Изобретение относится к области ионосферной радиосвязи и предназначается для определения максимально применимой частоты, знание которой необходимо для осуществления надежной и достоверной радиосвязи в заданное время на дальние расстояния. Техническая реализация изобретения может использоваться на приемо-передающих центрах, радиостанциях коротковолновой профессиональной связи, при передаче цифровых данных и программ регионального и зарубежного радиовещания в коротковолновом диапазоне частот, а также для автоматического управления сеансами ионосферной радиосвязи при построении адаптивных радиосистем различного назначения, в том числе систем автоматического экстренного оповещения.
Изобретение применимо в стационарных и мобильных коротковолновых (КВ) передатчиках, когда необходима периодическая смена рабочих частот в течение суток или когда время работы КВ передатчиков априорно неизвестно, и они могут включаться и выключаться автоматически по заданному алгоритму в любое время текущих суток для передачи информации.
Работа средств радиосвязи и радиовещания КВ диапазона во многом зависит от рефракционных свойств ионосферы на траектории распространения радиосигнала. Состояние ионосферы, как электрически заряженной среды, зависит от многих факторов естественного и антропогенного характера. Основное влияние на состояние ионосферы вносит ее электронная концентрация, которая постоянно меняется в зависимости от времени (часа суток, сезона, фазы цикла солнечной активности), географических координат, высоты над уровнем моря, от солнечной активности. Их суточные вариации могут приводить как к ухудшению качества радиосвязи и радиовещания в КВ диапазоне, так и полному ее исчезновению для постоянно выбранной несущей частоты радиопередатчика.
Преимуществом работы в КВ диапазоне по сравнению с работой на более длинных волнах является то, что в этом диапазоне можно создать направленные антенны. Волны в КВ диапазоне распространяются на дальние расстояния путем однократного или многократного отражения от ионосферы и поверхности Земли. Поэтому системы КВ связи могут обеспечивать направленную передачу информации на сравнительно большие расстояния (единицы и десятки тысяч километров).
Способ распространения радиоволн путем их отражения от ионосферы называют скачковым и характеризуют расстоянием скачка, числом скачков, углами выхода и прихода, а также максимально применимой частотой (МПЧ) и наименьшей применимой частотой (НПЧ). МПЧ это частота, при которой еще отражаются радиоволны, посланные антенной радиопередатчика в направлении на горизонт. На частотах выше МПЧ слой вообще перестает отражать радиоволны, посланные с поверхности Земли, и они уходят сквозь ионосферу в космос. Радиосвязь в КВ диапазоне длин волн играет важную роль как средство внутренней, зоновой, подвижной и производственно-диспетчерской связи общего, ведомственного и специального пользования и назначения, а также широко используется для профессиональной и любительской радиосвязи.
Для определения МПЧ известны различные методы и варианты радиозондирования. Здесь следует выделить вертикальное, наклонное, возвратно-наклонное зондирование с различными видами модуляции сигналов, которые могут быть узкополосными или широкополосными. В последние десятилетия, данные о состоянии и волновых процессах в ионосфере, удается получать и с использованием глобальной спутниковой сети типа GPS/ГЛОНАСС.
Высокую точность в определение МПЧ имеет метод трассового (наклонного) зондирования. Передатчик и приемник сигналов разносятся на расстояние одного или нескольких скачков. В заранее установленное время или с каким-то периодом времени радиопередатчик посылает последовательно в эфир радиосигнал на нескольких частотах КВ диапазона. На приемном конце оценивается слышимость и качество сигналов и делается вывод о подходящих частотах для данного времени суток и месяца. Накопленная статистика затем используется для организации радиосвязи. В данном случае точность определения МПЧ будет определяться шагом перестройки излучаемой частоты передатчиком. Заслуживает внимание для целей определения МПЧ использование сети КВ радиовещательных станций, для каждой из которых известны - ее местоположение, частота несущей радиопередатчика и направление вещания.
Суть известных активных способов определения МПЧ заключается в том, что на передающей стороне последовательно (параллельно) излучают радиосигнал на различных частотах КВ диапазона, а на приемной стороне принимают этот радиосигнал на каждой из частот, обрабатывают и регистрируют. При этом за МПЧ принимается либо та частота зондирования, на которой был зафиксирован наибольший уровень принимаемого сигнала, либо наибольшая по номиналу частота, сигнал на которой был принят в точке приема.
В ходе вертикального зондирования (ВЗ) радиоволны передатчика, находящегося в определенном месте, излучаются вверх и затем отражаются от ионосферы. Зная скорость их распространения, равную скорости света, и время от момента передачи до момента приема, можно определить высоту отражающего слоя. Вертикальные ионозонды определяют состояние ионосферы непосредственно над пунктом расположения передающей радиостанции. Позволяя получать зависимость распределения электронной концентрации от высоты, они не очень хорошо подходят для исследований динамических процессов в ионосфере, а их применение является достаточно затратным из-за необходимости обеспечения работы радиопередающих и приемных систем. В случае возвратно-наклонного зондирования (ВНЗ) используется эффект, характеризующий отражение радиоволны от Земли в обратном направлении, так называемое "эхо".
На практике зачастую перед сеансом нет возможности проводить процедуру зондирования по соображениям дефицита времени или иным причинам. Кроме того, для проведения ВЗ и ВНЗ помимо наличия передатчика и приемной антенны с заданной диаграммой направленности требуются высокая точность определения времени между моментами передачи и приема радиоимпульсов, а также синхронизация работы передающих и приемных комплексов, что является основным их недостатком.
Известны принципы дистанционного зондирования и мониторинга состояния ионосферы, определения рабочих частот для ионосферной радиосвязи [1-4].
Рассмотрим отдельные патенты и технические решения, которые по совокупности операций и действий над сигналами наиболее полно отражают существо задачи по определению МПЧ для ионосферной радиосвязи. Для зондирования ионосферы могут использоваться собственные радиоволны частот КВ диапазона или радиоволны с частотой значительно выше КВ диапазона. Условно процесс зондирования ионосферы может быть разделен на активный и пассивный способы, с точки зрения возможности приема таких радиосигналов типовым приемником КВ диапазона.
Рассмотрим активные способы зондирование ионосферы. Так, например, известен патент РФ 94028469 от 20.05.1996 года на устройство определения максимальной применимой частоты для КВ радиолинии [5]. Изобретение относится к системам радиосвязи, в частности к системам, обеспечивающим определение частотного диапазона прохождения радиосигналов в КВ диапазоне, т.е. определения максимально и наименьших применимых частот. Суть зондирования заключается в последовательном излучении радиопередающим устройством наклонных зондирующих сигналов на группе частот КВ диапазона, их приеме с последующей обработкой и регистрацией. При этом, по результатам обработки, за МПЧ принимается либо частота зондирования, на которой был зафиксирован максимальный уровень принятого сигнала, либо наибольшая по номиналу частота, сигнал на которой был принят в точке приема, либо частота, уровень сигнала на которой аналитически связан с максимальным уровнем принятого сигнала. Недостаток - потеря значительного времени на проведение зондирования ионосферы во всем частотном диапазоне, за счет увеличения числа необходимых измерений для достижения заданной точности измерений.
