Изобретения относятся к области управления движением космических аппаратов (КА) с помощью реактивных исполнительных органов: силовых гироскопов (СГ) и реактивных двигателей ориентации (ДО). Они могут быть использованы для одновременного управления движением как центра масс КА, так и вокруг его центра масс.
Известен способ совмещенного управления режимами ориентации и коррекции КА с использованием ДО [1]. Суть способа заключается в том, что при выполнении различных режимов ориентации ДО включается одновременно как для создания управляющих моментов, так и для перемещения центра масс. При этом на момент времени включения двигателя фиксируется положение КА, при котором его вектор тяги совпадает с вектором заданной скорости коррекции (например, с вектором скорости движения КА по орбите).
Примером выполнения такого управления может служить совмещение режимов закрутки КА на Солнце и коррекции орбиты. Для этого осуществляют совмещение строительной оси КА с направлением на Солнце и создают вокруг этой оси управляющий момент для достижения требуемой скорости закрутки. При этом измеряют угол между направлением на Солнце и вектором скорости движения КА по орбите. Фиксируют момент равенства измеряемого угла прямому, совмещают вектор скорости с вектором тяги ДО и производят закрутку и коррекцию одновременно.
Аналогично при реализации элементов управления другими режимами ориентации можно проводить коррекцию орбиты, всякий раз совмещая при создании управляющего момента вектор скорости с вектором тяги ДО.
При реализации предлагаемого способа может быть использована схема управления для выполнения режима ручной ориентации [2, с. 85-89] с использованием оптических визиров [2. с. 69-76].
Совмещение строительной оси КА с направлением на Солнце осуществляет экипаж, выполняющий режим ручной ориентации. Для этого используется оптический визир или иллюминатор, снабженный солнцезащитными фильтрами. Измерение угла между направлением на солнце и вектором скорости КА, а также фиксация момента отклонения измеряемого угла от прямого на величину, не превышающую заданную, возможны путем наблюдения через визир бега местности на поверхности Земли. Причем, если использовать визиры, имеющие поле зрения ≈ 190o, то можно совместить эти операции с наведением на Солнце. Заданная величина отклонения принимается равной достижимой точности построения ориентации для выбранного визира.
Создание угловой скорости производится путем задания ручкой управления требуемого управляющего воздействия на ДО. При этом совмещение вектора тяги с вектором скорости также выполняется экипажем, который по указанным внешним ориентирам выбирает момент времени для выдачи указанного воздействия.
Основные недостатки способа-аналога и системы-аналога заключены в следующем:
- в большинстве случаев управления КА вокруг центра масс невозможно совместить вектор тяги ДО с требуемым направлением коррекцией орбиты; этого не позволяют сделать расположение внешнего ориентира и временной фактор, требующий построения заданной ориентации на фиксированном интервале времени;
- усложнение процесса выполнения основного режима построения ориентации, которое может быть несопоставимым с полученным выигрышем, например, в экономии рабочего тела ДО; так для совмещения вектора тяги с требуемым направлением коррекции орбиты могут понадобиться понадобиться дополнительные угловые повороты КА; это приводит к расходу топлива и дополнительному нерасчетному возмущению орбиты от работающих ДО;
- управляющие импульсы для коррекции орбиты необходимо выдавать, строго говоря, также в расчетное время, что практически невозможно при передаче приоритета в управлении основному режиму построения ориентации, поэтому в принципе допускаются небольшие корректирующие импульсы в заданном направлении без временной привязки; затем окончательное формирование орбиты осуществляется расчетным импульсом при определенных ориентации, его величине и времени выдачи.
Из-за указанных недостатков большее распространение получил совмещенный режим ориентации и коррекции КА на ДО с переходом приоритета к режиму коррекции.
В таких случаях режим поддержания заданной ориентации, или угловой стабилизации, играет вспомогательную роль для режима коррекции.
Пример такого управления, описанный в патенте US [3], выбран в качестве прототипа для предлагаемых способа и системы.
В [3] описаны способ и система управления ориентацией и скоростью коррекции КА с применением импульсно регулируемых ДО. Предлагается также распространить предложенные принципы управления и на СГ.
В описании прототипа отмечается нижеследующая направленность технического решения на получение положительного результата.
Каждый КА до запуска имеет незначительные отклонения в своей конфигурации по сравнению с другими, и установка его ДО также имеет незначительные отклонения от номинальных размеров плеч для создания управляющих моментов. Кроме того, каждый ДО имеет особые импульсные характеристики, отличающиеся одна от другой. В результате этого логика системы управления движением персонифицируется для каждого КА.
На этапе проектирования КА может возникнуть необходимость изменения его конфигурации или характеристик ДО, которое может потребовать дорогостоящего изменения программного обеспечения.
Система управления обеспечивает управляющие моменты за счет определенной комбинации установленных ДО. Эти выбранные ДО обычно располагаются на противоположных сторонах от центра масс. Во время орбитального полета ДО КА могут отказывать или иметь особые импульсные характеристики. В случае отказа ДО не все комбинации моментов могут быть получены. Это может оказать неблагоприятное воздействие на динамику процесса или уменьшить возможности управления КА.
Система управления ориентацией и скоростью коррекции КА, реализующая описанный в прототипе способ, проектируется так, чтобы изменения в импульсной характеристике ДО, а также отклонения в размерах плеч учитывались при его использовании в управлении КА. Кроме того, учитываются и возможные отказы ДО. Проведем краткое описание содержания способа в соответствии с [3, с. 1-3].
Способ управления ориентацией и скоростью коррекции КА включает в себя определение требуемого значения скорости коррекции, измерение параметров для поддержания ориентации, содержащих угловую скорость. При этом для выработки сигналов управления, направленных на поддержание ориентации, используются измеренные параметры, включающие информацию с датчиков внешней ориентации (в частности звездных датчиков) и датчиков угловой скорости КА.
Далее производится определение управляющих сил и моментов для коррекции орбиты с помощью реактивных ДО при одновременном поддержании заданной ориентации. Полученные командные сигналы, представляющие вектора сил  и моментов
и моментов  , включают в себя взаимно ортогональные компоненты F1, F2 и F3 и T1, T2 и T3. Когда проводится одноимпульсная коррекция, некоторые или большинство этих компонент могут принимать нулевые значения. При этом вырабатывается 6 дифференциальных уравнений Δ в виде
, включают в себя взаимно ортогональные компоненты F1, F2 и F3 и T1, T2 и T3. Когда проводится одноимпульсная коррекция, некоторые или большинство этих компонент могут принимать нулевые значения. При этом вырабатывается 6 дифференциальных уравнений Δ в виде
где
a и b максимальные момент и сила, которые j-й ДО может выработать;
α - регулируемый параметр j-го ДО, который может принимать значения, лежащие в диапазоне от 0 до 1;
N - число ДО, установленных на КА.
Дифференциальные сигналы Δ суммируются, чтобы образовать одно скалярное уравнение, связывающее переменные α со скалярным характеристическим индексом Z. Это одно скалярное уравнение решается методом линейного программирования относительно значений αj, , которые максимизируют Z, а ДО управляется по полученным значениям αj. .
В [3, с. 4-5] отмечается, что при максимизации функционала Z будет максимизироваться величина характеристической скорости коррекции ΔV и одновременно будут минимизироваться ошибки между требуемыми моментами управления и реальными. Уравнения для целевого функционала Z решаются в каждом цикле управления. А регулируемый параметр αj всегда остается в диапазоне от 0 до 1. Регулируемые значения αj используются для формирования ширины импульса каждого ДО так, чтобы ширина импульса равнялась τ•αj, , где τ - период управления. Таким образом производится формирование управляющих сил и моментов при помощи реактивных ДО.
В процессе коррекции орбиты проводится также измерение скорости коррекции. Указанные измерения необходимы для контроля отработки заданного импульса скорости.
Основные недостатки способа-прототипа.
Представленный способ в полной мере подходит для управления только реактивными ДО. При управлении с помощью СГ не всегда можно обеспечить для получения управляющих моментов требуемый диапазон параметров αj от 0 до 1. По мере выхода на границу области располагаемых значений вектора кинетического момента S ограничивается возможность выдачи при помощи СГ управляющего момента заданной величины и направления вплоть до сведения такой возможности к нулю.
Об указанных ограничениях способа упоминается в его описании. Где в частности подчеркивается, что такой подход может быть использован для других исполнительных органов, таких как магнитные моментные двигатели и силовые гиростабилизаторы. Но это изобретение может быть использовано исключительно как часть незапоминающей моментной системы, в которой эти моментные устройства используются для управления.
Однако система СГ как раз и является запоминающей моментной системой. Она интегрирует действующие на КА возмущающие моменты и требует периодической разгрузки после своего насыщения.
Поэтому, в лучшем случае, можно говорить об ограниченных возможностях применения представленного способа в управлении СГ и ДО. Такие возможности появляются, например, после полной разгрузки СГ и до момента времени, до которого удается обеспечить требуемые значения αj для aj.
Представленный способ-прототип подходит для выполнения коррекции на ДО только в инерциальной системе координат, когда можно принять условие, что главный вектор момента от всех действующих на КА сил постоянен (  = const).
= const).
В случае коррекции орбиты с поддержанием ориентации в опорных физических базисах указанный вектор становится функцией времени, т.е.  . Следовательно, становится функцией времени и вектор управляющего момента
. Следовательно, становится функцией времени и вектор управляющего момента  . Если это принять во внимание, то метод линейного программирования не подходит для поиска рассмотренных оптимальных решений, касающихся функционала Z, т.к. функционал будет содержать уже нелинейные составляющие.
. Если это принять во внимание, то метод линейного программирования не подходит для поиска рассмотренных оптимальных решений, касающихся функционала Z, т.к. функционал будет содержать уже нелинейные составляющие.
В подавляющем же большинстве случаев указанная коррекция КА спутников-ретрансляторов (в том числе и рассмотренного в описании прототипа) проводится в орбитальной системе координат. Причем установленные ДО, как правило, не располагают большой тягой, поэтому импульс может длиться десятки минут. Не учитывать этого нельзя при решении оптимизационных задач.
Следовательно, при управлении КА с помощью реактивных исполнительных органов при коррекции орбиты с использованием для поддержания ориентации опорного физического базиса и оптимизации самого процесса управления необходимы другие, отличные от прототипа, принципы формирования управляющих сил и моментов.
