Изобретение относится к группе контрольно-измерительных приборов, а именно к средствам для определения начальных геометрических несовершенств стенки цилиндрических резервуаров (вмятин, трещин, овальностей и т.д.).
Известно устройство определения деформаций поверхности, содержащее проектор со слайдом изображения сетки, видеокамеру, устройство ввода-вывода информации в ЭВМ, саму ЭВМ с видеоконтроллером и дисплеем [патент 2065570 РФ, МПК 6 G01N 21/00, опубл. 20.08.96].
Недостатками известного устройства являются его низкая степень автоматизации, низкая точность из-за использования устаревших технологий и связанная с этим трудоемкость определения топологии всей поверхности объекта.
Известно устройство для определения топологии поверхности муаровым методом, содержащее проектор, видеокамеру, мини-лазер, контроллер, управляющий данными устройствами посредством связи с ЭВМ через модем и программу на ЭВМ, позволяющую моделировать муаровый эффект [патент 2267087 РФ, МПК 8 G01B 11/25, опубл. 27.12.2005].
Однако при помощи этого устройства невозможно провести требуемые исследования резервуаров.
Известно устройство для изучения геометрических несовершенств резервуаров муаровым методом, содержащее проектор и фотокамеру, установленные на площадке, имеющей возможность осуществления вращательного и поступательного движения посредством шаговых электродвигателей, связанных с контроллером, управляющим данными устройствами посредством связи с ЭВМ через модем и программу на ЭВМ, позволяющую моделировать муаровый эффект [патент 2267087 РФ, МПК G01B 11/25 (2006.01), опубл. 27.06.2012].
Недостатком данного устройства является большая вероятность появления искажений картины муаровых полос, получаемой при фотографировании стенки резервуара, связанная с воздействием на установку различных внешних нагрузок.
Известное устройство является наиболее близким к заявляемому и принято за прототип.
Задачей, на решение которой направлено предлагаемое техническое решение, является минимизация последствий воздействия внешних нагрузок на устройство.
Техническим результатом применения предлагаемого технического решения является повышение точности измерения геометрических несовершенств цилиндрических резервуаров путем добавления дополнительной опоры к механизму, обеспечивающему подъем-опускание устройства на нужную высоту, а также его поворот посредством шаговых электродвигателей.
Указанный технический результат достигается тем, что в устройстве для определения топологии поверхности, содержащем проектор и фотокамеру, установленные на площадке, при этом фотокамера установлена с возможностью поворота посредством шагового электродвигателя, установленного на площадке, которая прикреплена к трубе с возможностью осуществления поворота и подъема-опускания посредством шаговых электродвигателей, и компьютер с модемной линией, соединенных между собой контроллером, обеспечивающим управление устройством, особенностью является то, что указанная труба снабжена верхним и нижним фиксаторами, при этом электродвигатель поворота площадки расположен в нижнем фиксаторе, а электродвигатель подъема-опускания площадки установлен на указанной трубе.
Предлагаемое устройство позволяет исследовать при помощи компьютера топологию поверхности стенки резервуара с большей точностью по сравнению с устройством, принятым за прототип, за счет практически полного отсутствия вибраций, вызванных внешними нагрузками, так как устройство надежно закрепляется в двух точках фиксаторами.