Известен патент РФ 2154910 от 20.08.2000 года на систему автоматического управления коротковолновой связью [6]. Предложена система автоматического управления коротковолновой связью как в автономный от канальной аппаратуры комплекс средств связи, на основе ЭВМ, предназначенный для управления коротковолновой связью. Используя всего 9 фиксированных частот для тестирования КВ диапазона, комплекс адаптирует работу канальной аппаратуры к суточной динамике ионосферы и радиопомехам. В результате аппаратура всегда работает на оптимальных частотах. Используя свойство инерционности ионосферы, и контролируя динамику сигналов корреспондента на оптимальной рабочей частоте (ОРЧ), комплекс прогнозирует время возникновения постоянных отказов и заблаговременно, еще до возникновения отказа, перестраивает средства связи обеих корреспондентов на новые оптимальные частоты. Недостаток системы - необходимость передачи тестирующих (зондирующих) радиосигналов, излучаемых на 9 частотах КВ диапазона, через небольшие промежутки времени, что постоянно создает определенные радиопомехи другим радиостанциям.
Известен патент РФ 2307463 от 27.09.2007 года на способ выбора рабочих частот для радиолиний ионосферных волн [7]. Достигаемым техническим результатом изобретения является разработка способа выбора рабочих частот для радиолиний ионосферных волн, обеспечивающего повышение достоверности определения пригодности радиочастот. Выбор рабочих частот осуществляют по условиям пригодности частот в результате отражения от ионосферы и сигнально-помеховой обстановки.
Недостатком способа является учет условия, при котором соотношения напряженности сигнала и помехи меньше минимально допустимого отношения уровня сигнал/помеха а также, когда текущая вероятность ошибки приема меньше предварительно заданной максимально допустимой вероятностью ошибки.
Мониторинг ионосферы с использованием навигационных спутников GPS/ГЛОНАСС излучающих радиоволны, которые проходят через ионосферу, обеспечивает возможность определения пространственного распределения параметров ионосферы. Использование этих параметров позволяет в принципе осуществить возможность прогнозирования МПЧ с целью эффективного планирования и проведения сеансов КВ связи.
В патенте РФ 2181490 от 20.04.2002 на устройство и способ спутникового радиоопределения [8] используются спутники глобальной навигационной службы, как, например, спутники системы GPS, которые формируют дальномерные сигналы, геостационарные спутники, которые ретранслируют дальномерные сигналы, сформированные в навигационной земной станции, содержащие вспомогательную информацию А, а также среднеорбитальные спутники, которые формируют дальномерные сигналы, содержащие региональную вспомогательную информацию RA, передаваемую из узла доступа к спутникам. Приемник оценивает значения ионосферных задержек для дальномерных сигналов, передаваемых на одной частоте.
Наземный приемник системы GPS/ГЛОНАСС обеспечивает получение сигналов с нескольких навигационных спутников. Созвездие спутников организовано таким образом, что почти в каждой точке на поверхности Земли и почти постоянно на протяжении суток одновременно в зоне радиовидимости находится не менее четырех спутников. Фиксируя разности времен прихода сигналов от различных спутников, для чего используется принятое бортовое время, и с учетом координат спутников (передаваемых с борта), приемники спутниковых систем вычисляют относительные дальности до каждого спутника, а затем на основе полученных четырех относительных дальностей вычисляет свое местоположение по трем координатам и калибрует местные часы. Колебания в запаздывании сигналов, обусловленные изменением состояния ионосферы, могут снизить точность радиоопределения, и, соответственно, для компенсации этого нежелательного эффекта с каждого спутника сигналы передаются на двух частотах. Основной недостаток способа - необходимость совместного использования разнородных групп спутников, включающих навигационные, геостационарные и среднеорбитальные спутники, что приводит к снижению надежности работы устройства.
Известен патент РФ 1840572 от 20.08.2007 года на фазовый способ измерения интегральной электронной концентрации в ионосфере [9]. Изобретение относится к способам измерений в радиолокации и может быть использовано для исключения ионосферных ошибок в РЛС. В нем осуществляют одновременное измерение разности фазовых задержек сигналов на двух парах частот, имеющих одинаковый разнос. По разности полученных разностей фазовых задержек определяют интегральную электронную концентрацию в ионосфере.
Известен патент на способ определения параметров ионосферы и устройство для его осуществления. Это патент РФ 2421753 от 20.06.2011 года с использованием сигналов от навигационных спутников [10]. Сущность изобретения следующая. Вначале принимают радиосигналы от навигационных спутников на двух когерентных частотах F1 и F2. Затем определяют по принятым радиосигналам псевдодальности DF1 и DF2 до навигационного спутника. По ним находят разности псевдодальностей D12. Определяют полную электронную концентрацию Le вдоль трассы «спутник - наземный пункт». Определяют в области измерения высотного профиля электронной концентрации ионосферы N(z). Измеряют значения фаз F1 и F2 принятых радиосигналов. Определяют разности псевдодальностей D12 с учетом значений фаз F1 и F2 принятых радиосигналов. Применяют итерационную процедуру решения обратной задачи, основанную на использовании метода сопряженных градиентов и априорной информации о фоновом состоянии ионосферы для определения в области измерения высотного профиля электронной концентрации ионосферы N(z).
На основе получаемых значений электронной концентрации ионосферы по данному способу, в дальнейшем может быть определено значение МПЧ. Устройство снабжено блоком обработки и отображения, вход которого подключен к выходу двухчастотного приемника. При этом блок обработки и отображения выполнен с возможностью определения вышеуказанных параметров.
В данном способе в качестве априорной информации о фоновом состоянии ионосферы (в качестве нулевого приближения решения задачи) используется долгосрочный прогноз ионосферы, основанный на какой-либо модели ионосферы, например IRI-2007 (International Reference Ionosphere).
Недостатком рассмотренного способа является необходимость использования априорной информации о фоновом состоянии ионосферы для определения в области измерения высотного профиля электронной концентрации ионосферы N(z). Однако этот способ обладают еще одним существенным недостатком - измеренные значения полной электронной концентрации (total electron content - ТЕС) определены с точностью до произвольной константы, что приводит к невозможности однозначной интерпретации измерений. Для проведения двухчастотных измерений требуется сложная процедура калибровки измерительной аппаратуры и стабильный температурный режим, для неизменности калибровочных коэффициентов.
Точный расчет калибровочных коэффициентов является трудоемкой задачей, но без использования этих коэффициентов, невозможно получить величины ТЕС, имеющие физический смысл (при использовании неверной калибровки, как правило, получаемые значения ТЕС либо отрицательны, либо превышают физически возможные максимальные значения).
Следует отметить, что для решения задач персональной навигации широкое распространение получили приемники ГНСС, производящие измерения только лишь псевдодальностей на единственной частоте. Разработка алгоритма обработки этих измерений позволит отказаться от необходимости использования дорогостоящих точных двухчастотных приемных станций ГНСС и проведения калибровки этих станций. Замена дорогостоящей высокоточной аппаратуры «бытовыми» приборами откроет возможности для быстрого развертывания сети измерительных навигационных приемников.