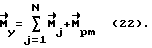
Блок-схема системы, реализующей способ-прототип, представлена на фиг.1, где введены следующие обозначения: 1 - блок скорости коррекции (БСК); 2 - блок датчиков внешней информации опорного базиса (БДВИ); 3 - блок определения управляющих сил и моментов (БОУСМ); 4 - блок формирования управляющих сил и моментов (БФУСМ); 5 - блок определяемых значений продолжительности импульсов ДО (БОЗПИД); 6 - блок ДО (БДО); 7 - корпус КА (ККА); 8 - блок датчиков угловой скорости (БДУС); 9 - блок датчиков линейных ускорений (БДЛУ); 10 - блок задания параметров управления КА (БЗПУКА).
При этом выходы БСК 1 и БДВИ 2 соединены соответственно с первым и вторым входом БОУСМ 3, а выход БОУСМ 3 соединен с первым входом БФУСМ 4. Выход БФУСМ 4 соединен с первым входом БОЗПИД 5, а выход БОЗПИД 5 соединен со входом БДО 6. В свою очередь БДО 6 соединен со вторым входом БОЗПИД 5. На корпусе КА 7 установлены БДО 6, БДУС 8 и ДЛУ 9. При этом выход БДУС 8 соединен с третьим входом БОУСМ 3, а выход БДЛУ 9 соединен с первым входом БСК 1. Первый, второй, третий и четвертый выходы БЗПУКА 10 соединены соответственно с входом БДВИ 2, вторым входом БСК 1, четвертым входом БОУСМ 3 и вторым входом БФУСМ 4.
Указанная система составлена в соответствии с описанием, представленным для прототипа [3]. Так БСК 1 и БДВИ 2 по функциональному назначению аналогичны блоку получения сигналов управления положением КА на фиг.2 прототипа. Под управлением положением в описании прототипа понимается как управление положением осей связанного базиса относительно осей опорного физического базиса (т.е. его ориентацией), так и управление положением КА в пространстве при перемещении его центра масс (т.е. его коррекцией). Для большего функционального разграничения, необходимого в последующем при описании системы, были введены два указанных блока.
БОУСМ 3 аналогичен блоку выработки сигналов управления для получения  , представленному на фиг. 2 описания прототипа.
, представленному на фиг. 2 описания прототипа.
БФУСМ 4 объединил в себя по функциональному назначению нижеследующие блоки прототипа: блок формирования уравнений (1-6), представленных в описании; блок получения функционала Z; блок линейной оптимизации или блок поиска решения для получения значений αs, , максимизирующих функционал Z.
БОЗПИД 5 аналогичен блоку полученных значений αs для использования в ДО, представленному на фиг. 2 описания прототипа.
Блоки на фиг. 2 описания прототипа объединены в один блок регулятор выработки для ДО сигналов управления, представленный там же на фиг.1а. Указанный блок имеет прямую и обратную связь с каждым из ДО, входящим в БДО 6.
На фиг.1а описания прототипа показан также блок датчиков положения осей крена, тангажа и рыскания. Под "положением" в описании понимается как угловое положение, так и линейное. Поэтому на фиг. 1 показаны БДУС 8 и БДЛУ 9 (например, 3-осный акселерометр). Связи БДУС 8 с БОУСМ 3 и БДЛУ 9 с БСК 1 на фиг. 1 отображают аналогичные связи блока датчиков положения осей крена, тангажа и рыскания с блоком регулятором выработки для ДО сигналов управления на фиг.1а описания прототипа.
БЗПУКА 10 является аналогом блока задания максимальных номинальных значений моментов и сил, представленного на фиг.2 описания прототипа. Однако, кроме указанных функций при помощи БЗПУКА 10 можно также задавать другие параметры управления. В частности, задавать параметры, определяющие скорость коррекции, а также выбирать и управлять режимами ориентации. Указанные функциональные возможности приведены также в описании прототипа, где указывается, что информация об ориентации может быть получена при помощи звездного датчика, использующего в качестве ориентира полярную звезду. А информация, необходимая для задания скорости коррекции, может быть получена за счет измерения орбиты КА с помощью наземных радаров, использующих при этом доплеровский эффект для определения положения и скорости КА. Далее информация о начале режима ориентации, ее виде и скорости коррекции может быть передана в блок регулятор выработки для ДО сигналов управления через антенну.
Работает система следующим образом.
С помощью БЗПУКА 10 выбирается требуемый режим ориентации путем включения необходимого датчика, входящего в состав БДВИ 2 и подтверждения выбора режима ориентации в БОУСМ 3. Одновременно в БСК 1 задаются параметры коррекции орбиты КА, включающие величину и направления вектора скорости коррекции.
Задачу построения и поддержания ориентации решает БОУСМ 3, который содержит в себе кинематический контур системы управления движением (подробнее описание работы кинематического контура представлено, например, при описании заявки [4] на изобретение). Для этого используется информация с БДВИ 2 и БДУС 8.
В конечном итоге в кинематическом контуре управления формируются кинематические параметры (например, в виде кватерниона), характеризующие рассогласование между связанным базисом КА и опорным физическим. Для устранения указанного рассогласования в динамический контур управления выдаются требования на управляющие моменты Ti в виде управляющих сигналов на выходе БОУСМ 3.
Значение вектора скорости коррекции также передается БОУСМ 3 с БСК 1. По величине и направлению указанного вектора БОУСМ 3 определяются требуемые Fi для проведения коррекции, которые также передаются в БФУСМ 4. Начало выполнения режима ориентации или режима коррекции и поддержания ориентации задается командами, выдаваемыми БЗПУКА 10 и БОУСМ 3. Указанными командами на выход БОУСМ 3 пропускаются либо требования на Ti, либо на Ti и Fi.
БФУСМ 4 определенным образом, описанным в способе, формирует значения αsj= τjαj, , максимизирующие функционал Z. Сформированные значения передаются в БОЗПИД 3, где сигналы, их описывающие, усиливаются, запоминаются и транслируются с установленной продолжительностью τj на пусковые клапаны ДО. В свою очередь, с каждого ДО идет в БОЗПИД 3 квитанция о начале работы двигателей. Как только длительность τj работы двигателя достигает запомненной величины, он отключается (прекращается подача управляющего сигнала на пусковые клапаны).
Для поддержания заданной ориентации в процессе коррекции орбиты КА в кинематическом контуре управления используется как информация с БДВИ 2, так и БДУС 8.
Величину полученного ускорения измеряет БДЛУ 9 и передает в БСК 1, где оно интегрируется и сравнивается с величиной заложенного (расчетного) значения. При достижении кажущейся скорости величины заложенного значения, требование с БСК 1 в БОУСМ 3 на получение составляющих Fi вектора силы снимается. На этом режим коррекции заканчивается и получается заданный режим ориентации.
Недостатки, перечисленные для способа-прототипа, характерны и для системы. Так система не содержит блоков, содержащих силовые гироскопы и производящих контроль за их работой. БФУСМ 4 не отражает логику работы для силовых гироскопов, т.к. значения α от 0 до 1, как уже подчеркивалось, не всегда могут быть получены. В логику же работы указанного блока заложено обратное.
При выполнении коррекции орбиты не в инерциальной системе координат, а с использованием внешних опорных физических базисов, оптимизация функционала Z в БФУСМ 4 методом линейного программирования не возможна, т.к.  вектор управляющего момента будет функцией времени. Управление вестись будет, но утверждение о том, что при этом будут "минимизироваться ошибки между требуемыми моментами управления и реальными", по меньшей мере, неисправедливо.
вектор управляющего момента будет функцией времени. Управление вестись будет, но утверждение о том, что при этом будут "минимизироваться ошибки между требуемыми моментами управления и реальными", по меньшей мере, неисправедливо.
Указанные недостатки способа-прототипа и системы его реализующей не позволяют провести оптимальное управление КА с использованием одновременно в качестве исполнительных органов реактивных двигателей ориентации и силовых гироскопов, направленное на получение максимального значения величины характеристической скорости коррекции, с минимизацией при этом ошибки между требуемыми моментами управления и реальными. Кроме того, указанный способ управления и система его реализующая не распространяются в полной мере на силовые гироскопы, т.к. последние являются запоминающей моментной системой.
Техническим результатом, достигаемым данными изобретениями, является получение максимального значения скорости коррекции КА с минимальными ошибками между требуемыми моментами управления и реальными, используя при этом для управления одновременно реактивные двигатели ориентации и силовые гироскопы.
