Настоящее изобретение относится к способу и устройству для измерения связанных со ступнями сил в ходе замаха при игре в гольф или замаха в других видах спорта, который аналогичен замаху при игре в гольф.
Общепринято то, что характеристики смещения веса игрока в гольф в ходе замаха для удара имеют существенную взаимосвязь с силой и точностью замаха. Тем не менее, несмотря на его известную важность, считалось трудным использовать смещение веса в ходе обучения или тренировки, поскольку ни игрок в гольф, ни наблюдатель не может надлежащим образом измерить характеристики смещения веса в ходе быстрого замаха при игре в гольф. Помимо этого, эта взаимосвязь обычно неправильно понимается, и соответствующие процедуры, связанные со смещением веса, традиционно изучались больше методами проб и ошибок, чем обучением.
В предшествующем уровне техники предлагались различные устройства, которые заявлены для измерения и анализа характеристик замаха при игре в гольф посредством измерения сил, прикладываемых посредством ступней игрока. Тем не менее, полагаем, что ни одно из этих устройств не предоставляет реальную выгоду или помощь обычному игроку в гольф.
Патент США 5150902 и Патент США 5118112 раскрывают устройства, где неподвижная поверхность содержит две небольших перемещающихся чувствительных к силе подкладки, на которых размещаются ступни. Эти подкладки предотвращают измерение или анализ естественных положений ступней и предлагают нереалистичное и отвлекающее положение игроку. Ни одно из описаний изобретения не раскрывает датчики силы, которые являются практичными или допускают точное измерение релевантных составляющих силы. Ни одно из описаний изобретения не раскрывает способы или средства, посредством которых замах анализируется или сообщается обычному игроку в подходящем или пригодном формате.
Патент США 5697791 и Патент США 6225977 раскрывают устройства, в которых неподвижная поверхность содержит одну платформу, которая содержит специальные разметки, на которых стоит игрок. Аналогично подкладкам, эти отметки не измеряют или не анализируют естественные положения ступней и предлагают нереалистичное и отвлекающее положение игроку. Описания изобретений указывают, что анализ ограничен отслеживанием общего центра тяжести игрока, что недостаточно для надлежащего анализа замаха. Ни одно из описаний изобретения не раскрывает способы или средства, посредством которых результаты сообщаются обычному игроку в подходящем или пригодном формате.
Помимо вышеописанного, в предшествующем уровне техники распространено наличие созданных различных приборов, которые обязательно управлялись техническими специалистами или экспертами, в которых действующие на ступни силы в ходе замаха при игре в гольф измерялись посредством силовой пластины или устройств с нажимной подкладкой, иногда вместе с устройствами видеоанализа. Результаты типично передавались как визуальные графики, иллюстрирующие изменения силы, и требовали субъективной интерпретации технических специалистов или экспертов. Эти приборы дорогие и формировали результаты, которые практически непригодны или не использовались обычным игроком в гольф.
Настоящее изобретение преодолевает эти различные недостатки предшествующего уровня и предоставляет способ и устройство, которое надлежащим образом измеряет и анализирует действующие на ступни силы в ходе замаха при игре в гольф таким образом, что результаты сообщаются обычному игроку в гольф в подходящем и пригодном формате. Настоящее изобретение также предоставляет устройство, которое может быть изготовлено с небольшими затратами и подходит для управления обычным игроком в гольф с помощью или без помощи стороннего специалиста.
Аспект настоящего изобретения связан с пониманием того, что комплексные силы ступней, которые возникают в результате перемещения игрока, могут быть эффективно проанализированы посредством измерения и анализа равнодействующих вертикальных сил, прикладываемых игроком в общем, а также отдельно левой и правой ступней игрока. Упрощение комплексного перехода к этим равнодействующим силам предоставляет возможность измерения и эффективного выполнения анализа.
Дополнительный аспект изобретения связан с пониманием того, что относительные позиции и перемещения равнодействующих вертикальных сил имеют большое значение, в частности позиции и перемещения относительно позиций ступней.
Дополнительный аспект изобретения связан с пониманием того, что позиция равнодействующей силы может быть определена посредством поддержки этих сил, что приводит к равнодействующей силе, на структурной опорной поверхности; распределения поддерживаемых сил на датчики силы в дискретных позициях, поддерживающих поверхность; и применения уравновешивающего разрешения сил, измеряемых посредством датчика силы в дискретных позициях, чтобы определить модуль и позицию равнодействующей силы.
В рамках данного описания исполнение или применение "уравновешивающего разрешения" (разрешение равновесия) сил относится к исполнению или применению одного или более любых из следующих хорошо известных и тесно связанных принципов либо принципов, которые имеют эквивалентный эффект: сумма любого уравновешенного множества сил равна нулю; сумма любого уравновешенного множества сил, спроецированного на общую плоскость, также равна нулю; сумма моментов любого уравновешенного множества сил также равна нулю, при этом моменты берутся вокруг общей точки; сумма спроецированных моментов любого уравновешенного множества сил также равна нулю, при этом моменты проецируются на общую плоскость, и при этом моменты берутся вокруг общей точки или общей линии, перпендикулярной общей плоскости.
Данные выражения релевантны для устройства в том, что силы ступней уравновешиваются посредством поддерживающих сил в датчиках, а также уравновешиваются посредством составляющих сил. В общем, релевантные силы ступней, поддерживающие силы и составляющие силы являются вертикальными силами, а общие плоскости являются вертикальными плоскостями.
Устройства предшествующего уровня техники зачастую базировались на фиксированных подкладках или размеченных зонах на неподвижных поверхностях, которые задавали позиции ступней игрока.
Дополнительный аспект изобретения связан с пониманием того, что действующие на ступни силы предпочтительно измеряются в ходе замаха при игре в гольф, когда ступни игрока помещены в естественное положение, как должно происходить в ходе обычной игры или тренировки, идеально, при этом игрок выбирает свое положение с минимальным ограничением или допущением позиций ступней. Это предоставляет несколько преимуществ, в том числе следующее. Это позволяет игроку лучше имитировать обычную игру или тренировку. Это устраняет неудобство от необычных позиций или пометок для ступней. Это позволяет игроку повторять те же ошибки, которые он делает при реальной игре, и позволяет устройству анализировать и помогать в исправлении этих ошибок. Это позволяет игроку экспериментировать с различными позами.
В предпочтительном варианте осуществления настоящего изобретения игрок стоит на неподвижной поверхности, которая в достаточной степени является большой для того, чтобы охватывать стандартный диапазон различных поз. В дополнительном усовершенствовании данного аспекта изобретения способ и устройство функционируют так, чтобы вычислять или определять выбранные позиции ступней игрока на неподвижной поверхности. Это предоставляет несколько важных дополнительных преимуществ. Во-первых, знание позиции ступней дает возможность равнодействующим силам на ступню быть более точно проанализированными. Во-вторых, это позволяет устройству оценивать выбранные позиции ступней игрока посредством сравнения их с общепринятыми правильными позициями. В-третьих, это позволяет устройству обнаруживать изменения позиции ступней в ходе замаха.
В данном описании способ и устройства поясняются для игрока, который ударяет по мячу в направлении справа налево, что является типичным для праворуких игроков, выполняющих замах при игре в гольф. Компоновка зеркального отображения применяется к способу и устройству для игрока, который ударяет по мячу слева направо. В некоторых частях описания и формулы изобретения ступня, ближняя к цели, или в направлении, в котором ударяется мяч, может упоминаться как передняя ступня, а другая ступня может упоминаться как задняя ступня.
Далее изобретение описывается подробнее со ссылкой на прилагаемые чертежи, которые иллюстрируют устройство, подходящее для измерения и анализа связанных со ступнями сил в ходе замаха при игре в гольф.
Фиг.1 иллюстрирует схематичный вид сверху устройства, которое включает в себя неподвижную поверхность и игральный мат. Неподвижная поверхность содержит платформу для левой ступни и платформу для правой ступни. Каждая платформа для ступни поддерживается снизу в четырех позициях по углам. Местоположения этих поддерживающих позиций показаны на чертеже, хотя они фактически не видны в представлении сверху. Чертеж также иллюстрирует контуры ступней игрока в типичных позициях. Чертеж дополнительно иллюстрирует мяч, причем мяч, игральный мат и неподвижная поверхность размещаются в относительных позициях, подходящих для ударов продолговатой клюшкой, такой как длинная клюшка.
Фиг.2 иллюстрирует вид платформы для левой ступни, аналогичный показанному на фиг.1, но в большем масштабе. Этот вид показывает центральные позиции средства восприятия, размещенного в четырех угловых позициях. Вид также показывает равнодействующую силу L, прикладываемую посредством ступни на платформу, вместе с поперечным и продольным расстоянием от центров средства восприятия.
В данном описании термины "продольный" и "продольно" должны ссылаться на горизонтальное направление "спереди-назад", а термины "поперечный" и "поперечно" должны ссылаться на горизонтальное направление "бок-бок" под 90° к продольному направлению.
Фиг.3 иллюстрирует вид неподвижной поверхности и контуры ступней, аналогично показанным на фиг.1. Этот вид также иллюстрирует равнодействующие силы L и R, прикладываемые посредством левой ступни и правой ступни на левую и правую платформу, соответственно, и общую равнодействующую силу W, прикладываемую игроком. Вид также иллюстрирует продольное расстояние между силами и центральными позициями средства датчика и относительные поперечные расстояния между силами. Верхняя часть вида дополнительно иллюстрирует поперечные расстояния между общей равнодействующей силой и центрами платформ.
Фиг.4 иллюстрирует вид контура левой ступни на платформе, аналогичный показанному на фиг.2, но в большем масштабе. Этот вид иллюстрирует различные критерии моделирования, составленные из анализа пакета данных по равнодействующей силе, связанных с позицией ступней.
Фиг.5 иллюстрирует вид, аналогичный фиг.4, но включающий в себя равнодействующую силу L и ее модельные составляющие LT и LH.
Фиг.6 иллюстрирует вид, аналогичный фиг.2, но включающий в себя силы L, LT и LH, показанные на фиг.5, вместе с продольными расстояниями между ними.
Фиг.7a иллюстрирует вид в поперечном разрезе сбоку, по Y-Y на фиг.7b, средства восприятия, которое функционирует так, чтобы измерять вертикальную силу, прикладываемую к нему.
Фиг.7b иллюстрирует вид в поперечном разрезе сбоку, по X-X на фиг.7a, средства восприятия, которое показано на фиг.7a.
Фиг.8a иллюстрирует вид в поперечном разрезе сбоку, по Y-Y на фиг.8b, альтернативного средства восприятия, которое функционирует так, чтобы измерять вертикальную силу, прикладываемую к нему.
Фиг.8b иллюстрирует вид в поперечном разрезе сбоку, по X-X на фиг.8a, альтернативного средства восприятия, которое показано на фиг.8a.
Фиг.9a иллюстрирует вид снизу платформы для ступни со смещенной жесткостью.
Фиг.9b иллюстрирует вид в разрезе сбоку, по X-X на фиг.9a, платформы для ступни, показанной на фиг.9a.
Фиг.9c иллюстрирует вид в разрезе сбоку, по Y-Y на фиг.9a, платформы для ступни, показанной на фиг.9a.
Фиг.10 - это блок-схема, иллюстрирующая линии связи между средством восприятия, вычислительным средством и средством связи.
Далее приведен указатель номеров ссылок, используемых на чертежах:
1 - устройство;
2 - неподвижная поверхность;
3 - платформа для левой ступни;
4 - платформа для правой ступни;
5 - позиция датчика;
6 - контур левой ступни;
7 - контур правой ступни;
8 - игральный мат;
9 - мяч;
10 - местоположение разделительного элемента;
11 - средство восприятия/датчик вертикальной силы;
12 - тензометр в сборе;
13 - тензометрический элемент, растянутый под нагрузкой;
14 - тензометрический элемент, сжатый под нагрузкой;
15 - элемент или балка растяжения;
16 - консольный опорный элемент;
17 - гибкий элемент;
18 - крепежное средство;
19 - опорная пластина платформы;
20 - основание устройства;
21 - опора с датчиком силы;
22 - поперечное ребро/жесткий элемент;
23 - продольное ребро/жесткий элемент;
24 - поверхность платформы для ступни;
25 - гнездо для датчика;
26 - вычислительное средство;
27 - средство связи.
Следующие обозначения даны позициям датчиков вертикальной силы, показанных на чертежах:
LFL - левая платформа, передняя левая;
LFR - левая платформа, передняя правая;
LBL - левая платформа, задняя левая;
LBR - левая платформа, задняя правая;
RFL - правая платформа, передняя левая;
RFR - правая платформа, передняя правая;
RBL - правая платформа, задняя левая;
RBR - правая платформа, задняя правая.
Далее делается ссылка на фиг.1 и фиг.2, которые иллюстрируют вид сверху неподвижной поверхности. Неподвижная поверхность содержит расположенные рядом левую и правую платформы, каждая из которых выступает в качестве опорной конструкции, содержащей поверхность или активную поверхность. Поверхность, или активная поверхность, обеспечивает требуемую часть неподвижной поверхности. Каждая платформа поддерживается посредством четырех средств восприятия (датчика) вертикальной силы, которые упоминаются как датчики, каждое из которых размещено под вертикальной платформой рядом с одним из углов. Позиции датчиков показаны на чертеже, хотя они фактически не видны в представлении сверху. Любая нагрузка, прикладываемая к платформам, распределяется на датчики.
Платформы для ступней являются прямоугольными или квадратными при виде сверху. Датчики размещаются симметрично под платформами для ступней. Центры четырех передних датчиков являются коллинеарными, как и центры четырех задних датчиков. Центр каждого переднего датчика также поперечно совмещен с центром соответствующего заднего датчика.
Размещение датчиков таким симметричным способом предоставляет несколько преимуществ. Это упрощает математические вычисления. Это также приводит к аналогичному диапазону нагрузок и номинальных нагрузок для всех датчиков. Это обеспечивает то, что все нагрузки датчиков всегда являются положительными вертикальными направленными вниз силами.
Чертежи также иллюстрируют контуры обуви или ступней игрока, стоящего на платформе.
Фиг.2 иллюстрирует укрупненный вид левой платформы, показанной на фиг.1. Центры передних датчиков продольно отстоят на расстояние "c" от центров задних датчиков.
Центры левых датчиков в поперечном направлении отстоят на расстояние "d" от центров правых датчиков. Чертеж также иллюстрирует позицию равнодействующей силы вниз "L", прикладываемой посредством левой ступни игрока к передней пластине. Эта сила отстоит на расстояние "a" в продольном направлении от центров передних датчиков и на расстояние "b" в поперечном направлении от центров левых датчиков.
Следующие обозначения даны вертикальным силам, прикладываемым к каждому датчику, для удобства совпадающие с обозначениями, данными позициям датчиков, показанным на чертежах:
LFL - левая платформа, передняя левая;
LFR - левая платформа, передняя правая;
LBL - левая платформа, задняя левая;
LBR - левая платформа, задняя правая;
RFL - правая платформа, передняя левая;
RFR - правая платформа, передняя правая;
RBL - правая платформа, задняя левая;
RBR - правая платформа, задняя правая.
В рамках описания и формулы изобретения, если не заявлено иное, все силы относятся к вертикальным силам или вертикальным составляющим сил. Также ссылки на силы могут иногда взаимозаменяемо означать действующую вертикально вниз силу либо соответствующую ей действующую вертикально вверх противодействующую силу. Кроме того, силы, которые возникают в результате множества составляющих сил, могут иногда, хотя и не всегда, упоминаться как равнодействующие силы.
Модуль L известен, поскольку:
L=(LFL+LFR+LBL+LBR).
Разрешение равновесия сил в продольном направлении относительно линии через LFL и LFR дает следующее:
(LFL+LFR+LBL+LBR)×a=(LBL+LBR)×c.
Следовательно, a=(LBL+LBR)×c/(LFL+LFR+LBL+LBR).
Уравновешивающее разрешение (разрешение равновесия) сил в поперечном направлении вдоль линии через LFL и LFR дает следующее:
(LFL+LFR+LBL+LBR)×b=(LFR+LBR)×d.
Следовательно, b=(LFR+LBR)×d/(LFL+LFR+LBL+LBR).
Поскольку c и d - это известные константы, а LFL, LFR, LBL и LBR известны из измерений датчиков, позиция L, представленная посредством размеров a и b, известна.
Позиция и модуль общей равнодействующей силы на обеих платформах, обозначенной W, также могут быть легко определены.
Модуль W=L+R=(LFL+LFR+LBL+LBR)+(RFL+RFR+RBL+RBR).
Далее делается ссылка на фиг.3, которая иллюстрирует вид неподвижной поверхности и контуров ступней, аналогично показанному на фиг.1 и фиг.2. Вид иллюстрирует центральные позиции датчиков, размещенных в четырех угловых позициях каждой из платформ. Вид также иллюстрирует равнодействующие силы L и R, прикладываемые посредством левой и правой ступни на соответствующие платформы, соответственно, и общую равнодействующую силу W, прикладываемую игроком. Вид также иллюстрирует продольное расстояние между силами и центральными позициями датчиков и относительные в поперечном направлении расстояния между силами.
Поскольку по определению L и R уравновешены вокруг их равнодействующей W, они могут быть разрешены в любом направлении вокруг W. Уравновешивающее разрешение в продольном направлении дает следующее:
(LFL+LFR+RFL+RFR)×n=(LBL+LBR+RBL+RBR)×(c-n),
где c - это известное продольное расстояние между известными передним и задним датчиками. Это дает продольную позицию W.
