Область техники, к которой относится изобретение
Настоящая технология относится к устройствам приема, способам приема и программам и, более конкретно, к устройству приема, способу приема и программе, которые разработаны с возможностью улучшения характеристик приема.
Уровень техники
OFDM
При передаче данных с использованием OFDM (ортогональное мультиплексирование с частотным разделением) большое количество ортогональных поднесущих используют в полосе передачи, и данные размещают по амплитуде и фазе каждой из поднесущих. Передают данные каждого символа, называемого символом OFDM. Во время передачи выполняют IFFT (обратное быстрое преобразование Фурье) для каждого символа OFDM.
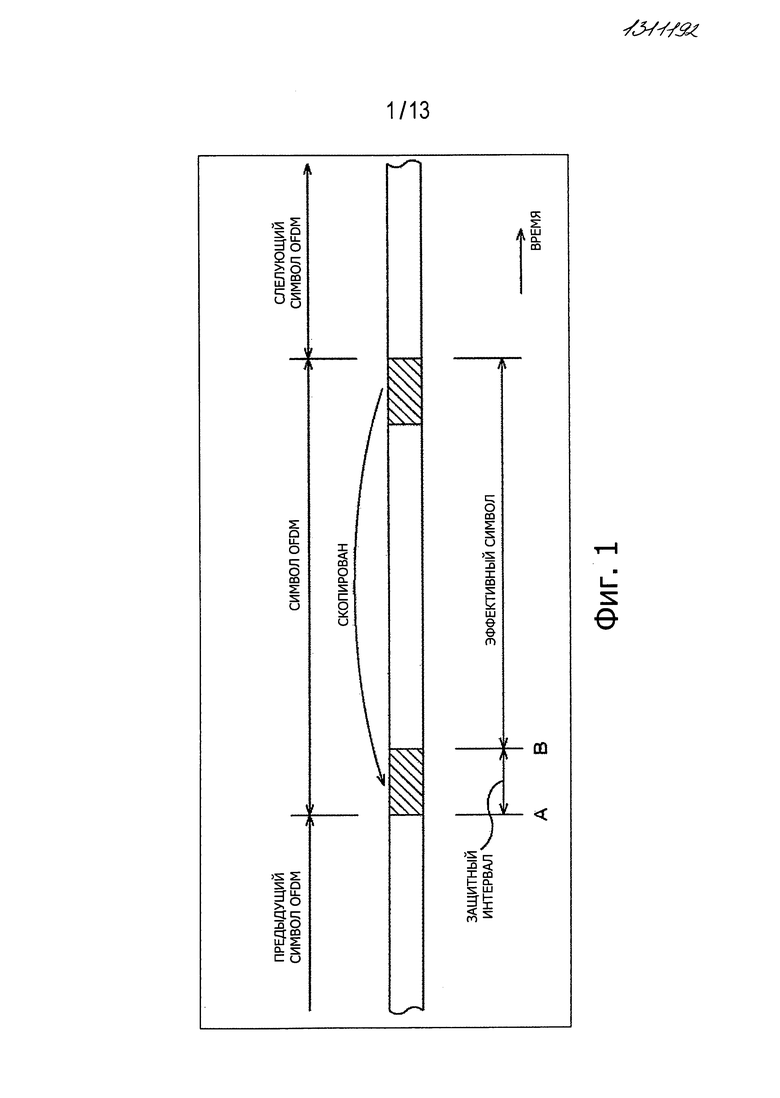
На фиг.1 показана схема, представляющая символы OFDM. Символ OFDM обычно формируют с эффективным символом, который представляет собой интервал сигнала, в котором выполняют IFFT, во время передачи, и защитный интервал (GI) формируют путем копирования формы колебаний части последней половины эффективного символа и помещают эту копию вверху эффективного символа.
Поскольку защитный интервал формируют в верхней части символа OFDM, может быть повышена устойчивость к многолучевому распространению. Такие символы OFDM составляют один фрейм передачи OFDM.
MISO в DVB-T2
В соответствии со стандартами цифровой наземной широковещательной передачи второго поколения в Европе (DVB-T2), может быть выполнена передача данных с использованием MISO (множество входов, один выход). Например, данные передают, используя две антенны на стороне передачи. В соответствии с этим, может быть сгенерировано диверсифицирование комбинации сигналов, передаваемых от двух антенн, и характеристики приема могут быть улучшены. Передача данных с использованием MISO особенно эффективна в среде с интенсивным многолучевым распространением.
На фиг.2 показана схема, представляющая передачу данных с использованием MISO, в соответствии с DVB-T2.
Как показано на фиг.2, передатчик MISO имеет две антенны, такие как антенна 1 (Tx1) и антенна 2 (Tx2), и приемник MISO имеет одну антенну (Rx1). Два сигнала Sa и Sb, которые формируют пару Аламоути, подают на передатчик MISO.
Передатчик MISO выполняет кодирование Аламоути для Sa и Sb и передает Sa и Sb в этом порядке из Tx1. Тем временем, передатчик MISO передает (Sa)*, который представляет собой комлексносопряженную величину для Sa, и -(Sb)*, который представляет собой величину с инвертированным знаком, из Tx2 в порядке от - (Sb)* до (Sa)*.
Приемник MISO устанавливает характеристики H11, H12, H21 и H22 канала и выполняет декодирование Аламоути для принятых сигналов Ra и Rb, для получения переданных сигналов Sa и Sb (Sa' и Sb), где время для передачи Sa из Tx1 и -(Sb)* из Tx2 представляет собой время t1 и время для передачи Sb из Tx1 и (Sa) из Tx2 представляет собой время t2, H11 представляет характеристики канала между Tx1 и Rx1 во время t1 и используется как вес Sa. Аналогично, H12 представляет характеристики канала между Tx1 и Rx1 во время t2 и используется как вес для Sb. H21 представляет характеристики канала между Tx2 и Rx1 во время t1 и используется как вес для - (Sb)*, и Н22 представляет характеристики канала между Tx2 и Rx1 во время t2 и используется как вес для (Sa)*.
В приемнике MISO принятые сигналы Ra и Rb выражаются следующими уравнениями (1) и (2).
Математическая формула 1

Математическая формула 2

Уравнения (1) и (2) преобразуют в детерминант, как показано в следующем уравнении (3).
Математическая формула 3

где матрица R представляет принимаемые сигналы, матрица Н представляет характеристики канала и матрица S представляет переданные сигналы, уравнение (3) выражается уравнением (4), представленным ниже. Матрицы R, Н и S выражаются уравнениями (5), (6) и (7) соответственно.
Математическая формула 4
Математическая формула 5

Математическая формула 6

Математическая формула 7

Декодирование Аламоути приемником MISO выражается уравнением (8), представленным ниже. S' представляет собой матрицу, представляющую сигналы, полученные после декодирования Аламоути.
Математическая формула 8

В уравнении (8) для получения матрицы S, представляющей переданные сигналы из матрицы R, представляющей принятые сигналы, матрицу R умножают на инверсную матрицу для матрицы Н, представляющей характеристики канала. Если отсутствуют шумы, матрица S получается точно такой же, как и матрица S'. Матрица S' выражается следующим уравнением (9).
Математическая формула 9

Приемник MISO выводит 

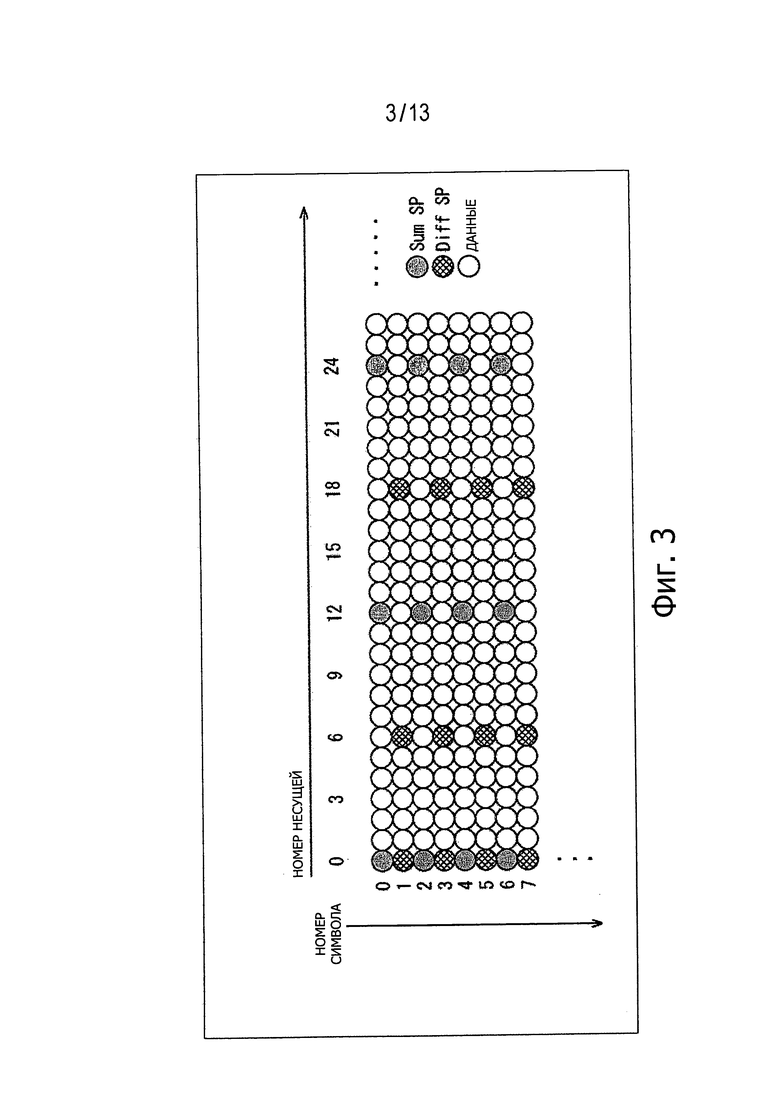
На фиг.3 показана схема, представляющая пример компоновки сигналов SP (рассеянный пилотный сигнал) в случае, когда передача данных выполняется в соответствии с MISO. На фиг.3 по оси абсцисс обозначен номер несущей, и по оси ординат обозначен номер символа.
