Изобретение относится к геофизическому приборостроению, а именно к области гравиметрии, и предназначено для выставления вертикали лазерного луча в баллистическом гравиметре при проведении высокоточных абсолютных измерений силы тяжести или ее приращений.
Известны технические решения для измерения абсолютных значений ускорения свободного падения, так называемые "баллистические гравиметры", основанные на измерении параметров движения пробного тела в поле силы тяжести (Справочник геофизика. // Под ред. Мудрецовой Е.А., Веселова К.Е., М.: Недра, 1990; Гравиметрия: Учебник для вузов. - М.: Недра, 1980 // Юзефович А.П., Огородова Л.В.). При абсолютных измерениях силы тяжести свободное движение тела осуществляется либо симметричным, либо несимметричным способами. При симметричном способе пробное тело подбрасывается вверх, а измерение параметров движения производится как на восходящем, так и на нисходящем участке траектории его движения. При несимметричном способе измерение параметров движения производится при движении пробного тела вниз (альтернативное название способа - свободное падение). Поскольку принцип действия баллистического гравиметра заключается в измерении параметров движения (интервалов пути и времени) пробного тела в процессе его свободного падения, решающее значение имеет точность определения этих интервалов пути и времени. На современном этапе развития техники для измерения интервалов времени применяется в качестве эталона стандарт частоты, а измерение интервалов пути производится с помощью лазерного интерферометра. При использовании лазерного интерферометра одним из наиболее критических факторов является выставление измерительного луча в интерферометре по вертикали. Отклонение направления луча от вертикали на угол ср приводит к ошибке определения гравитационного ускорения:
Где g - ускорение свободного падения, φ - угол отклонения луча от вертикали.
Из этого соотношения следует, что для определения д с погрешностью, не превышающей 1-2 мкГал (1-2×10-8 м/с2) выставление вертикали лазерного луча должно производиться с точностью не менее 4.5×10-5 Rad. Применение высокоточных инклинометров не решает проблемы, так как в этом случае требуется привязка базовой плоскости инклинометра к местной вертикали которую и требуется определить.
Известно техническое решение выставления вертикали лазерного луча, по жидкому зеркалу - кюветы заполненной ртутью, спиртовыми растворами, вакуумным маслом или другой жидкостью с хорошей отражательной способностью, где лазерный луч выставляется перпендикулярно горизонтальной поверхности жидкости (Патент США №5351122, «Absolute gravity inline measuring apparatus incorporating improved operating features» МПК G01P 3/38, публ. 27.09.1994). Это техническое решение используется в баллистических гравиметрах основанных как на способе свободного падения, так и в гравиметрах, основанных на симметричном способе измерений. H.Hu, S.Svitlov, C.Rothleitner, J.Sch.afer, J.Zhang and L.J.Wang «Improvements of the MPG-2 transportable absolute ballistic gravimeter», Metrologia 47 (2010) 575-582; D'Agostino G, Desogus S, Germak A, Origlia C, Quagliotti D, Berrino G, Corrado G, d'Errico V and Ricciardi G «The new IMGC-02 transportable absolute gravimeter: measurement apparatus and applications in geophysics and volcanology». 2008. Ann. Geophys. 51 39-49.
Недостатком указанного технического решения являются высокая чувствительность к вибросейсмическим помехам, вызывающим колебания поверхности жидкости. Кроме того, контроль вертикали лазерного луча возможен только при статическом положении свободно падающего тела гравиметра.
