, что электрическая тормозная сила FEM становится целевой электрической тормозной силой FEM*.
Затем, флаг FBF завершения управления перемещением назад сбрасывается на этапе S5. Флаг FBF завершения управления перемещением назад представляет собой флаг, показывающий то, завершено уже или нет выполнение управления перемещением назад после того, как запрос на тормозную силу отменен, и представляет собой флаг, для которого значение флага задается равным 1 в случае, если выполнение управления перемещением назад завершается, и значение флага задается равным 0 в случае, если выполнение управления перемещением назад не завершается. На этапе S6, определяется то, достигает или нет фактически сформированная электрическая тормозная сила FEM 0 при выполнении программы. В случае если фактически сформированная электрическая тормозная сила FEM достигает 0 в это время, на этапе S7, позиция выходного цилиндра 154 считается расположенной в позиции X0 исчезновения тормозной силы, и позиция θ вращения электромотора 144 задается равной позиции θ0 вращения для исчезновения тормозной силы.
В случае если выполняется определение в отношении того, что отсутствует запрос на тормозную силу на этапе S1, на этапе S8, определяется значение флага FPB запрета на управление перемещением назад. Флаг FPB запрета на управление перемещением назад представляет собой флаг для запрета одновременного выполнения управления перемещением назад в двух электрических тормозных устройствах 34. Как описано ниже, в HY-ECU 230, значение флага задается равным 1, когда управление перемещением назад выполняется в другом электрическом тормозном устройстве 34, и задается равным 0, когда управление перемещением назад не выполняется.
В случае если определяется то, что управление перемещением назад не запрещено в электрическом тормозном устройстве 34, посредством значения флага FPB запрета на управление перемещением назад, на этапе S9, определяется то, представляет собой режим выполнения управления перемещением назад вышеописанный первый режим или вышеописанный второй режим, на основе флага FM режима. Флаг FM режима представляет собой флаг, для которого значение флага задается равным 0 в случае, если выбирается первый режим, и для которого значение флага задается равным 1 в случае, если выбирается второй режим. В случае если выбирается первый режим, на этапе S10, определяется то, превышает или нет подсчитанное число n торможений заданное подсчитанное число n0. В случае n≤n0, управление в состоянии готовности на этапе S14 и на следующем этапе выполняется, и в случае n>n0, на этапе S13, определяется то, завершено уже или нет управление перемещением назад после того, как запрос на тормозную силу отменен, на основе значения флага FBF завершения управления перемещением назад. В случае если управление перемещением назад уже завершено, и управление в состоянии готовности после S14 и следующих этапов еще не завершено, управление перемещением назад по S16 выполняется.
В случае если определяется то, что второй режим выбирается на этапе S9, на этапе S11, независимо от того, является или нет периферийная ситуация понятной, т.е. независимо от того, присутствует или нет помеха, едущее впереди транспортное средство и т.п., которое может иметь вероятность столкновения с транспортным средством, на основе определения периферийной системы мониторинга в качестве допустимого условия управления перемещением назад. На этапе S12, то, равна или меньше либо нет скорость v движения транспортного средства заданной скорости v0, и то, выполняется или нет операция нажатия педали акселератора, определяется в качестве другого допустимого условия управления перемещением назад. В случае если ни одно из двух допустимых условий S11 и S12 не удовлетворяется, управление в состоянии готовности на этапе S14 и на следующем этапе выполняется. В случае если ни одно из двух допустимых условий не удовлетворяется, на этапе S13, определяется то, завершено уже или нет управление перемещением назад после того, как запрос на тормозную силу отменен, на основе значения флага FBF завершения управления перемещением назад. Управление в состоянии готовности на этапе S14 и на следующем этапе выполняется в случае, если управление перемещением назад уже завершено, и управление перемещением назад на этапе S16 выполняется в случае, если управление перемещением назад еще не завершено. В случае если определяется то, что управление перемещением назад запрещено, на этапе S8, управление в состоянии готовности на этапе S14 и на следующем этапе выполняется.
При управлении в состоянии готовности, во-первых, на этапе S14, целевая позиция θ* вращения электромотора определяется посредством вычитания первой заданной величины Δθ1 вращения из позиции θ0 вращения для исчезновения тормозной силы. Затем, на этапе S15, выполняется управление с обратной связью, при котором фактическая позиция θ вращения электромотора становится определенной целевой позицией θ* вращения электромотора. Таким образом, подаваемый электрический ток I в электромотор 144 согласно управлению с обратной связью определяется, и подаваемый электрический ток I подается в электромотор 144. При управлении в состоянии готовности в случае, если разрешается перемещение назад в позицию готовности выходного цилиндра 154, и выходной цилиндр 154 уже находится в позиции готовности, позиция поддерживается.
Управление перемещением назад по S16 выполняется посредством выполнения вложенной процедуры управления перемещением назад, проиллюстрированной на блок-схеме последовательности операций способа по фиг. 10. В обработке согласно этой вложенной процедуре, во-первых, на этапе S21, определяется то, начинается или нет управление перемещением назад, при выполнении этой программы на основе вышеописанного флага FBF завершения управления перемещением назад. В частности, определяется то, представляет собой или нет выполнение текущей вложенной процедуры управления перемещением назад первое выполнение в состоянии, в котором значение флага для флага FBF завершения управления перемещением назад равно 0.
В случае если определяется то, что управление перемещением назад начинается, на этапе S21, на этапе S22, значение флага для флага FBC во время перемещения назад поршня задается равным 1. Флаг FBC во время перемещения назад поршня представляет собой флаг, для которого значение флага задается равным 1 в случае, если поршень 142, т.е. выходной цилиндр 154, находится в середине перемещения назад вплоть до вышеописанной позиции перемещения назад, и значение флага задается равным 0 в случае, если поршень 142 не находится в середине перемещения назад. На этапе S23, тот факт, что управление перемещением назад начато в электрическом тормозном устройстве 34, т.е. непосредственно, выдается в HY-ECU 230. С другой стороны, в случае если определяется то, что поршень 142 уже перемещен назад, на этапе S21, S22 и S23 пропускаются.
На следующем S24, определяется то, перемещается или нет поршень 142 назад, на основе значения флага для флага FBC во время перемещения назад поршня. В случае если выходной цилиндр 154 находится в середине перемещения назад на этапе S25, целевая позиция θ* вращения электромотора определяется посредством вычитания второй заданной величины Δθ2 вращения из позиции θ0 вращения для исчезновения тормозной силы. Таким образом, определяется целевая позиция θ* вращения электромотора для перемещения выходного цилиндра 154 назад в вышеописанную позицию перемещения назад. С другой стороны, в случае если поршень 142 не перемещается назад, т.е. после того, как выходной цилиндр 154 достигает позиции перемещения назад на этапе S26, целевая позиция θ* вращения электромотора определяется посредством вычитания первой заданной величины Δθ1 вращения из полученной позиции θ0 вращения для исчезновения тормозной силы. Таким образом, после того, как поршень перемещается назад, определяется целевая позиция θ* вращения электромотора для возврата выходного цилиндра 154, чтобы перемещать выходной цилиндр 154 вперед вплоть до позиции готовности. Затем, на этапе S27, управление с обратной связью, при котором фактическая позиция θ вращения электромотора становится определенной целевой позицией θ* вращения электромотора на основе целевой позиции θ* вращения электромотора, определенной посредством S25 или S26.
