Изобретение относится к группе контрольно-измерительных приборов, а именно, является устройством для определения начальных геометрических несовершенств стенки цилиндрических резервуаров (вмятин, трещин, овальностей и т.д.).
Известен метод измерения геометрических несовершенств резервуаров вручную с использованием различных измерительных устройств (Кузяков О.Н., Кучерюк В.И. Методы и средства измерения типологии поверхности, перемещений и деформаций. - Тюмень: ТюмГНГУ, 2002. - 172 с.). Метод получил широкое использование в дефектоскопии благодаря тому, что он позволяет довольно точно определить местонахождение и размеры дефектов. Главными недостатками данного метода являются его трудоемкость и соответственно большие потери времени и существенные денежные затраты при обследовании больших объектов.
Известен метод создания моделей резервуаров с дефектами по подобию настоящих (Тюрин Д.В. Моделирование вертикальных стальных резервуаров с несовершенствами геометрической формы. - Тюмень: ТюмГНГУ, 2003. - 175 с.). Преимуществом данного метода является существенное снижение стоимости обследования объектов. Недостатками метода являются довольно трудоемкое изготовление точной модели резервуара и выбор подходящего материала для ее изготовления, а также связанная с этим невысокая точность определения геометрических несовершенств резервуара.
Известен метод использования муарового эффекта для измерения геометрических несовершенств резервуаров, а также несколько устройств, работа которых основана на использовании данного метода.
Известно устройство определения деформаций поверхности, содержащее проектор со слайдом изображения сетки, видеокамеру, устройство ввода-вывода информации в ЭВМ, саму ЭВМ с видеоконтроллером и дисплеем (патент 2065570, 6 G01N 21/00, опубл. 20.08.96, Бюл. 23.Кучерюк В.И., Попов A.M., Колесников А.В. Электронно-проекционный способ измерения формы и перемещений поверхности объекта.).
Недостатками данного устройства являются его низкая степень автоматизации, низкая точность из-за использования устаревших технологий и связанная с этим трудоемкость определения топологии всей поверхности объекта.
Известно устройство для определения топологии поверхности муаровым методом, содержащее проектор, видеокамеру, мини-лазер, контроллер, управляющий данными устройствами посредством связи с ЭВМ через модем и программу на ЭВМ, позволяющую моделировать муаровый эффект (патент 2267087, G01В 11/25, опубл. 27.12.2005, Бюл. 36. Кучерюк В.И., Кузяков О.Н., Дубатовка У.В. Устройство для определения топологии поверхности муаровым методом.).
Недостатком данного устройства является его неприспособленность к исследованиям резервуаров.
Данное устройство является наиболее близким к заявляемому и принято за прототип.
Задачей, на решение которой направлено предлагаемое техническое решение, является дальнейшее развитие технологии определения топологии поверхности объекта и адаптация его к применению в исследовании геометрических несовершенств цилиндрических резервуаров.
Техническим результатом применения предлагаемого технического решения является повышение точности измерения геометрических несовершенств цилиндрических резервуаров путем добавления механизма, обеспечивающего подъем-опускание устройства на нужную высоту, а также его поворот посредством шаговых электродвигателей.
Указанный технический результат достигается тем, что устройство содержит проектор, фотокамеру и компьютер с модемной линией, соединенные между собой контроллером, обеспечивающим управление устройством, при этом проектор и фотокамера установлены на площадке, а указанная площадка имеет возможность осуществления вращательного и поступательного движения посредством шаговых электродвигателей, связанных с контроллером.
Предлагаемое устройство позволяет исследовать при помощи компьютера топологию поверхности стенки резервуара с большей точностью по сравнению с устройством, принятым за прототип, за счет непрерывного сканирования нужного участка стенки, по заданной программе при различных внешних условиях и параметрах задания шагов мнимой и объектной сеток, расстояния от видеосистемы до плоскости и т.д., а также благодаря чувствительности метода и повышению его точности путем поворота эталонного растра в компьютерной программе.
