Настоящее изобретение относится к устройству и способу для измерения или анализа свинга в гольфе.
В US 5823878 раскрыты способ и устройство, в которых используются две видеокамеры для съемки движения свинга в гольфе. Это устройство формирует различные графики, которые используются специалистом или экспертом для анализа свинга. Анализ выполняется не автоматически и зависит от знаний и навыков специалиста или эксперта. Устройство и его работа являются относительно дорогостоящими и сложными.
В WO 204/049944 A1 раскрыты способ и устройство, в которых используется набор датчиков движения, закрепленных на игроке, для съемки движения свинга в гольфе. Это устройство формирует различные данные, которые используются специалистом или экспертом для анализа свинга. Аналогично US 5823878, упомянутому выше, анализ выполняется не автоматически и зависит от знаний и навыков специалиста или эксперта. Устройство и его работа также являются относительно дорогостоящими и сложными.
В US 7264554 раскрыты способ и устройство, в которых используется, по меньшей мере, одна видеокамера вместе с набором датчиков движения, закрепленных на игроке, для съемки движений свинга в гольфе. В одном из режимов работы анализ выполняется не автоматически, и система формирует различные визуальные результаты, которые требуют вмешательства человека для анализа свинга. В другом режиме работы говорят, что система автоматически генерирует число, называемое "оценкой кинетического индекса". Однако такое оценочное число имеет очень малое значение для правильного анализа свинга. Аналогично цитируемым выше изобретениям, данное устройство и его работа также являются относительно дорогостоящими и сложными.
В настоящем изобретении предложены устройство и способ для измерения или анализа свинга в гольфе, когда измерение или анализ выполняют в отношении генерируемой энергии и ее передачи через тело и клюшку.
Настоящее изобретение также направлено на устройство и способ для измерения или анализа свинга в гольфе, когда данные преимущественно получают от сил реакции, воздействующих на участок земли, на котором стоит игрок, и где обработанные сигналы анализируют, используя искусственных интеллект. Термин "силы реакции, воздействующие на землю" относится к силе реакции, которая возникает между неподвижной поверхностью и ногами субъекта или игрока.
Настоящее изобретение также, более конкретно, направлено на устройство и способ, которые измеряют или анализирует свинг в гольфе автоматически или используя автоматический и интерактивный подходы.
Изобретение более конкретно определено в приложенной формуле изобретения, которая входит в состав настоящего описания, по ссылке на нее.
Краткое описание чертежей
Изобретение будет теперь описано только в качестве примера, со ссылкой на фиг. 1 - фиг. 18.
На фиг. 1 схематично показан вид спереди модели игрока и клюшки в положении маха вниз, представляющий некоторые из основных сегментов, подсегментов и соединений.
На фиг. 2 показана блок-схема, представляющая последовательные этапы при измерении или анализе свинга, используя данные параметра энергии и данные правила оптимизации.
На фиг. 3 показана блок-схема, представляющая основные последовательности локального генерирования энергии при махе вниз.
На фиг. 4 показана блок-схема, представляющая последовательные этапы при детектировании и обработке информации для свинга, используя средство искусственного интеллекта.
На фиг. 5 показана блок-схема, представляющая поток информации при выполнении свинга с интерактивной тренировкой.
На фиг. 6 представлено прогнозирование, полученное с помощью нейронной сети, углового положения сегмента таза в ходе выполнения свинга.
На фиг. 7 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости сегмента таза в ходе выполнения свинга.
На фиг. 8 представлено прогнозирование, полученное с помощью нейронной сети, углового положения плеч/сегмента туловища в ходе выполнения свинга.
На фиг. 9 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости плеч/сегмента туловища в ходе выполнения свинга.
На фиг. 10 представлено прогнозирование, полученное с помощью нейронной сети, углового положения сегмента рукоятки/клюшки в ходе выполнения свинга.
На фиг. 11 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости сегмента рукоятки/клюшки в ходе выполнения свинга.
На фиг. 12 представлено прогнозирование, полученное с помощью нейронной сети, абсолютной скорости головки клюшки в ходе выполнения свинга.
На фиг. 13 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости сегмента рукоятки/клюшки в ходе выполнения свинга, когда входные сигналы сети включают в себя различные обработанные параметры и боковые силы.
На фиг. 14 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости сегмента рукоятки/клюшки в ходе выполнения того же свинга, как показано на фиг. 13, когда входные параметры сети включают в себя различные обработанные параметры, но не включают в себя боковые силы.
На фиг. 15 представлено прогнозирование, полученное с помощью нейронной сети, угловой скорости сегмента рукоятки/клюшки в ходе выполнения того же свинга, как показано на фиг. 13, в случае, когда входные сигналы сети включают в себя только прямые вертикальные и боковые силы.
На фиг. 16 показан необработанный график прогнозирования, полученный с помощью нейронной сети, и соответствующий сглаженный график прогнозирования в ходе выполнения свинга.
На фиг. 17 показано прогнозирование точки во времени, полученное с помощью нейронной сети, во время верхнего положения при замахе клюшки, и также показано представление треугольной функции взвешивания, используемой при составлении прогноза.
На фиг. 18 схематично показан вид в плане пластины сил в виде двойной платформы и мячик, расположенный на игровой поверхности. Типичные положения ступней игрока обозначены на пластине сил.
Подробное описание изобретения
В ходе описания и в формуле изобретения представлено устройство и способ для игрока, который бьет по мячику в направлении цели, которая типично соответствует лунке в грине. Направление к цели называется направлением на цель, и рука или нога игрока, расположенная ближе всего к цели, может называться рукой или ногой со стороны цели. Игрок-правша обычно бьет по мячику справа налево. Унос относится к событию во времени, когда игрок перемещает клюшку из положения адреса в начале замаха. Ударом называется событие во времени, когда головка клюшки ударяет мячик, и завершением называется часть свинга, которая происходит после удара. Различные точки замаха и маха вниз обычно могут отслеживаться относительно угла между рукояткой клюшки и вертикальной осью, на виде спереди на игрока, где BS, DS и FT обозначают замах, мах вниз и завершение соответственно. Унос происходит приблизительно при BS0° и доходит до BS90°, когда рукоятка клюшки занимает горизонтальное положение, и до BS180°, когда рукоятки клюшки ориентирована вертикально вверх, с продолжением до конца замаха. Клюшка выполняет вращение, обратное замаху, при этом рукоятка клюшки занимает вертикальное положение вверх при DS180°, последовательно переходит в горизонтальное положение при DS90° и ударяет в положении приблизительно DS0°. Она затем продолжает движение завершения, достигая FT90° в горизонтальном положении. Промежуточные угловые положения аналогично выражены в соответствующих углах.
Основная цель выполнения свинга состоит в том, чтобы обеспечить перемещение мячика как можно дальше в намеченном направлении или в направлении цели. Это достигается путем удара по мячику головкой клюшки с очень высокой скоростью и с обеспечением точного контакта между поверхностью клюшки и мячиком. Основная цель большинства других свингов состоит в том, чтобы обеспечить перемещение мячика на требуемое расстояние, которое меньше, чем максимальное расстояние, на которое игрок может послать мячик во время удара, также в намеченном направлении или в направлении цели. В описании и формуле изобретения термин свинг следует понимать как относящийся ко всем ударам, выполняемым к гольфе, или к свингу, кроме удара паттером.
Достижение очень высоких скоростей головки клюшки, типичных при компетентном выполнении свинга, неожиданно требует выполнения сложного набора действий, которые часто неправильно понимаются игроками в гольф или тренерами. Среди игроков, тренеров и других участвующих в игре профессионалов существует общее убеждение в том, что свинг отдельных игроков в гольф находится за пределами оценки научного типа и может быть эффективно проанализирован и улучшен только при вмешательстве человека, с использованием навыков и опыта тренера. Такое общее убеждение, по-видимому, распространяется на все свинги в гольфе.
Аспект настоящего изобретения направлен на понимание того, что свинг отдельного игрока может получить научную оценку и может быть проанализирован без вмешательства человека, путем идентификации, измерений и анализа элементов генерирования энергии и ее передачи через корпус. Такое понимание в равной степени относится к свингам, выполняемым с целью получения максимальной скорости головки клюшки, а также к свингам, выполняемым с целью получения скоростей головки клюшки меньше, чем максимальная, на которую способен игрок. Такое понимание является далеко не очевидным, потому что до настоящего времени секреты свинга в гольфе в равной степени применяются для свинга, требующего максимальную и минимальную энергию. Игроки и тренеры также должны понимать, что попытки более сильного удара по мячику обычно приводят к худшим результатам.
Другой связанный аспект изобретения относится к пониманию того, что для типичных опытных игроков большая часть важных элементов генерирования энергии и ее передачи через тело остается одинаковой или аналогичной от одного свинга к другому и анализ одного свинга может быть действительным для всех характерных свингов, выполняемых этим игроком.
Дополнительный аспект изобретения относится к пониманию того, что игроки стремятся использовать аналогичный тип генерирования энергии и ее передачу через тело в целом диапазоне свингов. В частности, тип генерирования и передачи энергии, используемый для более длинных клюшек, таких как драйвер, проявляет тенденцию формирования шаблона для генерирования энергии и ее передачи для свинга с использованием всего полного диапазона клюшек. Таким образом идентификация и улучшение генерирования энергии и передачи ее для одной такой клюшки предпочтительно могут применяться для других клюшек во всем их диапазоне.
В дополнение к генерированию очень высокой скорости головки клюшки, когда это требуется, правильное выполнение совершенного генерирования энергии и ее передачи через тело также является фундаментальным для обеспечения точности во время удара. Тесты показали, что свинги с совершенным генерированием и передачей энергии, показывают минимальные потери энергии, проявляют тенденцию быть более последовательными, содержат более плавные движения и сводят к минимуму необходимость напрягать тело для поглощения неиспользованной энергии во время завершения удара. Такие характеристики способствуют улучшению контроля и точности игрока во время выполнения удара.
Специфичные важные параметры свинга, которые являются непосредственно значимыми для генерирования и передачи энергии через тело и в конечном итоге на головку клюшки, будут для простоты описания называться "параметрами энергии". Информация или параметры, используемые для определения или расчета параметров энергии, также будут называться параметрами энергии. Аспект изобретения направлен на идентификацию ключевых параметров энергии.
Критерии или правила, определяющие, как на свинг влияют его параметры энергии, будут для простоты описания называться "правилами оптимизации". Эти критерии могут быть представлены различными способами, но для последовательности настоящего описания, везде, где только возможно, правила оптимизации будут представлены как критерии, представляющие более совершенные свинги. Последовательная невозможность следования таким правилам оптимизации будет соответствовать менее совершенным свингам или ошибкам при выполнении свинга.
На фиг. 2 показана блок-схема, представляющая последовательные этапы, когда систему используют для анализа свинга с использованием данных параметра энергии и данных правила оптимизации. Описательные сокращения, используемые на чертеже, представлены в круглых скобках в следующем кратком описании. Информацию о свинге (S, С), которая позволяет выполнять измерения или определение параметров энергии, получают с помощью средства (ММ, СИ) измерения. Средство (EPDM, СДПЭ) данных параметра энергии определяет параметры энергии из этой информации. Средство (ORDM, СДПО) данных правил оптимизации представляет критерии, в соответствии с которыми определяют параметры энергии, позволяющие для средства анализа формировать анализ (A, А) свинга.
Для того чтобы помочь идентификации и анализу параметров энергии, игрока и клюшку моделируют как кинетическую цепь сегментов, соединенных универсальными соединениями. Теперь рассмотрим фиг. 1, на которой схематично представлен вид спереди модели игрока и клюшки в положения середины маха вниз.
Кинетическая цепь может быть упрощена до одной цепи из четырех соединенных сегментов, хотя можно использовать другие более сложные варианты выполнения. Использование четырех сегментов упрощает анализ и описание, сохраняя большую часть точности более сложных моделей. Для удобства первый, второй, третий и четвертый сегменты цепи будут обозначены как "S1", "S2", "S3" и "S4" соответственно. В качестве альтернативы, они для удобства могут быть названы как сегменты "таза", "туловища", "рук" и "клюшки", хотя анатомически правильные описания этих сегментов отсутствуют. Компоненты цепи расположены в следующем порядке у игрока, который выполняет удар справа налево, что является типичным для игрока-правши. Зеркально отображенная компоновка относится к игрокам, которые выполняют удар слева направо. При использовании номеров ссылочных позиций или буквенных обозначений на чертеже первый сегмент S1 представляет собой нижнюю часть туловища или сегмент "таза". Он содержит таз и ноги и гибко соединен с землей (1) через ступни. Второй сегмент S2 представляет собой сегмент верхней части тела и содержит плечи и туловище выше талии. Его можно рассматривать как в значительной степени жесткий сегмент, гибко соединенный с S1 через универсальное соединение и спинную часть талии (2). Третий сегмент S3 представляет сегмент рук. Он содержит обе руки и универсально соединен с S2 через левый плечевой сустав (3). Четвертый сегмент S4 содержит кисти и клюшку. Его можно рассматривать как в значительной степени жесткий сегмент, универсально соединенный с S3 через левое запястье (4). Левая рука рассматривается как в значительной степени жесткий сегмент, который остается, по существу, прямым при выполнении части, хотя и не всего, движения свинга, соединяющий S2 и S4. Правая рука изгибается во время свинга, и, хотя она соединяет S2 и S4, она не соединена с ними непосредственно с использованием соединений цепи, но используется для частичной передачи энергии и управления свингом. Соединение ступни-земля представляет собой обозначенный проксимальный конец цепи и оконечность головки клюшки (CH) обозначена как дистальный конец. Описываемый сегмент может называться "данным" сегментом.
По причинам, которые будут понятны ниже в ходе описания, некоторые из сегментов также разделены на подсегменты. Сегмент туловища разделен на сегмент S2a нижнего туловища и сегмент S2b верхнего туловища, соединенные в центральном положении (5) спины. Такое разделение выполнено, в определенной степени, произвольно и отражает гибкость позвоночного столба и нижней части спины. Каждая рука также разделена на два подсегмента, левая рука разделена на верхний сегмент руки S3aL и нижний сегмент руки S3bL, с соединением, расположенным в левом локте (6). Правая рука аналогично разделена на два подсегмента S3aR и S3bR. Следует отметить, что существуют различия между сегментами и подсегментами и их следует рассматривать по-разному в ходе анализа.
ГЕНЕРИРОВАНИЕ И ПЕРЕДАЧА ЭНЕРГИИ
Сегменты цепи получают кинетическую энергию как в результате генерирования энергии от мышц, ассоциированных с движением самого сегмента, так и в результате передачи энергии им от проксимальных сегментов. Во время выполнения свинга в гольфе, как и в случае, когда требуется обеспечить максимальное расстояние, так и в случае, когда это не требуется, конечная цель кинетической цепи состоит в том, чтобы передать энергию так эффективно, насколько это возможно, в дистальную оконечность головки клюшки цепи в момент, когда происходит ее столкновение с мячиком. Общая кинетическая энергия в любой точке свинга будет представлять собой сумму кинетических энергий отдельных сегментов. Если сегмент выполняет линейное движение, его линейная кинетическая энергия может быть определена как 1/2mv2, где m и v представляют собой массу и линейную скорость сегмента соответственно. Если сегмент выполняет угловое движение, его угловая кинетическая энергия может быть определена как 1/2lw2, где l и w представляют собой момент инерции сегмента и угловую скорость соответственно. Хотя линейная и вращательная кинетические энергии отличаются в любой момент времени, они могут быть полностью или частично преобразованы из одной в другую во время выполнения свинга.
Мгновенное генерирование энергии в сегменте из мышц, связанных с сегментом, для удобства будет называться "локальной" энергией, и работа, производимая ею, будет называться "локальной" работой. В случае S1, такие "локальные" мышцы преимущественно содержат мышцы бедер и ног, которые придают вращение и линейное перемещение таза. В случае других сегментов, локальная энергия в основном возникает в результате действий мышц, которые преимущественно действуют совместно с соединением между данным и проксимальным сегментами. Таким образом, S2, S3 и S4 получают локальную энергию от действия мышц, которые преимущественно действуют совместно с соединениями между S1 и S2, S2 и S3, и S3 и S4 соответственно. "Локальная" энергия обеспечивает исходный источник всей энергии, генерируемой и передаваемой во время свинга в гольфе.
Важный механизм, с помощью которого энергию передают из одного сегмента в другой вдоль цепи, представляет собой "фиксацию" данного сегмента с ускоряющимся проксимальным сегментом, таким образом, что данный сегмент ускоряется вместе с проксимальным сегментом, с использованием энергии, генерируемой в или существующей в проксимальном сегменте. Этот процесс для удобства будет называться передачей "фиксации", при этом сегменты "фиксируются" и "высвобождают фиксацию", когда процесс начинается и заканчивается соответственно. Фиксация также может возникать вдоль цепи сегментов, зафиксированных вместе, при этом все сегменты в цепи ускоряются под действием энергии, генерируемой в или существующей в наиболее проксимальном сегменте в фиксированной цепи. Как правило, данный сегмент фиксируется с проксимальным сегментом в начале движения, получая в результате относительно малую энергию скорости в процессе, и в последующем "высвобождает фиксацию", когда он ускоряется до большей скорости, чем проксимальный сегмент. Передача фиксации происходит как во время вращательного, так и во время линейного движения.
Когда локальную энергию используют для запуска движения данного сегмента от проксимального сегмента, происходит передача момента между ним и проксимальным сегментом. Кинетическая энергия обычно передается между сегментами, когда это происходит, и процесс для удобства будет называться передачей "запуска".
В ходе выполнения свинга комбинированные сегменты S3 и S4 выполняют метание, аналогичное метанию из пращи, вокруг проксимальных сегментов от соединения в левом плечевом суставе. Кроме получения энергии от локальной энергии мышц плеч и плечевых частей рук, вращающих S3, энергия также передается от проксимальных сегментов под действием сил в левом плече, вытягивающих такую компоновку метания. Такая передача нелокальной энергии с проксимальных сегментов для удобства будет называться передачей "метания", поскольку аналогичная передача энергии происходит в известной праще или рогатке. Вытягивающие силы образуются в результате вращения или линейного перемещения левого плечевого сустава под действием энергии от проксимальных сегментов. Энергия может возникать дистанционно от проксимальных сегментов или в результате замедления углового или линейного движения сегмента S2. В отличие от передачи фиксации, передача метания также может возникать от замедляющего сегмента, поскольку угловые или линейные скорости вовлеченных сегментов не являются фиксированными при одинаковых угловых скоростях. На определенных участках дуги метания перемещение вперед или поворот левого плеча ускоряет дистальный конец рогатки, включающей в себя замедление движения левого плеча с более высокой скорости при движении вперед.
Другой тип передачи энергии между сегментами, которая происходит во время свинга, для удобства будет называться "цеповой" передачей, поскольку она выполняется в соответствующих видах оружия (кистень) и в сельскохозяйственных инструментах с таким названием. Это происходит, когда два соединенных сегмента вращаются и перемещаются в одном направлении, и оба они содержат кинетическую энергию, и при этом дистальный конец проксимального сегмента замедляется, обеспечивая замедление проксимального конца дистального сегмента вместе с ним и одновременно обеспечивая ускорение дистального конца дистального сегмента в повышенной степени, благодаря сохранению большей части кинетической энергии сегмента. В случае когда замедление проксимального сегмента происходит в значительной степени без потери или обратной передачи энергии, как и в случае исторического цепа, изменение кинетической энергии в проксимальном сегменте также передается в дистальный конец дистального сегмента. При совершенном свинге сегменты S3 и S4 действуют как управляемый цеп, состоящий из двух частей, обеспечивая достижение с намного более высокой скоростью головки клюшки на дистальном конце, чем это было бы возможно, если бы S3 и S4 действовали как одиночный сегмент. Благодаря удержанию S3 и S4 фиксированными под соответствующим прямым углом или немного меньшим углом, вплоть до критической точки во время маха вниз, затем открывается цеповой механизм, благодаря центробежной силе, что обеспечивает быстрое увеличение степени ускорения головки клюшки на дистальном конце, при одновременном замедлении S3 и проксимального конца S4. В результате происходит значительная передача кинетической энергии на дистальный конец. Цеповая передача также может возникать между другими соединенными сегментами.
Другой, менее критичный, тип передачи энергии между сегментами происходит, когда поворачивающийся игрок уменьшает свой угловой момент инерции в результате уменьшения эффективного радиуса вращения корпуса вокруг общей оси вращения, путем подтягивания проксимального конца S4 и дистального конца S3 ближе к телу на более поздних этапах маха вниз. Поскольку выполняется сохранение момента, в результате происходит общее увеличение угловой скорости и энергии, которая при завершении свинга передается на головку клюшки. Такой тип передачи будет называться передачей кинетической энергии с "уменьшением радиуса".
Кинетическая энергия преобразуется в потенциальную энергию во время замаха, когда сегменты S3 и S4 приподнимаются против действия силы гравитации, и тело игрока упруго отклоняется в положение TOB (ВПЗ, верхнее положение замаха) различных сегментов. Большая часть этой энергии обычно восстанавливается в результате обратного преобразования в кинетическую энергию во время маха вниз. Кинетическая энергия также преобразуется в потенциальную энергию во время упругого отклонения рукоятки клюшки во время маха вниз. Некоторая часть этой энергии может быть восстановлена до удара во время окончания свинга.
Кинетическая энергия также используется в процессе, который аналогичен преобразованию в потенциальную энергию, поскольку он приводит к ситуации, когда дополнительная кинетическая энергия может быть позже реализована. Этот процесс относится к растяжению мышц, используемых в свинге, в процессе, который обычно называется "растяжением-сокращением" в биомеханической литературе. В соответствующих обстоятельствах мышцы, которые растягиваются-сокращаются, способны производить энергию в значительно большей степени и в большем количестве, чем в других случаях. Такое явление используется при выполнении совершенного свинга, для использования кинетической энергии во время замаха и на ранних этапах маха вниз, как средство генерирования большей кинетической энергии в большей степени позже во время маха вниз.