Сигналы SP представляют собой известные сигналы, которые используются при оценке характеристик канала. В стандартах цифровой широковещательной наземной передачи в Европе (DVB-T) и в стандартах цифровой наземной широковещательной передачи в Японии (ISDB-T) уникально установлена компоновка сигналов SP. В DVB-T2, с другой стороны, определены восемь пилотных структур (PP). Приемник MISO DVB-T2 определяет PP на основе информации, содержащейся в принимаемых сигналах, и оценивает характеристики канала, используя сигналы SP. Компоновка SP, показанная на фиг.3, представляет собой компоновку в случае PP2.
Когда передачу данных выполняют с использованием MISO, сигналы SP передают как сигналы суммы Sum SP или сигналы разности DiffSP, как показано на фиг.3.
Сигнал Sum SP представляет собой сигнал SP для символа, имеющего четный номер, выделенный для него (номер символа представляет собой четный номер). Сигналы суммы Sum SP передают как сигналы SP, имеющие полярности, которые не будут изменены (ниже называются нормальными сигналами SP) из Tx1 и Tx2, и их комбинируют в приемнике MISO.
Сигнал DifF SP представляет собой сигнал SP для символа, имеющего нечетный номер, выделенный для него (номер символа представляет собой нечетный номер). Сигналы Diff SP передают как нормальные сигналы SP через Tx1 и как сигналы SP, имеющие реверсированные полярности (ниже называются инвертированными сигналами SP) через Tx2, и для них выполняют вычитание в приемнике MISO. В состоянии, в котором полярность реверсирована, наблюдается симметрия относительно точки на плоскости I-Q.
Приемник MISO выполняет интерполяцию для сигналов Sum SP и сигналов Diff SP в направлении времени и в направлении частоты и выполняет оценку характеристик канала для всех несущих.
Сигналы DVB-T2
В соответствии с DVB-T2, определены фреймы, называемые фреймами Т2, и данные передают в фрейме T2.
Каждый фрейм T2 содержит два вида сигналов преамбулы, называемых P1 и P2, и эти сигналы преамбулы содержат информацию, необходимую для выполнения таких операций, как демодуляция сигнала OFDM.
На фиг.4 показана схема, представляющая структуру фрейма для фрейма T2. Как показано на фиг.4, один фрейм T2 включает в себя символ P1, символы P2 и символы данных (нормальные или FC).
Символ P1 представляет собой символ для передачи сигналов Р1 и содержит следующую информацию от a до d.
a. Идентификация фрейма
b. Способ передачи
c. Размер FFT
d. Частичная длина GI
Идентификация фрейма обозначает, является ли фрейм передачи фреймом T2 или FEF (фрейм будущего расширения). Способ передачи обозначает, представляет ли способ передачи SISO (один вход, один выход) или MISO (множество входов, один выход). Размер FFT обозначает количество точек в одной операции IFFT на стороне передачи. Частичная длина GI обозначает, какой группе принадлежит длина GI, используемая при передаче символа, при этом семь типов длин GI разделены на две группы.
Для определения, является ли способ передачи, используемый для передачи сигналов, SISO или MISO, приемник MISO должен декодировать сигналы PL. Хотя описанную выше информацию от а до d передают с использованием сигналов с наложением в символах P2, описанная выше информация от а до d сигналов P1 необходима для декодирования сигналов L1PRE и сигналов L1POST символов P2.
Список литературы
Непатентный документ
[0028] Непатентный документ 1: "Frame structure channel coding and modulation for a second generation digital terrestrial television broadcasting system (DVB-T2)", DVB Document A 122 June 2008
Раскрытие изобретения
Задачи, решаемые изобретением
В MISO существуют значительные различия между мощностью сигнала SumSP и мощностью сигнала Diff SP, в зависимости от состояния канала передачи между Tx1 и Rx1 и канала передачи между Tx2 и Rx1. Примеры таких ситуаций описаны ниже.
Пример 1
Случай, когда амплитудные характеристики и фазовые характеристики являются одинаковыми между каналом передачи Tx1-Rx1 и каналом передачи Tx2-Rx1 (когда H11=H21 и H12=H22)
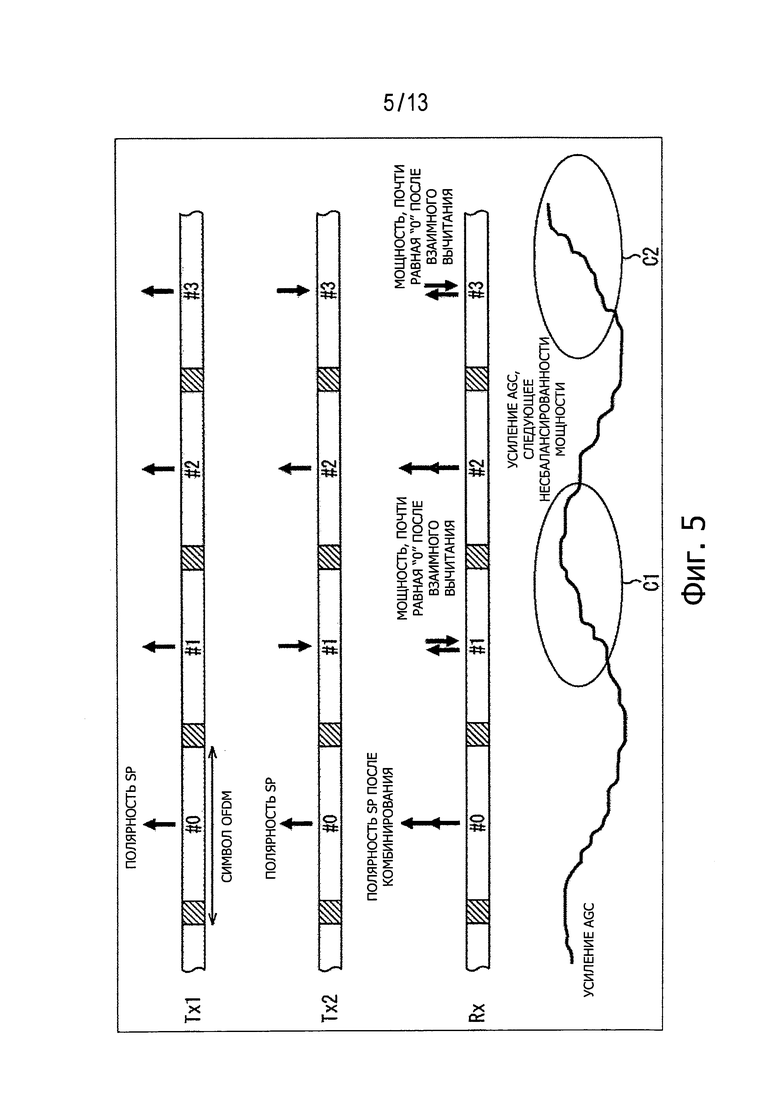
В этом случае, что касается символа с нечетным номером, нормальный сигнал SP из Tx1 и инвертированный сигнал SP из Tx2 взаимно компенсируют друг друга, и мощность сигнала Diff SP в приемнике MISO равна "0", как показано на фиг.5. Таким образом, мощность SP становится равной "0" для каждого второго символа.