Известен способ и устройство включающее: баллистический блок, представляющий собой вакуумную камеру, в которой реализуется свободное падение пробного тела несущего оптический уголковый отражатель; лазер; интерферометр, образованный отражателем на падающем теле, лучеделителем и референтным уголковым отражателем входящем в систему виброзащиты; измерительно-вычислительную систему - основанные на использовании жидкого зеркала для выставления вертикали луча (Niebauer Т.М., Sasagawa G.S., Faller J.Е., Klopping F. «A new generation of absolute gravimeters». Metrologia 32 (1995), 159-80), выбранные в качестве прототипа. При этом луч, генерируемый лазером, направляется на светоделительную систему интерферометра, где расщепляется на два луча, референтный луч непосредственно направляется в телескопическую систему, а измерительный луч направляется на уголковый отражатель, закрепленный на свободно падающем теле, отражается от него и попадает на жидкое зеркало, выполненное в виде дополнительной выдвижной кюветы. Луч отражается от горизонтальной поверхности жидкости и также направляется светоделителем в телескопическую систему, где сравнивается с опорным лучом. При совпадении направления измерительного луча с вертикалью отраженный от жидкого зеркала луч, поступающий в телескопическую систему, параллелен референтному лучу. В случае отклонения измерительного луча от вертикали, отраженный от жидкого зеркала луч приходит в телескопическую систему под некоторым углом относительно референтного луча. Поворотом светоделителя добиваются параллельности луча отраженного от жидкого зеркала в телескопической системе относительно референтного луча, что соответствует вертикальности выставления измерительного луча, и кювету жидкого зеркала, перекрывающую направление лучей интерферометра, убирают.
Недостатком указанного способа и устройства для его осуществления является высокая чувствительность к вибросейсмическим помехам, вызывающим колебания поверхности жидкости. Кроме того, контроль вертикали лазерного луча возможен только при статическом положении свободно падающего тела гравиметра. Это обстоятельство обуславливает прерывание процесса измерения g для контроля и коррекции направления луча и препятствует автоматизации выставления вертикали лазерного луча.
Перед авторами ставилась задача - разработать способ выставления вертикали лазерного луча в баллистическом гравиметре и устройство для его осуществления, позволяющие автоматизировать процедуру выставления вертикали лазерного луча в процессе свободно падения тела в гравиметре и устранить влияние микросейсмических колебаний постамента, препятствующих контролю и выставлению вертикали луча.
Поставленная задача решается тем, что в способе выставления вертикали лазерного луча в баллистическом гравиметре, включающем использование лазера, светоделителя, уголкового отражателя, закрепленного на свободнопадающем теле гравиметра и образующего рабочее плечо лазерного интерферометра, блока для определения величины и направления угла отклонения измерительного луча от вертикали, блока коррекции направления измерительного луча, определение величины и направления угла отклонения измерительного луча от вертикали, выполнение коррекции направления измерительного луча - дополнительно производят регистрацию траектории смещения измерительного луча отраженного от уголкового отражателя в процессе свободного падения тела в гравиметре регистратором траектории смещения измерительного луча, а определение величины и направления угла отклонения измерительного луча от вертикали проводят блоком для определения величины и направления угла отклонения измерительного луча от вертикали, выполненным в виде анализатора траектории смещения измерительного луча, осуществляя покадровую обработку видеозаписи траектории смещения измерительного луча, при этом определяют параметры смещения измерительного луча, выделяют линейную и квадратичную составляющие смещения измерительного луча методом регрессионного анализа, определяют отклонение измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали, формируют управляющие сигналы для блока коррекции направления измерительного луча, выполнение коррекции направления измерительного луча производят с помощью базовой площадки, на которой закреплен лазерный интерферометр, установленную на трех точечных опорах, одну из опор выполняют неподвижной, а две другие опоры выполняют перемещающимися под управлением сигналов полученных с анализатора траектории смещения в вертикальной плоскости линейными актуаторами, выполненными в виде шагового двигателя с передачей винт-гайка и направляющими находящимися внутри корпуса, при этом дополнительно используют регистратор траектории смещения измерительного луча, отраженного от уголкового отражателя в процессе свободного падения тела, состоящий из видеокамеры, кроме того, блок для определения величины и направления угла отклонения измерительного луча от вертикали выполняют в виде анализатора траектории смещения измерительного луча, содержащего узел покадровой обработки видеозаписи траектории смещения измерительного луча, узел определения параметров смещения измерительного луча, узел выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, узел определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали и узел формирования управляющих сигналов для блока коррекции направления измерительного луча, причем регистратор траектории смещения измерительного луча выполняют в виде видеокамеры.