ОБЩЕЕ ГЕНЕРИРОВАНИЕ И ПЕРЕДАЧА ЭНЕРГИИ ДЛЯ БОЛЬШИНСТВА СВИНГОВ
Генерирование энергии начинается во время замаха, когда сегменты поворачиваются по часовой стрелке на виде в плане для установки положения TOB сегмента. "TOB" обозначает общеприменимое выражение в гольфе "верхнее положение замаха" и относится к крайнему положению движения сегмента во время замаха, перед движением в обратную сторону для начала маха вниз (хотя обычно в общей терминологии гольфа относится только к сегменту клюшки). Сегменты обычно достигают своих соответствующих положений TOB в разное время. Термины "TOB-1", "TOB-2", "TOB-3" и "TOB-4" используются для обозначения верхнего положения замаха для сегментов 1, 2, 3 и 4 соответственно. Мах вниз начинается из TOB для каждого сегмента, и различные сегменты обычно начинают свое вращение при махе вниз в разные моменты времени, при этом направление маха вниз представляет собой вращение против часовой стрелки в виде в плане. Сегменты в определенный момент могут находиться в TOB или эффективно мгновенно изменяют направление движения в TOB на обратное.
Мах вниз может начаться с генерирования локальной энергии при вращении S1, которое начинается из TOB-1. Некоторые или все другие сегменты, S2, S3 и S4, могут быть зафиксированы в формате цепи с S1, что заставляет эти сегменты вращаться в результате передачи энергии из-за фиксации от локальной генерируемой энергии в S1.
Как правило, по мере выполнения маха вниз локальные энергии заставляют S2 начать вращение относительно S1 и S3 начать вращение вокруг левого плечевого сустава. Эти движения способствуют созданию требуемого составного поворота в наклонной плоскости свинга. Такие различные движения обеспечивают передачу энергии вдоль цепи с использованием передачи метания.
Потенциальная энергия генерируется в результате увеличения высоты с преодолением силы тяжести S3 и S4 во время замаха и на начальной стадии маха вниз. Такая энергия постепенно преобразуется обратно в кинетическую энергию в ходе выполнения свинга для удара по мячику. Этот источник энергии, по существу, идентичен как для совершенных, так для и несовершенных свингов и поэтому не будет здесь дополнительно описан в этом описании, хотя он составляет существенный компонент свинга.
Сегменты рук и клюшки S3 и S4 включатся в работу под углом, который существенно меньше, чем развернутый угол в начале маха вниз. Они вытягиваются, либо постепенно или управляемым образом в ходе свинга, и головка клюшки вытягивается наружу под действием центробежной силы и может приблизительно устанавливаться под развернутым углом в момент времени, когда головка клюшки входит в контакт с мячиком. На относительный угол между S3 и S4 будет влиять фиксация или высвобождение из фиксации, если это происходит между этими сегментами во время свинга, поскольку фиксацию можно использовать для поддержания исходного угла между сегментами. При благоприятных обстоятельствах высвобождение фиксации этих сегментов приводит к дополнительной передаче энергии вдоль цепи, благодаря цеповой передаче.
Локальную энергию можно использовать как энергию для вращения S4.
Локальные энергии, вызывающие движение S2, S3 и S4 относительно их соответствующих проксимальных сегментов, каждая может обеспечить дополнительную передачу энергии вдоль цепи путем передачи запуска.
ГЕНЕРИРОВАНИЕ ЭНЕРГИИ И ПЕРЕДАЧА В ОПТИМИЗИРОВАННОМ СВИНГЕ
Генерирование энергии начинается во время замаха, который содержит гораздо меньший уровень генерирования и передачи энергии, чем при махе вниз. Во время оптимального замаха сегменты перемещаются плавно и скоординированно для установки положения TOB во временной последовательности TOB-1, TOB-2, TOB-3 и TOB-4. Мах вниз начинается из TOB для каждого сегмента и при оптимальном свинге начинается в том же порядке, в котором закончился замах, то есть TOB-1, TOB-2, TOB-3 и TOB-4. При идеальном свинге каждый TOB типично изменяется быстро с замаха на мах вниз таким образом, что начало последовательности общего маха вниз сегментов накладывается на окончание общей последовательности сегментов при замахе.
Одно из наиболее важных действий в начале маха вниз представляет собой генерирование локальной энергии при повороте S1, который начинается из TOB-1. При идеальном свинге S2, S3 и S4 фиксируются с S1 в формате цепи во временной последовательности, начинающейся в TOB-2, TOB-3 и TOB-4 соответственно, что заставляет эти сегменты вращаться с передачей энергии, благодаря фиксации, от локальной энергии, генерируемой в S1.
И снова, при идеальном свинге, некоторая степень дополнительного отклонения тела, которая приводит к растяжению-сокращению мышц, возникает на ранних этапах маха вниз для сегментов S2, S3 и S4, в результате чего последовательно развивается фиксация с S1. Наиболее важный пример такого процесса возникает в случае S1 и S2. Когда начинается фиксация S2 с S1 в TOB-2, S1, очевидно, вращается с большей скоростью, чем S2. Такая ситуация сохраняется на короткий период с постепенным увеличением относительного угла между тазом и плечами. В конечном итоге S2 достигает угловой скорости S1, и в этот момент можно считать, что происходит полная фиксация S1-S2. В этот момент угол между тазом и плечами является максимальным, и растяжение-сокращение мышц между S1 и S2 заканчивается. Имеются мышцы, ассоциированные с генерированием локальной энергии в S2. Этот момент иногда называется в учебной литературе моментом "растяжения X-фактора" и будет здесь называться аналогичным термином "растяжение S1-S2". Дополнительное относительное вращение S1 и S2 изменяется на протяжении приблизительно 0°-3°. Более высокие значения могут быть механически непродуктивными и могут привести к травме. Опытные игроки достигают значений в средней области этого диапазона. Аналогично, точки, в которых сегменты S3 и S4 достигают угловой скорости своих проксимальных сегментов в исходном процессе фиксации, называются точками "растяжения S2-S3"' и "растяжения S3-S4" соответственно. Такие растяжения, в случае необходимости, могут быть рассчитаны по подсегментам, например растяжение S1-S2 можно рассматривать и рассчитывать как растяжение S1-S2a-S2b.
Во время исходного фиксированного вращения S2 сустав левого плеча поворачивается вокруг оси вращения S2, в свою очередь, вытягивая левую руку. Направление такого вытягивания происходит вне пределов линии с центром масс комбинации сегментов S3-S4, и сила вытягивания заставляет или способствует началу движения S3-S4, которое быстро развивается как дугообразное движение в плоскости, которая обычно называется плоскостью свинга. Это представляет начало передачи кинетической энергии в S3 и S4 с использованием передачи метания. По мере выполнения движения свинга сила вытягивания остается за пределами линии через центр масс и продолжает ускорять комбинацию S3-S4 при выполнении дугообразного движения с головкой клюшки на ее дистальном конце. Из-за различия в длинах радиуса вокруг их соответствующих осей вращения, возникает предпочтительный эффект увеличения между скоростями левого плеча и дистального конца головки клюшки.
Такое качающееся движение в плоскости свинга также получает локальную энергию в плече при вращении сегмента рук вокруг левого плечевого сустава. Составное движение сегментов S3-S4 вокруг близкой к вертикальной оси вращения S2 и близкой к горизонтальной оси вращения левого плеча обеспечивает соответствующее угловое движение в наклонной плоскости свинга. Это обеспечивает дополнительный составной компонент механизма свинга.
По мере выполнения свинга, когда головка клюшки достигает большей скорости, локальную энергию используют для запуска сегмента S2 от сегмента S1 с постепенным высвобождением фиксации их движения в процессе. Такое действие содержит генерирование локальной энергии и выполняется с помощью энергии мышц, ассоциированной с соединением между S1 и S2, и позволяет получать большие угловые скорости, чем можно было бы достичь при фиксации этих сегментов. Это продолжает подачу энергии в механизм передачи во время свинга с еще большим увеличением скорости.
Во время этих первых этапов маха вниз S4 остается фиксированным с S3, при этом угол между нижней рукой и рукояткой клюшки типично поддерживается игроком под углом приблизительно 60°-70°. Игрок затем высвобождает фиксацию S3-S4, приблизительно вокруг DS170°-DS135°, после чего начинается передача кинетической энергии с использованием цепового механизма. Во время высвобождения фиксации комбинация S3-S4 поворачивается с высокой скоростью вокруг левого плечевого сустава с генерированием большой центробежной силы. Эти силы быстро раскрывают нефиксированный угол между S3 и S4, обеспечивая повышенное ускорение дистального конца S4 и замедление его проксимального конца. Общая энергия, по существу, сохраняется, и происходит передача кинетической энергии от замедляющихся рук и кистей к быстро ускоряющейся головке клюшки.
Как и все действия высвобождения фиксации, высвобождение фиксации S3-S4 происходит в течение короткого времени. Характеристика действия высвобождения фиксации является существенной из-за ее важности в отношении конечного развития скорости головки клюшки. Действия по высвобождению вращательной фиксации S3-S4 представляют собой движение запястья и представляют собой действие "выравнивания" запястья в учебной терминологии.
S3 продолжает вращение до удара, продолжая получать свою собственную локальную энергию после высвобождения фиксации S3-S4.
После высвобождения фиксации S4 от S3 игрок обычно обеспечивает энергию вращения S4 от локальной энергии мышц, ассоциированных с соединением S3-S4, то есть в основном от мышц, ассоциированных с локтевым и кистевым суставами. Это также обеспечивает начало передачи энергии, которая происходит от S3 к S4.
Когда требуется обеспечить максимальное расстояние при ударе, игрок стремится согласовать максимальную скорость головки клюшки с моментом времени удара. Это создает особые трудности, поскольку кистевой сустав обычно не способен передавать энергию для действия кисти с высокой скоростью, типичной для опытных игроков, во время приближения к точке удара. Опытный игрок предпочтительно использует энергию упругой деформации рукоятки клюшки, образующейся в результате большего ускорения некоторых частей во время маха вниз. Часть такой энергии упругой деформации высвобождается при распрямлении рукоятки, когда головка клюшки уменьшает свою степень ускорения, из-за падения локальной энергии S4, хотя все еще имеет положительное ускорение непосредственно перед ударом.
СПЕЦИФИЧНЫЕ АСПЕКТЫ ОПТИМИЗИРОВАННЫХ СВИНГОВ
Способ, в соответствии с которым выполняют замах и изменение его направления на обратное при махе вниз, является важным при установке оптимальных характеристик параметров энергии. В частности, сегменты должны быть плотно скучены во время замаха с ограничениями установки правильного положения, поддержания контроля и исключения риска травмы.
Это обеспечивает следующие преимущества:
i) Обеспечивает возможность начала фиксации во время маха вниз с минимальной поддержкой мышц, при этом связи между сегментами в основном являются механически пассивными.
ii) Обеспечивает максимальное растяжение-сокращение во время замаха, сводя к минимуму величину, требуемую во время начальной фазы маха вниз.
iii) Обеспечивает максимальное накопление потенциальной энергии, благодаря упругой деформации, что позволяет восстанавливать ее во время маха вниз.
iv) Сокращает длительность времени, требуемую для начала выполнения маха вниз, предоставляя больше времени и возможностей для оптимизации других аспектов цепи маха вниз.
Факторы, которые способствуют такому закручиванию сегментов, включают в себя следующие:
i) Сегменты должны достичь достаточной угловой скорости и соответствующей кинетической энергии во время замаха для адекватного снабжения энергией закрученных сегментов.
ii) Сегменты должны закончить свое поворотное закручивание во временной последовательности S1, S2, S3 и S4. Это способствует тому, что при каждом последующем закручивании будут удерживаться или затягиваться предыдущие закручивания. Если какой-либо сегмент закончит свое закручивание не по порядку, это может привести к ослаблению закручивания предыдущего закрученного сегмента.
iii) Каждое положение TOB должно быть закончено плавно и резко, и должно быстро начаться обратное движение в противоположном направлении вращения.
Мах вниз начинается с поворота S1 в TOB-1, при этом сегменты S2, S3 и S4 фиксируются с ним по цепи при первой возможности, то есть в TOB-2, TOB-3 и TOB-4 соответственно. Такой ранний низкоскоростной этап маха вниз обеспечивает возможность полного использования относительно медленной, но мощной локальной группы мышц S1.
Специалистами в биомеханике предшествующего уровня техники было установлено, что локальная группа мышц S1 позволяет преимущественно повысить степень растяжения-сокращения локальной группы мышц S2 на начальных этапах маха вниз. Такое дополнительное растяжение-сокращение выходит за пределы и превышает то, что возможно и реально выполнимо во время замаха, и должно выполняться при оптимальном свинге. Хотя это менее важно, оно также предпочтительно должно выполняться во время эквивалентных начальных стадий фиксации S3 и S4. Такие процессы растяжения-сокращения при махе вниз имеют особое преимущество, состоящее в том, что они используют относительно медленнодействующую локальную группу мышц S1 для передачи энергии для исходного растяжения-сокращения всех дистальных сегментов с последующей реализацией дополнительной энергии в более быстродействующих мышцах дистального сегмента.
Фиксация обеспечивает чрезвычайно предпочтительный способ передачи энергии на ранних этапах свинга и должна начинаться как можно раньше для каждого сегмента с соответствующим допуском для физиологических требований растяжения-сокращения, то есть при фиксации S2, S3 и S4 в последовательности цепи с S1. Преимущества ранней фиксации включают в себя то, что она:
(a) Обеспечивает чрезвычайно эффективную передачу энергии по цепи.
(b) Не приводит к работе или смещению мышц в данном сегменте, и ее можно постоянно использовать без растрачивания энергии линии мышц в пределах этого сегмента.
(c) Поддерживает мышцы в начальных положениях их перемещения до тех пор, пока не требуется их смещение в других режимах промежуточных движений сегмента.
Несколько факторов эффективности проявляются, когда происходит запуск сегмента от своего соседнего проксимального сегмента.
Первый фактор эффективности относится к степени локальной работы, требуемой для выполнения начала движения сегмента. Если рассматривать в изоляции, начальное движение сегмента наиболее эффективно выполняется, если происходит задержка начала движения данного сегмента до тех пор, пока проксимальный сегмент не закончит свой этап ускорения в том же направлении вращения. Это можно продемонстрировать, когда данный сегмент имеет массу М1, и во время начала его движения требуется обеспечить линейное ускорение относительно проксимального сегмента, который имеет ускорение А1. Если проксимальный сегмент закончил свой этап ускорения и движется с постоянной скоростью вместе с запущенным данным сегментом, сила, требуемая от локальных мышц для выполнения запуска, составляет М1·А1. Однако, если будет предпринята попытка начала запуска, когда проксимальный сегмент все еще ускоряется в степени Ap, сила, требуемая от локальных мышц, будет существенно больше и составит М1·(А1+Ap). Аналогичная ситуация возникает, когда выполняется вращательное движение.
Второй фактор эффективности относится к передаче энергии между двумя сегментами. Когда используют локальную энергию для начала запуска данного сегмента от проксимального сегмента, передача момента в проксимальный сегмент происходит, поскольку обеспечивается сохранение общего момента. Кинетическая энергия типично передается между сегментами, когда это происходит, направление передачи зависит от скоростей сегментов. Эффекты передачи момента и кинетической энергии могут быть достаточно разными, поскольку момент пропорционален скорости, а кинетическая энергия пропорциональна квадрату скорости. Неблагоприятная передача энергии в проксимальный сегмент происходит, если проксимальный сегмент находится в состоянии покоя, когда начинается относительное движение. Однако передача энергии от проксимального сегмента в данный сегмент предпочтительно происходит, если проксимальный сегмент движется в направлении начала запуска в течение длительности начала движения. Чем выше скорость проксимального сегмента, тем больше будет передано энергии в данный сегмент. Поэтому передача энергии во время начала запуска из проксимального сегмента будет максимизирована, когда проксимальный сегмент имеет максимальную скорость. Передача во время начала запуска происходит как при вращательном движении, так и при линейном движении.
Третий фактор эффективности относится качеству фиксации, состоящему в том, что, как только начинается запуск, данный сегмент будет двигаться с большей скоростью, чем проксимальный сегмент, и фиксация больше не поддерживает свою исходную пассивную механическую связь, требуя активации мышц для поддержания этой связи. Действительно, в некоторых случаях фиксация может больше не обеспечивать эффективную работу или вообще, в частности, в случае вращательной фиксации S1-S2, при которой происходит поворот обоих сегментов вокруг аналогично расположенных и наклонных осей.
Учитывая эти факторы, становится понятно, что в случае, когда все другие данные равны, при оптимальном свинге, проксимальный сегмент должен ускоряться до пиковой скорости как можно быстрее, и начало запуска данного сегмента должно начаться только после того, как проксимальный сегмент закончит свое ускорение и достигнет пиковой скорости. Кроме того, поскольку общий принцип работы в кинетической цепи состоит в том, чтобы закончить все действия без ненужных задержек, идеально вместе или близко в последовательности, высвобождение фиксации и начало запуска должны происходить, как только проксимальный сегмент достигнет пиковой скорости проксимального сегмента.
Из приведенного выше можно видеть, что при выполнении оптимального свинга, в случае, когда все остальные параметры равны, сегменты достигают максимальной скорости во временной последовательности S1, S2, S3 и S4.
В дополнение к генерированию момента и кинетической энергии вокруг основной оси свинга, игрок также генерирует существенные компоненты углового и поступательного момента и кинетической энергии, по существу, в передней плоскости. Это включает в себя повороты сегмента вокруг горизонтальных осей, перпендикулярных передней плоскости, и линейные движения сегмента, параллельно передней плоскости. Такая энергия и перемещение называются генерированием и передачей энергии во "вспомогательной передней плоскости" и в определенной степени связаны с процессами, называемыми в учебной терминологии "сдвигом веса". "Передняя плоскость" определена как вертикальная плоскость, выровненная с направлением на цель.
Движения во вспомогательной передней плоскости, по существу, соединяются с угловыми движениями основного свинга и в модели из четырех сегментов также получают энергию от тех же локальных групп мышц.
Энергия во вспомогательной передней плоскости отличается от энергии основного свинга тем, что она может быть сгенерирована и передана принципиально другими способами у опытных игроков. Тесты показали, по меньшей мере, три различных техники, используемые опытными игроками при генерировании и передаче этой дополнительной проксимальной энергии. Определили, что приблизительно в 50% свингов используют особую технологию, которая будет называться типом "A". Приблизительно в 40% используют особую, отличающуюся технику, которая будет называться типом "B". Остальные используют одну или другую особую, отличающуюся технологию, которые будут совместно называться типом "C". Для подробного анализа типа C не было получено достаточной испытательной информации, и обсуждение в данном описании будет ограничено более часто встречающимися типами A и B.
Во время испытаний наблюдали, что большая часть игроков используют только одну технологию, но меньшая часть иногда переключается между свингами типа B и типа A. В соответствии с этим техника более точно рассматривает характеристики свинга, чем характеристики игрока. Также наблюдали, что типы A и B проявляются в довольно аналогичных пропорциях у игроков с разными навыками в диапазоне от профессиональных игроков до начинающих любителей, что означает, что обе техники можно рассматривать аналогично совершенными. Кроме того, наблюдали, что эти две техники не могут быть смешаны в индивидуальных совершенных свингах между этими двумя типами, идеальная техника будет либо типом A, или типом B.
Хотя это еще не было окончательно доказано, вероятно, что тип A содержит комбинацию вращательных и поступательных движений, которые в основном выполняются в передней плоскости, всегда в направлении на цель. Тип B также, вероятно, содержит комбинацию вращательных и поступательных движений, которые в основном выполняются в передней плоскости, но в данном случае с началом движения всех сегментов в направлении на цель и с последующим переключением на действия цепового типа одного из сегментов снова в основном в передней плоскости, причем его проксимальный конец замедляется для повышения ускорения его дистального конца.
Хотя высокоскоростная составная сущность этих движений трудно поддается визуализации, их эффекты могут быть представлены совершенно ясно при измерении сил реакции земли, когда наблюдают, что полученная в результате вертикальная, направленная вниз сила, обычно называемая центром давления (COP, ЦД), движется строго в направлении передней плоскости, либо к или от цели.
Совершенный свинг, в котором используется техника типа A, начинается с линейного движения COP вправо, от цели, изменяя направление движения на обратное в определенной точке между приблизительно BS180° до DS180°, переходя в более длинное линейное движение этих сегментов влево в направлении цели, которое продолжается до удара. Линейные движения частично независимы от угловых положений свинга. Испытания показали, что техника типа A позволяет развить большую сгенерированную энергию и обеспечить ее передачу, когда COP проявляет большее линейное ускорение и скорость в направлении цели во время более длительного движения в направлении к цели, и также в случае, когда длина такого линейного движения в направлении цели увеличивается.
Совершенные свинги при использовании техники типа B начинаются с аналогичного линейного движения COP вправо, от цели, снова с изменением направления движения на обратное в некоторой точке между приблизительно BS180° и DS180°, переходя в линейное движение влево, в направлении цели, но на гораздо меньшее расстояние, чем это происходит при типе A. Линейное движение затем снова изменяют на направление движения вправо от цели, которое продолжается до удара. Такое второе изменение направления на обратное обычно происходит приблизительно в DS180°, хотя это может произойти до DS180° или может достигать почти DS90°. Различные линейные движения, вероятно, являются менее независимыми от угловых положений свинга, чем в случае свингов типа A. Испытания показали, что техника типа B позволяет развить большее генерирование энергии и ее передачу, когда COP проявляет большее линейное ускорение и скорость в направлении цели во время второго линейного движения, которое направлено на цель, и также в ходе третьего линейного движения, которое направлено от цели. Вероятно, это имеет особое значение на ранних этапах этого третьего линейного движения. Расстояния, на которых эти ускорения прикладывают ко второму и третьему тактам, также существенны для генерирования и передачи больших количеств энергии.
