Изобретение относится к способу и устройству для автоматического управления тормозной системой транспортного средства.
Для удержания транспортного средства на подъеме, например, при движении скопившейся колонны обычно автомобиль удерживают в состоянии останова за счет того, что за счет согласованного друг с другом воздействия на педаль акселератора и на сцепление на колеса автомобиля передается как раз такой величины крутящий момент от двигателя, что автомобиль прекращает движение. У автомобилей, оснащенных автоматизированным сцеплением или автоматической коробкой передач, отпадает манипуляция воздействием на педаль сцепления, а автомобиль останавливается за счет слабого нажатия на педаль акселератора, соответственно на педаль управления подачей топлива, причем при наличии гидротрансформатора используется его понижающая функция.
Описанный останов автомобиля на подъеме требует от водителя не только в значительной степени внимательности, но также напрягает сцепление и приводит к повышенному расходу топлива в состоянии останова.
В основу изобретения положена задача создания такого способа и устройства, которые позволили бы устранить описанную проблему.
Пункт 1 формулы изобретения направлен на способ для решения поставленной задачи изобретения.
Согласно изобретению предусмотрена тормозная система транспортного средства, которая может быть приведена в действие от постороннего усилия независимо от воздействия на педаль тормоза, например, электродвигателем, гидравлическим или пневматическим устройствами. Сцепление, содержащееся в ветви трансмиссии транспортного средства, приводят в действие таким образом, что оно не полностью прерывает передачу крутящего момента между приводным двигателем и, по меньшей мере, одним колесом транспортного средства, так что автомобиль в зависимости от создаваемого двигателем крутящего момента и управления сцеплением может удерживаться на подъеме в состоянии покоя. Если устанавливают, что при неполном прекращении передачи крутящего момента между приводным двигателем и колесом транспортного средства скорость движения автомобиля равна нулю (0) при заложенной позиции движения вперед или даже автомобиль откатывается назад и/или при закладываемой позиции движения назад скорость тоже нуль (0) или автомобиль катится вперед, это с достаточной степенью достоверности означает то, что автомобиль находится на участке подъема или на склоне, и водитель желает остановить автомобиль. При наличии этих условий тормозная система автомобиля управляется посторонним усилием, так что автомобиль удерживается непосредственно своей тормозной системой, и водитель разгружен.
Способ согласно изобретению пригоден как для автомобилей, оснащенных манипулированным управлением сцеплением, так и согласно пункту 2 формулы изобретения для автомобилей с автоматизированным сцеплением.
Зависимые пункты 3-5 формулы изобретения направлены на предпочтительные формы осуществления и усовершенствования способа согласно изобретению.
Согласно признакам пункта 3 уменьшается износ элементов сцепления, так же как и использование автомобиля в состоянии останова.
Признаками пункта 4 достигается то, что подшипник (муфты) выключения сцепления эксплуатируется в щадящем режиме.
Признаками пункта 5 особым образом снижается нагрузка на окружающую среду.
Пункт 6 формулы изобретения характеризует основную конструкцию устройства для решения задачи согласно изобретению.
Усовершенствованные варианты устройства согласно пункту 6 характеризуются предпочтительно признаками пунктов 7-11 формулы изобретения.
