Изобретение относится к области гравиметрии и может быть использовано для измерения абсолютных значений ускорения свободного падения в условиях подвижного объекта.
В настоящее время ускорение свободного падения (УСП) на подвижном основании измеряется относительным способом [1], недостатком которого является инерционность, так как относительные гравиметры построены на сильно демпфированной упругой механической системе. Это приводит к тому, что при измерениях УСП на движущемся объекте получают сглаженный профиль, без его детализации. При необходимости детальной картины уменьшают скорость движения объекта, что увеличивает время и стоимость съемки.
Известны симметричный [2], и асимметричный способы [3, 4] абсолютного измерения ускорения свободного падения. При симметричном способе пробное тело подбрасывается и опускается на место старта. Измеряются параметры восходящей и нисходящей ветвей траектории. Недостатком симметричного способа является необходимость броска пробного тела с ускорением, многократно превышающим ускорение силы тяжести. При этом возникают большие механические нагрузки и вибрация системы. При несимметричном способе тело без перегрузок поднимается в верхнее положение, отпускается, свободно падает, подхватывается в нижнем положении, а затем цикл повторяется. Измеряются параметры только нисходящей ветви траектории. Недостатком известных гравиметров [4] с ассиметричным способом измерения является использование для подхвата пробного тела внизу и подъема его наверх возвратно поступательного движения кареток в соответствующих направляющих, которые снижают жесткость конструкции и технологичность изготовления прибора за счет пар трения скольжения. Низкая технологичность приводит к существенному удорожанию изготовления прибора и препятствует его серийному применению. Кроме того возвратно поступательное движение ограничивает частоту бросков. Во время перемещения пробного тела в верхнее положение происходит нежелательный перерыв в измерениях.
Изобретение направлено на повышение технологичности конструкции и увеличение частоты измерений.
Эта цель достигается тем, каретки размещают на вращающемся кольце и поднимают по дуге окружности. На пробное тело устанавливают два уголковых отражателя симметрично на противоположных сторонах. Лазерные лучи направляют на пробное тело сверху и снизу. Обеспечивают измерение параметров общей траектории для двух падающих одновременно пробных тел. Кольцо баллистического блока вращают непрерывно.
Баллистический блок абсолютного гравиметра представляет собой кольцо с горизонтальной осью вращения, на котором закреплены одна или несколько пар диаметрально расположенных кареток. В каждой паре кареток размещено одно пробное тело. На пробном теле с противоположных сторон установлены два уголковых отражателя. На падающее тело сверху и снизу направлены лазерные лучи. При наличии нескольких пар кареток, в одной паре пробные тела размещаются в обеих каретках. На измеряемой траектории падения могут находиться одно или два пробных тела. Кольцо баллистического блока вращается дискретно или непрерывно.
Технический эффект заключается в исключении вертикальных поступательных перемещений кареток, увеличении частоты бросков за счет уменьшения, вплоть до исключения, времени холостого хода и обеспечения непрерывности измерений, что может быть полезным при измерении гравитационного поля на быстро движущемся объекте.