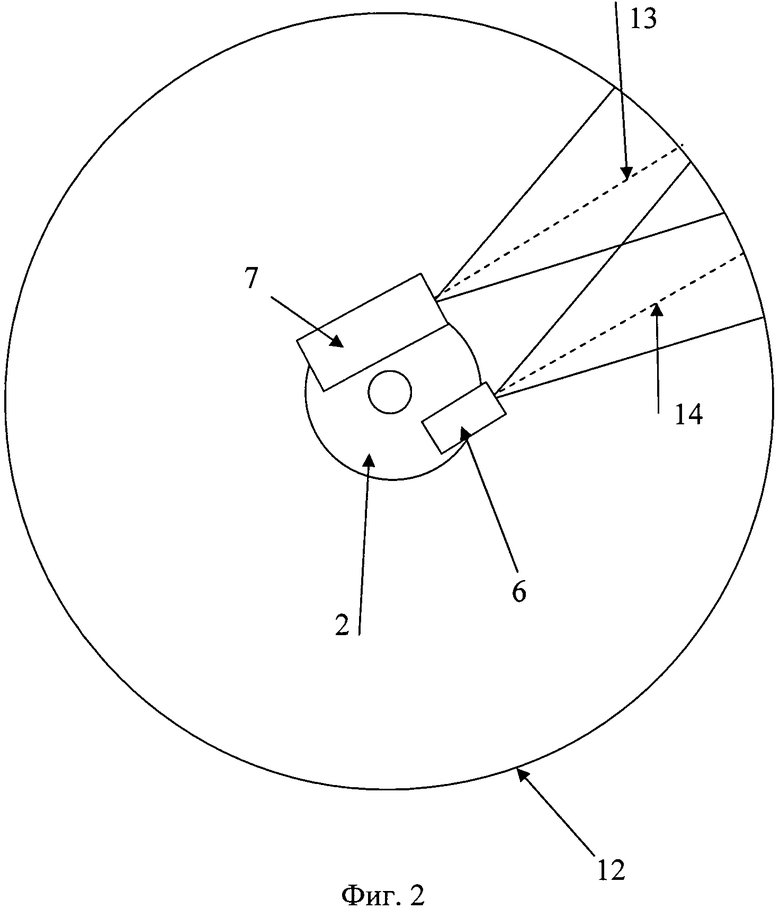
Общий вид устройства показан на фиг.1, на фиг.2 и фиг.3 показаны этапы процесса настройки устройства (юстировки), на фиг.4 показана схема принципа работы устройства.
Устройство содержит механизм подъема-опускания и поворота платформы, в который входит труба 1 с прикрепленной к ней подвижной площадкой 2. На площадку 2 установлены фотокамера 6 и проектор 7. Поворот площадки 2 осуществляется посредством шагового электродвигателя 4. Подъем-опускание площадки 2 осуществляется посредством шагового электродвигателя 5. Поворот фотокамеры 6, для осуществления настройки устройства, производится при помощи шагового электродвигателя 3. Обеспечение электричеством фотокамеры 6, проектора 7, электродвигателя для поворота фотокамеры 3, электродвигателя для поворота площадки 4, электродвигателя 5 для подъема-опускания площадки 2 осуществляется посредством силового кабеля 8, проложенного внутри трубы 1. Управление шаговыми электродвигателями 3, 4, 5, проектором 7 и фотокамерой 6 осуществляется посредством контроллера 9, получающего сигналы через модемную линию связи 10 от компьютера 11.
Обследование резервуара при помощи устройства проводится следующим образом.
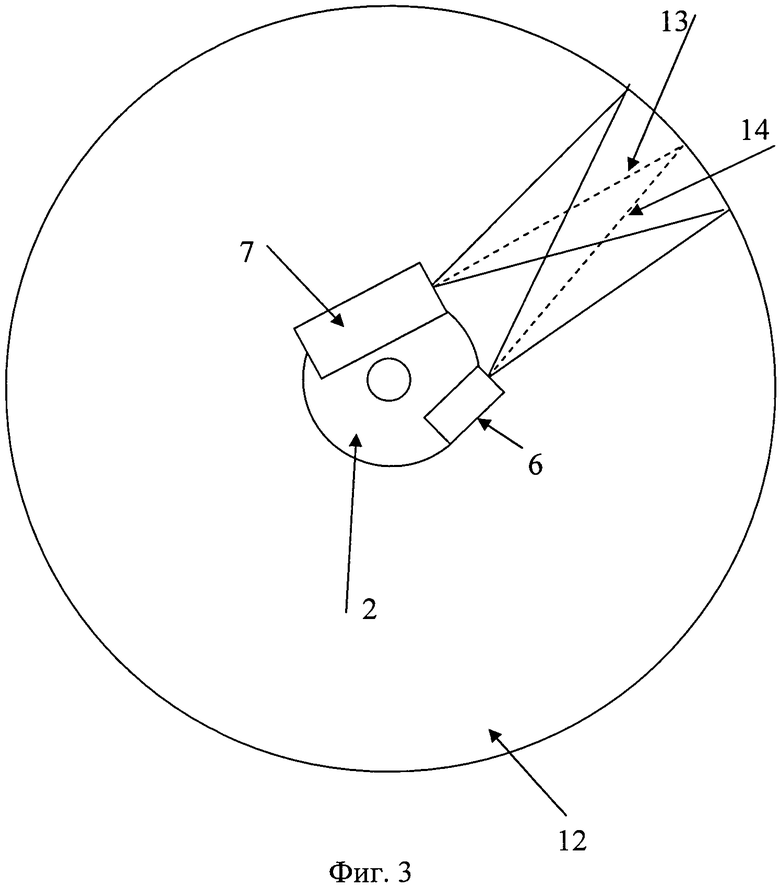
Устройство устанавливают в резервуар 12, затем производят его юстировку. Юстировка заключается в том, что оптические оси 13 и 14 проектора 7 и фотокамеры 6 сводятся в одну точку. Перед проведением юстировки (фиг.2) оптические оси 13 и 14 проектора 7 и фотокамеры 6 параллельны. Проектором 7 нормально к исследуемой поверхности резервуара 12 проецируется изображение, в центре которого формируется сфокусированная светлая область. Затем, по сигналу компьютера 11, шаговый электродвигатель 3 поворачивает фотокамеру 6 на угол β до тех пор, пока светлая область не окажется ровно по центру изображения, снимаемого фотокамерой 6 (фиг.3). После этого фотокамера 6 фиксируется посредством остановки шагового электродвигателя 3.