Игрок может управлять несколькими аспектами цеповой операции S3-S4, включая в себя установку исходного угла фиксации между S3 и S4 и поддержание этого угла фиксации до момента высвобождения фиксации. По мере продолжения маха вниз возникает необходимость сопротивления силам инерции, которая вначале пытается тянуть S4 внутрь, и затем возникающим позднее центробежным силам, которые пытаются вытянуть S4 наружу. Игрок должен задерживать точку высвобождения фиксации, выходя за пределы начала возникновения таких вытягивающих наружу центробежных сил. После высвобождения фиксации игрок должен продолжить непосредственно передавать энергию в S3 и S4 от своей локальной энергии. Правильная комбинация этих переменных может быть разной у разных игроков и может представлять собой комбинацию, которая обеспечивает достижение максимальной скорости рукоятки клюшки непосредственно перед ударом и достижение максимальной скорости головки клюшки непосредственно в точке удара. Неправильная комбинация типично приводит к тому, что максимальная потенциальная скорость головки клюшки возникает слишком рано или слишком поздно. Максимальная "потенциальная" скорость головки клюшки относится к максимуму, который мог бы быть достигнут, если бы мячик не замедлялся в результате удара.
Четыре группы мышц, ассоциированные с четырьмя сегментами упрощенной модели, на практике содержат намного большее количество мышц, которые действуют различными способами и с множеством диапазонов движения. Если их рассматривать как четыре упрощенные группы, анализ может быть упрощен до следующего. Каждая группа мышц действует на свой ассоциированный сегмент, обеспечивая силы, которые приводят к угловому и линейному ускорению сегмента. Работа выполняется по мере того, как силы перемещают сегменты, при этом генерируется энергия, как вращательная и линейная кинетическая энергия в сегменте. Обычно действие мышц выполняет наибольшую работу и формирует наибольшую энергию для передачи вверх по цепи, поддерживая максимальную силу в максимальном диапазоне движения.
Механически эффективное движение является важным для ускорения сегментов. Смещения и скорости должны меняться плавно и должны быть правильно направлены.
В идеальных свингах для игроков среднего типа тела группы мышц S1, S2, S3 и S4 составляют приблизительно 30-35%, 40-45%, 15-20% и 5-8% исходной локальной энергии, используемой для энергии свинга.
ЛОКАЛЬНЫЕ ЭНЕРГИИ И ПРАВИЛА ПОСЛЕДОВАТЕЛЬНОСТИ ЭНЕРГИИ
Тесты показали, что все более и более совершенная игра ближе всего следует общим правилам фиксации и запуска. Локальная группа мышц остается на низком уровне активации до тех пор, пока данный сегмент не высвободит фиксацию и не начнет запуск от проксимального сегмента, после чего он наращивает усилие и поддерживает относительно высокий уровень активации. Это заканчивается, и локальные мышцы снижают свою активность до низкого уровня активации, по мере того как дистальный сегмент высвобождает свою фиксацию и начинает запуск от данного сегмента.
Тесты также обозначили, что профессиональные или опытные игроки обычно следуют этим правилам во всех сегментах, за исключением S3, когда при совершенной игре группа мышц S3 продолжает активацию после высвобождения фиксации сегмента S4. Такой компромисс в отношении правил, вероятно, приводит к относительно длинному расстоянию движения группы S3 во время маха вниз и из-за его относительной силы по сравнению с более слабой группой мышц S4. Тесты также показали, что начинающие игроки типично не соответствуют правилам в большей части их махов вниз, у них происходит наложение активации различных групп мышц. Совершенная игра отображает быстрое возбуждение до высоких уровней активации, после чего следует быстрое снижение активности, когда дистальный сегмент входит в последовательность. Плохо подготовленная игра типично отображает низкие уровни активации, поддерживаемые в течение длительного времени наложения активаций проксимальных и дистальных групп мышц.
Для опытных игроков группа мышц S1 активируется из TOB-4 и может типично оставаться на высоком уровне активации в течение приблизительно 100 мс. Группа мышц S2 активируется, когда происходит расслабление S1, и может типично оставаться на активированном уровне приблизительно 70 мс. Аналогично, группа мышц S3 активируется, когда S2 снижает свою активность, и может типично оставаться на активном уровне приблизительно около 80 мс. Группа мышц S4 активируется, пока S3 остается активным, и типично может оставаться на активном уровне приблизительно около 20 мс.
Мышцы в пределах подсегментов сегмента S2 эффективно фиксируются и выполняют запуск друг от друга, при этом мышцы верхней части туловища дополнительно гибко поддерживаются вдоль цепи, в отличие от мышц нижней части туловища. Мышцы в сегменте S3 содержат группы мышц плеч и локтей, при этом левый локоть находится дальше вдоль цепи, чем левое плечо, и правый локоть находится дальше вдоль цепи, чем правый локоть. Такие наборы поддерживающих подсегментов подвергаются тем же условиям фиксации и начала запуска и правилам, и во время профессионального свинга группа мышц проксимального подсегмента должна закончить свою активацию перед группой мышц проксимального подсегмента. Такие последовательности работы подсегментов являются желательными. Это обычно проявляется во время свинга, выполняемого профессиональными и опытными игроками, и обычно отсутствует у начинающих игроков.
Испытания показали, что последовательность обычно не присутствует в подсегментах S1. Вероятно, это связано с доминирующим положением мощных мышц в области бедер-таза, которые, хотя и находятся наиболее удаленно от цепи подсегментов от земли до таза, активно используются с начала инициирования маха вниз.
Для активации каждой группы мышц наиболее эффективно использовать максимальное количество энергии, и энергия будет подана в систему путем как можно более быстрого возбуждения мышц до высокого уровня их активации, с поддержанием на как можно более высоком уровне в течение доступного оптимального смещения сегмента, с последующим снижением активности снова, настолько быстро, насколько это возможно. Генерирование энергии происходит во время выполнения работы, что требует обязательного смещения сил, образующихся мышцами. Такое смещение возникает при движении сегмента. Хотя движение сегмента относится к длительности времени, когда мышцы остаются активированными на высоком уровне, более важные переменные локального генерирования энергии представляет собой сила группы мышц и смещение сегмента на активированном уровне, чем время нахождения на активированном уровне.
Из предыдущего описания понятно, что мах вниз от TOB-1 до удара содержит чрезвычайно критичную последовательность действий для генерирования энергии, которые должны быть выполнены очень точно, если требуется сгенерировать максимальную энергию и передать ее на головку клюшки. Любые задержки последовательности приводят либо к нарушениям правила фиксации или уменьшают длительность времени, в течение которого силы мышц могут быть приложены для смещения сегментов. Идентификация и понимание такой последовательности энергии являются ключом для научного анализа и улучшения свинга в гольфе.
Следует отметить, что идентификация фиксации, правила фиксации и правила последовательности энергии для оптимального генерирования и передачи энергии представляют собой новые раскрытия, сопровождающие настоящее изобретение.
Также следует отметить, что несколько биомеханических исследований предшествующего уровня техники определили, что скорости сегментов часто достигают пика в проксимальной-дистальной последовательности идеальных свингов в гольфе, хотя ни одно из них не оказалось способным предложить какую-либо убедительную причину, почему так должно происходить. В некоторых из способов тренировки предшествующего уровня техники делали попытку использования таких наблюдений, но сталкивались с трудностями, состоящими в том, что они дают только боковой эффект одного аспекта фундаментальных, лежащих в основе механизмов, и что некоторые совершенные свинги проявляют проксимальную-дистальную последовательность скорости, в то время как другие относительно совершенные свинги не проявляют ее. Однако из настоящего раскрытия следует, что ключевая, лежащая в основе последовательность представляет собой последовательность генерирования энергии и причины в этом частично возникают из-за учета фиксаций и начала запуска. Правильное понимание общих, лежащих в основе механизмов является существенным для правильного анализа и улучшения.
На фиг. 3 показана блок-схема, представляющая эти принципиальные последовательности генерирования локальной энергии во время маха вниз. Крупные прямоугольники представляют периоды высокого уровня локальной энергии, сегмента или подсегмента, обозначенные аббревиатурой, показанной в прямоугольнике. Прямоугольники, помеченные как "RU", обозначают повышение активности c низкого на высокий уровень активации локальной энергии сегмента или подсегмента, показанного в следующем прямоугольнике. Прямоугольники, помеченные как "RD", обозначают снижение активности с высокого на низкий уровень активации локальной энергии сегмента или подсегмента, показанного в предыдущем прямоугольнике. Последний прямоугольник, помеченный как "IMP", относится к событию удара. Тесты показали, что такая, возможно, неожиданно усложненная последовательность активации локальных мышц в основном достигается у большей части очень опытных игроков. Кроме того, она достигается во время немного большего периода движения вниз в свинге, чем за полсекунды. Очень небольшая часть отдельных последовательностей достигается начинающими игроками.
СУЩНОСТЬ ПАРАМЕТРОВ ЭНЕРГИИ, ПРАВИЛ ОПТИМИЗАЦИИ И ОПТИМАЛЬНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ
Параметры энергии, описанные в предыдущих параграфах, кратко сведены в следующем списке:
- Моменты времени начала и завершения активации локальной энергии/сил сегмента и подсегмента.
- Моменты времени начала и завершения снижения активности локальной энергии/сил сегмента и подсегмента.
- Магнитуды и длительности активации локальной энергии/сил сегмента и подсегмента, включающие в себя средние и пиковые значения.
- Моменты времени и характеристики перехода фиксации между соединенными сегментами.
- Моменты времени и характеристики перехода высвобождения фиксации между соединенными сегментами.
- Уровни и моменты времени пиковых значений линейной и угловой кинетической энергии сегмента.
- Угловые положения, скорости и ускорения тела и сегментов клюшки во время свинга, включающие в себя пиковые скорости и ускорения из-за смещения под действием локальных групп мышц.
- Линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения, в результате смещения локальных групп мышц.
- Абсолютные угловые положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения.
- Абсолютные линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения.
- Абсолютные скорости сегментов тела и клюшки, включающие в себя абсолютную скорость головки клюшки.
- Угловые положения, скорости и ускорения между сегментами туловища и рук и между сегментами рук и клюшки.
- Моменты времени и переходные характеристики событий достижения верхнего положения замаха для сегментов тела и клюшки.
- Магнитуды углов между различными соединенными сегментами в событиях верхнего положения во время замаха.
- Моменты времени максимального растяжения-сокращения мышц между различными соединенными сегментами.
- Магнитуды углов между различными соединенными сегментами во время максимального растяжения-сокращения мышц между этими сегментами.
- Передача фиксации кинетической энергии, определенная как передача от одного сегмента к другому вдоль цепи путем фиксации данного сегмента относительно ускоряющегося проксимального сегмента таким образом, что данный сегмент ускоряется вместе с проксимальным сегментом под действием энергии, генерируемой или существующей в проксимальном сегменте.
- Передача запуска кинетической энергии, определенная как передача из проксимального сегмента в данный сегмент, когда происходит обмен моментом и передают кинетическую энергию, когда локальная энергия данного сегмента используется для запуска данного сегмента от проксимального сегмента.
- Передача метания кинетической энергии, определенная как передача под действием сил, перемещающих или вращающих плечевой сустав со стороны цели и выполняющих метательное движение дистальных сегментов по дуге, которое ускоряет дистальные участки.
- Цеповая передача кинетической энергии, определенная как передача в самый дистальный конец существующей кинетической энергии в двух соединенных сегментах, которые вращаются и перемещаются в одном направлении, где проксимальный сегмент и проксимальный конец дистального сегмента замедляются под действием центробежных сил, действующих на сегменты.
- Передача кинетической энергии из-за уменьшения радиуса, когда поворот игрока уменьшает угловой момент инерции тела в результате уменьшения эффективного радиуса вращения, вызывая ускорение более дистальных частей.
- Накопление потенциальной гравитационной энергии при замахе и в начале маха вниз.
- Преобразование потенциальной энергии гравитации в кинетическую энергию во время маха вниз.
- Накопление потенциальной энергии упругой деформации рукоятки клюшки во время маха вниз.
- Преобразование потенциальной энергии упругой деформации рукоятки клюшки в кинетическую энергию при махе вниз.
- Категория генерирования и передачи энергии вспомогательной передней плоскости.
- Характеристики генерирования и передачи энергии вспомогательной передней плоскости.
- Положения центра давления, скорости, ускорения и диапазон движения относительно параметров энергии передней плоскости.
Правила оптимизации, описанные в приведенных выше параграфах, кратко сведены в следующем списке:
- Сегменты и подсегменты должны достичь достаточной угловой скорости и ассоциированной кинетической энергии во время замаха для того, чтобы плотно скрутить сегменты в их верхнем положении замаха, так что при этом сегменты скручиваются в проксимальной-дистальной временной последовательности.
- Последовательное скручивание сегментов и подсегментов должно быть плавным и скоординированным.
- Степень скручивания между соединительными сегментами и подсегментами должна быть такой, чтобы обеспечивалось оптимальное растяжение-сокращение всех локальных групп мышц и также оптимальное упругое растяжение соответствующих частей тела.
- Когда они достигают верхнего положения замаха, каждый сегмент и подсегмент должен быстро изменять направление поворота с замаха на мах вниз.
- Мах вниз начинается с наиболее проксимального сегмента, который получает энергию от своей локальной группы мышц.
- Локальная группа мышц наиболее проксимального сегмента должна активироваться до более высокого уровня активации настолько быстро, насколько это возможно.
- Все другие сегменты и подсегменты начинают свое движение при махе вниз, которое начинается из их верхних положений во время замаха, будучи зафиксированными в формации проксимальной-дистальной цепи с наиболее проксимальным сегментом, и все они получают энергию от локальной группы мышц наиболее проксимального сегмента.
- Когда сегменты и подсегменты начинают свое движение во время маха вниз, будучи зафиксированными в формации цепи с наиболее проксимальным сегментом, локальные группы мышц этих сегментов и подсегментов, дистальные для наиболее проксимального сегмента, в случае необходимости, оптимально дополнительно растягиваются-сокращаются и упруго растягиваются. Это дополнительное оптимальное растяжение-сокращение и упругое растяжение, выполненное в каждом сегменте или подсегменте, позволяет достичь такой же скорости, что и у его проксимального соседа в цепи.
- Кроме места, где локальная группа мышц сегмента или подсегмента существенно более мощная, чем ее дистальный сосед, сегмент или подсегмент заканчивает свое основное локальное генерирование энергии перед тем, как дистальный сегмент будет запущен относительно него.
Следовательно, дистальный сегмент или подсегмент начинает свой запуск после того, как его проксимальный сосед достигнет максимальной скорости.
Сегмент или подсегмент должен высвобождать фиксирование от своего проксимального соседа перед началом запуска от него.
- Локальная группа мышц каждого сегмента и подсегмента должна оставаться на низком уровне активации до тех пор, пока данный сегмент не высвободится от и не начнет запуск от проксимального сегмента, после чего он активируется до высокого уровня и поддерживает этот высокий уровень активации. (В случае группы мышц наиболее проксимального сегмента это, конечно, начинается с самого начала маха вниз.) Это заканчивается, и локальные мышцы снижают активность до низкого уровня активации, когда дистальный сегмент высвобождает фиксацию от и начинает запуск от данного сегмента. Исключение из правила состоит в том, что группа мышц сегмента руки продолжает активацию после начала запуска сегмента клюшки, из-за того что группа мышц сегмента руки существенно более сильная, чем группа мышц в сегменте клюшки.
- Локальная группа мышц сегментов и подсегментов должна повышать и снижать свою активность между высоким и низким уровнями активации, настолько быстро, насколько это возможно.
- Когда она повышает свою активность до более высокого уровня активации, группа мышц каждого сегмента и подсегмента должна поддерживать более высокий оптимальный уровень активации для как можно более быстрого ускорения сегмента до требуемой максимальной скорости. Группа мышц должна снижать активность до низкого уровня как можно быстрее после того, как сегмент достигнет требуемой максимальной скорости.
- Уровни активации энергии и требуемые скорости сегмента должны изменяться в соответствии с требованиями свинга. Они должны быть оптимально максимизированы, когда требуется максимальная скорость головки клюшки во время свинга, и оптимально уменьшены, когда требуется более низкая скорость головки клюшки.
- Движения сегмента и подсегмента должны выполняться плавно и с оптимальной механической эффективностью. Линейные движения должны осуществляться в оптимальных, механически эффективных направлениях, и угловые движения должны происходить вокруг оптимальных, механически эффективных осей.
- Оптимальный угол фиксации должен быть установлен между сегментами руки и клюшки в начале маха вниз этих сегментов, что способствует оптимальной цеповой передаче энергии между этими сегментами, когда они высвобождают фиксацию позже во время маха вниз. Такой угол может находиться между 60° и 70°.
- Оптимальный угол фиксации между сегментами руки и клюшки поддерживается до точки во время маха вниз, где высвобождение фиксации обеспечивает последующую максимизацию скорости головки клюшки, и достигает этой максимальной скорости во время удара.
- Для свингов, в которых требуются высокие скорости головки клюшки, оптимальный угол фиксации между сегментами руки и клюшки поддерживается до точки во время маха вниз, где высвобождение фиксации обеспечивает достижение сегментом клюшки максимальной угловой скорости непосредственно перед ударом, что позволяет использовать высвободившуюся энергию растяжения изогнутой рукоятки клюшки для ускорения головки клюшки с последующим обеспечением максимальной ее скорости и для достижения максимальной скорости в момент удара.
- Генерирование энергии во вспомогательной передней плоскости и ее передача должны быть разделены по категориям как один из нескольких типов, которые не смешиваются друг с другом. Испытания показали, что можно выделить один наиболее общий тип, один умеренно общий тип и, по меньшей мере, один другой нехарактерный тип. Умеренно общий тип проявляет обратно направленное движение при линейном движении центра давления от направления цели, что отсутствует в самом общем типе.
- В общем типе генерирование и передача энергии во вспомогательной передней плоскости происходят без обратного движения центра давления, когда для свинга требуется максимальная скорость головки клюшки, игрок должен двигаться таким образом, чтобы длина линейного движения его или ее центра давления в направлении цели была максимальной и чтобы он имел максимальную линейную скорость.
- При общем типе генерирования и передачи энергии во вспомогательной передней плоскости с обратным движением центра давления, в случае когда для свинга требуется максимальная скорость головки клюшки, игрок должен двигаться таким образом, чтобы его или ее траектория движения центра давления вначале имела максимальную линейную скорость в направлении цели и затем максимальную линейную скорость в обратном направлении от направления к цели.
Следует отметить, что множество индивидуальных правил оптимизации содержат новые раскрытия, представленные в настоящем изобретении, в частности те, которые относятся к последовательностям генерирования энергии, фиксации и запуска. Продолжение исследований и испытаний может привести к составлению дополнительных правил или может стимулировать пересмотр некоторых правил, представленных в настоящее время. Также возможно улучшение полных списков параметров энергии и правил оптимизации.
Различные параметры энергии и связанные с ними события для типичного оптимального свинга представлены ниже в виде одиночной последовательности вместе с эталонной структурой угловых положений и типичных моментов времени рукоятки клюшки, в которые они происходят. Такие моменты времени представлены в круглых скобках как секунды перед ударом и секунды после удара. Параметры энергии вспомогательной передней плоскости не включены в последовательность, поскольку они являются различными для разных типов свинга, и у них также изменяются положения в структуре угловых положений рукоятки клюшки, как было описано выше.
Данная последовательность представляет идеализированный свинг. Сокращение "CH" относится к головке клюшки. "S2a" и "S2b" относятся к локальным группам мышц, связанным с нижним и верхним подсегментами S2. "S3a" и "S3b" относятся к локальным группам мышц плеча и локтя, ассоциированным с подсегментами S3. Следует отметить, что, хотя они показаны вместе в последовательности, наборы подсегментов для левой и правой руки имеют отдельные последовательности движения.
1. BS90° (-0,728 с)
2. BS135° (-0,613 с)
3. BS180° (-0,541 с)
4. TOB-1
Активация локальной энергии S1
5. TOB-2
Начинается вращательная фиксация S1-S2
6. TOB-3
Начинается вращательная фиксация S1-S2-S3
7. TOB-4 (-0,271 с)
Начинается вращательная фиксация S1-S2-S3-S4
8. Растяжение S1-S2
Полное скручивание вращательной фиксации S1-S2
9. Растяжение S2-S3
Полное скручивание вращательной фиксации S1-S2-S3
10. Растяжение S3-S4
Полное скручивание вращательной фиксации S1-S2-S3-S4
11. Максимальная угловая скорость S1
12. Заканчивается вращательная фиксация S1-S2
Снижение активности локальной энергии S1
Активация локальной энергии S2a
Начало передачи энергии из S1 в S2a
13. Заканчивается вращательная фиксация S2a-S2b
Происходит активация локальной энергии S2b
Снижение активности локальной энергии S2a
Начало передачи энергии из S2a в S2b
14. Максимальная угловая скорость S2b
15. Заканчивается вращательная фиксация S2b-S3a
Снижение активности локальной энергии S2b
Активация локальной энергии S3a
Начало передачи энергии из S2b в S3a
16. DS180° (-0,100 с)
17. Максимальная угловая скорость S3a
Активация локальной энергии S3b
Снижение активности локальной энергии S3a
Начало передачи энергии из S3a в S3b
18. Вращательная фиксация S3b-S4 заканчивается
Начинается цеповая передача в S4 и CH
Начинается замедление S3
Начало передачи энергии из S3 в S4
Происходит активация локальной энергии S4
19. DS135° (-0,072 с)
20. DS90° (-0,047 с)
S3b Происходит снижение активности локальной энергии
21. DS45° (-0,018 с)
22. Происходит снижение активности локальной энергии S4
23. Максимальная угловая скорость энергии S4
Энергия упругой деформации рукоятки преобразуется в CH
24. Максимальная абсолютная скорость удара CH (0,000 с)
25. FT45° (+) (+0,028 с)
ИЗМЕРЕНИЕ
В предпочтительном варианте воплощения изобретения свинг измеряют или детектируют с помощью системы или устройства и его параметры энергии измеряют или рассчитывают.
Существуют различные способы, известные в предшествующем уровне техники, которые можно использовать для измерения движений тела и клюшки, ассоциированных со свингом в гольфе, включающие в себя движения сегментов или суставов тела. Наиболее успешные и часто используемые способы этого типа представляют собой оптические системы захвата движения и электромагнитные системы захвата движения.