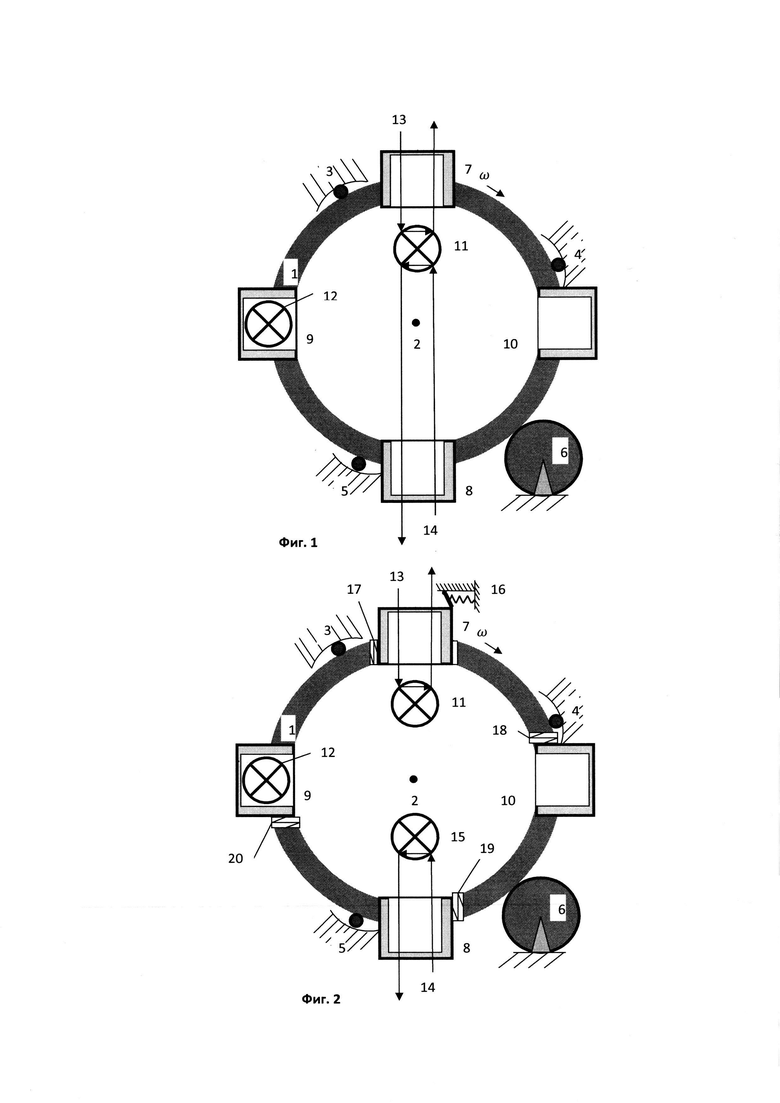
Устройство гравиметра приведено на Фиг. 1, 2.
На фигурах изображены: 1 - кольцо, 2 - ось вращения кольца, 3, 4, 5 - опоры, 6 - привод вращения кольца, 7, 8, 9, 10 - каретки, 11, 12 - первое и второе пробные тела, 13, 14 - лазерные лучи, 15 - третье пробное тело, 16 - тормоз, 17, 18, 19, 20 - зазоры с пружинами, ω - направление вращения кольца.
Кольцо 1 с горизонтальной осью вращения 2 установлено в опорах 3, 4, 5. Его вращение осуществляются приводом 6. На кольце попарно и диаметрально размещены каретки 7, 8 и 9, 10 открытые в сторону оси вращения. На фигурах 1 и 2 изображены две пары кареток. В одной из кареток каждой пары зафиксированы первое и второе пробные тела 11, 12 с двумя расположенными на противоположных сторонах тела уголковыми отражателями. Измерения производят двумя лазерными лучами 13, 14. Для обеспечения непрерывности измерений используют третье пробное тело 15, первоначально устанавливаемое в каретку 10. Если кольцо вращается без остановок, то каретки задерживаются тормозом 16, и остаются неподвижными за счет уменьшения величины зазоров 17, 18, 19, 20 и сжатия пружин.
На фиг. 1 кольцо 1 поворачивают по часовой стрелке вокруг оси 2 в подшипниках 3, 4, 5 с помощью привода 6. Поворот прекращают, когда одна из пар кареток, например 7, 8, устанавливается по вертикали. Другие каретки располагаются произвольно. Фиксирующее устройство верхней каретки отпускает пробное тело 11, и оно падает в нижнюю каретку, где крепится. В это время другое пробное тело 12 остается неподвижным. На фиг. 1 тело падает из каретки 7 в каретку 8. Во время падения измеряют ускорение свободного падения, используя лазерные лучи 14, 15, направленные сверху и снизу на два уголковых отражателя пробного тела. Кольцо поворачивают с помощью привода 6 и останавливают, когда следующая пара кареток расположится по вертикали. Измерения повторяются.