Поперечная позиция W может быть найдена посредством разрешения равновесия R и L вокруг W, используя известные поперечные позиции R и L.
Ссылаясь снова на фиг.3:
L×k=R×(m-k), следовательно, k=m/(1+L/R).
Расстояние m известно, поскольку поперечные позиции L и R известны. Следовательно, поперечная позиция силы W может быть определена.
Альтернативный, но менее точный, способ включает в себя разрешение равновесия сил R и L вокруг W, но при допущении, что они действуют через центры соответствующих платформ. Это дает положительные позиции равнодействующей силы, что может быть допустимо для некоторых вычисленных результатов. Потенциальное преимущество этого заключается в том, что она может быть вычислена просто из модулей показаний датчика без необходимости вычислять позиции L и R. Снова ссылаясь на фиг.3, верхняя область вида также иллюстрирует поперечные расстояния между общей равнодействующей силой и центрами платформ. Разрешение равновесия W в поперечном направлении вокруг этих платформ дает следующее:
L×p=R×(q-p), следовательно, p=R/L×(q-p), следовательно, p×(1+R/L)=q×R/L, следовательно, p=q×R/L/(1+R/L)=q×R/(R+L)=q/(1+L/R),
где p - это поперечное расстояние для W от центра левой платформы, а q - это известное фиксированное поперечное расстояние между центрами платформ.
Само по себе знание равнодействующей силы, прикладываемой посредством ступни, ограниченно применятся в оценке игры. Вертикальная сила вниз распространяется по одной или более областям ступни, и некоторое внимание должно быть уделено распределению этой силы относительно общей позиции ступни. Соответственно, дополнительная цель изобретения влечет за собой определение способов, которые преобразуют знание модуля и позиции равнодействующей силы в применимые определения распределения силы относительно общей позиции ступни.
В предпочтительном варианте осуществления устройство оснащено вычислительным средством, которое функционирует так, чтобы определять позицию ступни или характеристики позиции ступни посредством статистического анализа набора равнодействующих сил, измеренных посредством датчиков, когда игрок смещает вес с помощью ступни в этой позиции.
Если ступня находится в требуемой начальной позиции для замаха, собирается репрезентативная группа выборок позиций равнодействующих сил на платформах. Репрезентативные группы выборок могут удобно собираться посредством приспособления вычислительного средства к возможности инструктировать или требовать от игрока смещать вес на своих ступнях до тех пор, пока не будет измерено достаточное разнесение, критерии для которого подробнее описаны ниже. Когда измеряется замах при игре в гольф, процесс может быть комбинирован с обычными и рекомендуемыми методиками "раскачивания" и "подготовки к удару" игрока в гольф. Когда измерено достаточное разнесение, об этом сообщается игроку посредством визуального или звукового сигнала, и после этого замах может начинаться. Испытания показали, что процесс может быть выполнен за несколько секунд и совместим с типичными действиями раскачивания и подготовки к удару в гольфе, которые занимают примерно столько же времени.
Критерии достаточного многообразия могут быть основаны на эмпирическом знании типичных или релевантных характеристик ступней. Испытания показали, что разнесение примерно 0,63 от длины ступни может быть достигнуто при наибольшем смещении веса "спереди-назад" и примерно 0,54 от длины ступни при небольшом или обычном смещении веса "спереди-назад". Во всех случаях длина ступни означает наибольшую длину ступни, от пальцев до пятки, вдоль длинной оси ступни и не включает в себя обувь. Следовательно, требование может быть задано с разнесением примерно 0,45-0,55 от предполагаемой длины ступни в направлении "спереди-назад" или в направлении линии наилучшего соответствия. Испытания также показали, что разнесение порядка 0,17 от длины ступни может быть достигнуто при небольшом или обычном постоянном смещении веса на отдельную ступню. Следовательно, это требование может быть задано с разнесением примерно 0,10-0,18 от предполагаемой длины ступни в направлении "бок-бок" или ортогонально к направлению линии наилучшего соответствия. Причина обязательности разнесения заключается в том, чтобы обеспечить то, что игрок предоставляет достаточно широкий разброс позиций смещения веса на каждую ступню, которое не может перекашиваться в нехарактерном направлении, например, посредством раскачивания или подготовки к удару по мячу со ступней, повернутой на один бок.
Пакеты выборок статистически анализируются вычислительным средством, чтобы создать соответствующую прямую линию наилучшего соответствия для каждой ступни, примерно соответствующую центральной длинной оси ступней, идущей от примерно центральной зоны пятки до соответствующей примерно центральной зоны пальцев. Пакет выборок может быть сформирован посредством выборки и регистрации значений равнодействующих сил с регулярными интервалами, например примерно каждую миллисекунду. Соответствующая линия наилучшего соответствия может быть вычислена посредством различных широко распространенных статистических методов, которые подходят для работы в вычислительном средстве. В идеале, линия наилучшего соответствия базируется на приближении к предполагаемой границе, в рамки которой попадают равнодействующие силы, и не перекашивается посредством относительной частоты равнодействующих сил, зарегистрированных внутри зон границы. Например, одна равнодействующая сила, зарегистрированная на одной наибольшей стороне границы, должна иметь такое же влияние на позицию линии наилучшего соответствия, как несколько равнодействующих сил, зарегистрированных на противоположной наибольшей стороне границы.
Пакеты выборок также статистически анализируются для того, чтобы определить центральную точку для каждой ступни, которая может быть расположена так, чтобы попадать на линию наилучшего соответствия. Это упоминается как "статистический центр" и примерно соответствует позиции равнодействующей силы, прикладываемой посредством ступни, когда сила центрально уравновешена на ступне, как в случае с тщательно уравновешенной позой. Статистический центр может быть удобно определен как позиция середины на линии наилучшего соответствия между дальними передними и дальними задними значениями, полученными в пакете выборок.
Представление позиции ступни посредством всего лишь двух заголовков, которые могут быть выражены в простых математических терминах, например линия и точка, представляемая посредством линии наилучшего соответствия и статистического центра, значительно упрощает численный анализ замаха вычислительным средством.
Важно убедиться, что игрок случайно не изменяет позицию ступней между моментами времени, когда вычислительное средство передает приемлемость разнесения пакета выборок равнодействующих сил, и началом замаха. Изменение позиции ступней может содержать полное поднятие ступни с платформы для ступней или может содержать плавное перемещение ступни в новую позицию без фактического поднятия с платформы для ступней, или может содержать поворот ступни вокруг подушечек ступни или пятки, но при этом сила остается применяемой посредством поворота части, остающейся на платформе для ступней.
Полное поднятие ступни легко обнаруживается вычислительным средством, поскольку оно заставляет равнодействующую силу уменьшиться до нулевого значения или практически до нулевого значения. Плавное перемещение ступни, когда сила остается на платформе для ступней в течение плавного перемещения, указывается посредством последующего обнаружения равнодействующей силы вне пределов границ равнодействующей, установленных для позиции ступни. Эти пределы границ могут быть заданы как фиксированное взаимоотношение с линией наилучшего соответствия и статистического центра для данного предполагаемого размера ступни. Поворот ступни показывается как возможное событие, когда силы пальцев или пяток падают до нулевого значения или практически нулевого значения. Поворот доказывается, только если равнодействующая затем обнаруживается за пределами границ равнодействующих, установленных для позиции ступни.
В предпочтительном варианте осуществления обнаружение ступни, поднятой после подготовки к удару, но до замаха назад, заставляет вычислительную систему инструктировать или требовать от игрока повторить процедуру предоставления выборки равнодействующих сил до начала замаха. Плавное перемещение или поворот ступни в новую позицию без исключений обнаруживается слишком поздно, чтобы предотвратить начало замаха, и вычислительная система вместо этого оценивает модуль плавного перемещения или поворота с заданными критериями, чтобы принять решение о том, до какой степени результаты анализа остаются допустимыми, и передать результаты соответствующим образом.
Обнаружение и оценка поднятия, плавного перемещения или поворота ступни также важна в ходе других стадий замаха, где они иногда, как считается, составляют ошибку. Вычислительное устройство снабжается релевантными доступными справочными данными, чтобы помогать в оценке обнаруженного перемещения ступней.
Равнодействующая сила на ступню может ссылаться на позицию ступни различными способами. В одном относительно простом варианте осуществления позиция равнодействующей ссылается на позицию линии наилучшего соответствия и на вторую ось, ортогональную к линии наилучшего соответствия и проходящую через статистический центр. Таким образом, равнодействующая сила оценивается так, чтобы быть в нейтральной или уравновешенной позиции при приложении к статистическому центру, чтобы перемещаться постепенно в поперечном направлении влево или вправо, когда она перемещается влево или вправо по линии наилучшего соответствия, или перемещаться постепенно к пальцам или пяткам, когда она перемещается постепенно вперед или назад по ортогональной линии через статистический центр.
Хотя представление сил на ступне посредством одной равнодействующей силы, ссылающейся на позицию ступни, имеет преимущество математической простоты, тем не менее, это есть концепция, которую иногда трудно сообщить обычному игроку в гольф, в частности, когда игрок в гольф незнаком с математическими или научными методиками. Многие игроки в гольф считают, что проще понять идею веса на пальцах или пятках либо проценты веса на пальцах и пятках. В действительности, действующая вертикально вниз сила, прикладываемая посредством ступни игрока в гольф, фактически не действует на одну равнодействующую точку или в дискретных частях пальцев и пятки, и оба представления, как считается, имеют равную научную обоснованность.
В дополнительном аспекте изобретения равнодействующая сила ступни выражается относительно составляющих пятки и пальцев, и ниже приводится пример методики, которая подходит для обработки посредством вычислительного средства. Эта методика может быть использована в качестве основной или вспомогательной для помощи при анализе замаха и сообщении результатов игроку.
В рамках описания и формулы изобретения, когда делается ссылка на силы на "пальцах" и "пятке", это следует понимать как ссылка на то, что иногда называется силами "спереди" и "сзади" ступни, соответственно, причем эти термины, в общем, являются взаимозаменяемыми. Кроме того, если делается ссылка на составляющие от пальцев или пятки равнодействующей силы, прикладываемой посредством ступни, следует понимать, что эти ссылки также могут применяться к эквивалентам этих сил, вычисленных посредством любой соответствующей методики, в том числе вышеупомянутой методики, где позиция одной равнодействующей силы на ступни ссылается на позицию ступни.
В предпочтительном варианте осуществления с помощью идеи передних и задних составляющих силы равнодействующая сила на ступню разделяется на переднюю и заднюю составляющую вертикальной силы, причем эти составляющие являются параллельными и копланарными с результатом. Для удобства эти составляющие далее упоминаются как составляющие "пальцев" и "пятки", обозначенные LT и LH, если релевантны для левой ступни, и RT и RH, если релевантны для правой ступни. При просмотре сверху копланарная равнодействующая и ее составляющие выглядят как коллинеарные точки. Кроме того, для удобства пояснения далее термин "коллинеарный" используется для того, чтобы описывать коллинеарный или копланарный аспект этих составляющих.
Различные математические модели могут быть использованы для того, чтобы разделить равнодействующие на релевантные коллинеарные составляющие пальцев и пяток, когда определенные сведения по общей позиции ступни известны. Пример такой модели моделирует в большей степени поперечное движение качения ступни вокруг мяча и пятки, наряду с длинной осью ступни. Пример проиллюстрирован на фиг.4 и фиг.5.
Фиг.4 иллюстрирует вид контура левой ступни на платформе для ступни, аналогичный показанному на фиг.2, но в большем масштабе. Этот вид иллюстрирует критерии моделирования, составленные из анализа пакета данных по равнодействующей силе, связанных с позицией ступни, включая линию наилучшего соответствия, показанную как линия "xx", и статистический центр, показанный как "A" на чертеже. Фиг.5 иллюстрирует вид, аналогичный фиг.4, но включающий в себя равнодействующую силу L и ее модельные составляющие LT и LH.
Большей частью поперечное движение качения выполняется вокруг заднего центра вследствие того, что эффективный диаметр качения подушечек ступни больше фактического диаметра качения пятки. Модель отражает относительно жесткие характеристики ступни и обуви игрока между зонами пятки и подушечек ступни и предоставляет удовлетворительную оценку типичных характеристик ступни.
На основе эмпирического знания типичных или релевантных характеристик ступни линия пятки может быть определена в заранее определенном соотношении с линией наилучшего соответствия и статистическим центром. Линия пятки аппроксимируется на геометрическое место центра действующей вниз силы, когда игрок прикладывает весь свой вес к самым задним позициям пятки. Например, линия пятки может быть определена как прямая линия, ортогональная к линии наилучшего соответствия, и на заданном заранее определенном расстоянии, скажем, примерно 0,35 от предполагаемой длины ступни или между 0,30 и 0,40 от предполагаемой длины ступни, от задней части статистического центра. Линия, если этого типа, показана как центральная зона линии "hh" на чертеже. Также на основе эмпирического знания типичных или релевантных характеристик ступни линия пятки также может быть определена в заранее определенном соотношении с линией наилучшего соответствия и статистическим центром. Линия пятки аппроксимируется на геометрическое место центра действующей вниз силы, когда игрок прикладывает весь своей вес к самым передним позициям на подушечках ступни и пальцев. Например, линия пальцев может быть определена как прямая линия, лежащая под заранее определенным углом, скажем, примерно 60º к линии наилучшего соответствия, и пересекающая ее на заранее определенном расстоянии вперед, скажем, примерно 0,35 от предполагаемой длины ступни или между 0,30 и 0,40 от предполагаемой длины ступни, от статистического центра. Углы отсчитываются в противоположных направлениях вращения для правой ступни и левой ступни. Линия этого центра показана как центральная зона линии "tt" на чертеже. Кроме того, на основе эмпирического знания типичных и релевантных характеристик ступни общая точка может быть определена в заранее определенном соотношении к линии наилучшего соответствия и статистическому центру, которая выступает в качестве заднего центра вращения для качения ступни и является коллинеарной с каждой равнодействующей и ее составляющими от пальцев и пятки для конкретной общей позиции ступни. Например, этот центр вращения может быть определен как точка, которая лежит на линии наилучшего соответствия на заданном расстоянии, скажем, примерно 0,80 от предполагаемой длины ступни или между 0,65 и 1,00 от предполагаемой длины ступни, сзади от статистического центра выборки. Точка этого типа показана как "B" на чертеже.
Необязательно, различные параметры моделирования могут варьироваться с характеристиками игрока, такими как размер обуви, вес, пол или возраст игрока. Некоторые параметры игрока могут быть получены напрямую посредством устройства. Например, вес игрока может быть узнан немедленно из статической суммы равнодействующих сил на платформе.
Составленная таким образом модель может быть использована для того, чтобы определять позицию и модуль составляющих от пальцев и пятки любой равнодействующей силы, возникающей для одной общей позиции ступни. Если новая равнодействующая сила L возникает, определяется линия, которая проходит через L и центр вращения B. Позиции ее составляющих пальцев и пяток, LT и LH, определяются как пересечения, которые точны с линией пальцев tt и линией пятки hh, соответственно. Это проиллюстрировано на фиг.5, которая показывает такую же позицию ступни и модель, как показана на фиг.4. Линия показана как "yy" на чертеже.
Модули составляющих LT и LH находятся посредством разрешения равновесия составляющих вокруг равнодействующей L. Ссылаясь теперь на фиг.6, относительные позиции L, LT и LH проиллюстрированы спроецированными на продольную ось. LT разнесен на расстояние g продольно от LH и на расстояние f продольно от L. Значения g и f известны, поскольку позиции LT и LH известны из модели. Поскольку по определению LТ и LH уравновешены вокруг их равнодействующей L, они могут быть разрешены в любом направлении вокруг L. Разрешение в продольном направлении дает следующее:
(LT)×f=(LH)×(g-f), следовательно, (LH)=(L)×(f/g).
Кроме того, LT=L-LH.
Поскольку L, f и g известны, следовательно, модули LT и LH известны.
В рамках описания и формулы изобретения термины "продольный совмещенный со ступней" и "продольно совмещенный со ступней" должны относиться к горизонтальному направлению, совмещенному с длинной осью ступни, а термины "поперечный совмещенный со ступней" и "поперечно совмещенный со ступней" должны относиться к горизонтальному направлению "бок-бок" под 90° к продольному совмещенному со ступней направлению. В зависимости от выбранного метода вычисления длинная ось может содержать центральную ось наилучшего соответствия или она может содержать релевантную длинную ось, проходящую через центр вращения B.
В предпочтительном варианте осуществления средство восприятия содержит датчик силы с тензометром, причем каждый датчик содержит два противостоящих тензометрических элемента. Пример датчика этого типа, подходящего для использования в устройстве, показан на фиг.7a и 7b. Датчик размещается под опорной точкой на платформах и функционирует так, чтобы формировать электрический сигнал выходного напряжения, который варьируется с прикладываемой вертикальной нагрузкой. Датчик содержит простой надежный металлический элемент или стержень растяжения, один конец которого прочно крепится к надежному консольному опорному элементу, который крепится к основанию устройства. Другой конец стержня аналогично прочно крепится ко второму надежному опорному элементу, который крепится к гибкому элементу, который, в свою очередь, крепится к платформе. Эти две противостоящие консольные конструкции, вместе с гибким элементом, позволяют практически вертикальной силе, применяемой к датчику силы, быть переданной на основание без приложения значительных изгибающих сил или боковых сил к основанию или платформе. Гибкий элемент может содержать, например, формовку из твердого эластомера или, альтернативно, металлический либо полимерный пружинный элемент. Две противостоящие консольные конструкции остаются практически параллельными, когда прикладывается вертикальная сила, и стержень слегка деформируется с помощью двух пологих изгибов, по одному к каждой стороне от центра на одной поверхности, заставляя поверхность на одной стороне от центра быть немного растянутой, а зону поверхности на другой стороне от центра быть немного сжатой.