В типичной оптической системе захвата движения пассивные отражающие цели устанавливают в критических точках на теле игрока и на клюшке. Положения этих целей отслеживают во время свинга, используя множество высокоскоростных камер, направленных на игрока из разных положений. Эта система имеет два конкретных преимущества. Она имеет высокую точность, и цели являются легкими и незакрытыми для игрока. Она также имеет несколько недостатков, которые включают в себя следующие. Оборудование является очень дорогостоящим. Установка является обременительной. Система не позволяет выполнять работу в режиме реального времени и, таким образом, не может использоваться в интерактивном режиме. Ее оптическая чувствительность не позволяет использовать ее за пределами помещения. Проблемы могут возникать при использовании целей, скрытых от вида или запутанных в местах пересечения.
В типичной электромагнитной системе захвата движения на игрока надевают активные датчики в критических точках тела и на клюшке. Положения и ориентации этих датчиков отслеживают во время свинга в опорном электромагнитном поле, генерируемом с помощью передатчика. В одной версии системы датчики соединяют с помощью проводов с удаленным компьютером. В альтернативной версии датчики подключают по беспроводному каналу. Система имеет некоторые преимущества по сравнению с оптической системой захвата движения. Она не проявляет оптическую чувствительность, и ее можно использоваться вне помещения. Она позволяет выполнять работу в режиме реального времени. Такие датчики не обязательно должны находиться в пределах прямой видимости, и их невозможно спутать в местах пересечения. Хотя это оборудование является дорогостоящим, оно существенно менее дорогое, чем оборудование оптического типа. Система также имеет некоторые недостатки по сравнению с оптическим типом системы. Датчики неудобны для игрока и могут влиять на выполнение свинга, в частности, в случае версии с подключением по проводам. Беспроводные цели требуют источника питания, который может потребовать замены или перезарядки. Система является менее точной, в частности, в случае беспроводной версии. Могут возникать проблемы с помехами для сигналов, создаваемыми металлическими клюшками. Система не всегда способна точно измерять параметры очень быстрого свинга.
Как оптической системе, так и электромагнитной системе присущи следующие недостатки. С ними может работать только квалифицированный персонал. Цели могут быть установлены неправильно или непоследовательно на теле игрока или на клюшке. Для надевания и съема целей требуется затратить некоторое время и усилия. Цели должны быть надеты на все клюшки, используемые в системе.
Другие системы захвата движения известны в предшествующем уровне техники, включающие в себя системы, в которых используются датчики, содержащие акселерометры или гироскопы, установленные на тело игрока и на клюшку. Наиболее успешные из них аналогичны электромагнитной системе, описанной выше, и имеют аналогичные преимущества и недостатки.
Все эти системы имеют дополнительный недостаток, состоящий в том, что они ограничены измерением движений тела. Дополнительное средство требуется для измерения сил, выполненной работы или генерируемой работы. Одно такое средство подразумевает использование соответствующим образом запрограммированного компьютера для моделирования сил и работы, выполняемой в теле, путем приписки массы и движений инерции сегментов тела и клюшки и используя движения тела и клюшки, измеряемые системой захвата движения, для управления соединениями и сегментами модели. Компьютер анализирует движение и определяет соответствующие силы и работу. Такие системы требуют существенной технической экспертизы со стороны пользователя и весьма маловероятно пригодны для использования тренерами или игроками. Такие системы известны в предшествующем уровне техники, и они будут называться "компьютерными андроидными моделями" везде в данном описании и в формуле изобретения.
Изобретение направлено на способ и устройство, которые позволяют преодолеть различные недостатки устройств измерения предшествующего уровня техники, описанных выше.
Хотя ее обычно не ассоциируют с измерением сегмента тела, информация, относящаяся к движению и к силам тела, также может быть получена по измеренным силам реакции земли. Существуют различные устройства, известные в предшествующем уровне техники, которые измеряют силы реакции земли, включающие в себя подушечки давления в стельках, подушки давления в коврике, на котором стоит игрок, и одиночные или двойные жесткие платформы, на которых стоит игрок, которые иногда называются пластинам силы. Подушки давления обычно содержат матрицу с большим количеством миниатюрных датчиков силы/давления. Обычно только они позволяют измерять вертикальные силы реакции земли.
Пластины силы обычно содержат жесткие прямоугольные платформы с датчиками силы, расположенными под угловыми областями. Их обычно используют для анализа равновесия и походки в медицинских или спортивных областях. Эти датчики обычно представляют собой датчики измерений деформации, пьезоэлектрические, емкостные или пьезорезистивные датчики. Пластины силы обычно содержат одну или две платформы. В случае когда используются две платформы, субъект размещает по одной ступне на каждой платформе. Такие пластины силы обычно измеряют либо вертикальные силы, или силы во всех трех направлениях XYZ в трехмерном пространстве, которые представляют собой вертикальные силы и боковые силы.
В US 7406386 раскрыто устройство, которое, как утверждается, полезно для очень широкого диапазона измерений давления, в диапазоне от ковриков для компьютерный мышей до поверхностей, на которых стоит субъект, что позволяет измерять силы реакции земли. Устройство содержит преднамеренно деформированную поверхность с множеством датчиков. Датчики детектируют локальные деформации или растяжения на поверхности и по своей сути отличаются от датчиков измерения нагрузки, использующихся в подушках давления и пластинах сил предшествующего уровня техники. Данные датчиков, полученные на основе этих локальных деформаций или растяжений, совместно комбинируют и совместно обрабатывают. Компьютерный алгоритм используется для обработки совместно подаваемых входных сигналов, которые получают из этих деформаций. Хотя в данном раскрытии предложено использовать нейронную сеть, как один из множества возможных типов алгоритмов, из раскрытия очевидно, что необходима сеть, которая работает на манер детерминистического алгоритма, а не сеть, которая работает с искусственным интеллектом. В данном раскрытии предложено использовать алгоритм для выполнения задачи отображения деформации на местоположение на поверхности, для получения результата, аналогичного способу, в соответствии с которым пластина силы преобразует сигналы нагрузки в место расположения центра давления. Предложенное использование такого устройства в качестве средства измерения сил реакции земли, которое могло бы конкурировать с коммерчески доступными пластинами силы, является неуместным, поскольку такие измерения требуют такого уровня точности и связности, которые не могут быть обеспечены с помощью раскрытого устройства. Устройство, основанное на детектировании деформаций поверхности, было бы непригодным по многим причинам, включающим в себя большие вариации входных сигналов, которые неизбежно возникли бы как при изменениях температур окружающей среды, так и из-за старения и износа поверхности детектирования.
ПРЕДПОЧТИТЕЛЬНЫЙ СПОСОБ И УСТРОЙСТВО
В предпочтительном варианте воплощения изобретения устройство в основном или исключительно получает информацию о свинге по измерениям сил реакции земли. В первом варианте данного выполнения измеряют вертикальные и боковые силы, и устройство содержит пластину силы с двумя платформами. Во втором варианте измеряют только вертикальные силы, и устройство снова содержит пластину силы с двумя платформами, хотя также можно рассмотреть использование компоновки высокоскоростной подушки давления, охватывающей обе ступни. Первый вариант имеет относительное преимущество, состоящее в более высокой точности. Второй вариант имеет относительные преимущества более низкой стоимости, более простой конструкции и потенциально уменьшенного веса и толщины.
Анализ пластины сил обычно подразумевает исследование движения центра давления, которое приблизительно соответствует легко понятной концепции движения центра масс или центра тяжести. Центр давления на пластину сил представляет собой расчетную точку, где измеренный результирующий вектор силы пересекает поверхность, на которой стоит субъект. Центр массы приблизительно соответствует центру давления для большинства усредненных движений человека, хотя это не соответствует выполняемому с высокой скоростью совершенному свингу в гольфе. Пластины силы с дополнительным измерением боковой силы также обычно используют для анализа крутящих моментов, эффектов удара и трения, все концепции которых легко понятны. За пределами этих в значительной степени субъективных исследований, которые подвержены интерактивному субъективному вмешательству контролера или эксперта, сигналы пластины силы обычно считаются слишком непонятными или сложными для вразумительного или полезного анализа человеком.
Аспект настоящего изобретения содержит понимание того, что в значительной степени более полезная информация может быть получена из измеренных сил реакции земли, которые могут быть получены с помощью обычных способов, и что это также относится к очень быстрым движениям, выполняемым во время свинга в гольфе. Более конкретно, настоящее изобретение содержит понимание того, что измеренные силы реакции земли включают в себя информацию, относящуюся к генерированию и передаче энергии при выполнении свинга в гольфе и включающую в себя параметры энергии, требуемые для анализа свинга в гольфе.
Дополнительный связанный аспект настоящего изобретения содержит понимание того, что такая полезная информация, полученная из измеренных сил реакции земли, может быть выделена путем использования средства искусственного интеллекта совместно со средством, которое измеряет силы реакции земли, таким как пластина сил или подушка давления. Связанный аспект изобретения содержит в понимании то, что средство искусственного интеллекта предпочтительно анализирует измеренные силы реакции земли после их обработки в данные, которые лучше характеризуют свинг.
На фиг. 4 показана блок-схема, представляющая последовательность этапов при обработке и детектировании информации во время свинга, используя средство искусственного интеллекта. Представленные сокращения, используемые на чертеже, приведены в скобках в следующем подробном описании. Силы реакции земли во время свинга (S, С) детектируют с помощью средства (DM, СД) детектирования. Информацию средства детектирования обрабатывают с помощью средства (EPM, СРО) ранней обработки в данные, которые лучше характеризуют свинг. Эти данные принимают с помощь средства (AIM, СИИ) искусственного интеллекта, которое обрабатывает или определяет параметры энергии свинга. Эти параметры энергии затем используют для выполнения анализа (A, А) свинга.
Искусственный интеллект, иногда называемый машинным интеллектом, содержит хорошо установленные категории систем обработки данных, используемые в виде способа, напоминающего интеллект человека, включающего в себя системы искусственной нейронной сети, системы эволюционных вычислений и гибридные интеллектуальные системы.
Системы искусственной нейронной сети, которые будут называться здесь нейронными сетями или сетями, представляют собой средство решения задачи, которое может работать с использованием способа, похожего на то, как человек решает задачу, хотя они также иногда используются более детерминистическим образом. Схожесть с решением задач человеком относится к использованию ранее изученного опыта, на основании которого решение может быть определено или интерполировано, когда возникает новая задача или ситуация. Нейронная сеть содержит взаимно соединенную группу искусственных нейронов, которая использует математическую или вычислительную модель для обработки информации с использованием подхода на основе соединения. Это предполагает использование сети простых элементов обработки или нейронов, которые могут проявлять сложное глобальное поведение, определяемое соединениями между элементами обработки и параметрами элемента. Информацию сохраняют как "веса" между нейронами. Эти веса тренируют путем представления входных и выходных структур в процессе контролируемого обучения.
В предпочтительном варианте воплощения изобретения система нейронных сетей используется для выделения соответствующей информации из сил реакции земли, измеряемых пластиной силы.
Можно использовать различные системы нейронной сети. Определили, что представленная ниже система хорошо работает при выполнении способов изобретения. Система сети содержит множество индивидуальных сетевых компонентов. Типичные сетевые компоненты содержат обычную многослойную искусственную нейронную сеть с прямой связью и с обратным распространением. Она имеет одиночный скрытый слой, содержащий приблизительно 30-70 нейронов, причем приблизительно 50, вероятно, составляет оптимальное количество. Тесты показали, что отсутствует существенное повышение рабочих характеристик при увеличении количества нейронов или скрытых слоев. Сигмоидальные функции передачи используются для входного слоя, что обеспечивает большой входной диапазон без доминирования экстремальных значений, и линейные функции передачи для скрытого и выходного слоев. Сети тренируют, используя контролируемое обучение, с помощью процессов, установлению которых способствуют ускоренные технологии обучения. Чрезмерно близкая подгонка предотвращается путем выбора наименьшего количества скрытых нейронов, которые позволяют получить хорошее обобщение. Тренированные сети тестируют на данных, которые полностью независимы от их тренировочных данных.
Хотя тренированные сети могут иметь множество выходов и, таким образом, производят обмен прогнозированием, во время испытаний определили, что более точные результаты получали с помощью отдельных сетей.
Данные из пластины сил отбирали с частотой выборки приблизительно 300 Гц и обрабатывали с получением соответствующих входных данных. Эти данные сглаживали с использованием обычных технологий фильтрации, таких как арифметическое скользящее среднее по одиннадцати точкам, перед подачей их в тренируемую сеть.
Важно использовать достаточно большую тренировочную выборку для обеспечения охвата ею всего диапазона вариаций свинга, который можно наблюдать среди измеряемых параметров. В этой выборке предпочтительно доминируют опытные игроки для обеспечения основного ядра оптимальных элементов параметров энергии, но начинающие игроки также требуются для обеспечения широкой вариации ошибок. Тесты показали, что достаточно точные прогнозирования сети могут быть получены с тренировочными выборками, содержащими всего лишь 50 разных игроков, при этом для каждого игрока получали выборки для приблизительно десяти свингов с клюшкой каждого типа. Все более и более точные результаты получают при увеличении размера выборки, и коммерчески используемые системы в идеале могут быть тренированы на свингах нескольких сотен игроков. Хотя сети позволяют достаточно точно прогнозировать характеристики свинга с клюшками, которые имеют промежуточную длину, до клюшек, на которых были тренированы сети, например прогнозирование результатов для клюшки айрон номер 8, используя сети, натренированные для клюшек айрон номер 7 и номер 9, определили, что улучшенная точность получается при использовании специализированных сетей для каждой длины клюшки. Дополнительная память для обработки и требования для обслуживания этих дополнительных сетей также вполне находятся в пределах возможностей современного электронного оборудования малой стоимости.
Испытания показали, что система работает намного более эффективно, когда необработанные сигналы из пластины силы предварительно обрабатывают в процессоре или в средстве ранней обработки с получением данных, которые лучше характеризуют свинг, перед их представлением в сети. Примеры такой ранней обработки включают в себя следующие:
a) сглаживание потока данных, такое как использование арифметического скользящего среднего;
b) масштабирование для получения сравнимых показаний между разными датчиками;
c) стабилизация температуры для исключения ошибок, возникающих при изменении температуры;
d) стабилизация напряжения для исключения ошибок, возникающих при изменении напряжения в системе;
e) преобразование в положения X и Y COP отдельных ступней или комбинации поперек обеих ступней;
f) преобразование в скорости X и Y COP отдельных ступней или комбинации поперек обеих ступней; и
g) преобразование ускорений X и Y COP отдельных ступней или комбинации поперек обеих ступней.
Такая обработка позволяет для сетей намного проще определять бесчисленное количество едва различимых наложенных друг на друга потоков информации, которые неотъемлемо получаются при измерениях сил реакции земли.
ОПРЕДЕЛЕНИЕ И РАСЧЕТ ПАРАМЕТРОВ ЭНЕРГИИ
Приведенные ниже условия и допущения используются в описании и в приложенной формуле изобретения для того, чтобы способствовать описанию способов, используемых для выделения параметров энергии. Как отмечено выше, параметры, которые непосредственно относятся к параметрам энергии, и которые получают для расчета или определения параметров энергии, также можно назвать "параметрами энергии". Входные и выходные данные, используемые во время тренировки сети и при последующем использовании сети при прогнозировании параметров новых свингов, могут называться "тренировочными входными параметрами" и "тренировочными выходными параметрами", входными данными приложения и выходными данными приложения соответственно. Термин "угловой/линейный" может использоваться для обозначения углового или линейного или углового и линейного соответственно движения, поскольку сегменты обычно проявляют угловые и линейные движения. Хронологическая последовательность переменной с течением времени при выполнении свинга или части свинга может называться "графиком", поскольку такая информация обычно представлена как график или диаграмма, когда ее изучает человек. Этот термин иногда используется для удобства в случае, когда информация фактически не представляется для использования человеком в формате графика, но используется в форме данных в процессоре. Направления в трех измерениях относительно свинга в гольфе могут называться направлениями "X", "Y" и "Z", при этом X представляет горизонтальное направление на цель, Y представляет горизонтальное направление, перпендикулярное X, и Z представляет вертикальное направление.
Три отдельных типа сетей раскрыты для выделения параметров энергии из входных данных пластины сил. Такие типы сетей будут называться "сетями прогнозирования временной последовательности", "сетями прогнозирования точки во времени" и "сетями прогнозирования сжатых данных". Данные, прогнозируемые с их помощью, аналогично будут называться "прогнозированием во временной последовательности", "прогнозированием точки во времени" и "прогнозированием сжатых данных". Они отдельно описаны в следующих параграфах.
Сеть прогнозирования временной последовательности используется для прогнозирования значений параметров, которые изменяются в ходе выполняемого свинга. Во время тренировки все входные данные подают как нормализованные значения, и выходные данные регистрируют при выполнении выборки в каждой точке времени. Нормализованное значение, например, представляет значение как пропорцию максимального значения. Когда фактические выходные данные последовательно представляют в тренируемую сеть, сеть прогнозирует число, сопоставленное с каждым набором входных данных, и в случае, когда тренировка была правильно выполнена, выходные данные будут равны или приблизительно равны наблюдавшимся во время тренировки в том, что сеть определяет как наиболее соответствующие аналогичные обстоятельства. Типично это приводит к получению графика временной последовательности, который будет содержать некоторую степень "шумов", таким образом, что график содержит частично случайные флуктуации из стороны в сторону вдоль общего пути, аппроксимирующего кривую. Эти шумы впоследствии удаляют или уменьшают с помощью процессора, либо путем сглаживания, или путем подгонки полиномиальной кривой в формате, который лучше всего соответствует формам, которые такая полученная фактическая кривая, наиболее вероятно, будет иметь, или используя комбинацию обоих подходов. Слишком сильное сглаживание может скрыть характеристики основных выходных параметров, в то время как слишком малое сглаживание может не позволить адекватно устранить шумы. Тесты показали, что сглаживание обеспечивает очень хорошие результаты в случае, когда фактические результаты плавно развиваются вдоль графика или хронологической последовательности, но результаты получаются менее точными в случае, когда график или хронологическая последовательность имеют относительно резкие пики или изгибы. Тесты показали, что намного лучше согласование прогнозируемых выходных данных, вокруг пиков или изгибов для фактических выходных результатов получают в результате подгонки прогнозируемых выходных данных по полиному, такому как полином третьего порядка. В случае когда специфические участки кривой представляют собой интерес, для них отдельно может быть выполнена подгонка с использованием таких полиномов. Например, для пиков кривых может быть отдельно выполнена подгонка для значений, превышающих 75% максимального значения.
Примеры типичного прогнозирования временной последовательности показаны как визуально представленные графики на фиг. 6 - фиг. 12. Они более подробно описаны ниже в данном описании. Пример необработанных и сглаженных результатов прогнозирования показан на фиг. 16. Более тонкая зазубренная линия C представляет необработанные результаты прогнозирования, и более толстая линия B представляет сглаженные результаты прогнозирования. На фиг. 16 показаны фактические результаты для прогнозируемой абсолютной скорости головки клюшки в ходе выполнения свинга со сглаживанием, автоматически выполненным с помощью электронного процессора.
Сеть прогнозирования точки во времени используется для прогнозирования времени событий свинга или параметров, которые могут быть определены как возникающие в определенные точки времени. Во время тренировки выполняют выборку всех вводимых входных данных и регистрируемых выходных данных в каждой точке времени. Поскольку существует только один ответ в корректной точке и малые ошибки в противном случае рассматриваются так же, как и крупные ошибки, предпочтительно используют "нечеткие" определения параметра. Пример этого представляет собой функция треугольного взвешивания. Определили, что соответствующей является функция взвешивания с пиком 1 и шириной 100 мс. Ширина 100 мс обеспечивает произвольный баланс между включением достаточного количества данных для обеспечения максимальной тренировки сети и поддержания точности времени параметра. При выборе 100 мс выборки, находящиеся на расстоянии 25 мс от правильного момента времени, получают половину веса выборки в правильный момент для параметра. Выборки, находящиеся на расстоянии 50 мс до или после фактического значения параметра, не получают какой-либо вес. Альтернативные функции взвешивания могут включать в себя трапецеидальные, гауссовы, колоколообразные и сигмоидальные функции, хотя определили, что треугольная является более или менее точной в системе, описанной в данном описании.
Когда эффективные выходные сигналы впоследствии представляют в тренируемую сеть, сеть прогнозирует числа для каждого набора входных данных, и продолжающееся обучение с фазы тренировки приводит к тому, что выходные данные проявляют тенденцию генерирования значений, расположенных ближе к единице, по мере того, как исследуемые точки времени приближаются к фактическому времени. В результате получают последовательность прогнозируемых данных с определенной степенью "шумов". Их сглаживают, используя, например, фильтр скользящего среднего значения и скользящее среднее по одиннадцати числам, причем точка во времени представлена как арифметическое среднее своего собственного значения и значения пяти результатов прогнозирования с обеих ее сторон. В случае когда сеть правильно настроена, типично получают одно пиковое значение с явно выраженным максимумом, которое принимают как результат прогнозирования для параметра. Если определяют, что для параметра получают результаты прогнозирования, которые не представляют собой четкий срез, например в случае, когда возникают случайные конкурирующие пики, или в случае, когда максимальный пик не представляет существенно центральное положение над другими меньшими пиками, которые скошены к одной стороне, используют более сложные способы для определения наиболее вероятного значения для параметра.
На фиг. 17 показан визуальный график типичного прогнозирования точки во времени для TOB-4 с использованием треугольной функции взвешивания, описанной выше. Пунктирная линия А представляет форму треугольной функции, используемой на фазе тренировки, причем ее вершина установлена во время TOB-4, которое известно для данного свинга по результатам независимого анализа захвата движения. Сплошная линия B представляет сглаженное значение, прогнозируемое тренируемой сетью. Можно видеть, что прогнозирование изменяется с течением времени, но пики проявляются строго в точке времени, близкой к фактическому времени, измеренному по результатам анализа захвата движения. Процессор идентифицирует пик на линии A и определяет одиночное прогнозируемое значение времени для этого события.
Входные данные для сетей прогнозирования временной последовательности и прогнозирования точки во времени нормализуют, включая в них значения времени и углов. Это может быть выполнено, например, путем назначения величин в диапазоне от нуля до единицы, соответствующих минимальному и максимальному значениям переменных.