Для обеспечения непрерывности измерений (фиг. 2) в одну из пар кареток, например 9, 10, кладут пробные тела в обе каретки. В этом случае, когда каретки 9,10 встают в вертикаль из каретки 10 выпадает пробное тело 15. Пока оно летит, производят поворот так, что следующая пара 7, 8 установилась в вертикаль и пробное тело 11 начало падать. На фиг. 2 тело 11 падает из каретки 7 в каретку 10, тело 15 - из каретки 10 в каретку 8, а тело 12 - из каретки 9 в каретку 7. В результате в полете находятся два пробных тела, каждое из которых упадет в каретку последующей пары.
При непрерывном вращении кольца, кареткам обеспечивается сдвиг назад за счет зазоров 17-20. При упоре в тормоз 16 движение каретки останавливается, сдавливая соответствующие пружины. Пробное тело выпадает из каретки. Тормоз отпускается, и каретка пружиной возвращается в исходное положение на кольце. Так как масса каретки и ее момент инерции при вращении вокруг оси кольца как минимум в 10 раз меньше этих же характеристик всего кольца, то ее остановка будет сопровождаться меньшими перегрузками и вибрациями.
Расчеты проведем, исходя из параметров известного гравиметра [4]
Если принять высоту падения [4] h=34 мм, а время падения τ=0,083 с, то вместе со временем на поворот, отпускание и фиксацию один цикл измерений займет, предположим, τ1=0,15 с. Для схемы на фиг. 1 броски можно совершать с частотой  . Если измерять УСП по двум пробным телам, падающим одновременно (фиг. 2), то частоту бросков можно увеличить до f2=12 Гц с увеличением точности за счет увеличения количества измерений. Если считать один бросок - одно измерение, то при движении объекта со скоростью звука -
. Если измерять УСП по двум пробным телам, падающим одновременно (фиг. 2), то частоту бросков можно увеличить до f2=12 Гц с увеличением точности за счет увеличения количества измерений. Если считать один бросок - одно измерение, то при движении объекта со скоростью звука -  , ускорение свободного падения можно измерять через ΔS=25 м. Это дает возможность съемки детального гравитационного рельефа местности и точной навигации по рельефу, причем и то и другое делать на высоких скоростях движения объекта. Учитывая возможность [5] измерения УСП при прохождении пробным телом расстояния в длину волны света, можно увеличить дискретность измерений. Например, после отпускания в свободном падении первый участок в длину волны пробное тело пройдет за τ1=3*10-4 с, а последующие быстрее. В этом случае дискретность измерений сократится до ΔS1<0,1 м.
, ускорение свободного падения можно измерять через ΔS=25 м. Это дает возможность съемки детального гравитационного рельефа местности и точной навигации по рельефу, причем и то и другое делать на высоких скоростях движения объекта. Учитывая возможность [5] измерения УСП при прохождении пробным телом расстояния в длину волны света, можно увеличить дискретность измерений. Например, после отпускания в свободном падении первый участок в длину волны пробное тело пройдет за τ1=3*10-4 с, а последующие быстрее. В этом случае дискретность измерений сократится до ΔS1<0,1 м.
В случае непрерывного вращения останавливается только верхняя каретка. Пробное тело должно попасть в каретку следующей пары. В этом случае скорость вращения должна быть постоянной и зависеть от количества кареток n. Для примера с четырьмя каретками n=4 время поворота на четверть оборота должно быть равно времени падения тела
Угловая скорость вращения и линейная скорость на кольце в этом случае равны

Если принять зазоры 17, 18, 19, 20 величиной l=0,005 м, то перегрузка при остановке каретки составляет незначительную величину  При остановке каретки, а не всего кольца, значительно уменьшаются механические нагрузки и вибрации, так как плавно тормозится сравнительно небольшой элемент гравиметра - каретка.