В случае если определяется то, что поршень 142 перемещается назад, на этапе S28, на этапе S29 определяется то, достигает или нет фактическая позиция θ вращения электромотора целевой позиции θ* вращения электромотора посредством управления с обратной связью, т.е. то, перемещен или нет выходной цилиндр 154 назад вплоть до позиции перемещения назад. В случае если фактическая позиция θ вращения электромотора достигает целевой позиции θ* вращения электромотора на этапе S30, значение флага для флага FBC во время перемещения назад поршня сбрасывается до 0.
С другой стороны, при определении по S28, в случае если определяется то, что поршень 142 не перемещается назад, на этапе S31, определяется то, достигает или нет фактическая позиция θ вращения электромотора целевой позиции θ* вращения электромотора посредством управления с обратной связью, т.е. то, перемещен или нет выходной цилиндр 154 вперед вплоть до позиции готовности. В случае если фактическая позиция θ вращения электромотора достигает целевой позиции θ* вращения электромотора, такое событие, что управление перемещением назад завершается, выдается в HY-ECU 230 на этапе S32, флаг FBF завершения управления перемещением назад задается равным 1 на этапе S33, и подсчитанное число n торможений сбрасывается на этапе S34.
ii) Всесторонняя обработка управления тормозной системы
Для описания всесторонней обработки управления тормозной системы, во-первых, на этапе S41, определяется то, выполняется или нет управление перемещением назад в одном из двух электрических тормозных устройств 34, на основе выдачи начала и завершения выполнения управления перемещением назад из каждого электрического тормозного устройства 34.
В одном электрическом тормозном устройстве 34, в случае если управление перемещением назад выполняется на этапе S42, значение флага для флага FPB запрета на управление перемещением назад другого электрического тормозного устройства 34 задается равным 1, и управление перемещением назад в электрическом тормозном устройстве 34 запрещается. Затем, на этапе S43, насосы 60 гидравлического тормозного устройства 32 работают заблаговременно, и корректирующее усиление GHY гидравлической тормозной силы увеличивается, как описано выше. Таким образом, вышеописанное управление повышением скорости отклика выполняется для гидравлического тормозного устройства 32 посредством обработки по S43. Хотя опускается на блок-схеме последовательности операций способа, корректирующее усиление GHY гидравлической тормозной силы возвращается к нормальному значению, т.е. 1, когда один запрос на тормозную силу отменен.
На этапе S41, в случае, если определяется то, что управление перемещением назад не выполняется даже в любом электрическом тормозном устройстве 34, значения флага для флагов FPB запрета на управление перемещением назад обоих из электрических тормозных устройств 34 задаются равными 0 на этапе S44, и заблаговременная работа насосов 60 гидравлического тормозного устройства 32 запрещается на этапе S45.
На следующем S46, как описано относительно управления базовой тормозной силой, требуемая суммированная тормозная сила FSUM* определяется на основе присутствия или отсутствия запроса на тормозную силу посредством автоматического торможения из AO-ECU 233 или присутствия или отсутствия запроса на тормозную силу посредством операции нажатия 40 педали тормоза водителя. В этой связи, в случае если отсутствует запрос на тормозную силу, требуемая суммированная тормозная сила FSUM* определяется в качестве 0. На следующем S47, аналогично вышеприведенному описанию, получается максимальная рекуперативная тормозная сила FRG-MAX, определяется недостающая тормозная сила FIS, определяются целевая рекуперативная тормозная сила FRG*, целевая гидравлическая тормозная сила FHY* и целевые электрические тормозные силы FEM*, которые представляют собой запросы на тормозную силу для соответствующих тормозных устройств. Затем, на этапе S48, целевая гидравлическая тормозная сила FHY* корректируется на основе корректирующего усиления GHY гидравлической тормозной силы. В случае если управление повышением скорости отклика не выполняется, целевая гидравлическая тормозная сила FHY* поддерживается равной значению, определенному на этапе S47.
Затем, на этапе S49, в случае если определяется то, представляет собой режим выполнения управления перемещением назад первый режим или второй режим, и в случае, если режим выполнения представляет собой второй режим, на этапе S50, определяется то, удовлетворяется или нет такое условие, что недостающая тормозная сила FIS, которая представляет собой сумму целевой гидравлической тормозной силы FHY* и целевых электрических тормозных сил FEM* для задних колес 10R, находится в процессе снижения, и недостающая тормозная сила FIS равна или меньше заданного уровня FIS-TH. В случае если условие удовлетворяется на этапе S51, целевая электрическая тормозная сила FEM* для одного электрического тормозного устройства 34 уменьшается на величину θFEM уменьшения электрической тормозной силы и задается равной 0, и целевая гидравлическая тормозная сила FHY* увеличивается на дельту FEM величины уменьшения электрической тормозной силы.