Обычно определяют, что моменты времени специфичной точки на кривой прогнозированной временной последовательности могут быть более точно прогнозированы, как прогнозирование точки во времени. Например, время TOB-4 может быть более точно спрогнозировано как прогнозирование точки во времени, чем путем поиска экстремального углового положения рукоятки клюшки в верхнем положении маха вниз, при использовании прогнозирования временной последовательности угла рукоятки клюшки. Это можно ожидать, поскольку экспертиза, выполняемая сетью прогнозирования точки во времени, направлена на все обстоятельства, относящиеся к моментам времени TOB-4, в то время как экспертиза сети прогнозирования временной последовательности направлена на прогнозирование значений, которые возникают непосредственно в ходе выполнения свинга. Результаты обоих типов обработки могут быть скомбинированы для повышения общей точности результатов прогнозирования. Этот случай был представлен в только что описанном примере. Момент времени TOB-4, прогнозируемый в соответствии с прогнозированием точки во времени, можно использовать для более точного регулирования моментов времени пика по кривой, прогнозируемой по временной последовательности для угла рукоятки клюшки. Аналогично, форму кривой, окружающей прогнозируемый момент TOB-4, можно использовать для лучшего описания этого события, например, происходит ли оно как резкий пик или как медленно изменяющаяся плоская часть.
Сеть прогнозирования сжатых данных используется для прогнозирования параметров, для которых требуется информация в широком смысле для всего свинга или частей свинга, или если она относится к определенному моменту времени в ходе свинга, также требуется существенная информация для других моментов времени выполнения свинга. Примеры первого случая включают в себя разделение по категориям типа свинга или типа игрока. Примеры последнего включают прогнозирование момента времени удара.
В случае когда используется прогнозирование сжатых данных, входные данные характеризуют аспекты всего свинга или частей свинга. Например, входные данные могут содержать хронологический разворот информации, получаемой из выходных данных пластины силы или по результатам прогнозирования временной последовательности параметров во время свинга. Требование обработки такой информации состоит в том, что необходимо найти некоторый способ, с помощью которого данные могут быть удобно сжаты. Соответствующая и хорошо установленная форма сжатия данных должна представлять такие переменные по математическим функциям, как коэффициенты ряда Фурье, в котором частотные члены высокого порядка отбрасываются соответственно для формирования преобразования Фурье. Альтернативная, но аналогичная технология состоит в использовании вейвлет-преобразования. Вейвлет-преобразование представляет собой представление функции с помощью вейвлетов, которые представляют собой математические функции, используемые для разделения данной функции или непрерывного по времени сигнала на различные частотные компоненты. Вейвлет-преобразование может иметь преимущества по сравнению с обычными преобразованиями Фурье при представлении функций с разрывами и резкими пиками. Соответствующие преобразования, такие как преобразование Фурье или вейвлет-преобразование, будут просто называться "преобразованиями" в описании и в приложенной формуле изобретения.
Сеть тренируют с тренировочными преобразованиями, используемыми как входные данные тренировки, и тренировочной переменной, используемой как выходные параметры тренировки. Тренируемую сеть затем используют для прогнозирования выходных данных приложения для входных данных преобразования в приложении. Во время тренировки тренировочные входные данные могут содержать, например, обработанные данные из пластины сил, и соответствующие тренировочные выходные данные могут содержать, например, кинематические или кинетические данные тренировки, измеренные с помощью систем захвата движения. Тренировочные входные данные также могут содержать, например, данные, прогнозируемые по временной последовательности, из других сетей в системе на основе обработанных данных из пластины сил для свинга.
Подход для преобразования требует подачи намного большего количества входных данных в сеть, чем подход с прогнозированием точки во времени или прогнозированием временной последовательности, поскольку вариации каждой входной переменной среди входных параметров должны быть включены во все или в значимые части свинга. Это делает тренировку более длительной по времени, но те же преобразования можно использовать как входные данные для определенного диапазона различных сетей, прогнозирующих различные параметры энергии. После окончания тренировки другие сети могут легко и быстро работать на современных процессорах с малой стоимостью.
В альтернативном предпочтительном варианте воплощения используют прогнозирование сжатых данных для прогнозирования всех или большей части параметров свинга, включающих в себя параметры, которые могут быть спрогнозированы с использованием прогнозирования временной последовательности или прогнозирования точки во времени.
Сети с прогнозированием временной последовательности используют для непосредственного определения нормализованной вариации определенных параметров энергии во всех точках свинга, включающих в себя следующие:
- Магнитуды генерирования/активации локальной энергии/сил сегмента и подсегмента.
- Уровни линейной и угловой кинетической энергии сегмента.
- Абсолютные скорости сегментов тела и клюшки, включающие в себя абсолютную скорость головки клюшки.
- Угловые и линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга из-за смещения локальными группами мышц.
- Угловые и линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга.
- Угловые положения, скорости и ускорения между сегментами туловища и рук и между сегментами рук и клюшки.
- Характерная передача энергии типа A, B и C в передней плоскости.
Сети с прогнозированием точки во времени используются для непосредственного определения моментов времени, когда возникают определенные параметры энергии во время свинга, включающие в себя следующие:
- Начало и завершение активации и снижения активности локальной энергии/сил сегмента и подсегмента.
- Фиксация и высвобождение фиксации между соединенными сегментами и подсегментами.
- События верхнего положения замаха для сегментов тела и клюшки.
- Максимальное растяжение-сокращение мышц между различными соединенными сегментами.
- Моменты времени пиков генерирования локальной энергии в сегментах, подсегментах и в головке клюшки.
- Моменты времени пиков угловой/линейной скорости и ускорения в сегментах, подсегментах и в головке клюшки.
- Моменты времени пиков скорости и ускорения центра давления при передаче энергии во вспомогательной передней плоскости.
- Моменты времени начала и окончания характеристик вспомогательной передней плоскости.
При тренировке сетей входные параметры тренировки обычно содержат обработанные выходные данные пластины сил, и выходные параметры тренировки обычно содержат соответствующие результаты измерений или расчетные параметры свинга игрока. В большинстве случаев такие выходные параметры тренировки получают путем использования обычных высокоточных способов захвата движения в тщательно управляемых условиях. Компьютерные андроидные модели дополнительно используют для определения значений кинетической энергии сегмента и генерирования локальной энергии сегмента, также используя данные захвата движения. После того как свинг игрока будет полностью записан и проверен с использованием способа, пригодного для цифровой обработки, может быть выполнена работа по тренировке различных сетей, включающая в себя большие количества тренировочных итераций, выполняемых автоматически соответствующим образом запрограммированной системой. Большое количество различных сетей можно, таким образом, тренировать с незначительными дополнительными затратами времени человека и финансовыми затратами.
Некоторые из выходных параметров сетей, упомянутые выше, содержат параметры, которые теоретически могут быть рассчитаны друг из друга. Например, множество результатов прогнозирования точки во времени может быть определено по моментам времени пиков при прогнозировании временной последовательности. Однако, как упомянуто выше, эти данные являются более точно прогнозируемыми при прогнозировании точки во времени. Аналогичная ситуация относится к отдельному прогнозированию значений кинетической энергии и скорости сегмента. Дублирование также происходит в отдельных результатах прогнозирования сетью положения, скорости и ускорения сегментов, поскольку значения скорости и ускорения могут быть определены как первая и вторая производные по времени положения. Аналогично, положение или скорость могут быть определены с использованием однократного или двойного интегрирования ускорения относительно времени. Однако тесты показали, что такие параметры обычно являются более точно прогнозируемыми при использовании специальных тренированных сетей и отдельное прогнозирование обычно представляет собой предпочтительный способ.
Тесты, однако, показали, что некоторые параметры положения могут быть более точно прогнозированы путем интегрирования прогнозируемой скорости по времени и что некоторые параметры скорости могут быть более точно прогнозированы путем интегрирования прогнозируемого ускорения относительно времени. Эти параметры обычно относятся только к областям пиков или изгибов графиков или хронологических последовательностей. Причина этого, вероятно, состоит в том, что процесс интегрирования может обеспечить сглаживание шумов прогнозирования, при котором теряется меньше информации, чем при арифметическом сглаживании, используемом в процессах прямого прогнозирования. Наилучшие способы для конкретных вариантов применения могут быть установлены опытным путем.
События, характеризующие свинг типа A, B и C, легко адаптируются и могут быть включены в фазу тренировки, будучи непосредственно связанными с движением COP пластины сил, и легко детектируются тренировочными сетями при фактическом выполнении свинга. Однако большая часть данных COP может использоваться без необходимости прогнозирования сетью, либо путем непосредственного использования обработанных выходных данных из пластины сил или в результате расчета с помощью процессора по этим выходным параметрам. Такие параметры включают в себя положения COP во времени, магнитуды, скорости, ускорения и длину смещения.
Как упомянуто выше, сети прогнозирования сжатых данных используются для прогнозирования параметров, для которых требуется информация в широком смысле по всему свингу, или если они относятся к определенному моменту в свинге, также требуется значительный объем информации из других моментов времени свинга. Их используют для непосредственного определения следующих параметров:
- Категория типа свинга, типы A, B, C и другие.
- Вес тела игрока.
- Категория типа тела игрока.
- Категория клюшки, которой играют от драйвера до вейджа.
- Моменты времени удара и уноса.
- Длительность времени между компонентами соответствующих событий времени, включающими в себя TOB-1, TOB-2, TOB-3 и TOB-4; длительность между пиковыми кинетическими энергиями сегмента и длительность между активациями локальной энергии.
- Категории нормализованных форм пика или изгиба, возникающие в специфические события в хронологической последовательности.
- Коэффициенты масштабирования для нормализованных значений прогнозируются другими сетями. Они включают в себя угловые и линейные положения, скорости и ускорения. Они также включают в себя силы, значения кинетической энергии и локальной энергии. Кроме того, они включают в себя коэффициенты масштабирования для характеризующих событий для типов свинга A, B и C.
В предпочтительном варианте воплощения, в случае когда пластины сил измеряют боковые силы, а также вертикальные силы, следующие обрабатываемые входные параметры сети используются как основной набор входных параметров для сетей и будут называться "основным" набором входных параметров пластины сил. Их используют отдельно для получения исходного прогнозирования сжатых данных для моментов времени уноса и удара, которые затем используют для прогнозирования входных данных "маркера времени". Входные данные маркера времени назначают нормализованное число от 0 до 1 для всех моментов времени выборки, используемых в других сетях. Например, параметру, выборка которого была получена на полпути выполнения свинга, назначают входной параметр маркера времени со значением 0,5. Основной набор входных параметров содержит следующие:
- Силы X, Y и Z из каждого положения восьми датчиков.
- Положение COP в направлении X для левой ступни, правой ступни и для комбинации обеих ступней.
- Положение COP в направлении Y для левой ступни, правой ступни и для комбинации обеих ступней.
- Скорость COP в направлении X для левой ступни, правой ступни и для комбинации обеих ступней.
- Скорость COP в направлении Y для левой ступни, правой ступни и для комбинации обеих ступней.
- Ускорение COP в направлении X для левой ступни, правой ступни и для комбинации обеих ступней.
- Ускорение COP в направлении Y для левой ступни, правой ступни и для комбинации обеих ступней.
Различные сети были испытаны для определения относительной важности этих входных параметров для получения точности прогнозирования, и определили, что большая часть сетей реагируют аналогичным образом. В случае когда это используется, определили, что входные данные маркера времени оказывают наибольшее влияние на входные данные. Определили, что скорость COP для правой ступни в обоих направлениях X и Y оказывает следующее наибольшее влияние на точность. Положение COP для комбинации обеих ступней в обоих направлениях X и Y также является важным. Все силы в направлениях X, Y и Z в положениях отдельных датчиков были определены как важные. Ускорения COP для обеих ступней и во всех направлениях представляют параметры, оказывающие наименьшее влияние среди описанного выше набора, и их исключение приводит только к незначительному уменьшению точности прогнозирования.
В предпочтительном варианте воплощения, в случае когда пластина сил не измеряет боковые силы, количество входных параметров сети пластины сил в основном наборе сокращается до шестнадцати, поскольку отсутствуют входные данных для силы X и Y из положений восьми датчиков.
Некоторые из выходных данных из некоторых результатов прогнозирования сжатых данных используют как входные данные для других сетей, включающих в себя другие сети прогнозирования сжатых данных. Большая часть сетей обеспечивает большую точность прогнозирования, если ее тренируют с использованием входных данных, включающих в себя маркер времени и идентификацию типа клюшки, типа тела игрока и типа свинга A, B или C.
Типичные примеры результатов из некоторых основных сетей прогнозирования временной последовательности показаны на приложенных чертежах 6-12. Эти сети тренировали с использованием основного набора входных параметров пластин сил, включающих в себя боковые силы X и Y. Все из показанных примеров представляют собой реальные примеры, представляющие результаты прогнозирования сети для действительно выполненных свингов с использованием клюшек-драйверов, совершенно отдельно от процесса тренировки. На вертикальной оси показано нормализованное значение переменной так, что ее пиковое значение представлено значением 1 и ее минимальное значение представлено значением 0. По горизонтальной оси показано время после события уноса в секундах. Фактическое значение, измеряемое системой захвата движения, представлено пунктирной линией A. Обработанное прогнозируемое значение в том виде, как оно было спрогнозировано сетью, представлено сплошной линией B.
На фиг. 6 представлено прогнозируемое угловое положение таза (S1) с течением времени. На фиг. 7 показана прогнозируемая угловая скорость таза (S1) с течением времени. На фиг. 8 показано прогнозируемое угловое положение плеч (S2) с течением времени. На фиг. 9 представлена прогнозируемая угловая скорость плеч (S2) с течением времени. На фиг. 10 показано прогнозируемое угловое положение рукоятки клюшки (S4) с течением времени. На фиг. 11 показана прогнозируемая угловая скорость рукоятки клюшки (S4) с течением времени. На фиг. 12 показана прогнозируемая абсолютная скорость головки клюшки с течением времени.
Из этих графиков сразу ясно, что система позволяет прогнозировать параметры с отличной точностью. В большинстве случаев линии A и B, по существу, совпадают друг с другом, обозначая очень высокие уровни точности для большинства свингов. Следует отметить, что эти два графика, конечно, были получены с использованием совершенно независимых способов. Кроме того, на графиках можно видеть, что "фактически" измеренные результаты также иногда представляют шумы, которые не являются истинным отражением фактического свинга. Это наиболее заметно на ранних этапах фиг. 7 и фиг. 9, где линия А проявляет значительную нестабильность, которая не присутствовала бы при фактическом выполнении движения. Можно видеть, что этот шум был удален в результате прогнозирования, показанного линией B. Когда такое происходит, результат прогнозирования фактически локально является наиболее точным, чем результаты захвата движения.
Также из графиков можно видеть, что линии А и B проявляют наибольшее расхождение в случае, когда возникают максимальные или минимальные пики. В представленных примерах такие расхождения наиболее заметны на фиг. 11 и фиг. 12. Такие расхождения возникают в точках на графиках, которые являются менее типично характерными, чем общий формат графика, и, таким образом, в худшей степени были обработаны сетью, тренированной для построения всего графика. Как отмечено ранее, эти пики или изгибы могут быть отрегулированы до высокого уровня точности путем применения результатов сетей прогнозирования точки во времени и сетей прогнозирования сжатых данных, которые, в частности, натренированы в отношении конкретного пика или изгиба. Первые точно размещают точку во времени, в которой возникает пик или изгиб. Последние точно идентифицируют категорию формы, соответствующей пику или изгибу. Пики и изгибы также могут быть более точно представлены при применении более высоких частот выборки в соответствующей области графика и используя специально адаптированные способы подгонки кривой.
На фиг. 13, 14 и 15 показано влияние различных типов входных параметров результатов прогнозирования для типичного примера углового положения рукоятки клюшки (S4). На трех фигурах показаны результаты прогнозирования для одного и того же свинга, выполненного клюшкой-драйвером. На фиг. 13 входные данные содержат полный основной набор входных параметров пластины сил, включая боковые силы, на фиг. 14 входные параметры содержат полный основной набор входных параметров пластины сил, но без боковых сил, и на фиг. 15 входные параметры содержат только входные параметры для сил X, Y и Z для положений всех восьми датчиков на пластине сил.
Из графиков можно видеть, что фиг. 13 представляет прогноз с наибольшей точностью, на фиг. 14 показан прогноз с несколько меньшей точностью и на фиг. 15 представлен прогноз со значительно меньшей точностью. На этой основе можно сделать вывод, что обработка прямых выходных данных пластины сил для получения более полного набора входных параметров сети для пластины сил обеспечивает очень существенное повышение точности и такие дополнительные входные параметры предпочтительно включают в анализ, поскольку для их включения требуются незначительные затраты или усилия при дополнительной обработке. Также можно сделать вывод, что хотя на фиг. 14 представлены менее точные результаты, чем на фиг. 13, тем не менее, она все еще обеспечивает достаточно высокий уровень точности. Поэтому можно представить предпочтительный вариант выбора в случае, когда стоимость, размеры и вес пластины сил представляют собой существенные учитываемые характеристики, поскольку пластины сил без измерения боковых сил требуют меньших производственных затрат и потенциально они выполнены более тонкими и более легкими, чем пластины, которые также должны измерять боковые силы.
На фиг. 16 показан типичный фактический пример выхода прогнозирования перед и после выполнения сглаживания. Линия C представляет относительно зашумленный, необработанный результат прогнозирования. Линия B представляет сглаженный результат прогнозирования. В этом примере представлено абсолютное значение скорости головки клюшки для свинга, выполняемого клюшкой-драйвером.
Различные данные параметров энергии, включающие в себя прогнозируемые данные, обрабатывают при подготовке их следующего этапа использования. Коэффициенты масштабирования применяют для нормализованных данных, для преобразования их в действительные значения. Прогнозирование точки во времени и прогнозирование сжатия данных используют для регулирования прогнозирования временной последовательности, для повышения его точности и для квалификации условий, окружающих специфичные события.
В предпочтительном варианте воплощения автоматически анализируют параметры энергии, хотя они также могут быть подготовлены для представления человеку, например для использования их экспертами, при разработке автоматического анализа данных или для непосредственного использования тренерами для непосредственного анализа свинга игрока.
АНАЛИЗ
Различные категории техники используются для автоматического анализа и оценки параметров энергии. Они включают в себя:
a) Анализ и оценку в свете правил оптимизации.
b) Анализ и оценку путем сравнения со свингом опытных игроков.
c) Анализ и оценку путем использования способа относительной зашумленности.
d) Анализ и оценку путем сравнения с другими свингами того же игрока.
e) Анализ и оценку на основе безопасности для здоровья.
Все эти категории используются в предпочтительном варианте воплощения. Они по отдельности проанализированы в следующих параграфах.
Самая важная категория техники содержит анализ и оценку в свете правил оптимизации. Такой тип анализа исследует генерирование энергии, ассоциированное с различными сегментами и подсегментами тела и ее эффективной передачей через тело. Для ударов на расстояние анализ также исследует способность достижения максимальной скорости головки клюшки во время удара по мячику. Ключевые фундаментальные принципы, лежащие в основе оптимального генерирования и передачи энергии, в краткой форме приведены выше в данном описании, и более подробная информация может быть определена из известных знаний или на основе дополнительных исследований. Они формируют основу для анализа.
Хотя основные принципы не требуется повторять здесь, особенно важные оценки включают в себя:
- Оптимальную установку верхнего положения замаха во всех сегментах.
- Оптимальную магнитуду и моменты времени генерирования локальной энергии в каждом сегменте.
- Оптимальную фиксацию и высвобождение фиксации сегментов.
- Оптимальную передачу энергии в ходе выполнения свинга и при цеповой передаче в головку клюшки.
- Оптимальный момент времени пиковой скорости головки клюшки.
Дополнительная важная категория техники содержит сравнение значимых параметров энергии эквивалентного свинга или определенного диапазона выполнения свинга с соответствующей экспертной моделью. Они являются взаимодополняющими для подхода, включающего в себя использование правил оптимизации. При этом распознают, что свинг в гольфе представляет собой чрезвычайно сложное действие и что дополнительное понимание может быть получено путем сравнения с параметрами энергии, эмпирически известными для оптимального генерирования энергии и ее передачи. Экспертная модель основана на синтезе свингов, выполняемых игроками-экспертами, скорректированных так, чтобы они соответствовали свингу и игроку, анализ которого производится. Тщательный, всесторонний анализ игроков-экспертов, таких как профессионалы, делающие удары на длинные расстояния, и начинающих игроков в гольф в соответствии с принципами, представленными в данном описании, представляет тенденции, проявляемые характерными особенностями, которые во все меньшей степени являются присущими последовательно менее опытным игрокам. Некоторые из этих особенностей экспертов имеют очевидную научную основу, но другие являются в меньшей степени выраженными, и лежащие в их основе преимущества не являются очевидными. Такие особенности экспертов включают в себя моменты времени и переменные магнитуды генерирования локальной энергии, способ, с помощью которого сегменты высвобождают фиксацию и начинают запуск, и синхронизированная механика более дистальных механизмов свинга и цепового механизма. Небольшое количество игроков-экспертов, если кто-либо из них вообще, проявляют все характеристики эксперта; действительно, большая часть игроков-экспертов проявляют некоторые очевидные ошибки при детальном разборе их свингов. Синтез содержит модель, в которой ошибки устранены и характерные особенности экспертов, наиболее часто отображаемые экспертами, сохранены. Синтез регулируют так, чтобы обеспечить возможность его использования для типа тела данного игрока и веса его тела. Основание для такой коррекции может быть определено по результатам исследования самих экспертов, для которых существуют широкие диапазоны типа тела и веса.