Способ реализуется с помощью устройства включающего лазер, светоделитель, уголковый отражатель, закрепленный на свободнопадающем теле гравиметра, образующего рабочее плечо лазерного интерферометра, блок для определения величины и направления угла отклонения измерительного луча от вертикали, блок коррекции направления измерительного луча, кроме того, устройство дополнительно содержит регистратор траектории смещения измерительного луча, отраженного закрепленным на падающем теле уголковым отражателем в процессе свободного падения тела, а блок для определения величины и направления угла отклонения измерительного луча от вертикали выполнен в виде анализатора траектории смещения измерительного луча, содержащего узел покадровой обработки видеозаписи траектории смещения измерительного луча, узел определения параметров смещения измерительного луча, узел выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, узел определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали и узел формирования управляющих сигналов для блока коррекции направления измерительного луча, блок коррекции направления измерительного луча выполнен содержащим базовую площадку, на которой закреплен лазерный интерферометр, установленную на трех точечных опорах, одна из опор выполнена неподвижной, а две другие опоры выполнены перемещающимися под управлением сигналов полученных с анализатора траектории смещения измерительного луча в вертикальной плоскости линейными актуаторами, выполненными в виде шагового двигателя с передачей винт-гайка и направляющими находящимися внутри корпуса, причем регистратор траектории смещения измерительного луча выполнен в виде видеокамеры.
Технический эффект заявляемого технического решения заключается в повышении точности выставления вертикали лазерного луча в баллистическом гравиметре, уменьшении погрешности измерения абсолютного значения ускорения силы тяжести, уменьшении чувствительности к вибросейсмическим помехам.
Заявляемый способ выставления вертикали лазерного луча в баллистическом гравиметре реализуется с помощью устройства, которое поясняется блок-схемой, представленной на фиг.1, где 1 - лазер, 2 - светоделитель, 3 - измерительный луч, 4 - референтный луч, 5 - уголковый отражатель, 6 - регистратор траектории смещения измерительного луча, 7 - стартовое положение, 8 - линия вертикали, 9 - направление движения уголкового отражателя, 10 - финишное положение, 11 - анализатор траектории смещения измерительного луча, 12 - узел покадровой обработки видеозаписи траектории смещения отраженного луча, 13 - узел определения параметров смещения измерительного луча, 14 - узел выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, 15 - узел определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали, 16 - узел формирования управляющих сигналов, 17 - блок коррекции направления измерительного луча, 18 - базовая площадка, 19 - неподвижная опора, 20 - подвижная опора, 21 - линейный актуатор.
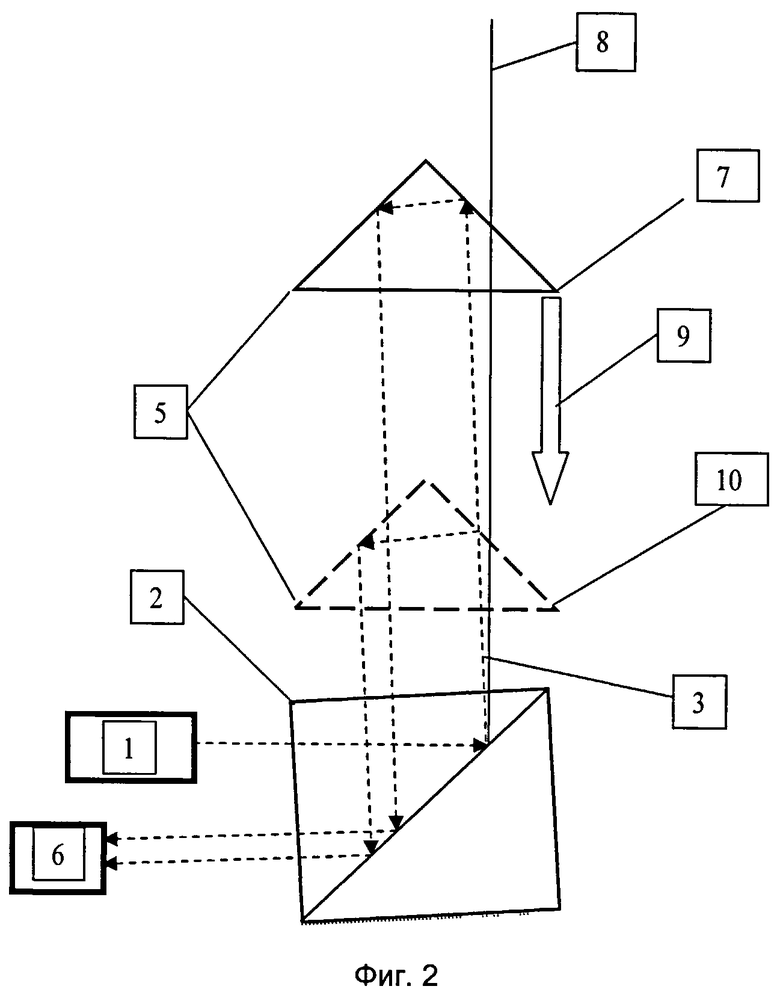
На фиг.2 представлен ход лучей в оптической схеме баллистического гравиметра при отклонении измерительного луча от вертикали, где 1 - лазер, 2 - светоделитель, 3 - измерительный луч, 5 - уголковый отражатель, 6 - регистратор траектории смещения измерительного луча, 7 - стартовое положение, 8 - линия вертикали, 9 - направление движения уголкового отражателя, 10 - финишное положение.
