Изобретение относится к группе контрольно-измерительных приборов, а именно, является устройством для определения начальных геометрических несовершенств стенки магистральных трубопроводов (вмятин, трещин, овальностей и т.д.) и напряженно-деформированного состояния данных трубопроводов.
Известны внутритрубные дистанционно-управляемые рентгеновские устройства предназначенные для ведения неразрушающего контроля сварных швов в процессе сооружения трубопровода (Безопасность трубопроводных систем / И.И. Мазур, О.М. Иванцов. - М.: ИЦ «ЕЛИМА», 2004. - С.588-591). Принцип работы данных устройств основан на радиографии, когда пучек высокоэнергетического рентгеновского излучения проходит через сечение сварного шва и регистрируется на рентгеновской пленке, которой обматывают снаружи трубопровод. Данные устройства состоят из шасси, аккумуляторной батареи, рентгеновской трубки, электронного управляющего модуля и блока приема сигналов пульта.
Недостатком данных устройств является невозможность определения топологии поверхности стенки трубопровода.
Известны внутритрубные снаряды-профилемеры предназначенные для контроля геометрии поперечного сечения трубопровода, регистрации положения и размеров нарушений формы трубы (овальность, вмятины, гофры), фиксирования усиления сварных кольцевых швов трубопроводов. (Безопасность трубопроводных систем / И.И. Мазур, О.М. Иванцов. - М.: ИЦ «ЕЛИМА», 2004. - С.837-838). Устройство снаряда имеет шасси (рычаги с колесами), одометрическое устройство, систему определения. ориентации снаряда, устройство регистрации прохождения маркерных пунктов, систему регистрации углов поворотов, блок хранения информации. Снаряд имеет автономное электропитание и управляется программируемой микропроцессорной системой.
Недостатком снаряда-профилемера является его низкая чувствительность по отношению к различного рода дефектов стенки трубы, таких как точечная коррозия, внутренние расслоения, трещины и т.д.
Известны внутритрубные ультразвуковые снаряды-дефектоскопы предназначенные для выявления коррозионных и механических потерь металла на наружной и внутренней поверхности трубопровода, различного рода объемных несплошностей, а также расслоений в металле трубы (Безопасность трубопроводных систем / И.И. Мазур, О.М. Иванцов. - М.: ИЦ «ЕЛИМА», 2004. - С.839-842). Данные устройства содержат набор датчиков для излучения и приема ультразвуковых колебаний.
Недостатком данных устройств является невозможность их использования вне жидкой среды.
Известны внутритрубные магнитные снаряды-дефектоскопы предназначенные для контроля состояния металла, использующие принцип регистрации рассеяния магнитного потока (Безопасность трубопроводных систем / И.И. Мазур, О.М. Иванцов. - М.: ИЦ «ЕЛИМА», 2004. - С.842-848). Данные устройства содержат мощные магниты со стальными щетками, электромагнитные датчики, информационный блок.
Недостатком данных устройств является невысокая чувствительность к поверхностным дефектам глубиной менее 10% толщины стенки трубы и остаточное магнитное поле на трубопроводе, возникающее после обследования.
Известно устройство определения деформаций поверхности, содержащее проектор со слайдом изображения сетки, видеокамеру, устройство ввода-вывода информации в ЭВМ, саму ЭВМ с видеоконтроллером и дисплеем (патент 2065570, 6 G01N 21/00, опубл. 20.08.96, Бюл. 23. Кучерюк В.И., Попов A.M., Колесников А.В. Электронно-проекционный способ измерения формы и перемещений поверхности объекта).
Недостатками данного устройства являются его низкая степень автоматизации, низкая точность из-за использования устаревших технологий и связанная с этим трудоемкость определения топологии всей поверхности объекта.
Известно устройство для определения топологии поверхности муаровым методом, содержащее проектор, видеокамеру, мини-лазер, контроллер, который управляет данными устройствами посредством связи с ЭВМ через модем и программу на ЭВМ, позволяющую моделировать муаровый эффект (патент 2267087 G01N 11/25 опубл. 27.12.2005, Бюл. 36. Кучерюк В.И., Кузяков О.Н., Дубатовка У.В. Устройство для определения топологии поверхности муаровым методом).
Недостатком известного устройства является его неприспособленность к исследованию стенки магистральных трубопроводов.