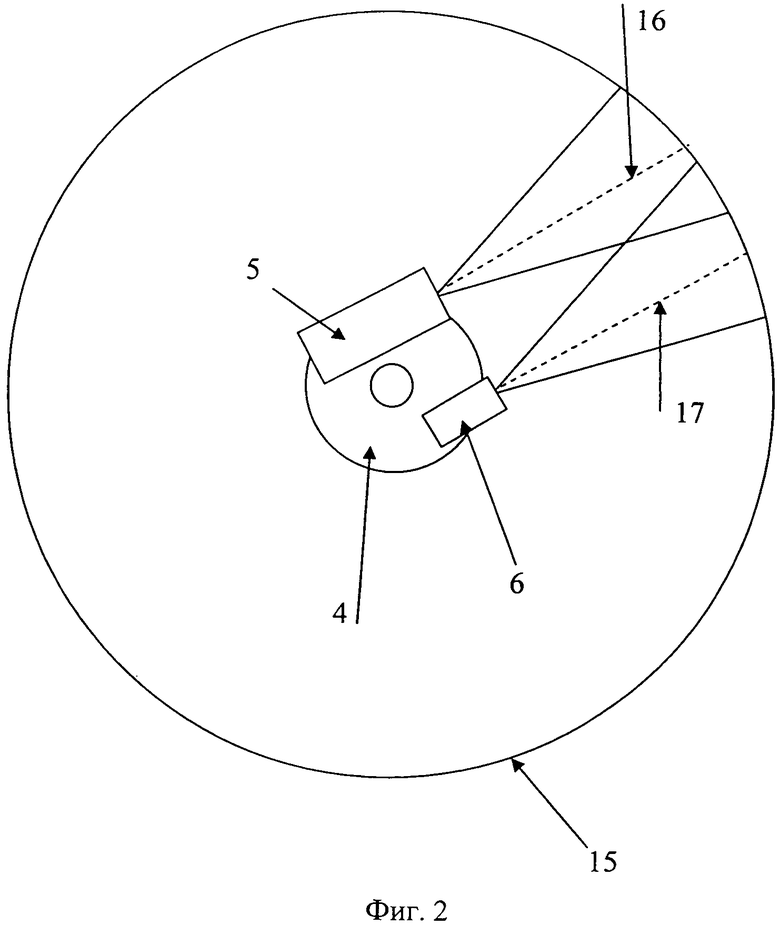
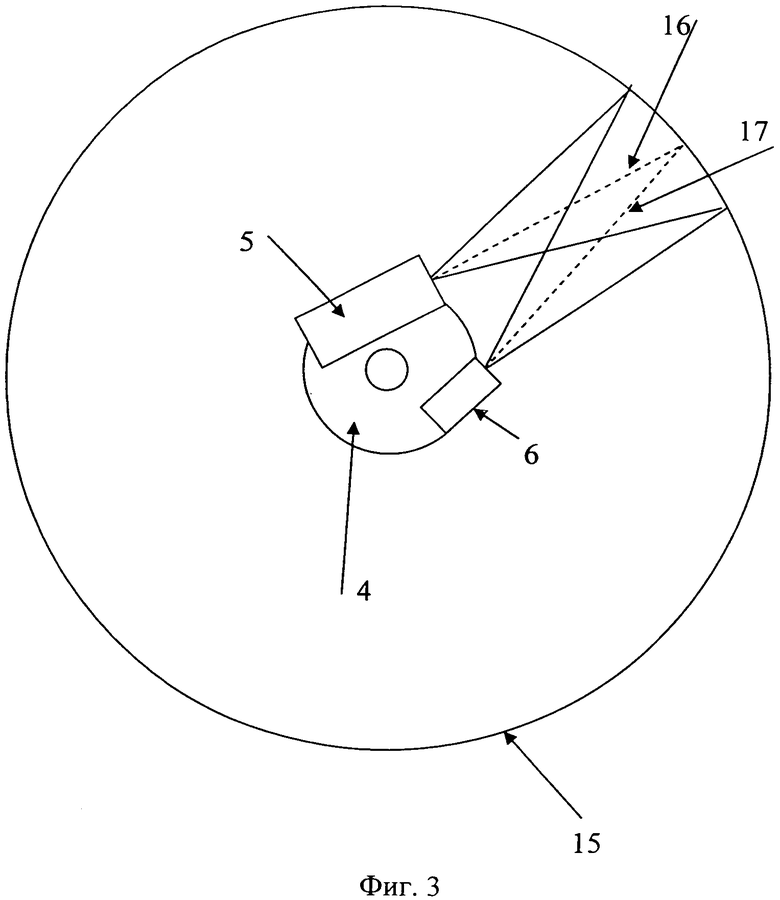
Общий вид устройства показан на фиг.1, на фиг.2 и фиг.3 показаны этапы процесса настройки устройства (юстировки).