Указанный технический результат достигается тем, что в способе управления КА с помощью реактивных исполнительных органов, включающем определение требуемого значения скорости коррекции КА, измерение параметров для поддержания ориентации, содержащих угловую скорость КА, определение управляющих сил и моментов для коррекции орбиты с помощью реактивных двигателей ориентации при одновременном поддержании заданной ориентации, формирование управляющих сил и моментов при помощи реактивных двигателей ориентации, измерение скорости коррекции орбиты КА, в процессе коррекции орбиты при помощи двигателей ориентации, поддержание заданной ориентации производят силовыми гироскопами, при этом измеряют значение вектора кинетического момента в системе силовых гироскопов, по известным значениям моментов инерции КА, а также по измеренным значениям векторов угловой скорости КА и кинетического момента в системе силовых гироскопов определяют в текущие моменты времени t значения суммарного вектора кинетического момента  , определяют выполнение условия принадлежности значений
, определяют выполнение условия принадлежности значений  области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы силовых гироскопов в момент времени (ts) определяют суммарные значения векторов управляющих моментов
области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы силовых гироскопов в момент времени (ts) определяют суммарные значения векторов управляющих моментов  от двигателей ориентации при условии поочередного отключения каждого q-го двигателя, где q=1, 2, ...n - номера двигателей ориентации, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых
от двигателей ориентации при условии поочередного отключения каждого q-го двигателя, где q=1, 2, ...n - номера двигателей ориентации, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых  имеет наибольшую проекцию на направление, противоположное вектору
имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае когда моменты
при соответствующем отключенном двигателе ориентации, а в случае когда моменты  не являются разгрузочными, для разгрузки силовых гироскопов включают пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
не являются разгрузочными, для разгрузки силовых гироскопов включают пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  , при этом никакой из указанных q-х ДО не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения суммарного вектора кинетического момента
, при этом никакой из указанных q-х ДО не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения суммарного вектора кинетического момента  для случая коррекции КА с учетом всех работающих q-х двигателей от текущего момента времени разгрузки
для случая коррекции КА с учетом всех работающих q-х двигателей от текущего момента времени разгрузки  до расчетного момента времени окончания коррекции tkη, , при этом
до расчетного момента времени окончания коррекции tkη, , при этом  , где η = 1, 2, 3,..., Δt - продолжительность минимального импульса разгрузочного момента,
, где η = 1, 2, 3,..., Δt - продолжительность минимального импульса разгрузочного момента,  , где Vu - величина, определяющая заданную скорость коррекции КА,
, где Vu - величина, определяющая заданную скорость коррекции КА,  - текущее значение скорости коррекции на момент времени
- текущее значение скорости коррекции на момент времени  - расчетное значение ускорения КА от двигателей ориентации, участвующих в коррекции орбиты, суммируют спрогнозированные значения
- расчетное значение ускорения КА от двигателей ориентации, участвующих в коррекции орбиты, суммируют спрогнозированные значения  с текущим значением суммарного вектора
с текущим значением суммарного вектора  , определенным на момент начала прогноза
, определенным на момент начала прогноза  , проверяют условие принадлежности полученных векторных сумм области S, кроме того, одновременно проверяют условие непринадлежности
, проверяют условие принадлежности полученных векторных сумм области S, кроме того, одновременно проверяют условие непринадлежности  области S и, если в момент времени
области S и, если в момент времени  не выполняется оба условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного q-го двигателя к коррекции орбиты или отключения разгрузочной пары двигателей ориентации, далее продолжают проверять выполнение условия принадлежности вектора
не выполняется оба условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного q-го двигателя к коррекции орбиты или отключения разгрузочной пары двигателей ориентации, далее продолжают проверять выполнение условия принадлежности вектора  области S вплоть до завершения коррекции и в случае его невыполнения повторяют разгрузку системы силовых гироскопов при помощи ДО, создающих указанный момент
области S вплоть до завершения коррекции и в случае его невыполнения повторяют разгрузку системы силовых гироскопов при помощи ДО, создающих указанный момент  , или при помощи разгрузочной пары двигателей ориентации, не участвующих в коррекции орбиты; в системе управления космическим аппаратом с помощью реактивных исполнительных органов, содержащей блок скорости коррекции, блок датчиков внешней информации опорного базиса, блок определения управляющих сил и моментов, блок формирования управляющих сил и моментов, блок определяемых значений продолжительности импульсов двигателей ориентации, блок двигателей ориентации, блок датчиков угловой скорости, блок датчиков линейных ускорений, блок задания параметров управления КА, при этом выходы блоков скорости коррекции и датчиков внешней информации опорного базиса соединены соответственно с первым и вторым входом блока определения управляющих сил и моментов, а выход указанного блока соединен с первым входом блока формирования управляющих сил и моментов, выход блока формирования управляющих сил и моментов соединен с первым входом блока определяемых значений продолжительности импульсов двигателей ориентации, а выход указанного блока соединен со входом блока двигателей ориентации, в свою очередь выход блока двигателей ориентации соединен со вторым входом блока определяемых значений продолжительности импульсов двигателей ориентации, выход блока датчиков угловой скорости соединен с третьим входом блока определения управляющих сил и моментов, а выход блока датчиков линейных ускорений соединен с первым входом блока скорости коррекции, первый, второй, третий и четвертый выходы блока задания параметров управления КА соединены соответственно с входом блока датчиков внешней информации опорного базиса, вторым входом блока скорости коррекции, четвертым входом блока определения управляющих сил и моментов и вторым входом блока формирования управляющих сил и моментов, дополнительно включены блок силовых гироскопов, блок определения значений суммарного вектора кинетического момента, блок сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, блок формирования текущего времени разгрузки силовых гироскопов, блок прогнозируемых значений суммарного вектора кинетического момента, блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, блок определения времени окончания режима коррекции, при этом блок формирования управляющих сил и моментов выполнен в виде составляющих его: блока выбора двигателей ориентации для коррекции орбиты, блока формирования разгрузочного момента для системы силовых гироскопов, блока определения разгрузочных моментов для системы силовых гироскопов, блока выбора разгрузочного момента для системы силовых гироскопов, блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, причем вход блока силовых гироскопов соединен со вторым выходом блока определения управляющих сил и моментов, а выход блока силовых гироскопов соединен с первым входом блока определения значений суммарного вектора кинетического момента, первый выход блока определения значений суммарного вектора кинетического момента соединен с первым входом блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, а второй выход этого же блока - с первым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям и третьим входом блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, второй вход блока определения значений суммарного вектора кинетического момента соединен с выходом блока датчиков угловой скорости, а выход блока формирования текущего времени разгрузки силовых гироскопов соединен с третьим входом блока определения значений суммарного вектора кинетического момента и первыми входами блока прогнозируемых значений суммарного вектора кинетического момента и блока определения времени окончания режима коррекции, первый выход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с первым входом блока формирования текущего времени разгрузки силовых гироскопов, а второй выход этого же блока - с третьим входом блока формирования управляющих сил и моментов, выполненным в виде первых входов блоков определения разгрузочных моментов для системы силовых гироскопов и выбора разгрузочного момента для системы силовых гироскопов, третий выход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с четвертым входом блока формирования управляющих сил и моментов, выполненным в виде третьих входов блоков формирования разгрузочного момента для системы силовых гироскопов и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, кроме того, третий выход указанного блока соединен со вторым входом блока формирования текущего времени разгрузки силовых гироскопов, второй вход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с пятым выходом блока задания параметров управления КА, а четвертый вход этого же блока - с выходом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, выход блока прогнозируемых значений суммарного вектора кинетического момента соединен со вторым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, второй вход блока прогнозируемых значений суммарного вектора кинетического момента соединен с выходом блока определения времени окончания режима коррекции, третий вход этого же блока соединен с третьим выходом блока формирования управляющих сил и моментов, выполненным в виде вторых выходов блоков выбора двигателей ориентации для коррекции орбиты и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, а четвертый вход блока прогнозируемых значений суммарного вектора кинетического момента соединен с шестым выходом блока задания параметров управления КА, второй вход блока определения времени окончания режима коррекции соединен со вторым выходом блока скорости коррекции, а третий вход этого же блока - со вторым выходом блока формирования управляющих сил и моментов, являющимся одновременно вторым выходом блока формирования разгрузочного момента для системы силовых гироскопов, первый вход блока выбора двигателей ориентации для коррекции орбиты является одновременно первым входом блока формирования управляющих сил и моментов, а второй вход блока формирования управляющих сил и моментов выполнен в виде вторых входов блоков выбора двигателей ориентации для коррекции орбиты и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, первый выход блока выбора двигателей ориентации для коррекции орбиты соединен с первым входом блока формирования разгрузочного момента для системы силовых гироскопов и вторым входом блока определения разгрузочных моментов для системы силовых гироскопов, второй вход блока формирования разгрузочного момента для системы силовых гироскопов соединен с выходом блока выбора разгрузочного момента для системы силовых гироскопов, первый выход блока определения разгрузочных моментов для системы силовых гироскопов соединен со вторым входом блока выбора разгрузочного момента для системы силовых гироскопов, а второй выход этого же блока соединен с первым входом блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов.
, или при помощи разгрузочной пары двигателей ориентации, не участвующих в коррекции орбиты; в системе управления космическим аппаратом с помощью реактивных исполнительных органов, содержащей блок скорости коррекции, блок датчиков внешней информации опорного базиса, блок определения управляющих сил и моментов, блок формирования управляющих сил и моментов, блок определяемых значений продолжительности импульсов двигателей ориентации, блок двигателей ориентации, блок датчиков угловой скорости, блок датчиков линейных ускорений, блок задания параметров управления КА, при этом выходы блоков скорости коррекции и датчиков внешней информации опорного базиса соединены соответственно с первым и вторым входом блока определения управляющих сил и моментов, а выход указанного блока соединен с первым входом блока формирования управляющих сил и моментов, выход блока формирования управляющих сил и моментов соединен с первым входом блока определяемых значений продолжительности импульсов двигателей ориентации, а выход указанного блока соединен со входом блока двигателей ориентации, в свою очередь выход блока двигателей ориентации соединен со вторым входом блока определяемых значений продолжительности импульсов двигателей ориентации, выход блока датчиков угловой скорости соединен с третьим входом блока определения управляющих сил и моментов, а выход блока датчиков линейных ускорений соединен с первым входом блока скорости коррекции, первый, второй, третий и четвертый выходы блока задания параметров управления КА соединены соответственно с входом блока датчиков внешней информации опорного базиса, вторым входом блока скорости коррекции, четвертым входом блока определения управляющих сил и моментов и вторым входом блока формирования управляющих сил и моментов, дополнительно включены блок силовых гироскопов, блок определения значений суммарного вектора кинетического момента, блок сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, блок формирования текущего времени разгрузки силовых гироскопов, блок прогнозируемых значений суммарного вектора кинетического момента, блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, блок определения времени окончания режима коррекции, при этом блок формирования управляющих сил и моментов выполнен в виде составляющих его: блока выбора двигателей ориентации для коррекции орбиты, блока формирования разгрузочного момента для системы силовых гироскопов, блока определения разгрузочных моментов для системы силовых гироскопов, блока выбора разгрузочного момента для системы силовых гироскопов, блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, причем вход блока силовых гироскопов соединен со вторым выходом блока определения управляющих сил и моментов, а выход блока силовых гироскопов соединен с первым входом блока определения значений суммарного вектора кинетического момента, первый выход блока определения значений суммарного вектора кинетического момента соединен с первым входом блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, а второй выход этого же блока - с первым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям и третьим входом блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента, второй вход блока определения значений суммарного вектора кинетического момента соединен с выходом блока датчиков угловой скорости, а выход блока формирования текущего времени разгрузки силовых гироскопов соединен с третьим входом блока определения значений суммарного вектора кинетического момента и первыми входами блока прогнозируемых значений суммарного вектора кинетического момента и блока определения времени окончания режима коррекции, первый выход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с первым входом блока формирования текущего времени разгрузки силовых гироскопов, а второй выход этого же блока - с третьим входом блока формирования управляющих сил и моментов, выполненным в виде первых входов блоков определения разгрузочных моментов для системы силовых гироскопов и выбора разгрузочного момента для системы силовых гироскопов, третий выход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с четвертым входом блока формирования управляющих сил и моментов, выполненным в виде третьих входов блоков формирования разгрузочного момента для системы силовых гироскопов и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, кроме того, третий выход указанного блока соединен со вторым входом блока формирования текущего времени разгрузки силовых гироскопов, второй вход блока сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента соединен с пятым выходом блока задания параметров управления КА, а четвертый вход этого же блока - с выходом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, выход блока прогнозируемых значений суммарного вектора кинетического момента соединен со вторым входом блока приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям, второй вход блока прогнозируемых значений суммарного вектора кинетического момента соединен с выходом блока определения времени окончания режима коррекции, третий вход этого же блока соединен с третьим выходом блока формирования управляющих сил и моментов, выполненным в виде вторых выходов блоков выбора двигателей ориентации для коррекции орбиты и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, а четвертый вход блока прогнозируемых значений суммарного вектора кинетического момента соединен с шестым выходом блока задания параметров управления КА, второй вход блока определения времени окончания режима коррекции соединен со вторым выходом блока скорости коррекции, а третий вход этого же блока - со вторым выходом блока формирования управляющих сил и моментов, являющимся одновременно вторым выходом блока формирования разгрузочного момента для системы силовых гироскопов, первый вход блока выбора двигателей ориентации для коррекции орбиты является одновременно первым входом блока формирования управляющих сил и моментов, а второй вход блока формирования управляющих сил и моментов выполнен в виде вторых входов блоков выбора двигателей ориентации для коррекции орбиты и выбора пары двигателей ориентации для разгрузки системы силовых гироскопов, первый выход блока выбора двигателей ориентации для коррекции орбиты соединен с первым входом блока формирования разгрузочного момента для системы силовых гироскопов и вторым входом блока определения разгрузочных моментов для системы силовых гироскопов, второй вход блока формирования разгрузочного момента для системы силовых гироскопов соединен с выходом блока выбора разгрузочного момента для системы силовых гироскопов, первый выход блока определения разгрузочных моментов для системы силовых гироскопов соединен со вторым входом блока выбора разгрузочного момента для системы силовых гироскопов, а второй выход этого же блока соединен с первым входом блока выбора пары двигателей ориентации для разгрузки системы силовых гироскопов.