Известное устройство является наиболее близким к заявляемому и принято за прототип.
Задачей, на решение которой направлено предлагаемое техническое решение, является дальнейшее развитие технологии определения топологии поверхности объекта и адаптация его к применению в исследовании геометрических несовершенств стенки магистральных трубопроводов.
Техническим результатом применения предлагаемого технического решения является повышение точности измерения геометрических несовершенств стенки исследуемых магистральных трубопроводов, определение остаточных напряжений, вызванных деформацией трубопровода под воздействием различных сил путем добавления площадки, на которой устройство закреплено, шагового электродвигателя, обеспечивающего поворот площадки с устройством вокруг своей оси, аккумуляторной батареи, обеспечивающей автономную работу устройства внутри трубопровода, платформы с электроприводом и колесами, обеспечивающих перемещение устройства вдоль исследуемого магистрального трубопровода, системы рычагов и колес, обеспечивающих устойчивое положение и защиту от механических повреждений внутри трубопровода, радиосвязи, обеспечивающей выполнение команд оператора, находящегося вне исследуемого магистрального трубопровода, спутниковой связи, обеспечивающей слежение за перемещением устройства внутри трубопровода.
Предлагаемое устройство полностью управляется командами оператора с помощью компьютера и компьютерной программой, способной обрабатывать картину муаровых полос с выдачей информации об остаточных деформациях и напряжениях в стенке трубы. Заявляемое устройство позволяет исследовать топологию поверхности стенки трубопровода с большей точностью по сравнению с устройством принятым за прототип, за счет непрерывного сканирования нужного участка стенки трубопровда, по заданной программе при различных внешних условиях и параметрах задания шагов мнимой и объектной сеток, расстояния от светотехники до плоскости и т.д., а также благодаря чувствительности метода и повышения его точности путем поворота эталонного растра в компьютерной программе.
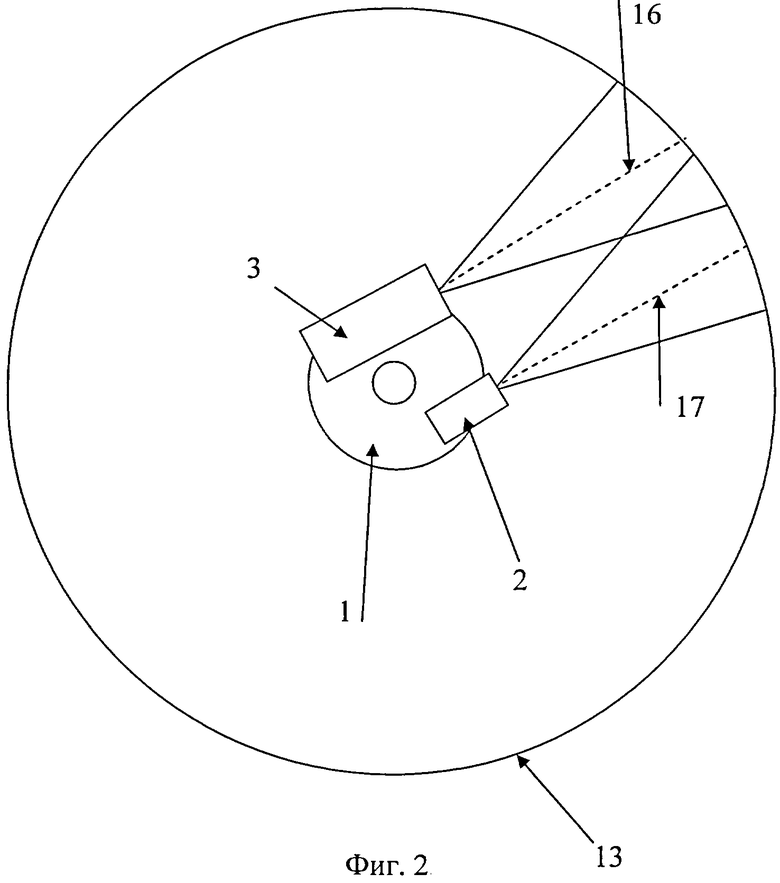
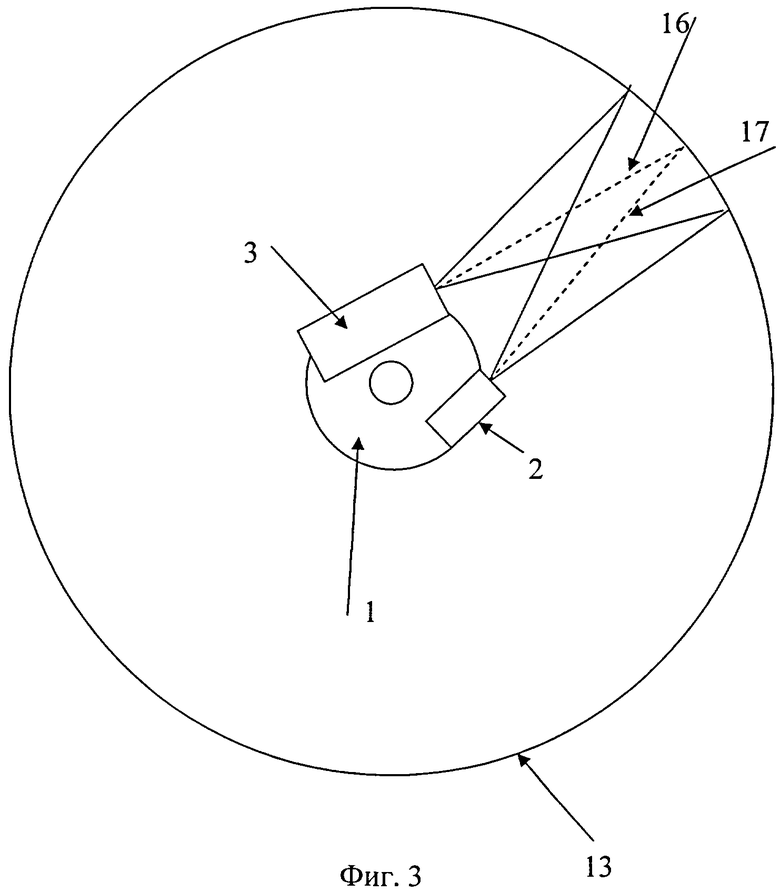
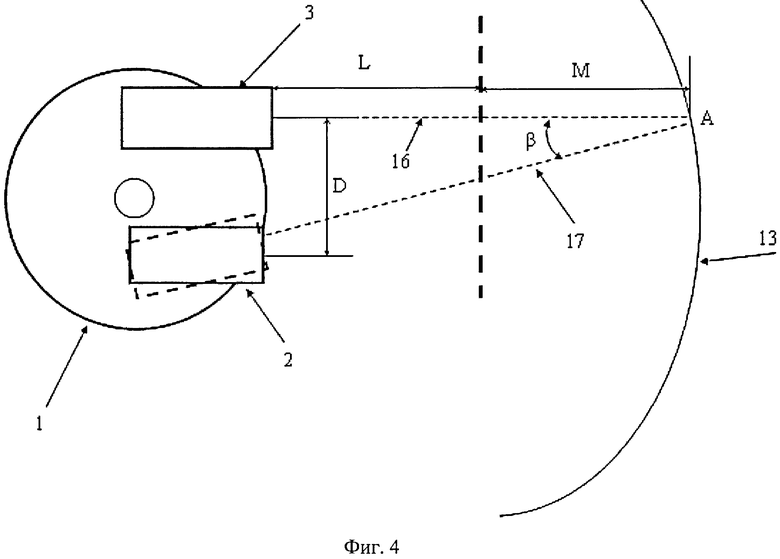
Общий вид устройства показан на фиг.1., на фиг.2. и фиг.3. показаны этапы процесса настройки устройства, на фиг.4. показана схема принципа работы устройства.