В первом ряду на фиг.5 указаны сигналы, переданные из Tx1 передатчика MISO, и во втором ряду указаны сигналы, передаваемые из Tx2. В третьем ряду на фиг.5 указаны сигналы, принимаемые в Rx1 приемником MISO, и в четвертом ряду указан пример управления усилением в приемнике MISO.
В примере, показанном на фиг.5, мощность сигналов Diff SP, передаваемых, как нормальный сигнал SP из Tx1, и мощность сигналов Diff SP, передаваемых, как инвертированные сигналы SP из Tx2, взаимно компенсируют друг друга в приемнике MISO, как указано стрелками, представленными в символах #1 и #3, которые представляют собой символы с нечетными номерами. Мощность каждого сигнала Diff SP в приемнике MISO равна "0".
В то же время, мощность сигналов Sum SP передаваемых, как нормальный сигнал SP из Tx1 и мощность сигналов Sum SP, передаваемых как инвертированные сигналы SP из Tx2, объединяют друг с другом в приемнике MISO, как указано стрелками, представленными символами #0 и #2, которые представляют собой символы с четными номерами. Когда мощность каждого сигнала Sum SP равна "1", мощность каждого сигнала Sum SP в приемнике MISO равна "2".
Пример 2
Случай, когда амплитудные характеристики являются одинаковыми между каналом передачи Tx1-Rx1 и каналом передачи Tx2-Rx1, но фазовые характеристики являются противоположными (когда H11=-H21 и H12=-H22)
Этот случай является противоположным примеру 1. Что касается символа с четным номером, нормальный сигнал SP из Tx1 и инвертированный сигнал SP из Tx2 взаимно компенсируют друг друга, и мощность сигнала Sum SP равна "0". Таким образом, мощность SP становится равной "0" для каждого второго символа.
В других случаях, кроме примера 1 и примера 2, значительные различия могут возникать между мощностью сигналов Sum SP и сигналами Diff SP в MISO, в результате чего возникает несбалансированность мощности, которая проявляется для каждого второго сигнала во всех сигналах OFDM. В частности, в случае PP с более короткими интервалами сигнала SP, несбалансированность мощности становится заметной.
Обычно в приемнике MISO предусмотрена функция AGC (автоматическое управление усиления), и мощность входных сигналов OFDM поддерживается на постоянной величине. В случае, когда мощность входного сигнала OFDM низкая, устанавливают высокое усиление для повышения мощности. В случае, когда мощность входного сигнала OFDM высокая, с другой стороны, устанавливается низкое усиление для уменьшения мощности. Такое управление выполняют динамически.
Поэтому, в случае, когда входной сигнал OFDM представляет собой сигнал символа с четным номером, малое усиление следует за обнаружением высокой мощности в приемнике MISO, как показано в четвертом ряду на фиг.5. Кроме того, в случае, когда входной сигнал OFDM представляет собой сигнал символа с нечетным номером, большое усиление следует после обнаружения низкой мощности в приемнике MISO. Вариации усиления на участках, указанных эллипсами C1 и C2 на фиг.5, указывают, что сигналы OFDM представляют собой сигналы символов с нечетными номерами, и усиление следует обнаружению малой мощности.
Как описано выше, в зависимости от следующей скорости изменения усиления, после усиления возникает несбалансированность мощности, которая проявляется для каждого второго сигнала OFDM, и мощность входных сигналов OFDM значительно изменяется. В результате, могут ухудшиться характеристики приема.
Настоящая технология была разработана с учетом этих обстоятельств, и ее цель состоит в том, чтобы улучшить характеристики приема, даже когда передачу данных выполняют, используя, например, MISO.
Решение задач
Устройство приема, в соответствии с одним аспектом настоящей технологии включает в себя: модуль регулировки усиления для регулировки мощности сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигнала, имеющего высокую корреляцию в отношении полярного направления через различные каналы передачи, и второго пилотного сигнала, передаваемого в качестве сигнала, имеющего низкую корреляцию в отношении полярного направления через различные каналы передачи; и модуль управления для управления способностью следования усиления в модуле управления усиления, в соответствии со способом передачи данных.
Сигналы, имеющие высокую корреляцию в отношении полярного направления, включает в себя сигналы, которые не только имеют точно такие же полярные направления, но также имеют значение корреляции, равное или больше, чем пороговое значение корреляции, при этом значение корреляции указывает корреляцию с учетом полярного направления. Сигналы, имеющие низкую корреляция в отношении полярного направления, включают в себя сигналы, которые не только имеют точно противоположные направления полярности, но также имеют меньшее значение корреляции, чем пороговое значение корреляции, указывающее корреляцию в отношении полярного направления. Способность следования может быть указана скоростью следования.
Когда способ передачи данных представляет собой MISO, модуль управления может обеспечить следование усиления с характеристиками, отличными от SISO.
Модуль управления может управлять способностью следования усиления в модуле управления усилением путем изменения параметра, определяющего способность следования усиления.
Параметр, определяющий способность следования усиления, может представлять собой временную константу. Способностью следования усиления можно управлять путем изменения параметра другого, чем временная константа.
Модуль управления может управлять способностью следования усиления, путем остановки управления усилением, в то время как вводят один из первого пилотного сигнала и второго пилотного сигнала.
Модуль управления усилением может регулировать мощность сигнала OFDM в DVB-T2, при этом первый пилотный сигнал представляет собой сигнал Sum SP, второй пилотный сигнал представляет собой сигнал Diff SP.
Устройство приема может дополнительно включать в себя модуль обнаружения для обнаружения символа Р1. В этом случае, когда способ передачи данных, указанный информацией, содержащейся в символе Р1, представляет собой MISO, модуль управления может управлять способностью следования усиления в модуле управления усилением.
Модуль управления может управлять способностью следования усиления в модуле управления усилением, путем установки таких параметров, чтобы сделать способность следования усиления ниже, чем способность следования, достигаемая, когда способ передачи данных представляет собой SISO.
Устройство приема может дополнительно включать в себя модуль обработки, который выделяет первый пилотный сигнал и второй пилотный сигнал из сигнала OFDM, и определяет пилотный сигнал с более низкой мощностью. В таком случае модуль управления может управлять способностью следования усиления в модуле управления усилением путем остановки управления усилением, в то время как вводят пилотный сигнал с более низкой мощностью.
Устройство приема может дополнительно включать в себя модуль обработки для вычисления разности между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала. В этом случае, когда способ передачи данных, указанный информацией, содержащейся в символе P1, представляет собой MISO, и разность между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала равна или больше, чем пороговое значение, модуль управления может управлять способностью следования усиления в модуле управления усилением.
Модуль управления может управлять способностью следования усиления в модуле управления усилением, путем установки таких параметров, с тем, чтобы сделать способность следования усиления меньше, чем способность следования, достигаемая, когда способ передачи данных представляет собой SISO.
Модуль обработки может дополнительно определять, какой один из первого пилотного сигнала и второго пилотного сигнала имеет меньшую мощность, и модуль управления может управлять способностью следования усиления в модуле управления усилением путем остановки управления усилением, в то время как вводят пилотный сигнал с меньшей мощностью.
В одном аспекте настоящей технологии модуль управления усилением регулирует мощность сигнала, включающую в себя первый пилотный сигнал, передаваемый как сигналы, имеющие высокую корреляцию в отношении полярного направления, через разные каналы передачи, и второй пилотный сигнал, передаваемый как сигналы, имеющие низкую корреляцию в отношении полярного направления через разные каналы передачи. Модуль управления управляет способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных.
Эффекты изобретения
В соответствии с настоящей технологией может быть улучшена характеристика приема.
Краткое описание чертежей
На фиг.1 показана схема, представляющая символы OFDM.
На фиг.2 показана схема, представляющая передачу данных MISO.
На фиг.3 показана схема, представляющая пример компоновки SP.
На фиг.4 показана схема, представляющая структуры фрейма для фреймов T2.
На фиг.5 показана схема для пояснения разности мощности между сигналами Sum SP и сигналами Diff SP.
На фиг.6 показана блок-схема, представляющая пример структуры модуля обработки сигналов, предусмотренного в приемном устройстве, в соответствии с вариантом осуществления настоящей технологии.
На фиг.7 показана блок-схема последовательности операций для пояснения операции приемного устройства.
На фиг.8 показана блок-схема последовательности операций для пояснения первой операции управления способностью следования, предназначенной для выполнения на этапе S6 фиг.7.
На фиг.9 показана блок-схема последовательности операций для пояснения второй операции управления способностью следования, предназначенной для выполнения на этапе S6 фиг.7.
На фиг.10 показана блок-схема последовательности операций для пояснения других операций приемного устройства.
На фиг.11 показана блок-схема, представляющая пример структуры первого варианта осуществления приемного устройства.