Дальнейшая категория техники включает в себя характеристики, которые возникают из природы необработанных выходных данных прогнозирования определенных типов нейронных сетей. Необработанные, несглаженные выходные данные для сетей прогнозирования точки во времени или прогнозирования временной последовательности являются "относительно зашумленными", состоят из цепочки последовательных результатов прогнозирования с переменными значениями. Типичный пример показан на линии C на фиг. 16. При этом наблюдается, что игроки, имеющие больший опыт, формируют менее зашумленные выходные данные, даже при том, что сглаженные финальные выходные данные игрока-эксперта не обязательно должны быть спрогнозированы с какой-либо лучшей точностью, чем у менее опытного игрока. Точность прогнозирования в значительной степени отличается от точности игры. Причина наблюдаемого явления относительной зашумленности, относящейся к навыкам, вероятно, находится в способе работы нейронных сетей, при этом прогнозирование основано на широком диапазоне параметров, получаемых в результате согласованности рабочих характеристик во время тренировки. Уровень зашумленности может быть легко квантован с помощью различных хорошо установленных способов обработки данных, поскольку он, по существу, представляет хорошее качество подгонки или качество подгонки необработанных выходных данных к сглаженным обработанным данным. Разные уровни зашумленности можно найти в разных параметрах прогнозирования и в разных частях свинга, но средние уровни для совершенных свингов могут быть легко установлены и могут использоваться как эталонное значение для каждого прогнозируемого параметра для всех частей свинга. Соответствующие пороговые значения могут быть установлены для возможных отклонений от эталонных уровней. Если свинг имеет собственные уровни зашумленности по сравнению с эталонной моделью, анализ может подчеркивать относительную слабость на разных пороговых уровнях для каждого измеренного аспекта свинга, без необходимости поиска в конкретных областях. Хотя фактические проблемы не будут обозначены непосредственно, этот способ обеспечивает чрезвычайно полезный диагностический инструмент. Например, можно непосредственно привлечь внимание к участкам движений сегмента или генерирования энергии, которые не могли бы быть непосредственно детектированы, в случае анализа только обобщенных эффектов или пиковых значений.
Другие категории техники включают в себя сравнение параметров энергии свинга с другими свингами, выполненными тем же игроком. Сравнение может быть выполнено на основе предыстории игрока при предыдущем выполнении свинга, например, для проверки прогресса, по мере развития курса тренировок в течение некоторого периода времени. Сравнение также может быть выполнено для непосредственной серии свингов, при этом проверяется связность генерирования энергии и ее передачи компонентами свинга. Сравнение может быть дополнительно выполнено со свингами, выполненными с другими клюшками, например, для проверки, как игрок переносит навыки, используемые для клюшек, применяемых для удара на большое расстояние, таких как драйвер, на клюшки для которых не требуется обеспечивать максимальное расстояние, но для которых остаются существенными такое же эффективное и плавное генерирование и передача энергии.
Дополнительная категория техники относится к оценке и анализу на основе безопасности здоровья. Такой тип анализа концентрируется на идентификации потенциальных рисков получения травм, связанных с существующим свингом игрока или изменениями, которые могут возникнуть при попытке увеличения генерирования и передачи энергии.
Результаты анализируемых параметров энергии могут быть подготовлены для представления человеку, например для использования экспертами, участвующими при разработке автоматических процедур интерактивной тренировки, или для непосредственного использования тренерами, для обеспечения дополнительного анализа и интерпретации человеком.
Полученные в результате параметры энергии также могут быть проанализированы совместно с внешним устройством или системами, включающими в себя дополнительные средства датчиков, которые обеспечивают дополнительную информацию о свинге. Например, устройство в соответствии с изобретением может работать совместно с устройством, которое измеряет характеристики движения клюшки и мячика, в результате чего может быть выполнен более широкий анализ свинга, включающий в себя измерение и анализ других аспектов точности свинга.
ИНТЕРАКТИВНОЕ ПРИМЕНЕНИЕ
В предпочтительной компоновке система работает так, что она обеспечивает оценку или анализ, для которых не требуется дополнительный анализ или интерпретация человеком. В предпочтительном варианте выполнения она используется в процессах интерактивной тренировки, когда результаты анализа используются для автоматического формирования подсказки в отношении элемента тренировки с использованием программных средств, обрабатываемых процессором.
Автоматическая интерактивная работа имеет преимущество, состоящее в том, что передаваемая информация может быть скомпонована в формате, соответствующем для игроков или тренеров, которые вряд ли заинтересованы или которые вряд ли понимают работу механизмов генерировании или передачи энергии во время выполнения свинга. Элементы интерактивной тренировки могут быть предварительно подготовлены экспертами, знакомыми с параметрами энергии, правилами оптимизации и искусством тренера, состоящим в определении, как можно улучшить свинг и как эти улучшения могут быть эффективно переданы игроку. Автоматическая интерактивная работа имеет преимущество, состоящее в том, что экспертное обучение может быть предоставлено для игрока при относительно малых затратах и во время и в местах, удобных для игрока.
На фиг. 5 показана блок-схема, представляющая поток информации при выполнении свинга в ходе интерактивной тренировки. Представленные описательные сокращения, используемые на чертеже, приведены в круглых скобках в следующем кратком описании. Силы реакции земли, генерируемые при выполнении действия свинга игроком (PLR), детектируют с помощью средства (DM, СД) детектирования. Информация из средства детектирования обрабатывается средством (EPM, СРО) ранней обработки с получением данных, которые лучше характеризуют свинг. Эти данные принимают с помощью средства (AIM, СИИ) искусственного интеллекта, которое обрабатывает или определяет параметры энергии свинга. Эти параметры энергии обрабатывают и анализируют с помощью средства (PM, СО) обработки, используя технологии, которые включают в себя применение правил оптимизации. Анализируемые данные принимают с помощью средства (ITM, СИТ) интерактивной тренировки, которое во время работы обращается к данным (TD, ДТ) тренировки. На основе анализируемых результатов и путем обращения к данным тренировки интерактивная тренировка обеспечивает передачу элемента интерактивной тренировки с помощью средства (CM, СП) передачи игроку. Игрок может реагировать на элемент интерактивной тренировки в результате связи со средством интерактивной тренировки через средство передачи или может, например, следовать инструкции в элементе интерактивной тренировки для выполнения другого свинга. В случае когда выполняют другой свинг, выполняют аналогичный цикл обработки, и интерактивная тренировка выполняется в соответствии с требованиями системы интерактивной тренировки.
На фиг. 18 схематично показан вид в плане пластины сил и игрового коврика. Описательные сокращения, используемые на фигуре, представлены в скобках в следующем кратком описании. Пластина (1) сил содержит платформу (3) левой ступни и платформу (4) правой ступни. Каждая платформа поддерживается с помощью средства (5) датчиков в четырех угловых положениях. Каждый датчик детектирует силы в направлениях X, Y и Z, когда нагрузка прикладывается к платформе. В альтернативном варианте выполнения каждый датчик детектирует только силу в вертикальном направлении или в направлении Z, когда нагрузка приложена к платформе. Места этих положений поддержки обозначены на чертеже, хотя они фактически не видны в виде в плане. Пластины силы такого типа известны в предшествующем уровне техники. На чертеже также представлены контуры ступней игрока в типичных положениях (6, 7). На фигуре, кроме того, показан мячик (9), при этом мячик, игровой коврик (8) и неподвижная поверхность, расположенные в относительных положениях, пригодны для выполнения ударов с использованием клюшки-драйвера.
Устройство также содержит средство процессора, средство данных и вычислительное средство. Средство процессора содержит программируемый электронный процессор или компьютер, который может называться "процессором". Программируемый процессор обладает способностями, которые могут называться "средством ранней обработки", которое во время работы обрабатывает данные из необработанных сигналов пластины сил для лучшей характеристики свинга. Процессор также обрабатывает нейронные сети, анализирует результаты и обрабатывает интерактивные процедуры тренировки.
Средство данных тренировки содержит средство, которое во время работы предоставляет данные тренировки в процессор, и включает в себя различные накопители данных, устройство поиска и передачи данных, включающее в себя соединение с Интернетом, устройства считывания CD (компакт-диск) и DVD (универсальный цифровой диск) и электронное запоминающее устройство, как внешнее, так и встроенное в процессор. Средство передачи данных включает в себя устройства, которые позволяют обеспечивать связь устройства с игроком или тренером, включая в себя экраны визуального отображения и беспроводные аудиоприемники. Средство передачи данных также включает в себя устройства, которые позволяют игроку или тренеру связываться с устройством, включая в себя визуальные сенсорные экраны и клавиатуру.
В целом, настоящее изобретение направлено на устройство и способ для измерения или анализа свинга в гольфе. Измерения или анализ выполняют относительно генерирования и передачи энергии через тело игрока и клюшку. Данные измерений или анализа преимущественно получают по силам реакции земли для игрока. Обработанные сигналы анализируют, используя систему искусственного интеллекта. Силы реакции земли относятся к силам реакции, возникающим между неподвижной поверхностью и ступнями игрока. Устройство и способ измеряют или анализируют свинг в гольфе автоматически или автоматически и интерактивно.
Следует понимать, что изобретение не ограничивается описанными здесь конкретными деталями и что различные модификации и изменения возможны без выхода за пределы объема изобретения, который определен в приложенной формуле изобретения, направленной на способ и устройство.





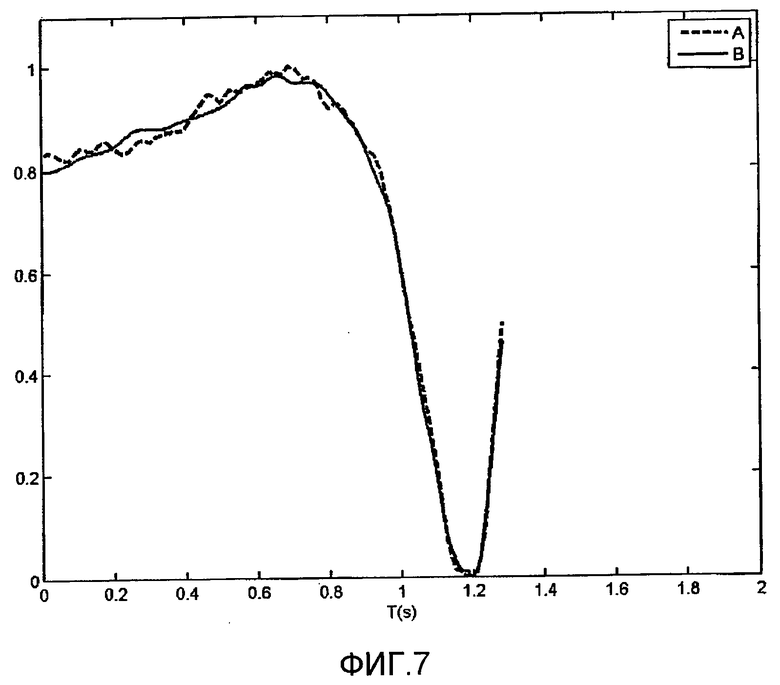
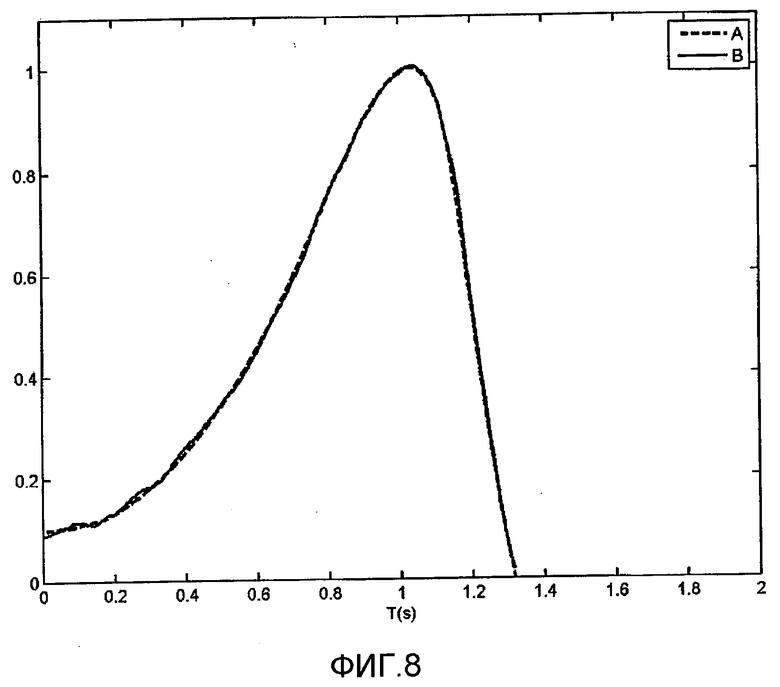
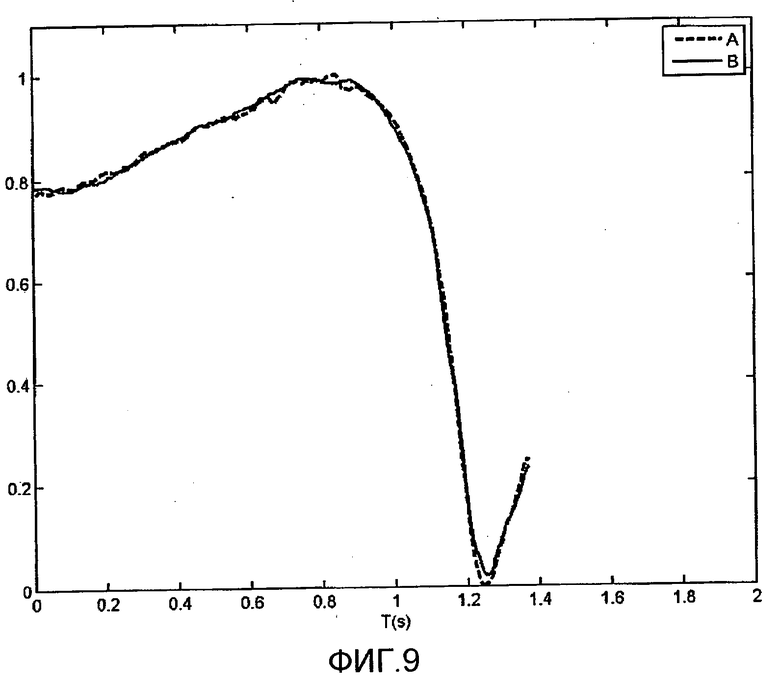

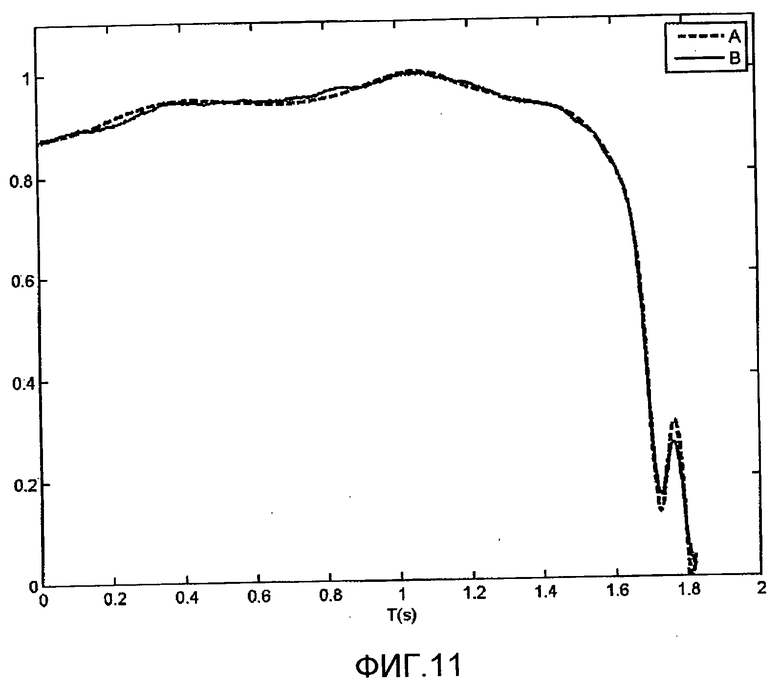
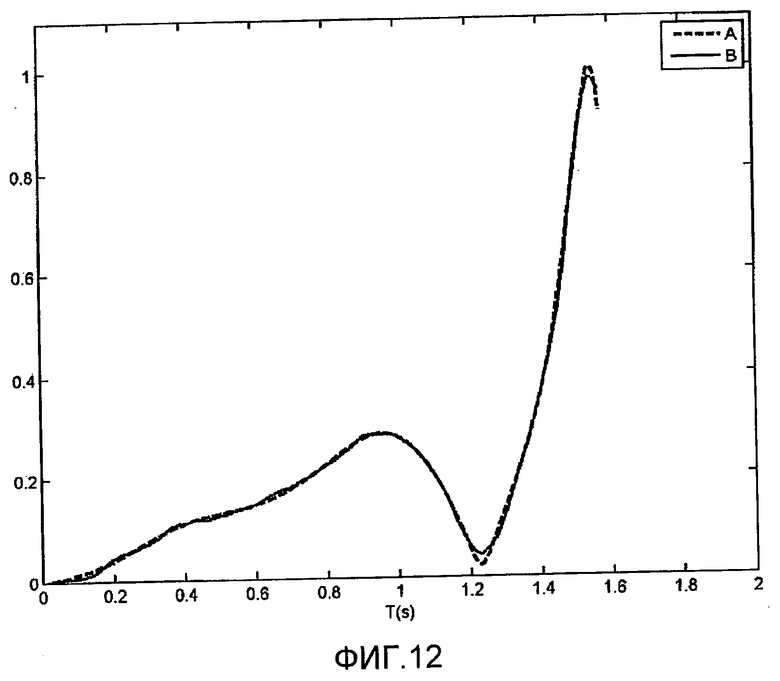
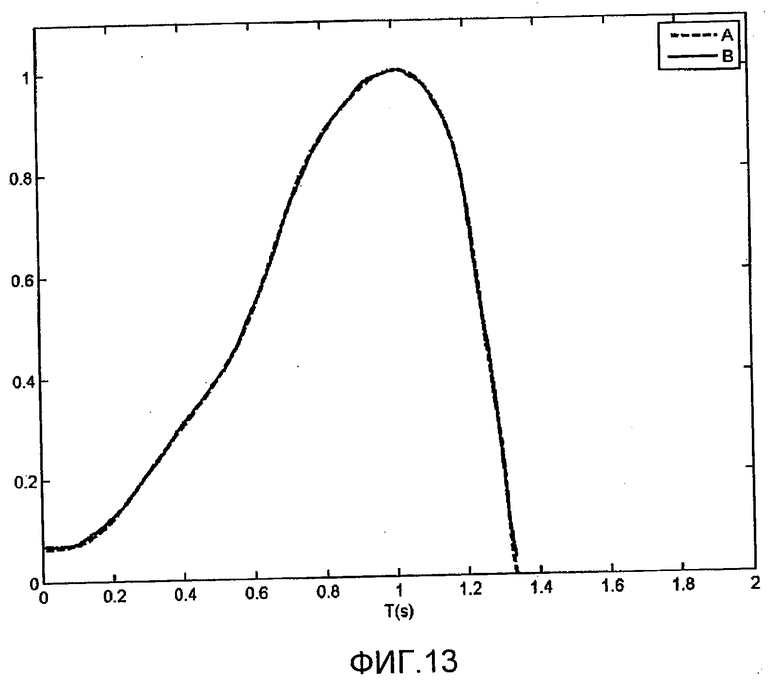
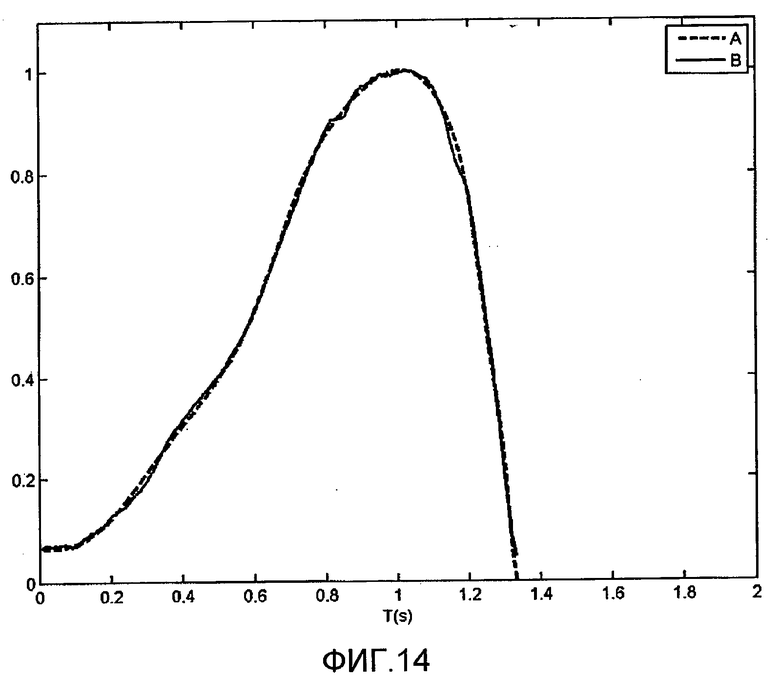
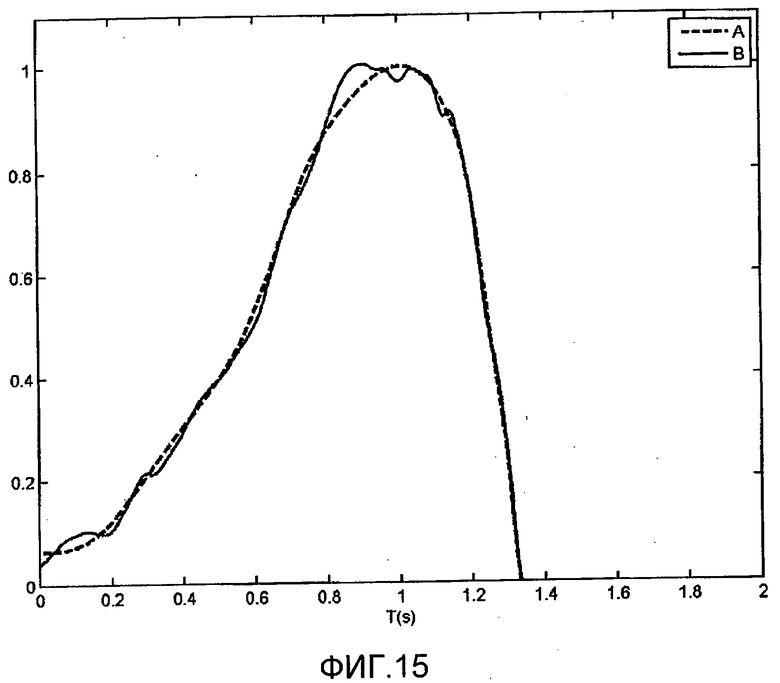
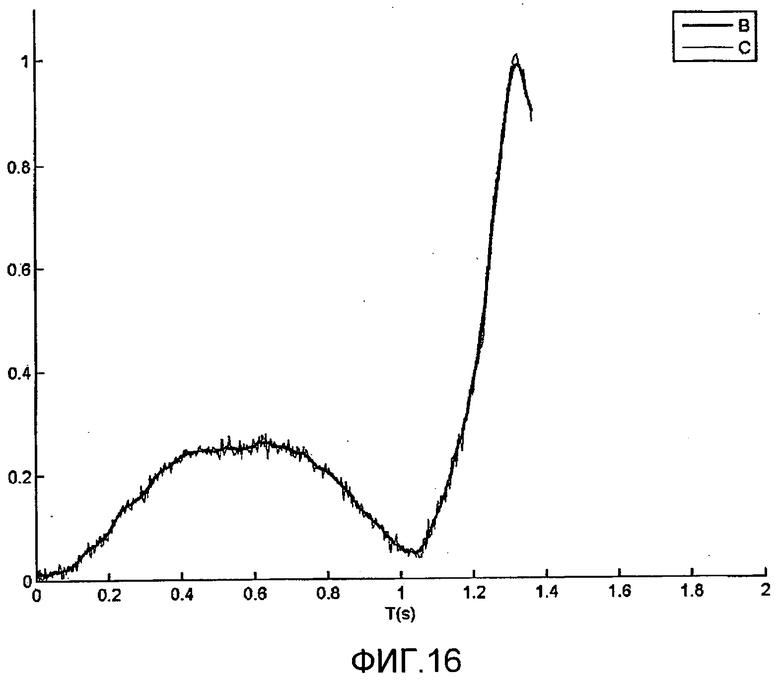
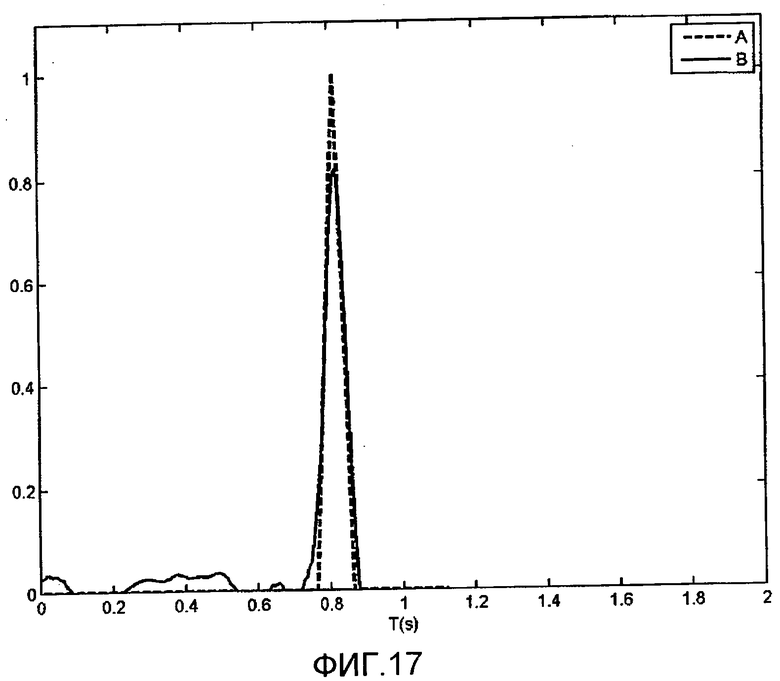

Данное изобретение направлено на устройство и способ для измерения или анализа свинга в гольфе. Измерение или анализ выполняют в отношении генерирования и передачи энергии через тело игрока и клюшку. Данные измерения или анализа преимущественно получают из сил реакции земли игрока. Обработанные сигналы анализируют с помощью системы искусственного интеллекта. Силы реакции земли относятся к силам реакции, которые возникают между неподвижной поверхностью и ступнями игрока. Устройство и способ измеряют или анализируют свинг в гольфе автоматическим способом или автоматическим и интерактивным способом, что позволяет наиболее точно провести анализ движений спортсмена и клюшки при ударе по мячу. 2 н. и 27 з.п. ф-лы, 18 ил.