Одночастотная аппаратура гражданского назначения работает только по сигналам GPS/ГЛОНАСС поддиапазона L1 и в ней отсутствует возможность исключения ионосферных погрешностей измерений с помощью работы по двум частотам. Двухчастотная GPS, доступная гражданским потребителям, может быть в любое время отключена от второй частоты путем смены Р-кода на Y-код на второй частоте (режим «Anti-Spoofing»), Одночастотная GPS/ГЛОНАСС гражданского назначения в настоящее время получила наибольшее распространение, по сравнению с двухчастотной.
Известен патент РФ 2208809 от 20.07.2003 года на способ одночастотного определения задержки сигналов навигационной спутниковой системы в ионосфере [11]. Изобретение относится к области спутниковой навигации и может быть использовано для определения ионосферной задержки распространения сигналов от навигационных спутников с помощью навигационной аппаратуры потребителей глобальной навигационной спутниковой системы, работающей на одной частоте. В предлагаемом способе определение задержки сигналов в ионосфере производится путем решения системы уравнений, составленной по разностям приращений псевдодальностей, измеренных по дальномерному коду и по фазе несущей частоты для каждого навигационного спутника. Недостаток способа заключается в том, что необходимо дополнительно определять приращения псевдодальностей за время между текущим и предыдущим измерениями, затем определять разности приращений псевдодальностей, которые могут иметь незначительную величину, что приводит к ухудшению точности измерений.
При использовании одночастотных навигационных приемников (НП) типа GPS/ГЛОНАСС ионосферная задержка радиосигналов, излучаемых со спутников, является наибольшим источником погрешности измерений псевдодальностей и существенным образом оказывает влияние на погрешность определения координат и времени.
Технический результат - обеспечение по данным одночастотных НП типа GPS/ГЛОНАСС формирование управляющих сигналов для нахождения значений максимально применимой частоты ионосферной радиосвязи и упрощение способа ее определения.
Технический результат достигается тем, что в отличие от известного способа одночастотного определения задержки сигналов навигационных спутниковых систем в ионосфере [11], включающего передачу радиосигналов на заданных частотах от навигационных спутников типа GPS/ГЛОНАСС на Землю, прием радиосигналов, прошедших дистанционную среду "спутник-Земля" на приемной стороне одночастотным навигационным приемником, стандартную обработку принятых радиосигналов для определения координат местоположения (xi,yi) одночастотного навигационного приемника, а также отображение результатов вычисления, согласно изобретению, полученные посредством одночастного навигационного приемника координаты местонахождения этого навигационного приемника (xi,yi) сравнивают с заранее сформированными на основе априорной геодезической съемки координатами местонахождения навигационного приемника, (х0,y0), и получают разностные величины координат навигационного приемника Δxi и Δyi, далее образуют нормирующие коэффициенты S1 и S2 которые равны величинам:
S1=Δxi/Δxmax и
S2=Δyi/Δymax,
где Δxi и Δyi - текущая ошибка определения координат навигационного приемника, Δxmax и Δymax - задаваемое максимально возможное значение ошибки при определении координат местонахождения навигационного приемника, при этом величины текущей ошибки принимают значения 0≤Δxi≤Δxmax и 0≤Δyi≤ymax;
на основе значений величин S1 и S2 формируют обобщенный нормирующий коэффициент S, значение которого определяется исходя из условия:
затем осуществляют вычисление значение критической частоты КВ диапазона fкp согласно выражению:
fкр=(fmin+S·Δf);
где fmin - минимальная частота КВ диапазона,
Δf - полоса частот КВ диапазона (Δf=fmax-fmin),
fmax - максимальная частота КВ диапазона;
максимально применимая частота fмпч определяется на основе выражения:
fмпч=fкp·secφ0=(fmin+S·Δf)·secφ0,
где φ0=π/2-θ0 - угол падения радиолуча на ионосферу;
коэффициент, значение оптимальной рабочей частоты fорч радиоприемника и радиопередатчика КВ диапазона определяют из значений максимально применимой частоты КВ диапазона согласно выражению:
fорч=0,9·fмпч.
Способ может реализовываться так, что на основе оптимальной рабочей частоты fорч формируют цифровой сигнал управления, представленный в последовательном двоичном коде, разрядность которого определяется максимально возможным числом организуемых частотных каналов n для ионосферной радиосвязи КВ диапазона из выражения:
n=(fмпч-fнпч)/Δf0, где fнпч - наименьшая применимая частота,
Δf0 - полоса частот, которую занимает один канал радиопередачи,
n≤2m, m - число разрядов цифрового сигнала управления,
m=1,2,3, …, Z.
Способ может быть реализован так, что при наличии изменения максимально применимой частоты fмпч через определенные интервалы времени Δti, за счет ее увеличения или уменьшения, относительно первоначального исходного ее значения на моменты времени t1, t2, … tn, которые характеризуют начало проведения сеансов радиосвязи на новых оптимальных рабочих частотах в КВ диапазоне для автоматического переключения несущей частоты радиопередатчика и радиоприемника осуществляют формирование цифрового управляющего сигнала на другую новую оптимальную рабочую частоту.
Использование существующих одночастотных НП типа GPS/ГЛОНАСС и формируемых ими сигналов позволяет оперативно, относительно просто и без больших затрат, наряду с выполнением целевой задачи определения координат местонахождения объекта (приемника) определять значение максимально применимой частоты, причем непрерывно, поскольку группа навигационных КА достаточное время будет находиться в зоне видимости НП. За счет низкой стоимости одночастотных НП типа GPS/ГЛОНАСС можно организовывать большое число приемных пунктов (что важно для протяженной территории РФ), одновременно работающих по нескольким направлениям (радиотрассам) вместо одного, как при использовании аппаратуры вертикального, наклонного, возвратно-наклонного или трансионосферного зондирования.
Технический результат достигается за счет исключения в известных способах операций, включающих косвенное определение электронной плотности или задержки радиосигналов в ионосфере для их последующего использования для нахождения МПЧ. В данном способе вводится новая конкретная операция, включающая определение расхождения в измерении параметров текущих координат одночастотным НП типа GPS/ГЛОНАСС по сравнению с заранее известными априорными данными о координатах местоположения НП, значение которых служат исходным эталоном для проведения сопоставительной оценки данных измерений.
Такой подход приводит к обеспечению необходимой калибровки для отсчета сигналов и привязки результатов измерений, что в явном виде отсутствует в известных способах, далее обеспечивает упрощение способа оценки МПЧ, позволяет достичь необходимой точности при высоком быстродействии обеспечения измерения данных. При этом достигается объективный учет суточных и сезонных вариаций состояния ионосферы, проявляющихся в реальном изменении задержки радиосигналов навигационных спутников.
Предлагаемый способ определения МПЧ базируется на следующих положениях. Из теории распространения радиоволн известно, что ионизированные слои полностью характеризуются высотой максимума электронной концентрации h и критической частотой fкp - максимальной частотой отражающейся волны при вертикальном зондировании. Критическая частота зависит только от электронной концентрации в ионосферном слое и определяется в виде:

где Ne - число электронов в 1 м3 (fкр определяется в Гц) или если число электронов в 1 см3 (fкр определяется в кГц). Так, например, если в летний полдень концентрация электронов в слое Е достигла 1012 электронов/м3, то fkp≈9·106 Гц или 9 МГц.
При увеличении частоты сигнала, вертикально падающие волны перестают отражаться, но полого падающие волны еще отражаются. При этом вокруг радиопередатчика образуется «мертвая зона», в которой сигнал не слышен. На больших же расстояниях сигнал может быть достаточно сильным.
Поскольку коэффициент преломления ионосферы зависит от частоты, то частота радиоволн fмпч, испытывающей полное внутреннее отражение на высоте h при значении угла возвышения θ0 может быть определена из выражения

где Ne - электронная концентрация в точке поворота, fкр - критическая (собственная) частота ионосферы, φ0=π/2-θ0 - угол падения радиолуча на ионосферу.
МПЧ это та частота, при которой еще отражаются волны, посланные антенной радиопередатчика в направлении на горизонт. На частотах выше МПЧ слой вообще перестает отражать волны, посланные с поверхности Земли, и они уходят сквозь ионосферу в космос.
Обычно на ионосферных радиолиниях связь возможна на рабочих частотах от НПЧ до МПЧ. На рабочей частоте формируется радиосигнал с полосой частот, равной Δf0. Таким образом, на линии радиосвязи возможна организация нескольких радиоканалов, число которых