На фиг.12 показана блок-схема, представляющая пример структуры второго варианта осуществления приемного устройства.
На фиг.13 показана блок-схема, представляющая пример структуры третьего варианта осуществления приемного устройства.
На фиг.14 показана блок-схема, представляющая пример структуры компьютерного оборудования.
Осуществление изобретения
Структура модуля обработки сигналов
На фиг.6 показана блок-схема, представляющая пример структуры модуля 11 обработки сигналов, в котором предусмотрено устройство приема в соответствии с вариантом осуществления настоящей технологии.
Устройство приема, включающее в себя модуль 11 обработки сигналов, показанный на фиг.6, имеет функцию приемника MISO для приема сигналов, передаваемых из передатчика MISO, такого как передатчик MISO, показанный на фиг.2, и функцию приема сигналов, передаваемых в соответствии с SISO. Устройство приема имеет антенну (Rx1).
Модуль 11 обработки сигналов включает в себя цифровой модуль 21 AGC, модуль 22 оперирования FFT, декодер 23 Аламоути, модуль 24 обнаружения PI/интерпретации сигналов, модуль 25 оценки характеристики канала, модуль 26 управления цифровым AGC, модуль 27 эквалайзера и модуль 28 переключения сигнала.
Сигналы OFDM, которые соответствуют DVB-T2 и которые получают путем выполнения A-D преобразования и ортогональной демодуляции принимаемых сигналов, получаемых с помощью Rx1, вводят в модуль 11 обработки сигналов. Сигналы OFDM, которые вводят в модуль 11 обработки сигналов, представляют собой сигналы в основной полосе пропускания, в области времени, перед операцией FFT и содержат компоненты реальной оси (компоненты I) и компоненты мнимой оси (компоненты Q).
Сигналы OFDM, которые вводят в модуль 11 обработки сигналов, представляют собой сигналы, передаваемые из передатчика, используя SISO или MISO. При передаче сигналов с использованием MISO, передатчик передает сигналы Sum SP как нормальные сигналы SP, из обоих Tx1 и Tx2, и сигналы DiffSP как нормальный сигнал SP через Tx1 и как инвертированный сигнал SP из Tx2. Сигналы Sum SP передают как сигналы, имеющие высокую корреляцию в отношении полярного направления через различные каналы передачи, и сигналы Diff SP передают как сигналы, имеющие низкую корреляцию в отношении полярного направления через разные каналы передачи.
Модуль 21 цифрового AGC регулирует усиление и управляет мощностью входных сигналов OFDM. В начале операции управление усилением с помощью модуля 21 цифрового AGC выполняют в соответствии с заданной временной константой. Временная константа представляет собой один из параметров, которые определяют способность следования при управлении усилением.
Управлением усилением с использования модуля 21 цифрового AGC управляют с помощью модуля 26 цифрового управления AGC, где это соответствует, в зависимости от способа передачи данных и т.п. Модуль 21 цифрового AGC выводит сигналы OFDM в области времени, имеющие отрегулированную мощность, на модуль 22 оперирования FFT и на модуль 24 обнаружения P1/интерпретации сигналов.
Модуль 22 оперирования FFT выполняет оперирование FFT для сигналов OFDM в области времени, подаваемых от модуля 21 цифрового AGC. Модуль 22 оперирования FFT выводит сигналы OFDM в области частоты, полученные в результате оперирования FFT, в декодер 23 Аламоути, модуль 25 оценки характеристики канала и в модуль 27 эквалайзера.
Декодер 23 Аламоути выполняет декодирование Аламоути, используя характеристики канала для канала передачи Tx1-Rx1 и канала передачи Tx2-Rx1, оценка которых была получена модулем 25 оценки характеристики канала для каждой несущей, и выполняет выравнивание для сигналов OFDM в области частоты.
Декодер 23 Аламоути выводит выровненные сигналы OFDM (Sa' и Sb') в модуль 28 переключения сигнала.
Модуль 24 обнаружения P1/интерпретации сигналов обнаруживает символ P1, содержащийся в верхней части фрейма T2, и декодирует сигналы P1, переданные через символ P1. На основе сигналов P1, полученных в результате декодирования, модуль 24 обнаружения P1/интерпретации сигналов определяет, представляет собой способ передачи данных способ SISO или MISO. Как описано выше, сигнал P1 содержит информацию, указывающую, представляет ли способ передачи способ SISO или MISO.
Когда способ передачи данных определен, как MISO, модуль 24 обнаружения P1/интерпретации сигналов выводит флаг MISO в соответствии с этим, в модуль 26 управления цифровым AGC и модуль 28 переключения сигнала. Информация о размере FFT и информация о частичной длине GI, содержащаяся в сигналах P1, декодированная модулем 24 обнаружения P1/интерпретации сигналов, используются в других модулях обработки, таких как модуль 22 оперирования FFT, когда это соответствует.
Модуль 25 оценки характеристик канала выделяет сигналы SP (сигналы Sum SP и сигналы Diff SP) из сигналов OFDM в области частоты, подаваемых от модуля 22 оперирования FFT, и выполняет оценку характеристик канала несущих в местах положений сигналов SP. Модуль 25 оценки характеристик канала интерполируют характеристики канала для мест положений сигналов SP в направлении времени и в направлении частоты, выполняет оценку характеристик канала для соответствующих несущих сигналов OFDM, и выводит информацию каналов, указывающую оценку характеристик канала, на декодер 23 Аламоути и на модуль 27 эквалайзера. Характеристики канала соответствующих несущих в канале передачи Tx1-Rx1 и в канале передачи Tx2-Rx1 подают на декодер 23 Аламоути.
В случае когда способ передачи данных представляет собой MISO, модуль 25 оценки характеристик канала выполняет вычисление разности между мощностью сигналов Sum SP и мощностью сигналов Diff SP и определяет, присутствует ли несбалансированность мощности, так же, как описано со ссылкой на фиг.5. Например, в случае, когда разность мощности между сигналами Sum SP и сигналами Diff SP равна или больше, чем пороговое значение, модуль 25 оценки характеристик канала определяет, что присутствует несбалансированность мощности, и выводит с этой целью флаг обнаружения несбалансированности мощности на модуль 26 управления цифровым AGC.
Модуль 25 оценки характеристик канала подсчитывает количество символов сигналов SP, и выводит информацию о количестве символов на модуль 26 управления цифровым AGC. Модуль 25 оценки характеристик канала также подсчитывает общую сумму мощности сигналов Sum SP и общую сумму мощности сигналов Diff SP, и определяет, какие сигналы SP между сигналами Sum SP и сигналами Diff SP имеют меньшую общую сумму мощности. Модуль 25 оценки характеристик канала выводит информацию, указывающую, какие из сигналов SP между сигналами Sum SP и сигналами Diff SP имеют меньшую общую сумму мощности, на модуль 26 управления цифровым AGC. Общие значения суммы мощности вычисляют, используя, например, заданное количество сигналов Sum SP и заданное количество сигналов Diff SP.
В случае, когда флаг MISO подают от модуля 24 обнаружения P1/интерпретации сигналов, модуль 26 управления цифровым AGC управляет способность следования усиления модуля 21 цифрового AGC. В случае, когда флаг MISO подают от модуля 24 обнаружения Р1/интерпретации сигналов, и флаг обнаружения несбалансированности мощности подают от модуля 25 оценки характеристик канала, модуль 26 управления цифровым AGC также управляет способностью следования усиления в модуле 21 цифрового AGC.
Например, модуль 26 управления цифровым AGC управляет способностью следования усиления в модуле 21 цифрового AGC путем установки такой временной константы для MISO, чтобы сделать способность следования усиления меньше, чем при заданной временной константе в модуле 21 цифрового AGC. В случае, когда временная константа для MISO поступает от модуля 26 управления цифровым AGC, модуль 21 цифрового AGC управляет усилением, в соответствии с временной константой для MISO, вместо заданной временной константы.
В соответствии с этим, даже когда появляется несбалансированность мощности из-за передачи данных MISO, усилением можно управлять так, чтобы оно не следовало несбалансированности мощности, и вариации мощности сигналов, выводимых модулем 21 цифрового AGC, могут быть уменьшены.
Модуль 26 управления цифровым AGC также выводит флаг остановки AGC, когда сигналы SP, имеющие меньшую общую сумму мощности между сигналами Sum SP и сигналами DiffSP, вводят в модуль 21 цифрового AGC, и, таким образом, останавливает управление усилением. Таким образом, управляют способностью следования усиления в модуле 21 цифрового AGC. Время, в которое сигнал SP, имеющий меньшую общую сумму мощности, вводят в модуль 21 цифрового AGC, определяют на основе количества символов, подаваемых от модуля 25 оценки характеристик канала.