При остановке каретки, а не всего кольца, значительно уменьшаются механические нагрузки и вибрации, так как плавно тормозится сравнительно небольшой элемент гравиметра - каретка.
Используя безинерционность абсолютных измерений, можно измерять профиль или ориентироваться по профилю изменения силы тяжести при больших скоростях движения объекта.
Литература
1. Устройство и способ измерения силы тяжести. Пат. RU 21984140 2002..03.14. Рос. Федерация: МПК G01С; заявитель и патентообладатель ФГУП "Центральный научно-исследовательский институт "Электроприбор".
2. Germak A., Desogus S., Origlia С. Interferometer for the IMGC rise-and-fail gravimeter. Metrologia, 2002,vol. 39 n. 5, pp 471-475.
3. Витукшкин Л.Ф., Орлов О.А. Абсолютный баллистический гравиметр. Пат. РФ №2475786 от 06.05.2011.
4. Vitouchkine A.L., Faller J.E. Measurement results with a small cam-driven absolute gravimeter, Metrologia, 2002, vol. 39, n. 2, p. 465-469.
5. Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления. Пат. RU 2523108 2013 02 28 Рос. Федерация: МПК G01С; заявитель и патентообладатель Попов А.Б
Изобретение относится к области гравиметрии и может быть использовано для измерения абсолютных значений ускорения свободного падения на движущихся объектах. Сущность: гравиметр содержит одно или два пробных тела, имеющих по два уголковых отражателя, и баллистический блок. Баллистический блок представляет собой вращающееся вокруг горизонтальной оси кольцо, на котором закреплены одна или несколько пар диаметрально расположенных кареток с функциями опускания и подхвата пробных тел. Причем баллистический блок выполнен с возможностью обеспечения падения по измеряемой траектории одного или одновременно двух пробных тел и подхвата их в нижнем положении кареткой той же или последующей пары. Технический результат: исключение вертикальных поступательных перемещений кареток, увеличение частоты бросков за счет уменьшения времени холостого хода, обеспечение непрерывности измерений. 2 н.п. ф-лы, 2 ил.
1. Асимметричный способ измерения абсолютного ускорения свободного падения, состоящий в том, что каретки с пробным телом перемещают в верхнее положение, отпускают пробное тело, измеряют параметры траектории его падения и подхватывают в нижнем положении, отличающийся тем, что на противоположных сторонах пробного тела устанавливают два уголковых отражателя, одну или несколько пар кареток размещают на кольце с горизонтальной осью вращения, тело по окружности перемещают в верхнее положение, затем отпускают из верхней каретки одной из пар, измеряют параметры траектории падения одного или общей траектории двух пробных тел, а в нижнем положении тело подхватывают в каретку той же или последующей пары.
2. Абсолютный гравиметр, содержащий падающее по измеряемой траектории пробное тело и баллистический блок с кареткой для подъема в верхнее положение пробного тела, отпускания его и подхвата в нижнем положении, отличающийся тем, что пробное тело выполнено с двумя уголковыми отражателями, расположенными с противоположных сторон тела, баллистический блок представляет собой вращающееся вокруг горизонтальной оси кольцо, на котором закреплены одна или несколько пар диаметрально расположенных кареток с функциями отпускания и подхвата пробных тел каждая, причем баллистический блок выполнен с возможностью обеспечения падения по измеряемой траектории одного или одновременно двух пробных тел и подхвата их в нижнем положении кареткой той же или последующей пары.
| АБСОЛЮТНЫЙ БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР | 2011 |
|
RU2475786C2 |
| СПОСОБ ИЗМЕРЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ И ГРАВИМЕТРЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523108C1 |
| Прикаточное устройство к консольно- барабанным шинным конфекционным станкам | 1950 |
|
SU99194A1 |