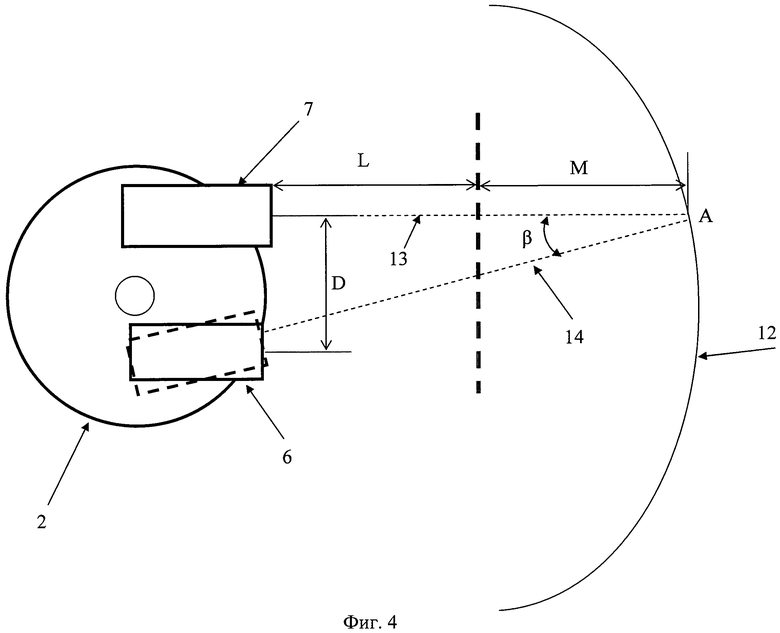
Образуемый прямоугольный треугольник (фиг.4) с вершинами в оптических центрах 13 и 14 проектора 7 и фотокамеры 6 в точке А имеет известный катет D, который является постоянной величиной установки.
Тогда расстояние H от проектора 7 до поверхности стенки резервуара 12 будет определено как:
Н=L+M=Dctgβ,
где L - расстояние от проектора 7 до точки пересечения оптической оси 13 проектора 7 и середины темной линии сетки, м; M - расстояние от точки пересечения оптической оси 13 проектора 7 и середины темной линии сетки до стенки резервуара, м; D - расстояние между оптическими осями 13 и 14 проектора 7 и фотокамеры 6, м; β - угол поворота фотокамеры 6.
При этом угол β, заносимый в компьютер 11 после окончания юстировки, будет точно соответствовать числу импульсов, формируемых в компьютере 11 для управления шаговым электродвигателем 3, обеспечивающим поворот фотокамеры 6. Это позволит определить при помощи компьютера 11 угол поворота β фотокамеры 6 и расстояние Н до стенки резервуара 12.
Далее осуществляется проецирование проектором 7 сформированного в компьютере 11 изображения эталонной сетки, состоящей из чередующихся темных и светлых линий с заданным шагом на поверхность стенки резервуара 12. Параметры сетки задаются в компьютере 11 и передаются при помощи модемной линии 10 на контроллер 9, а затем на проектор 7. Параметры сетки могут быть программно изменены, что повышает быстроту ее выбора.
Затем ведется прием при помощи фотокамеры 6 объектного растра. Фотокамера 6 осуществляет прием объектного растра и передает его в цифровом формате на компьютер 11. В компьютере 11, по заданной формуле, формируется картина муаровых полос, образованных при наложении светлых и темных линий «объектного» и «мнимого» растров, вычисляются центры полос, расстояния от них до стенки резервуара 12 и величины деформаций поверхности стенки резервуара 12. При этом для полученных двух соседних муаровых полос изменение расстояния от плоскости «мнимого растра» до исследуемой поверхности определяется по формуле:
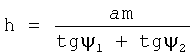
где а - шаг линий проектируемой на поверхность сетки, m - масштаб проекции сетки в плоскости «мнимого растра», ψ1 и ψ2 - углы освещения и наблюдения «мнимого растра» соответственно.