В случае, когда флаг остановки AGC поступает от модуля 26 управления цифровым AGC, модуль 21 цифрового AGC останавливает управление усилением в течение периода, в который вводят сигнал SP, имеющий меньшую общую сумму мощности. В то время, когда управление усилением остановлено, управление мощностью может быть остановлено, или управление мощностью может продолжаться путем использования усиления, полученного непосредственно перед остановкой управления усилением.
В соответствии с этим, даже когда возникает несбалансированность мощности из-за передачи данных MISO, можно предотвратить следование усиления несбалансированности мощности в течение периода, в который вводят сигнал SP, имеющий меньшую общую сумму мощности, и вариации мощности сигналов OFDM в области времени могут быть уменьшены. В качестве альтернативы, управление усилением может быть остановлено в течение периода, в который вводят сигнал SP, имеющий большую общую сумму мощности.
По мере того, как вариации мощности сигналов OFDM уменьшаются, при управлении способностью следования усиления описанным выше образом, ухудшение характеристик приема, из-за передачи данных MISO, может быть предотвращено, и характеристики приема могут быть улучшены.
Модуль 27 эквалайзера выполняет выравнивание сигналов OFDM в области частоты, используя характеристики канала, оцененные модулем 25 оценки характеристик канала для каждой несущей, и выводит выровненные сигналы OFDM на модуль 28 переключения сигнала.
В случае, когда флаг MISO подают из модуля 24 обнаружения P1/интерпретации сигналов, или когда способ передачи данных представляет собой MISO, модуль 28 переключения сигнала выводит сигналы, подаваемые декодером 23 Аламоути, на модуль коррекции ошибок (не показан). В случае, когда флаг MISO не поступает от модуля 24 обнаружения P1/интерпретации сигналов, или когда способ передачи данных представляет собой SISO, модуль 28 переключения сигнала выводит сигналы, подаваемые от модуля 27 эквалайзера, на модуль коррекции ошибок (не показан).
Операции устройства приема
Операции устройства приема будут описаны ниже. Операцию на каждом этапе выполняют параллельно с операцией другого этапа или выполняют перед или после операции другого этапа, соответственно.
Рассмотрим вначале блок-схему последовательности операций, показанную на фиг.7, будет описана операция, выполняемая для управления способностью следования усиления, когда флаг MISO подан от модуля 24 обнаружения P1/интерпретации сигналов.
На этапе S1, модуль 21 цифрового AGC регулирует усиление в соответствии с заданной временной константой и регулирует мощность входных сигналов OFDM.
На этапе S2, модуль 24 обнаружения P1/интерпретации сигналов обнаруживает символ P1.
На этапе S3, модуль 24 обнаружения P1/интерпретации сигналов декодирует сигналы P1, переданные через символ P1.
На этапе S4, модуль 24 обнаружения P1/интерпретации сигналов определяет, является ли способ передачи данных MISO, на основе информации, содержащейся в сигналах P1.
Если определяют, что способ передачи данных представляет собой MISO на этапе S4, модуль 24 обнаружения P1 /интерпретации сигналов выводит флаг MISO на модуль 26 управления цифровым AGC на этапе S5.
На этапе S6, модуль 26 управления цифровым AGC выполняет операцию управления способностью следования. Операция управления способностью следования будет описана ниже, со ссылкой на блок-схемы последовательности операций, представленные на фиг.7 и 8.
На этапе S7, модуль 21 цифрового AGC управляет усилением под управлением модуля 26 управления цифрового AGC, и выводит сигналы OFDM в области времени, с отрегулированной мощностью, на модуль 22 операций FFT.
На этапе S8, модуль 22 операций FFT выполняет операцию FFT для сигналов OFDM в области времени, переданных от модуля 21 цифрового AGC.
На этапе S9, на основе сигналов SP, содержащихся в сигналах OFDM в области частоты, подаваемых от модуля 22 операций FFT, модуль 25 оценки характеристик канала выполняет оценку характеристик канала соответствующих несущих сигналов OFDM в канале передачи Tx1-Rx1 и в канале передачи Tx2-Rx1.
На этапе S10, декодер 23 Аламоути выполняет декодирование Аламоути, используя характеристики канала, оценка которых была получена модулем 25 оценки характеристик канала, и выполняет выравнивание сигналов OFDM в области частоты. Декодер 23 Аламоути выводит выровненные сигналы OFDM. Выровненный сигнал OFDM, выводимый от декодера 23 Аламоути, выбирают с помощью модуля 28 переключения сигнала и выводят на модуль коррекции ошибок. Операция затем подходит к концу.
Если будет определено, что способ передачи данных не является MISO, но представляет собой SISO, на этапе S4, с другой стороны, соответствующие компоненты модуля 11 обработки сигналов выполняют обычную операцию демодуляции на этапе S11. В частности, модуль 21 цифрового AGC управляет усилением, в соответствии с заданной временной константой, и модуль 22 операций FFT выполняет операцию FFT для сигналов OFDM в области времени, с отрегулированной мощностью. Модуль 25 оценки характеристик канала выполняет оценку характеристик канала на основе сигналов SP, содержащихся в сигналах OFDM в области частоты, и модуль 27 эквалайзера выполняет выравнивание сигналов OFDM в области частоты, используя оценку характеристик канала. Выровненные сигналы OFDM, выводимые модулем 27 эквалайзера, выбирают с помощью модуля 28 переключения сигнала, и выводят на модуль коррекции ошибок.
Обращаясь теперь к блок-схеме последовательности операций, показанной на фиг.8, будет описана первая операция управления способностью следования, которая должна быть выполнена на этапе S6 по фиг.7. Операция, показанная на фиг.8, представляет собой операцию управления способностью следования усиления, путем установки временной константы для MISO.
На этапе S21, модуль 26 управления цифрового AGC устанавливает такую временную константу для MISO в модуле 21 цифрового AGC с тем, чтобы сделать способность следования усиления ниже, чем при заданной временной константе. После этого выполняются процедуры на этапе S6 и далее на фиг.7, и модуль 21 цифрового AGC управляет усилением в соответствии с временной константой для MISO на этапе S7.
Обращаясь теперь к блок-схеме последовательности операций, показанной на фиг.9, будет описана вторая операция по управлению способностью следования на этапе S6 по фиг.7. Операция, показанная на фиг.9, представляет собой операцию по управлению способностью следования усиления, путем остановки управления усилением.
На этапе S31, модуль 25 оценки характеристик канала подсчитывает количество символов сигналов SP, и выводит информацию о количестве символов на модуль 26 управления цифрового AGC.
На этапе S32, модуль 25 оценки характеристики канала вычисляет общую сумму мощности сигналов Sum SP и общую сумму мощности сигналов Diff SP, и определяет, какой сигнал SP между сигналами Sum SP и сигналами Diff SP, имеет меньшую общую сумму мощности. Модуль 25 оценки характеристик канала выводит информацию, указывающую сигналы SP с меньшей общей суммой мощности, на модуль 26 управления цифрового AGC.
На этапе S33, модуль 26 управления цифрового AGC определяет, является ли текущее время моментом времени для ввода сигналов SP с меньшей общей суммой мощности на модуль 21 цифрового AGC.
Если определяют, что текущее время представляет собой момент времени для ввода сигналов SP с меньшей общей суммой мощности на модуль 21 цифрового AGC на этапе S33, модуль 26 управления цифрового AGC выводит флаг остановки AGC на модуль 21 цифрового AGC на этапе S34, и заканчивает операцию. После этого выполняют процедуры этапа S6 и далее на фиг.7, в ответ на подачу флага остановки AGC, модуль 21 цифрового AGC останавливает управление усилением на этапе S7, в то время как вводят сигналы SP с меньшей общей суммой мощности.
Если определяют, что текущее время не является моментом времени для ввода сигналов SP с меньшей общей суммой мощности на модуль 21 цифрового AGC на этапе S33, этап S34 пропускают, и модуль 26 управления цифрового AGC заканчивает работу. После этого выполняют процедуры этапа S6 и далее на фиг.7, и модуль 21 цифрового AGC управляет усилением в соответствии с заданной временной константой на этапе S7.