Датчик содержит два совпадающих тензометрических элемента в тензометре в сборе, которые прикреплены к одной поверхности стержня растяжения, причем тензометрические элементы размещаются на любой стороне от центра поверхности стержня растяжения так, чтобы один растягивался, а другой сжимался, когда нагрузка прикладывается к датчику, заставляя один понизить, а другой увеличить сопротивление.
Два тензометрических элемента соединены в конфигурации моста Уитстона с двумя фиксированными сопротивлениями, чтобы предоставить выходной сигнал, который пропорционален сумме выводов из двух тензометрических элементов.
Использование двух противостоящих тензометрических элементов таким способом имеет несколько преимуществ, в том числе следующее. Это существенно снижает влияние изменений температуры на датчик, поскольку влияние на растянутый элемент компенсирует влияние на сжатый элемент. Аналогично, это также частично снижает влияние изменений напряжения. Это повышает точность за счет удвоения выходного сигнала от датчика. Это также повышает точность за счет усреднения эффекта использования двух, а не одного элемента. Это дополнительно помогает повысить точность за счет формирования номинального нулевого выходного напряжения при отсутствии нагрузки, если мост надлежащим образом сбалансирован, тогда как абсолютное сопротивление одного тензометрического элемента формирует менее определенное выходное напряжение при отсутствии нагрузки.
Фиг.8a и 8b иллюстрируют альтернативный пример датчика силы, который аналогичен по конструкции и работе показанному на фиг.7a и 7b, но отличается тем, что нижняя часть датчика крепится к основанию датчика, а не к основанию устройства, а также отличается тем, что гибкий элемент соединен с нижним консольным опорным стержнем. Эта конструкция имеет относительное преимущество над показанными на фиг.7a и 7b в том, что она не связана с необходимостью иметь основание устройства. Тем не менее, она имеет относительный недостаток в том, что датчики менее надежно поддерживаются и, вероятно, требуют более твердой или более ровной поверхности.
Снова ссылаясь на фиг.1, вид иллюстрирует две платформы для ступни, мяч и игральный мат. Мяч типично располагается в позиции, идущей вдоль практически прямого геометрического места, которое варьируется с длиной клюшки, используемой при замахе. Его самая дальняя позиция, соответствующая той, которая использовалась с длинной клюшкой, находится на линии, которая идет ортогонально к целевому или заданному направлению перемещения мяча из позиции, близкой к позиции внутри пяток игрока, когда ступня игрока размещается по центру на платформе для левой ступни. Его самая внутренняя позиция, соответствующая той, которая использовалась с самой короткой клюшкой, находится на линии, которая идет ортогонально к целевому или заданному направлению перемещения мяча от разделения между двумя платформами для ступней. Расстояние между внутренними частями левой и правой пятки может существенно варьироваться, но обычно не больше ширины плеч игрока в ходе замаха длинной клюшкой, и постепенно уменьшается для замахов более короткими клюшками. Мяч может удерживаться на месте посредством любого подходящего средства, в том числе размещения на колышке для удара или в конкретной точке игральной поверхности. Игральный мат может содержать поверхность, такую как используемая в диапазоне движения в гольфе, и может содержать прочный искусственный дерн. Его поверхность должна быть на том же возвышении, что и поверхность платформ для ступни. Конструкция, показанная на фиг.1, удовлетворяет нормальному диапазону рычагов замаха в гольфе при условии, что мяч перемещается ближе к платформам для ступни для ударов с помощью коротких клюшек. Позиция мяча постепенно перемещается ближе к разделению между платформами по мере того, как мяч размещается ближе к платформе.
Позиция мяча относительно платформ для ступни имеет важность, поскольку устройство оценивает выбранное игроком фиксированное положение относительно мяча, а также оценивает движение и сдвиг веса игрока относительно представляемого целевого или заданного направления полета мяча, которое связано с позицией мяча относительно платформ для ступни. Относительная позиция мяча может задаваться различными способами.
В одном примере игральный мат имеет относительно большой размер, и его позиция фиксирована по отношению к платформам для ступни. Мяч помещается на колышек для удара, который находится в отверстии или в креплении мата. Мат снабжен множеством таких отверстий или креплений, идущих вдоль геометрической линии соответствующих позиций колышка для удара, в зависимости от длины клюшки. В альтернативном примере, игральный мат имеет размер, аналогичный показанному на фиг.1, и удерживается в разнесенном состоянии от платформ для ступни посредством разделительного элемента, который не показан на чертеже, но при этом его местоположение указано. Мяч помещается на колышек для удара, который находится в уникальной позиции на мате. Разделительный элемент функционирует так, чтобы зацеплять мат и основную часть устройства, в том числе платформы для ступни, во множестве позиций, но при этом в каждом случае позиция колышка для удара находится в геометрическом месте надлежащих позиций колышка для удара, используя средство зацепления, например матрицу из наклонно размещенных зубцов, которые зацепляются с соответствующими выемками в мате и основной части устройства.
Платформы содержат структурные опорные поверхности, которые должны быть достаточно прочными и жесткими, чтобы противостоять весу и динамическим силам игрока, выполняющего замах при игре в гольф. Типичные максимальные вертикальные силы, включающие в себя центробежные и противодействующие силы, могут составлять примерно 750 Н на правую ступню и 1000 Н на левую ступню. Платформы для ступни могут быть изготовлены, например, как формовки из полимеров, усиленные с помощью укрепления ребрами на нижней стороне. Верхние поверхности могут быть оснащены гибким захватным материалом, например эластомерным матом.
В предпочтительном варианте осуществления платформа для ступни содержит поверхность, которая имеет различающуюся жесткость в различных ориентациях в горизонтальной плоскости, с повышенной жесткостью вдоль пар наборов датчиков, при этом поверхность должна иметь прочность на изгиб, и со сниженной жесткостью вдоль пар наборов датчиков, где прочность на изгиб не требуется. Например, если платформа поддерживается посредством четырех датчиков, как проиллюстрировано на фиг.2, прочность платформы на изгиб требуется между LFL и LFR, между LBL и LBR, между LFL и LBL и между LFR и LBR. Тем не менее, прочность платформы на изгиб не требуется и нежелательна между LFL и LBR и между LFR и LBL, если датчики размещаются по диагонали относительно друг друга. Прочность на изгиб между этими размещенными по диагонали парами датчиков может приводить к некорректным показания, поскольку они могут не допустить правильное распределение вертикальных сил на датчики, если имеется какая-либо неровность в наземной опоре датчиков или в форме либо габаритах платформы или самих датчиков.
Пример платформы для ступни с различающейся жесткостью показан на фиг.9a, 9b и 9c. Фиг.9a иллюстрирует вид снизу, фиг.9b иллюстрирует вид в разрезе сбоку по X-X, а фиг.9c иллюстрирует вид в разрезе сбоку по Y-Y примера платформы для ступни этого типа, подходящей для использования в устройстве этого типа, показанном на фиг.1. Платформа для ступни содержит два очень прочных и жестких поперечно размещенных жестких элемента, один из которых охватывает два передних датчика, а другой охватывает два задних датчика. Множество продольно размещенных, относительно прочных и жестких, разнесенных жестких элементов охватывают два поперечно размещенных жестких элемента. Поперечно размещенные жесткие элементы по отдельности прочнее, чем продольно размещенные жесткие элементы. Относительно гибкая горизонтальная поверхность соединяет верхние поверхности всех жестких элементов. Платформа изготовляется как одна полимерная формовка, в которой верхняя поверхность формирует горизонтальную поверхность, а целостные ребра формируют жесткие элементы. Гнезда неразъемно формованы в каждом углу, который содержит датчики, и переносят силу с концов поперечно размещенных жестких элементов на верхние поверхности датчика. Гнезда прочно крепятся к поперечно размещенным жестким элементам, которые содержат толстые ребра, неразъемные с формовкой. Продольно размещенные жесткие элементы прочно крепятся к поперечно размещенным жестким элементам и также содержат ребра, неразъемные с формовкой, но имеют меньшую толщину и глубину, чем поперечно размещенные жесткие элементы. Когда сосредоточенная сила прикладывается рядом с центральной зоной платформы, она переносится на соседние нижележащие продольно размещенные жесткие элементы, которые, в свою очередь, распределяют силу на четыре гнезда и соответствующие поддерживающие датчики. Если поддержка для любого из датчиков отклоняется вниз на небольшую величину, то сила датчика остается практически неизменной, поскольку платформа допускает прогиб по диагонали без значительного изменения отдельных сил, применяемых к четырем угловым датчикам. Эта конструкция, разумеется, также может быть аналогично достигнута с двумя продольно размещенными жесткими элементами и множеством разнесенных поперечно размещенных жестких элементов. Эта конструкция также может быть достигнута, если непрерывная поверхность заменена на активную поверхность с отверстиями между частями множества жестких элементов.
В предпочтительном варианте осуществления жесткость основания выполнена с возможностью превышать жесткость платформы для ступни, причем максимальная деформация основания в рабочих условиях соответствует прогибу платформы для ступни в рамках рабочего диапазона с достаточно небольшим сопротивлением прогибу, так что силы, распределяемые на датчики, затрагиваются в незначительной степени.
Устройство также может принимать и обрабатывать дополнительные сигналы от датчиков, которые измеряют горизонтальные силы на платформы для ступни. Добавление этих датчиков к устройству имеет потенциальное преимущество повышения области и точности анализа. Это имеет потенциальный недостаток в том, что это значительно увеличивает стоимость и сложность устройства.
Устройство оснащено вычислительным средством, которое принимает сигналы от датчиков и функционирует так, чтобы измерять, запоминать и анализировать эти сигналы и передавать результаты при необходимости. Сигналы напряжения от датчиков типично могут быть усилены в схемах усилителя и преобразованы из аналогового в цифровой формат в вычислительном средстве, в котором осуществляется последующая обработка сигналов.
Сигналы датчика должны дискретизироваться на достаточно большой частоте, например, по меньшей мере, 1200 сигналов в секунду, и затем преобразовываться в цифровой формат. Сигналы сглаживаются, например, посредством их преобразования в скользящее среднее одного сигнала для кластера или нескольких окружающих значений сигнала. Вычислительное средство идентифицирует конкретные периоды замаха, которые могут быть выгодно проанализированы более подробно по времени, чем другие периоды, например переходный период от замаха назад до маха вниз, и типично анализирует эти периоды наиболее подробно по времени. Другие периоды могут быть проанализированы менее подробно по времени, что позволяет снижать число необходимых вычислений и, тем самым, преимущественно повышать скорость обработки и снижать требования по емкости хранения. Внимание должно быть уделено минимизации отношения "сигнал-шум" в датчиках и связанных схемах, чтобы обеспечить подробное представление по времени сигналов и минимизировать необходимое сглаживание.
Вычислительное средство может содержать, например, электронный процессор или вычислительную машину либо линию связи с процессором, вычислительной машиной или внешней системой, такую как Интернет и другая сеть связи, либо любую комбинацию вышеуказанного. Вычислительное средство также может содержать программное обеспечение, программы, данные и системы, используемые с любым из вышеупомянутых устройств или систем.
Устройство также содержит средство связи, посредством которого результаты измерений и анализа передаются напрямую или косвенно игроку или оператору устройства или другим сторонам или устройствам либо передаются для дополнительного хранения или использования в вычислительном средстве. Косвенная передача включает в себя передачу сигналов или данных в другие устройства, допускающие прямую передачу или дополнительную косвенную передачу.
Фиг.10 - это блок-схема, иллюстрирующая линии связи между средством датчика, вычислительным средством и средством связи. Вычислительное средство связывается со средством датчика и вычислительным средством. Линии связи могут содержать, например, линии радиосвязи либо электрические провода или схемы.
Устройство по изобретению может быть запрограммировано так, чтобы оценивать замах при игре в гольф с помощью любого набора критериев или представлений в отношении того, что составляет хорошие или плохие элементы или способы в замахе. Далее представлен краткий обзор типичного набора этих критериев, релевантных для устройства по настоящему изобретению.
Когда выполняется подготовка к удару по мячу, до обратного замаха, в идеале вес распределяется равномерно между левой и правой ступней. Вес на конце пятки каждой ступни немного больше, чем на конце пальцев. Позиции ступней важны относительно позиции мяча, предназначенного направления полета и типа выполняемого удара. Обычно предпочитается немного открытая поза, чтобы помогать игроку начать удар, когда левая ступня находится под углом примерно 20° против часовой стрелки от позиции "квадрат". Правая ступня типично может размещаться под углом примерно 7° в направлении по часовой стрелке.
Использование крупных мышц ног и тела необходимо при осуществлении надлежащего мощного замаха при игре в гольф. Использование этих мышц приводит к смещению веса, и измерение этого смещения веса преимущественно используется для того, чтобы анализировать надлежащее использование этих крупных мышц в соответствующие моменты времени в ходе замаха. Сохранение равновесия и контроля также очень важно при замахе.
На практике, в ходе надлежащим образом выполняемого замаха вес игрока смещается с уравновешенной позы для удара по мячу к увеличению веса на пальцы левой ступни и пятку правой ступни, при этом все время либо плавно перемещая общий центр тяжести поперечно вправо, либо удерживая его в соответствующем центральном уравновешенном положении, либо в каком-либо сочетании этих двух вариантов. Этот тип надлежащего смещения веса и уравновешивания может отслеживаться посредством измерения конкретных вертикальных сил ступней. Помимо этого, чтобы добиться эффективного и мощного замаха, игроку необходимо сконцентрироваться на контролируемой позе против естественного противодействия в направлении, противоположном целевому, по мере того как клюшка ускоряется в направлении цели. Обратный замах определяет поворот, смещение веса, подъем ноги и подпружинивание мышц до замаха вниз, и если выполнен правило, значительно помогает в развитии правильного маха вниз.
При переходе от обратного замаха к маху вниз перемещение при махе вниз бедер начинается до завершения перемещения при обратном замахе клюшки. Время обратного замаха типично составляет порядка 0,9 секунд. Время от маха вниз до удара типично составляет порядка 0,3-0,4 секунд. При хорошо выполненном замахе обратный замах и мах вниз могут перекрываться в течение примерно 0,1 секунды.
Степень относительного поворота плеч относительно бедер важна в конце обратного замаха. Дополнительное возрастание степени относительного поворота плеч относительно бедер, иногда упоминаемое как "неизвестное растяжение", рассматривается выгодным на ранней стадии маха вниз с точки зрения получения дополнительной силы замаха.
В ходе маха вниз перенос веса с пальцев на пятку типично меняется на противоположный, соответствующим образом плавно перемещаясь с пальцев на пятку на левой ступне и, в меньшей степени, с пятки на пальцы на правой ступне. К концу маха вниз большая часть всего веса перенесена на пятку левой ступни. Распределение по времени и направление переноса веса либо общее перемещение силы вниз представляет важность в махе вниз. Оно не должно начинаться до маха вниз и, как правило, должно выполняться в целевом направлении или немного мимо к левым пальцам, постепенно проходя через них. В ходе первой стадии маха вниз большая часть поворота тела и бедер осуществляется вместе с существенной величиной смещения веса с пальцев на пятку, а также определенного общего смещения веса справа налево. Головка клюшки ускоряется в течение этой стадии, причем большая часть энергии предоставляется крупными мышцами ног и тела, и при этом клюшка почти полностью выходит на орбиту. Технически эта стадия выхода может длиться 60-70% общей продолжительности маха вниз. Вторая стадия маха вниз может быть задана, например, как оставшаяся часть маха вниз, до точки удара между головкой клюшки и мячом. В ходе этой второй стадии большая часть поворота тела и бедер уже выполнена. Головка клюшки продолжает ускоряться, причем большая часть энергии теперь предоставляется мышцами рук. Головка клюшки также продвигается к целевому направлению посредством смещения веса в этом направлении.
Устройство может обнаруживать несколько различных признаков в вертикальных силах вниз в ходе маха вниз, которые ассоциативно связаны с поворотным замедлением таза и туловища в ходе маха вниз, в том числе различные точки перегиба, ассоциативно связанные с началом ускорения, которые для удобства называются "точки силы перед ускорением", и набор различных точек перегиба, ассоциативно связанных с переходом к замедлению, которые для удобства называются "точками пиковой силы". Некоторые из этих сил также обусловлены вертикальным переносом тела. Поворотное замедление может типично демонстрироваться с силами перед ускорением и пиковыми силами преимущественно на левой ступне вследствие эффекта ужесточения ступни, тогда как вертикальный переход может типично демонстрироваться с этими силами, преимущественно уравновешенными между обеими ступнями.
Мах вниз переходит к точке, где клюшка ударяет по мячу, а затем к стадии завершения, когда клюшка проходит по дуге замаха. Время контактирования мяча и клюшки составляет порядка 0,00045 секунды. Хотя клюшка резко замедляется при ударе, продвижение в ином случае плавное. Большая часть веса остается на левой ступне после завершения.