Далее происходит переориентация системы на другой участок стенки резервуара 12. Сигналы для переориентации поступают на контроллер 9 с компьютера 11, и тот подает сигнал шаговым электродвигателям 3, 4, 5, которые начинают вращать, поднимать, опускать площадку 2 с проектором 7 и фотокамерой 6 таким образом, что переориентируют устройство на другой участок стенки резервуара 12. Далее проводится юстировка, проецирование на участок эталонной сетки, прием фотокамерой 6 «рабочего растра» и вновь переориентирование системы. Эти процессы будут повторяться до тех пор, пока не будет изучена вся поверхность исследуемого резервуара 12.
В итоге, после обследования всей поверхности резервуара 12 на компьютере 11 формируется суммарная картина топологии поверхности стенки резервуара 12, анализируя которую можно определить его геометрические несовершенства (сколы, вмятины, овальности и т.д.).
Изобретение относится к группе контрольно-измерительных приборов, а именно, является устройством для определения начальных геометрических несовершенств стенки цилиндрических резервуаров (вмятин, трещин, овальностей и т.д.). Техническим результатом является повышение точности измерения геометрических несовершенств цилиндрических резервуаров путем добавления механизма, обеспечивающего подъем-опускание и поворот платформы, в который входит труба с прикрепленной к ней подвижной площадкой. На площадке установлены фотокамера и проектор. Поворот площадки осуществляется посредством шагового электродвигателя. Подъем-опускание площадки осуществляется посредством шагового электродвигателя. Поворот фотокамеры для осуществления настройки устройства производится при помощи шагового электродвигателя. Обеспечение электричеством фотокамеры, проектора, электродвигателя для поворота фотокамеры, электродвигателя для поворота площадки, электродвигателя для подъема-опускания площадки осуществляется посредством силового кабеля, проложенного внутри трубы. Управление шаговыми электродвигателями, проектором и фотокамерой осуществляется посредством контроллера, получающего сигналы через модемную линию связи от компьютера. 4 ил.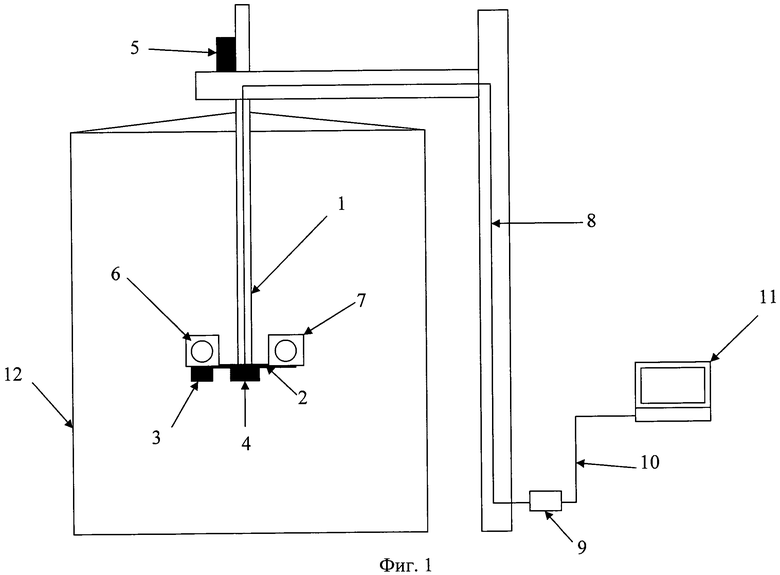
Устройство для определения топологии поверхности, содержащее проектор, фотокамеру и компьютер с модемной линией, соединенных между собой контроллером, обеспечивающим управление устройством, отличающееся тем, что проектор и фотокамера установлены на площадке, при этом указанная площадка имеет возможность осуществления вращательного и поступательного движения посредством шаговых электродвигателей, связанных с контроллером.
| Кузяков О.Н | |||
| Разработка методов и средств автоматизированного контроля перемещений, деформаций и скорости внутренней коррозии при эксплуатации объектов транспорта и хранения жидких углеводородов | |||
| Автореферат диссертации на соискание ученой степени кандидата технических наук | |||
| - М., 2003, 37 с | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| Устройство для синхронизации | 1932 |
|
SU32604A1 |
| Устройство для измерения деформаций тонкостенных цилиндрических оболочек | 1975 |
|
SU567945A1 |
| US 4185918 A1, 29.01.1980 | |||
| US 2002176608 A1, 28.11.2002. | |||