Заявляемый способ выставления вертикали лазерного луча в баллистическом гравиметре основан на двух физических эффектах, а именно: свободно падающее тело всегда движется по направлению вертикали и луч, выходящий из уголкового отражателя, параллелен входящему лучу. Из этого следует, что если направление рабочего луча совпадает с вертикалью, то луч, приходящий из уголкового отражателя во время его свободного падения, всегда попадает в одну и ту же точку. Если направление рабочего луча не совпадает с вертикалью, то приходящий луч при свободном падении уголкового отражателя смещается относительно начального положения.
Принцип работы заявляемого способа выставления вертикали лазерного луча в баллистическом гравиметре и устройства для его реализации можно пояснить на основе фиг.1 и фиг.2. Луч, генерируемый лазером 1, направляется на светоделитель 2 и расщепляется на измерительный луч 3 и референтный луч 4. Измерительный луч 3 направляется на уголковый отражатель 5, закрепленный на свободнопадающем теле гравиметра, образующий рабочее плечо лазерного интерферометра, и после отражения попадает на регистратор траектории смещения измерительного луча 6, выполненный в виде видеокамеры. В процессе свободного падения тела в гравиметре уголковый отражатель 5 перемещается из стартового положения 7 вдоль линии вертикали 8 в направлении указанном стрелкой 9 и переходит в финишное положение 10. Изображение измерительного луча 3 в плоскости матрицы регистратора траектории смещения измерительного луча 6, выполненного в виде видеокамеры, при этом переместится из положения соответствующего нахождению уголкового отражателя в стартовом положении в положение соответствующее нахождению уголкового отражателя в финишном положении 8. Траектория смещения изображения измерительного луча 3 в процессе свободного падения уголкового отражателя 5 фиксируется регистратором траектории смещения измерительного луча 6. Направление, величина и скорость перемещения изображения измерительного луча 3 в плоскости матрицы видеокамеры зависят от отклонения измерительного луча 3 от вертикали и начальной скорости уголкового отражателя 5 обусловленной воздействием микросейсмических колебаний постамента. Микросейсмические колебания постамента, воздействующие на устройство, придают дополнительный импульс падающему телу в момент его отрыва из стартового положения, что вызывает изменение начальной скорости падающего тела. При этом зависимость смещения луча от времени свободного падения уголкового отражателя на видеокамере представляется в виде:


Где X(t) и Y(t) - проекции смещения изображения луча на матрице видеокамеры по координатам x и y, L(t) - путь, пройденный свободнопадающим телом за время t, g - значение ускорения свободного падения на данном пункте, φx - угол отклонения измерительного луча от вертикали в направлении соответствующим координате x, φy - угол отклонения измерительного луча от вертикали в направлении соответствующим координате y, νx, νy и νz - компоненты начальной скорости движения уголкового отражателя по соответствующим координатам.
Практическое определение величины и направления угла отклонения измерительного луча 3 от вертикали проводят анализатором траектории смещения 11 измерительного луча. Анализатор траектории смещения 11 измерительного луча состоит из узла 12 покадровой обработки видеозаписи траектории смещения измерительного луча, узла 13 определения параметров смещения измерительного луча, узла 14 выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, узла 15 определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали и узла 16 формирования управляющих сигналов для блока 17 коррекции направления измерительного луча.