В качестве важной части анализа вычислительное устройство планирует время различных обнаруживаемых главных событий, которые являются общими для всех стандартных замахов. Они упоминаются как "характерные события" и предоставляют общий каркас ссылки для анализа. Главные характерные события включают в себя начало обратного замаха; завершение обратного замаха; начало маха вниз; точку перед ускорением в махе вниз; точку пиковой силы в махе вниз и удар головки клюшки по мячу. Большинство этих главных характерных событий содержат составляющие события, которые могут немного отличаться по времени. Например, начало обратного замаха, завершение обратного замаха и начало маха вниз может слегка отличаться для аспекта обратного замаха движения головки клюшки, движения плеч и движения бедер. Точки силы перед ускорением и пиковой силы обычно немного отличаются для левой ступни, правой ступни и комбинации ступней. Во всех этих случаях разность может быть небольшой, но может быть очень значительной.
При создании структуры характерных событий вычислительному средству помогает знание типичных последовательностей характерных событий и вероятностей их возникновения во времени относительно друг друга для различных типов замаха в различных случаях. Каждая стадия замаха имеет типичное легко определяемое временное отношение, одна к другой, для различных типов ударов и случаев, которые могут быть заранее запрограммированы в вычислительном средстве или иным образом сделаны доступными ему. Эта информация может быть использована для того, чтобы помочь вычислительному средству в ограничении поиска характерного события в рамках временных пределов в замахе, относительно других характерных событий, и назначить вероятности обнаружению характерных событий в различные периоды времени в рамках этих временных пределов.
Вычислительному средству также может помочь знание замаха игрока. Эта информация, например, может быть записана в ходе предыдущих замахов и сохранена в журнале или памяти. Она может быть использована для того, чтобы уточнять вероятные моменты времени и вероятности моментов времени характерных событий относительно друг друга.
В последующих разделах описывается пример варианта осуществления устройства, в котором вычислительное средство определяет структуру характерных событий в замахе, измеренных посредством устройства. Чтобы помочь в пояснении, признаки событий излагаются в типичной хронологической последовательности, хотя маловероятно, что их фактическое вычисление будет выполняться в этом порядке.
Вычислительное средство первоначально оповещается о вероятном начале обратного замаха, когда прием достаточного разнесения перемещения веса ступни передается игроку как часть процесса определения позиции ступни.
Вычислительное средство оснащено дополнительным измерительным средством, находящимся в зоне подготовки к удару сзади от мяча, которое определяет начало обратного замаха головки клюшки посредством измерения того, когда головка клюшки покидает зону подготовки к удару. Это измерительное средство может содержать, например, электромагнитные лучи, которые испускаются и принимаются поперечно вдоль зоны подготовки к удару. Лучи могут формироваться посредством лазерных диодов и обнаруживаться посредством фотодиодов. Присутствие головки клюшки в этой зоне разрывает лучи, и ее выход из зоны обнаруживается посредством восстановления лучей.
Вычислительное средство также определяет начало общего обратного замаха посредством определения колебания с периода наименьшего изменения до периода длительного изменения в выбранном диапазоне переменных, в том числе позиций и модулей силы на ступни, пальцы и пятку для обеих ступней. Это колебание, которое обычно имеет обнаруживаемую линейно нарастающую характеристику продолжительности, может происходить до, одновременно или после обнаруженного начала обратного замаха, связанного с головкой клюшки. Разности между началом этих двух характерных событий важны для последующего анализа.
Вычислительное средство дополнительно определяет переход от обратного замаха к маху вниз. Переход может быть сложным, поскольку некоторые составляющие окончания обратного замаха могут перекрывать составляющие начала маха вниз. Вычислительное средство обнаруживает сложный переход посредством множества различных способов, результаты которых для удобства упоминаются как "индикаторы". Вследствие множества типов замаха и ошибок замаха, а также вследствие различных аспектов начала и завершения один индикатор точно не определяет время перехода. Некоторые из основных индикаторов перехода описаны в следующих разделах.
Одна из наиболее важных групп индикаторов перехода связана с точками во времени максимальной разности между силами на пальцы и пятки ступни или, если это осуществляется в течение периода времени, точкой во времени, где она отодвигается от этого периода максимальной разности. Следует отметить, что этот индикатор такой же, как равнодействующая сила на ступню, перемещающаяся к крайней продольной совмещенной со ступней позиции. Обычно силы в пальцах больше сил в пятке для этого индикатора. Имеется два индикатора в группе, один для левой ступни и один для правой ступни. Индикаторы могут присутствовать на обеих ступнях или только на одной из ступней.
Дополнительная важная группа индикаторов перехода связана с точками во времени обратного движения позиций поперечной совмещенной со ступней или продольной совмещенной со ступней, или поперечной, или продольной составляющей силы на левую ступню или правую ступню. Обратное движение поперечной совмещенной со ступней составляющей обычно возникает с направления вправо на направление влево. Обратное движение продольной совмещенной со ступней составляющей обычно является более слабым индикатором, чем обратное движение поперечной совмещенной со ступней составляющей, и чаще возникает, чем не возникает локально, а не в нечетком движении силы. Переход может быть указан посредством всех или любого из четырех индикаторов в этой группе.
Дополнительная важная группа индикаторов перехода связана с точками во времени изменения направления движения позицией поперечной или продольной составляющей комбинированной силы на обе ступни. В случае поперечного перемещения изменение обычно является полностью обратным, чаще всего с правого на левое, но иногда с левого на правое. В случае продольной составляющей изменение обычно является менее ярко выраженным и, как правило, содержит достаточно резкое изменение в общем направлении, но не изменение на обратное. Обратное движение продольной составляющей обычно является более слабым индикатором, чем обратное движение поперечной составляющей. Переход может быть указан посредством одного или обоих из двух индикаторов в этой группе.
Другим важным индикатором перехода является точка во времени обнаружения колебания с периода длительного изменения к относительно короткому периоду наименьшего изменения и обратно к периоду длительного изменения по выбранному диапазону переменных, в том числе позиций и модулей силы на ступни, пальцы и пятку для обеих ступней. Это отражает относительный покой перехода, когда система "тело и клюшка" переходит в состояние покоя между более энергетическими действиями обратного замаха и маха вниз.
Дополнительным индикатором перехода является точка во времени минимального значения силы на левую ступню или начала периода минимального значения силы на левую ступню.
Дополнительным индикатором перехода является точка во времени значительного изменения частоты изменения разности модулей сил между левой ступней и правой ступней.
Дополнительным индикатором перехода является точка во времени кумулятивного вертикального момента, возвращающегося к тому же нулевому значению, что имелось в начале обратного замаха. Этот индикатор работает хорошо только для игрока, наряду с его клюшкой, который становится моментально тихим, по меньшей мере, в вертикальном направлении в начале и конце обратного замаха. Достижение кумулятивного вертикального момента может быть легко определено посредством суммированного значения комбинированной силы на обе ступни, через короткие регулярные интервалы времени, относительно статического веса игрока, начинающейся сразу перед началом обратного замаха. Значения силы больше статического веса берутся как положительные, а значения меньше статического веса берутся как отрицательные. Сумма достигает нулевого значения, когда кумулятивный вертикальный момент возвращается к своему начальному нулевому значению.
Вычислительное средство использует некоторые или все индикаторы для того, чтобы получить наиболее точную оценку времени возникновения перехода. Взвешивание назначается результатам каждого индикатора, чтобы задать взвешенное среднее или взвешенное определение, при этом взвешивание частично зависит от предварительной оценки относительной важности индикаторов, а частично зависит от оценки силы результата от каждого индикатора.
Вычислительное средство также может оценивать относительные позиции составляющих перехода из результатов различных индикаторов, поскольку индикаторы не соответствуют в равной степени различным составляющим характерных событий перехода. Взаимосвязь индикаторов с этими составляющими может быть достаточно просто установлена опытным путем.
Вычислительное средство определяет точки во времени группы признаков событий, содержащей точки силы перед ускорением. Они возникают до быстрого возрастания силы вследствие движения таза и туловища в ходе маха вниз и типично содержат заметные изменения перегиба в значениях силы, которые изменяются либо с минимального значения, либо с периода относительно постоянного значения с начала маха вниз. Группа обычно содержит три характерных события, одно из которых соответствует комбинации обеих ступней, одно - левой ступне и одно - правой ступне. Тем не менее, в некоторых случаях только две точки перед ускорением могут возникать, одна - вследствие комбинации обеих ступней, а одна - вследствие либо левой ступни, либо правой ступни, чаще левой ступни.
Вычислительное средство определяет точки во времени группы признаков событий, содержащей точки пиковой силы. Они связаны с точками силы перед ускорением и также возникают до быстрого возрастания силы вследствие движения таза и туловища при замахе вниз. Они содержат максимальные пиковые значения силы. Аналогично точкам силы перед ускорением, группа обычно содержит три характерных события, одно из которых соответствует комбинации обеих ступней, одно - левой ступне и одно - правой ступне. Тем не менее, в некоторых случаях только две точки пиковой силы могут возникать, одна - вследствие комбинации обеих ступней, а одна - вследствие либо левой ступни, либо правой ступни, чаще левой ступни.
Вычислительное средство определяет время удара с помощью измерительного средства, которое может обнаруживать событие, связанное со временем удара головки клюшки по мячу. В одном варианте осуществления это измерительное средство находится в зоне подготовки к удару сзади от мяча и обнаруживает возврат головки клюшки в зону подготовки к удару, например, посредством обнаружения прерывания электромагнитного луча или набора лучей в этой зоне. Такое же измерительное средство может быть использовано для того, чтобы обнаруживать начало обратного замаха и время удара. Вычислительное средство может ассоциативно связывать время удара со временем сразу после разрыва луча. В альтернативном варианте осуществления микрофон может быть использован для того, чтобы обнаруживать звук удара.
Вычислительное средство анализирует замах посредством определения или оценки различных входных данных силы от датчиков в сравнении со структурой характерных событий, определенных позициями ступней и тела из информации, доступной для нее, что для простоты пояснения должно упоминаться как "доступные справочные данные" в рамках описания и прилагаемой формулы изобретения.
Доступные справочные данные могут быть поделены на различные категории, при этом основная категория содержит информацию, связанную с известными характеристиками замаха при игре в гольф, в том числе критерии, которые позволяют оценить или дифференцировать различные аспекты игры в сравнении с тем, что считается хорошей или плохой игрой, когда доступные данные подготовлены. Эти доступные справочные данные варьируются для различных ситуаций, в том числе различных типов замаха и различных уровней квалификации игрока. Типично, этот тип доступных справочных данных может быть предоставлен в вычислительное средство посредством заранее подготовленного программного обеспечения, которое загружено в него или иным способом доступно для вычислительного средства или заранее загружено в аппаратные средства вычислительного средства. Вычислительное средство может иметь доступ ко множеству элементов этого программного обеспечения, некоторые или все из которых содержат различные наборы доступных справочных данных.
Другая категория доступных справочных данных содержит информацию, которая доступна посредством вычислительного средства, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его предшествующей игре, содержащуюся в журнале информации по игроку. Например, эта информация может содержать подробные сведения о силе и слабости замаха игрока, так чтобы игра могла оцениваться в сравнении с силой или слабостью игрока, а не с общими стандартами гольфа.
Вычислительное средство может анализировать замах без ссылки на другое внешнее устройство или источники информации. Оно также может управляться совместно с устройствами или системами, которые предоставляют дополнительную информацию по замаху. Например, вычислительное средство и устройство согласно изобретению могут работать совместно с устройством, которое измеряет характеристики движения клюшки и мяча. Если такие устройства или внешние источники используются, доступные справочные данные могут быть надлежащим образом модифицированы так, чтобы содержать или предоставлять дополнительную информацию, доступную из внешних устройств или источников.
Анализ посредством вычислительного средства может принимать различные формы и выполнять различные функции. Например, он может включать в себя прямую оценку замаха при игре в гольф, передаваемую игроку, или он может быть использован в процессах интерактивных тренировок, где результаты анализа не сообщаются игроку, а вместо этого используются для того, чтобы предложить тренировочный элемент в рамках программного обеспечения вычислительного средства.
Примеры типичных процессов анализа, которые могут выполняться посредством вычислительного средства, приводятся в следующих разделах.
Вычислительное средство оценивает позиции ступней посредством сравнения конкретных характеристик ступней с релевантными доступными справочными данными. Конкретные характеристики типично включают в себя расстояние между позициями ступней; совмещение комбинированной поперечной оси ступней с целевым направлением; углы совмещения отдельных ступней и продольное и поперечное расстояние ступней от позиции мяча.
Вычислительное средство также определяет и оценивает характеристики, содержащие продолжительность между характерными событиями в замахе и относительные взаимоотношения продолжительности между характерными событиями в замахе посредством сравнения этих характеристик с доступными справочными данными. Характеристики включают в себя абсолютные значения продолжительности обратного замаха; маха вниз; всего замаха; части маха вниз от начала до точки силы перед ускорением; части маха вниз от точки силы перед ускорением до точки пиковой силы; части маха вниз от точки пиковой силы до удара. Характеристики также включают в себя отношения различных из этих абсолютных значений друг с другом.
Вычислительное средство дополнительно определяет и оценивает плавность и регулярность модулей и позиций силы для определенных элементов замаха. Они предоставляют показатель надлежащего естественного движения и равновесия, что важно для точности и силы замаха. Релевантные силы и элементы включают в себя: силы левой ступни и правой ступни, пальцев и пятки в ходе обратного замаха; силы левой ступни и правой ступни, пальцев и пятки в ходе маха вниз; силы левой ступни и правой ступни, поперечные и поперечные совмещенные со ступней силы ступни в ходе обратного замаха; силы левой ступни и правой ступни, поперечные и поперечные совмещенные со ступней силы ступни в ходе маха вниз; равнодействующие силы левой ступни и правой ступни в ходе обратного замаха; равнодействующие силы левой ступни и правой ступни в ходе маха вниз; комбинированные равнодействующие силы левой ступни и ступни в ходе обратного замаха; комбинированные равнодействующие силы левой и правой ступни в ходе маха вниз.
Вычислительное средство дополнительно определяет и оценивает степень переноса силы с пятки на пальцы на левой ступне и с пальцев на пятку на правой ступне при обратном замахе, а также степень переноса силы с пальцев на пятку на левой ступне и с пятки на пальцы на правой ступне при махе вниз и сравнивает значения с доступными справочными данными. Доступные справочные данные могут включать в себя диапазоны отношений значений силы пальцев/пятки в начале и конце обратного замаха и в начале и конце маха вниз.
Вычислительное средство также определяет и оценивает распределение по времени, направление и модуль общего переноса веса к целевому или предназначенному направлению посредством включения проверки направления и модуля комбинированной силы на обе ступни в релевантные моменты в ходе замаха и сравнения значений с доступными справочными данными. Релевантные моменты могут включать в себя момент времени, близкий к окончанию обратного замаха, момент времени, ассоциативно связанный с переходом между обратным замахом и махом вниз, а также моменты времени через интервалы в течение маха вниз.
Вычислительное средство дополнительно определяет и оценивает модули и распределение по времени точек силы перед ускорением и точек пиковой силы относительно друг друга и с определенными модулями и распределением по времени соответствующих сил в начале и конце маха вниз и сравнивает их с доступными справочными данными.
Вычислительное средство также определяет и оценивает продольное совмещенное со ступней и/или продольное равновесие игрока в ходе замаха для каждой ступни и для комбинации ступней посредством сравнения сил на пальцы и пятку на каждой ступне и относительной взаимосвязи между ними с релевантными критериями для каждой стадии замаха, а также сравнения этих значений с доступными справочными данными. Доступные справочные данные могут включать в себя диапазоны отношений значений силы на пальцы/пятку для отдельной ступни и для комбинации обеих ступней в ходе подготовки к удару, в начале и конце обратного замаха и в начале и конце маха вниз.
Вычислительное средство дополнительно определяет и оценивает поперечное равновесие через комбинацию обеих ступней посредством проверки поперечной позиции комбинированной равнодействующей силы относительно позиций ступней для каждой стадии замаха и сравнения этих значений с доступными справочными данными. Доступные справочные данные могут включать в себя диапазоны отношений значений поперечной левой/правой силы на левую и правую ступню в ходе подготовки к удару, в нескольких точках в ходе обратного замаха и маха вниз, в том числе в начале и конце.
Вычислительное средство также определяет поперечное совмещенное со ступней и/или поперечное качение левой или правой ступни игрока посредством проверки поперечных совмещенных со ступней и/или поперечных позиций равнодействующих сил на каждую ступню относительно этой ступни для каждой стадии замаха и сравнения этих значений с доступными справочными данными. Доступные справочные данные могут включать в себя диапазоны отношений значений поперечной совмещенной со ступней и/или поперечной левой/правой силы для левой и правой ступни в ходе подготовки к удару, в нескольких точках в ходе обратного замаха и маха вниз, в том числе в начале и конце, значений поперечной левой/правой силы для отдельной левой и правой ступни в ходе подготовки к удару, в начале и конце обратного замаха и в начале и конце маха вниз.
Вычислительное средство дополнительно определяет или оценивает продолжительность между окончанием различных составляющих обратного замаха и относительные задержки при полном переходе от обратного замаха к маху вниз посредством статистического анализа продолжительности и модуля наименьшего изменения для выбранного диапазона переменных, которые, как известно, типично снижают свою частоту изменения во время полного перехода, в том числе позиций и модулей силы на ступни, пальцы и пятку для обеих ступней, а также сравнения этих значений с доступными справочными данными. Доступные справочные данные могут включать в себя диапазоны абсолютных значений и значений отношения.