1. Способ для анализа свинга в гольфе, содержащий следующие этапы, в соответствии с которыми:
(A) получают информацию о свинге в гольфе путем измерения информации с помощью средства измерения, где информация позволяет определять специфичные параметры энергии, относящиеся к генерированию энергии и передаче ее через тело на дистальный конец клюшки при выполнении свингов в гольфе;
при этом информация, измеренная средством измерения, выбрана из информации силы реакции земли во время свинга в гольфе, измеренной средством измерения силы, включающим в себя пластины силы и подушки давления, и кинематической информации из свинга в гольфе, измеренной средством захвата движения, включающим в себя электромагнитные системы захвата движения и оптические системы захвата движения;
(B) определяют параметры энергии свинга в гольфе путем автоматической обработки измеряемой информации электронным процессором, выполненным с возможностью определения параметров энергии свинга в гольфе; и
(C) анализируют свинг в гольфе путем автоматической установки упомянутых параметров энергии электронным процессором, выполненным с возможностью анализа свинга, в соответствии с определенными критериями, представляющими собой правила оптимизации, доступные для или предоставляемые в упомянутый процессор, и устанавливающими, как на свинг влияют такие параметры энергии;
D) автоматически выполняют оценку параметров энергии, используя электронный процессор, который анализирует свинг в гольфе, для игрока и клюшки, моделируемых при расчетах в ходе обработки как кинетическая цепь выбранного набора сегментов и подсегментов, связанных соединениями;
при этом сегменты и подсегменты содержат в значительной мере жесткие участки корпуса игрока и клюшки и включают в себя выбранные из: сегментов клюшки и нижней части тела игрока, верхней части тела, верхней части грудной клетки, нижней части грудной клетки, таза, правой руки, верхней части правой руки, нижней части правой руки, кисти правой руки, правой ноги, левой руки, верхней части левой руки, нижней части левой руки, кисти левой руки, левой ноги, рук, кистей рук и сегментов ног;
причем соединения включают в себя выбранные из: плеч, локтей, запястий, правого плеча, правого локтя, правого запястья, левого плеча, левого локтя, левого запястья, соединения между верхней и нижней частями тела, между верхней частью грудной клетки и нижней частью грудной клетки, между грудной клеткой и тазом, между нижней частью грудной клетки и тазом, между тазом и ногами и между руками и клюшкой;
(Е) параметр энергии автоматически оценивают с помощью электронного процессора, который анализирует свинг в гольфе, в отношении выбора из энергии, генерируемой мышцами, взаимосвязанной с соединениями между сегментом и проксимальным сегментом, и энергией, передаваемой в сегмент из проксимальных сегментов, где конец головки клюшки определен как дистальный конец и соединение между ступнями ног и землей определено как проксимальный конец в процессоре и где сегмент содержит выбор из сегмента и подсегмента; и
(F) параметр энергии включает в себя выбор из:
параметров, относящихся к энергии, генерируемой мышцами, взаимосвязанной с выбором из следующих соединений: плечи, локти, запястья, правое плечо, правый локоть, правое запястье, левое плечо, левый локоть, левое запястье, соединения между верхней и нижней частями тела, между верхней частью грудной клетки и нижней частью грудной клетки, между грудной клеткой и тазом, между нижней частью грудной клетки и тазом, между тазом и ногами и между руками и клюшкой; и
параметры, относящиеся к передаче энергии, включая в себя выбор из передачи фиксации, передачи запуска, передачи метания, цеповой передачи и передачи кинетической энергии в результате уменьшения радиуса, где:
передача фиксации кинетической энергии определена как передача от одного сегмента до другого вдоль цепи путем фиксации сегмента с ускоряющимся проксимальным сегментом таким образом, что сегмент ускоряется вместе с проксимальным сегментом, благодаря энергии, которая ассоциирована с проксимальным сегментом; передача запуска кинетической энергии в сегмент определена как передача от проксимального сегмента, при которой выполняют обмен моментом и кинетическую энергию передают, когда локальная энергия сегмента используется для начала движения сегмента от проксимального сегмента; передача метания кинетической энергии определена как передача под действием сил, приводящих в движение плечевой сустав со стороны цели и выполняющих метательное движение дистальных сегментов по дуге, которые ускоряют дистальные участки; цеповая передача кинетической энергии определена, как передача в самый дистальный конец существующей кинетической энергии в двух соединенных сегментах, которые вращаются и перемещаются в одном направлении, где проксимальный сегмент и проксимальный конец дистального сегмента замедляются под действием центробежных сил, действующих на сегменты; и передача кинетической энергии в результате уменьшения радиуса определена, когда поворачивающийся игрок уменьшает угловой момент инерции тела путем уменьшения эффективного радиуса поворота, обеспечивая ускорение более дистальных частей.
2. Способ по п.1, в котором полезную информацию измеряют с помощью средства измерения во время свинга для автоматического определения комбинации параметров энергии, используя электронный процессор, который определяет параметр энергии в свинге;
комбинация параметров энергии автоматически определяется упомянутым электронным процессором из упомянутой полезной информации; и
упомянутую комбинацию параметров энергии автоматически оценивают с помощью электронного процессора, который анализирует свинг, для анализа свинга с учетом правила оптимизации.
3. Способ по п.1, содержащий выполнение анализа свинга в гольфе, который не зависит от вмешательства эксперта-человека.
4. Способ по п.1, в котором анализ свинга в гольфе относится к улучшению выполнения свинга в гольфе путем предоставления информации, относящейся к выбору из получения максимальной скорости головки клюшки, поддержки точности, улучшения управления, улучшения последовательности и идентификации рисков телесных повреждений.
5. Способ по п.1, в котором параметр энергии включает в себя выбор из следующих параметров:
моменты времени начала и завершения активации локальной энергии/сил сегмента и подсегмента;
моменты времени начала и завершения снижения активности локальной энергии/сил сегмента и подсегмента;
магнитуды и длительности активации локальной энергии/сил сегмента и подсегмента, включающие в себя средние и пиковые значения;
моменты времени и характеристики перехода фиксации между соединенными сегментами;
моменты времени и характеристики перехода высвобождения фиксации между соединенными сегментами;
уровни и моменты времени пиковых значений линейной и угловой кинетической энергии сегмента;
угловые положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения, из-за смещения под действием локальных групп мышц;
линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения из-за смещения под действием локальных групп мышц;
абсолютные угловые положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения;
абсолютные линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения;
абсолютные скорости сегментов тела и клюшки, включающие в себя абсолютную скорость головки клюшки;
угловые положения, скорости и ускорения между сегментами туловища и рук и между сегментами рук и клюшки;
моменты времени и переходные характеристики событий достижения верхнего положения замаха для сегментов тела и клюшки;
магнитуды углов между различными соединенными сегментами в событиях верхнего положения во время замаха;
моменты времени максимального растяжения-сокращения мышц между различными соединенными сегментами;
магнитуды углов между различными соединенными сегментами во время максимального растяжения-сокращения мышц между этими сегментами;
передача фиксации кинетической энергии, определенная как передача от одного сегмента к другому вдоль цепи путем фиксации данного сегмента относительно ускоряющегося проксимального сегмента таким образом, что данный сегмент ускоряется вместе с проксимальным сегментом под действием энергии, генерируемой в или существующей в проксимальном сегменте;
передача запуска кинетической энергии, определенная как передача из проксимального сегмента в данный сегмент, когда происходит обмен моментом и передают кинетическую энергию, когда локальная энергия данного сегмента используется для запуска данного сегмента от проксимального сегмента;
передача метания кинетической энергии, определенная как передача под действием сил, перемещающих или вращающих плечевой сустав со стороны цели и выполняющих метательное движение дистальных сегментов по дуге, которое ускоряет дистальные участки;
цеповая передача кинетической энергии, определенная как передача в самый дистальный конец существующей кинетической энергии в двух соединенных сегментах, которые вращаются и перемещаются в одном направлении, где проксимальный сегмент и проксимальный конец дистального сегмента замедляются под действием центробежных сил, действующих на сегменты;
передача кинетической энергии из-за уменьшения радиуса, когда поворот игрока уменьшает угловой момент инерции тела в результате уменьшения эффективного радиуса вращения, вызывая ускорение более дистальных частей;
накопление потенциальной гравитационной энергии при замахе и в начале маха вниз;
преобразование потенциальной энергии гравитации в кинетическую энергию во время маха вниз;
накопление потенциальной энергии упругой деформации рукоятки клюшки во время маха вниз;
преобразование потенциальной энергии упругой деформации рукоятки клюшки в кинетическую энергию при махе вниз;
категория генерирования и передачи энергии вспомогательной передней плоскости;
характеристики генерирования и передачи энергии вспомогательной передней плоскости;
положения центра давления, скорости, ускорения и диапазон движения относительно параметров энергии передней плоскости.
6. Способ по п.1, в котором правила оптимизации включают в себя выбор из следующих представленных в списке правил, которые представлены в формате критериев, которые, когда они присутствуют или когда они выделены, имеют тенденцию оптимизации свинга и, когда отсутствуют или уменьшены, проявляют тенденцию ухудшения оптимизации параметров свинга:
сегменты и подсегменты должны достигать достаточной угловой скорости и ассоциированной кинетической энергии во время замаха для плотного закручивания сегментов в их верхних положениях замаха, при этом сегменты закручивают во временной последовательности от проксимального к дистальному;
последовательное закручивание сегментов и подсегментов должно быть плавным и скоординированным;
степень закручивания между соединенными сегментами и подсегментами должна быть такой, чтобы обеспечивать оптимальное растяжение-сокращение всех локальных групп мышц и также оптимальное упругое растяжение значимых частей тела;
когда они занимают верхнее положение при замахе, каждый сегмент и подсегмент должен быстро изменять направление вращения с замаха на мах вниз;
мах вниз должен начинаться от наиболее проксимального сегмента, используя энергию своей локальной группы мышц;
локальная группа мышц наиболее проксимального сегмента должна активироваться для высокого уровня активации настолько быстро, насколько это возможно;
все другие сегменты и подсегменты должны начинать свои движения при махе вниз, начиная из их верхнего положения замаха, будучи зафиксированными в формации цепи от проксимального до дистального сегментов с наиболее проксимальным сегментом, причем все они получают энергию от локальной группы мышц наиболее проксимального сегмента;
все сегменты и подсегменты должны начинать свое движение при выполнении маха вниз, будучи зафиксированными в формации цепи с наиболее проксимальным сегментом, при этом локальные группы мышц этих сегментов и подсегментов, дистальные для наиболее проксимального сегмента, оптимально дополнительно растягиваются-сокращаются и упруго растягиваются и такое дальнейшее оптимальное растяжение-сокращение и упругое растяжение заканчиваются, когда каждый сегмент или подсегмент достигает той же скорости, что и его проксимальный сосед в цепи;
кроме случая, когда локальная группа мышц сегмента или подсегмента в значительной степени более мощная, чем у ее дистального соседа, сегмент или подсегмент должен заканчивать свое основное генерирование локальной энергии до того, как дистальный сегмент выполнит запуск от него, при этом дистальный сегмент или подсегмент начинает запуск только после того, как его проксимальный сосед достигнет максимальной скорости;
сегмент или подсегмент должен высвободить фиксацию от своего проксимального соседа перед началом запуска от него;
локальная группа мышц каждого сегмента и подсегмента должна оставаться на низком уровне активации до тех пор, пока данный сегмент не высвободит фиксацию от и не начнет запуск от проксимального сегмента, после чего он активируется до высокого уровня активации и поддерживает его (в случае группы мышц наиболее проксимального сегмента это начинается с самого начала маха вниз), более высокий уровень активации заканчивается, и локальные группы мышц снижают свою активность до низкого уровня активации по мере того, как дистальный сегмент высвобождает фиксацию от и начинает запуск от данного сегмента, причем исключение из правила состоит в том, что группа мышц сегмента рук продолжает активацию после высвобождения фиксации сегмента клюшки из-за того, что группа мышц сегмента рук значительно более мощная, чем сегмент клюшки;
локальные группы мышц сегментов и подсегментов должны активироваться и снижать активность между высоким и низким уровнями активации настолько быстро, насколько это возможно;
когда происходит активация до более высоких уровней активации, группы мышц каждого сегмента и подсегмента должны поддерживать более высокий оптимальный уровень активации для ускорения сегмента до требуемой максимальной скорости как можно быстрее, при этом группа мышц должна снижать активность до более низкого уровня настолько быстро, насколько это возможно, после того, как сегмент достигнет требуемой максимальной скорости;
уровни активации энергии и требуемые скорости сегмента должны изменяться в соответствии с требованиями свинга и должны быть оптимально максимальными для свингов, в которых требуется обеспечить максимальную скорость головки клюшки, и оптимально уменьшенными, когда требуются более низкие скорости головки клюшки;
движения сегмента и подсегмента должны продолжаться плавно и с оптимальной механической эффективностью, линейные движения должны выполняться в оптимальных, механически эффективных направлениях, и угловые движения должны происходить вокруг оптимальных, механически эффективных осей;
оптимальный угол фиксации должен быть установлен между сегментами рук и клюшки в начале маха вниз этих сегментов, что способствует оптимальной передаче энергии типа метания между этими сегментами, когда они высвобождают фиксацию позже во время выполнения маха вниз, этот угол находится между 60 и 70°;
оптимальный угол фиксации между сегментами рук и клюшки должен поддерживаться до точки при выполнении маха вниз, в которой высвобождение фиксации обеспечивает достижение последующей максимальной скорости головки клюшки, и она достигает этой максимальной скорости в момент удара;
для свинга, в котором требуется обеспечить высокую скорость головки клюшки, оптимальный угол фиксации между сегментами рук и клюшки должен поддерживаться до точки во время маха вниз, в которой высвобождение фиксации обеспечивает достижение максимальной угловой скорости сегментом клюшки незадолго до удара, что обеспечивает ускорение головки клюшки за счет высвобождения энергии упругой деформации изогнутой ручки клюшки, с последующим достижением максимальной скорости и достижением этой максимальной скорости в момент удара;
генерирование и передача энергии вспомогательной передней плоскости могут быть разделены на категории одного из нескольких типов, которые не смешиваются друг с другом, при этом, вероятно, существует один самый общий тип, один умеренно общий тип и, по меньшей мере, один другой нехарактерный тип, умеренно общий тип проявляет обратное движение при линейном движении центра давления от направления на цель после исходного движения в направлении к ней, что отсутствует в общем типе;
при общем типе генерирования и передачи энергии вспомогательной передней плоскости, когда центр давления не выполняет движение в обратную сторону после первого движения в направлении цели, в случае когда для свинга требуется максимальная скорость головки клюшки, игрок должен двигаться таким образом, чтобы его или ее центр давления в направлении цели имел максимальную длину линейного движения и имел максимальную линейную скорость;
при общем типе генерирования и передачи энергии вспомогательной передней плоскости, в случае когда происходит обратное движение центра давления после его первого движения в направлении цели, когда во время свинга требуется обеспечить максимальную скорость головки клюшки, игрок должен перемещаться таким образом, чтобы его или ее траектория центра давления вначале имела максимальную линейную скорость в направлении цели и затем имела максимальную линейную скорость в обратном направлении от цели.
7. Способ по п.1, который содержит следующие этапы:
a) получают информацию о силе реакции земли во время свинга;
b) обрабатывают эту информацию для получения данных, которые лучше характеризуют свинг; и
с) принимают и обрабатывают обработанные данные с помощью искусственного интеллекта.
8. Способ по п.7, в котором
информацию о силе реакции земли получают как информацию отклика нагрузки, а не как информацию отклика деформации; и
некоторую из информации обрабатывают отдельно от другой информации; и
информацию обрабатывают для получения данных, которые лучше характеризуют свинг, перед их приемом и обработкой с помощью искусственного интеллекта, с использованием выбранных из следующих техник:
a) сглаживают поток информации, например, используя арифметическое скользящее среднее;
b) масштабируют для получения сравнимых значений информации;
c) стабилизируют температуру для исключения ошибок из-за изменения температуры;
d) стабилизируют напряжение для исключения ошибок из-за изменения напряжения в системе;
e) преобразуют в положения Х и Y центра давления отдельных ступней или комбинации поперек обеих ступней;
f) преобразуют в скорости Х и Y центра давления отдельных ступней или комбинации поперек обеих ступней; и
g) преобразуют в ускорение Х и Y центра давления отдельных ступней или комбинации поперек обеих ступней.
9. Способ по п.7, в котором
искусственный интеллект содержит использование способов тренируемой искусственной нейронной сети; и отдельные сети используют для прогнозирования различных параметров энергии.
10. Способ по п.1, в котором
параметры энергии автоматически анализируют или оценивают, используя все или выбранные из следующих техник:
a) оценка или анализ в свете правил оптимизации;
b) оценка или анализ путем сравнения со свингами, выполненными игроками-экспертами;
d) оценка или анализ путем сравнения с другими свингами того же игрока; и
e) оценка и анализ на основе безопасности здоровья.
11. Способ по п.7, в котором
параметры энергии автоматически анализируют или оценивают путем использования относительно незашумленного способа, где способ относится к анализу уровня шума прогнозируемых выходных параметров сети для свинга или части свинга, и при этом подразумеваются лучшие характеристики при уменьшении уровня шумов; и
анализ включает в себя выбор из следующих свойств:
a) сравнение выполняют для уровня шумов эталонного свинга или другого эталонного значения;
b) сравнение выполняют для эталонного свинга на основе игры игроков-экспертов;
c) уровни шумов устанавливают как меру качества подгонки или качества подгонки необработанных выходных данных для сглаженных выходных данных; и
d) анализ или оценку используют для выделенных относительных слабых моментов или сильных моментов для разных пороговых уровней во время свинга.
12. Способ по п.7, который включает в себя выбор из следующего:
a) информацию обрабатывают интерактивным способом, и способ во время работы подсказывает тренировочный элемент и передает этот тренировочный элемент игроку;
b) интерактивные тренировочные элементы заранее подготавливают эксперты, хорошо знакомые с таким генерированием и передачей энергии во время свинга, с тем, как их можно улучшить и как эти улучшения могут быть эффективно переданы игроку; и
c) информацию датчиков обрабатывают; искусственный интеллект получает параметры энергии из обработанной информации; параметры энергии обрабатывают для анализа или оценки свинга; и процедуры интерактивной тренировки обрабатывают и передают пользователю, такому как игрок или тренер.
