Изобретение относится к имплантируемым ограничительным устройствам и, в частности, к способам и устройствам для управления давлением текучей среды в ограничительной системе.
Ожирение вызывает все большее беспокойство, в особенности в США, поскольку число тучных людей продолжает расти, и имеется все больше информации о негативном влиянии ожирения на здоровье. Патологическое ожирение, при котором вес человека на 100 и более фунтов превышает идеальную массу тела, в особенности представляет существенный риск возникновения серьезных проблем со здоровьем. Соответственно, на лечение тучных пациентов сейчас обращено много внимания. Один из способов лечения патологического ожирения заключается в размещении ограничительного устройства, такого как удлиненный бандаж, на верхнем участке желудка. Желудочные бандажи обычно содержат наполняемый текучей средой эластичный баллон с фиксированными концевыми точками, который охватывает желудок непосредственно ниже места соединения желудка с пищеводом с образованием малого изолированного желудочка над бандажом и сужения просвета в желудке. Когда текучая среда вводится в баллон, бандаж расширяется относительно желудка, создавая ограничение в приеме пищи или просвета в желудке. Для снижения этого ограничения текучая среда выводится из бандажа. Эффект бандажа заключается в снижении доступного объема желудка, а следовательно, количества пищи, которое может быть поглощено до наступления «сытости».
С использованием каждого их вышеописанных устройств для ограничения приема пищи безопасное и эффективное лечение требует, чтобы устройство систематически подвергалось контролю и регулировке для изменения степени ограничения/ налагаемого на желудок. С использованием бандажных устройств изолированный желудочек над бандажом существенно увеличится в размере после первичной имплантации. В соответствии с этим, просвет желудка должен первоначально быть выполнен достаточно большим, чтобы позволить пациенту получать адекватное питание,, пока желудок адаптируется к бандажному устройству. Когда изолированный желудочек увеличивается в размере, бандаж может быть отрегулирован для изменения размера желудка. Кроме того, желательно изменять размер просвета для приспосабливания к изменениям в теле пациента или режиме лечения, или, в более острых случаях, для облегчения непроходимости, или при серьезной дилатации пищевода. Обычно регулирование гидравлического желудочного бандажа требует запланированного посещения практикующего врача, в ходе которого используются игла Хьюбера и шприц для проникновения в кожу пациента и добавления текучей среды в баллон или удаления текучей среды из него через порт для ввода. Позднее были разработаны имплантируемые помпы, обеспечивающие неинвазивное регулирование бандажа. Внешнее программное устройство обменивается информацией с имплантированной помпой посредством телеметрии для управления помпой. В ходе запланированного посещения врач помещает удерживаемый в руке узел программного устройства рядом с желудочным имплантатом и осуществляет передачу мощности и сигналов управления на имплантат. Имплантат, в свою очередь, регулирует содержание текучей среды в бандаже и передает ответный сигнал управления на программное устройство. При том, что такие помпы могут быть эффективны, для их работы требуется питание, что заставляет пациентов посещать врачей, чтобы помпы правильно эксплуатировались и поддерживались в рабочем состоянии.
Соответственно, остается потребность в способах и устройствах для регулирования гидравлической ограничительной системы, а в особенности, скорости потока текучей среды между ограничительным устройством и источником текучей среды, предпочтительно без использования питания для их функционирования.
Настоящее изобретение, в общем, обеспечивает способы и устройства для регулирования гидравлической ограничительной системы. В одном варианте осуществления обеспечивается ограничительная система для образования ограничения у пациента, которая включает в себя имплантируемое ограничительное устройство, выполненное с возможностью ограничения в проходе как функции объема текучей среды, содержащейся в ограничительном устройстве. Система также включает в себя регулируемый механизм для управления потоком, находящийся в связи по текучей среде с ограничительным устройством и выполненный с возможностью ограничения скорости потока текучей среды к ограничительному устройству и от него.
В одном варианте осуществления регулируемый механизм для управления потоком может иметь геометрию, определяющую скорость потока текучей среды к ограничительному устройству и от него. Механизм для управления потоком может быть регулируемым между множеством фиксированных положений так, что увеличение геометрического объема приводит к увеличению скорости потока текучей среды, а уменьшение геометрического объема - к снижению скорости потока текучей среды. Регулирование геометрии механизма для управления текучей средой может осуществляться, например, путем линейного перемещения. В некоторых вариантах осуществления геометрия определяет скорость потока текучей среды между ограничительным устройством и резервуаром для текучей среды, включенным в систему.
Механизм для управления потоком может иметь различную конструкцию. Например, механизм для управления потоком может включать в себя гибкую трубку, расположенную в корпусе и находящуюся в связи по текучей среде с ограничительным устройством. Геометрию гибкой трубки можно регулировать, изменяя количество текучей среды в корпусе. В некоторых вариантах осуществления корпус находится в связи по текучей среде с имплантируемым портом, и количество текучей среды в пределах корпуса можно изменять через порт. В качестве другого примера, механизм для управления потоком может включать в себя проход, находящийся в связи по текучей среде с ограничительным устройством, где геометрия прохода выполнена с возможностью регулирования путем регулировки количественного механизма для создания преграды в проходе. В качестве еще одного примера, механизм для управления потоком может включать в себя пористую мембрану.
В других аспектах механизм для управления потоком может содержать в себе пористую мембрану, расположенную в пределах заполненного текучей средой корпуса. Текучая среда в корпусе может обеспечивать возможность регулирования скорости перемещения пористого элемента через корпус, регулируя тем самым скорость потока текучей среды к ограничительному устройству и от него. В примере осуществления пористый элемент соединен с источником текучей среды, находящимся в связи по текучей среде с ограничительным устройством так, что перемещение пористого элемента через заполненный текучей средой корпус эффективно приводит к перетеканию текучей среды между источником текучей среды и ограничительным устройством. Механизм для управления потоком можно регулировать путем регулирования вязкости текучей среды в заполненном текучей средой корпусе и/или изменяя смещающее усилие механизма для смещения, соединенного с пористым элементом.
В другом варианте осуществления ограничительная система включает в себя имплантируемое ограничительное устройство, которое может содержать текучая среда и образовывать ограничение в проходе, соответствующее количеству текучей среды в ограничительном устройстве. Источник текучей среды может находиться в связи по текучей среде с ограничительным устройством для приема текучей среды от ограничительного устройства для уменьшения ограничения, а также для передачи текучей среды в ограничительное устройство для увеличения ограничения. Система может дополнительно включать в себя регулируемый механизм для управления потоком, размещенный между ограничительным устройством и источником текучей среды, который может регулировать скорость потока текучей среды между источником текучей среды и ограничительным устройством.
Механизм для управления потоком может иметь различную конструкцию. Например, механизм для управления потоком может иметь диаметр, который регулируется, по меньшей мере, между двумя положениями для регулирования скорости потока текучей среды. Увеличение диаметра может увеличить скорость потока текучей среды, а уменьшение диаметра может уменьшить скорость потока текучей среды. В качестве другого примера, механизм для управления потоком может включать в себя гибкую трубку, размещенную в корпусе и имеющую диаметр, который определяет скорость потока текучей среды. Диаметр гибкой трубки можно регулировать путем изменения количества текучей среды в пределах корпуса. В некоторых вариантах осуществления корпус может находиться в связи по текучей среде с имплантируемым портом, и количество текучей среды в пределах корпуса может изменяться через порт. В качестве еще одного примера, механизм для управления потоком может включать в себя пористую мембрану.
Источник текучей среды также может иметь различную конструкцию. Например, источник текучей среды может включать в себя резервуар для текучей среды под давлением, а фиксированный диаметр механизма для управления потоком может определять скорость потока текучей среды между резервуаром для текучей среды под давлением и ограничительным устройством. Текучая среда может перетекать со скоростью, определяемой фиксированным диаметром механизма для управления потоком, от ограничительного устройства через механизм для управления потоком в резервуар для текучей среды, когда давление в ограничительном устройстве превышает давление в резервуаре для текучей среды. Резервуар для текучей среды под давлением также может иметь различную конструкцию. В некоторых вариантах осуществления резервуар для текучей среды под давлением включает в себя полость, находящуюся в связи по текучей среде с механизмом для управления потоком, а также механизм, выполненный с возможностью приложения смещающего усилия к текучей среды в полости.