Устройство содержит площадку 1, в которую вмонтированы цифровая фотокамера 2 (далее фотокамера) и проектор 3. Данная площадка 1 соединена с шаговым электродвигателем 4, посредством которого площадка 1 способна вращаться вокруг своей оси. Шаговый электродвигатель 4 соединен с платформой 5, на которой расположена аккумуляторная батарея 6, обеспечивающая все элементы устройства электропитанием. Колеса 14 с электроприводом 15 позволяют совершать поступательные движения платформы 5 вдоль участка исследуемого магистрального трубопровода 13. Платформа 5 содержит систему рычагов и колес 7, обеспечивающих устойчивое положение устройства и предохраняющих от механических повреждений внутри исследуемого магистрального трубопровода 13. Фотокамера 2 может поворачиваться на определенный угол с помощью шагового электродвигателя 8. Управление всеми элементами данной установки осуществляется посредством радиоуправления через контроллер 9, встроенный в платформу 5, получающий сигналы от компьютера 10, находящегося вне исследуемого магистрального трубопровода 13. Датчик 12, вмонтированный в платформу 5, осуществляет взаимодействие компьютера 10 со спутниковой связью 11.
Исследование магистрального трубопровода 13 при помощи устройства производится следующим образом.
Устройство устанавливают внутрь исследуемого магистрального трубопровода 13:
а) не заполненного транспортным продуктом (нефтью, газом), являющегося участком магистральной трассы протяженностью от 0,01 км до 1 км, находящегося на этапе строительства (после этапов монтажа стальных труб в грунт (или на железобетонные опоры) и сварочных работ швов), не запущенного еще в эксплуатацию;
б) не заполненного транспортным продуктом (нефтью, газом), являющегося трубопроводом магистральной трассы на участке от одной запорной арматуры до другой, эксплуатация которого остановлена по причине проведения мероприятий по диагностике технического состояния.
После установки производят настройку устройства. Настройка заключается в том, что оптические оси 16 и 17 проектора 3 и фотокамеры 2 сводятся в одну точку А. Перед проведением настройки установки (фиг.2.) оптические оси 16 и 17 проектора 3 и фотокамеры 2 параллельны. Проектором 3 нормально к исследуемой внутренней поверхности стенки исследуемого магистрального трубопровода 13 проецируется изображение, в центре которого формируется сфокусированная светлая область. Затем посредством радиосвязи от компьютера 10 через контроллер 9 поступает сигнал шаговому электродвигателю 8 для совершения поворота на определенный угол фотокамеры 2. Фотокамера 2 поворачивается на угол β до тех пор, пока светлая область не окажется ровно по центру снимаемого фотокамерой 2 изображения (фиг.3.). После этого фотокамера 2 и проектор 3 фиксируются посредством остановки электродвигателя 8.
Образуемый прямоугольный треугольник (фиг.4.) с вершинами в оптических центрах 16 и 17 проектора 3, фотокамеры 2 и в точке А, имеет известный катет Д который является постоянной величиной установки. Тогда расстояние Н от проектора 3 до поверхности стенки исследуемого магистрального трубопровода 13 будет определено как
Н=L+M=DctgB,
где L - расстояние от проектора 3 до точки пересечения оптической оси проектора 3 и середины темной линии сетки, м; М - расстояние от точки пересечения оптической оси проектора 3 и середины темной линии сетки до стенки трубопровода 13, м; D - расстояние между оптическими осями проектора 3 и фотокамеры 2, м; β - угол поворота фотокамеры 2.
При этом угол β, заносимый в компьютер 10 после окончания настройки устройства, будет точно соответствовать числу импульсов, формируемых в компьютере 10 для управления шаговым электродвигателем 8, обеспечивающего поворот фотокамеры 2. Это позволит определить при помощи компьютера 10 угол поворота β фотокамеры 2 и расстояние Н до стенки исследуемого магистрального трубопровода 13.
Далее производится проецирование проектором 3 сформированного в компьютере 10 изображения эталонной сетки, состоящей из чередующихся темных и светлых линий с заданным шагом на поверхность стенки исследуемого магистрального трубопровода 13. Параметры сетки задаются в компьютере 10 и передаются посредством радиосвязи на контроллер 9, а затем на проектор 3. Параметры сетки могут быть программно изменены, что повышает быстроту ее выбора.
Далее производится прием при помощи фотокамеры 2 объектного растра. Фотокамера 2 осуществляет прием объектного растра и передает его в цифровом формате на компьютер 10.
