Изобретение относится к радиотехнике, предназначено для измерения абсолютного времени распространения KB радиосигналов и может использоваться в радиолокации и в системах навигации.
Известен способ измерения времени распространения KB сигналов с синхронизацией по GPS [1]. Также известен способ измерения абсолютного времени распространения при помощи ЛЧМ сигналов [2].
Однако в известных способах измерения или недостаточна точность измерения абсолютного времени распространения в ионосферных каналах связи в KB диапазоне, или требуются специальные радиоприемники GPS.
Предлагаемый способ позволяет проводить измерения абсолютного времени распространения KB радиосигналов при помощи радиокомплекса с линейно-частотно-модулированным (ЛЧМ) сигналом.
Технический результат - повышение точности измерения абсолютного времени распространения KB радиосигналов - достигается тем, что предложен новый способ измерения, состоящий из пяти этапов, заключающихся в том, что на первом этапе - зондировании ионосферы непрерывным ЛЧМ сигналом - предварительно определяют модовую структуру ионосферного KB канала, проводят привязку шкал времени разнесенных пунктов по сигналам точного времени с точностью до нескольких миллисекунд и осуществляют зондирование ионосферы во всем диапазоне ЛЧМ радиокомплекса от 3 до 30 МГц; на втором этапе - синхронизации - переходят в режим излучения/приема на скользящей частоте со скоростью dƒ/dt=100 кГц/с в интервале частот от ƒH до ƒK=ƒH+100 кГЦ с периодом повторения ΔT=1 с; затем в ЛЧМ приемнике на другом конце радиолинии путем регулировки момента запуска гетеродина ЛЧМ приемника устанавливают разностную частоту на выходе ЛЧМ приемника F2=0; на третьем этапе - режиме измерения - включают ЛЧМ передатчик на противоположном конце линии и, полагая трассы обратимыми, через время tгр принимают радиосигнал первым ЛЧМ приемником, который будет иметь разностную частоту F1=2tгр(dƒ/dt), а затем определяют время группового распространения:
tгр=F1/2(dƒ/dt),
где tгр - время группового распространения KB радиосигнала;
dƒ/dt - скорость изменения частоты ЛЧМ сигнала; причем новым является то, что вводятся еще два этапа: синхронизации и измерения: на четвертом этапе - режиме синхронизации - включают первый ЛЧМ передатчик при скорости изменения частоты ƒ2 '=200 кГц/с, а на противоположном конце линии во втором ЛЧМ приемнике устанавливают разностную частоту F2=0; на пятом этапе - режиме измерения - производят излучение со второго ЛЧМ передатчика при скорости изменения частоты ƒ2 '=200 кГц/с и принимают разностный сигнал на противоположном ЛЧМ приемнике, разностная частота на выходе которого будет пропорциональна времени группового запаздывания tгр2.
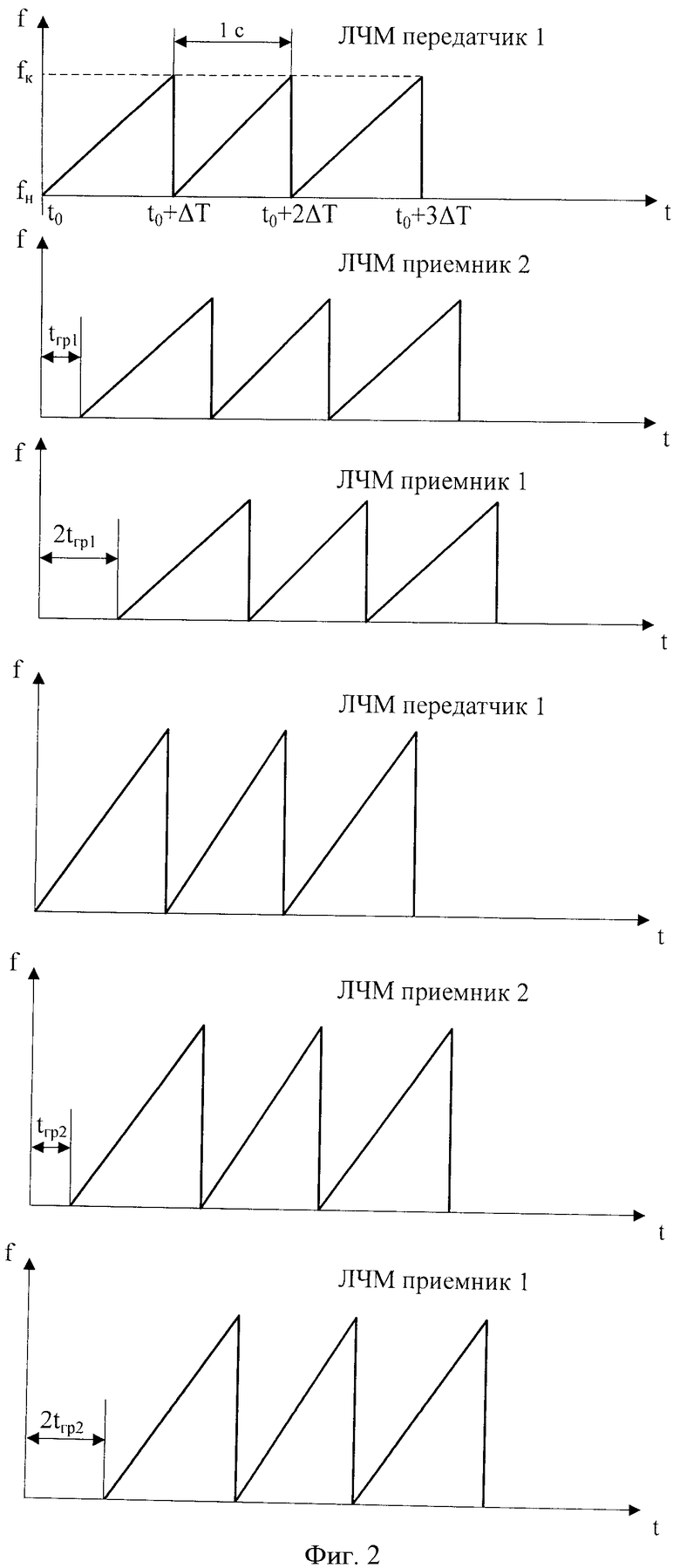
На фиг.1 приведена структурная схема радиокомплекса с непрерывным ЛЧМ сигналом, а на фиг.2 - временные диаграммы изменения частоты ЛЧМ передатчиков и ЛЧМ приемников.