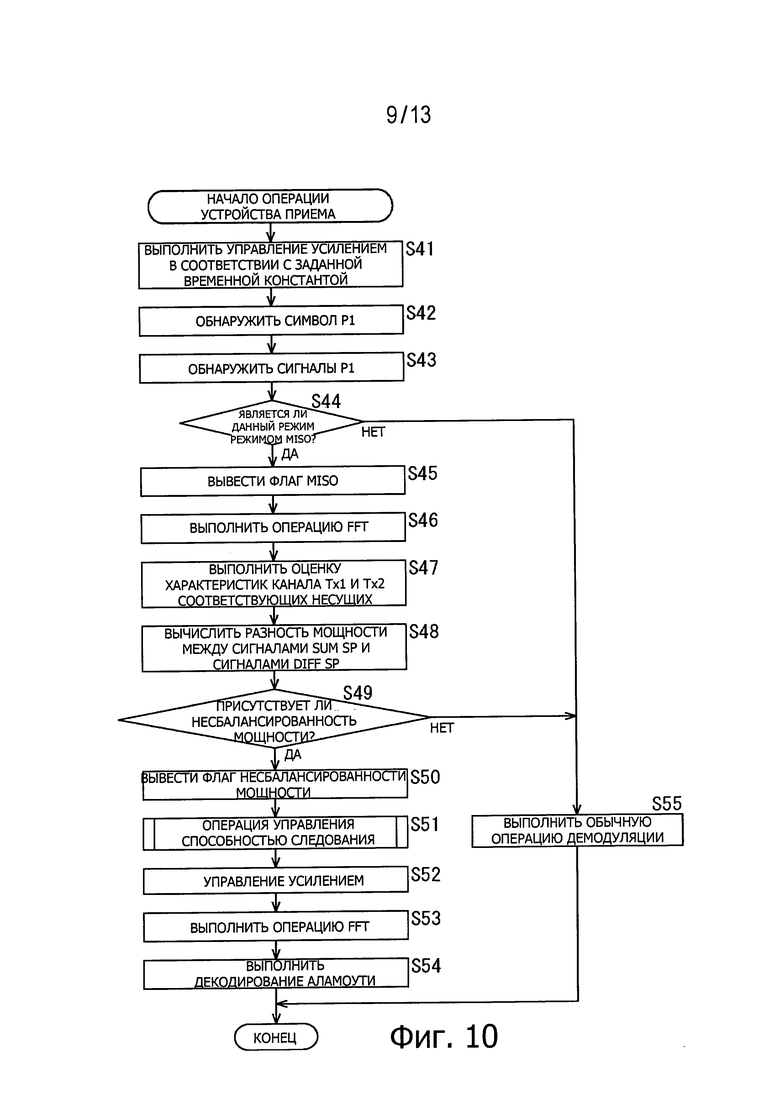
Обращаясь теперь к блок-схеме последовательности операций, показанной на фиг.10, будет описана операция, предназначенная для управления способностью следования усиления, когда флаг MISO подают от модуля 24 обнаружения Р1/интерпретации сигналов, и флаг обнаружения несбалансированности мощности подают от модуля 25 оценки характеристик канала.
Процедуры на этапах S41-S45 на фиг.10 являются такими же, как и процедуры на этапах S1-S5 по фиг.7. В частности, на этапе S41, модуль 21 цифрового AGC управляет усилением в соответствии с заданной временной константой и регулирует мощность подаваемых сигналов OFDM.
На этапе S42, модуль 24 обнаружения Р1/интерпретации сигналов обнаруживает символ Р1.
На этапе S43 модуль 24 обнаружения Р1/интерпретации сигналов декодирует сигналы Р1, переданные через символ Р1.
На этапе S44, модуль 24 обнаружения P1/интерпретации сигналов определяет, является ли способ передачи данных MISO основанным на информации, содержащейся в сигналах Р1.
Если определяют, что способ передачи данных представляет собой MISO на этапе S44, модуль 24 обнаружения Р1/интерпретации сигналов выводит флаг MISO на модуль 26 управления цифровым AGC на этапе S45.
На этапе S46, модуль 22 операций FFT выполняет операцию FFT для сигналов OFDM в области времени, передаваемого модулем 21 цифрового AGC.
На этапе S47, на основе сигналов SP, содержащихся в сигналах OFDM в области частотны, подаваемых от модуля 22 операций FFT, модуль 25 оценки характеристик канала выполняет оценку характеристик канала соответствующих несущих сигналов OFDM в канале передачи Tx1-Rx1 и в канале передачи Tx2-Rx1.
На этапе S48 модуль 25 оценки характеристик канала выполняет вычисление разности между мощностью сигналов Sum SP и мощностью сигналов DiffSP.
На этапе S49, на основе разности между мощностью сигналов Sum SP и мощностью сигналов Diff SP, модуль 25 оценки характеристик канала определяет, присутствует ли несбалансированность мощности такая, как описана со ссылкой на фиг.5.
Если несбалансированность мощности обнаруживают на этапе S49, модуль 25 оценки характеристик канала выводит флаг обнаружения несбалансированности мощности на модуль 26 управления цифровым AGC на этапе S50.
На этапе S51, модуль 26 управления цифровым AGC выполняет операцию управления способностью следования. В качестве операции управления способностью следования, выполняют операцию, описанную со ссылкой на блок-схему последовательности операций, представленную на фиг.8, или операцию, описанную со ссылкой на блок-схему последовательности операций, показанную на фиг.9.
На этапе S52, модуль 21 цифрового AGC управляет усилением под управлением модуля 26 управления цифрового AGC, и выводит сигналы OFDM в области времени, с отрегулированной мощностью, на модуль 22 операций FFT.
На этапе S53, модуль 22 операций FFT выполняет операцию FFT для сигналов OFDM в области времени, мощность которых регулировали в соответствии с усилением, при выполнении управления способностью следования, используя операции, показанные на фиг.8 или 9.
На этапе S54, декодер 23 Аламоути выполняет декодирование Аламоути, используя характеристики канала, оценка которых была получена модулем 25 оценки характеристик канала, и выполняет выравнивание для сигналов OFDM в области частоты. Декодер 23 Аламоути выводит выровненные сигналы OFDM. Выровненные сигналы OFDM, выводимые декодером 23 Аламоути, выбирают модулем 28 переключения сигнала, и их выводят на модуль коррекции ошибок. Операция затем подходит к концу.
С другой стороны, если определяют, что способ передачи данных не является MISO, но представляет собой SISO на этапе S44, или если несбалансированность мощности не будет обнаружена на этапе S49, соответствующие компоненты модуля 11 обработки сигналов выполняют обычную операцию демодуляции на этапе S55. Таким образом, если будет определено, что способ передачи данных не является MISO, но представляет собой SISO, на этапе S44, выполняют ту же операцию, что и операция на этапе S11 по фиг.7. Кроме того, если несбалансированность мощности не будет обнаружена на этапе S49, способностью следования усиления не управляют, и демодулируют данные, переданные в соответствии с MISO.
В ходе описанных выше операций, даже когда несбалансированность мощности возникает из-за передачи данных MISO, усилением можно управлять так, чтобы оно не следовало несбалансированности мощности, и вариации мощности сигналов OFDM могут быть уменьшены. Кроме того, может быть предотвращено ухудшение характеристики приема в модуле 11 обработки сигналов.
Модифакации
В представленном выше описании способностью следования усиления управляют с помощью способа управления, используя временную константу для MISO, или способа управления, в соответствии с которым управление усилением останавливают, когда вводят сигналы SP с наименьшей общей суммой мощности. Однако эти два способа управления можно переключать, соответственно.
Например, когда разность между общей суммой мощности сигналов Sum SP и общей суммой мощности сигналов Diff SP меньше, чем пороговое значение, используется прежний способ управления. Когда разность между общей суммой мощности сигналов Sum SP и общей суммой мощности сигналов Diff SP равна или больше, чем пороговое значение, используется последний способ управления. Кроме того, способ для управления способностью следования усиления может изменяться в зависимости от PP.
Примеры применений в системах приема
На фиг.11 показана блок-схема, представляющая пример структуры первого варианта осуществления системы приема, в которой используется модуль 11 обработки сигналов.
Система приема, показанная на фиг.11, включает в себя модуль 101 получения, модуль 102 декодирования канала, и модуль 103 декодирования источника информации.
Модуль 101 получения получает сигналы через канал передачи (не показан) по сети такой, как цифровая наземная сеть широковещательной передачи, цифровая спутниковая сеть широковещательной передачи, сеть CATV или Интернет, и подает эти сигналы на модуль 102 декодирования канала. Модуль 11 обработки сигналов, показанный на фиг.6, включен, например, в модуль 101 получения.
Модуль 102 декодирования канала выполняет операцию декодирования канала, включающую в себя коррекцию ошибок для сигналов, полученных с помощью модуля 101 получения через канал передачи, и подает полученные в результате сигналы в модуль 103 декодирования источника информации.
Модуль 103 декодирования источника информации выполняет операцию декодирования источника информации для сигналов, подвергнутых операции декодирования канала. Операция декодирования источника информации включает в себя операцию для расширения сжатой информации в оригинальную информацию и получения данных, предназначенных для передачи.