Вычислительное средство дополнительно определяет, поднимает ли игрок ступню с неподвижной поверхности, посредством проверки того, снижается ли модуль равнодействующей силы до нулевого или практически нулевого значения, и сравнения этих значений с доступными справочными данными.
Вычислительное средство также определяет то, если игрок плавно перемещает ступню в другую позицию на неподвижной поверхности, посредством проверки того, находится ли позиция равнодействующей силы вне пределов границ равнодействующих, установленных для позиции ступни, и сравнения этих значений с доступными справочными данными.
Вычислительное средство также определяет то, если игрок плавно перемещает ступню в другую позицию на неподвижной поверхности, посредством проверки того, снижается ли модуль составляющей силы пятки или составляющей силы пальцев до нулевого или практически нулевого значения, и сравнения этих значений с доступными справочными данными.
Вычислительное средство дополнительно определяет и оценивает относительную согласованность различных замахов посредством определения разностей в их релевантных характеристиках и сравнения значений этих разностей с доступными справочными данными. Релевантные характеристики содержат любые измеренные или определенные характеристики, которые релевантны требуемым показателям согласованности и включают в себя любое значение или характеристику, которая сравнивается с доступными справочными данными. Разности в релевантных характеристиках могут быть выражены как безразмерные объектные сущности, такие как соотношения.
Вычислительное средство скомпоновано так, что оно может выборочно назначать меньшую важность, в соответствии с доступными справочными данными, чтобы форсировать измерения для очень слабо нагруженной ступни в сравнении с измерениями для относительно сильно нагруженной ступни при определении или оценке вероятного времени характерных событий или игры игрока на основе изменений для сил на отдельные ступни, на пальцы, пятку или равнодействующих сил.
Сигналы, передаваемые на вычислительное средство, преобразуются в цифровой формат и обрабатываются далее в цифровом или числовом формате, который, как правило, используется в вычислительном средстве. Известные вычислительные и статистические способы могут быть использованы для того, чтобы осуществлять вычисления и анализ. Обнаружения изменений, максимумов или минимумов может включать в себя сравнение последовательных значений переменной, когда переменная дискретизируется через регулярные интервалы времени. Определение изменений на противоположное может включать в себя обнаружение изменения с положительного на отрицательное или с отрицательного на положительное последовательных значений переменных, когда переменные дискретизируются через регулярные интервалы времени. Определение относительных разностей между переменными может включать в себя вычисление разности, когда переменные одновременно дискретизируются через регулярные интервалы времени. Плавность или регулярность может быть определена посредством относительного максимального модуля разностей в изменениях и частоты возникновения этих изменений, в сравнении с доступными справочными данными. Плавность или регулярность также может быть обнаружена посредством пиков в ускорении переменной. Доступные справочные данные могут включать в себя диапазоны значений конкретных характеристик, диапазоны абсолютных значений и значений соотношения, соответствующие обстоятельствам, определенным в связи с поэтапным выполнением. Вычислительное средство может сопоставлять игру и игрока с релевантным стандартом и ассоциативно связывать соответствующее поэтапное выполнение.
Следует понимать, что изобретение не ограничено конкретными подробностями, описанными в данном документе, которые приведены только в качестве примера, и различные модификации и изменения допустимы без отступления от изобретения, заданного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ АНАЛИЗА СВИНГА В ГОЛЬФЕ | 2008 |
|
RU2497565C2 |
| ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК ДВИЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2382665C2 |
| КЛЮШКА ДЛЯ ГОЛЬФА С ФУНКЦИЕЙ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2004 |
|
RU2315642C2 |
| КОРОТКАЯ КЛЮШКА ДЛЯ ГОЛЬФА | 1994 |
|
RU2089253C1 |
| Устройство для игры в продвинутый гольф | 2022 |
|
RU2799667C1 |
| НАБОР ГОЛОВОК КЛЮШКИ ДЛЯ ГОЛЬФА, ГОЛОВКА КЛЮШКИ ДЛЯ ГОЛЬФА (ВАРИАНТЫ) И СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОВОК КЛЮШКИ ДЛЯ ГОЛЬФА | 1994 |
|
RU2106172C1 |
| СПОСОБ УЛУЧШЕНИЯ РАБОТОСПОСОБНОСТИ ЧЕЛОВЕКА | 2014 |
|
RU2601102C2 |
| СПОСОБ АДАПТАЦИИ ИГРЫ ГОЛЬФ К УСЛОВИЯМ ОГРАНИЧЕННОГО ПРОСТРАНСТВА | 2006 |
|
RU2334537C1 |
| ТРЕНАЖЕР ДЛЯ ГОЛЬФА | 2011 |
|
RU2477164C1 |
| ГОЛОВКА КЛЮШКИ ДЛЯ ИГРЫ В ГОЛЬФ | 1995 |
|
RU2106888C1 |
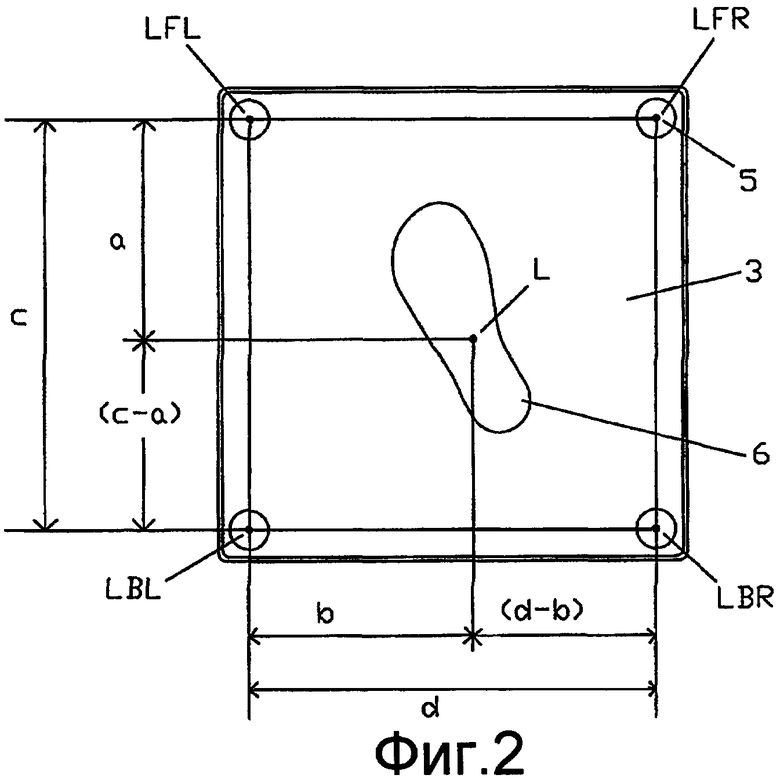
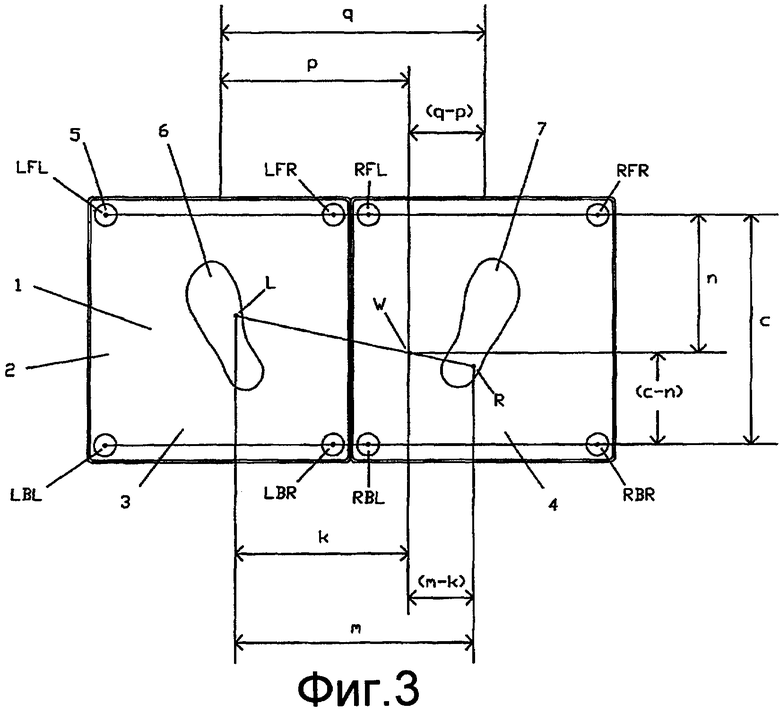
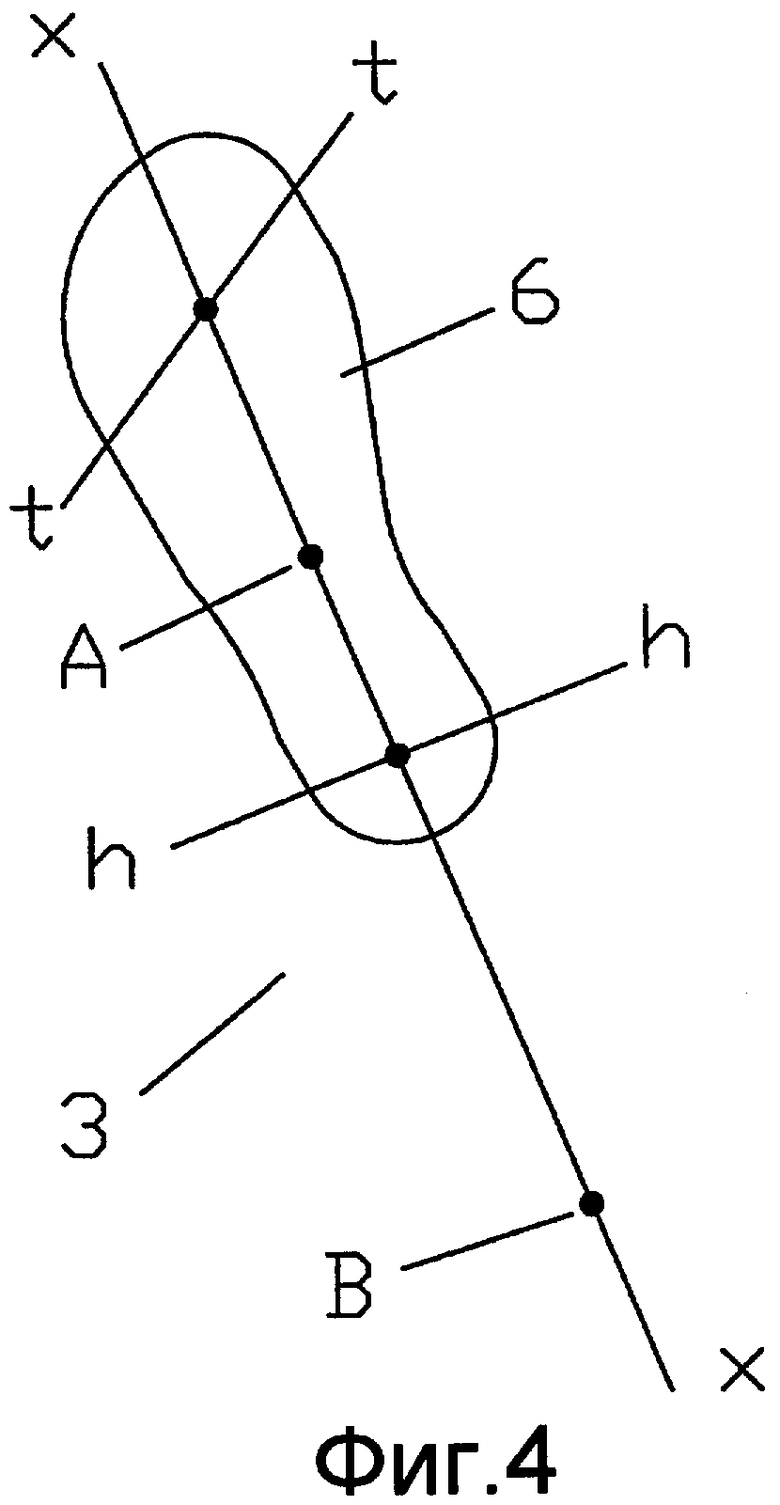
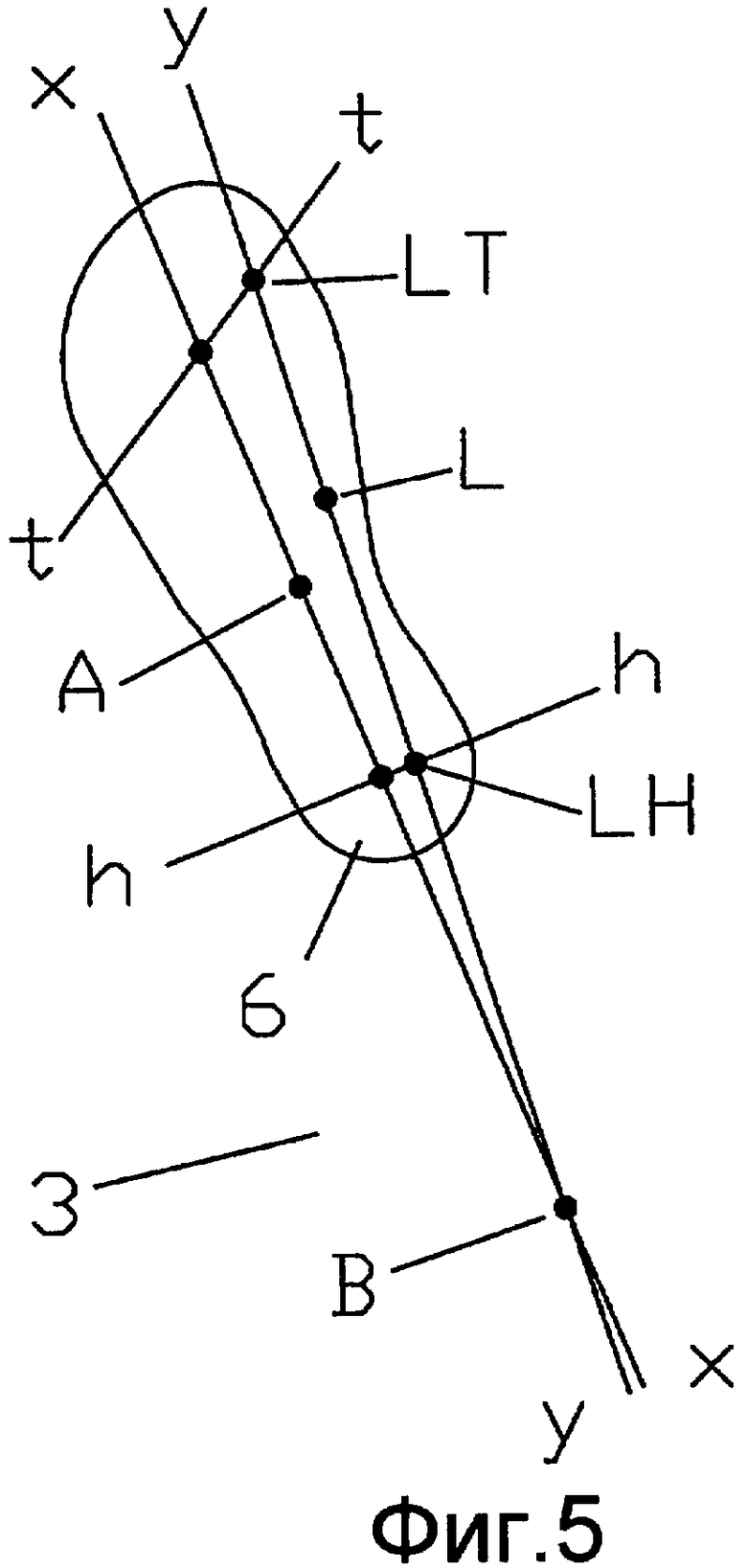
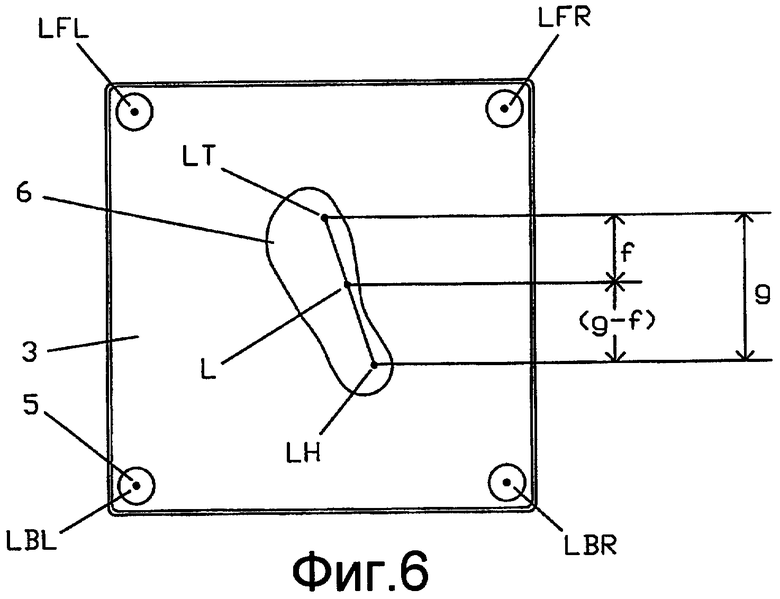
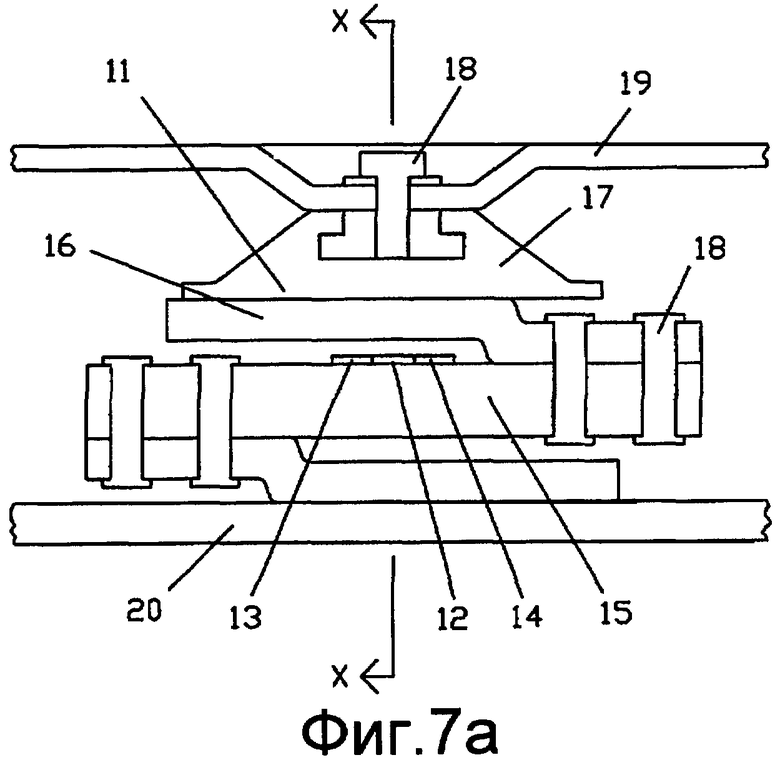
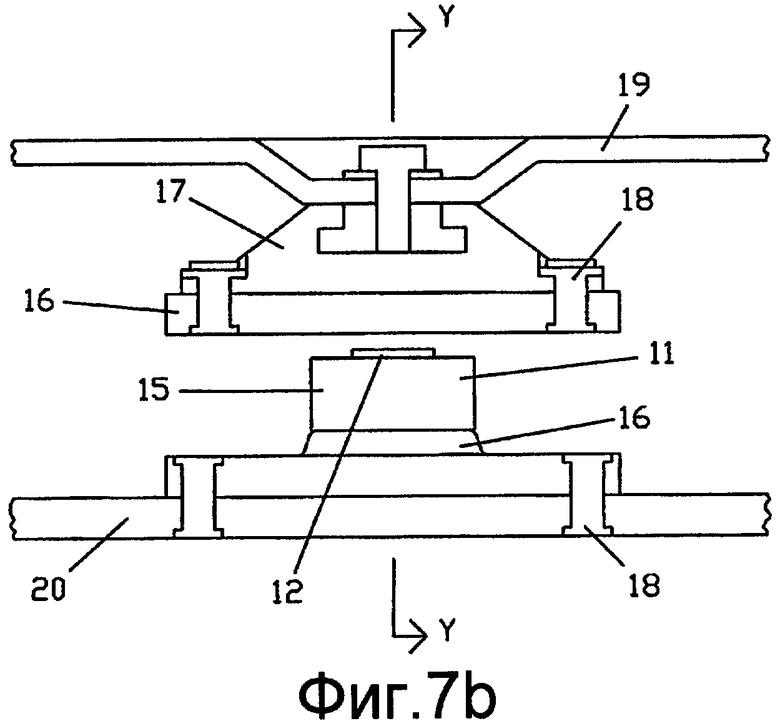
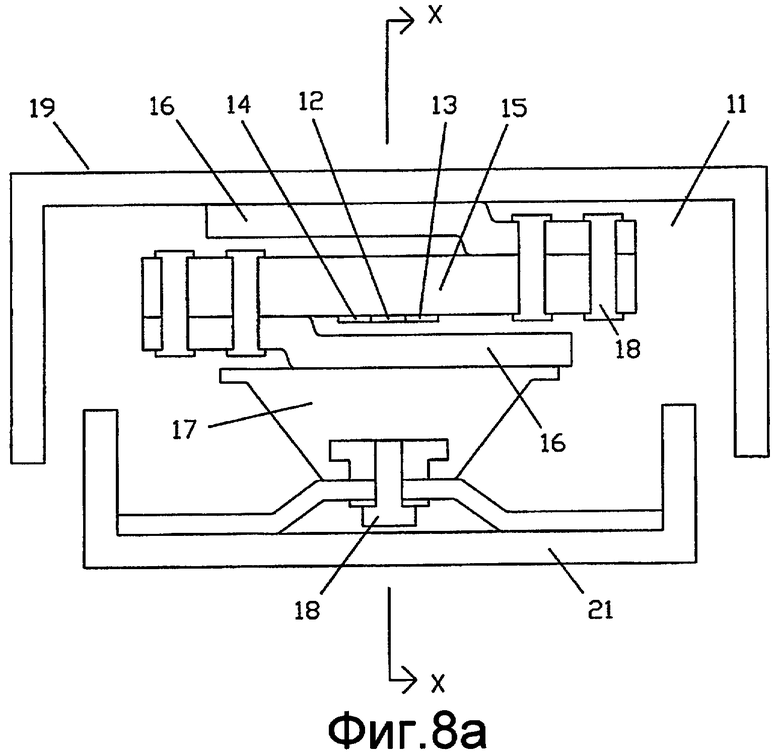
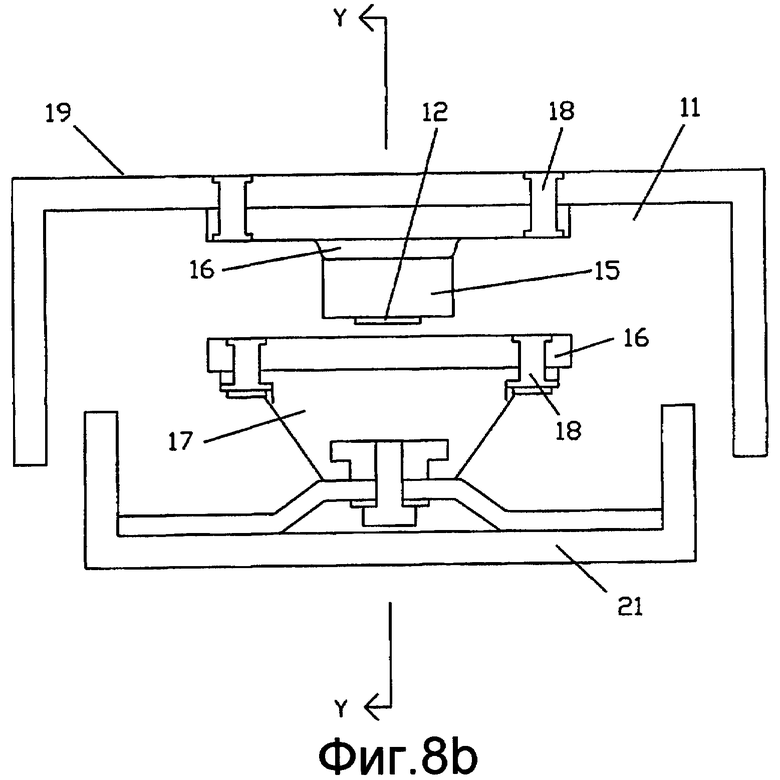
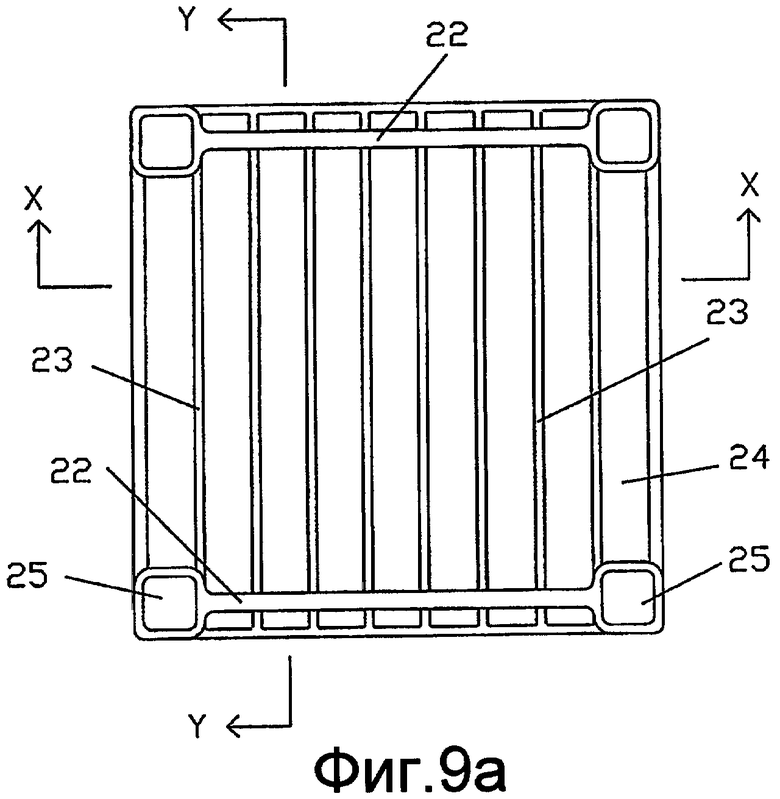
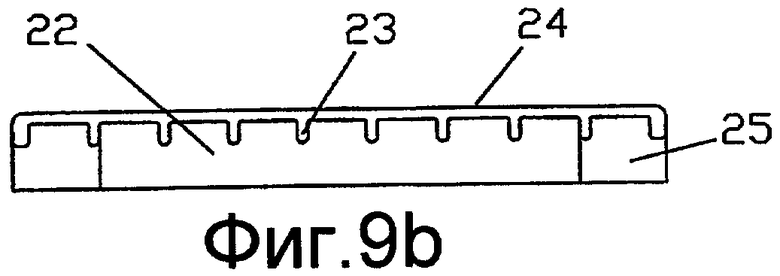
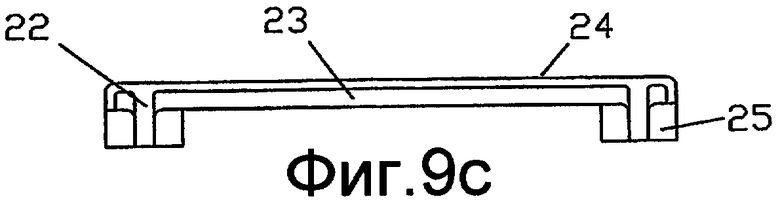