В других аспектах обеспечивается способ образования ограничения у пациента. Способ включает имплантацию ограничительного устройства для образования ограничения в проходе, которое соответствует объему текучей среды в ограничительном устройстве. Ограничительное устройство принимает текучая среда от источника текучей среды и передает текучая среда источнику текучей среды со скоростью потока, определяемой диаметром механизма для управления потоком, который находится в связи по текучей среде с ограничительным устройством и источником текучей среды и размещен между ними. Геометрию механизма для управления потоком можно регулировать для регулировки скорости потока. Увеличение геометрических размеров может увеличить скорость потока, а уменьшение геометрических размеров может уменьшить скорость потока. В некоторых вариантах осуществления механизм для управления потоком может включать в себя гибкую трубку, размещенную в полости для текучей среды, геометрию же гибкой трубки можно регулировать путем изменения количества текучей среды в пределах полости для текучей среды.
Изобретение можно будет более полно уяснить из последующего подробного описания в сочетании с прилагаемыми чертежами, где:
на фиг.1А схематично представлен вариант осуществления системы для ограничения приема пищи;
на фиг.1В показан схематичный вид в перспективе системы для ограничения приема пищи, представленной на фиг.1А;
на фиг.2А показан вид в перспективе желудочного бандажа ограничительного устройства для приема пищи, представленного на фиг.1А;
на фиг.2В показана схема желудочного бандажа, представленного на фиг.2А, накладываемого около места соединения желудка и пищевода пациента;
на фиг.3А показана схема одного варианта осуществления источника текучей среды, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1В;
на фиг.3В показана схема другого варианта осуществления источника текучей среды, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1В;
на фиг.3С показана схема еще одного варианта осуществления источника текучей среды, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1В;
на фиг.3D показана схема еще одного варианта осуществления источника текучей среды, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1В;
на фиг.4 показан вид в перспективе одного варианта осуществления корпуса порта для ввода системы для ограничения приема пищи, представленной на фиг.1В;
на фиг.5 показана схема одного варианта осуществления механизма для управления потоком, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1А;
на фиг.6 показан вид в сечении элемента связи по текучей среде механизма для управления потоком, представленного на фиг.5;
на фиг.7 показана схема механизма для управления потоком, представленного на фиг.5, который обладает элементом связи по текучей среде с увеличенным диаметром;
на фиг.8 показана схема механизма для управления потоком, представленного на фиг.5, который обладает элементом связи по текучей среде с уменьшенным диаметром;
на фиг.9 показана схема механизма для управления потоком, представленного на фиг.5, который имеет элемент связи по текучей среде с уменьшенным диаметром и увеличенной длиной;
на фиг.10 показана схема механизма для управления потоком, представленного на фиг.5, который имеет элемент связи по текучей среде с увеличенным диаметром и уменьшенной длиной;
на фиг.11 показан вид в сечении очередного варианта осуществления элемента связи по текучей среде, который может быть включен в механизм для управления потоком, представленный на фиг.5;
на фиг.12 показана схема другого варианта осуществления механизма для управления потоком, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1А;
на фиг.13 показана схема варианта механизма для управления потоком, представленного на фиг.12;
на фиг.14 показана схема еще одного варианта осуществления механизма для управления потоком, который может быть использован в ограничительной системе для приема пищи, представленной на фиг.1А;
на фиг.15 показана расширенная схема механизма для управления потоком, представленного на фиг.14;
на фиг.16 показана схема ограничительной системы для приема пищи в действии на стадии покоя;
на фиг.17 показана схема ограничительной системы для приема пищи, представленной на фиг.16, в действии на стадии приложения усилия, следующей за стадией покоя, представленной на фиг.16;
на фиг.18 показана схема ограничительной системы для приема пищи, представленной на фиг.16, в действии, вслед за стадией приложения усилия, представленной на фиг.17;
на фиг.19А показана схема другой ограничительной системы для приема пищи в действии, а также
на фиг.19 В показана схема варианта ограничительной системы для приема пищи, представленной на фиг.19А.
Теперь будут описаны определенные примеры осуществления для обеспечения полного понимания принципов устройства, функционирования, изготовления и использования устройств и способов, раскрытых в настоящем описании. Один или несколько примеров этих вариантов осуществления показаны на прилагаемых чертежах. Специалисты в данной области техники поймут, что устройства и способы, описанные именно здесь и показанные на прилагаемых чертежах, не являются ограничивающими примерами осуществления, и объем настоящего изобретения определяется исключительно формулой изобретения. Признаки, показанные или описанные в связи с одним примером осуществления, могут быть объединены с признаками других вариантов осуществления. Подобные усовершенствования и изменения предполагается включить в объем настоящего изобретения.
Настоящее изобретение в целом обеспечивает способы и устройства для регулирования гидравлической ограничительной системы. В общем случае, способы и устройства могут предусматривать неинвазивное управление давлением с использованием механизма для управления потоком, размещенным между имплантируемым ограничительным устройством и источником текучей среды. Механизм для управления потоком может включать в себя регулируемый элемент связи по текучей среде, который находится в связи по текучей среде с ограничительным устройством и источником текучей среды. В определенных вариантах осуществления геометрия элемента связи по текучей среде может управлять скоростью потока текучей среды между ограничительным устройством и источником текучей среды, тем самым также регулируя скорость, с которой изменяется давление текучей среды в пределах ограничительного устройства. Использование механизма для управления потоком может обеспечить управляемое по времени регулирование давления текучей среды в регулирующем устройстве, т.к. чем больше геометрические размеры элемента связи по текучей среде, тем с большей скоростью текучая среда может перетекать между ограничительным устройством и источником текучей среды, в то время как чем меньше геометрические размеры элемента связи по текучей среде, тем медленнее текучая среда может перетекать между ограничительным устройством и источником текучей среды. Другими словами, механизм для управления потоком может обеспечить управляемое по задержке регулирование давления текучей среды в ограничительном устройстве, которое может быть выполнено с возможностью более быстрого реагирования (например, при больших геометрических размерах) или более медленного реагирования (например, при меньших геометрических размерах) по меньшей мере на один параметр функционирования ограничительного устройства или физиологический параметр пациента, который изменяется как функция приема пищи или иного физиологического состояния пациента. Таким образом, механизм для управления потоком может обеспечить более высокое постоянство давления в пределах ограничительного устройства с течением времени. Поскольку механизм для управления потоком может предотвратить немедленное перетекание текучей среды в ограничительное устройство или из него, временные или преходящие изменения в ограничительном устройстве и/или пациенте (например, увеличение давления в ограничительном устройстве при приеме пищи из-за наличия продуктов питания и перистальтических волн при проглатывании) не приведут в обязательном порядке к значительному увеличению или уменьшению текучей среды в ограничительном устройстве, до того как временные или преходящие изменения уменьшат или прекратят свое влияние. В других вариантах осуществления механизм для смещения, такой как заполненный текучей средой корпус для ограничения перемещения привода для приведения в движение текучей среды между источником текучей среды и ограничительным устройством и/или пружина, соединенная с приводом, может управлять скоростью потока текучей среды между ограничительным устройством и источником текучей среды. Использование механизма для управления потоком может также механически регулировать скорость изменения давления ограничительного устройства без использования электрических элементов, которые могут требовать питание для работы на продолжительных отрезках времени.