В компьютере 10, по заданной формуле формируется картина муаровых полос, образованных при наложении светлых и темных линий «объектного» и «мнимого» растров, вычисляются центры полос, расстояния от них до стенки исследуемого магистрального трубопровода 13 и величины деформаций поверхности стенки исследуемого магистрального трубопровода 13. При этом для полученных двух соседних муаровых полос изменение расстояния от плоскости «мнимого растра» до исследуемой поверхности определяется по формуле:
 ,
,
где a - шаг линий проектируемой на поверхность на поверхность сетки, m - масштаб проекции сетки в плоскости «мнимого растра», ψ1 и ψ2 - углы освещения и наблюдения «мнимого растра» соответственно.
После получения величин деформации поверхности исследуемого участка внутренней стенки исследуемого магистрального трубопровода 13 площадка 1 совершает поворот вокруг своей оси посредством шагового электродвигателя 4 с шагом, заданным по программе компьютера 10, для исследования другого участка внутренней стенки исследуемого магистрального трубопровода 13. Команда для совершения поворота площадки 1 посредством радиосвязи поступает от компьютера 10 через контроллер 9, который подает сигнал шаговому электродвигателю 4, вращающий площадку 1 на определенный угол. После поворота площадки 1 проводится настройка устройства, проецирование на участок эталонной сетки, прием фотокамерой 2 «рабочего растра», вычисляются центры полос, расстояния от них до стенки исследуемого магистрального трубопровода 13 и величины деформаций поверхности стенки исследуемого магистрального трубопровода 13. Затем вновь происходит поворот площадки 1 для исследования другого участка стенки исследуемого магистрального трубопровода 13. После того как площадка 1 совершит полный поворот вокруг своей оси и вернется в изначальное положение, компьютер 10 посредством радиосвязи даст команду контроллеру 9, который подаст сигнал электроприводу 15 и платформа 5 начнет движении вдоль исследуемого магистрального трубопровода 13 с определенным шагом, заданным программой компьютера 10. Во время движения платформы 5 внутри трубопровода система рычагов и колес 7 придает платформе 5 устойчивое положение равновесия и предотвращает устройство от механических повреждений.
Далее вновь производится настройка устройства, проецирование на не исследуемый участок внутренней стенки исследуемого магистрального трубопровода 13 эталонной сетки и т.д. Процесс переориентации платформы 5 вдоль исследуемого магистрального трубопровода 13 будет продолжаться до тех пор, пока полностью трубопровод 13 не будет обследован.
Управление элементами устройства и платформы 5 осуществляется оператором, находящегося вне исследуемого магистрального трубопровода 13, на компьютере 10 по компьютерной программе через радиосвязь посредством контроллера 9, установленного на платформу 5, передвижение устройства и платформы 5 внутри исследуемого магистрального трубопровода 13 отслеживается на компьютере 10 посредством спутниковой связи 11 в онлайн режиме.
В итоге такого непрерывного исследования всей внутренней поверхности стенки исследуемого магистрального трубопровода 13, на компьютере 10 формируется суммарная картина топологии ее поверхности. Анализируя полученную картину топологии поверхности стенки исследуемого магистрального трубопровода 13, можно определить ее геометрические несовершенства (сколы, вмятины, овальности и т.д.) и напряженно-деформированное состояние стенки исследуемого магистрального трубопровода 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ГЕОМЕТРИЧЕСКИХ НЕСОВЕРШЕНСТВ РЕЗЕРВУАРОВ МУАРОВЫМ МЕТОДОМ | 2011 |