Устройство содержит механизм подъема-опускания и поворота платформы, в который входят верхний 1 и нижний фиксаторы 2 и труба 3 с прикрепленной к ней подвижной площадкой 4. На площадке 4 установлены проектор 5 и фотокамера 6. Поворот площадки 4 осуществляется посредством шагового электродвигателя 9, закрепленного внутри нижнего фиксатора 2 трубы 3. Подъем-опускание площадки 4 осуществляется посредством шагового электродвигателя 8, закрепленного на трубе 3, и ленточного, тросового или цепного механизма 10, расположенного вдоль трубы 3. Поворот фотокамеры 6 для осуществления настройки устройства производится при помощи шагового электродвигателя 7, расположенного на площадке 4. Обеспечение электричеством фотокамеры 6, проектора 5, электродвигателя 7 для поворота фотокамеры 6, электродвигателя 9 для поворота площадки 4, электродвигателя 8 для подъема-опускания площадки 4 осуществляется посредством силового кабеля 11, проложенного внутри трубы 3. Управление шаговыми электродвигателями 7, 8, 9, проектором 5 и фотокамерой 6 осуществляется посредством контроллера 12, получающего сигналы через модемную линию связи 13 от компьютера 14.
Обследование резервуара при помощи устройства проводится следующим образом.
Устройство устанавливают в резервуар 15, затем производят его юстировку. Юстировка заключается в том, что оптические оси 16 и 17 проектора 5 и фотокамеры 6 сводятся в одну точку. Перед проведением юстировки (фиг.2.) оптические оси 16 и 17 проектора 5 и фотокамеры 6 параллельны. Проектором 5 нормально к исследуемой поверхности резервуара 15 проецируется изображение, в центре которого формируется сфокусированная светлая область. Затем по сигналу компьютера 14 шаговый электродвигатель 7 поворачивает фотокамеру 6 до тех пор, пока светлая область не окажется ровно по центру изображения, снимаемого фотокамерой 6. После этого фотокамера 6 фиксируется посредством остановки шагового электродвигателя 7.
Далее осуществляется проецирование проектором 5 сформированного в компьютере 14 изображения эталонной сетки, состоящей из чередующихся темных и светлых линий с заданным шагом на поверхность стенки резервуара 15. Параметры сетки задаются в компьютере 14 и передаются при помощи модемной линии 13 на контроллер 12, а затем на проектор 5. Параметры сетки могут быть программно изменены, что повышает быстроту ее выбора.
Затем ведется прием при помощи фотокамеры 6 объектного растра. Фотокамера 6 осуществляет прием объектного растра и передает его в цифровом формате на компьютер 14. В компьютере 14 по заданной формуле формируется картина муаровых полос, образованных при наложении светлых и темных линий «объектного» и «мнимого» растров, вычисляются центры полос, расстояния от них до стенки резервуара 15 и величины деформаций поверхности стенки резервуара 15.
Далее происходит переориентация системы на другой участок стенки резервуара 15. Сигналы для переориентации поступают на контроллер 12 с компьютера 14, и тот подает сигнал шаговым электродвигателям 7, 8, 9, которые начинают вращать, поднимать, опускать площадку 4 с проектором 5 и фотокамерой 6 таким образом, что переориентируют устройство на другой участок стенки резервуара 15. Далее проводится юстировка, проецирование на участок эталонной сетки, прием фотокамерой 6 «рабочего растра» и вновь переориентирование системы. Эти процессы будут повторяться до тех пор, пока не будет изучена вся поверхность исследуемого резервуара 15.