В то время как настоящее изобретение может быть использовано с различными ограничительными системами, известными на данном уровне техники, в примере осуществления устройства и способы используются с ограничительным устройством для желудка. При том, что известны различные типы ограничительных устройств для желудка, в том числе электрические, механические и/или устройства на основе текучей среды, с целью ссылки устройства и способы, раскрытые в настоящем описании, обсуждаются в связи с различными вариантами осуществления желудочного ограничительного устройства на основе текучей среды, как раскрыто в общедоступной публикации U.S. Publication №2006/0211913, автор Dlugos и др. (далее «Dlugos»), зарегистрированной 7 марта 2006 г. од заглавием «Non-Invasive Pressure Measurement In A Fluid Adjustable Restrictive Device», которая включена в настоящее описание путем ссылки во всей своей полноте. Специалист в данной области техники признает, что способы и устройства, раскрытые в настоящем описании, не предполагают ограничений в использовании с любым конкретным ограничительным устройством.
На фиг.1А, 1В показан один вариант осуществления имплантируемой ограничительной системы 100. Как показано, имплантируемая ограничительная система 100 обычно включает в себя ограничительное устройство, например, регулируемый желудочный бандаж 120, которое выполнено с возможностью размещения вокруг верхнего участка желудка 140 пациента, чтобы принимать текучая среда и создавать ограничение в проходе, соответствующее количеству текучей среды, содержащейся в нем. Ограничительная система 100 также включает в себя механизм 130 для управления давлением и механизм 160 для управления потоком текучей среды, который имеет соединение по текучей среде, например, посредством катетера 150 (который может быть образован из одного или нескольких компонентов), между бандажом 120 и механизмом 130 для управления давлением. Механизм 130 для управления давлением выполнен с возможностью управления поступлением текучей среды в один или несколько элементов, а также выведением текучей среды из одного или нескольких элементов, включенных в состав ограничительной системы 100, чтобы, тем самым, регулировать размер бандажа 120, а, следовательно, и давление, прилагаемое к желудку 140. Механизм 160 для управления потоком текучей среды выполнен с возможностью регулирования скорости потока текучей среды между механизмом 130 для управления давлением и бандажом 120, тем самым, регулируя скорость изменения давления. Хотя механизм 160 для управления потоком текучей среды может быть размещен в любом месте для управления скоростью поступления текучей среды в бандаж 120 и из него, в показанном варианте осуществления катетер 150 включает в себя первый участок, который присоединен между бандажом 120 и механизмом 160 для управления потоком текучей среды, а также второй участок, который присоединен между механизмом 160 для управления потоком текучей среды и механизмом 130 для управления давлением. Возможны различные схемы, в том числе схемы, в которых один или несколько дополнительных элементов имеют соединение по текучей среде между бандажом 120, механизмом 130 для управления давлением и механизмом 160 для управления потоком текучей среды, или любым из них, а также любая известная ограничительная система или устройство могут быть использованы с настоящим изобретением.
На фиг.2А показан желудочный бандаж 120 более подробно. В то время как желудочный бандаж 120 имеет различную конструкцию, и различные желудочные бандажи, известные на данном уровне техники, могут быть использованы с настоящим изобретением, в представленном варианте осуществления желудочный бандаж 120 имеет в общем вытянутую форму с опорной конструкцией 122, имеющей первый и второй противоположные концы 120а, 120b, которая может образовывать петлю так, чтобы концы крепились друг к другу. Для крепления концов 120а, 120b друг к другу могут быть использованы различные технологические приемы сопряжения. В показанном варианте осуществления концы 120а, 120b выполнены в форме ремней, которые сопрягаются между собой путем наложения одного поверх другого. Опорная конструкция может содержаться на одном конце желудочного бандажа 120 и может иметь отверстие, через которое другой конец желудочного бандажа 120 может продеваться для крепления концов друг к другу. Желудочный бандаж 120 может также включать в себя элемент с изменяемым объемом, такой как надувной баллон 124, который расположен или образован на внутренней стороне опорной конструкции 122 и который выполнен с возможностью размещения, примыкая к ткани. Баллон 124 может расширяться или сокращаться в отношении наружной стенки желудка с образованием регулируемого просвета для управляемого ограничения поступления пищи в желудок. Баллон 124 может принимать текучая среда для того, чтобы расшириться, и выпускать текучая среда для того, чтобы сократиться. Количество текучей среды внутри баллона может соответствовать степени ограничения, создаваемого желудочным бандажом 120. Таким образом, регулирование текучей среды в бандаже 120 может быть использовано для управления степенью ограничения, создаваемого желудочным бандажом 120.
Специалист в данной области техники признает, что желудочный бандаж может иметь множество иных вариантов конструкции. Более того, различные способы и устройства, раскрытые здесь, в равной степени могут быть применимы к другим типам надувных бандажей. Например, бандажи используются для лечения недержания кала, как описано в U.S.Pat. №6,461,292, который включен сюда путем ссылки во всей полноте. Бандажи могут также использоваться для лечения недержания мочи, как описано в публикации U.S. Publication №2003/0105385, которая включена сюда путем ссылки во всей полноте. Бандажи могут также использоваться для лечения изжоги и/или кислотного рефлюкса, как раскрыто в U.S. Pat. №6,470,892, который включен сюда путем ссылки во всей полноте. Бандажи могут также использоваться для лечения импотенции, как описано в публикации U.S. Publication №2003/0114729, которая включена сюда путем ссылки во всей полноте.
На фиг.2В показан регулируемый желудочный бандаж 120, наложенный примерно на место соединения желудка с пищеводом пациента. Как показано, бандаж 120 по меньшей мере существенно охватывает верхний участок желудка 140 в окрестности соединения с пищеводом 142 пациента. После имплантации бандажа 120, предпочтительно в опорожненном состоянии, при котором бандаж 120 содержит мало текучей среды или не содержит вовсе, бандаж 120 может быть надут, например, с использованием солевого раствора, для уменьшения размера просвета. Специалист в данной области техники признает, что для регулирования степени ограничения, образуемого бандажом 120, могут быть использованы различные технические приемы, включая те, что описаны ниже.
Ограничительная система 100 возможно также включает в себя один или несколько датчиков для определения одного или нескольких параметров, относящихся к системе 100, такого как давление текучей среды в замкнутой гидросхеме системы 100. Притом что Dlugos раскрывает устройство для замера давления, датчик может представлять собой любое воспринимающее устройство для определения различных параметров в системе 100 или внешних по отношению к системе 100. Воспринимающее устройство также может иметь различную конструкцию, и оно может быть соединено с ограничительной системой 100 или расположено в любом месте в ограничительной системе 100. Помимо определения давления текучей среды в замкнутой системе, давление текучей среды в пределах пищевода 142, желудка 140 или иных полостей тела также может быть определено с использованием датчика, такого как манометр эндоскопического оборудования. В качестве примера, не накладывающего ограничений, такие измерения давления текучей среды могут сравниваться с замерами давления текучей среды в пределах системы 100 до, в течение и/или после регулирования давления в пределах системы 100. Специалисты в данной области техники найдут и другое надлежащее применение замерам давления в пределах пищевода 142, желудка 140 или иных полостей тела. Датчик при желании также может быть выполнен с возможностью измерения различных, других физиологических параметров.
На фиг.1 В показана ограничительная система 100 подробнее. Как показано, механизм 160 для управления потоком текучей среды включает в себя корпус 170 для управления потоком и возможно имплантируемый порт 180 для ввода текучей среды, который находится в связи по текучей среде с корпусом 170 для управления (например, посредством катетера 150). Корпус 170 для управления также находится в связи по текучей среде с бандажом 120 и с источником 132 текучей среды, включенным в состав механизма 130 для управления давлением (например, посредством катетера 150).