Каждый канал характеризуется рабочей частотой, за которую принимается средняя частота из полосы Δf0. Из-за изменчивости ионосферы - среды отражения радиосигнала и многолучевого характера его приема, надежность КВ радиосвязи на отдельных рабочих частотах может быть недостаточно высокой. Решение задачи обеспечения установленных требований по надежности и помехоустойчивости радиосвязи связано с адаптацией по рабочей частоте системы КВ связи к изменяющимся условиям распространения радиоволн.
Навигационная аппаратура потребителей (НАП) или навигационных приемников (НП) глобальных навигационных спутниковых систем (ГНСС) применяется при создании современных систем навигации и ориентации. Это обусловлено, в первую очередь, такой их характеристикой, как возможность определения с высокой точностью координат, скорости и ориентации объекта, расположенного в любой точке земного шара.
Одной из основных проблем при использовании НП ГНСС является подверженность сигналов навигационных космических аппаратов ГНСС влиянию окружающей среды и помех. Заметное влияние на точность навигационных определений по сигналам систем ГЛОНАСС/GPS оказывают условия прохождения сигнала "сверху-вниз". Как показывают исследования, наибольшее влияние на погрешность измерения сигналов систем ГЛОНАСС/GPS оказывает ионосфера.
Дальность ρ(t) при радиотехнических измерениях характеризуется временем распространения сигнала от спутника до НП. В случае, когда это время точно известно (с исключением задержки радиосигнала ионосферой) истинная дальность составит величину