Радиокомплекс содержит первый и второй эталонные генераторы, первый и второй ЛЧМ синтезаторы, первое и второе радиопередающие устройства, первое и второе радиоприемные устройства. Измерения проводятся следующим образом.
Предварительно, чтобы определить модовую структуру ионосферного КБ канала и провести привязку шкал времени разнесенных пунктов по сигналам точного времени с точностью несколько миллисекунд, осуществляется зондирование ионосферы во всем диапазоне ЛЧМ радиокомплекса (3-30 МГц).
Далее по согласованной программе переходят в режим излучения/приема на скользящей частоте со скоростью 100 кГц/с в более узком интервале частот от ƒH до ƒK=ƒH+100 кГц, т.е. осуществляется режим «пилы» с периодом повторения Δ=1 с. Его можно назвать режимом синхронизации. Частота ƒH лежит в интервале частот прохождения и может изменяться по согласованной программе в процессе измерений.
В момент времени t0 в пункте 1 стартует передатчик 1. Приемник 2 на другом конце радиолинии стартует в момент времени t0+Δtрасс, где Δtрасс - время рассогласования шкал времени передатчика 1 и приемника 2.
Тогда разностная частота для приемника 2 будет пропорциональна:
F2=(dƒ/dt)ΔtИЗМ,
где ΔtИЗМ=tгр-Δtрасс,
tгр - время группового распространения от передатчика 1 до приемника 2. Путем изменения Δtрасс мы должны получить разностную частоту во втором ЛЧМ приемнике F2=0.
При этом ΔtИЗМ=tгр-Δtш=0 и tгр=Δtш (скорректированное).
В скобках стоит скорректированное время рассогласования Δtш.
Коррекция проводится в течение нескольких циклов излучения (каждый длительностью 1 с), в течение которых проводится измерение разностной частоты и осуществляется коррекция Δtрасс, чтобы обеспечить F2=0 (всего на измерение F2 и коррекцию Δtш затрачивается не более 30 сек). Эта процедура не влияет на измерение абсолютного времени распространения KB сигналов в ионосфере, поскольку время распространения заведомо не превышает периода повторения интервала излучения, равного 1 секунде.
На следующем этапе в момент времени t0+Δtш=t0+tгр, стартует передатчик 2. Полагая трассы обратимыми, через время tгр радиосигнал принимается приемником 1. При этом его разностная частота F1 будет равна:
F1=2tгр(dƒ/dt).
Таким образом, измеряем время группового распространения:
tгр=F1/2{dƒ/dt).
Разрешающую способность способа измерения можно оценить по формуле:
Δtгр=F1/(dƒ/dt).
При скорости изменения частоты dƒ/dt=200 кГц/с (скорость изменения частоты современных ЛЧМ ионозондов) и точности измерения частоты до 0,1 Гц точность измерения может достигать до 0,5 мкс.
К достоинствам предлагаемого способа можно отнести то, что отпадает необходимость в дорогостоящей аппаратуре GPS навигации, а также данный способ позволяет проводить измерения независимо от надежности спутниковой системы GPS или ГЛОНАСС.
Литература
1. www.gpsworid.com/gpsworld.
2. Патент №2228496 Российской Федерации МПК Н03В 23/00. Способ измерения абсолютного времени распространения KB радиосигналов при помощи сигналов с линейно-частотной модуляцией. / Рябов И.В., Урядов В.П. Заявл. 06.04.2005 Опубл. 20.06.2006. Бюл. №14. 5 с.