Механизм 130 для управления давлением может иметь различную конструкцию. Обычно механизм 130 для управления давлением может быть выполнен с возможностью регулирования давления текучей среды в бандаже 120 путем управления потоком текучей среды между бандажом 120 и источником 132 текучей среды. Механизм 130 для управления давлением может включать в себя источник 132 текучей среды, как показано на фиг.1 В, однако источник 132 текучей среды может быть отдельным элементом, включенным в состав системы 100 за пределами механизма 130 для управления давлением. Один пример осуществления механизма 130 для управления давлением включает в себя логическую систему на струйных элементах, выполненную с возможностью регулирования давления текучей среды в бандаже 120 в ответ на давление текучей среды, действующее на него, такую как логическая система на струйных элементах, раскрытая более подробно в общедоступной публикации U.S. Application №11/965,334 под заглавием «Fluid Logic For Regulating Restriction Devices», зарегистрированной 27 декабря 2007 г., которая включена в настоящее описание путем ссылки во всей полноте. Другой пример осуществления механизма 130 для управления давлением включает в себя механизм для управления переходным давлением, выполненный с возможностью управляемого выпуска текучей среды из источника текучей среды (например, источника 132 текучей среды) в бандаж 120, чтобы способствовать установлению желаемого давления текучей среды в бандаже 120, такой как механизм для управления переходным давлением, раскрытый более подробно в общедоступной публикации U.S. Application №11/965,331 под заглавием «Controlling Pressure In Adjustable Restriction Devices», зарегистрированной 27 декабря 2007 г., которая включена в настоящее описание путем ссылки во всей полноте. Еще один пример осуществления механизма 130 для управления давлением включает в себя механизм для создания по существу постоянного усилия, который выполнен с возможностью установления по существу постоянного давления текучей среды в бандаже 120, где количество текучей среды в бандаже 120 может соответствовать степени ограничения, налагаемого бандажом 120, такой как механизм для создания по существу постоянного усилия, раскрытый более подробно в общедоступной публикации U.S. Application №11/965,322 под заглавием «Constant Force Mechanism For Regulating Restriction Devices», зарегистрированной 27 декабря 2007 г., которая включена в настоящее описание путем ссылки во всей полноте. Специалист в данной области техники признает, что могут быть использованы и другие механизмы для управления давлением в качестве механизма 130 для управления давлением и что, как сказано выше, источник 132 текучей среды может располагаться вне механизма 130 для управления давлением.
Источник 132 текучей среды также может иметь различную конструкцию, как будет дополнительно обсуждаться ниже, а ограничительная система 100 может включать в себя любое количество источников текучей среды. Например, источник 132 текучей среды может включать в себя резервуар с текучей средой под давлением в виде жесткого или гибкого корпуса, соединенного с механизмом 160 для управления потоком текучей среды посредством катетера (например, катетера 150) или иного соединительного звена. Резервуар с текучей средой под давлением может представлять собой резервуар низкого давления, резервуар с поддерживанием постоянного давления, резервуар высокого давления, или их различное сочетание. Давление также может меняться от малого до высокого и т.д. Примеры резервуаров для текучей среды под давлением раскрыты более подробно в ранее упомянутой публикации U.S. Application №11/965,334 под заглавием «Fluid Logic For Regulating Restriction Devices», зарегистрированной 27 декабря 2007 г. В качестве другого примера источник 132 текучей среды может включать в себя тело человека (например, желудок, брюшную полость, легкое, соляной раствор, получаемый посредством осмоса, внутриклеточную текучая среда, кровь и т.д.). Катетер или иной проход может продолжаться от механизма 160 для управления потоком текучей среды до той точки тела, где желательно осуществить забор и/или высвобождение текучей среды. В качестве еще одного примера, источник 132 текучей среды может включать в себя помповую систему (например, поршневую помпу и центробежную помпу), такие как раскрытые более подробно в ранее упомянутой публикации U.S. Application №11/965,331 под заглавием «Controlling Pressure In Adjustable Restriction Devices», зарегистрированной 27 декабря 2007 г. В качестве еще одного примера, источник 132 текучей среды может включать в себя механизм для поддерживания постоянного усилия, такой как раскрытые более подробно в ранее упомянутой публикации U.S. Application №11/965,322 под заглавием «Constant Force Mechanism For Regulating Restriction Devices», зарегистрированной 27 декабря 2007 г. Источник 132 текучей среды может быть также включен или не включен в состав порта 180 или иного схожего порта. Кроме того, если источник 132 текучей среды не размещен в порте, он может находиться или не находиться в связи по текучей среде с портом посредством катетера или иного соединительного звена, для того чтобы позволить текучей среды поступать в источник 132 текучей среды или выводиться из него.
В примере осуществления источник 132 текучей среды может включать в себя по меньшей мере один резервуар с текучей средой под давлением, содержащийся в пределах корпуса. Давление можно создавать с использованием различных технических приемов, известных на данном уровне техники, в том числе различных технических приемов, раскрытых в настоящем описании, которые подробнее будут обсуждаться ниже. Максимальное количество текучей среды, содержащейся в корпусе, может быть достаточным объемом текучей среды для заполнения бандажа 120 и любого соединительного элемента, размещенного между бандажом 120 и источником 132 текучей среды, например, катетера 150, механизма 160 для управления потоком, механизма 130 для управления давлением и пр. Давление P1 текучей среды в источнике 132 текучей среды может быть установлено с возможностью позволить давлению Р2 текучей среды в бандаже 120 находиться на своем максимальном уровне или по существу близком к нему, когда бандаж 120 пребывает в пассивном состоянии (например, когда пациент не ест и не пьет). Давление P1 текучей среды в источнике 132 текучей среды также может быть установлено с возможностью того, чтобы механизм 130 для управления давлением мог позволить текучей среды перетекать из бандажа 120 к источнику 132 текучей среды, когда бандаж 120 не пребывает в пассивном состоянии (например, когда пациент ест или пьет), поскольку давление Р2 в бандаже 120 будет выше, чем давление P1 в источнике 132 текучей среды. Точно так же, когда усилия (например, перистальтические импульсы при проглатывании) перестают воздействовать на бандаж 120, давление Р2 в бандаже 120 может стать ниже давления P1 в источнике 132 текучей среды, и механизм 130 для управления давлением может позволить текучей среды перетекать из источника 132 текучей среды к бандажу 120. Давление P1 в источнике 132 текучей среды может быть фиксированным или регулируемым.
Источник 132 текучей среды может иметь различные форму, размеры и конструкцию. На фиг.3А-3В показаны различные варианты осуществления источника 132 текучей среды. В варианте осуществления, показанном на фиг.3А, источник 300 текучей среды в целом включает в себя корпус 302 (например, жесткий сосуд), имеющий внутреннюю полость, разделенную на две камеры с обратной связью, а именно камеру 304 для смещения, выполненную с возможностью расположения в ней смещающего элемента, а также камеру 306 для текучей среды, выполненную с возможностью содержания текучей среды. Корпус 302 может иметь различные форму и размеры, но в представленном варианте осуществления корпус 302 по существу цилиндрический. Камеры 304, 306 могут быть разделены подвижной поверхностью 308 с параллельным перемещением. В показанном варианте осуществления силы, действующие на поверхность 308 с параллельным перемещением, могут включать в себя силу Ffluid, действующую в направлении поверхности 308 с параллельным перемещением и проксимального конца 309 корпуса, прилагаемую текучей средой в камере 306 для текучей среды, а также силу Fbias, действующую в направлении поверхности 308 с параллельным перемещением и дистального конца 311 корпуса, прилагаемую механизмом 310 для смещения, соединенным с поверхностью 308 с параллельным перемещением. Как показано, механизм 310 для смещения выполнен с возможностью смещать поверхность 308 с параллельным перемещением в направлении дистального конца 311 корпуса и, таким образом, выполнен с возможностью образования источника 300 текучей среды под давлением. В целом, смещение механизма 310 для смещения в противоположном направлении, в направлении проксимального конца 309 корпуса, может преобразить источник 300 текучей среды в резервуар высокого давления. При изменении давления в бандаже 120 поверхность 308 с параллельным перемещением может перемещаться в ответ, т.к. сила Ffluid в камере 306 для текучей среды соответствующим образом изменяется. Например, когда давление Р2 текучей среды в бандаже 120 снижается, к примеру, вслед за приемом пищи, в ответ на любое физиологическое условие, связанное с анатомией пациента, и т.д., смещающая сила Fbias механизма 310 для смещения будет больше силы, приложенной к камере 306 для текучей среды текучей средой в бандаже 120, и, таким образом, поверхность 308 с параллельным перемещением будет перемещаться в направлении дистального конца 311 корпуса (например, увеличивая размер камеры 304 для смещения и уменьшая размер камеры 306 для текучей среды). Это позволит текучей среды перетекать из источника 300 текучей среды в направлении бандажа 120, таким образом повышая давление Р2 текучей среды в бандаже 120. С увеличением давления P2 сила, прикладываемая к камере 306 для текучей среды текучей средой в бандаже 120, превзойдет отклоняющую силу Fbias, чтобы переместить поверхность 308 с параллельным перемещением назад в рабочее положение.