Оценка разрешающей способности устройства показывает, что при полной длине свободного падения определяемой габаритами вакуумной камеры L=0.5 м и максимально допустимым углом отклонения измерительного луча 3 от вертикали φ=4.5×10-5 Rad величина смещения изображения луча в плоскости регистратора 6 траектории смещения измерительного луча составляет порядка 45 мкм. При использовании стандартной видеокамеры с разрешением 8 мкм на 1 пиксель указанное смещение составляет не менее 5 пикселей, что вполне удовлетворяет требуемой точности измерения параметров смещения измерительного луча 3. Использование видеокамеры в качестве регистратора 6 траектории смещения измерительного луча в процессе свободного падения позволяет не только зафиксировать положение изображения измерительного луча 3 на матрице видеокамеры в начале и в конце сводного падения тела, но и отследить процесс движения измерительного 3 луча в динамике. Разрешающая способность регистратора 6 траектории смещения измерительного луча составляет 90 кадров/с, поэтому за время свободного падения тела регистрируется до 26 кадров. По информации поступающей с регистратора траектории смещения 6 измерительного луча в анализатор 11 траектории смещения измерительного луча узлом 12 покадровой обработки видеозаписи траектории смещения измерительного луча проводится обработка видеозаписи. И поскольку свободно падающее тело движется с ускорением, траектория смещения измерительного луча 3 в кадрах видеозаписи представляется квадратичной функцией и далее поступает в узел 13 определения параметров смещения измерительного луча. Информация с узла 13 определения параметров смещения измерительного луча поступает в узел 14 выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа. Линейная составляющая характеризует начальную скорость падающего тела, обусловленную влиянием микросейсмических колебаний постамента, а квадратичная составляющая обусловлена ускоренным движением свободнопадающего тела в направлении вертикали. Далее, в узле 15 определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали производится исключение линейной составляющей смещения луча, устраняющее вклад начальной скорости на параметры движения, и по функциональной зависимости смещения от угла отклонения измерительного луча 3 от вертикали вычисляется величина и направление отклонения луча от вертикали. Затем в узле 16 формирования управляющих сигналов формируется информация о необходимой коррекции направления измерительного 3 луча, которая поступает в блок коррекции 17 направления измерительного луча.
Блок коррекции 17 направления измерительного луча состоит из базовой площадки 18, на которой закреплен лазерный интерферометр. Базовая площадка 18, установлена на трех точечных опорах. Одна из опор 19 базовой площадки 18 выполнена неподвижной, а две другие опоры 20 выполнены перемещающимися в вертикальной плоскости под управлением сигналов полученных с анализатора 11 траектории смещения измерительного луча линейными актуаторами 21. Линейные актуаторы 21 обеспечивают наклон базовой площадки и, соответственно, поворот плоскости светоделителя 2 лазерного интерферометра в двух направлениях, тем самым, изменяя направление измерительного луча. Линейный актуаторы 21 представляют собой шаговый двигатель с передачей винт-гайка и направляющими находящимися внутри корпуса обеспечивающими перемещение базовой площадки 18. По информации с анализатора 11 траектории смещения измерительного луча производится требуемое число шагов двигателей линейных актуаторов 21 в необходимом направлении. Линейные актуаторы 21 обеспечивают перемещение 4 мкм на шаг двигателя, это позволяет при расстоянии между опорами 350 мм производить коррекцию направления луча с дискретностью 10-5 Rad, что обеспечивает требуемую точность выставления вертикали луча.
Экспериментальная проверка способа производилась с использованием типовой видеокамеры Philips SPC1300NC в устройстве измерения параметров смещения лазерного луча и линейных актуаторов Haydon Kerk-57K4P в устройстве изменения направления луча. Анализ покадровой обработки и управления устройствами осуществлялись компьютером по разработанной программе.
Экспериментальная проверка показала, что заявляемый способ позволяет выставлять вертикаль лазерного луча в баллистическом гравиметре с точностью до 4×10-5 Rad, при этом погрешность определения абсолютного значения ускорения силы тяжести, обусловленная несовпадением направления луча с вертикалью, не превышает 1 мкГал.