Ниже изобретение более подробно поясняется на основе примеров выполнения со ссылкой на чертежи, на которых схематически показано:
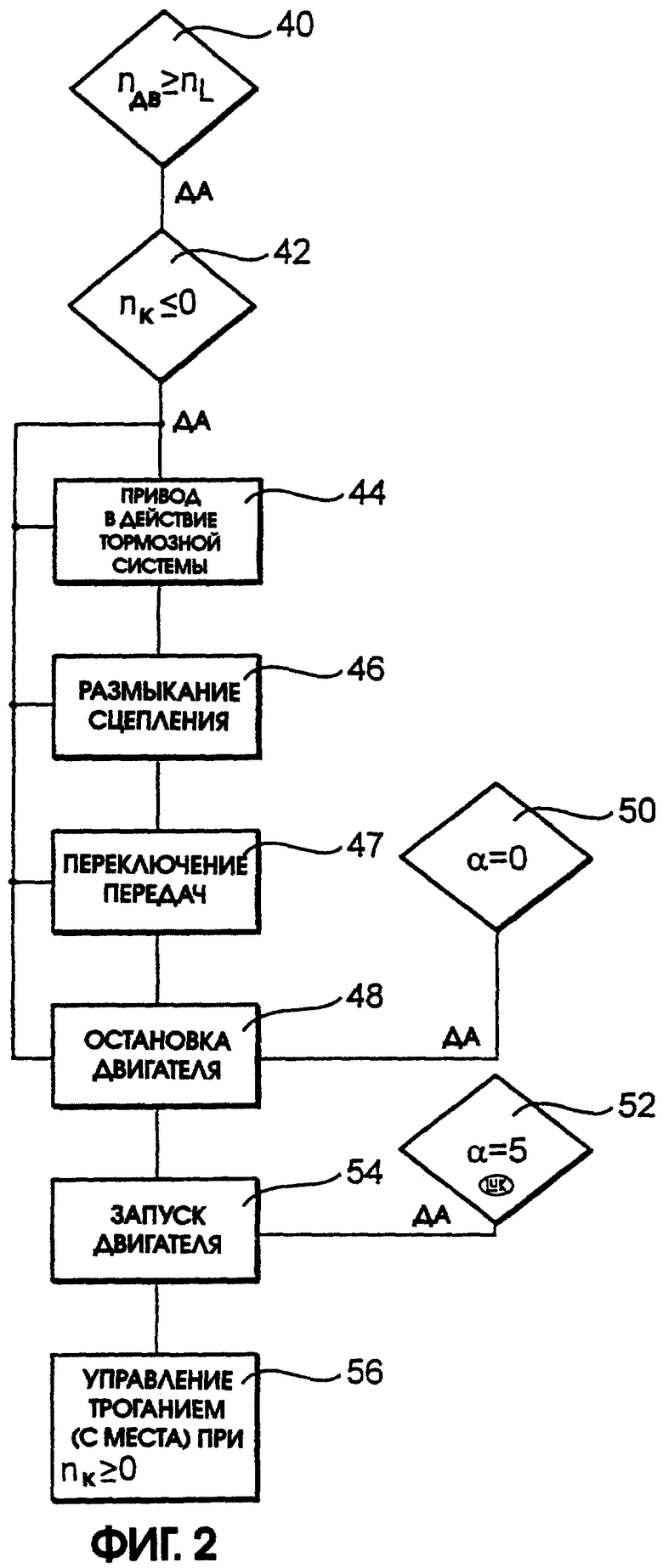
фиг 1 - функциональная блок-схема устройства согласно изобретению;
фиг.2 - временная диаграмма для пояснения принципа действия (процесса) устройства согласно изобретению.
Согласно фиг.1 ветвь трансмиссии не показанного на чертеже транспортного средства содержит приводной двигатель 2, который через сцепление 4 соединен с передачей 6, от которой ведомый вал 8 через не показанный на чертеже дифференциал ведет к ведущим колесам.
Нагрузка на приводной двигатель 2 регулируется приводимым от двигателя исполнительным органом 10 регулирования мощности. В случае ДВС (двигателя внутреннего сгорания) с принудительным воспламенением рабочей смеси исполнительным органом 10 регулирования мощности может быть, например, дроссельный клапан; в случае дизельного двигателя этим органом может быть рейка ТНВД (топливного насоса высокого давления).
Сцепление 4 представляет собой, например, известную дисковую, фрикционную муфту, для управления которой предусмотрено устройство 12 управления сцеплением.
Передача 6 может быть нормальной коробкой переключения передач, бесступенчатой регулируемой передачей (CVT) или автоматической коробкой передач, работающей с планетарным рядом. Отдельные ступени или диапазоны изменения передаточного отношения включаются устройством 14 управления передачей.
Тормоза 16 колес транспортного средства управляется посредством устройства 18 управления тормозами электрически, гидравлически или пневматически.
Для управления названными устройствами и исполнительными звеньями 10, 12, 14 и 18 служит управляющий модуль 20, который содержит, например, микропроцессор с принадлежащими ему запоминающими устройствами (ЗУ) и к которому подаются в качестве входных (сигналов) сигналы от следующих датчиков: датчика 22 частоты вращения для определения числа nдв оборотов двигателя, датчика 24 частоты вращения для определения скорости или числа nк оборотов колес, датчика 26 давления для определения приводного усилия педали 28 тормоза, датчика 30 положения для определения положения α педали 32 акселератора, а также датчика 34 выбора для определения положения рычага управления коробкой передачи устройства 36 управления по выбору, предназначенного для управления передачей 6.