Механизм 310 для смещения может включать в себя произвольное количество элементов, выполненных с возможностью смещения поверхности 308 с параллельным перемещением, но в показанном варианте осуществления механизм 310 для смещения представляет собой пружину, соединенную с внутренней поверхностью корпуса 302 на одном конце пружины, и с поверхностью 308 с параллельным перемещением на втором конце пружины. Поверхность 308 с параллельным перемещением может иметь различную конструкцию, которая позволит перенести силу Ffluid, образуемую текучей средой в камере 306 для текучей среды, на механизм 310 для смещения. Кроме того, механизм 310 для смещения может быть переносным и/или регулируемым для изменения уровня силы Fbias, действующей на текучая среда. Если механизм 310 для смещения представляет собой пружину, предел давления источника 132 текучей среды можно изменять путем замены вида используемой пружины, что может по меньшей мере изменить константу пружины, и/или путем изменения длины используемой пружины. На фиг.3В показан другой вариант осуществления источника 312 текучей среды, где вместо механизма для смещения в камере 304 для смещения, представляющего собой пружину, используется механизм для смещения, включающий в себя термодинамически насыщенную текучую среду 314.
Камера 306 для текучей среды может включать в себя произвольное количество элементов, выполненных с возможностью содержать текучая среда и смещать поверхность 308 с параллельным перемещением. В вариантах осуществления, показанных на фиг.3А и 3В, текучая среда свободно размещается в пределах камеры 306 для текучей среды (например, содержащейся в пределах внутренних поверхностей корпуса 302). В другом варианте осуществления, показанном на фиг.3С, источник 320 текучей среды подобен источнику 300 текучей среды, представленному на фиг.3А, однако источник 320 текучей среды, представленный на фиг.3С, включает в себя корпус 322, имеющий внутреннюю полость 324 с единой камерой (и, таким образом, не имеющий никакой поверхности с параллельным перемещением, разделяющей камеры). Внутренняя полость 324 включает в себя расширяемый баллон, например сильфон 326, и механизм 328 для смещения, размещенный в ней. Сильфон 326 выполнен с возможностью содержать текучая среда и находиться в связи по текучей среде с другими элементами, входящими в состав ограничительной системы 100 (например, механизмом 160 для управления потоком, бандажом 120 и т.д.). Механизм 328 для смещения в этом варианте осуществления представляет собой пружину, соединенную с внутренней поверхностью корпуса 322 на одном конце пружины, и с наружной поверхностью сильфона 326 на втором конце пружины. На фиг.3D показан другой вариант осуществления источника 330 текучей среды, который, подобно источнику 320 текучей среды, представленному на фиг.3С, включает в себя корпус 322, имеющий внутреннюю полость 324 с единой камерой с расширяемым баллоном, например сильфоном 336, размещенным в ней. Подобно источнику 312 текучей среды, представленному на фиг.3В, источник 330 текучей среды также включает в себя текучую среду 338 в термодинамически разрешенном состоянии, размещенную в пределах корпуса 322, которая работает как механизм для смещения.
Механизм 160 для управления потоком, представленный на фиг.1 В, также может иметь различную конструкцию. Обычно корпус 170 для управления включает в себя связующий элемент (например, гибкую трубку), имеющий проход для текучей среды с геометрией, определяющей скорость потока текучей среды через корпус 170 для управления, а, следовательно, и скорость потока между бандажом 120 и источником 132 текучей среды. Геометрия прохода для текучей среды корпуса для управления может регулироваться между множеством фиксированных положений, как будет дополнительно обсуждаться ниже, тем самым предусматривая фиксированные, но регулируемые скорости потока между бандажом 120 и источником 132 текучей среды.
Механизм 160 для управления потоком (например, корпус 170 для управления и, возможно, порт 180) может иметь различные конструкцию, размер и форму и может быть выполнен из различных видов материалов или их сочетаний, предпочтительно из материалов, обладающих биологической совместимостью и подходящих для использования в организме, таких как полимер, биологически совместимый металл (например, нержавеющая сталь и титан) и прочие подобные виды материалов. Корпус 170 для управления может быть жестким или гибким и может быть выполнен из любого сочетания жестких и гибких материалов, однако, как будет дополнительно обсуждаться ниже, корпус 170 для управления предпочтительно имеет жесткие верхнюю и нижнюю поверхности и жесткую стенку по периметру, в то время как связующий элемент, размещенный в пределах корпуса 170 для управления, предпочтительно гибок. Корпус 170 для управления может иметь произвольную форму. Корпус 170 для управления может дополнительно включать в себя два или более соединительных элементов трубки катетера, находящихся в связи по текучей среде с различными элементами, включенными в состав системы 100 (например, бандажом 120, механизмом 130 для управления давлением и портом 180) и выполненных с возможностью соединения с катетером (например, катетером 150) или другим соединительным звеном.
Корпус 170 для управления при необходимости может быть соединен с механизмом для регулирования, например, с портом 180, который можно использовать для регулирования диаметра связующего элемента для текучей среды в пределах корпуса 170 для управления, как будет дополнительно описано ниже. Корпус 170 для управления и порт 180 представляют собой раздельные элементы, находящиеся в связи по текучей среде посредством катетера 150, однако в некоторых вариантах осуществления корпус 170 для управления и порт 180 могут быть включены в единый корпус. Порт 180 может быть выполнен с возможностью позволить текучей среды поступать в один или несколько элементов и выводиться из одного или нескольких элементов, включенных в состав ограничительной системы 100, которая в этом варианте осуществления включает в себя корпус 170 для управления. Порт 180, таким образом, можно имплантировать в то место тела человека, которое доступно через ткань.
Как правило, порты для ввода располагаются в латеральной подреберной области брюшной полости пациента под кожей и слоями жировой ткани. Хирурги также обычно имплантируют порты для ввода на грудину пациента. В целом, поскольку текучая среда поступает и выводится через порт 180, текучая среда, соответственно, может поступать в корпус 170 для управления и выводиться из него, тем самым регулируя диаметр связующего элемента для текучей среды в пределах корпуса 170 для управления.
Порт 180 также может иметь различную конструкцию и при необходимости может быть обеспечен в системе 100, чтобы позволить текучей среды или другим материалам поступать в различные элементы системы 100, такие как бандаж 120, механизм 160 для управления потоком и/или один или несколько источников текучей среды. В одном варианте осуществления, представленном на фиг.4А, порт 180 имеет в общем цилиндрический корпус с дистальной или нижней поверхностью, а также стенкой по периметру, продленной проксимально от нижней поверхности и ограничивающей проксимальное отверстие 182. Проксимальное отверстие 182 может включать в себя доступную для проникновения иглы перегородку 184, продленную через это отверстие и обеспечивающую доступ к источнику текучей среды или резервуару (на фиг.4 не показан), образованному в пределах корпуса порта. Перегородка 184 предпочтительно расположена в достаточно проксимальном положении, так чтобы глубина резервуара была бы достаточной для обнажения открытого конца иглы, такой как иглы Хьюбера, так, чтобы могла состояться передача текучей среды. Перегородка 184 предпочтительно выполнена с возможностью самогерметизации после проникновения в нее иглы и вывода из нее иглы. Как кроме того видно на фиг.4, порт 180 дополнительно может включать в себя элемент 186 для присоединения трубки катетера, который находится в связи по текучей среде с резервуаром и который выполнен с возможностью соединения с катетером (например, катетером 150). Специалист в данной области техник признает, что корпус порта может быть выполнен из произвольного числа материалов, предпочтительно биологически совместимых материалов, таких как нержавеющая сталь, титан или полимерные материалы, и перегородка 184 также может быть выполнена из произвольного числа материалов, предпочтительно биологически совместимых материалов, в том числе из силикона.