После того, как выполняются определение, коррекция и увеличение/снижение, как описано выше, на этапе S52, сигнал относительно целевой рекуперативной тормозной силы FRG* отправляется в HB-ECU 29, который представляет собой контроллер рекуперативного тормозного устройства 30, сигналы относительно каждой целевой электрической тормозной силы FEM* передаются в EM-ECU 232, который представляет собой контроллер каждого электрического тормозного устройства 34, и выполняется управление с обратной связью гидравлической тормозной силы FHY на основе целевой гидравлической тормозной силы FHY* для гидравлического тормозного устройства 32. В этой связи, когда целевая гидравлическая тормозная сила FHY* превышает 0 без выполнения управления повышением скорости отклика, насосы 60 гидравлического тормозного устройства 32 приводятся в действие посредством обработки по S52.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2686253C2 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИЛОЙ | 2019 |
|
RU2719536C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2019 |
|
RU2742459C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2540197C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2021 |
|
RU2765067C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩИМИСЯ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2015 |
|
RU2689075C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ТОРМОЗОМ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2724916C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2723661C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2020 |
|
RU2744524C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2729868C1 |
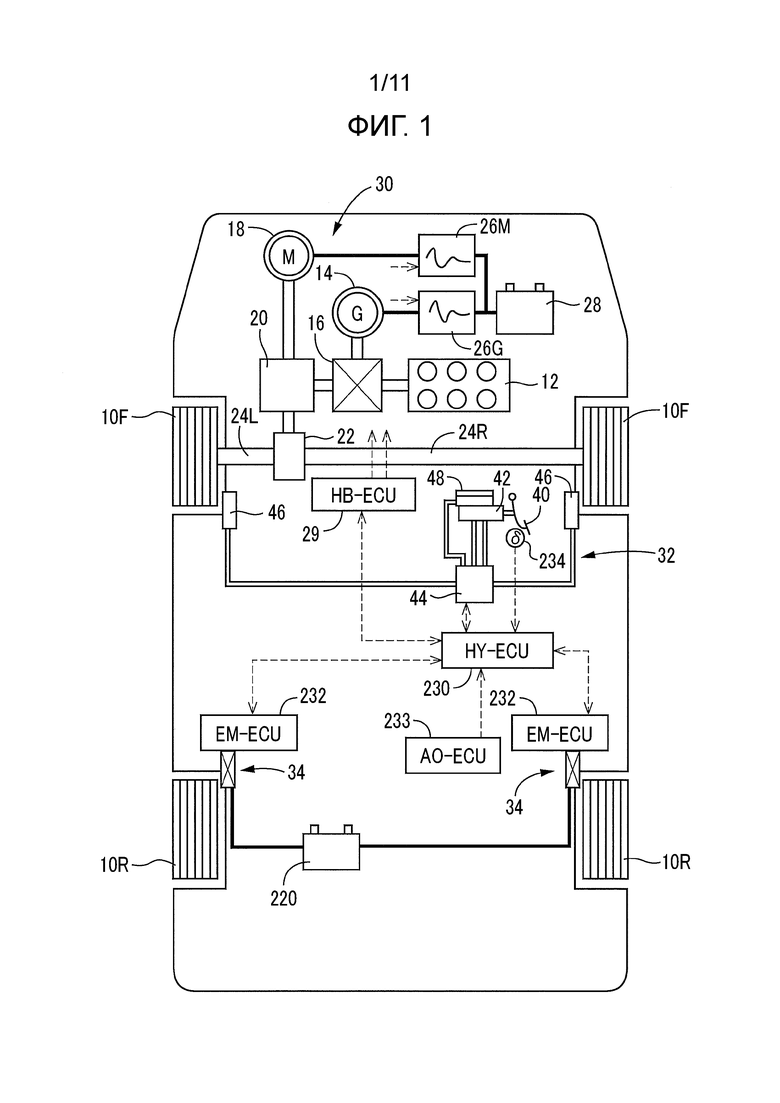
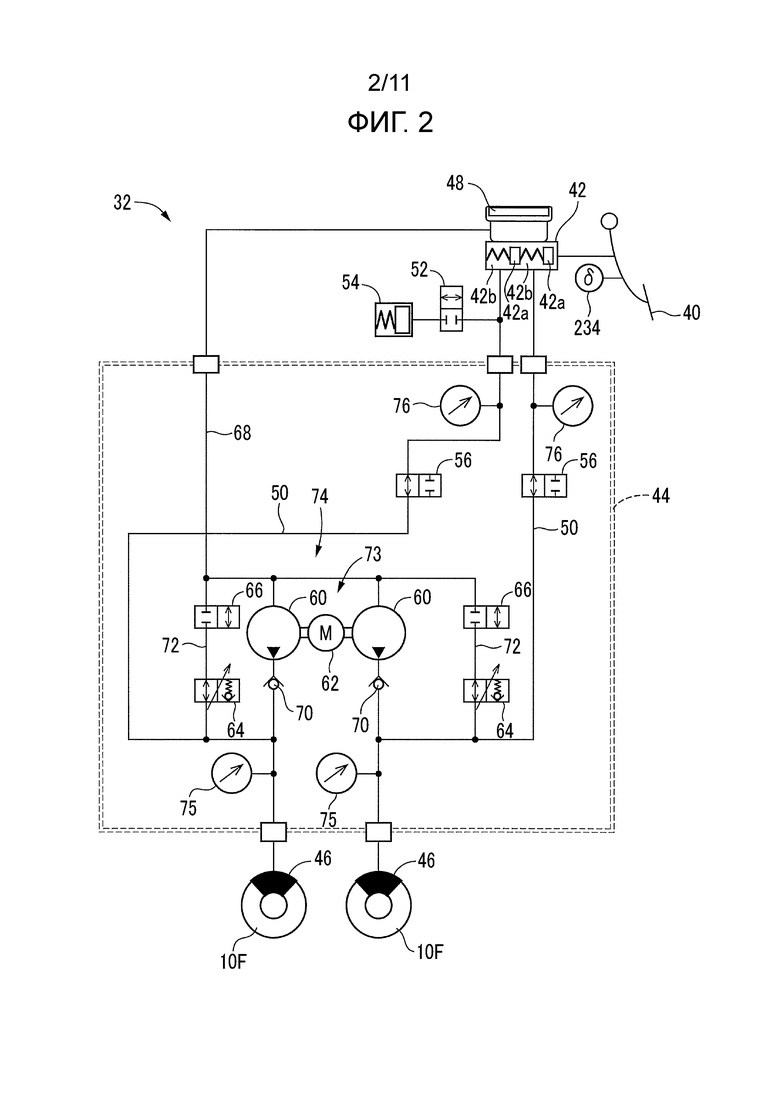
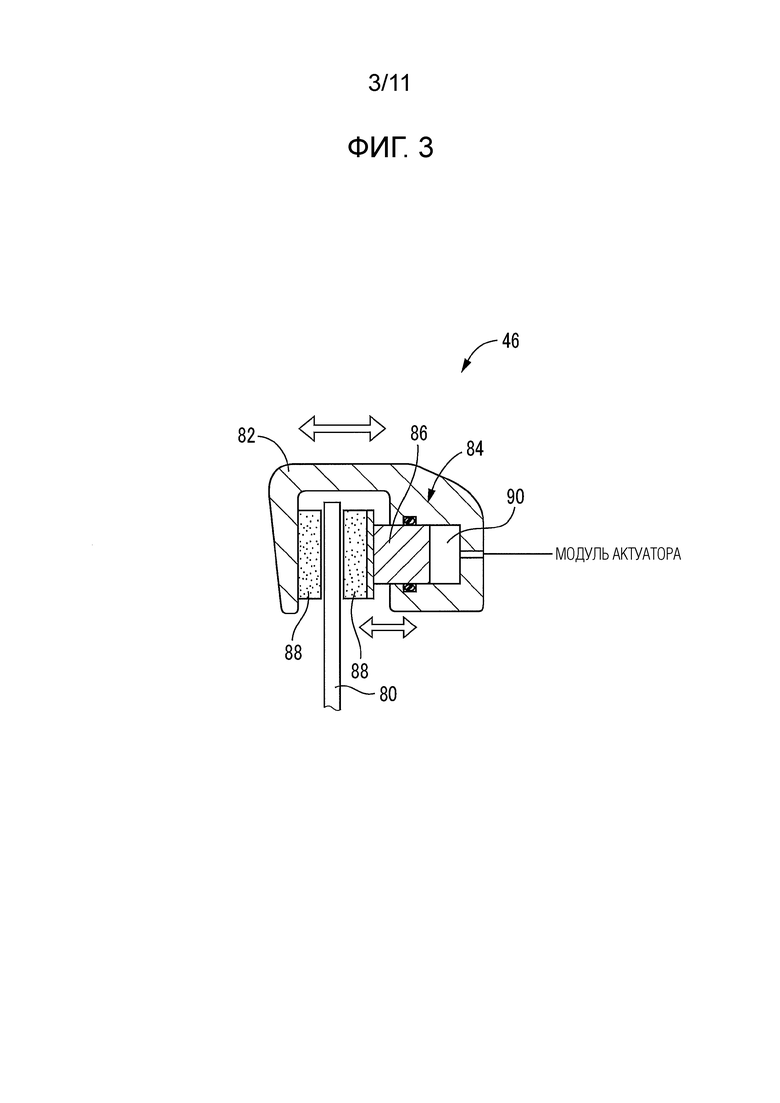
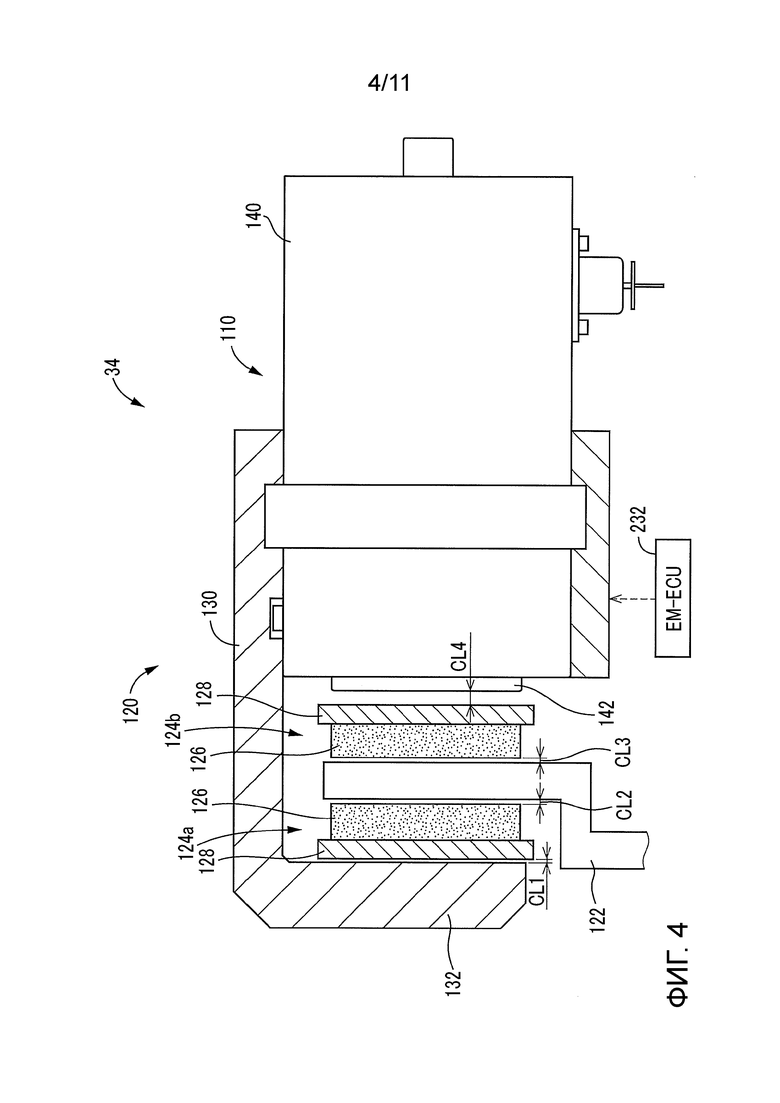
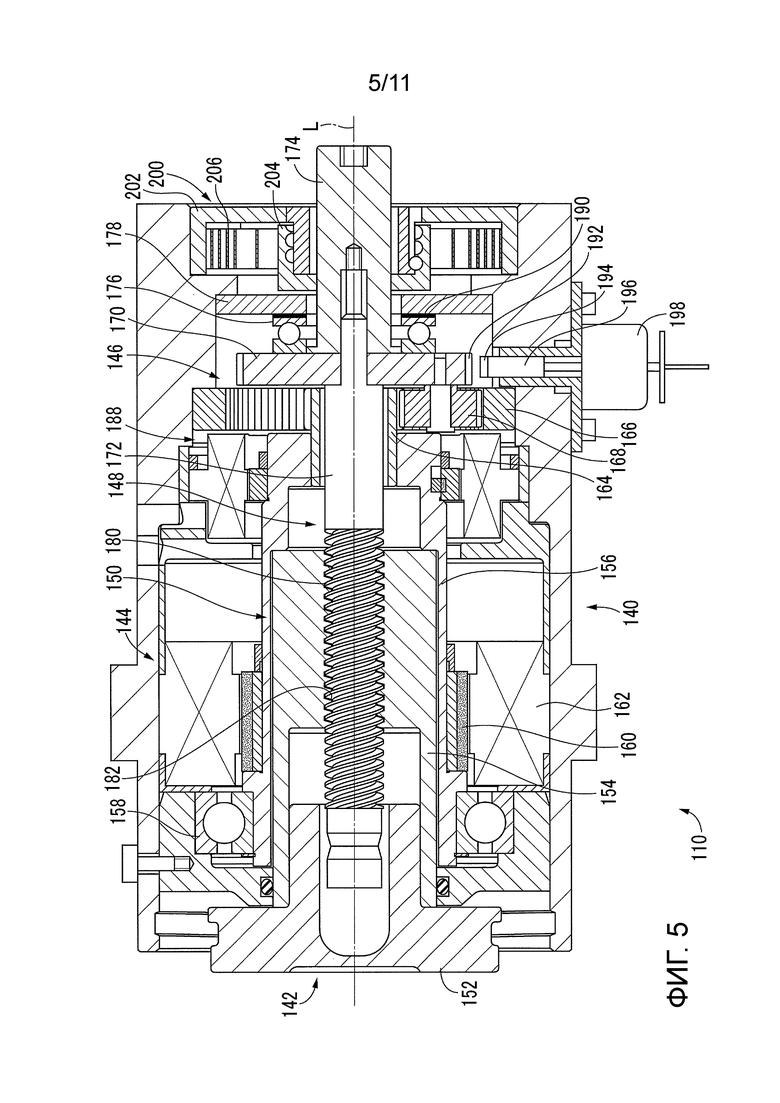
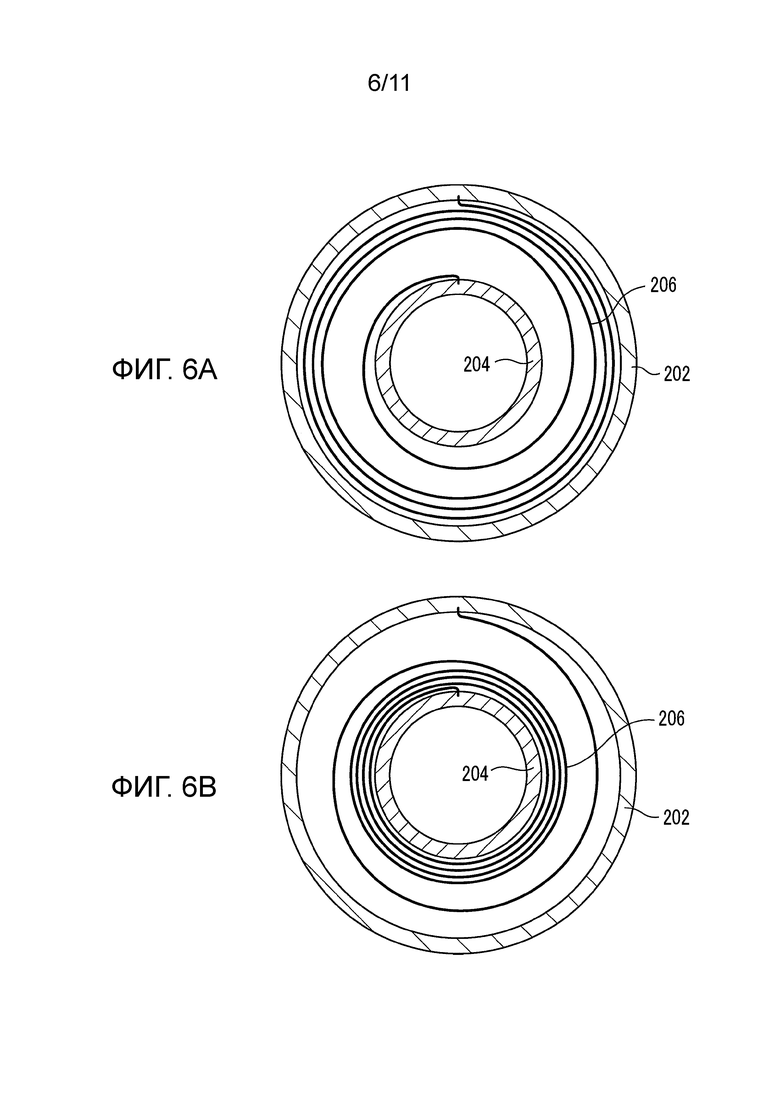
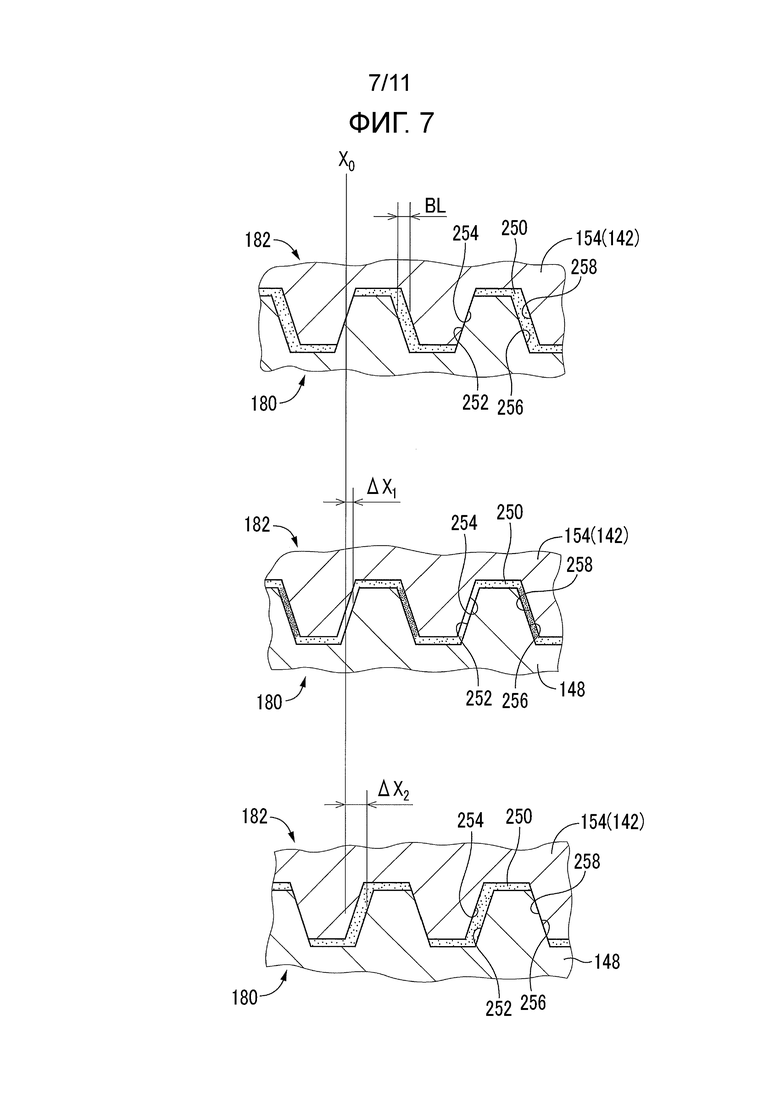
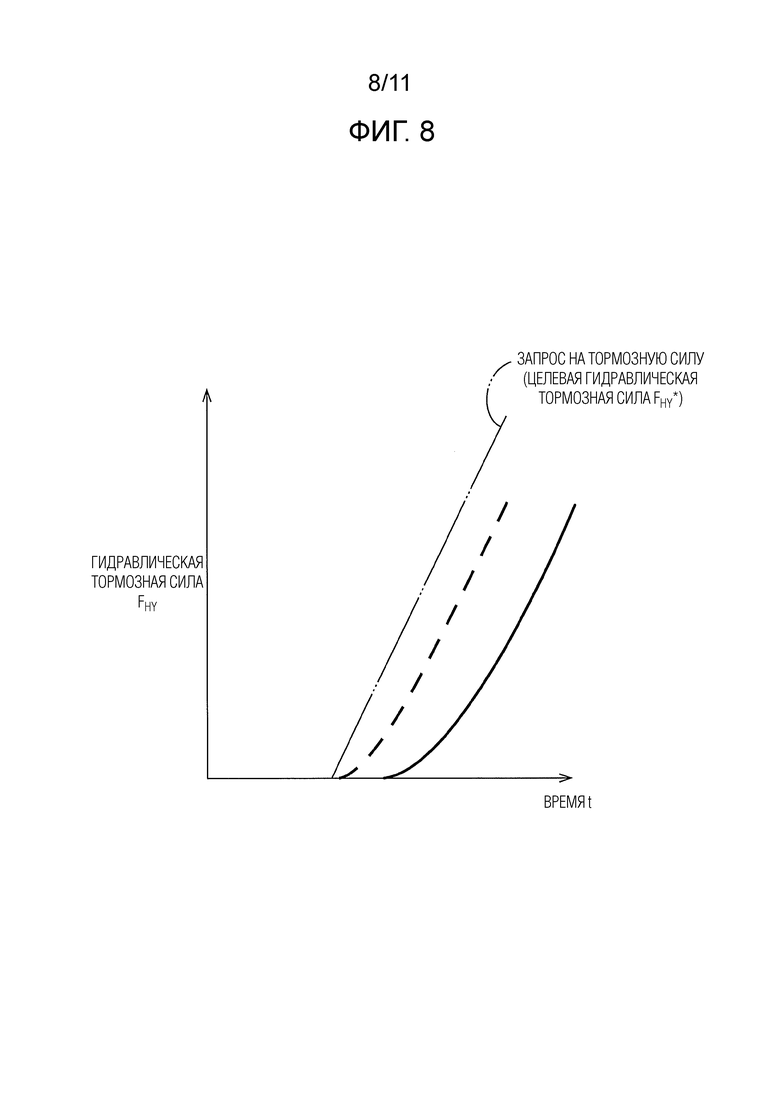
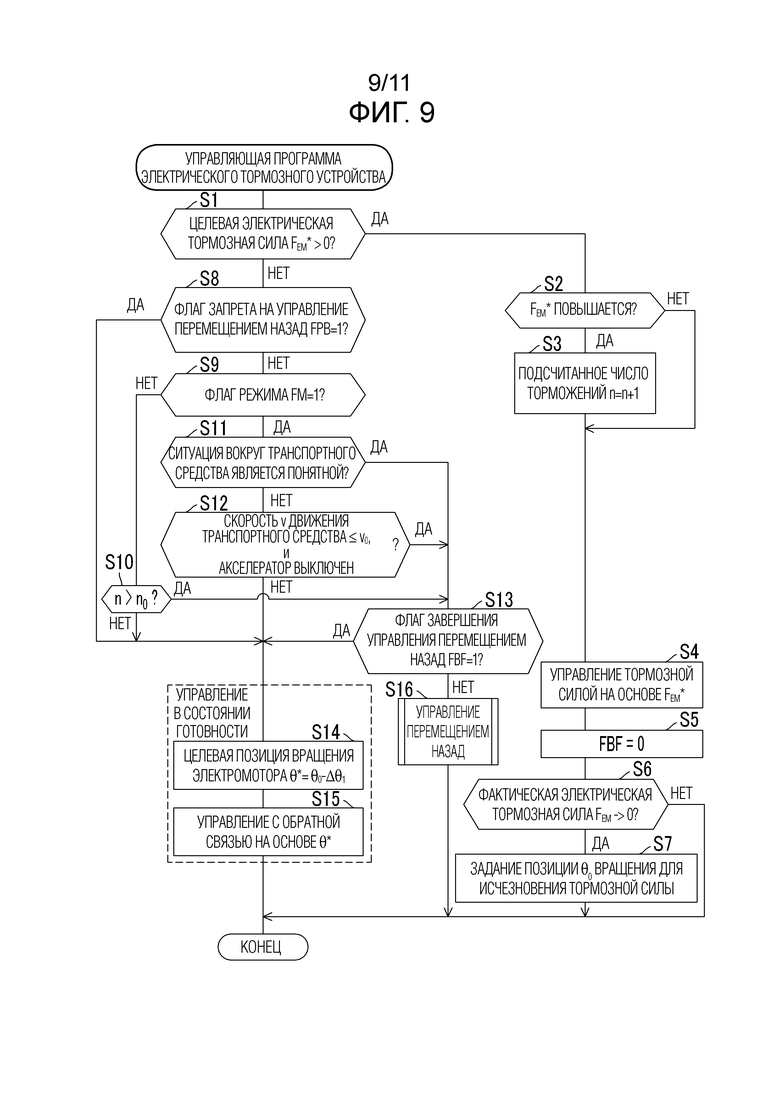
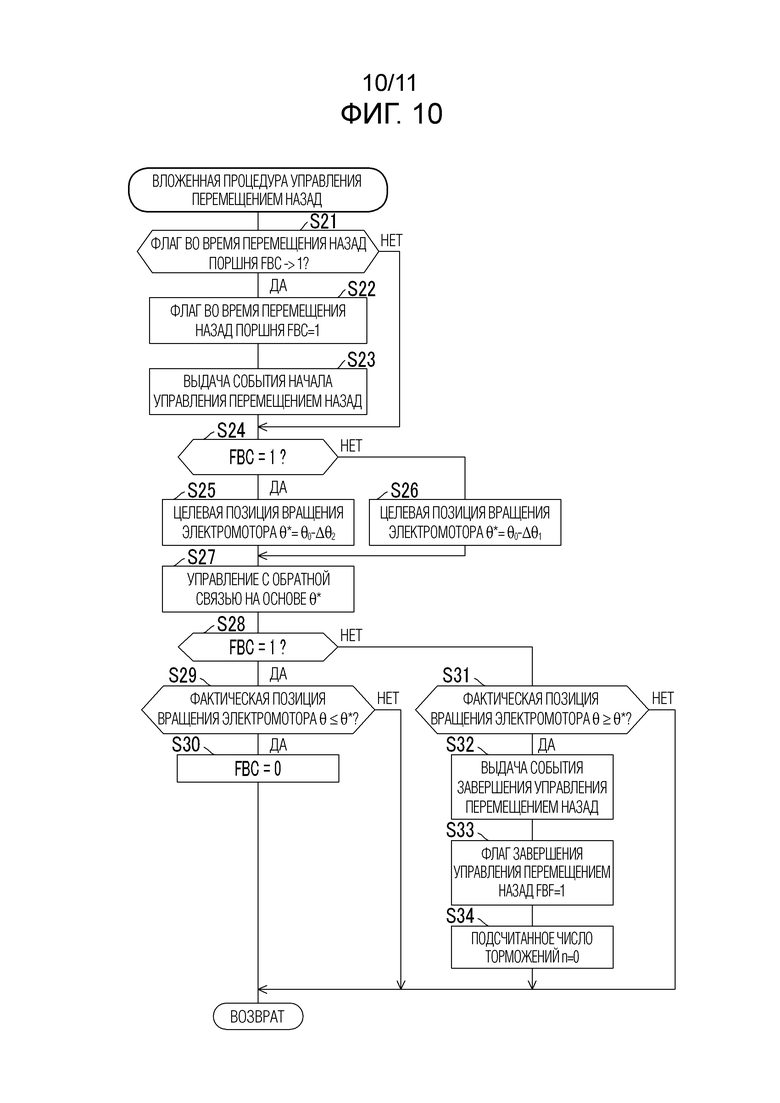
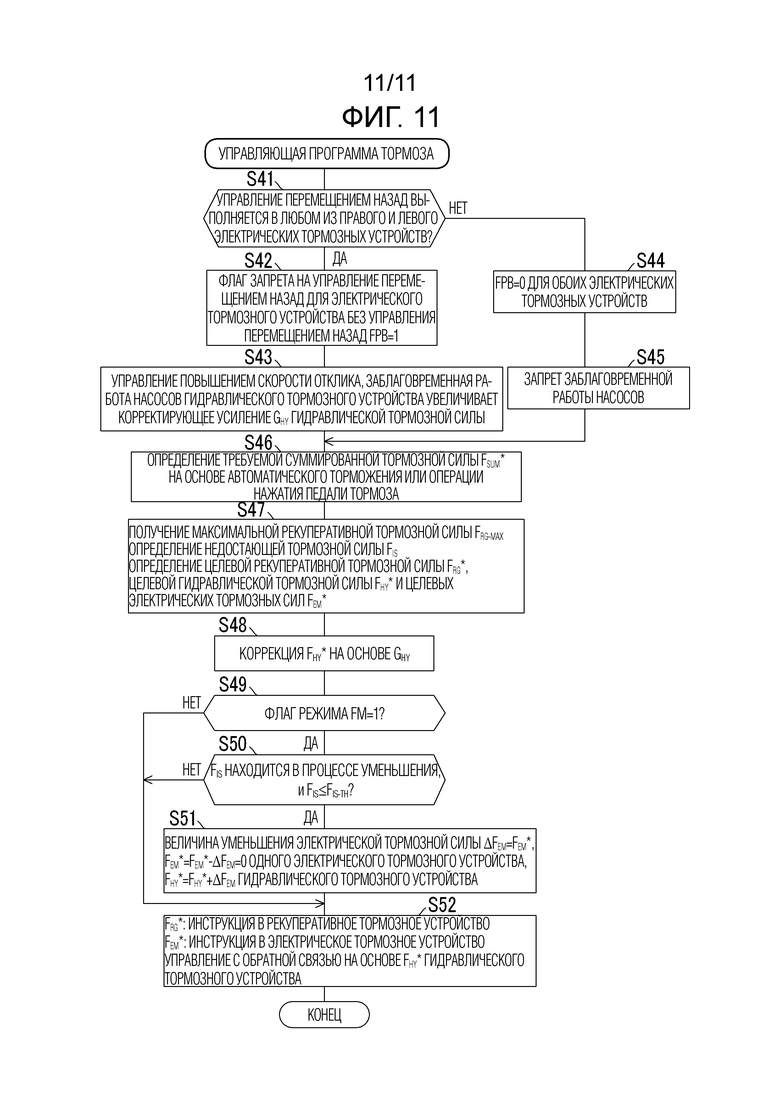
Электрическое тормозное устройство содержит вращающийся узел, который вращается вместе с колесом, фрикционный элемент, который формирует тормозную силу вследствие трения с вращающимся узлом посредством прижатия к вращающемуся узлу, электромотор, служащий