где с - скорость распространения радиоволн в космическом вакууме; Δt - интервал между моментом излучения сигнала КА и моментом его приема ПИ. За счет задержки радиосигнала ионосферой появляется псевдодальность ρп(t), которая отличается от истинной

где Δtз - задержка радиосигнала ионосферой. При этом

Учитывая выражение (5) можно записать, что

Величина запаздывания сигналов в ионосфере, зависит от периода 11-летнего цикла солнечной активности, сезонных и ежедневных вариаций электронной концентрации в ионосфере, угла места и азимута спутника, а так же от широты и долготы расположения НП.
Ионосферная рефракция радиосигнала спутника, вызванная различиями диэлектрической проницаемости слоев, расположенных на разных высотах, а также локальными неоднородностями, изменяется в широких пределах. В зависимости от района Земли, где расположен НП, времени суток, года, солнечной и геомагнитной активности и т.д., задержка спутникового радиосигнала в ионосфере может составлять величину 5…500 нс, что эквивалентно ошибке измерения дальности в 1,5…150 м.
Среднее значение этой погрешности для углов возвышения близких к 90° составляет в ночное время 5…10 нс и 30…50 нс - в дневное. При углах возвышения порядка 15° эти величины возрастают в 2…3 раза. При этом надо отметить, что величина задержки радиосигнала равной 1,0 нс вносит погрешность в измерении истинной дальности на 1,5 метра.
Надо отметить, что чем большая концентрация электронов будет в ионосфере, то тем большая задержка радиосигналов будет при их приеме и соответственно увеличится погрешность измерения дальности. Эта особенность может быть использована для определения fмпч.
Предлагаемый способ определения МПЧ для ионосферной радиосвязи базируются на следующих положениях.
Во, первых, априорно известно, что КВ диапазон, это частоты от fmin=3 МГц (100 м) до fmax=30 МГц (10 м). При этом также известно, что радиоволны с рабочей частотой fраб>fmax не отражаются от ионосферы, а проходят через ионосферу в космическое пространство, и наоборот частоты, для которых fраб<fmax отражаются от ионосферы, как от зеркальной поверхности.
Предлагаемый способ определения максимально применимой частоты учитывает эти объективные особенности. Критическая частота представляется выражением, в котором содержится информация об известной ее фиксированной части и изменяющейся составляющей в виде

при этом максимальное значение величины Δfi известно и равно величине Δfmax=(fmax-fmin). Величина Δfi в первую очередь зависит от параметров ионосферы, которые могут быть определены через ее электронную плотность, величину задержки сигнала и т.д.
Представим величину Δfi в виде Δfi=S·Δfmax, где величина S представляет собой вводимый нормирующий коэффициент. Величина S определяется исходя из величины задержки радиосигнала в ионосфере (которая в свою очередь зависит от ее электронной плотности) и выражается в данном способе через ошибку определения координат Δxi, Δyi навигационным приемником, истинное положение которого на местности известно априорно.
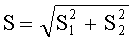
Рассмотрим, как определяются величины Δxi и Δyi. Пусть НП радиосигналов находится в точке А с координатами (x,y), определяющих априорно известную широту и долготу его местоположения. За счет ошибки измерения истинных дальностей (из-за задержки сигнала в ионосфере) будет ошибка и в точном определении координат НП на величину Δxi и Δyi (фиг.1).
При этом можно записать, что при наличии ошибки в измерении координат точки А (местоположение НП) от истинного сместится на величину

где Δxi и Δyi - ошибка определения истинных координат объектов, выраженная в метрах.
Тогда зная априорно истинное местонахождение НП (его координаты), и возможное их смещение за счет ошибок измерения дальностей (запаздывания радиосигнала из-за ионосферы) можно определить величины Δxi и Δyj, характеризующие ошибку в измерении координат точки А (х0,y0)

Представим согласно выражению (9) положение НП в декартовой системе координат. При этом условно зафиксируем истинное положение НП в точке А, принимая, что величины Δх0=0 и Δy0=0 (фиг.1).
Тогда зная истинное значение координат можно определить значения Δxi, Δyj, которые будут характеризовать отклонение координат от истинного значения по результатам измерений с использованием НП типа GPS/ГЛОНАСС.
С учетом сказанного, выражение (8), определяющее критическую частоту можно представить в виде

где S - нормирующий коэффициент, характеризующий задержку радиосигнала, в зависимости от электронной плотности ионосферы. При этом принимается, что

где Δxi и Δyi - текущая ошибка определения координат объекта, Δxmax и Δymax - максимально возможное значение ошибки при определении координат местонахождения навигационного приемника, которое задается априорно. При этом соблюдается, что 0≤Δxi≤Δxmax и 0≤Δyi≤ymax, а значение нормирующего коэффициента может принимать значения в диапазоне 0≤S≤1 в зависимости от состояния ионосферы.
Выражение (11) можно переписать в виде

Когда S=1, fкр=fкр(max)=30,0 МГц и когда S=0, fкр=fкр(min)=3,0 МГц.
Максимально применимая частота ионосферной радиосвязи определяется согласно выражению