13. Способ по п.7, в котором
силы реакции земли отдельно определяют с помощью датчиков или измеряют для левой и правой ступней игрока.
14. Способ по п.1, который включает в себя выбор из:
a) предшествующего этапа определения, что параметры, которые являются важными для анализа свинга в гольфе, включают в себя параметры, относящиеся к генерированию и передаче энергии через тело, при выполнении свинга;
b) предшествующего этапа идентификации, что параметры, которые являются важными для анализа свинга в гольфе, включают в себя параметры, относящиеся к генерированию и передаче энергии через тело, при выполнении свинга;
c) предшествующего этапа определения параметра энергии;
d) предшествующего этапа идентификации параметра энергии;
e) предшествующего этапа определения правил оптимизации; и
f) предшествующего этапа идентификации правил оптимизации.
15. Устройство для анализа свинга в гольфе, содержащее:
(A) средство измерения, выполненное с возможностью измерения и получения информации о свинге в гольфе, где информация позволяет определять специфичные параметры энергии, относящиеся к генерированию энергии и передаче ее через тело на дистальный конец клюшки при выполнении свингов в гольфе;
при этом средство измерения включает в себя средства, выбранные из: средства измерения силы, включающего в себя пластины силы и подушки давления, которые во время работы измеряют информацию силы реакции земли во время свинга в гольфе, и средства измерения захвата движения, включающего в себя электромагнитные системы захвата движения и оптические системы захвата движения, которые во время работы измеряют кинематическую информацию от свинга в гольфе;
(B) электронный процессор, выполненный с возможностью определения параметров энергии свинга в гольфе, автоматически обрабатывая измеряемую информацию; и
(C) электронный процессор, анализирующий свинг в гольфе, автоматически оценивая упомянутые параметры энергии по заданным критериям, представляющим собой правила оптимизации, доступные для или предоставляемые в процессор, определяющим, как влияют на свинг такие параметры энергии;
при этом (D) оценка параметра энергии выполняется автоматически электронным процессором, который анализирует свинг в гольфе, для игрока и клюшки, моделируемых при расчетах в ходе обработки как кинетическая цепь выбранного набора сегментов и подсегментов, связанных соединениями;
при этом сегменты и подсегменты содержат умозрительно жесткие участки корпуса игрока и клюшки и включают в себя выбранные из: сегментов клюшки и нижней части тела игрока, верхней части тела, верхней части грудной клетки, нижней части грудной клетки, таза, правой руки, верхней части правой руки, нижней части правой руки, кисти правой руки, правой ноги, левой руки, верхней части левой руки, нижней части левой руки, кисти левой руки, левой ноги, рук, кистей рук и сегментов ног;
и где соединения включают в себя выбранные из: плеч, локтей, запястий, правого плеча, правого локтя, правого запястья, левого плеча, левого локтя, левого запястья, соединения между верхней и нижней частями тела, между верхней частью грудной клетки и нижней частью грудной клетки, между грудной клеткой и тазом, между нижней частью грудной клетки и тазом, между тазом и ногами и между руками и клюшкой;
(Е) электронный процессор, анализирующий свинг в гольфе для автоматической оценки параметра энергии в отношении выбора из энергии, генерируемой мышцами, взаимосвязанной с соединениями между сегментом и проксимальным сегментом, и энергией, передаваемой в сегмент из проксимальных сегментов, где конец головки клюшки в цепи обозначен как дистальный конец и соединение между ступнями ног и землей обозначено как проксимальный конец в процессоре и где сегмент содержит выбор из сегмента и подсегмента; и
(F) электронный процессор, анализирующий свинг, автоматически выполняя оценку параметра энергии, относящегося к выбору из:
энергии, генерируемой мышцами, взаимосвязанной с выбором из следующих соединений: плечи, локти, запястья, правое плечо, правый локоть, правое запястье, левое плечо, левый локоть, левое запястье, соединения между верхней и нижней частями тела, между верхней частью грудной клетки и нижней частью грудной клетки, между грудной клеткой и тазом, между нижней частью грудной клетки и тазом, между тазом и ногами, и между руками и клюшкой; и
передачи энергии, включающей в себя выбор из передачи фиксации, передачи запуска, передачи метания, цеповой передачи и передачи кинетической энергии в результате уменьшения радиуса, в котором
передача фиксации кинетической энергии определена как передача от одного сегмента до другого вдоль цепи путем фиксации сегмента с ускоряющимся проксимальным сегментом таким образом, что сегмент ускоряется вместе с проксимальным сегментом, благодаря энергии, которая ассоциирована с проксимальным сегментом; передача запуска кинетической энергии в сегмент определена как передача от проксимального сегмента, при которой выполняют обмен моментом и кинетическую энергию передают, когда локальная энергия сегмента используется для начала движения сегмента от проксимального сегмента; передача метания кинетической энергии определена как передача под действием сил, приводящих в движение плечевой сустав со стороны цели и выполняющих метательное движение дистальных сегментов по дуге, которые ускоряют дистальные участки; цеповая передача кинетической энергии определена как передача в самый дистальный конец существующей кинетической энергии в двух соединенных сегментах, которые вращаются и перемещаются в одном направлении, где проксимальный сегмент и проксимальный конец дистального сегмента замедляются под действием центробежных сил, действующих на сегменты; и передача кинетической энергии в результате уменьшения радиуса определена, когда поворачивающийся игрок уменьшает угловой момент инерции тела путем уменьшения эффективного радиуса поворота, обеспечивая ускорение более дистальных частей.
16. Устройство по п.15, в котором
средство измерения выполнено с возможностью измерения полезной информации во время свинга для автоматического определения комбинации параметров энергии, используя электронный процессор, который определяет параметр энергии в свинге;
электронный процессор, определяющий параметр энергии, выполнен с возможностью автоматического определения упомянутой комбинации параметров энергии из упомянутой полезной информации; и
электронный процессор, анализирующий свинг, выполнен с возможностью автоматического выполнения оценки упомянутой комбинации параметра энергии для анализа свинга с учетом правила оптимизации.
17. Устройство по п.15, выполненное с возможностью осуществления анализа независимо от вмешательства эксперта-человека.
18. Устройство по п.15, в котором анализ свинга в гольфе относится к улучшению выполнения свинга в гольфе путем предоставления информации, относящейся к выбору из получения максимальной скорости головки клюшки, поддержки точности, улучшения управления, улучшения последовательности и идентификации рисков телесных повреждений.
19. Устройство по п.15, в котором параметр энергии включает в себя выбор из следующих параметров:
моменты времени начала и завершения активации локальной энергии/сил сегмента и подсегмента;
моменты времени начала и завершения снижения активности локальной энергии/сил сегмента и подсегмента;
магнитуды и длительности активации локальной энергии/сил сегмента и подсегмента, включающие в себя средние и пиковые значения;
моменты времени и характеристики перехода фиксации между соединенными сегментами;
моменты времени и характеристики перехода высвобождения фиксации между соединенными сегментами;
уровни и моменты времени пиковых значений линейной и угловой кинетической энергии сегмента;
угловые положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения из-за смещения под действием локальных групп мышц;
линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения из-за смещения под действием локальных групп мышц;
абсолютные угловые положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения;
абсолютные линейные положения, скорости и ускорения сегментов тела и клюшки во время свинга, включающие в себя пиковые скорости и ускорения;
абсолютные скорости сегментов тела и клюшки, включающие в себя абсолютную скорость головки клюшки;
угловые положения, скорости и ускорения между сегментами туловища и рук и между сегментами рук и клюшки;
моменты времени и переходные характеристики событий достижения верхнего положения замаха для сегментов тела и клюшки;
магнитуды углов между различными соединенными сегментами в событиях верхнего положения во время замаха;
моменты времени максимального растяжения-сокращения мышц между различными соединенными сегментами;
магнитуды углов между различными соединенными сегментами во время максимального растяжения-сокращения мышц между этими сегментами;
передача фиксации кинетической энергии, определенная как передача от одного сегмента к другому вдоль цепи путем фиксации данного сегмента относительно ускоряющегося проксимального сегмента таким образом, что данный сегмент ускоряется вместе с проксимальным сегментом под действием энергии, генерируемой в или существующей в проксимальном сегменте;
передача запуска кинетической энергии, определенная как передача из проксимального сегмента в данный сегмент, когда происходит обмен моментом и передают кинетическую энергию, когда локальная энергия данного сегмента используется для запуска данного сегмента от проксимального сегмента;
передача метания кинетической энергии, определенная как передача под действием сил, перемещающих или вращающих плечевой сустав со стороны цели и выполняющих метательное движение дистальных сегментов по дуге, которое ускоряет дистальные участки;
цеповая передача кинетической энергии, определенная как передача в самый дистальный конец существующей кинетической энергии в двух соединенных сегментах, которые вращаются и перемещаются в одном направлении, где проксимальный сегмент и проксимальный конец дистального сегмента замедляются под действием центробежных сил, действующих на сегменты;
передача кинетической энергии из-за уменьшения радиуса, когда поворот игрока уменьшает угловой момент инерции тела в результате уменьшения эффективного радиуса вращения, вызывая ускорение более дистальных частей;
накопление потенциальной гравитационной энергии при замахе и в начале маха вниз;
преобразование потенциальной энергии гравитации в кинетическую энергию во время маха вниз;
накопление потенциальной энергии упругой деформации рукоятки клюшки во время маха вниз;
преобразование потенциальной энергии упругой деформации рукоятки клюшки в кинетическую энергию при махе вниз;
категория генерирования и передачи энергии вспомогательной передней плоскости;
характеристики генерирования и передачи энергии вспомогательной передней плоскости;
положения центра давления, скорости, ускорения и диапазон движения относительно параметров энергии передней плоскости.
20. Устройство по п.15, в котором правила оптимизации включают в себя выбор из следующих критериев, которые, когда они присутствуют или когда они выделены, имеют тенденцию оптимизации свинга, и когда отсутствуют или уменьшены, проявляют тенденцию ухудшения оптимизации параметров свинга:
сегменты и подсегменты должны достигать достаточной угловой скорости и ассоциированной кинетической энергии во время замаха для плотного закручивания сегментов в их верхних положениях замаха, при этом сегменты закручивают во временной последовательности от проксимального к дистальному;
последовательное закручивание сегментов и подсегментов должно быть плавным и скоординированным;
степень закручивания между соединенными сегментами и подсегментами должна быть такой, чтобы обеспечивать оптимальное растяжение-сокращение всех локальных групп мышц и также оптимальное упругое растяжение значимых частей тела;
когда они занимают верхнее положение при замахе, каждый сегмент и подсегмент должен быстро изменять направление вращения с замаха на мах вниз;
мах вниз должен начинаться от наиболее проксимального сегмента, используя энергию своей локальной группы мышц;
локальная группа мышц наиболее проксимального сегмента должна активироваться для высокого уровня активации настолько быстро, насколько это возможно;
все другие сегменты и подсегменты должны начинать свои движения при махе вниз, начиная из их верхнего положения замаха, будучи зафиксированными в формации цепи от проксимального до дистального сегментов с наиболее проксимальным сегментом, причем все они получают энергию от локальной группы мышц наиболее проксимального сегмента;
все сегменты и подсегменты должны начинать свое движение при выполнении маха вниз, будучи зафиксированными в формации цепи с наиболее проксимальным сегментом, при этом локальные группы мышц этих сегментов и подсегментов, дистальные для наиболее проксимального сегмента, оптимально дополнительно растягиваются-сокращаются и упруго растягиваются и такое дальнейшее оптимальное растяжение-сокращение и упругое растяжение заканчиваются, когда каждый сегмент или подсегмент достигает той же скорости, что и его проксимальный сосед в цепи;
кроме случая, когда локальная группа мышц сегмента или подсегмента в значительной степени более мощная, чем у ее дистального соседа, сегмент или подсегмент должен заканчивать свое основное генерирование локальной энергии до того, как дистальный сегмент выполнит запуск от него, при этом дистальный сегмент или подсегмент начинает запуск только после того, как его проксимальный сосед достигнет максимальной скорости;
сегмент или подсегмент должен высвободить фиксацию от своего проксимального соседа перед началом запуска от него;
локальная группа мышц каждого сегмента и подсегмента должна оставаться на низком уровне активации до тех пор, пока данный сегмент не высвободит фиксацию от и не начнет запуск от проксимального сегмента, после чего он активируется до высокого уровня активации и поддерживает его (в случае группы мышц наиболее проксимального сегмента это начинается с самого начала маха вниз), более высокий уровень активации заканчивается, и локальные группы мышц снижают свою активность до низкого уровня активации по мере того, как дистальный сегмент высвобождает фиксацию от и начинает запуск от данного сегмента, причем исключение из правила состоит в том, что группа мышц сегмента рук продолжает активацию после высвобождения фиксации сегмента клюшки из-за того, что группа мышц сегмента рук значительно более мощная, чем сегмент клюшки;
локальные группы мышц сегментов и подсегментов должны активироваться и снижать активность между высоким и низким уровнями активации настолько быстро, насколько это возможно;
когда происходит активация до более высоких уровней активации, группы мышц каждого сегмента и подсегмента должны поддерживать более высокий оптимальный уровень активации для ускорения сегмента до требуемой максимальной скорости как можно быстрее, при этом группа мышц должна снижать активность до более низкого уровня настолько быстро, насколько это возможно, после того, как сегмент достигнет требуемой максимальной скорости;
уровни активации энергии и требуемые скорости сегмента должны изменяться в соответствии с требованиями свинга и должны быть оптимально максимальными для свингов, в которых требуется обеспечить максимальную скорость головки клюшки, и оптимально уменьшенными, когда требуются более низкие скорости головки клюшки;
движения сегмента и подсегмента должны продолжаться плавно и с оптимальной механической эффективностью, линейные движения должны выполняться в оптимальных, механически эффективных направлениях, и угловые движения должны происходить вокруг оптимальных, механически эффективных осей;
оптимальный угол фиксации должен быть установлен между сегментами рук и клюшки в начале маха вниз этих сегментов, что способствует оптимальной передаче энергии типа метания между этими сегментами, когда они высвобождают фиксацию позже во время выполнения маха вниз, этот угол находится между 60 и 70є;
оптимальный угол фиксации между сегментами рук и клюшки должен поддерживаться до точки при выполнении маха вниз, в которой высвобождение фиксации обеспечивает достижение последующей максимальной скорости головки клюшки, и она достигает этой максимальной скорости в момент удара;
для свинга, в котором требуется обеспечить высокую скорость головки клюшки, оптимальный угол фиксации между сегментами рук и клюшки должен поддерживаться до точки во время маха вниз, в которой высвобождение фиксации обеспечивает достижение максимальной угловой скорости сегментом клюшки незадолго до удара, что обеспечивает ускорение головки клюшки за счет высвобождения энергии упругой деформации изогнутой ручки клюшки, с последующим достижением максимальной скорости и достижением этой максимальной скорости в момент удара;
генерирование и передача энергии вспомогательной передней плоскости могут быть разделена на категории одного из нескольких типов, которые не смешиваются друг с другом, при этом, вероятно, существует один самый общий тип, один умеренно общий тип и, по меньшей мере, один другой нехарактерный тип, умеренно общий тип проявляет обратное движение при линейном движении центра давления от направления на цель после исходного движения в направлении к ней, что отсутствует в общем типе;
при общем типе генерирования и передачи энергии вспомогательной передней плоскости, когда центр давления не выполняет движение в обратную сторону после первого движения в направлении цели, в случае когда для свинга требуется максимальная скорость головки клюшки, игрок должен двигаться таким образом, чтобы его или ее центр давления в направлении цели имел максимальную длину линейного движения и имел максимальную линейную скорость;
при общем типе генерирования и передачи энергии вспомогательной передней плоскости, в случае когда происходит обратное движение центра давления после его первого движения в направлении цели, когда во время свинга требуется обеспечить максимальную скорость головки клюшки, игрок должен перемещаться таким образом, чтобы его или ее траектория центра давления вначале имела максимальную линейную скорость в направлении цели и затем имела максимальную линейную скорость в обратном направлении от цели.
21. Устройство по п.15, в котором устройство включает в себя средство обработки и средство детектирования; причем средство детектирования выполнено с возможностью детектирования силы реакции земли и включает в себя неподвижную поверхность и средство датчика; и
a) устройство включает в себя средство искусственного интеллекта;
b) средство обработки включает в себя средство ранней обработки, и информация из средства датчика или средства детектирования может быть обработана средством ранней обработки с получением данных, которые лучше характеризуют свинг, прежде чем они будут получены средством искусственного интеллекта;
c) средство искусственного интеллекта выполнено с возможностью приема и обработки информации из средства ранней обработки.
22. Устройство по п.15, в котором
средство датчика выполнено с возможностью определения скорее отклика нагрузки, чем отклика деформации для неподвижной поверхности;
средство датчика содержит множество датчиков, и некоторая информация от некоторых датчиков обрабатывается отдельно от некоторой информации из других датчиков; и
информация из средства датчика или средства детектирования обрабатывается средством ранней обработки для получения данных, которые лучше характеризуют свинг, перед тем, как они будут приняты средством искусственного интеллекта, с использованием всех или комбинации следующих техник:
a) сглаживания потока данных, например, путем использования арифметического скользящего среднего;
b) масштабирования для обеспечения сравнимых показаний между разными датчиками;
c) стабилизации температуры для исключения ошибок из-за изменения температуры;
d) стабилизации напряжения для исключения ошибок в результате изменения напряжения в системе;
e) преобразования в положения Х и Y СОР для отдельной ступни или комбинации поперек обеих ступней;
f) преобразования в скорости Х и Y СОР для отдельной ступни или комбинации поперек обеих ступней; и
g) преобразования ускорений Х и Y СОР для отдельной ступни или комбинации поперек обеих ступней.
23. Устройство по п.21, в котором средство искусственного интеллекта содержит одну или больше тренированных искусственных нейронных сетей; и отдельные сети используются для прогнозирования других параметров энергии.
24. Устройство по п.15, в котором параметры энергии автоматически анализируются или оцениваются с использованием выбранных из следующих техник:
a) оценка или анализ в свете правил оптимизации;
b) оценка или анализ путем сравнения свингов, выполненных игроками-экспертами;
c) оценка или анализ при использовании относительно незашумленного способа;
d) оценка или анализ путем сравнения с другими свингами того же игрока; и
е) оценка и анализ на основе безопасности здоровья.
25. Устройство по п.21, в котором параметры энергии автоматически анализируются или оцениваются путем использования относительно незашумленного способа, где способ относится к анализу уровня шумов прогнозируемых выходных параметров сети для свинга или части свинга, и получают лучшие характеристики при пониженном уровне шумов; и
анализ включает в себя выбор из следующих свойств:
a) выполняют сравнение с уровнем отсутствия шумов эталонного свинга или другого эталонного значения;
b) выполняют сравнение с эталонным свингом на основе игры игроков-экспертов;
c) устанавливают уровни шумов как меру хорошего качества подгонки или качества подгонки необработанных выходных данных к сглаженным выходным данным; и
d) анализ или оценку используют для выделения относительных слабых мест или сильных мест на разных пороговых уровнях при выполнении свинга.
27. Устройство по п.21, которое содержит средство интерактивной тренировки и средство передачи данных, выбранные из следующих средств:
а) средство интерактивной тренировки выполнено с возможностью связи со средством обработки для предоставления игроку автоматической интерактивной тренировки; средство интерактивной тренировки подсказывает тренировочные элементы, и средство передачи данных передает эти тренировочные элементы игроку;
b) элементы интерактивной тренировки заранее подготовлены экспертами, хорошо знакомыми с таким генерированием и передачей энергии во время свинга, с тем, как их можно улучшить и как эти улучшения могут быть эффективно переданы игроку; и
c) средство обработки выполнено с возможностью обработки параметров энергии из информации датчиков, полученной из средства детектирования, обработки информации из средства искусственного интеллекта, анализа результатов, обработки процедуры интерактивной тренировки упражнения и связи со средством передачи данных.
28. Устройство по п.15, в котором
средство детектирования содержит две платформы или секции подушки, которые во время работы отдельно измеряют силы реакции земли для левой и правой ступней игрока.
29. Устройство по п.15, которое включает в себя средства, выбранные из следующих:
a) средство для определения параметров для анализа свинга в гольфе, включающее в себя предшествующий этап определения тех параметров, которые являются важными для анализа свингов в гольфе, включающих в себя параметры, которые относятся к генерированию и передаче энергии через тело, когда выполняют свинги;
b) средство для идентификации параметров для анализа свинга в гольфе, включающее в себя предшествующий этап идентификации параметров, которые являются важными для анализа свингов в гольфе, включающих в себя те параметры, которые относятся к генерированию и передаче энергии через тело, когда выполняют свинг;
c) средство определения параметров энергии, которое выполнено с возможностью определения параметров, включающих в себя предшествующий этап определения параметров энергии, при этом средство параметров энергии также выполнено с возможностью определения измеряемых параметров, из которых могут быть определены параметры энергии;
d) средство идентификации параметров энергии, выполненное с возможностью идентификации параметров, включающих в себя предшествующий этап идентификации параметров энергии, причем средство идентификации параметров энергии также выполнено с возможностью идентификации измеряемых параметров, из которых могут быть определены параметры энергии;
e) средство анализа, выполненное с возможностью анализа свинга в гольфе, включающее в себя предшествующий этап определения правил оптимизации; и
f) средство анализа, выполненное с возможностью анализа свинга в гольфе, включающее в себя предшествующий этап идентификации правил оптимизации.
| US 2007192045 A1, 16.08.2007 | |||
| JP 06142260 A, 24.05.1994 | |||
| Газометрический способ измерения механического недожога топлива | 1991 |
|
SU1810724A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ МАТЕРИАЛЬНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ СПОРТИВНЫХ СОСТЯЗАНИЙ ИЛИ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО И ТВОРЧЕСКОГО ПОТЕНЦИАЛА СПОРТСМЕНОВ | 2002 |
|
RU2254895C2 |