Изобретение относится к радиотехнике и может использоваться в радиолокации и в системах навигации. Техническим результатом является обеспечение возможности измерения времени распространения KB радиосигналов. Для этого с помощью радиосигналов с линейно-частотной модуляцией определяют модовую структуру ионосферного KB канала и проводят привязку шкал времени разнесенных пунктов по сигналам точного времени с точностью до нескольких миллисекунд, осуществляют зондирование ионосферы во всем диапазоне ЛЧМ радиокомплекса (3-30 МГц). По согласованной программе переходят в режим излучения/приема на скользящей частоте со скоростью 100 кГц/с в более узком интервале частот, т.е. осуществляется режим «пилы» с периодом повторения ΔТ=1 с. Его можно назвать режимом синхронизации. Частота fH лежит в интервале частот прохождения и может изменяться по согласованной программе в процессе измерений. В момент времени t0 стартует передатчик, приемник на другом конце радиолинии стартует через время рассогласования шкал времени указанных передатчика и приемника. Коррекция времени рассогласования проводится в течение нескольких циклов излучения, в течение которых проводится измерение разностной частоты и осуществляется коррекция. 2 ил.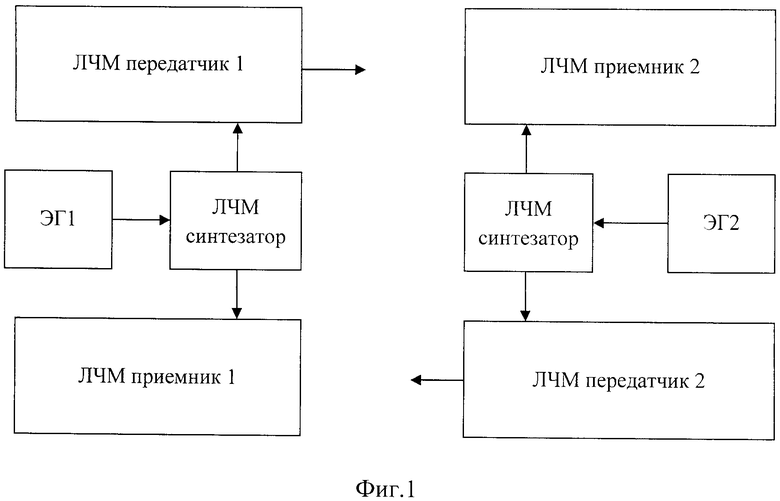
Многочастотный способ измерения времени группового запаздывания радиосигналов с линейной частотной модуляцией, состоящий из трех этапов, заключающихся в том, что на первом этапе - зондировании ионосферы непрерывным ЛЧМ сигналом - предварительно определяют модовую структуру ионосферного KB канала и проводят привязку шкал времени разнесенных пунктов по сигналам точного времени с точностью до нескольких миллисекунд и осуществляют зондирование ионосферы во всем диапазоне ЛЧМ радиокомплекса от 3 до 30 МГц, на втором этапе - синхронизации - переходят в режим излучения/приема на скользящей частоте со скоростью df/dt=100 кГц/с в интервале частот от fH до fK=fH+100 кГц с периодом повторения ΔТ=1 с, затем в ЛЧМ приемнике на другом конце радиолинии путем регулировки момента запуска гетеродина ЛЧМ приемника устанавливают разностную частоту на выходе ЛЧМ F2=0, на третьем этапе - режиме измерения - включают ЛЧМ передатчик на противоположном конце линии и, полагая трассы обратимыми, через время tгр принимают радиосигнал первым ЛЧМ приемником, который будет иметь разностную частоту F1=2tгр(df/dt), а затем определяют время группового распространения tгр=F1/2(df/dt), где tгр - время группового распространения KB радиосигнала;
df/dt - скорость изменения частоты ЛЧМ сигнала;
fH - начальная частота излучения;
fK - конечная частота излучения;
отличающийся тем, что вводятся еще два этапа: измерения и синхронизации: на четвертом этапе включают первый ЛЧМ передатчик при скорости изменения частоты df2/dt=200 кГц/с, а на противоположном конце линии во втором ЛЧМ приемнике устанавливают разностную частоту F2=0, на пятом этапе производят излучение со второго ЛЧМ передатчика при скорости изменения частоты df2/dt=200 кГц/с и принимают разностный сигнал в противоположном ЛЧМ приемнике, разностная частота на выходе которого будет пропорциональна времени группового запаздывания tгр2.
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО ВРЕМЕНИ РАСПРОСТРАНЕНИЯ КОРОТКИХ РАДИОВОЛН В ИОНОСФЕРЕ С ПОМОЩЬЮ РАДИОСИГНАЛОВ С ЛИНЕЙНО-ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2005 |
|
RU2282881C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОЙ СРЕДЫ | 2002 |
|
RU2218559C1 |
| US 4501502 A, 26.02.1985 | |||
| ПОЛЫЙ СВЕТОВОД СИСТЕМЫ ЕСТЕСТВЕННОГО ОСВЕЩЕНИЯ ПОМЕЩЕНИЯ | 2022 |
|
RU2802714C1 |