а значение оптимальной рабочей частоты определяют согласно выражению

Под оптимальной рабочей частотой (ОРЧ) понимается такая частота, на которой обеспечивается максимальная длительность работы КВ передатчика без перестройки на другие частоты.
В соответствие с (14) МПЧ наклонно падающая на ионосферу, будет в secφ0 раз превышать критическую частоту. С учетом сферичности Земли и ионосферы, которая ограничивает угол падения волны на ионосферу, максимальное значение secφ0≈4,1, то есть отношение М=fмпч/fкp<4,1.
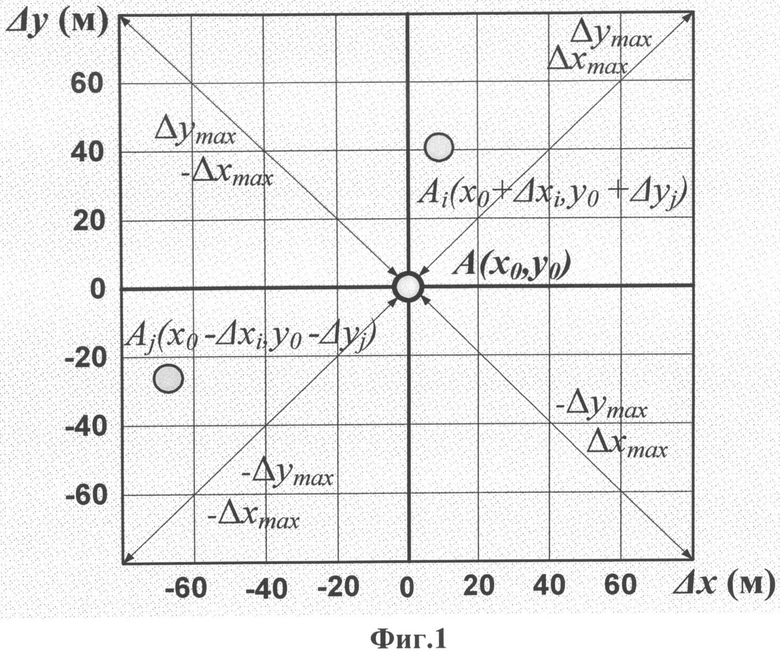
Система определения максимально применимой частоты для ионосферной связи, реализующее предлагаемый способ (фиг.2), содержит выносную приемную спутниковую антенну 1, одночастотный навигационный приемник 2, формирователь разностного сигнала 3, источник сигналов истинных координат по долготе и широте 4, формирователь сигнала нормирующего коэффициента 5, источник сигналов максимальной ошибки определения координат 6, вычислитель значений критической частоты 7, вычислитель значений максимально применимой частоты и оптимальной рабочей частоты 8, вычислитель параметров радиосигнала 9, формирователь сигналов графических и табличных данных 10. отображающее устройство для визуального восприятия информации 11. пульт ввода априорных данных и управления 12, блок ввода, хранения и выборки данных 13, анализатор и формирователь управляющих сигналов для режима автоматического управления работой радиопередатчика и радиоприемника 14, канал связи 15 и 18, радиопередатчик 16, передающую КВ антенну 17, радиоприемник 19, приемную КВ антенну 20.
Система работает следующим образом. Радиосигнал с выхода приемной антенны 1 поступает на вход приемника 2. С выхода приемника 2, сигналы, характеризующие измеренные координаты (по долготе и широте) поступают на первый и второй входы формирователя разностного сигнала 3, на третий и четвертый входы которого поступают сигналы истинных координат от источника сигналов 4. Разностный сигнал определяется согласно выражению (10). Сравнивая в формирователе 3 известные координаты, полученные априорно в результате прецизионной геодезической съемки, с измеренными координатами, на выходе формирователя 3 получают разностные сигналы (по x и y), которые поступают на первый и второй входы формирователя 5. На третий и четвертый входы формирователя 5 подаются от источника 6 сигналы, которые характеризуют максимально возможное значение ошибки Δxmax и Δymax при определении координат местонахождения навигационного приемника. Алгоритм работы формирователя сводится к нахождению нормирующего коэффициента S в соответствии с выражением (12), который в зависимости от ошибки определения координат (большей или меньшей степени задержки радиосигнала) будет изменять свои значения в интервале 0≤S≤1. Это приведет к тому, что значения критической частоты будут изменяться в диапазоне частот от fmin до fmax.
С выхода формирователя 5 сигнал поступает на вход вычислителя значений критической частоты 7, который реализует операции, согласно выражению (13). С выхода вычислителя 7 сигнал, определяющий значение критической частоты fкр, поступает на вход вычислителя 8, в котором определяется значение максимально применимой частоты fмпч согласно выражению (14) и оптимальная рабочая частота fорч, согласно выражению (15).
Сигнал с первого выхода вычислителя 8 поступает на первый вход вычислителя параметров радиосигнала 9, со второго и третьего выходов вычислителя 8 на первый и второй входы формирователя сигналов графических и табличных данных 10. Расчет параметров сигналов в вычислителе 9 необходим для оценки помехоустойчивости сигнала (при известной мощности передатчика и чувствительности радиоприемника, коэффициента усиления антенны и др.). На основе данных вычислителей 8 и 9 в формирователе 10 осуществляется формирование сигналов табличных данных, построение графиков, показывающих зависимость fмпч от текущего времени и другие зависимости.
С четвертого выхода вычислителя 8 сигнал поступает на третий вход блока ввода, хранения и выборки данных 13, на первый вход которого поступает сигнал с выхода вычислителя 7, на второй вход сигнал с четвертого выхода пульта ввода априорных данных и управления 12, а на четвертый вход блока 13 сигнал с первого выхода формирователя 10. Сигналы с первого, второго, третьего и пятого выходов пульта 12 поступают соответственно на входы источника сигналов 4, источника сигналов 6, второй вход вычислителя 9 и второй вход анализатора и формирователя 14. С помощью ввода априорных данных через источник 6 может корректироваться значение коэффициента S в формирователе 5 для последующего вычислении значения критической частоты в вычислителе 7. Ввод априорных данных с пульта 12 необходим также для задания алгоритма и автоматической работы анализатора и формирователя 14.
Сигнал с первого выхода блока 13 поступает на второй вход вычислителя 7, а также со второго выхода на второй вход вычислителя 8. При необходимости в блок ввода, хранения и выборки информации 13 могут поступать сигналы от внешних источников информации (других приемников GPS и т.д.) через пятый вход (а). В блоке 13 осуществляется ввод, запоминание данных, их хранение и выборка по мере необходимости с возможностью долгосрочного накопления данных (день, ночь, лето, зима и др.).
Сигнал с выхода вычислителя 9 поступает на третий вход формирователя 10, со второго выхода которого сигнал поступает на вход отображающего устройства для визуального восприятия информации 11.
Оператор данной системы, на основе анализа получаемой информации о МПЧ и ОРЧ принимает, например, необходимые организационно-технические мероприятия по установке оптимальной рабочей частоты в радиопередатчике, и доводит эту информацию известными способами по установке такой же частоты на приемной стороне.
Наряду с назначением системы для работы в операторном режиме, автоматизация процессов установления сеансов радиосвязи актуальна и необходима при непрерывном действии стационарных и мобильных КВ передатчиков, когда необходима периодическая смена рабочих частот в течение суток или когда время работы КВ передатчиков априорно неизвестно, и они могут включаться и выключаться автоматически по заданному алгоритму в любое время текущих суток для передачи информации.
Для автоматического управления режимом работы возбудителя КВ передатчика и настройки радиоприемника на оптимальную рабочую частоту в системе (фиг.2) дополнительно введен анализатор и формирователь управляющих сигналов 14 для режима автоматического управления работой радиопередатчика и радиоприемника. С его помощью формируется цифровой сигнал управления в последовательном двоичном коде, разрядность которого определяется максимально возможным числом организуемых частотных каналов для ионосферной радиосвязи