На фиг. 1 представлена блок-схема системы управления КА с помощью реактивных исполнительных органов, являющейся прототипом предлагаемой системы: на фиг. 2, 3 представлены схемы расположения ДО на корпусе КА; на фиг. 4 - блок-схема предлагаемой системы управления КА с помощью реактивных исполнительных органов; на фиг. 5 - блок-схема блока формирования управляющих сил и моментов, входящего в состав предлагаемой системы; на фиг. 6, 7 - примеры реализации блоков предлагаемой системы.
Рассмотрим сущность предлагаемого способа, взяв для примера в качестве КА геостационарный спутник с блоком двигателей ориентации и их установкой, указанной на фиг. 2, 3. При этом на фиг. 2, 3 введены следующие новые обозначения: OXYZ - оси связанного базиса; 11 - 34 - ДО; ⊕ - смещенное положение центра масс КА; → - направление действия векторов сил тяги ДО.
Предположим также, что на выбранный КА установлена система СГ с областью S, описанной сферой радиусом Rсф.
Пусть, например, нам необходимо провести коррекцию орбиты в направлении оси ОХ (см. фиг. 2, 3). Для этого необходимо включить двигатели 31 - 34. В результате смещения центра масс ККА 7 двигателями 31 и 32 будет создаваться возмущающий момент. Указанный момент нежелателен, т.к. он нарушает заданную ориентацию КА. Для его компенсации можно включить либо двигатели 20, 22, направленные навстречу, т. е. создающие противоположный момент, либо (чему отдается предпочтение в прототипе) путем выработки меньшей силы двигателями 31 и 33. Очевидно, что в том и другом случае указанное управление приведет к уменьшению результирующей силы RΣ в направлении оси ОХ и ее импульса (RΣΔτ). . Следовательно, уменьшится ускорение КА и увеличится продолжительность выдачи корректирующего импульса. Что, как подчеркивается и в прототипе, крайне нежелательно.
В предлагаемом способе управления компенсацию возникшего возмущающего момента можно проводить при помощи системы СГ. При этом коррекцию предлагается проводить с максимальным значением RΣΔτ. . В данном случае можно максимально использовать тягу двигателей 31 - 34.
Для этого в процессе коррекции орбиты измеряем значения вектора кинетического момента, накопленного в системе СГ  , и значения вектора абсолютной угловой скорости КА
, и значения вектора абсолютной угловой скорости КА  . Определяем кинетический момент корпуса КА
. Определяем кинетический момент корпуса КА  .
.
 ,
,
где
Iк - тензор инерции КА.
Далее определяем суммарный вектор кинетического момента 
 .
.
Момент начала режима насыщения (ts) системы СГ определяем по началу невыполнения условия .
.
Для рассматриваемого случая проверяется неравенство ,
,
где
Ks - коэффициент "принятия решения", характеризующий ту часть области S, которую необходимо оставить для временной задержки на принятие решения и осуществления режима разгрузки СГ, не потеряв при этом управляемость системы СГ. Величина Ks зависит от размеров области S и "темпа накопления" кинетического момента. Например, для системы гиродинов (двухстепенных СГ), установленных на орбитальном комплексе "Мир", Ks = 0,95. Для спутников рассматриваемого класса можно принять Ks ≈ 0,97.
Момент невыполнения неравенства (6) фиксируется как момент времени насыщения системы ts и принятия решения на разгрузку от накопленного кинетического момента.
Для выполнения условия разгрузки необходимо, чтобы вектор  и вектор разгрузочного момента были противоположно направлены, причем, чем больше тупой угол между указанными векторами, тем быстрее происходит разгрузка системы СГ (подробно см., например, в [5]).
и вектор разгрузочного момента были противоположно направлены, причем, чем больше тупой угол между указанными векторами, тем быстрее происходит разгрузка системы СГ (подробно см., например, в [5]).
Определим вектора разгрузочных моментов при поочередном отключении двигателей ориентации, участвующих в коррекции орбиты. Так, при отключении двигателя 32  будет иметь значение
будет иметь значение ,
,
где - радиус-векторы точки приложения соответствующих тяг
- радиус-векторы точки приложения соответствующих тяг  двигателей. Аналогично распишем выражение для
двигателей. Аналогично распишем выражение для 
Каждый из составляющих моментов, входящих в выражения (7) - (10), можно расписать в виде (например, для  )
)
Значения радиус-векторов и величин тяг ДО могут быть уточнены в процессе полета и заложены на борт в виде программных уставок.
Заявим под q номера двигателей, участвующих в коррекции орбиты, т.е. q = 1, 2,...,n. При этом q-м номерам соответствуют позиции 11 - 34 на фиг. 2, 3. А для общей цифровой нумерации двигателей оставим индекс j, как и в описании прототипа, j = 1, 2, . .., N. Тогда при поочередном отключении указанных двигателей в процессе коррекции орбиты суммарные моменты от оставшихся работающих будут соответственно равны  .
.
В общем случае для разгрузки СГ должно выполняться условие .
.
Выбрав те  , для которых условие (12) выполняется, и обозначив их как
, для которых условие (12) выполняется, и обозначив их как  , определяем тот q'-й ДО, при отключении которого суммарный разгрузочный момент
, определяем тот q'-й ДО, при отключении которого суммарный разгрузочный момент  имеет наибольшую проекцию на направление, противоположное вектору
имеет наибольшую проекцию на направление, противоположное вектору  . Математически это условие можно выразить в виде
. Математически это условие можно выразить в виде ,
,
где
←→ - знак соответствия.
Однако в общем случае не всегда можно разгрузить систему СГ, выбрав и отключив q'-й ДО. Например, пусть двигатели 31 - 34 (см. фиг. 3) идеально взаимно компенсируют создаваемые управляющие моменты относительно осей OY и OZ, а относительно оси крена ОХ действует нерасчетный внешний возмущающий момент, приводящий к насыщению системы силовых гироскопов. Тогда ни одно из отключений q-х ДО не приведет к разгрузке СГ, т.к. каждый из  будет перпендикулярен вектору
будет перпендикулярен вектору  , или в случае, когда возмущающий момент от каждого из работающих для коррекции орбиты ДО направлен по трем осям КА, а вектор
, или в случае, когда возмущающий момент от каждого из работающих для коррекции орбиты ДО направлен по трем осям КА, а вектор  накапливается таким образом, что условие (12) выполнить невозможно. Для случая расположения ДО на ККА 7, указанного на фиг. 2, 3, при коррекции орбиты могут возникать случаи, когда
накапливается таким образом, что условие (12) выполнить невозможно. Для случая расположения ДО на ККА 7, указанного на фиг. 2, 3, при коррекции орбиты могут возникать случаи, когда  .
.
В таких случаях все моменты  не разгружают систему СГ, поэтому предлагается для этих целей использовать пару ДО не участвующих в коррекции орбиты. При этом не отключать q-й двигатель. Пару ДО выбираем для разгрузки потому, что в таком случае сохраняется максимальная величина корректирующего импульса. Из возможных вариантов выбора пар ДО для разгрузки СГ включают ту из них, момент которой имеет наибольшую проекцию на противоположное направление вектора
не разгружают систему СГ, поэтому предлагается для этих целей использовать пару ДО не участвующих в коррекции орбиты. При этом не отключать q-й двигатель. Пару ДО выбираем для разгрузки потому, что в таком случае сохраняется максимальная величина корректирующего импульса. Из возможных вариантов выбора пар ДО для разгрузки СГ включают ту из них, момент которой имеет наибольшую проекцию на противоположное направление вектора  , т.е.
, т.е.
 ,
,
где
p - 1, 2,..., P - номер пар ДО, удовлетворяющих условию разгрузки СГ .
.
 - вектора моментов от p-х пар ДО, удовлетворяющих условию разгрузки СГ;
- вектора моментов от p-х пар ДО, удовлетворяющих условию разгрузки СГ; - вектор разгрузочного момента, максимально удовлетворяющий условию разгрузки СГ.
- вектор разгрузочного момента, максимально удовлетворяющий условию разгрузки СГ.
Исходя из рассматриваемого примера коррекции орбиты с использованием ДО 31 - 34 (см. фиг. 2, 3) в качестве пар ДО для разгрузки СГ могут применяться двигатели 13 и 27, 11 и 29 или 14 и 28, 11 и 29.