Конструкция и функция названных конструктивных элементов и конструктивных модулей сами по себе известны и поэтому подробно не поясняются. Тормозная система может быть выполнена, например, таким образом, что нет никакой прямой связи между педалью 28 тормоза и тормозами 16 колес и что управляющий модуль 20 управляет исполнительным звеном 18 тормоза в соответствии с усилием воздействия на педаль 28 тормоза, а также при необходимости в соответствии с другими параметрами, как буксующее колесо, нестабильность движения и т.д. Тормозная система может быть также сконструирована и таким образом, что существует прямое, например, гидравлическое соединение между педалью 28 тормоза и тормозами 16 колес, причем сила торможения может быть увеличена усилителем привода, как, например, у ABS-систем (противоблокировочное устройство тормозной системы - ABS), с возможностью влиять индивидуально. В каждом случае тормозная система содержит независимый источник энергии, посредством которого исполнительное звено 18 тормоза может управлять, по меньшей мере, одним, предпочтительно всеми тормозами 16 колес.
Принцип действия во взаимодействии названных модулей согласно изобретению показан на примере фиг.2, при этом принимается во внимание то, что устройство 12 управления сцеплением так управляет сцеплением 4, что в режиме нормальной эксплуатации автомобиля через сцепление 4 постоянно происходит определенная передача крутящего момента от приводного двигателя 2 к ведомому валу 8, так что при заложенном режиме работы ветвь трансмиссии располагает функцией понижения, которая следит за тем, чтобы транспортное средство на ровном дорожном полотне при работающем двигателе постоянно развивало определенное тяговое усилие в направлении заложенного режима работы, если двигатель работает с превышением частоты вращения на холостом ходу.
На ступени 40 определяют, имеет ли двигатель частоту nм вращения, по меньшей мере, такой же величины, что и частота nхх вращения на холостом ходе. Если это как раз тот случай, то на ступени 42 определяют, равна ли нулю (0) или имеет даже отрицательное значение частота nк вращения колеса, при этом в изображенном примере выполнения делается предпосылка, что рычаг управления коробкой передач блока 36 управления по выбору находится в положении, соответствующем движению вперед. Если это как раз тот случай, то на ступени 44 регулирования управляющим модулем 20 активизируют устройство 18 управления торможения, так что колесный тормоз 16 прикладывает усилие, достаточное для удерживания транспортного средства. О срабатывании тормоза на этой ступени 44 водителю сигнализирует преимущественно не показанная на чертеже сигнальная лампочка на приборной панели.
Водитель не должен далее нажимать тогда на педаль 32 акселератора для удержания транспортного средства.
На ступени 46 регулирования сцепление 4 полностью разомкнуто, так что двигатель из-за возросшего сопротивления не должен работать вхолостую, и фрикционные диски муфты сцепления не подвергаются дальше износу. На ступени 47 для предохранения подшипника выключения сцепления передача переключается в нейтральное положение, так что сцепление может быть включено.
На ступени 48 управляющий модуль 20 останавливает двигатель, в случае, если на ступени 50 было установлено, что водитель не воздействует на педаль акселератора.
Если на ступени 52 устанавливается, что водитель вновь воздействует на педаль акселератора, то на ступени 54 двигатель запускается, после чего протекает обычный процесс разгона, согласно ступени 56, который происходит таким образом, что колеса транспортного средства назад не вращаются, так что на подъеме исключается скатывание автомобиля назад.
Следует принять во внимание, что описанные выше способ и устройство согласно фиг.1 могут быть многократно модифицированы: так, например, способ в этом отношении может быть модифицирован так, что, если транспортное средство стоит дольше положенного (определенного) времени с работающим с частотой вращения холостого хода двигателем, то колесные тормоза 16 автоматически активизируются устройством 18 управления тормозами, причем это может происходить независимо от того или вкупе с ним, нажата ли педаль 28 тормоза. На ступени 48 автоматическая функция останова двигателя может быть связана с определенным временным интервалом или с дополнительно активизируемой функцией выбора.
Если сцепление 4 выполнено только как гидродинамический трансформатор и при этом уже нет устройства 12 управления сцеплением, то ступень 46 регулирования отпадает.
Прилагаемые к данной заявке пункты формулы изобретения представляют собой предложения по формулировке без ущерба для получения идущей дальше (достаточно широкой) патентной защиты. За заявителем остается право претендовать еще и на другие, раскрытые до сих пор только в описании и/или чертежах комбинации признаков.