где m - число разрядов цифрового сигнала управления m=1,2,3,4,…Z.
Для этих целей сигнал с пятого выхода вычислителя 8, отражающий оптимальную рабочую частоту fорч поступает на вход формирователя 14, с первого выхода которого сигнал поступает в канал связи 15, а со второго выхода сигнал поступает на вход канала связи 18. Каналы связи 15, 18 содержат необходимую передающую и приемную каналообразующую аппаратуру.
С выхода канала связи 15 управляющий сигнал поступает на вход радиопередатчика 16 (в блок синтезатора частот), с выхода которого радиосигнал поступает на вход передающей КВ антенны 17 и излучается в эфир. С выхода канала связи 18 управляющий сигнал поступает на второй вход радиоприемника 19. По данному управляющему сигналу осуществляется настройка радиоприемника на прием оптимальной рабочей частоты КВ передатчика. Радиосигнал, излучаемый передатчиком, с помощью антенны 17 достигает ионосферы, и, отражаясь от нее, поступает на вход приемной антенны 20, с выхода которой поступает на первый вход радиоприемника 19.
Автоматическое переключение несущей частоты радиопередатчика на другую новую оптимальную рабочую частоту, при проведении сеансов радиосвязи, может осуществляться по разным принятым алгоритмам анализа их хода в течение суток. Это может осуществляться, например, путем формирования цифрового управляющего сигнала для автоматического переключения несущей частоты радиопередатчика и радиоприемника, при наличии изменения максимально применимой частоты через определенные интервалы времени Δti, за счет ее увеличения или уменьшения, относительно первоначального исходного ее значения на моменты времени t1, t2,… tn, которые характеризуют начало проведения сеанса радиосвязи на новых оптимальных рабочих частотах в КВ диапазоне в течение суток.
Необходимые алгоритмы и режимы работы по изменению оптимальной рабочей частоты задаются с использованием блока 12. Цифровой сигнал определенной кодовой последовательности, несущий информацию об оптимальной рабочей частоте на текущий момент времени передается до радиопередатчика и радиоприемника по типовым каналам связи или сети Интернет.
На фиг.2 показано, что система определения МПЧ, включающая основные блоки 1-14, имеет свое местоположение в точке А(x,y). Радиопередатчик (блоки 16-17) и радиоприемник (блоки 19-20) имеют свое месторасположение в точках B(x,y) и С(x,y). Выделим следующие ситуации по излучению радиоволн в направление приемника (корреспондента):
- передающая антенна передатчика излучает до ионосферы радиоволны направленные вертикально;
- передающая антенна передатчика излучает до ионосферы радиоволны направленные наклонно. Прием отраженных радиоволн осуществляется на расстоянии одного скачка.
Для первого случая радиоволны излучаются вверх. Затем они отражаются от ионосферы в обратном направлении вниз. При этом определяется состояние ионосферы и соответственно МПЧ непосредственно над пунктом расположения передающей радиостанции. Прием радиосигналов для данного случая возможен на расстояниях до нескольких сот километров в любые стороны от радиопередатчика (с радиусом порядка 500 км). Согласно принятым обозначениям на фиг.2, местоположение системы А(x,y) и радиопередатчика B(x,y) практически одинаковое. Расположение радиоприемника в точке С(x,y) может отстоять от радиопередатчика на расстоянии до 500 км.
Для второго случая радиоволны излучаются наклонно (например, с углом излучения от 80°…20°) в заданном направлении. При односкачковом отражении радиоволны от ионосферы, они будут отражаться от ионосферы примерно на расстояниях от 1000 до 2000 км от радиопередатчика. Прием радиосигналов для данного случая возможен примерно на расстояниях от 2000 до 4000 км от радиопередатчика. Система определения МПЧ должна располагаться в месте B(x,y), где вверху происходит непосредственное отражение радиоволны от ионосферы (это место зависит от угла излучения радиоволн в ионосферу передатчиком из точки А(x,y)). В этом случае навигационный приемник и система определения МПЧ находится примерно на середине радиотрассы между радиопередатчиком и радиоприемником, то есть между точками А(x,y) и С(x.y). В табл.1 показаны местоположения взаимодействующих компонент при двух вариантах направления радиолуча до ионосферы.
Предложенный способ затрагивает прием радиосигналов не только от спутниковых систем типа GPS/ГЛОНАСС. Предложенные технические решения могут быть распространены и на другие космические системы, например, на европейскую глобальную навигационную спутниковую систему GALILEO.
Принцип действия и описание работы рассматриваемой системы, включающей пути нахождения МПЧ, обработки сигналов и других вопросов можно найти в следующих публикациях [1-4, 12]:
Источники информации
1. Родос Л.Я. Электродинамика и распространение радиоволн: учебное пособие / Л.Я. Родос. - Сан.-Пб.: Из-во СЗТУ, 2007, - 90 с.
2. Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000. - 268 с.
3. Казанцев М.Ю., Фатеев Ю.Л. Определение ионосферной погрешности измерения псевдодальностей в одночастотной аппаратуре систем ГЛОНАСС и GPS // Журнал радиоэлектроники №12, 2002 г.
4. Пат. 6163295 США, МКИ7 Н04В 7/185. Ionospheric correction for single frequency GPS receivers using two satellites / V. Nagasamy, М. Usman, J. Sun (США); VSIS, Inc. (США). Заявл. 09.04.99; Опубл. 19.12.2000, и др.).
5. Патент РФ 94028469 от 20.05.1996 года на устройство определения максимальной применимой частоты для КВ радиолинии.
6. Патент РФ 2154910 от 20.08.2000 года на систему автоматического управления коротковолновой связью.
7. Патент РФ 2307463 от 27.09.2007 года на способ выбора рабочих частот для радиолиний ионосферных волн.
8. Патент РФ 2181490 от 20.04.2002 на устройство и способ спутникового радиоопределения.
9. Патент РФ 1840572 от 20.08.2007 года на фазовый способ измерения интегральной электронной концентрации в ионосфере.
10. Патент РФ 2421753 от 20.06.2011 года на способ определения параметров ионосферы и устройство для его осуществления.
11. Патент РФ 2208809 от 20.07.2003 года на способ одночастотного определения задержки сигналов навигационной спутниковой системы в ионосфере.
12. Грудинская Г.П. Распространение радиоволн. Учеб. пособие для радио-техн. спец. вузов. М., Высшая школа, 1975. 260 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления декаметровой радиосвязью | 2022 |
|
RU2800643C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОРОТКОВОЛНОВОЙ СВЯЗЬЮ | 2019 |
|
RU2719551C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ И СЕТЕЦЕНТРИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИОНОСФЕРЫ | 2023 |
|
RU2814464C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2469890C2 |
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИЗМЕРЕНИЯ ФАЗОВОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2000 |
|
RU2189052C2 |
Изобретение относится к области ионосферной радиосвязи и предназначается для определения максимально применимой частоты. Технический результат состоит в обеспечении надежной и достоверной радиосвязи в заданное время на дальние расстояния. Для этого осуществляют передачу радиосигналов на заданных частотах от навигационных спутников типа GPS/ГЛОНАСС на Землю, прием радиосигналов, прошедших дистанционную среду "спутник-Земля" на приемной стороне одночастотным навигационным приемником, стандартную обработку принятых радиосигналов для определения координат местоположения одночастотного навигационного приемника, а также отображение результатов вычисления, полученные посредством одночастного навигационного приемника координаты местонахождения этого навигационного приемника сравнивают с заранее сформированными на основе априорной геодезической съемки координатами местонахождения навигационного приемника и получают разностные величины координат навигационного приемника. 2 з.п. ф-лы, 2 ил.
1. Способ определения максимально применимой частоты для ионосферной радиосвязи KB диапазона, включающий передачу радиосигналов на заданных частотах от навигационных спутников типа GPS/ГЛОНАСС на Землю, прием радиосигналов, прошедших дистанционную среду "спутник-Земля" на приемной стороне одночастотным навигационным приемником, стандартную обработку принятых радиосигналов для определения координат местоположения (xi,yi) одночастотного навигационного приемника, а также отображение результатов вычисления, отличающийся тем, что полученные посредством одночастного навигационного приемника координаты местонахождения этого навигационного приемника (xi,yi) сравнивают с заранее сформированными на основе априорной геодезической съемки координатами местонахождения навигационного приемника (x0,y0) и получают разностные величины координат навигационного приемника Δxi и Δyi, далее образуют нормирующие коэффициенты S1 и S2, которые равны величинам:
S1=Δxi/Δxmax и
S2=Δyi/Δymax,
где Δxi и Δyi - текущая ошибка определения координат навигационного приемника, Δxmax и Δymax - задаваемое максимально возможное значение ошибки при определении координат местонахождения навигационного приемника, при этом величины текущей ошибки принимают значения 0≤Δxi≤Δxmax и 0≤Δyi≤Δymax;
на основе значений величин Si и S2 формируют обобщенный нормирующий коэффициент S, значение которого определяется исходя из условия:
затем осуществляют вычисление значения критической частоты KB диапазона fкр согласно выражению:
fкр=(fmin+S·Δf);
где fmin - минимальная частота KB диапазона,
Δf - полоса частот KB диапазона (Δf=fmax-fmin),
fmax - максимальная частота KB диапазона;
максимально применимая частота fмпч определяется на основе выражения:
fмпч=fкр·secφ0=(fmin+S·Δf)·secφ0,
где φ0=π/2-θ0 - угол падения радиолуча на ионосферу;
коэффициент, значение оптимальной рабочей частоты fорч радиоприемника и радиопередатчика KB диапазона определяют из значений максимально применимой частоты KB диапазона согласно выражению:
fорч=0,9·fмпч.
2. Способ определения максимально применимой частоты для ионосферной радиосвязи KB диапазона по п.1, отличающийся тем, что на основе оптимальной рабочей частоты fорч формируют цифровой сигнал управления, представленный в последовательном двоичном коде, разрядность которого определяется максимально возможным числом организуемых частотных каналов n для ионосферной радиосвязи KB диапазона из выражения:
n=(fмпч·fнпч)/Δf0,
где fнпч - наименьшая применимая частота,
Δf0 - полоса частот, которую занимает один канал радиопередачи, n≤2m, m - число разрядов цифрового сигнала управления, m=1,2,3, …, Z.
3. Способ определения максимально применимой частоты для ионосферной радиосвязи KB диапазона по п.2, отличающийся тем, что при наличии изменения максимально применимой частоты fмпч через определенные интервалы времени Δti, за счет ее увеличения или уменьшения, относительно первоначального исходного ее значения на моменты времени t1, t2, … tn, которые характеризуют начало проведения сеансов радиосвязи на новых оптимальных рабочих частотах в KB диапазоне, для автоматического переключения несущей частоты радиопередатчика и радиоприемника осуществляют формирование цифрового управляющего сигнала на другую новую оптимальную рабочую частоту.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2421753C1 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| RU 94028469 A, 20.05.1996 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОРОТКОВОЛНОВОЙ СВЯЗЬЮ | 1997 |
|
RU2154910C2 |
| СПОСОБ ВЫБОРА РАБОЧИХ ЧАСТОТ ДЛЯ РАДИОЛИНИЙ ИОНОСФЕРНЫХ ВОЛН | 2006 |
|
RU2307463C1 |