В частности, сигналы, полученные модулем 101 получения через канал передачи, могут быть не подвергнуты кодированию сжатия для сжатия информации с тем, чтобы уменьшить количество данных, таких как данные изображения и звука. В таком случае модуль 103 декодирования источника информации выполняет операцию декодирования источника информации, такую как операция по расширению сжатой информации до исходной информации, по сигналам, подвергнутым операции декодирования канала.
В случае, когда сигналы, полученные модулем 101 получения через канал передачи, не были подвергнуты кодированию сжатия, модуль 103 декодирования источника информации не выполняет операцию для расширения сжатой информации в исходную информацию. Здесь операция расширения может представлять собой, например, декодирование MPEG. Операция декодирования источника информации может также включать в себя дескремблирование, а также операцию расширения.
Система приема, показанная на фиг.11, может использоваться в телевизионном тюнере, который принимает, например, цифровые телевизионные широковещательные передачи. Каждый из модуля 101 получения, модуля 102 декодирования канала и модуля 103 декодирования источника информации могут быть сформированы, как одно независимое устройство (аппаратные средства (такие как 1C (интегральная схема)) или программный модуль).
В качестве альтернативы, три модуля такие, как модуль 101 получения, модуль 102 декодирования канала и модуль 103 декодирования источника информации могут быть сформированы, как одно независимое устройство. Модуль 101 получения и модуль 102 декодирования канала также могут быть сформированы, как одно независимое устройство, и модуль 102 декодирования канала, и модуль 103 декодирования источника информации также могут быть сформированы, как одно независимое устройство.
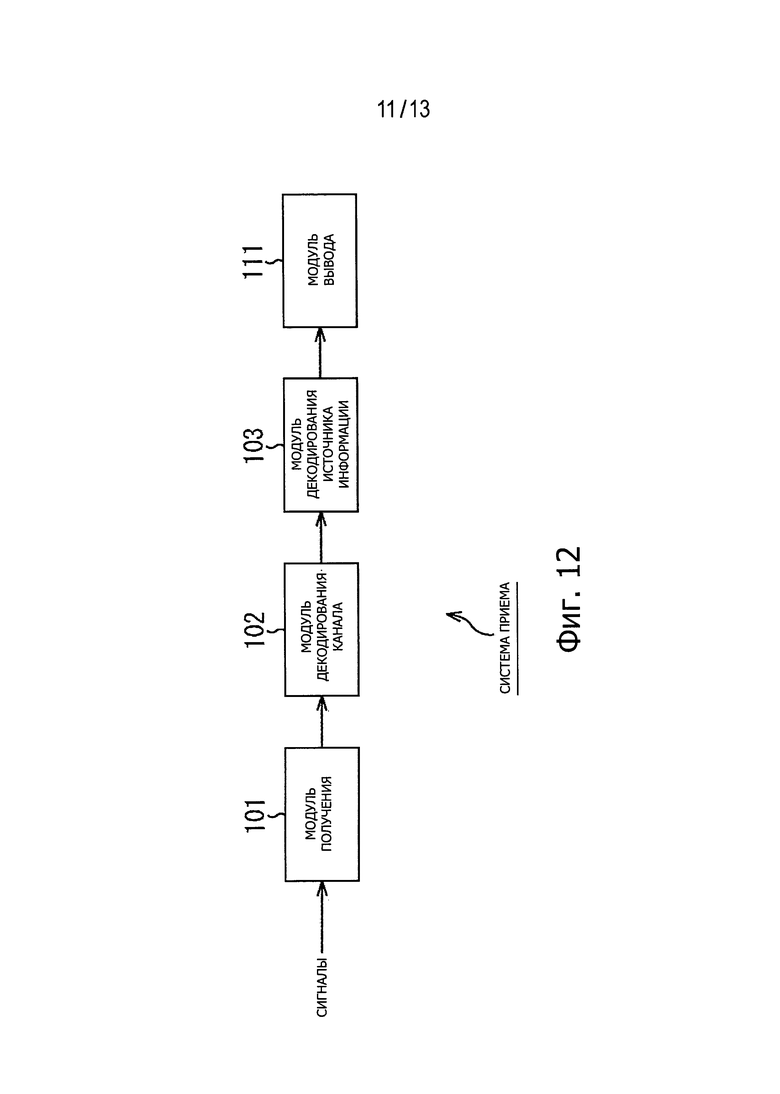
На фиг.12 показана блок-схема, представляющая пример структуры второго варианта осуществления системы приема, в которой используется модуль 11 обработки сигналов.
В структуре, показанной на фиг.12, компоненты, эквивалентные компонентам, показанным на фиг.11, обозначены теми же номерами ссылочных позиций, как и на фиг.11, и их пояснение не будет повторяться.
Структура системы приема, показанная на фиг.12, является такой же, как и структура, показанная на фиг.11, включающаяся в себя модуль 101 получения, модуль 102 декодирования канала и модуль 103 декодирования источника информации, и отличается от структуры, показанной на фиг.11 тем, что дополнительно включает в себя модуль 111 вывода.
Модуль 111 вывода представляет собой устройство, например, устройство отображения, которое отображает изображения или громкоговоритель, который выводит звук. Модуль 111 вывода выводит изображения или звук, как сигналы, которые выводят из модуля 103 декодирования источника информации. Таким образом, модуль 111 вывода отображает изображения или выводит звук.
Система приема, показанная на фиг.12, может использоваться, например, в телевизионном приемнике, который принимает телевизионную широковещательную передачу, как цифровые широковещательные передачи, или в радиоприемнике, который принимает широковещательную передачу радиосигнала.
В случае, когда сигналы, получаемые модулем 101 получения, не были подвергнуты кодированию сжатия, сигналы, которые выводят из модуля 102 декодирования канала, непосредственно подают на модуль 111 вывода.
На фиг.13 показана блок-схема, представляющая пример структуры третьего варианта осуществления системы приема, в котором используется модуль 11 обработки сигналов.
В структуре, показанной на фиг.13, компоненты, эквивалентные компонентам, показанным на фиг.11, обозначены теми же номерами ссылочных позиций, как и на фиг.11, и их пояснение не будет повторяться.
Структура системы приема, показанная на фиг.13, является такой же, как и структура, показанная на фиг.11 в том, что она включает в себя модуль 101 получения и модуль 102 декодирования канала, и отличается от структуры, показанной на фиг.11 тем, что она не включает в себя модуль 103 декодирования источника информации, но дополнительно включает в себя модуль 121 записи.
Модуль 121 записи записывает (сохраняет) сигналы (такие как пакеты TS в MPEG TS), которые выводят модуль 102 декодирования канала, на носитель записи (хранения)), такой как оптический диск, жесткий диск (магнитный диск), или запоминающее устройство типа флэш.
Описанная выше система приема, показанная на фиг.13, может использоваться в устройстве записи и т.п., которое записывает телевизионную широковещательную передачу.
Модуль 103 декодирования источника информации может быть добавлен, и сигналы, подвергаемые операции декодирования источника информации в модуле 103 декодирования источника информации, или данные изображения или звука, полученные путем декодирования, могут быть записаны модулем 121 записи.
Пример структуры компьютера
Описанная выше последовательность операций может быть выполнена аппаратными средствами, и также может выполняться программным обеспечением. В случае, когда последовательности операций выполняются программным обеспечением, программу программного обеспечения устанавливают с носителя записи программы в компьютер, который, например, встроен в аппаратные средства специального назначения, или в персональный компьютер общего назначения.
На фиг.14 показана блок-схема, представляющая пример структуры аппаратных средств компьютера, который выполняет описанную выше последовательность операций, в соответствии с программой.
CPU (центральное процессорное устройство) 151, ROM (постоянное запоминающее устройство) 152, RAM (оперативное запоминающее устройство) 153 соединены друг с другом с помощью шины 154.
Интерфейс 155 ввода-вывода, кроме того, соединен с шиной 154. Модуль 156 ввода, сформированный из клавиатуры, "мыши" и т.п., и модуль 157 вывода, сформированный из устройства отображения, громкоговорителя и т.п., соединены с интерфейсом 155 ввода-вывода. Модуль 158 сохранения, сформированный из жесткого диска, энергонезависимого запоминающего устройства и т.п., модуль 159 связи, сформированный из сетевого интерфейса и т.п., и привод 160, выполняющий привод съемного носителя 161, также соединены с интерфейсом 155 ввода-вывода.
В компьютере, имеющем описанную выше структуру, CPU 151 загружает программу, сохраненную, например, в модуле 158 хранения, в RAM 153 через интерфейс 155 ввода-вывода и шину 154 и выполняет программу, таким образом, что выполняются описанные выше последовательности операций.
Программа, предназначенная для выполнения CPU 151, записана, например, на съемный носитель 161 записи или предоставляется через проводную или беспроводную среду передачи данных, такую как локальная вычислительная сеть, Интернет или цифровая широковещательная передача, и ее устанавливают в модуль 158 хранения.