|
RU2454627C1 |
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ГЕОМЕТРИЧЕСКИХ НЕСОВЕРШЕНСТВ РЕЗЕРВУАРОВ МУАРОВЫМ МЕТОДОМ С ДВУМЯ ОПОРАМИ | 2012 |
|
RU2528122C2 |
| ГРАФО-ПРОЕКЦИОННЫЙ МУАРОВЫЙ СПОСОБ ИЗМЕРЕНИЯ | 2014 |
|
RU2583852C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ПОЗВОНОЧНИКА ЧЕЛОВЕКА, ОСНОВАННОЕ НА ТЕНЕВОМ МУАРОВОМ МЕТОДЕ | 2013 |
|
RU2531457C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА | 2001 |
|
RU2216710C2 |
| ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2065570C1 |
| Устройство для измерения деформаций тонкостенных цилиндрических оболочек | 1975 |
|
SU567945A1 |
| ВНУТРИТРУБНЫЙ АВТОНОМНЫЙ ДЕФЕКТОСКОП-СНАРЯД "ОПТОСКАН" | 2013 |
|
RU2529611C1 |
| РЕНТГЕНОГРАФИЧЕСКИЙ КРОУЛЕР | 2012 |
|
RU2482375C1 |
Изобретение может быть использовано для определения геометрических несовершенств стенки магистральных трубопроводов (вмятин, трещин, овальностей и т.д.) и напряженно-деформированного состояния трубопроводов. Устройство содержит фотокамеру, проектор и компьютер, соединенные между собой контроллером, установленным на платформу. Фотокамера и проектор установлены на площадке, имеющей возможность вращаться посредством шагового электродвигателя, связанного с контроллером. Фотокамера способна совершать вращательные движения за счет шагового электродвигателя, установленного на площадку и связанного с контроллером. Площадка соединена с платформой, имеющей возможность совершать поступательные движения внутри трубопровода посредством электропривода с колесами, связанного с контроллером. Устойчивость положения и защиту от механических повреждений обеспечивает система рычагов и колес, присоединенных к платформе, электропитание и автономность работы обеспечивает аккумуляторная батарея, установленная на платформу. Управление движением осуществляется посредством радиоуправления через контроллер, получающий сигналы от компьютера, находящегося вне трубопровода. Технический результат - повышение точности измерения геометрических несовершенств стенки магистральных трубопроводов. 4 ил.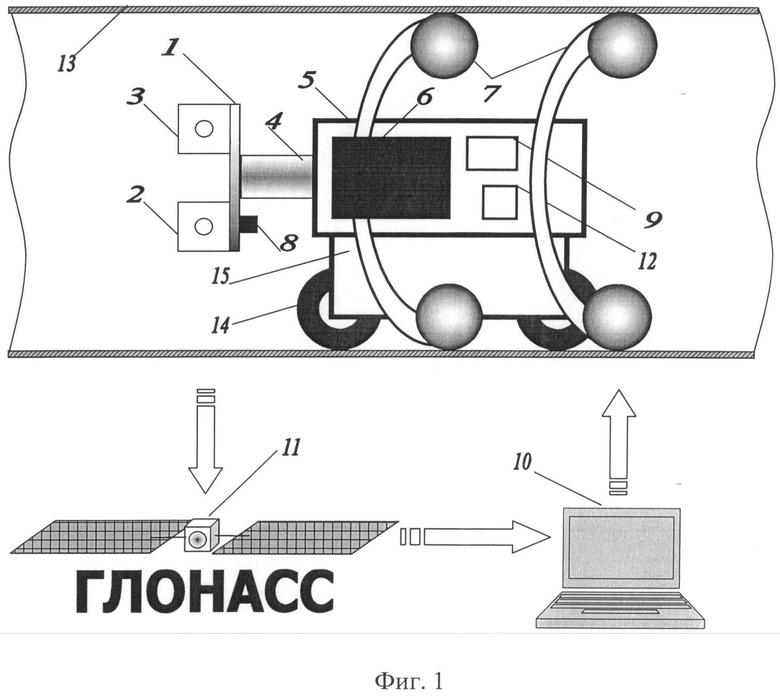
Устройство для определения топологии поверхности, содержащее фотокамеру, проектор и компьютер, соединенные между собой контроллером, обеспечивающим управление устройством, отличающееся тем, что фотокамера и проектор установлены на площадке, которая имеет возможность совершать вращательные движения посредством шагового электродвигателя, связанного с контроллером, установленным на платформу, фотокамера способна совершать вращательные движения за счет шагового электродвигателя, установленного на указанную площадку и связанного с контроллером, площадка соединена с указанной платформой, которая имеет возможность совершать поступательные движения внутри трубопровода посредством электропривода с колесами, который связан с контроллером, устойчивость положения и защиту от механических повреждений обеспечивает система рычагов и колес, присоединенных к данной платформе, электропитание и автономность работы всех элементов устройства и платформы обеспечивает аккумуляторная батарея, установленная на данную платформу.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| JP 2001324683 A, 22.11.2001 | |||
| WO 2010131698 A1, 18.11.2010 | |||
| Приспособление для автоматической проверки и расплавления спирального тела накала, монтированного на ножке электрической лампы | 1936 |
|
SU52204A1 |
| JP 5149884 A, 15.06.1993. | |||