В итоге, после обследования всей поверхности резервуара 15, в компьютере 14 формируется суммарная картина топологии поверхности стенки резервуара 15, анализируя которую, можно определить его геометрические несовершенства (сколы, вмятины, овальности и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ГЕОМЕТРИЧЕСКИХ НЕСОВЕРШЕНСТВ РЕЗЕРВУАРОВ МУАРОВЫМ МЕТОДОМ | 2011 |
|
RU2454627C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СТЕНКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ МУАРОВЫМ МЕТОДОМ | 2012 |
|
RU2497074C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ПОЗВОНОЧНИКА ЧЕЛОВЕКА, ОСНОВАННОЕ НА ТЕНЕВОМ МУАРОВОМ МЕТОДЕ | 2013 |
|
RU2531457C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| ГРАФО-ПРОЕКЦИОННЫЙ МУАРОВЫЙ СПОСОБ ИЗМЕРЕНИЯ | 2014 |
|
RU2583852C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОБЪЕКТА | 2001 |
|
RU2216710C2 |
| ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2065570C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ, ИМЕЮЩИХ КОНИЧЕСКУЮ ЧАСТЬ | 2018 |
|
RU2698085C1 |
| СТРЕЛКОВЫЙ ВИДЕОТРЕНАЖЕР | 1997 |
|
RU2132036C1 |
| Устройство для измерения деформаций тонкостенных цилиндрических оболочек | 1975 |
|
SU567945A1 |
Изобретение относится к группе контрольно-измерительных приборов, а именно является устройством для определения начальных геометрических несовершенств стенки цилиндрических резервуаров (вмятин, трещин, овальностей и т.д.). Устройство содержит механизм подъема-опускания и поворота платформы, в который входят верхний и нижний фиксаторы, труба с прикрепленной к ней подвижной площадкой. На площадке установлены фотокамера и проектор. Поворот площадки осуществляется посредством шагового электродвигателя, закрепленного внутри нижнего фиксатора. Подъем-опускание площадки осуществляется посредством шагового электродвигателя, закрепленного на трубе и ленточного, тросового или цепного механизмов. Поворот фотокамеры для осуществления настройки устройства производится при помощи шагового электродвигателя. Обеспечение электричеством фотокамеры, проектора, электродвигателя для поворота фотокамеры, электродвигателя для поворота площадки, электродвигателя для подъема-опускания площадки осуществляется посредством силового кабеля, проложенного внутри трубы. Управление шаговыми электродвигателями, проектором и фотокамерой осуществляется посредством контроллера, получающего сигналы через модемную линию связи от компьютера. Технический результат - повышение точности измерения геометрических несовершенств цилиндрических резервуаров. 3 ил.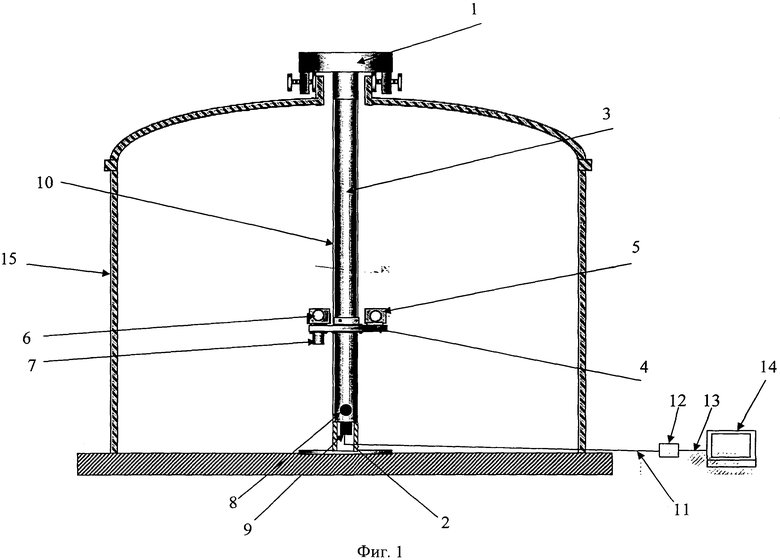
Устройство для определения топологии поверхности, содержащее проектор и фотокамеру, установленные на площадке, при этом фотокамера установлена с возможностью поворота посредством шагового электродвигателя, установленного на площадке, которая прикреплена к трубе с возможностью осуществления поворота и подъема-опускания посредством шаговых электродвигателей, и компьютер с модемной линией, соединенных между собой контроллером, обеспечивающим управление устройством, отличающееся тем, что указанная труба снабжена фиксаторами, расположенными на ее концах, при этом электродвигатель поворота площадки расположен в нижнем фиксаторе, а электродвигатель подъема-опускания площадки установлен на указанной трубе.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОПОЛОГИИ ПОВЕРХНОСТИ МУАРОВЫМ МЕТОДОМ | 2004 |
|
RU2267087C1 |
| "Способ определения рельефа поверхности объекта | 1977 |
|
SU642607A1 |
| ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2065570C1 |
| СПОСОБ СЪЕМКИ ПОПЕРЕЧНЫХ СЕЧЕНИЙ ВЫРАБОТОК ПУТЕМ ФОТОГРАФИРОВАНИЯ ЕЕ КОНТУРА | 0 |
|
SU255594A1 |
| WO 2010114469 A1, 07.10.2010 | |||