Программы, предназначенные для исполнения компьютером, могут представлять собой программы для выполнения операций в хронологическом порядке, в соответствии с последовательностью, описанной в этом описании, или могут представлять собой программы для выполнения операций параллельно или выполнения операции, когда необходимо, например, в случае вызова.
Следует отметить, что варианты осуществления настоящей технологии не ограничиваются описанными выше вариантами осуществления и различные модификации могут быть выполнены в отношении них, без выхода за пределы объема настоящей технологии.
Другие модификации
Настоящая технология может также быть предусмотрена в следующих формах.
(1) Устройство приема, включающее в себя:
модуль управления усилением для управления мощностью сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления через разные каналы передачи; и
модуль управления для управления способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных.
(2) Устройство приема по (1), в котором, когда способ передачи данных представляет собой MISO, модуль управления выполнен с возможностью обеспечения следования усиления в соответствии с характеристиками, отличными от характеристик при использовании SISO.
(3) Устройство приема по (1) или (2), в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством изменения параметра, определяющего способность следования усиления.
(4) Устройство приема по (1) или (2), в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством остановки управления усилением, при выводе одного из первого пилотного сигнала и второго пилотного сигнала.
(5) Устройство приема по любому из (1)-(4), в котором
модуль управления усилением выполнен с возможностью управления мощностью сигнала OFDM DVB-T2,
первый пилотный сигнал представляет собой сигнал Sum SP, а
второй пилотный сигнал представляет собой сигнал Diff SP.
(6) Устройство приема по (5), дополнительно включающее в себя
модуль обнаружения, выполненный с возможностью обнаружения символа Р1,
при этом когда способ передачи данных, указанный информацией, содержащейся в символе Р1, представляет собой MISO, модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением.
(7) Устройство приема по (5) или (6), в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством установки параметров так, чтобы вызвать уменьшение способности следования усиления ниже способности следования, достигаемой при способе передачи данных, представляющем собой SISO.
(8) Устройство приема по (5) или (6), дополнительно содержащее
модуль обработки, выполненный с возможностью выделения первого пилотного сигнала и второго пилотного сигнала из сигнала OFDM и определения пилотного сигнала с меньшей мощностью,
при этом модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением, посредством остановки управления усилением, при вводе пилотного сигнала с меньшей мощностью.
(9) Устройство приема по (6), дополнительно содержащее
модуль обработки, выполненный с возможностью вычисления разности между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала,
при этом когда способ передачи данных, указанный информацией, содержащейся в символе Р1, представляет собой MISO, и разность между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала равна или более порогового значения, модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением.
(10) Устройство приема по (9), в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением, посредством установки параметров так, чтобы вызвать понижение способности следования усиления ниже способности следования, достигаемой при способе передачи данных, представляющем собой SISO.
(11) Устройство приема по (9), в котором
модуль обработки дополнительно выполнен с возможностью определения одного из первого пилотного сигнала и второго пилотного сигнала, имеющего меньшую мощность, и
модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством остановки управления усилением, при вводе пилотного сигнала с меньшей мощностью.
(12) Способ приема, включающий в себя следующие этапы, на которых:
регулируют мощность сигнала, включающего в себя первый пилотный сигнал, передаваемый, в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления, через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления, через разные каналы передачи с использованием модуля управления усилением; и
управляют способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных.
(13) Программа, вызывающая выполнение компьютером функционирования, включающего в себя этапы, на которых:
регулируют мощность сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления, через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления, через разные каналы передачи с использованием модуля управления усилением; и
управляют способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных.
Список номеров ссылочных позиций
11 модуль обработки сигналов, 21 модуль цифрового AGC, 22 модуль операции FFT, 23 декодер Аламоути, 24 модуль обнаружения Р1/интерпретации сигналов, 25 модуль оценки характеристик канала, 26 управления цифровым AGC








Изобретение относится к технике связи и может использоваться в системах щирокополосной связи. Технический результат состоит в повышении надежности приема путем улучшения характеристик приема. Для этого устройство приема включает в себя модуль управления усилением для регулировки мощности сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления через разные каналы передачи; и модуль управления для управления способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных. 3 н. и 9 з.п. ф-лы, 14 ил.
1. Устройство приема, содержащее:
модуль управления усилением, выполненный с возможностью регулировки мощности сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления через разные каналы передачи; и
модуль управления, выполненный с возможностью управления способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных, при этом способность следования усиления является способностью следования несбалансированности мощности, а модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством остановки управления усилением при вводе первого пилотного сигнала или второго пилотного сигнала.
2. Устройство приема по п. 1, в котором, когда способ передачи данных представляет собой MISO (множество входов, один выход), модуль управления выполнен с возможностью обеспечения следования усиления характеристикам, отличным от характеристик при использовании SISO (один вход, один выход).
3. Устройство приема по п. 1, в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством изменения параметра, определяющего способность следования усиления.
4. Устройство приема по п. 1, в котором
модуль управления усилением выполнен с возможностью регулировки мощности сигнала OFDM DVB-T2,
указанный первый пилотный сигнал представляет собой сигнал Sum SP, являющийся сигналом SP (сигнальная обработка) для символа, имеющего четный номер, выделенный для него; а
указанный второй пилотный сигнал представляет собой сигнал Diff SP, являющийся сигналом SP (сигнальная обработка) для символа, имеющего нечетный номер, выделенный для него.
5. Устройство приема по п. 4, дополнительно содержащее
модуль обнаружения, выполненный с возможностью обнаружения символа P1, являющегося символом для передачи P1 сигнализации,
при этом модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением при указании информацией, содержащейся в P1, что способ передачи данных представляет собой MISO.
6. Устройство приема по п. 5, в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством установки параметров так, чтобы сделать способность следования усиления меньше, чем способность следования, достигаемая при способе передачи данных SISO.
7. Устройство приема по п. 5, дополнительно содержащее
модуль обработки, выполненный с возможностью выделения первого пилотного сигнала и второго пилотного сигнала из сигнала OFDM и определения пилотного сигнала из первого пилотного сигнала и второго пилотного сигнала, имеющего наименьшую мощность,
при этом модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством остановки управления усилением при вводе пилотного сигнала с меньшей мощностью.
8. Устройство приема по п. 5, дополнительно содержащее
модуль обработки, выполненный с возможностью вычисления разности между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала,
при этом модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением при указании информацией, содержащейся в символе P1, что способ передачи данных представляет собой MISO, и при разности между мощностью первого пилотного сигнала и мощностью второго пилотного сигнала равной или большей порогового значения.
9. Устройство приема по п. 8, в котором модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством установки параметров так, чтобы сделать способность следования усиления меньшей, чем способность следования, достигаемая при способе передачи данных SISO.
10. Устройство приема по п. 8, в котором
модуль обработки, дополнительно, выполнен с возможностью определения пилотного сигнала из первого пилотного сигнала и второго пилотного сигнала, имеющего наименьшую мощность, а
модуль управления выполнен с возможностью управления способностью следования усиления в модуле управления усилением посредством остановки управления усилением при вводе пилотного сигнала с меньшей мощностью.
11. Способ приема, содержащий этапы, на которых:
регулируют с помощью модуля управления усилением мощность сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления, через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления, через разные каналы передачи; и
управляют способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных, при этом способность следования усиления является способностью следования несбалансированности мощности, а этап управления содержит подэтап, на котором останавливают управление усилением при вводе первого пилотного сигнала или второго пилотного сигнала.
12. Носитель записи программы, хранящий программу, вызывающую выполнение компьютером функционирования, содержащего этапы, на которых:
регулируют с помощью модуля управления усилением мощность сигнала, включающего в себя первый пилотный сигнал, передаваемый в качестве сигналов, имеющих высокую корреляцию в отношении полярного направления, через разные каналы передачи, и второй пилотный сигнал, передаваемый в качестве сигналов, имеющих низкую корреляцию в отношении полярного направления, через разные каналы передачи; и
управляют способностью следования усиления в модуле управления усилением в соответствии со способом передачи данных, при этом способность следования усиления является способностью следования несбалансированности мощности, а этап управления содержит подэтап, на котором останавливают управление усилением при вводе первого пилотного сигнала или второго пилотного сигнала.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ В СИСТЕМЕ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192709C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ЭНЕРГОХОЛОДИЛЬНАЯ СИСТЕМА "СТИРЛИНГ-СТИРЛИНГ" ДЛЯ МОБИЛЬНЫХ КОМПЛЕКСОВ | 2004 |
|
RU2259516C1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