Таким образом, предложен новый способ выставления вертикали лазерного луча в баллистическом гравиметре и устройство для его реализации, принципиально отличающееся от существующих технических решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фильтрации значений параметров единичных бросков в процессе измерения в оптической схеме абсолютных гравиметров | 2024 |
|
RU2841495C1 |
| Способ выставления вертикали рабочего лазерного луча в баллистическом гравиметре | 2019 |
|
RU2724122C1 |
| АБСОЛЮТНЫЙ БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР | 2011 |
|
RU2475786C2 |
| БАЛЛИСТИЧЕСКИЙ ЛАЗЕРНЫЙ ГРАВИМЕТР | 2001 |
|
RU2193786C1 |
| БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР | 2013 |
|
RU2554596C1 |
| Интерферометр абсолютного гравиметра | 2017 |
|
RU2663542C1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2013 |
|
RU2544262C2 |
| Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления | 2018 |
|
RU2683117C1 |
| СИММЕТРИЧНЫЙ СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ | 2001 |
|
RU2207601C1 |
| СПОСОБ ИЗМЕРЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ И ГРАВИМЕТРЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523108C1 |
Изобретение относится к геофизическому приборостроению, а именно к области гравиметрии, и предназначено для выставления вертикали лазерного луча в баллистическом гравиметре при проведении высокоточных абсолютных измерений силы тяжести или ее приращений. Сущность способа заключается в отслеживании смещения лазерного луча отраженного от свободно падающего тела в процессе его движения с помощью видеокамеры, вычисления по данным видеозаписи угла отклонения лазерного луча от вертикали и коррекции направления луча в требуемую сторону. Технический результат заключается в обеспечении возможностей повышения точности выставления вертикали лазерного луча в баллистическом гравиметре, уменьшения погрешности измерения абсолютного значения ускорения силы тяжести, уменьшения чувствительности к вибросейсмическим помехам. 2 н. и 2 з.п. ф-лы, 2 ил.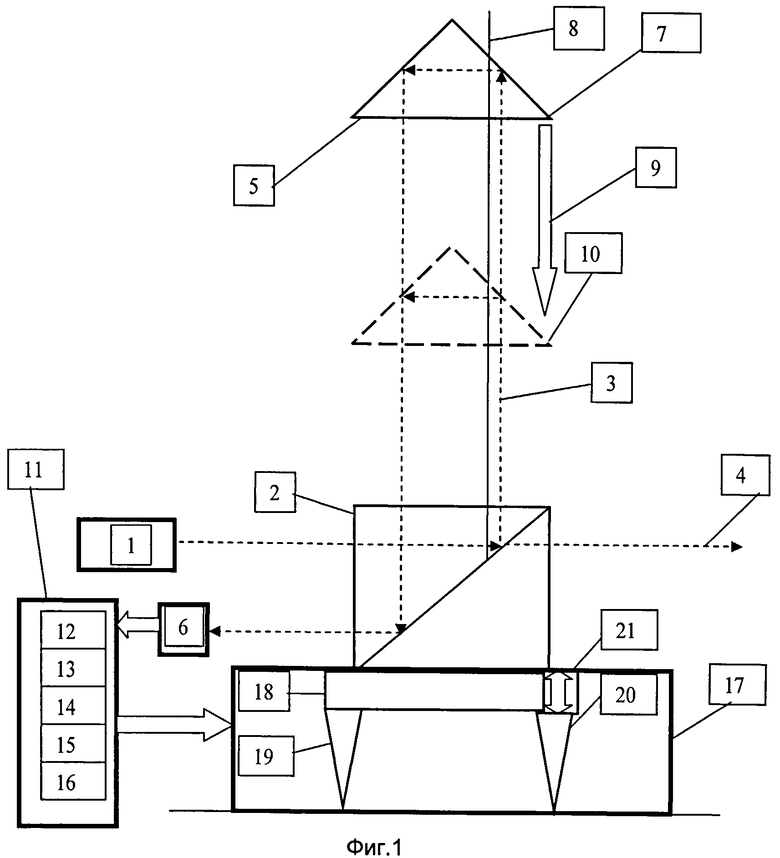
1. Способ выставления вертикали лазерного луча в баллистическом гравиметре, включающий использование лазера, светоделителя, уголкового отражателя, закрепленного на свободнопадающем теле гравиметра, образующего рабочее плечо лазерного интерферометра, блока для определения величины и направления угла отклонения измерительного луча от вертикали, блока коррекции направления измерительного луча, определение величины и направления угла отклонения измерительного луча от вертикали, выполнение коррекции направления измерительного луча, отличающийся тем, что дополнительно производят регистрацию траектории смещения измерительного луча, отраженного от уголкового отражателя в процессе свободного падения тела в гравиметре регистратором траектории смещения измерительного луча, а определение величины и направления угла отклонения измерительного луча от вертикали проводят блоком для определения величины и направления угла отклонения измерительного луча от вертикали, выполненным в виде анализатора траектории смещения измерительного луча, осуществляя покадровую обработку видеозаписи траектории смещения измерительного луча, при этом определяют параметры смещения измерительного луча, выделяют линейную и квадратичную составляющие смещения измерительного луча методом регрессионного анализа, определяют отклонение измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали, формируют управляющие сигналы для блока коррекции направления