Как отмечено выше, корпус 170 для управления может иметь различную конструкцию, однако на фиг.5 показан один вариант осуществления корпуса 170 для управления потоком, который имеет корпус 172 с внутренней полостью 178, имеющей канал для текучей среды 174, размещенный в этой полости. Показанный канал для текучей среды 174 выполнен в виде удлиненного полого изделия, имеющего внутренний проход 176, продолжающийся продольно через него, по которому может перетекать текучая среда, однако канал для текучей среды 174 может иметь различную конструкцию. Кроме того, канал для текучей среды 174 может иметь различные размеры и форму и может быть выполнен из различных материалов (предпочтительно биологически совместимых), но предпочтительно выполнен из гибкого материала, чтобы предусмотреть регулирование его геометрии, таких ее параметров как размер, например, объем или диаметр, и/или форма.
В целом, канал для текучей среды 174 выполнен с возможностью связи по текучей среде с бандажом 120 и источником 132 текучей среды и регулирования диаметра D между двумя или более фиксированными положениями. Диаметр D в этом варианте осуществления определяет внутренний диаметр канала для текучей среды 174, как показано на фиг.6. Сечение канала для текучей среды 174 показано как по существу круглое, но канал для текучей среды 174 может иметь различную форму сечения, например, эллиптическую, прямоугольную, квадратную, «D»-образную и т.д. Форма канала для текучей среды 174 определяет скорость потока текучей среды через корпус 170 для управления, причем большему диаметру D соответствует более высокая скорость потока (например, перенос большего объема текучей среды в секунду), а меньшему диаметру D соответствует меньшая скорость потока (например, перенос меньшего объема текучей среды в секунду). Другими словами, регулирование диаметра D канала для текучей среды 174 может увеличить или уменьшить размер (например, объем) внутреннего прохода 176, а следовательно, увеличить или уменьшить объем текучей среды, которая может перетекать через канал для текучей среды 174 в некоторый период времени. Скорость потока (Q) через канал для текучей среды 174 в общем случае можно выразить следующим образом, где L - продольная длина трубопровода для текучей среды. P1 - давление текучей среды в источнике 132 текучей среды, а P2 - давление текучей среды в бандаже 120:
Диаметр D может изменяться по длине L канала для текучей среды 174, как дополнительно будет обсуждаться ниже, но как показано на фиг.5, канал для текучей среды 174 находится в равновесном положении, в котором диаметр D по существу постоянен по длине L канала для текучей среды. Другими словами, в равновесном положении диаметр D канала для текучей среды 174 по существу равен диаметру dc катетера 150, соединяющего механизм 160 для управления потоком с бандажом 120 и с источником 132 текучей среды, так что в ходе эксплуатации механизм 160 для управления потоком эффективно функционирует как часть катетера 150 и существенно не увеличивает и не уменьшает скорость потока текучей среды через корпус 170 для управления по сравнению со скоростью потока текучей среды через катетер 150, соединяющий механизм 160 для управления потоком с бандажом 120 и с источником 132 текучей среды. В этом случае диаметр Dc катетера является внутренним диаметром катетера, который должным образом соответствует диаметру D канала для текучей среды.
Диаметра D канала для текучей среды можно регулировать различным образом, но в определенных примерах осуществления размер диаметра D можно регулировать путем подачи текучей среды во внутреннюю полость 178 корпуса 172 и путем вывода текучей среды из нее. Другими словами, для канала для текучей среды 174, размещенного в пределах внутренней полости 138, может быть предусмотрено большее или меньшее пространство для расширения в пределах внутренней полости 178 в зависимости от количества текучей среды, размещенной в пределах внутренней полости 178 (внешней по отношению к каналу для текучей среды 174). Выполнен ли корпус 172 из жесткого материала или из гибкого материала, внутренняя полость 178 может иметь внутреннюю область, способную содержать конечное количество текучей среды (например, воздуха, воды, соляного раствора и т.д.). Когда во внутреннюю полость 178 добавляется текучая среда, канал для текучей среды 174 может сжиматься (например, диаметр D может уменьшиться для уменьшения объема внутреннего прохода 176), чтобы разместить дополнительную текучая среда во внутренней полости 178. Соответственно, когда текучая среда выводится из внутренней полости 178, канал для текучей среды может расшириться (например, диаметр D может увеличиться для увеличения объема внутреннего прохода 176), с учетом вновь освобожденного пространства во внутренней полости 178. Например, полость 178 для текучей среды может находиться в связи по текучей среде с портом 180 (например, с резервуаром для текучей среды, включенным в состав порта 180). Когда некоторое количество текучей среды поступает в механизм 160 для управления потоком или выводится из него через порт 180, соответствующее количество текучей среды поступает во внутреннюю полость 178 или выводится из нее. Поскольку внутренняя полость 178 имеет конечный объем, в который может вместиться текучая среда, размещенная там, и канал для текучей среды 174, также размещенный в пределах внутренней полости 178, поддерживание постоянного количества текучей среды во внутренней полости 178 позволяет каналу для текучей среды 174 занять фиксированное положение с максимальным диаметром. Канал для текучей среды 174 может оставаться в фиксированном положении по меньшей мере до того, как (и при условии, что) количество текучей среды во внутренней полости 178 изменится, когда канал для текучей среды 174 сможет перейти в другое фиксированное положение с другим максимальным диаметром D. Канал для текучей среды 174 может увеличиваться в диаметре от одной величины до любой другой большей величины, а также уменьшаться в диаметре от одной величины до любой другой меньшей величины.
Как показано в одном варианте осуществления увеличенного диаметра канала для текучей среды на фиг.7, текучая среда можно вывести из механизма 160 для управления потоком через порт 180, используя иглу 190, например иглу Хьюбера, введенную через перегородку 184 порта, тем самым уменьшая количество текучей среды во внутренней полости 178 корпуса для управления. С уменьшением количества текучей среды во внутренней полости 178 канал для текучей среды 174 может увеличиться от равновесного положения с диаметром D до второго положения с увеличенным диаметр Di, где Di больше, чем D. Как показано на фиг.7, увеличенный диаметр Di канала для текучей среды 174 не постоянен по длине L канала для текучей среды 174 (хотя увеличенный диаметр Di в некоторых вариантах осуществления может иметь постоянное значение по длине L). Скорее, диаметр D канала для текучей среды 174 увеличивается до значения увеличенного диаметра Di по меньшей мере на среднем участке канала для текучей среды 174 и по существу сохраняет равновесное значение диаметра D на проксимальном и дистальном концах канала для текучей среды, где канал для текучей среды 174 соединяется с корпусом 172 так, чтобы находиться в связи по текучей среде с катетером 150. Сохраняется эффект, при котором уменьшение количества текучей среды во внутренней полости 178 приводит к увеличению диаметра канала для текучей среды и увеличению объема внутреннего прохода 176, через который текучая среда может перетекать между бандажом 120 и источником 132 текучей среды.