Изобретение преодолевает эти различные недостатки предшествующего уровня и предоставляет способ и устройство, которое надлежащим образом измеряет и анализирует действующие на ступни силы в ходе замаха при игре в гольф таким образом, что результаты сообщаются обычному игроку в гольф в подходящем и пригодном формате. Устройство (1) содержит неподвижную поверхность (2) для игрока; средство (27) связи и множество датчиков (11), функционирующих так, чтобы измерять силу. Неподвижная поверхность (2) содержит две отдельных платформы (3, 4) для ступней игрока. Каждая платформа (3, 4) для ступней содержит опорную конструкцию или поддерживающие элементы, при этом вертикальные силы распределяются на множество дискретных позиций (5). Датчики (11) размещаются в дискретных позициях (5), на которые распределяются вертикальные силы. Датчики (11) функционируют так, чтобы измерять вертикальные силы. Устройство также содержит вычислительное средство (26), которое функционирует так, чтобы анализировать замах, и включает в себя средство, чтобы принимать и по отдельности обрабатывать сигналы от отдельных или групп датчиков (11); средство, чтобы определять относительные модули и позиции равнодействующих сил посредством разрешения равновесия сил, в том числе отдельных сил, измеряемых посредством датчиков (11), в отношении дискретных позиций датчиков (11); и средство, чтобы анализировать и оценивать числовые данные, связанные с измеренными позициями и модулями сил. 4 н. и 59 з.п. ф-лы, 10 ил.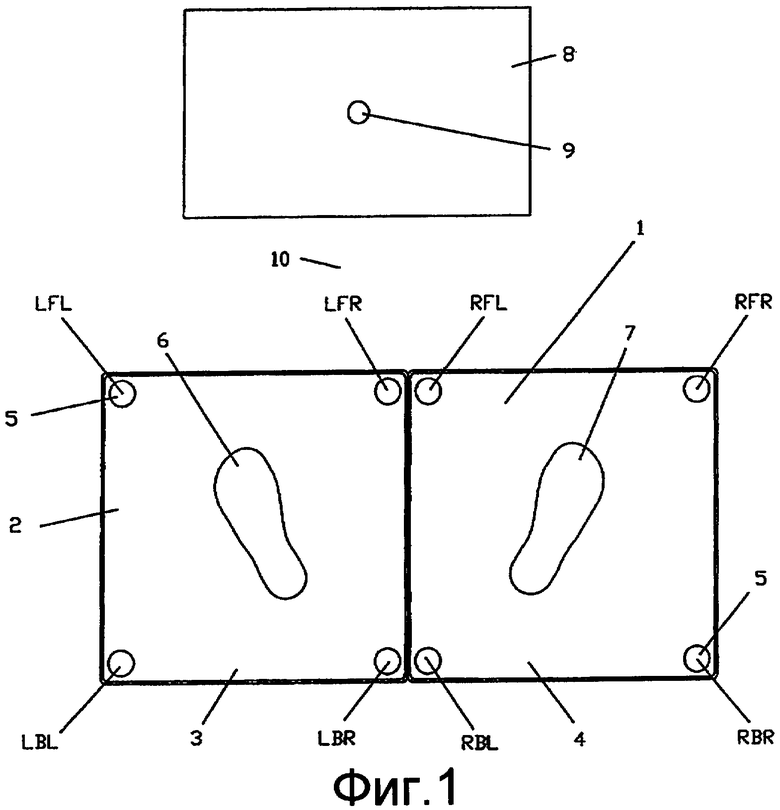
1. Устройство для измерения и анализа связанных со ступнями игрока сил в ходе замаха при игре в гольф или замаха в других видах спорта, который аналогичен замаху при игре в гольф, содержащее поверхность, на которой стоит игрок; средство связи; и множество сенсорных средств, функционирующих с возможностью измерять силу; причем (А) поверхность, на которой стоят, содержит две отдельные платформы для ступней, предназначенные для ступней игрока, каждая платформа для ступни содержит опорную конструкцию, которая включает в себя поверхность или активную поверхность, при этом вертикальные силы на опорную конструкцию распределяются на множество дискретных позиций; (В) сенсорные средства размещаются в дискретных позициях, на которые распределяются вертикальные силы; сенсорные средства функционируют с возможностью измерять вертикальные силы; (С) устройство также содержит вычислительное средство, которое функционирует с возможностью анализировать замах и включает в себя: средство, которое функционирует с возможностью принимать и по отдельности обрабатывать сигналы от отдельных или групп сенсорных средств; средство, которое функционирует с возможностью определять относительные амплитуды и позиции равнодействующих сил посредством разрешения равновесия сил, в том числе отдельных сил, измеряемых посредством сенсорных средств в связи с дискретными позициями сенсорных средств; средство, которое функционирует с возможностью анализировать и оценивать числовые данные, связанные с измеренными позициями и амплитудами сил; и (D) вычислительное средство также функционирует с возможностью анализировать замах посредством определения или оценки сил от сенсорных средств в отношении структуры характерных событий; и/или определенных позиций ступней; и объемом информации, доступным для вычислительного средства, содержащей доступные справочные данные; где: определение или оценка, связанная со структурой характерных событий, содержит отображение времени различных обнаруживаемых главных событий, которые являются общими для всех обычных замахов; и определение или оценка, связанная с определенными позициями ступней, содержит статистический анализ группы равнодействующих сил, измеренных посредством сенсорных средств, когда игрок смещает вес со ступни в этой позиции; и доступные справочные данные включают в себя: информацию, связанную с известным выполнением замаха, в том числе критерии, которые дают возможность оценить или дифференцировать различные аспекты выполнения в сравнении с тем, что считается хорошим или плохим выполнением, когда доступные справочные данные подготовлены; и/или информацию, к которой получают доступ посредством вычислительного средства от средства ведения журналов, функционирующего с возможностью регистрировать информацию, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его или ее предшествующем выполнении; и/или информацию, которая доступна посредством вычислительного средства от взаимодействующего средства для взаимодействия с другими устройствами или системами, при этом взаимодействующее средство функционирует с возможностью принимать дополнительную информацию о замахе от других устройств или систем; и (Е) вычислительное средство и средство связи функционируют с возможностью анализировать замах и осуществлять связь с игроком без помощи стороннего специалиста, технического специалиста или эксперта посредством вычислительного средства, запрограммированного определять, оценивать или производить оценку выбора из следующего: а) моменты времени, когда происходят характерные события, b) характеристики, содержащие продолжительности между характерными событиями и относительные отношения длительностей между характерными событиями, посредством сравнения этих характеристик с доступными справочными данными, доступными вычислительному средству, с) плавность или регулярность изменений в позиции или амплитуде указанных сил в указанные периоды замаха, d) распределение по времени и направление объединенной силы в обеих ступнях - во время замаха и сравнение этих значений с доступными справочными данными, е) распределение по времени и величина объединенной силы в обеих ступнях во время замаха и сравнение этих значений с доступными справочными данными, f) боковой баланс через объединение обеих ступней посредством проверки боковой позиции объединенной результирующей силы относительно позиции ступней, по каждой стадии замаха, и сравнение этих значений с доступными справочными данными, доступными вычислительному средству, и g) согласованность относительно различных замахов посредством определения разностей в относительных характеристиках и сравнения значений этих разностей.