Коррекцию орбиты с использованием одного двигателя ДО можно рассматривать как частичный случай предложенного способа управления. При этом разгрузку СГ в случае необходимости осуществляют отключением выбранного для коррекции двигателя и включением другого, управляющий момент которого  удовлетворяет условию разгрузки, т.е. чтобы вектора
удовлетворяет условию разгрузки, т.е. чтобы вектора  были противоположно направлены. Причем, как указывалось раньше, чем больше тупой угол между указанными векторами, тем быстрее происходит разгрузка системы СГ.
были противоположно направлены. Причем, как указывалось раньше, чем больше тупой угол между указанными векторами, тем быстрее происходит разгрузка системы СГ.
Сразу же по началу процесса разгрузки СГ необходимо определить и момент времени ее завершения (tz). Указанный момент времени tz будем определять из необходимой достаточности для завершения основного режима коррекции орбиты.
Следовательно, разгрузку СГ прекращаем в том случае, когда первое из значений вектора  на фиксированный текущий момент времени разгрузки t', может быть начальным условием, обеспечивающим завершение режима коррекции с полным составом выбранных именно для этого режима ДО.
на фиксированный текущий момент времени разгрузки t', может быть начальным условием, обеспечивающим завершение режима коррекции с полным составом выбранных именно для этого режима ДО.
Поиск tz будем производить на интервалах (t', tks), где tks момент завершения коррекции с учетом работы всех выбранных для коррекции ДО. Значение tks определяется следующим образом:
tks= (Vu-Vts)/aΣ (16), ,
где
Vu - заданная величина, определяющая скорость коррекции КА;
Vts - текущее значение кажущейся скорости коррекции на момент времени начала разгрузки СГ, определяется, например, как интегральная оценка измерений акселерометра с момента времени начала коррекции и до момента времени ts;
aΣ - расчетное ускорение, получаемое КА от работающих ДО, участвующих в коррекции его орбиты.
При этом поиск будем производить η- -ми шагами, каждый из которых отличается от предыдущего на Δt, , т.е.
 ,
,
где
Δt - продолжительность минимального импульса разгрузочного момента  или
или  .
.
Определив первый момент времени как t'1 = ts + Δt, , осуществляем прогноз изменений вектора  на интервале (t'1, tk1) по выражению
на интервале (t'1, tk1) по выражению ,
,
где - главный вектор управляющего момента от всех работающих ДО без учета отключений q-х ДО;
- главный вектор управляющего момента от всех работающих ДО без учета отключений q-х ДО; - главный вектор момента всех внешних возмущающих сил [6, с. 121 - 177].
- главный вектор момента всех внешних возмущающих сил [6, с. 121 - 177].
Значение  известно, например в результате тестовых включений ДО, как указано в описании прототипа, а
известно, например в результате тестовых включений ДО, как указано в описании прототипа, а ,
,
где - измеренное значение скорости коррекции КА на момент времени
- измеренное значение скорости коррекции КА на момент времени  .
.
Прогноз осуществляем с нулевыми начальными условиями по вектору  и далее суммируем спрогнозированные значения с реальными начальными условиями, полученными по выражению (4) на момент времени t'1
и далее суммируем спрогнозированные значения с реальными начальными условиями, полученными по выражению (4) на момент времени t'1 .
.
Далее проверяем выполнение условия: .
.
И если оно выполняется, то tz: = t'1, иначе выбираем t'2 = ts + 2 Δt и повторяем цикл расчетов на момент времени t'2 и т.д. до выполнения условия (20).
Однако не всегда за один полный цикл η-x разгрузок мы можем обеспечить требуемые начальные условия  , обеспечивающие завершение режима коррекции. Раньше мы можем выйти на границу области S, т.е. "перегрузив" систему СГ, переведя текущий вектор
, обеспечивающие завершение режима коррекции. Раньше мы можем выйти на границу области S, т.е. "перегрузив" систему СГ, переведя текущий вектор  с одной точки предельной поверхности области S к другой. В таком случае разгрузку СГ необходимо прекращать в любом случае, т.к. теряется управляемость системой СГ.
с одной точки предельной поверхности области S к другой. В таком случае разгрузку СГ необходимо прекращать в любом случае, т.к. теряется управляемость системой СГ.
Следовательно, наряду с выполнением условия (20), мы должны одновременно проверять выполнение условия
и, если оно не выполняется, прекращать разгрузку СГ путем подключения q-го ДО к коррекции орбиты или отключения пары p-x ДО.
Второй случай прекращения разгрузки по невыполнению условия (21) говорит о том, что проведенный цикл разгрузки не последний до конца коррекции орбиты. В дальнейшем, после очередного выхода на поверхность области S вектором  , цикл разгрузки необходимо будет повторить.
, цикл разгрузки необходимо будет повторить.
Однако в любом случае необходимо после завершения разгрузки проверять выполнение условия (5) вплоть до завершения режима коррекции орбиты. Это связано с тем, что в прогнозируемых величинах могут в любой момент времени пройти неучтенные изменения, что и приведет к нерасчетному выходу вектора  на поверхность области S.
на поверхность области S.
В указанных случаях срыва основного режима коррекции орбиты не происходит, а дополнительно производится разгрузка СГ при помощи  или
или  , совмещенная с основным режимом.
, совмещенная с основным режимом.
Для реализации предлагаемого способа управления разработан один из вариантов системы управления. Блок-схема указанной системы приведена на фиг. 4, где кроме ранее описанных блоков 1 - 10, дополнительно введены следующие: 35 - блок силовых гироскопов (БСГ); 36 - блок определения значений суммарного вектора кинетического момента (БОЗСВКМ); 37 - блок сравнения параметров области располагаемых значений вектора кинетического момента в системе силовых гироскопов и суммарного вектора кинетического момента СГ (БСПОРЗВК МСГСВКМ); 38 - блок формирования текущего времени разгрузки СГ (БФТВРСГ); 39 - блок прогнозируемых значений суммарного вектора кинетического момента (БПЗСВКМ); 40 - блок приведения прогнозируемых значений суммарного вектора кинетического момента к начальным условиям (БППЗСВКМНУ); 41 - блок определения времени окончания режима коррекции (БОВОРК).
При этом вход БСГ 35 соединен со вторым выходом БОУСМ 3, а выход БСГ 35 соединен с первым входом БОЗСВКМ 36. Первый выход БОЗСВКМ 36 соединен с первым входом БСПОРЗВКМСГСВКМ 37, а второй выход этого же блока - с первым входом БППЗСВКМНУ 40 и третьим входом БСПОРЗВКМСГСВКМ 37. Второй вход БОЗСВКМ 36 соединен с выходом БДУС 8. А выход БФТВРСГ 38 соединен с третьим входом БОЗСВКМ 36 и первыми входами БПЗСВКМ 39 и БОВОРК 41. Первый выход БСПОРЗВКМСГСВКМ 37 соединен с первым входом БФТВРСГ 38, а второй выход этого же блока - с третьим входом БФУСМ 4. Третий выход БСПОРЗВКМСГСВКМ 37 соединен с четвертым входом БФУСМ 4 и вторым входом БФТВРСГ 35. Второй вход БСПОРЗВКМСГСВКМ 37 соединен с пятым выходом БЗПУКА 10, а четвертый вход этого же блока - с выходом БППЗСВКМНУ 40.
Выход БПЗСВКМ 39 соединен со вторым входом БППЗСВКМНУ 40. Второй вход БПЗСВКМ 39 соединен с выходом БОВОРК 41, третий и четвертый входы этого же блока соединены соответственно с третьим выходом БФУСМД 4 и шестым выходом БЗПУКА 10.
Второй вход БОВОРК 41 соединен со вторым выходом БСК 1, а третий вход этого же блока соединен со вторым выходом БФУСМ 4.
Кроме того, в отличие от прототипа БФУСМ 4 содержит следующие блоки (см. фиг. 5): 42 - блок выбора ДО для коррекции орбиты (БВДКО); 43 - блок формирования разгрузочного момента для системы СГ (БФРМСГ); 44 - блок определения разгрузочных моментов для системы СГ (БОРМСГ); 45 - блок выбора разгрузочного момента для системы СГ (БВРМСГ); 46 - блок выбора пары ДО для разгрузки системы СГ (БВПДРСГ).
При этом первый вход БВДКО 42 соединен с БОУСМ 3, а второй вход - с четвертым выходом БЗПУКА 10. Первый выход БВДКО 42 соединен с первым входом БФРМСГ 43 и вторым входом БОРМСГ 44. А второй выход этого же блока соединен с третьим выходом БФУСМ 4. Первый выход БФРМСГ 43 является одновременно первым выходом БФУСМ 4, а второй выход этого же блока является вторым выходом БФУСМ 4. Второй вход БФРМСГ 43 соединен с выходом БВРМСГ 45, а третий вход указанного блока является четвертым входом БФУСМ 4.
Первый вход БОРМСГ 44 соединен с третьим входом БФУСМ 4, а третий вход указанного блока соединен с четвертым выходом БЗПУКА 10. Первый выход БОРМСГ 44 соединен со вторым входом БВРМСГ 45, а второй выход этого же блока соединен с первым входом БВПДРСГ 46. Первый вход БВРМСГ 45 соединен с третьим входом БФУСМ 4.
Второй вход БВПДРСГ 46 соединен с выходом БЗПУКА 10, а третий вход этого же блока соединен с четвертым входом БФУСМ 4. Первый выход БВПДРСГ 46 соединен с первым выходом БФУСМ 4, а второй выход этого же блока - с третьим выходом БФУСМ 4.
Рассмотрим примеры реализации указанных блоков.
БСГ 35 может быть выполнен на основе двухстепенных СГ. Схема указанного блока и ее описание представлены в [4, с. 12-14].
Блоки 36-46 и их функциональные связи могут быть реализованы с использованием микропроцессорной техники, например на базе одного из процессоров трехканального исполнения ЦВМ "Электроника" МС1201.02-02 (см. [7]) с дополнительными контроллерами ввода-вывода.
На фиг. 6, 7 показан пример такой реализации, при этом введены новые обозначения: 47 - тактовый генератор (ТГ); 48 - процессор (П); 49 - дешифратор адреса (ДША); 50 - устройство ввода-вывода (УВВ); ШД(16)* - трехстабильная двухнаправленная 16-ти разрядная шина данных; ША(16)* - трехстабильная однонаправленная 16-ти разрядная шина адреса; ШУ(10) - шина управления (10 линий сигналов управления).