Примененные в зависимых пунктах формулы изобретения обратные ссылки (взаимосвязи) указывают на другие варианты выполнения предмета изобретения согласно основному пункту формулы за счет признаков соответствующих зависимых пунктов формулы изобретения, их не нужно понимать как отказ от достижения самостоятельной, материальной защиты для комбинации признаков из взаимосвязанных дополнительных пунктов формулы изобретения. Так как предметы изобретения зависимых пунктов формулы изобретения, принимая во внимание известный уровень техники на дату приоритета, могут быть предметом собственного и независимого изобретения, то заявитель оставляет за собой право сделать их предметом независимых пунктов формулы изобретения или сделать заявления о разделении заявки. Кроме того, они могут также содержать самостоятельные изобретения, которые имеют конструктивное выполнение, независимое от предметов предыдущих, зависимых пунктов формулы изобретения.
Примеры выполнения изобретения не следует понимать как ограничение изобретения. Более того, в рамках предлагаемого раскрытия изобретения возможны многочисленные модификации и усовершенствования, в частности такие варианты, элементы и комбинации и/или материалы, которые для специалиста, принимая во внимание решение задачи изобретения, могут быть заимствованы, например, из комбинации или модификации отдельных признаков, соответственно элементов или стадий способа, описанных в определенной связи в общем описании, формах выполнения, а также в формуле изобретения и содержащихся в чертежах, и которые за счет возможности комбинирования признаков приводят к новому предмету изобретения или новым стадиям способа или последовательности стадий способа, которые также относятся к способам изготовления, контроля и работы (обработки).
Изобретение относится к области машиностроения, в частности к устройствам для автоматического управления тормозными системами транспортных средств. В способе для автоматического управления тормозной системой транспортного средства приводимое в действие от постороннего усилия сцепление срабатывает таким образом, что оно не полностью прерывает передачу крутящего момента между приводным двигателем и, по меньшей мере, одним колесом транспортного средства. Устанавливается, равна ли нулю скорость транспортного средства при работающем приводном двигателе и заложенном режиме работы передачи вперед, или транспортное средство скатывается назад. При скатывании тормозная система транспортного средства приводится в действие от постороннего усилия без затраты энергии водителем на создание тормозного усилия, и передача крутящего момента между приводным двигателем и колесом транспортного средства полностью прерывается. Техническим результатом является упрощение управлением транспортного средства, а также уменьшение расхода топлива. 2 н. и 9 з.п. ф-лы, 2 ил.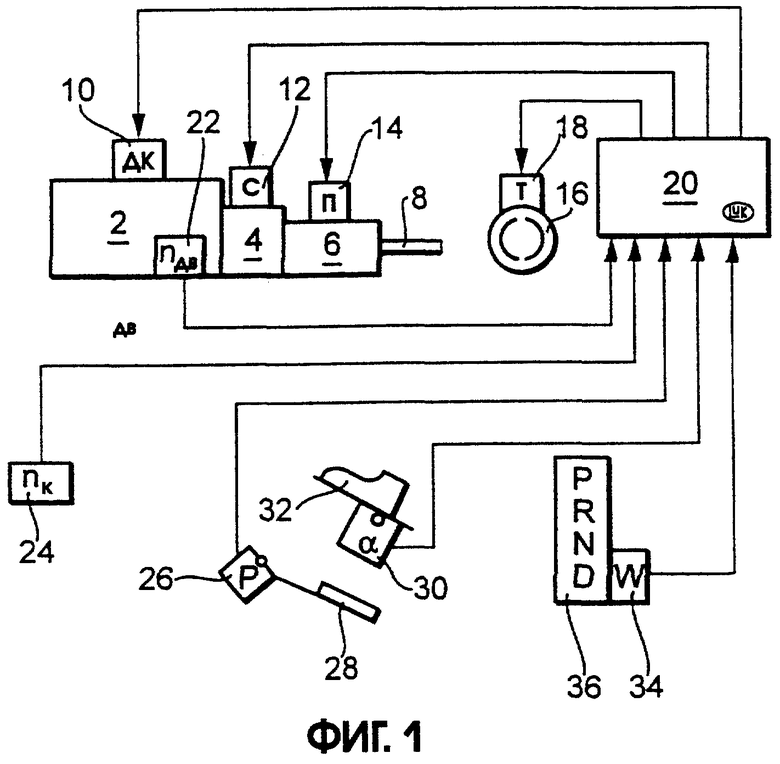
| DE 19856137 A1, 10.06.1999 | |||
| DE 19742815 A1, 16.04.1998 | |||
| Пресс-форма для штамповки жидкогоМЕТАллА | 1979 |
|
SU839684A1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2116910C1 |
| Устройство управления тормозной системой транспортного средства | 1976 |
|
SU735466A1 |