Точно так же, как показано в одном варианте осуществления уменьшенного диаметра канала для текучей среды на фиг.8, текучая среда можно ввести в механизм 160 для управления потоком через порт 180, используя иглу 190, тем самым увеличивая количество текучей среды во внутренней полости 178 корпуса для управления. С увеличением количества текучей среды во внутренней полости 178 канал для текучей среды 174 может уменьшиться от равновесного положения с диаметром D до второго положения с уменьшенным диаметром Dd, где Dd меньше, чем D. Как показано на фиг.8, уменьшенный диаметр Dd канала для текучей среды 174 не постоянен по длине L канала для текучей среды 174 (хотя уменьшенный диаметр Dd в некоторых вариантах осуществления может иметь постоянное значение по длине L). Скорее, диаметр D канала для текучей среды 174 уменьшается до значения минимального диаметра Dd по меньшей мере на среднем участке канала для текучей среды 174 и по существу сохраняет равновесное значение диаметра D на проксимальном и дистальном концах канала для текучей среды. Сохраняется эффект, при котором увеличение количества текучей среды во внутренней полости 178 приводит к уменьшению диаметра канала для текучей среды и уменьшению объема внутреннего прохода 176, через который текучая среда может перетекать между бандажом 120 и источником 132 текучей среды.
Поскольку корпус 172 является жестким в этом варианте осуществления, как показано, на фиг.7 и 8, корпус 172 не изменяет размер или форму с выведением текучей среды из внутренней полости 178 или поступлением текучей среды в нее, также как не изменяется длина L канала для текучей среды 174.
Диаметр D канала для текучей среды 174 может изменяться даже в фиксированном положении, зависящем, например, от количества текучей среды, перетекающей через внутренний проход 176. Например, канал для текучей среды 174 может по меньшей мере частично сократиться до меньшего диаметра по меньшей мере на своем среднем участке, если через механизм 160 для управления потоком перетекает мало текучей среды или не перетекает вовсе, например потому, что через внутренний проход 176 перетекает недостаточно текучей среды, чтобы позволить внутреннему проходу 176 расшириться до своего максимального объема, т.к. по существу вся текучая среда в замкнутой гидросхеме системы находится в бандаже 120. Однако канал для текучей среды 174 по-прежнему занимает фиксированное положение, которое не может изменяться, например, канал для текучей среды 174 не может увеличиться в объеме сверх того, что позволено во внутренней полости 178 количеством текучей среды, размещенной за пределами канала для текучей среды 174 во внутренней полости 178.
При том, что шприц 190 представлен как шприц для регулирования вручную количества текучей среды во внутренней полости 178 через порт 180, на самом деле нет необходимости в переносе текучей среды между внутренней полостью 178 (или любой частью корпуса 170 для управления) и шприцем 190. Другими словами, количество текучей среды во внутренней полости 178 можно регулировать просто путем смещения текучей среды между внутренней полостью 178 и шприцем 190 (например, путем поступления текучей среды в источник текучей среды или резервуар, включенный в состав порта 180, или выведения текучей среды из источника текучей среды или резервуара, включенного в состав порта 180, что приводит к перемещению текучей среды предварительно во внутренней полости 178, или к вытеснению текучей среды во внутреннюю полость), поскольку такое смещение приведет к подобному смещению текучей среды «вперед по ходу» во внутренней полости 178. Текучая среда, введенная во внутреннюю полость 178 или выведенная из нее через порт 180, на самом деле не обязательно должна поступать из шприца 190 или отводиться в шприц 190 (или даже из порта 180 или в порт 180, поскольку текучая среда может вытесняться из катетера 150 или любого иного связующего звена между портом 180 и корпусом 170 для управления). Кроме того, поток любой текучей среды, обсуждаемой здесь, может включать в себя подобное смещение текучей среды между двумя или более элементами.
Как обсуждалось выше, механизм 160 для управления потоком может иметь различную конструкцию, а система 100 может включать в себя произвольное количество источников текучей среды. Например, количество текучей среды во внутренней полости 178 корпуса для управления можно регулировать непосредственно через корпус 170 для управления, а не через порт 180, если, например, корпус 170 для управления включает в себя перегородку (наподобие перегородки 180), выполненную с возможностью позволить текучей среды поступать во внутреннюю полость 178 или выводиться из нее.
Произвольное количество текучей среды может поступать в механизм 160 для управления потоком или выводиться из него через порт 180 произвольное количество раз и с произвольной частотой. Количество текучей среды, поступающей в механизм 160 для управления потоком и/или выводимой из него, количество раз, когда текучая среда поступает в механизм 160 для управления потоком и/или выводится из него, а также частота регулирования текучей среды могут изменяться пациентом и предпочтительно определяется лечащим врачом пациента (или иным медицинским персоналом) как часть схемы лечения пациента. Кроме того, система 100 может быть имплантирована пациенту с определенным количеством текучей среды в механизме 160 для управления потоком (в том числе и без текучей среды в механизме 160 для управления потоком). Вслед за имплантацией механизм 160 для управления потоком может быть заполнен некоторым количеством текучей среды, например путем поступления текучей среды в порт 180 с использованием шприца 190.
В другом варианте осуществления, не показанном здесь, канал для текучей среды 174 может включать в себя микрокапилляр, например, капиллярную трубку. Микрокапилляр может изменять свой диаметр D и свою длину L, когда текучая среда добавляется во внутреннюю полость 178 или выводиться из нее (например, как описано выше, с использованием порта). В этом варианте осуществления корпус 172 предпочтительно гибок или по меньшей мере частично гибок, чтобы позволить микрокапилляру увеличиваться или сокращаться по длине. Например, как показано в одном варианте осуществления уменьшенного диаметра канала для текучей среды на фиг.9, текучая среда может вводиться в механизм 160 для управления потоком через порт 180 с использованием шприца 190, тем самым увеличивая количество текучей среды во внутренней полости 178'. С увеличением количества текучей среды во внутренней полости 178' канал для текучей среды 174' может уменьшиться от равновесного положения с диаметром D до второго положения с уменьшенным диаметром Dd, постоянным по длине Li микрокапилляра 174', где Li больше, чем L. Таким же образом, в другом примере, представленном на фиг.10, текучая среда может быть выведена из механизма 160 для управления потоком через порт 180 с использованием шприца 190, тем самым уменьшая количество текучей среды во внутренней полости 178'. С уменьшением количества текучей среды во внутренней полости 178' канал для текучей среды 174' может увеличиться от равновесного положения с диаметром D до второго положения с увеличенным диаметром Di., постоянным по длине Ld микрокапилляра 174', где Ld меньше, чем L.
В некоторых вариантах осуществления микрокапилляр 174' может иметь спиралеобразное сечение А-А, как показано в варианте микрокапилляра 174' на фиг.11. Микрокапилляр 174' может иметь такое спиралеобразное сечение по всей своей длине L или вдоль любого одного или нескольких участков по своей длине L. Такое спиралеобразное сечение может позволить микрокапилляру 174' увеличивать или уменьшать свою длину L, соответственно, с поступлением текучей среды во внутреннюю полость 178 и выводом текучей среды из нее. Другими словами, микрокапилляр 174' может работать как расширительный раструб. Предпочтительно, чтобы дистальный и проксимальный участки микрокапилляра были оба выполнены спиралеобразными так, чтобы дистальный и проксимальный участки могли расширяться и сжиматься для изменения длины L микрокапилляра 174'.
В другом варианте осуществления механизма 160 для управления потоком диаметром механизма 160 для управления потоком можно управлять с возможностью регулирования через линейное перемещение. Как показано в одном варианте осуществления на фиг.12, механизм 160' для управления потоком включает в себя проход 200 для текучей среды, находящийся в связи по текучей среде с бандажом 120 и источником 132 текучей среды. Проход 200 для текучей среды имеет максимальный диаметр или толщину tmax вдоль продольной длины L2 прохода для текучей среды. Максимальная толщина tmax прохода 200 для текучей среды может регулироваться вдоль по меньшей мере участка его продольной длины l2. Как показано на этом примере, участок, меньший, чем продольная длина L2, имеет регулируемый диаметр или толщину t. С изменением регулируемой толщины t прохода 200 для текучей среды скорость потока через механизм 160 для управления потоком изменяется и может быть в общем случае выражена как
где скорость потока (Q) достигает максимума, когда регулируемая толщина t равна максимальной толщине tmax.