в качестве приводного источника, поршень, рабочий механизм преобразования, выполненный с возможностью преобразования вращения электромотора в перемещение вперед и назад поршня, актуатор, выполненный с возможностью прижатия фрикционного элемента к вращающемуся узлу посредством перемещения вперед поршня, контроллер, выполненный с возможностью управления актуатором посредством управления вращением электромотора. Рабочий механизм преобразования включает в себя: вращающийся элемент, который имеет одно из винта с наружной резьбой и винта с внутренней резьбой, зацепленных с помощью резьбы друг с другом в состоянии, в котором смазочный материал размещается между ними, причем вращающийся элемент является вращающимся посредством вращения электромотора, и элемент с прямолинейным движением, который имеет другое из винта с наружной резьбой и винта с внутренней резьбой и выполнен с возможностью быть подвижным вперед и назад, чтобы перемещать поршень вперед и назад. Контроллер избирательно выполняет, когда отсутствует запрос на тормозную силу для электрического тормозного устройства, управление в состоянии готовности для инструктирования элементу с прямолинейным движением находиться в позиции готовности, в которой зазор между фрикционным элементом и вращающимся узлом не превышает люфт между винтом с наружной резьбой и винтом с внутренней резьбой, и управление перемещением назад для перемещения назад элемента с прямолинейным движением в позицию перемещения назад, в которой допускается зазор, равный или больший люфта. Предложены также тормозная система транспортного средства. Достигается повышение практичности. 2 н. и 15 з.п. ф-лы, 11 ил.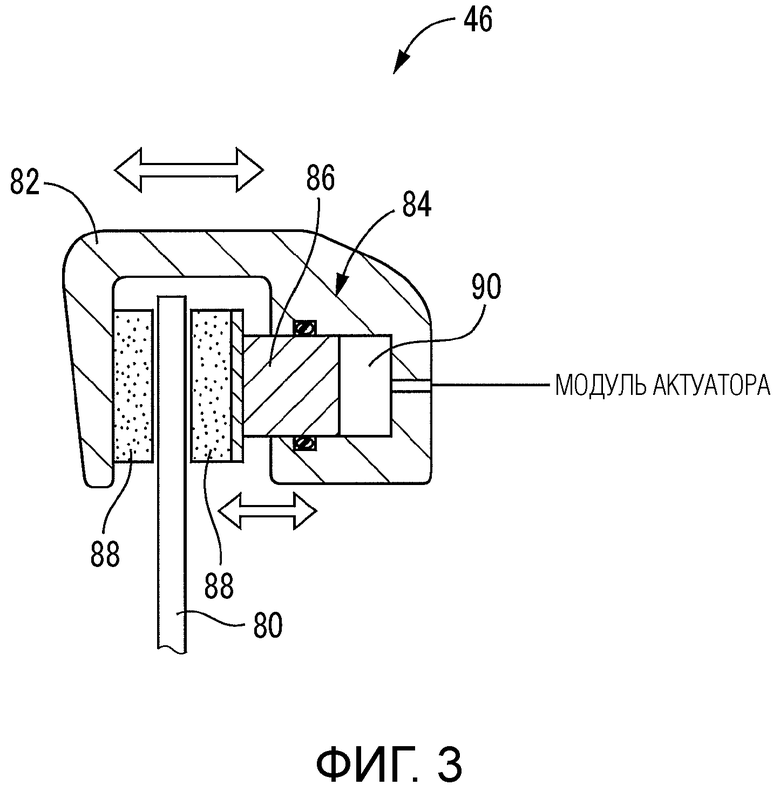
1. Электрическое тормозное устройство, монтируемое на транспортном средстве и содержащее:
вращающийся узел, который вращается вместе с колесом;
фрикционный элемент, который формирует тормозную силу вследствие трения с вращающимся узлом посредством прижатия к вращающемуся узлу;
электромотор, служащий в качестве приводного источника;
поршень;
рабочий механизм преобразования, выполненный с возможностью преобразования вращения электромотора в перемещение вперед и назад поршня;
актуатор, выполненный с возможностью прижатия фрикционного элемента к вращающемуся узлу посредством перемещения вперед поршня; и
контроллер, выполненный с возможностью управления актуатором посредством управления вращением электромотора,
при этом рабочий механизм преобразования включает в себя:
- вращающийся элемент, который имеет одно из винта с наружной резьбой и винта с внутренней резьбой, зацепленных с помощью резьбы друг с другом в состоянии, в котором смазочный материал размещается между ними, причем вращающийся элемент является вращающимся посредством вращения электромотора, и
- элемент с прямолинейным движением, который имеет другое из винта с наружной резьбой и винта с внутренней резьбой и выполнен с возможностью быть подвижным вперед и назад, чтобы перемещать поршень вперед и назад;
при этом контроллер избирательно выполняет, когда отсутствует запрос на тормозную силу для электрического тормозного устройства, управление в состоянии готовности для инструктирования элементу с прямолинейным движением находиться в позиции готовности, в которой зазор между фрикционным элементом и вращающимся узлом не превышает люфт между винтом с наружной резьбой и винтом с внутренней резьбой, и управление перемещением назад для перемещения назад элемента с прямолинейным движением в позицию перемещения назад, в которой допускается зазор, равный или больший люфта.