Блоки 36-46 набраны из стандартных ПЗУ емкостью 2кБайт. При этом число стандартных ПЗУ определяется объемом алгоритма решаемой в блоке задачи [8, с. 115-117] . Функциональные связи между блоками 36-46 реализованы за счет трехканального исполнения - через шины данных адреса и управления.
Через УВВ 50 осуществляется функциональная многоканальная связь четвертого - шестого выходов БЗПУКА 10 с соответствующими входами БСПОРЗВКМСГСВКМ 37, БПЗСВКМ 39, БВДКО 42, БОРМСГ 44 и БВПДРСГ 46.
Реализация указанной функциональной связи может быть осуществлена при помощи аппаратуры управляющего информационно-вычислительного комплекса (УИВК) "СТЕК-30". Подробное описание УИВК представлено в [4, с. 31-33].
Через УВВ 50 осуществляются также связи: второго выхода БСК1 с вторым входом БОВОРК 41; выхода БСГ 35 с первым входом БОЗСВКМ 36; первого выхода БОУСМ 3 с первым входом БВДКО 42; выхода БДУС 8 со вторым входом БОЗСВКМ 36. Кроме того, из вторых выходов блоков БФРМСГ 43 и БВПДРСГ 46 через УВВ 50 передается информация в БОЗПИД 5 на первый его вход.
Интерфейс указанных связей достаточно подробно описан в [4, с. 33-35] и для ЦВМ "Аполлон" [9, с. 253-299].
Работает система управления следующим образом. По началу выполнения режима коррекции орбиты с первого выхода БОУСМ 3 на первый вход БФУСМ 4 выдаются требования на формирование управляющих сил F1. Одновременно со второго выхода БОУСМ 3 выдаются требования в БСГ 35 на формирование управляющих моментов Ti. БСГ 35 формирует закон управления осями прецессии СГ (подробно см. [4, с. 12-13]) по затребованным управляющим моментам. При этом за счет измерений, проводимых в блоке синус-косинусных преобразователей углов поворота осей прецессии, входящего в состав БСГ 35, а также по известным значениям кинетических моментов роторов гиродвигателей, определяется значение вектора  в системе СГ. При этом непосредственно значение
в системе СГ. При этом непосредственно значение  определяется в БОЗСВКМ 36 по указанным измеренным значениям, поступающим на первый его вход с выхода БСГ 35. На второй вход БОЗСВКМ 36 поступает с БДУС 8 информация о значениях вектора абсолютной угловой скорости КА
определяется в БОЗСВКМ 36 по указанным измеренным значениям, поступающим на первый его вход с выхода БСГ 35. На второй вход БОЗСВКМ 36 поступает с БДУС 8 информация о значениях вектора абсолютной угловой скорости КА  . В самом БОЗСВКМ 36 имеются заранее заданные значения компонент тензора Iк. В результате в нем определяется значение вектора
. В самом БОЗСВКМ 36 имеются заранее заданные значения компонент тензора Iк. В результате в нем определяется значение вектора  в соответствии с выражением (4). С первого выхода БОЗСВКМ 36 значения
в соответствии с выражением (4). С первого выхода БОЗСВКМ 36 значения  поступают на первый вход БСПОРЗВКМСГСВКМ 37. В БСПОРЗВКМСГСВКМ 37 производится проверка выполнения условия (6). При этом параметры области S могут изменяться в зависимости от числа работающих в системе СГ. Указанные изменения в БСПОРЗВКМСГСВКМ 37 производятся при помощи БЗПУКА 10, пятый выход которого соединен со вторым выходом БСПОРЗВКМСГСВКМ 37.
поступают на первый вход БСПОРЗВКМСГСВКМ 37. В БСПОРЗВКМСГСВКМ 37 производится проверка выполнения условия (6). При этом параметры области S могут изменяться в зависимости от числа работающих в системе СГ. Указанные изменения в БСПОРЗВКМСГСВКМ 37 производятся при помощи БЗПУКА 10, пятый выход которого соединен со вторым выходом БСПОРЗВКМСГСВКМ 37.
В случае невыполнения условия (6) с первого выхода указанного блока на первый выход БФТВРСГ 38 выдается значение момента времени ts. Одновременно со второго выхода этого же блока на третий выход БФУСМ 14 выдается значение вектора  .
.
Как только БФТВРСГ 38 получает значение момента времени ts, он тут же формирует на своем выходе значение t'1 в соответствии с выражением (17). В свою очередь t'1 передается на третий вход БОЗСВКМ 36, на первый вход БПЗСВКМ 39 и на первый вход БОВОРК 41. По приходу в БОЗСВКМ 36 значения t'1 в нем происходит присвоение  , т.к. t: = t'1. Значение вектора
, т.к. t: = t'1. Значение вектора  поступает на первый вход БППЗСВКМНУ 40 и на третий вход БСПОРЗВКМСГСВКМ 37. В БППЗСВКМНУ 40 оно служит в качестве начального условия в выражении (19), а в БСПОРЗВКМСГСВКМ 37 оно необходимо для проверки условия (21). Значение t'1, переданное на первый вход БПЗСВКМ 19, устанавливает нижнюю границу определенного интеграла, входящего в выражение (18). Оно же задает в БОВОРК 41 момент времени начала определения второй верхней границы указанного интеграла: tк1. Так, по приходу этого времени в БОВОРК 41 из второго выхода БСК1 через второй вход БОВОРК 41 считывается значение
поступает на первый вход БППЗСВКМНУ 40 и на третий вход БСПОРЗВКМСГСВКМ 37. В БППЗСВКМНУ 40 оно служит в качестве начального условия в выражении (19), а в БСПОРЗВКМСГСВКМ 37 оно необходимо для проверки условия (21). Значение t'1, переданное на первый вход БПЗСВКМ 19, устанавливает нижнюю границу определенного интеграла, входящего в выражение (18). Оно же задает в БОВОРК 41 момент времени начала определения второй верхней границы указанного интеграла: tк1. Так, по приходу этого времени в БОВОРК 41 из второго выхода БСК1 через второй вход БОВОРК 41 считывается значение  , входящее в выражение (16'). Одновременно из второго выхода БФУСМ 4 на третий выход БОВОРК 41 приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. . Для этого используются известные силы тяги ДО и масса КА и производится расчет tк1 по выражению (16'). Далее информация о значении tк1 передается на второй вход БПЗСВКМ 39.
, входящее в выражение (16'). Одновременно из второго выхода БФУСМ 4 на третий выход БОВОРК 41 приходит информация о номерах ДО, участвующих в коррекции орбиты. По указанным номерам в блоке определяется aΣ. . Для этого используются известные силы тяги ДО и масса КА и производится расчет tк1 по выражению (16'). Далее информация о значении tк1 передается на второй вход БПЗСВКМ 39.
Информация о номерах ДО, первоначально участвующих в управлении, выдается также с третьего выхода БФУСМ 4 на третий вход БПЗСВКМ 39. При этом каждому двигателю ставится в соответствие управляющий момент  , который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМ 39 через четвертый его вход с шестого выхода БЗПУКА 10. Для ДО, не участвующих в управлении,
, который он создает. Причем значение указанных управляющих моментов задается в БПЗСВКМ 39 через четвертый его вход с шестого выхода БЗПУКА 10. Для ДО, не участвующих в управлении,  . По указанному каналу в БПЗСВКМ 39 выдаются также значения, определяющие значения
. По указанному каналу в БПЗСВКМ 39 выдаются также значения, определяющие значения  (углы ориентации КА в орбитальной системе координат, углы поворота солнечной батареи и т.д.).
(углы ориентации КА в орбитальной системе координат, углы поворота солнечной батареи и т.д.).
С третьего выхода БФУСМ 4 на третий вход БПЗСВКМ 39 выдаются также номера ДО для вектора  , см. (14). По значениям
, см. (14). По значениям  в БПЗСВКМ 39 определяется
в БПЗСВКМ 39 определяется 
 .
.
Далее  суммируется с полученным там же
суммируется с полученным там же  . Затем производится интегрирование на интервале установленных границ в соответствии с выражением (18).
. Затем производится интегрирование на интервале установленных границ в соответствии с выражением (18).
Полученные интегральные значения передаются с выхода БПЗСВКМ 39 через второй вход в БППЗСВКМНУ 40, где производится их приведение (суммирование) к начальным значениям  , см. (19). Полученные суммы с выхода БППЗСВКМНУ 40 передаются на четвертый вход БСПОРЗВКМСГСВКМ 37, где производится проверка выполнения условия (20).
, см. (19). Полученные суммы с выхода БППЗСВКМНУ 40 передаются на четвертый вход БСПОРЗВКМСГСВКМ 37, где производится проверка выполнения условия (20).
Если в БСПОРЗВКМСГСВКМ 37 при проверках не выполняется условие (20) и выполняется условие (21), то значение ts подтверждается в БФТВРСГ 38 и повторяется рассмотренный выше цикл разгрузки СГ на момент времени t'2 и т.д.
Если же в БСПОРЗВКМСГСВКМ 37 при проверках выполняется условие (20) или не выполняется условие (21), то с третьего выхода этого же блока выдается одновременно команда на четвертый вход БФУСМ 4 на снятие режима разгрузки СГ и на второй вход БФТВРСГ 38 - на прекращение поиска момента времени tz.
Рассмотрим отдельно работу БФУСМ 4, блок-схема которого представлена на фиг. 5. Как уже отмечалось выше, с первого выхода БОУСМ 3 на первый вход БФУСМ 4 поступают требования на получение управляющих сил Fi. В БВДКО 42, входящем в состав рассматриваемого блока и на первый вход которого приходят указанные требования, происходит выбор ДО, обеспечивающий получение заданных сил. Через второй вход БВДКО 42 из четвертого выхода БЗПУКА 10 периодически производится подтверждение работоспособности имеющейся номенклатуры ДО. С выхода БВДКО 42 информация о номерах, выбранных для коррекции ДО, поступает на первый вход БФРМСГ 43, который играет коммутационную роль в дальнейшем прохождении сигналов на свой первый выход, являющийся и выходом БФУСМ 4. Если запрета нет на прохождение указанных сигналов, они будут на выходе блока. Одновременно может также поступить сигнал на второй вход БФРМСГ 43, запрещающий включение любого из q-x двигателей, участвующих в коррекции орбиты.