измерительного луча, выполнение коррекции направления измерительного луча производят с помощью базовой площадки, на которой закреплен лазерный интерферометр, установленной на трех точечных опорах, одну из опор выполняют неподвижной, а две другие опоры выполняют перемещающимися под управлением сигналов, полученных с анализатора траектории смещения в вертикальной плоскости линейными актуаторами, выполненными в виде шагового двигателя с передачей винт-гайка, и направляющими, находящимися внутри корпуса, при этом дополнительно используют регистратор траектории смещения измерительного луча, отраженного от уголкового отражателя в процессе свободного падения тела, состоящий из видеокамеры, кроме того, блок для определения величины и направления угла отклонения измерительного луча от вертикали выполняют в виде анализатора траектории смещения измерительного луча, содержащего узел покадровой обработки видеозаписи траектории смещения измерительного луча, узел определения параметров смещения измерительного луча, узел выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, узел определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали и узел формирования управляющих сигналов для блока коррекции направления измерительного луча.
2. Способ по п.1, отличающийся тем, что регистратор траектории смещения измерительного луча выполняют в виде видеокамеры.
3. Устройство выставления вертикали лазерного луча в баллистическом гравиметре, включающее лазер, светоделитель, уголковый отражатель, закрепленный на свободнопадающем теле гравиметра, образующий рабочее плечо лазерного интерферометра, блок для определения величины и направления угла отклонения измерительного луча от вертикали, блок коррекции направления измерительного луча, отличающееся тем, что дополнительно содержит регистратор траектории смещения измерительного луча, отраженного закрепленным на падающем теле уголковым отражателем в процессе свободного падения тела, а блок для определения величины и направления угла отклонения измерительного луча от вертикали выполнен в виде анализатора траектории смещения измерительного луча, содержащего узел покадровой обработки видеозаписи траектории смещения измерительного луча, узел определения параметров смещения измерительного луча, узел выделения линейной и квадратичной составляющих смещения измерительного луча методом регрессионного анализа, узел определения отклонения измерительного луча от вертикали по функциональной зависимости смещения от угла отклонения измерительного луча от вертикали и узел формирования управляющих сигналов для блока коррекции направления измерительного луча, блок коррекции направления измерительного луча выполнен содержащим базовую площадку, на которой закреплен лазерный интерферометр, установленную на трех точечных опорах, одна из опор выполнена неподвижной, а две другие опоры выполнены перемещающимися под управлением сигналов, полученных с анализатора траектории смещения измерительного луча в вертикальной плоскости линейными актуаторами, выполненными в виде шагового двигателя с передачей винт-гайка, и направляющими, находящимися внутри корпуса.
4. Устройство по п.3, отличающееся тем, что регистратор траектории смещения измерительного луча выполнен в виде видеокамеры.
| US 20110046913 A1, 24.02.2011 | |||
| Прикаточное устройство к консольно- барабанным шинным конфекционным станкам | 1950 |
|
SU99194A1 |
| WO 2005076042 A1, 18.08.2005 | |||
| БАЛЛИСТИЧЕСКИЙ ЛАЗЕРНЫЙ ГРАВИМЕТР | 2001 |
|
RU2193786C1 |
| KR 2011131975 A, 07.12.2011. | |||