2. Электрическое тормозное устройство по п. 1, в котором контроллер выполнен с возможностью начала выполнения управления в состоянии готовности, чтобы разрешать перемещение назад элемента с прямолинейным движением, когда запрос на тормозную силу для электрического тормозного устройства отменен, когда предварительно установленное предварительное условие не удовлетворяется, и начала выполнения управления перемещением назад, когда запрос на тормозную силу отменен, когда удовлетворяется предварительно установленное предварительное условие.
3. Электрическое тормозное устройство по п. 2, в котором предварительно установленное предварительное условие задано на основе состояния активации электрического тормозного устройства.
4. Электрическое тормозное устройство по п. 3, в котором:
состояние активации электрического тормозного устройства индексируется в зависимости от числа раз, когда электрическое тормозное устройство формирует тормозную силу после того, как управление перемещением назад выполняется позже всего; и
контроллер выполнен с возможностью использования такого события, что число раз превышает предварительно установленное число, в качестве предварительно установленного предварительного условия, и начала выполнения управления перемещением назад, когда удовлетворяется предварительно установленное предварительное условие.
5. Электрическое тормозное устройство по любому из пп. 1-4, в котором контроллер выполнен с возможностью разрешения выполнения управления перемещением назад в ситуации низкой вероятности операции нажатия педали тормоза, в которой вероятность операции нажатия педали тормоза водителем является низкой.
6. Электрическое тормозное устройство по п. 5, в котором, в случае если транспортное средство оснащено системой мониторинга, которая отслеживает ситуацию вокруг транспортного средства, контроллер выполнен с возможностью разрешения выполнения управления перемещением назад на основе инструкции, показывающей то, что транспортное средство находится в ситуации низкой вероятности операции нажатия педали тормоза, причем инструкция должна приниматься из системы мониторинга.
7. Электрическое тормозное устройство по п. 5, в котором ситуация низкой вероятности операции нажатия педали тормоза определяется на основе, по меньшей мере, одного из рабочего состояния транспортного средства и состояния движения транспортного средства.
8. Электрическое тормозное устройство по п. 7, в котором:
состояние движения транспортного средства индексируется в зависимости от присутствия или отсутствия операции нажатия педали акселератора транспортного средства;
рабочее состояние транспортного средства индексируется в зависимости от скорости движения транспортного средства; и
контроллер выполнен с возможностью разрешения выполнения управления перемещением назад, когда скорость движения транспортного средства равна или меньше заданной скорости, и операция нажатия педали акселератора не выполняется.
9. Электрическое тормозное устройство по любому из пп. 1-4, в котором управление перемещением назад включает в себя управление для перемещения элемента с прямолинейным движением вперед вплоть до позиции готовности после того, как элемент с прямолинейным движением перемещается назад вплоть до позиции перемещения назад.
10. Электрическое тормозное устройство по любому из пп. 1-4, в котором контроллер выполнен с возможностью передачи сигнала, показывающего выполнение управления перемещением назад.
11. Тормозная система транспортного средства, содержащая:
электрическое тормозное устройство по любому из пп. 1-4; и
отдельное тормозное устройство, предоставленное на колесе, отдельном от колеса, содержащего электрическое тормозное устройство.
12. Тормозная система по п. 11, в которой отдельное тормозное устройство представляет собой гидравлическое тормозное устройство, включающее в себя:
колесный тормоз, который формирует тормозную силу посредством прижатия фрикционного элемента к вращающемуся узлу, который вращается вместе с колесом, на основе давления гидравлической жидкости, которая должна подаваться в отдельное тормозное устройство,
исходное устройство высокого давления, выполненное с возможностью подачи гидравлической жидкости высокого давления в колесный тормоз, когда исходное устройство высокого давления работает, и
устройство регулирования давления, выполненное с возможностью регулирования давления гидравлической жидкости, которая должна подаваться из исходного устройства высокого давления в колесный тормоз в соответствии с запросом на тормозную силу для отдельного тормозного устройства.
13. Тормозная система по п. 11, в которой тормозная система выполнена с возможностью осуществления управления повышением скорости отклика для дополнительного повышения скорости отклика отдельного тормозного устройства в ответ на запрос на тормозную силу для отдельного тормозного устройства, когда управление перемещением назад выполняется в электрическом тормозном устройстве.
14. Тормозная система по п. 13, в которой:
отдельное тормозное устройство представляет собой гидравлическое тормозное устройство, включающее в себя:
колесный тормоз, который формирует тормозную силу посредством прижатия фрикционного элемента к вращающемуся узлу, который вращается вместе с колесом, на основе давления гидравлической жидкости, которая должна подаваться в отдельное тормозное устройство,
исходное устройство высокого давления, выполненное с возможностью подачи гидравлической жидкости высокого давления в колесный тормоз, когда исходное устройство высокого давления работает, и
устройство регулирования давления, выполненное с возможностью регулирования давления гидравлической жидкости, которая должна подаваться из исходного устройства высокого давления в колесный тормоз в соответствии с запросом на тормозную силу для отдельного тормозного устройства, и
управление повышением скорости отклика представляет собой управление для выполнения, по меньшей мере, одного из продвижения вперед времени начала работы исходного устройства высокого давления и повышения давления гидравлической жидкости, отрегулированной посредством устройства регулирования давления.
15. Тормозная система по п. 13, в которой:
контроллер выполнен с возможностью передачи сигнала, показывающего выполнение управления перемещением назад, и
управление повышением скорости отклика выполнено с возможностью осуществления на основе сигнала.
16. Тормозная система по п. 11, в которой когда сумма тормозной силы, сформированной посредством электрического тормозного устройства, и тормозной силы, сформированной посредством отдельного тормозного устройства, снижается таким образом, что она равна или меньше заданного уровня, тормозная система выполнена с возможностью отмены запроса на тормозную силу для электрического тормозного устройства и увеличения тормозной силы, сформированной посредством отдельного тормозного устройства, на величину тормозной силы, которая должна формироваться посредством электрического тормозного устройства.
17. Тормозная система по п. 11, в которой:
отдельное тормозное устройство имеет конфигурацию, идентичную конфигурации электрического тормозного устройства; и
тормозная система выполнена с возможностью, когда одно из электрических тормозных устройств выполняет управление перемещением назад, запрещения выполнения управления перемещением назад посредством другого электрического тормозного устройства.
| EP 1085240 A1, 21.03.2001 | |||
| WO 2014115872 A1, 31.07.2014 | |||
| JP 2014141214 A, 07.08.2014. |