Поиск номера двигателя для отключения начинается с момента прихода на третий вход БФУСМ 4 с БСПОРЗВКМСГСВКМ 37 сигнала, содержащего значение вектора  . Указанный сигнал поступает на первые входы БОРМСГ 44 и БВРМСГ 45. На второй вход БОРМСГ 44 поступают сигналы о выбранных для коррекции номерах ДО, а через третий вход этого же блока закладываются значения
. Указанный сигнал поступает на первые входы БОРМСГ 44 и БВРМСГ 45. На второй вход БОРМСГ 44 поступают сигналы о выбранных для коррекции номерах ДО, а через третий вход этого же блока закладываются значения  .
.
В блоке БОРМСГ44 сначала производится определение  , т.е. определяются суммарные управляющие моменты оставшихся ДО, при отключении q-го двигателя от коррекции орбиты. Далее из полученных
, т.е. определяются суммарные управляющие моменты оставшихся ДО, при отключении q-го двигателя от коррекции орбиты. Далее из полученных  выбираются
выбираются  , удовлетворяющие условию (12).
, удовлетворяющие условию (12).
Полученные значения  передаются с первого выхода указанного блока через второй вход в БВРМСГ 45.
передаются с первого выхода указанного блока через второй вход в БВРМСГ 45.
Если определить  не удается, то сигнал об этом передается со второго выхода БОРМСГ 44 на первый вход БВПДРСГ 46, причем в качестве указанного сигнала служит значение вектора
не удается, то сигнал об этом передается со второго выхода БОРМСГ 44 на первый вход БВПДРСГ 46, причем в качестве указанного сигнала служит значение вектора  .
.
БВРМСГ 45 осуществляет выбор в соответствии с (13) ДО под номером qm. Указанный номер передается через второй вход в БФРМСГ 43 и блокирует прохождение команды на включение ДО с соответствующим номером. Информация о числе работающих для режима коррекции ДО поступает со второго выхода БФРМСГ 43 (он же второй выход БФУСМ 4) на третий вход БОВОРК 41.
Как видно из описания, в случае когда в БОРМСГ 44 определить  не удается, отключения q-го ДО от коррекции орбиты не производится, т.к. нет управляющих воздействий на блок БФРМСГ 43 через блок БВРМСГ 45. Значение вектора
не удается, отключения q-го ДО от коррекции орбиты не производится, т.к. нет управляющих воздействий на блок БФРМСГ 43 через блок БВРМСГ 45. Значение вектора  транслируется в БВПДРСГ 46.
транслируется в БВПДРСГ 46.
В БВПДРСГ 46 производится выбор пары ДО для разгрузки СГ в соответствии с выражениями (14), (15). Исходная информация по значениям векторов  закладывается в БВПДРСГ 46 через второй его выход с четвертого выхода БЗПУКА 10. Номера j-x ДО выбранной пары выдаются с первого выхода БВПДРСГ 46 на выход БФУСМ 4.
закладывается в БВПДРСГ 46 через второй его выход с четвертого выхода БЗПУКА 10. Номера j-x ДО выбранной пары выдаются с первого выхода БВПДРСГ 46 на выход БФУСМ 4.
Команда на подключение q-го ДО к коррекции орбиты приходит на третий вход БФРМСГ 43. Одновременно эта же команда приходит на третий вход БВПДРСГ 46 и отключает от управления выбранную пару ДО. Указанная команда приходит на четвертый вод БФУСМ 4 с третьего выхода БСПОРЗВКМСГСВКМ 37, при этом она выполняет в конце разгрузки СГ одну из указанных операций на "подключение" или на "отключение".
Вторые выходы БВДКО 42 и БВПДРСГ 46 образуют третий выход БФУСМ 4, который соединен с третьим входом БПЗСВКМ 39. По указанному каналу в БПЗСВКМ 39 передается информация о номерах ДО, участвующих в управлении для определения  , см. (22). Таким образом, на выходе БФУСМ 4 получаем сформированный перечень ДО для включения, который может содержать:
, см. (22). Таким образом, на выходе БФУСМ 4 получаем сформированный перечень ДО для включения, который может содержать:
- номера ДО, участвующих в коррекции орбиты;
- номера ДО, участвующих в коррекции орбиты с исключенным q-m ДО;
- номера ДО, участвующих в коррекции орбиты с номерами ДО, образующих пары для разгрузки системы СГ.
Продолжительность включения каждого из ДО также определена.
Аналогично и в прототипе мы имеем на выходе такого же блока выбранные для управления номера ДО с заданными продолжительностями включения. Однако, как видно из описания прототипа данного блока, состав его в предлагаемом изобретении другой, хотя по функциональному назначению в системе управления они одинаковы. Это связано с тем, что в способе-прототипе и предлагаемом способе описаны разные принципы формирования управляющих сил и моментов.
Предлагаемые способ и система имеют следующие преимущества перед соответствующими им прототипами.
Заданную величину характеристической скорости коррекции при выбранном числе ДО удается реализовать за меньший промежуток времени. Это связано с тем, что результирующая сила от тяги первоначально выбранных двигателей имеет максимальную величину на интервале времени от их включения до насыщения системы СГ. Следовательно, импульс указанной силы будет иметь также максимальную величину. Если же проводить коррекцию орбиты только с использованием одних ДО, то величина импульса результирующей силы, действующей в заданном направлении, будет меньше на том же интервале. Это связано с тем, что для парирования возмущающего момента необходимо либо периодически отключать двигатели, участвующие в коррекции, либо уменьшать их тягу, либо включать "встречные" ДО.
После насыщения системы СГ один из ДО, участвующий в коррекции орбиты, отключается от управления. Однако указанное отключение длится лишь на интервале необходимой достаточности для разгрузки СГ, т.е. оно имеет минимально необходимую продолжительность.
Далее производится коррекция полным составом ДО с поддержанием ориентации системой СГ.
Указанный интервал можно также отработать с использованием одних только ДО. В том и другом случае на корпус КА будет действовать примерно один и тот же возмущающий момент, который в том и другом случае парируется за счет частичного отключения двигателей. Только в первом случае отключение будет непрерывным до конца разгрузки СГ. Далее указанное парирование будет осуществляться только системой СГ.
А во втором случае парирование будет осуществляться периодически на всем указанном времени за счет дробления силы тяги ДО.
Однако, исходя из интегральных оценок действующего возмущающего момента, примерно равного одной величине для рассмотренных случаев управления реактивными исполнительными органами, можно утверждать, что продолжительности отключения ДО от коррекции орбиты для парирования возмущений оставшимися двигателями будут примерно равны между собой.
Следовательно, импульс силы от тяг двигателей выбранного состава будет максимален в случае управления КА в соответствии с логикой управления предлагаемого способа. Поэтому на заданном интервале будет достигнуто и максимальное значение скорости коррекции КА или при заданном значении скорости коррекции она будет получена на меньшем интервале полетного времени.
Расхождения между требуемыми управляющими моментами и реальными меньше в предлагаемых изобретениях по сравнению с прототипами. Это прежде всего связано с тем, что силовые гироскопы превышают по своим техническим характеристикам ДО в плане точности выдачи управляющих моментов.
Кроме того, импульсный режим работы ДО способствует возникновению собственных колебаний корпуса КА, что может также приводить к дополнительным нерасчетным включениям ДО.
Предложенный в прототипе способ управления КА не является оптимальным для случая коррекции орбиты и поддержания ориентации в процессе коррекции с использованием опорного физического базиса. Как отмечалось раньше, это связано с тем, что в данном случае принцип линейной оптимизации не подходит для поиска решения. В описанном способе управления и системе его реализующей принцип линейной оптимизации не применяется. Однако по заявленным техническим показателям каждое из предложенных решений улучшает свой прототип. При этом выбор опорного базиса на достижение технического результата не имеет значения.
Литература
1. Воронков В.Н., Судаченко А.Л. Совмещение режимов ориентации и коррекции при управлении движением космического аппарата. - М.: Труды тринадцатых чтений К. Э. Циолковского, секция "Механика космического полета", 1979, с. 86-92.
2. Елисеев А.С. Техника космических полетов. - М.: Машиностроение, 1983.
3. Spacecraft attitude and velocity control system. US Patent N 5130931, Jul. 14, 1992.
4. Ковтун В.С. и др. Система управления ориентацией космического аппарат с силовыми гироскопами. Заявка N 5032611/22 (012690), патент RU 2006430 C1.
5. Ковтун В.С., Платонов В.Н. Способ управления КА с помощью реактивных исполнительных органов при выполнении режимов ориентации. Заявка N 4513881/40-22 от 3.05.89, патент RU 2066287 C1.
6. Раушенбах Б. В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974.
7. Техническое описание. ЩИ3.059.064-02 микро-ЭВМ "Электроника", 1990.
8. Петросян О.А. и др. Схемотехника БИС ПЗУ. - М.: Радио и связь, 1987.
9. Навигация, наведение и стабилизация в космосе. Под редакцией Дж.Э. Миллера. - М.: Машиностроение, 1970.