2. Устройство по п.1, в котором вычислительное средство содержит программное обеспечение с тренировочными элементами; средство связи функционирует с возможностью осуществлять связь с игроком, а вычислительное средство и средство связи функционируют с возможностью быть использованными в процессах интерактивных тренировок, где результаты анализа используются для того, чтобы подсказать тренировочный элемент в рамках программного обеспечения вычислительного средства.
3. Устройство по п.1, в котором средство для того, чтобы анализировать замах посредством определения или оценки сил от сенсорных средств, для сравнения со структурой характерных событий.
4. Устройство по п.1, в котором средство для того, чтобы анализировать замах посредством определения или оценки сил от сенсорных средств, для сравнения со структурой определенных позиций ступней.
5. Устройство по п.1, в котором доступные справочные данные включают в себя информацию, связанную с известным выполнением замаха, в том числе критерии, которые позволяют оценить или дифференцировать различные аспекты игры в сравнении с тем, что считается хорошим или плохим выполнением, когда доступные справочные данные подготовлены.
6. Устройство по п.1, при этом устройство включает в себя средство ведения журналов, а доступные справочные данные включают в себя информацию, к которой получают доступ посредством вычислительного средства от средства ведения журналов, функционирующего с возможностью регистрировать информацию, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его предшествующем выполнении.
7. Устройство по п.1, при этом устройство включает в себя взаимодействующее средство, которое функционирует с возможностью принимать дополнительную информацию о замахе от других устройств или систем, а доступные справочные данные включают в себя информацию, которая доступна посредством вычислительного средства от взаимодействующего средства.
8. Устройство по п.1, в котором сенсорные средства содержат тензометрические датчики;
опционально, каждый тензометрический датчик содержит два тензометрических элемента и элемент растяжения, имеющий одну зону поверхности, которая растягивается, и другую зону поверхности, которая сжимается, когда датчик подвергается действию нагрузки, причем по одному из тензометрических элементов соединены с каждой из этих зон, так что один растягивается и увеличивает сопротивление, а другой сжимается и уменьшает сопротивление, когда нагрузка прикладывается к датчику; опционально, элемент растяжения содержит стержень, который соединен одним концом с опорным элементом, который одним концом размещен над позицией тензометрических элементов, и соединен другим концом с опорным элементом, который одним концом размещен под позицией тензометрических элементов, посредством чего нагрузка прикладывается к датчику через опорные элементы; опционально, каждый тензометрический датчик содержит гибкий элемент, посредством чего нагрузка прикладывается к одному из опорных элементов через гибкий элемент; опционально, тензометрические элементы электрически соединены в конфигурации моста, например конфигурации сбалансированного моста Уитстона.
9. Устройство по п.1, в котором платформы для ступни имеют прямоугольную или квадратную форму и размещены рядом сбоку друг от друга; опционально, сенсорные средства размещены под платформами для ступней с одним сенсорным средством рядом с зоной каждого угла каждой платформы для ступни; и опционально, сенсорные средства размещаются горизонтально симметрично, причем центры всех сенсорных средств к передней части платформ размещаются поперечно коллинеарно, центры всех сенсорных средств к задней части платформ размещаются поперечно коллинеарно, и центр каждого сенсорных средств к передней части размещается продольно коллинеарно с центром соответствующего сенсорного средства к задней части.
10. Устройство по п.1, в котором каждая платформа для ступни содержит два набора соединенных жестких элементов, которые поддерживают поверхность или эффективную поверхность платформы для ступни и расположены практически в горизонтальной плоскости; первый набор соединенных жестких элементов содержит два параллельных жестких элемента, а второй набор содержит множество взаимно параллельных жестких элементов, которые размещаются под углом, таким как подходящий угол, к первому набору, жесткие элементы второго набора охватывают и поддерживаются жесткими элементами первого набора, которые поддерживаются сенсорными средствами, с тем, чтобы вертикальная сила, применяемая к элементам второго набора, переносилась на элементы первого набора и затем на сенсорные средства; и два набора жестких элементов взаимодействуют так, чтобы платформа для ступни была относительно жесткой в направлениях, параллельных жестким элементам, и относительно гибкой в других направлениях; опционально, платформа для ступни содержит полимерную формовку, а жесткие элементы содержат неразъемные ребра в формовке; и опционально, платформа для ступни поддерживается на основании, которое имеет меньшую гибкость, чем платформа для ступни в направлениях, где платформа для ступни является относительно более гибкой.
11. Устройство по п.1, в котором платформы для ступней являются в достаточной степени большими, чем предполагаемая ступня игрока, чтобы обеспечить выбор позиций ступни; и опционально, длина и ширина каждой платформы для ступни составляет от 1,5 до 2,5 от предполагаемой длины ступни игрока.
12. Устройство по п.11, в котором вычислительное средство функционирует с возможностью определять позицию ступни, или характеристики позиции ступни, посредством статистического анализа группы равнодействующих сил, измеренных посредством сенсорных средств, когда игрок смещает вес с помощью ступни в этой позиции.
13. Устройство по п.12, в котором вычислительное средство функционирует с возможностью инструктировать или требовать от игрока смещать вес в достаточной мере, чтобы предоставлять группу равнодействующих сил с заранее определенным разнесением "спереди-назад" или "бок-бок".
14. Устройство по п.12 или 13, в котором группа равнодействующих сил предоставляется при раскачивании и/или подготовке к удару, предшествующей замаху.
15. Устройство по п.14, в котором заранее заданное требуемое разнесение "спереди-назад" составляет от 0,45 до 0,55 от длины ступни или предполагаемой длины ступни; и
опционально, заранее заданное требуемое разнесение "бок-бок" составляет от 0,10 до 0,18 от длины ступни или предполагаемой длины ступни.
16. Устройство по любому из п.15, в котором позиция ступни представляется посредством не более двух объектов, которые могут быть выражены в простых математических терминах.
17. Устройство по п.16, в котором позиция ступни представляется, или частично представляется, посредством линии наилучшего соответствия, статистически извлеченной из группы равнодействующих сил и примерно соответствующей центральной длинной оси ступни; и опционально, статистическое извлечение линии наилучшего соответствия основано на линии наилучшего соответствия относительно границы группы равнодействующих сил.
18. Устройство по п.17, в котором позиция ступни представляется, или частично представляется, посредством статистического центра, статистически извлеченного из группы равнодействующих сил и примерно соответствующего позиции равнодействующей силы на ступню, когда равнодействующая сила уравновешена по центру относительно ступни; и опционально, статистический центр определяется как точка, лежащая на линии наилучшего соответствия, размещенной посередине между самыми передними и самыми задними значениями в группе равнодействующих сил.
19. Устройство по п.18, в котором длина ступни оценивается со ссылкой на статический вес игрока и клюшки, определенный устройством.
20. Устройство по п.19, в котором вычислительное средство функционирует с возможностью оценивать равнодействующую силу ступни посредством сравнения ее позиции, включающей в себя ее продольную или поперечную позицию, с определенными характеристиками позиции ступни.
21. Устройство по п.19, в котором вычислительное средство функционирует с возможностью оценивать позицию равнодействующей силы ступни относительно двух ортогональных осей, одна из которых является линией соответствующей длинной центральной оси ступни, а вторая является линией, ортогональной длинной центральной оси, проходящей через точку, которая соответствует уравновешенной по центру позиции ступни; и опционально, линия и точка являются линией наилучшего соответствия и статистическим центром, определенным из группы выборок равнодействующих сил ступни.
22. Устройство по п.21, в котором вычислительное средство функционирует с возможностью определять составляющие равнодействующей силы ступни посредством разрешения равновесия равнодействующей силы ступни в отношении определенной позиции ступни или характеристик позиции ступни.
23. Устройство по п.22, в котором вычислительное средство функционирует с возможностью определять составляющие равнодействующей силы ступни, для данной позиции ступни, в составляющие силы, разрешенные как коллинеарные силы с равнодействующей силой ступни и с общей позицией фокуса сзади ступни; опционально, вычислительное средство функционирует с возможностью определять составляющие как составляющие пальцев и пятки, или передние и задние составляющие, с помощью их позиций, коллинеарных с равнодействующей силой с точкой фокуса сзади линии наилучшего соответствия, причем позиция составляющей пальцев также лежит на линии пальцев, которая является представляемым и упрощенным геометрическим местом самых передних позиций равнодействующей силы, а позиция составляющей пятки также лежит на линии пятки, которая является представляемым и упрощенным геометрическим местом самых задних позиций равнодействующей силы; и опционально, линия пятки - это прямая линия, ортогональная к линии наилучшего соответствия, размещенной сзади от статистического центра в 0,30 до 0,40 предполагаемой длины ступни, линия пальцев - это прямая линия под углом от 45° до 75° к линии наилучшего соответствия, размещенной впереди от статистического центра в 0,30 до 0,40 предполагаемой длины ступни, а точка фокуса лежит на линии наилучшего соответствия на расстоянии до задней части статистического центра в 0,65 до 1,00 предполагаемой длины ступни.
24. Устройство по п.1, в котором вычислительное средство функционирует с возможностью определять позицию комбинированной равнодействующей силы от обеих ступней игрока посредством разрешения равновесия сил или характеристик сил, определенных для отдельных ступней относительно дискретных заданных позиций сенсорных средств.
25. Устройство по п.1, при этом устройство функционирует с возможностью измерять и анализировать силы ступней при замахе в ходе игры в гольф.
26. Устройство по п.25, в котором вычислительное средство функционирует с возможностью определять или оценивать моменты времени возникновения характерных событий при замахе в ходе игры в гольф и функционирует с возможностью использовать их при анализе замаха в ходе игры в гольф.
27. Устройство по п.26, в котором вычислительное средство функционирует с возможностью идентифицировать конкретные периоды замаха в ходе игры в гольф, которые могут быть выгодно проанализированы более подробно по времени, чем другие периоды, и функционирует с возможностью анализировать их более подробно по времени.
28. Устройство по п.26 или 27, в котором вычислительное средство имеет информацию, доступную ему, по типичным или вероятным последовательностям и моментам времени возникновения характерных событий при замахе в ходе игры в гольф, подходящих к различным обстоятельствам, и функционирует с возможностью помогать в определении или оценке моментов времени возникновения характерных событий при замахе в ходе игры в гольф посредством ассоциативного связывания характерных событий с выборочной информацией; и опционально, определение или оценка включает в себя ограничение поиска характерного события в рамках временных пределов в замахе, относительно других характерных событий, и назначение вероятностей обнаружению характерных событий в различные периоды времени в рамках временных пределов в замахе.
29. Устройство по п.26 или 27, в котором вычислительное средство имеет зарегистрированную информацию, доступную ему, о подробностях возникновения характерных событий при замахах в ходе игры в гольф, ранее выполненных игроком, и функционирует с возможностью помогать в определении или оценке моментов времени возникновения характерных событий при замахе в ходе игры в гольф посредством ассоциативного связывания характерных событий с зарегистрированной информацией; и опционально, определение или оценка включает в себя ограничение поиска характерного события в рамках временных пределов в замахе, относительно других характерных событий, и назначение вероятностей обнаружению характерных событий в различные периоды времени в рамках временных пределов в замахе.
30. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать начало обратного замаха клюшки посредством обмена данными с устройством, которое функционирует с возможностью определять или оценивать время, когда головка клюшки покидает зону подготовки к удару; и опционально, включающее в себя обнаружение восстановления электромагнитного луча, который разорван головкой клюшки, когда она находится в зоне подготовки к удару, причем обнаружение или оценка включает в себя ассоциативное связывание начала обратного замаха клюшки со временем сразу перед восстановлением луча.
31. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать начало обратного замаха посредством нахождения в рамках короткого периода после окончания периодов раскачивания или подготовки к удару, колебание с периода наименьшего изменения до периода длительного изменения в выбранном диапазоне переменных, в том числе позиций и амплитуд силы ступни, пальцев и пятки для обеих ступней; и опционально, обнаружение изменения включает в себя сравнение последовательных значений переменной, когда переменная дискретизируется через регулярные интервалы времени.
32. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время полного перехода от обратного замаха к маху вниз посредством определения одновременной максимальной относительной разности между силами пальцев и пятки, или передними и задними силами, для одной или обеих ступней; и опционально, определение относительных разностей между переменными включает в себя вычисление разности, когда переменные одновременно дискретизируются через регулярные интервалы времени.
33. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время полного перехода от обратного замаха к маху вниз посредством определения времени обратного продольного или поперечного движения либо продольного совмещенного со ступней или поперечного совмещенного со ступней движения, сил одной или обеих ступней, причем определение обратного движения включает в себя обнаружение изменения с положительного на отрицательное или с отрицательного на положительное последовательных значений переменных продольного или поперечного движения либо продольного совмещенного со ступней или поперечного совмещенного со ступней движения, когда переменные дискретизируются через регулярные интервалы времени; и опционально, определение изменения движения на противоположное включает в себя обнаружение изменения с положительного на отрицательное или с отрицательного на положительное последовательных значений продольных или поперечных переменных, когда переменные дискретизируются через регулярные интервалы времени.
34. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством определения изменения движения позиций поперечной составляющей комбинированной силы на обе ступни или изменения направления движения поперечной или продольной составляющей комбинированной силы на обе ступни; опционально, определение изменения движения на противоположное включает в себя обнаружение изменения с положительного на отрицательное или с отрицательного на положительное последовательных значений поперечных переменных, когда переменные дискретизируются через регулярные интервалы времени; опционально, в котором определение изменения направления включает в себя обнаружение склоняемого изменения разностей между последовательными значениями продольных или поперечных переменных, когда переменные дискретизируются через регулярные интервалы времени.
35. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством обнаружения колебания с периода длительного изменения к относительно короткому периоду наименьшего изменения и обратно к периоду длительного изменения, по выбранному диапазону переменных, в том числе позиций и модулей силы ступни, пальцев и пятки для обеих ступней; и опционально, обнаружение изменения включает в себя сравнение последовательных значений переменной, когда переменная дискретизируется через регулярные интервалы времени.
36. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством определения времени минимального значения силы на переднюю ступню или начала периода минимального значения силы на переднюю ступню; и опционально, определение минимального значения включает в себя обнаружение наименьшего значения, когда переменная дискретизируется через регулярные интервалы времени.
37. Устройство по п.26 или 21, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством определения времени значительного изменения в частоте изменений разностей амплитуд силы между левой ступней и правой ступней; и опционально, в котором определение значительного изменения включает в себя обнаружение склоняемого изменения скорости изменения разностей между последовательными значениями силы между левой ступней и правой ступней, когда переменные дискретизируются через регулярные интервалы времени.
38. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством определения времени, когда зарегистрированный кумулятивный вертикальный момент сохраняет нулевое значение; и опционально, обнаружение нулевого значения зарегистрированного кумулятивного вертикального момента включает в себя обнаружение нулевого значения в зарегистрированной кумулятивной общей силы относительно статического веса игрока и клюшки при подготовке к удару через короткие регулярные интервалы времени с начала замаха.
39. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать время перехода от обратного замаха к маху вниз посредством доступа или усреднения результатов любой или всех доступных индикаторов этого перехода; и опционально, оценка или усреднение включает в себя назначение взвешивания результатам каждого индикатора и взятие взвешенного среднего результатов, при этом взвешивание частично зависит от предварительной оценки относительной важности индикаторов, а частично зависит от оценки силы результата от каждого индикатора.
40. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать относительные составляющие перехода из результатов различных индикаторов; и опционально, определению или оценке могут помогать доступные справочные данные, доступные вычислительному средству.
41. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать моменты времени точек перед всплеском силы при махе вниз посредством обнаружения изменений амплитуды сил в комбинации обеих ступней, или в левой ступне, или в правой ступне, которые изменяются либо с минимального значения, либо с периода относительно постоянного значения с начала маха вниз; и опционально, определение или оценка включает в себя обнаружение того, когда возникает минимальное значение амплитуды силы, посредством сравнения последовательных значений, когда дискретизируются через регулярные интервалы времени.
42. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать моменты времени точек пиковой силы при махе вниз посредством обнаружения времени, когда амплитуды сил для комбинации из обеих ступней, либо на левую ступню или на правую ступню достигают максимального значения; и опционально, определение или оценка включает в себя обнаружение того, когда возникает максимальное значение амплитуды силы, посредством сравнения последовательных значений, когда дискретизируются через регулярные интервалы времени.
43. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать момент времени удара клюшки и мяча посредством обмена данными с устройством, которое функционирует с возможностью определять или оценивать то, когда головка клюшки возвращается в зону подготовки к удару, в том числе обнаружения прерывания электромагнитного луча головкой клюшки в зоне подготовки к удару, либо посредством обмена данными с микрофоном, который функционирует с возможностью обнаруживать звук удара; и опционально, определение или оценка включает в себя ассоциативное связывание времени удара со временем сразу после разрыва луча.
44. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью оценивать позиции ступней посредством сравнения обнаруженных конкретных характеристик позиций ступней, с доступными справочными данными, доступными вычислительному средству, причем конкретные характеристики включают в себя расстояние между позициями ступней; совмещение комбинированной поперечной оси ступней с целевым направлением; углы совмещения отдельных ступней; и продольное и поперечное расстояние ступней от позиции мяча; и опционально, доступные справочные данные могут быть заранее запрограммированы и включают в себя диапазоны значений конкретных характеристик, соответствующих обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
45. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать характеристики, содержащие продолжительность между характерными событиями в замахе и относительные взаимоотношения продолжительности между характерными событиями в замахе, посредством сравнения этих характеристик с доступными справочными данными, доступными для вычислительного средства, причем характеристики включают в себя абсолютные значения продолжительности обратного замаха; маха вниз; всего замаха; части маха вниз от начала до точки перед ускорением; части маха вниз от точки перед всплеском до пиковой точки; части маха вниз от пиковой точки до удара; и/или отношения этих абсолютных значений друг к другу; и опционально, доступные справочные данные могут быть заранее запрограммированы и включают в себя диапазоны значений абсолютных значений и относительных значений, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
46. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать плавность и регулярность изменений позиции указанных сил за указанные периоды замаха, включающих в себя следующие силы и периоды: силы левой ступни и правой ступни, пальцев и пятки в ходе обратного замаха; силы левой ступни и правой ступни, пальцев и пятки в ходе маха вниз; силы левой ступни и правой ступни, поперечные силы ступни в ходе обратного замаха; силы левой ступни и правой ступни, поперечные силы ступни в ходе маха вниз; силы левой ступни и правой ступни в ходе обратного замаха; силы левой ступни и правой ступни в ходе маха вниз; комбинированные силы левой и правой ступни в ходе обратного замаха; комбинированные силы левой и правой ступни в ходе маха вниз; и опционально, обнаружение изменения включает в себя сравнение последовательных значений позиции, когда позиция дискретизируется через регулярные интервалы времени, а плавность или регулярность определяется посредством относительной максимальной амплитуды разностей в изменениях и частоты возникновения этих изменений, в сравнении с доступными справочными данными, доступными вычислительному средству, включающими в себя заранее запрограммированные доступные справочные данные, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
47. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать плавность и регулярность изменений амплитуды указанных сил за указанные периоды замаха, включающих в себя следующие силы и периоды: силы левой ступни и правой ступни, пальцев и пятки в ходе обратного замаха; силы левой ступни и правой ступни, пальцев и пятки в ходе маха вниз; силы левой ступни и правой ступни, поперечные силы ступни в ходе обратного замаха; силы левой ступни и правой ступни, поперечные силы ступни в ходе маха вниз; силы левой ступни и правой ступни в ходе обратного замаха; силы левой ступни и правой ступни в ходе маха вниз; комбинированные силы левой и правой ступни в ходе обратного замаха; комбинированные силы левой и правой ступни в ходе маха вниз; и опционально, обнаружение изменения включает в себя сравнение последовательных значений амплитуды, когда амплитуда дискретизируется через регулярные интервалы времени, а плавность или регулярность определяется посредством относительной максимальной амплитуды разностей в изменениях и частоты возникновения этих изменений, в сравнении с доступными справочными данными, доступными вычислительному средству, включающими в себя заранее запрограммированные доступные справочные данные, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
48. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать движение таза игрока посредством определения степени переноса силы с пятки на пальцы на левой ступне и с пальцев на пятку на правой ступне при обратном замахе, а также степени переноса силы с пальцев на пятку на левой ступне и с пятки на пальцы на правой ступне при махе вниз, и сравнения значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя диапазоны соотношений сил на пальцы/пятки в начале и конце обратного замаха и в начале и конце маха вниз, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
49. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать распределение по времени, направление и амплитуду общего переноса веса к целевому или заданному направлению посредством включения проверки направления и амплитуды комбинированной силы на обе ступни в релевантные моменты в ходе замаха и сравнения значений с доступными справочными данными, доступными вычислительному средству, причем релевантные моменты включают в себя точку во времени, близкую к окончанию обратного замаха, точку во времени, ассоциативно связанную с переходом между обратным замахом и махом вниз, а также точки во времени через интервалы в течение маха вниз; и опционально, доступные справочные данные заранее запрограммированы и включают в себя для релевантных моментов диапазоны направлений и амплитуд, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
50. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать амплитуды и распределение по времени точек силы перед ускорением и точек пиковой силы относительно друг друга и с определенными амплитудами и распределением по времени соответствующих сил в начале и конце маха вниз и сравнивать их с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя диапазоны соотношений амплитуд силы и значений позиций для отдельных ступней и для комбинации обеих ступней, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершением.
51. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать продольное совмещенное со ступней и/или продольное равновесие игрока в ходе замаха, для каждой ступни и для комбинации ступней посредством сравнения сил на пальцы и пятку на каждой ступне и относительной взаимосвязи между ними с релевантными критериями для каждой стадии замаха, а также сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя диапазоны значений сил пальцев/пятки для отдельных ступней и для комбинации из обеих ступней при подготовке к удару, в начале и конце обратного замаха и в начале и конце маха вниз, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
52. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать поперечное равновесие в комбинации обеих ступней посредством проверки поперечной позиции комбинированной равнодействующей силы относительно позиций ступней для каждой стадии замаха и сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя диапазоны значений поперечных левых/правых сил для левой ступни и правой ступни при подготовке к удару, в нескольких точках в течение обратного замаха и маха вниз, в том числе в начале и конце, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
53. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать поперечное совмещенное со ступней и/или поперечное качение левой или правой ступни игрока посредством проверки поперечных совмещенных со ступней и/или поперечных позиций равнодействующих сил на каждую ступню относительно этой ступни для каждой стадии замаха и сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя диапазоны значений поперечных совмещенных со ступней или поперечных левых/правых сил для левой и правой ступни при подготовке к удару, в нескольких точках в течение обратного замаха и маха вниз, в том числе в начале и конце, поперечных совмещенных со ступней или поперечных левых/правых сил для отдельной левой и правой ступни при подготовке к удару, в начале и конце обратного замаха и в начале и конце маха вниз, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, а вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
54. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять или оценивать продолжительность между окончанием обратного замаха, относящегося к тазу, и окончанием обратного замаха клюшки и относительные задержки при полном переходе от обратного замаха к замаху вниз посредством статистического анализа продолжительности и амплитуды наименьшего изменения для выбранного диапазона переменных, которые, как известно, типично снижают свою частоту изменения во время полного перехода, в том числе позиций и амплитуд силы на ступни, пальцы и пятку для обеих ступней, а также сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные могут быть заранее запрограммированы и включают в себя диапазоны значений абсолютных значений и относительных значений, соответствующие обстоятельствам, определенным в связи с поэтапным совершением, и где вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
55. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять то, поднимает ли игрок ступню с поверхности, на которой стоят, посредством проверки того, снижается ли амплитуда равнодействующей силы до нулевого значения или практически нулевого значения, и сравнения этих значений с доступными справочными данными, доступными вычислительному средству; опционально, доступные справочные данные заранее запрограммированы и включают в себя варьирующуюся классификацию ошибок для возникновения в периоде до обратного замаха, периоде обратного замаха и маха вниз и периоде завершения, и где вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
56. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять, плавно перемещает или поворачивает ли игрок ступню в другую позицию на поверхности, на которой стоят, посредством проверки того, перемещается ли позиция равнодействующей силы за пределы границ равнодействующих, установленных для позиции ступни, и сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя варьирующуюся классификацию ошибок для возникновения в периоде до обратного замаха, периоде обратного замаха и маха вниз и периоде завершения, граничные пределы вычисляются в заранее определенном отношении с характеристиками, задающим позицию ступни, и где вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
57. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью определять, поворачивает ли игрок ступню на неподвижной поверхности, посредством проверки того, снижается ли модуль составляющей силы пятки или составляющей силы пальцев до нулевого значения или практически нулевого значения, и сравнения этих значений с доступными справочными данными, доступными вычислительному средству; и опционально, доступные справочные данные заранее запрограммированы и включают в себя варьирующуюся классификацию ошибок для возникновения в периоде до обратного замаха, периоде обратного замаха и маха вниз и периоде завершения, и где вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
58. Устройство по п.44, в котором вычислительное средство функционирует с возможностью определять или оценивать относительную согласованность различных замахов посредством определения разностей в их релевантных характеристиках и сравнения значений этих разностей с доступными справочными данными, доступными вычислительному средству, причем релевантные характеристики содержат любые измеренные или определенные характеристики, которые релевантны требуемым показателям согласованности и включают в себя любое значение или характеристику, которая сравнивается с доступными справочными данными, доступными вычислительному средству; и опционально, разности релевантных характеристик выражаются как безразмерные объектные сущности, такие как соотношения, а доступные справочные данные заранее запрограммированы и включают в себя варьирующуюся классификацию для согласованности, соответствующую обстоятельствам, и где вычислительное средство сопоставляет выполнение игрока с доступными справочными данными и ассоциативно связывает соответствующее поэтапное совершение.
59. Устройство по п.26 или 27, в котором вычислительное средство функционирует с возможностью выборочно назначать меньшую важность в соответствии с доступными справочными данными, доступными вычислительному средству, чтобы форсировать измерения для очень слабо нагруженной ступни в сравнении с измерениями для относительно сильно нагруженной ступни при определении или оценке вероятного времени характерных событий или выполнения игрока на основе изменений, по отдельной ступне, сил пальцев, пятки или равнодействующих сил; и опционально, доступные справочные данные заранее запрограммированы и указывают оценку меньшей важности для очень слабо нагруженной ступни, если необычные силы пальцев, пятки или равнодействующие силы обнаружены.
60. Устройство по п.26 или 27, в котором вычислительное средство дополнительно принимает и обрабатывает сигналы от датчиков, которые измеряют горизонтальные силы на платформы для ступней.
61. Устройство для измерения и анализа связанных со ступнями игрока сил в ходе замаха при игре в гольф или замаха в других видах спорта, который аналогичен замаху при игре в гольф, содержащее поверхность, на которой стоит игрок; средство связи; и множество сенсорных средств, функционирующих с возможностью измерять силу; причем (А) - поверхность, на которой стоят, содержит две отдельные платформы для ступней, предназначенные для ступней игрока, каждая платформа для ступни содержит опорную конструкцию, которая включает в себя поверхность или активную поверхность, при этом вертикальные силы на опорную конструкцию распределяются на множество дискретных позиций; (В) сенсорные средства размещаются в дискретных позициях, на которые распределяются вертикальные силы; сенсорные средства функционируют с возможностью измерять вертикальные силы; (С) устройство также содержит вычислительное средство, которое функционирует с возможностью анализировать замах и включает в себя: средство, которое функционирует с возможностью принимать и по отдельности обрабатывать сигналы от отдельных или групп сенсорных средств; средство, которое функционирует с возможностью определять относительные амплитуды и позиции равнодействующих сил посредством разрешения равновесия сил, в том числе отдельных сил, измеряемых посредством сенсорных средств в связи с дискретными позициями сенсорных средств; средство, которое функционирует с возможностью анализировать и оценивать числовые данные, связанные с измеренными позициями и амплитудами сил; и (D) вычислительное средство также функционирует с возможностью определять силы, действующие отдельно на левую и правую стопу игрока, и объединенную результирующую силу от обеих стоп игрока посредством разложения баланса сил или характеристик сил, определенных для отдельных стоп относительно дискретных заданных позиций сенсорных средств, и с помощью платформ для ступней, расположенных боковыми сторонами рядом друг с другом; вычислительное средство также функционирует с возможностью анализировать замах посредством определения или оценки сил от сенсорных средств в отношении структуры характерных событий; и/или определенных позиций ступней; и объема информации, доступного для вычислительного средства, содержащего доступные справочные данные; где: определение или оценка, связанная со структурой характерных событий, содержит отображение времен различных обнаруживаемых главных событий, которые являются общими для всех обычных замахов; и определение или оценка, связанная с определенными позициями ступней, содержит статистический анализ группы равнодействующих сил, измеренных посредством сенсорных средств, когда игрок смещает вес со ступни в этой позиции; и доступные справочные данные включают в себя: информацию, связанную с известным выполнением замаха, в том числе критерии, которые дают возможность оценить или дифференцировать различные аспекты выполнения в сравнении с тем, что считается хорошим или плохим выполнением, когда доступные справочные данные подготовлены; и/или информацию, к которой получают доступ посредством вычислительного средства от средства ведения журналов, функционирующего с возможностью регистрировать информацию, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его или ее предшествующем выполнении; и/или информацию, которая доступна посредством вычислительного средства от взаимодействующего средства для взаимодействия с другими устройствами или системами, при этом взаимодействующее средство функционирует с возможностью принимать дополнительную информацию о замахе от других устройств или систем.
62. Способ измерения связанных со ступнями игрока сил в ходе замаха при игре в гольф или замаха в других видах спорта, который аналогичен замаху при игре в гольф, посредством: вставания игрока каждой ступней на платформу для ступни и распределения вертикальных сил, сформированных для множества дискретных позиций; измерения вертикальных сил, сформированных в дискретных позициях; определения относительных амплитуд и позиций равнодействующих сил посредством разрешения равновесия сил, в том числе отдельных сил, измеряемых в дискретных позициях; анализа и оценки числовых данных, связанных с измеренными позициями и амплитудами сил; и (А) анализа замаха посредством определения или оценки сил в сравнении со структурой характерных событий; и/или определенными позициями ступней; и объемом информации, содержащей доступные справочные данные; где: определение или оценка, связанная со структурой характерных событий, содержит отображение времен различных обнаруживаемых главных событий, которые являются общими для всех обычных замахов; и определение или оценка, связанная с определенными позициями ступней, содержит статистический анализ группы измеренных равнодействующих сил, когда игрок смещает вес со ступней в этой позиции; и доступные справочные данные включают в себя: информацию, связанную с известными выполнениями замаха, в том числе критерии, которые дают возможность оценить или дифференцировать различные аспекты игры в сравнении с тем, что считается хорошим или плохим выполнением, когда доступные справочные данные подготовлены; и/или информацию, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его предшествующего выполнения; и/или дополнительную информацию по замаху от других устройств и систем; и/или (В) анализа замаха и связи с игроком без помощи стороннего специалиста, технического специалиста или эксперта, посредством программирования и использования вычислительных средств, чтобы определять, оценивать или производить оценку выбора из следующего: а) моменты времени, когда происходят характерные события, b) характеристики, содержащие продолжительности между характерными событиями, и относительные отношения длительностей между характерными событиями, посредством сравнения этих характеристик с доступными справочными данными, доступными вычислительному средству, с) плавность или регулярность изменений в позиции или амплитуде указанных сил в указанные периоды замаха, d) распределение по времени и направление объединенной силы в обеих стопах во время замаха и сравнение значений с доступными справочными данными, е) распределение по времени и амплитуда объединенной силы в обеих стопах во время замаха и сравнение значений с доступными справочными данными, f) боковая балансировка через объединение обеих стоп посредством проверки боковой позиции объединенной результирующей силы относительно позиции стоп, по каждой стадии замаха, и сравнение значений с доступными справочными данными, доступными вычислительному средству, и g) согласованность относительно различных замахов посредством определения разностей в относительных характеристиках и сравнения значений этих разностей.
63. Способ измерения связанных со ступнями игрока сил в ходе замаха при игре в гольф или замаха в других видах спорта, который аналогичен замаху при игре в гольф, посредством: вставания игрока каждой ступней на платформу для ступни и распределения сгенерированных вертикальных сил на множество дискретных позиций; измерения вертикальных сил, сгенерированных в дискретных позициях; определения отношения, амплитуд и позиций результирующих сил посредством разрешения баланса сил, в том числе отдельных сил, измеряемых в дискретных позициях; анализа и оценки числовых данных, связанных с измеренными позициями и амплитудами сил; (А) определения сил, действующих отдельно на левую и правую стопу игрока, и объединенной результирующей силы от обеих стоп игрока посредством разложения баланса сил или характеристик сил, определенных для отдельной стопы относительно дискретных заданных позиций сенсорных средств, и с помощью платформ для ступней, расположенных боковыми сторонами рядом друг с другом; и (В) анализа замаха посредством определения или оценки сил в сравнении со структурой характерных событий; и/или определенными позициями ступней; и объемом доступной информации, содержащей доступные справочные данные; где: определение или оценка, связанная со структурой характерных событий, содержит отображение времен различных обнаруживаемых главных событий, которые являются общими для всех обычных замахов; и определение или оценка, связанная с определенными позициями ступней, содержит статистический анализ группы измеренных равнодействующих сил, когда игрок смещает вес со ступней в этой позиции; и доступные справочные данные включают в себя: информацию, связанную с известными выполнениями замаха, в том числе критерии, которые дают возможность оценить или дифференцировать различные аспекты игры в сравнении с тем, что считается хорошим или плохим выполнением, когда доступные справочные данные подготовлены; и/или информацию, касающуюся предыдущих замахов, сделанных игроком, или информацию по игроку или его предшествующего выполнения; и/или дополнительную информацию о замахе от других устройств и систем.
| US 6402635 В1, 11.06.2002 | |||
| US 6039658 А, 21.03.2000 | |||
| US 6225977 В1, 01.05.2001 | |||
| СПОСОБ ИГРЫ В ГОЛЬФ | 2002 |
|
RU2235574C2 |