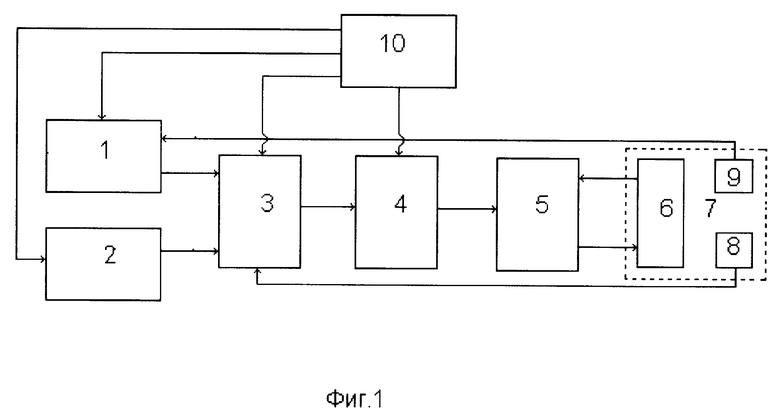
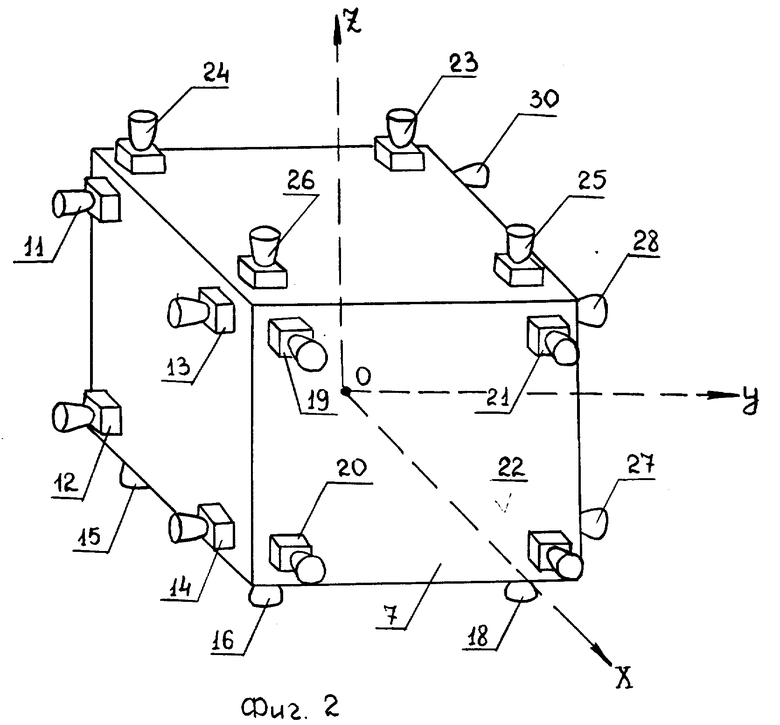

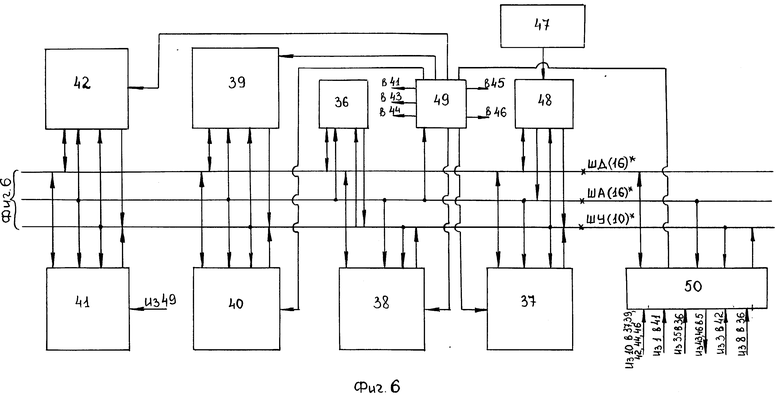
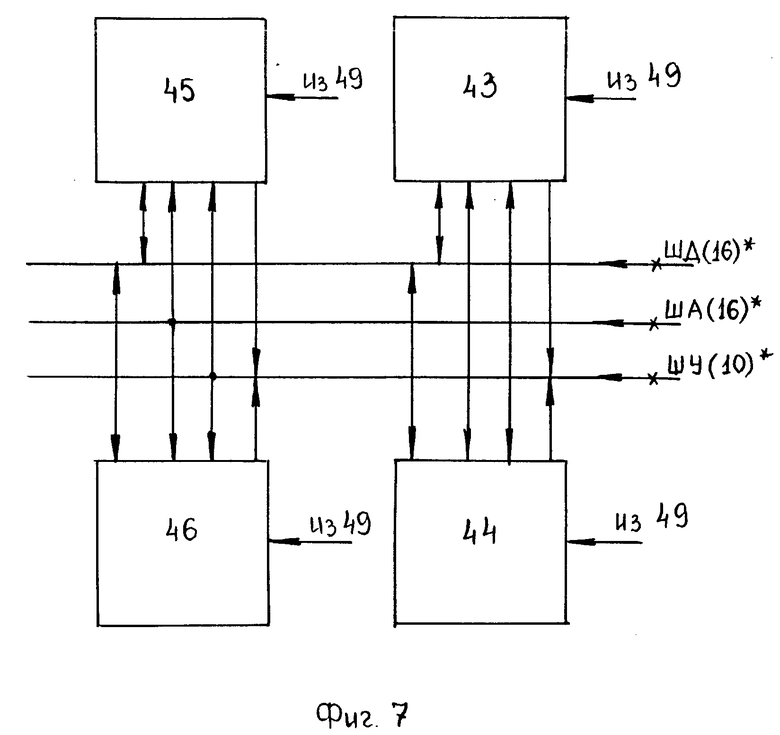
Изобретение относится к области управления ориентацией и движением центра масс космических аппаратов (КА) и направлено на получение максимального значения скорости коррекции орбиты КА с минимальными ошибками управления при одновременном применении реактивных двигателей ориентации (ДО) и силовых гироскопов (СГ). В предлагаемом способе определяют требуемое значение скорости коррекции орбиты КА и параметры его ориентации, формируют управляющие силы и моменты посредством ДО, поддерживая ориентацию КА с помощью СГ. При этом отслеживают и прогнозируют процесс насыщения СГ, проверяя условие принадлежности соответствующих значений кинетического момента в системе СГ области его располагаемых значений, по результатам чего определяют временную последовательность и векторы управляющих моментов разгрузки СГ, для создания которых либо отключают некоторые ДО, либо включают пару ДО, не участвующих в коррекции орбиты. Система управления КА содержит блоки определения текущих, прогнозируемых и располагаемых значений векторов кинетического момента, блоки сравнения этих значений и формирования параметров управления, в том числе - выбора ДО для коррекции орбиты и выбора пары ДО для разгрузки СГ. Оптимальным сочетанием ДО с СГ достигается максимальная скорость коррекции орбиты КА при минимальных ошибках управления. 2 с.п. ф-лы, 7 ил.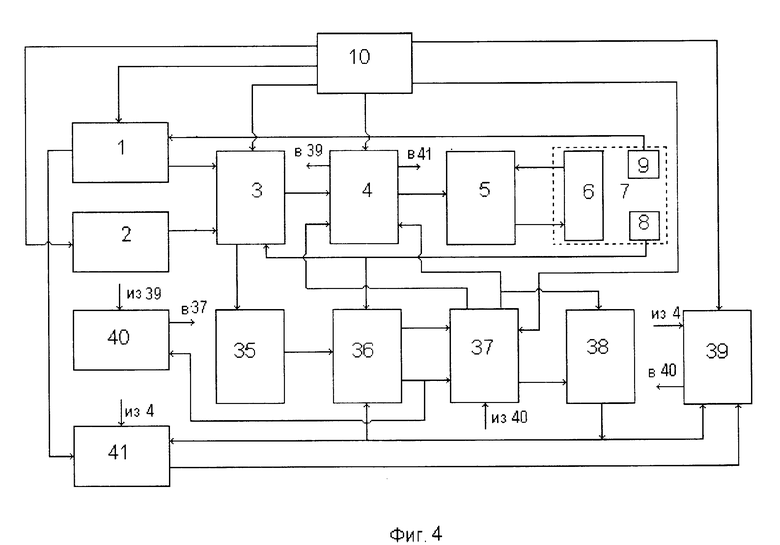
 в текущие моменты времени t, проверяют выполненные условия принадлежности значений
в текущие моменты времени t, проверяют выполненные условия принадлежности значений  области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы силовых гироскопов в момент времени ts определяют суммарные значения векторов управляющих моментов
области S располагаемых значений вектора кинетического момента в системе силовых гироскопов и в случае насыщения системы силовых гироскопов в момент времени ts определяют суммарные значения векторов управляющих моментов  от двигателей ориентации при условии поочередного отключения каждого q-го двигателя, где q = 1,2,..., n - номера двигателей ориентации, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых
от двигателей ориентации при условии поочередного отключения каждого q-го двигателя, где q = 1,2,..., n - номера двигателей ориентации, участвующих в коррекции орбиты, создают разгрузочный момент для системы силовых гироскопов двигателями ориентации, суммарный момент которых  имеет наибольшую проекцию на направление, противоположное вектору
имеет наибольшую проекцию на направление, противоположное вектору  при соответствующем отключенном двигателе ориентации, а в случае, когда управляющие моменты
при соответствующем отключенном двигателе ориентации, а в случае, когда управляющие моменты  не являются разгрузочными, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору
не являются разгрузочными, для разгрузки силовых гироскопов включают ту пару двигателей ориентации, не участвующих в коррекции орбиты, момент которой имеет наибольшую проекцию на направление, противоположное вектору  при этом никакой из указанных q-х двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента
при этом никакой из указанных q-х двигателей не отключают, в процессе проведения коррекции орбиты и разгрузки силовых гироскопов прогнозируют изменения указанного суммарного вектора кинетического момента  для случая коррекции орбиты, с учетом всех работающих указанных q-х двигателей на интервале от текущего момента времени разгрузки
для случая коррекции орбиты, с учетом всех работающих указанных q-х двигателей на интервале от текущего момента времени разгрузки  до расчетного момента времени окончания коррекции tkη, при этом полагают
до расчетного момента времени окончания коррекции tkη, при этом полагают
где Δt - продолжительность минимального импульса разгрузочного момента, причем
где Vu - величина, определяющая заданную скорость коррекции орбиты, текущее значение скорости коррекции орбиты на момент времени
текущее значение скорости коррекции орбиты на момент времени 
aΣ - расчетное значение ускорения космического аппарата от двигателей ориентации, участвующих в коррекции орбиты,
суммируют указанные спрогнозированные изменения вектора  с текущим значением суммарного вектора
с текущим значением суммарного вектора  определенным на момент начала прогноза
определенным на момент начала прогноза  проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно - условие непринадлежности
проверяют условие принадлежности полученных векторных сумм указанной области S и одновременно - условие непринадлежности  области S и если в момент времени
области S и если в момент времени  не выполняются оба эти условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного q-го двигателя к процессу коррекции орбиты или отключения указанной разгрузочной пары двигателей ориентации, после чего продолжают проверять выполнение условия принадлежности указанного вектора суммарного кинетического момента
не выполняются оба эти условия, продолжают проводить коррекцию орбиты с одновременной разгрузкой силовых гироскопов, а если выполняется хотя бы одно из указанных условий, прекращают разгрузку силовых гироскопов за счет подключения указанного отключенного q-го двигателя к процессу коррекции орбиты или отключения указанной разгрузочной пары двигателей ориентации, после чего продолжают проверять выполнение условия принадлежности указанного вектора суммарного кинетического момента  области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы силовых гироскопов при помощи двигателей ориентации, создающих указанный момент
области S вплоть до завершения коррекции и в случае невыполнения этого условия повторяют разгрузку системы силовых гироскопов при помощи двигателей ориентации, создающих указанный момент  или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
или при помощи разгрузочной пары двигателей ориентации, не участвующих в процессе коррекции орбиты.