Регулируемая толщина t может регулироваться между двумя или более фиксированными положениями различными способами. Например, длина 1 механизма 202 для преграждения, продолженного в проход 200 для текучей среды, может ограничивать регулируемую толщину t прохода 200 для текучей среды. Длина 1 может иметь произвольную величину (в том числе нулевую, при этом регулируемая толщина t достигает своего максимального значения tmax без какого бы то ни было препятствия в проходе 200 для текучей среды, обеспечиваемого механизмом 202 для преграждения). Обычно скорость потока и регулируемая толщина t связаны линейной зависимостью, при которой с увеличением длины 1 уменьшаются диаметр прохода 200 для текучей среды и скорость текучей среды через проход 200 для текучей среды, а с уменьшением длины 1 увеличиваются диаметр прохода 200 для текучей среды и скорость текучей среды через проход 200 для текучей среды.
Как дополнительно показано на фиг.12, механизм 204 для регулирования может быть соединен с механизмом 202 для преграждения и может быть выполнен с возможностью изменения длины 1 механизма 202 для преграждения, который продолжается в проход 200 для текучей среды. Механизм 204 для регулирования может иметь различную конструкцию, но в варианте осуществления, показанном на фиг.12, механизм 204 для регулирования выполнен в виде заполненного текучей средой баллона, например, сжимаемого сильфона. Механизм 204 для регулирования может иметь соединение по текучей среде с портом 180 через катетер 150 (или любое другое соединительное звено), чтобы позволить текучей среды поступать в механизм 204 для регулирования или выводиться из него посредством порта 180 (например, с использованием шприца 190) для того, чтобы способствовать изменению длины 1 механизма 202 для преграждения в проходе 200 для текучей среды. В качестве другого нелимитирующего примера, иной механизм 204 для регулирования, который можно использовать, представляет собой винт, соединенный с механизмом 202 для преграждения. Вращение винта способно эффективно привести к увеличению и/или уменьшению силы, прилагаемой винтом к механизму 202 для преграждения, который, в свою очередь, изменяет длину 1 механизма 202 для преграждения в проходе 200 для текучей среды. В качестве дополнительного нелимитирующего примера, иной механизм для регулирования, который можно использовать, представляет собой поршневой цилиндр, который может приводить в действие механизм 202 для преграждения.
Специалист в данной области техники признает также, что механизм 204 для регулирования может иметь определенные характеристики, которые могут регулироваться для изменения длины 1 механизма 202 для преграждения в проходе 200 для текучей среды. Например, в вариантах осуществления, где механизм 204 для регулирования включает в себя пружину, константа пружины или длина пружины могут регулироваться для изменения длины 1 механизма 202 для преграждения в проходе 200 для текучей среды. Пружина может представлять собой любой гибкий упругий предмет произвольной формы. Например, пружина может представлять собой спиральную или винтовую пружину цилиндрической формы, однако возможны и другие формы пружины, такие как коническая или двойная коническая, а также пружина может иметь индивидуальную намотку любой формы, такую как эллиптическая или прямоугольная. Другие примеры механизма 204 для регулирования включают в себя упругую полоску, нить или шнур, спиральную пружину и схожие типы гибких упругих предметов. Пружина также может иметь различные размеры и, если используется более одной пружины, различные пружины, используемые для механизма 204 для регулирования, могут иметь различные размеры и формы. Кроме того, если где-то в пределах ограничительной системы 100 (или другой ограничительной системы) используется более одной пружины или другой механизм для смещения, каждая пружина может быть такой же, как любая другая пружина в пределах ограничительной системы 100 или отличаться от любой другой пружины в пределах ограничительной системы 100.
Механизм 202 для преграждения может иметь различные размеры, форму и конструкцию. Обычно продольная ось Ао механизма 202 для преграждения продолжается по существу перпендикулярно продольной оси Ар прохода 200 для текучей среды так, что перемещение механизма 202 для преграждения, по существу параллельное оси Ао, изменяет длину 1 механизма 202 для преграждения, в проходе 200 для текучей среды. В варианте осуществления, показанном на фиг.12, механизм 202 для преграждения представляет собой по существу цилиндрический, гладкий, прямолинейный жесткий стержень, который по меньшей мере частично окружен по существу непроницаемой для текучей среды втулкой 206. Однако механизм 202 для преграждения может иметь любые размер, форму и конструкцию, предусматривающие его соединение с механизмом 204 для регулирования. При расширении механизма 204 для регулирования (например, благодаря поступлению текучей среды в механизм 204 для регулирования посредством введения текучей среды в порт 180), механизм 202 для преграждения как жесткий элемент по меньшей мере частично окруженный втулкой 206, не деформируется и не изгибается, а продвигается в проход 200 для текучей среды, тем самым увеличивая длину 1 механизма 202 для преграждения в проходе 200 для текучей среды. Таким же образом, при сокращении механизма 204 для регулирования (например, благодаря выведению текучей среды из механизма 204 для регулирования посредством удаления текучей среды из порта 180), механизм 202 для преграждения также по меньшей мере частично выдвигается из прохода 200 для текучей среды, тем самым уменьшая длину 1 механизма 202 для преграждения в проходе 200 для текучей среды.
Другой вариант осуществления механизма для преграждения показан на фиг.13. В этом варианте осуществления механизм для преграждения включает в себя стержень 208 с резьбой, который по меньшей мере частично окружен по существу непроницаемой для текучей среды втулкой 210, которая включает в себя нарезку 212 резьбы, выполненную с возможностью зацепления со стержнем 208 с резьбой. Механизм для регулирования, такой как описан выше (например, сифон, поршневой цилиндр и т.д.) может быть использован для того, чтобы вращательно привести в действие стержень 208 с резьбой, тем самым регулируя толщину t, a, следовательно, и скорость потока через проход 200.
В еще одном варианте осуществления механизма 160'' для управления потоком скоростью потока между бандажом 120 и источником 132 текучей среды можно управлять путем регулирования потока текучей среды через пористую мембрану. Как показано на фиг.14, механизм 160'' для управления потоком включает в себя пористый диск или полупроницаемую мембрану 220, расположенную в корпусе 222 для мембраны. Корпус 222 для мембраны имеет проксимальный и дистальный концы 224, 226, имеющие соединение по текучей среде, соответственно, с бандажом 120 и источником 132 текучей среды. Мембрана 220 расположена между проксимальным и дистальным концами 224, 226 на среднем участке 228 корпуса 222 для мембраны. Мембрана 220 может быть приспособлена для того, чтобы позволить текучей среды перетекать в корпус 222 для мембраны и из него, при этом изолируя любую текучая среда, содержащуюся в корпусе 222 для мембраны, от окружающей среды. В одном примере осуществления мембрана 220 выполнена из ацетилцеллюлозы. Скорость потока (Q) через корпус 222 для мембраны можно в общем случае выразить следующим образом, где w выражает средние значения ширины, диаметра или толщины мембраны 220, a d - размер поры пористой мембраны, через которую может протекать текучая среда:
Размер поры d и средняя толщина w могут иметь произвольные значения. Размер поры d предпочтительно постоянен для данной мембраны 220. Средняя толщина w может регулироваться, тем самым регулируя скорость потока через механизм 160'' для управления потоком.
Средняя толщина w мембраны 220 может регулироваться различными путями. Один путь регулирования средней толщины w заключается в размещении корпуса 222 для мембраны в корпусе для управления потоком (например, корпусе 170 для управления потоком, который обсуждался выше), как показано в варианте осуществления на фиг.15. Количество текучей среды, которое также размещено в пределах корпуса 170 для управления потоком, можно регулировать (например, с использованием порта 180 и шприца 190, как обсуждалось выше), позволяя тем самым корпусу 222 для мембраны сжиматься и расширяться, а, следовательно, уменьшаться и увеличиваться толщине w мембраны 220, размещенной в нем. Обычно большее количество текучей среды в корпусе 170 для управления потоком соответствует меньшей толщине w и большей скорости потока, а меньшее количество текучей среды в корпусе 170 для управления потоком соответствует большей толщине w и меньшей скорости потока.
На фиг.16-18 показан один вариант осуществления ограничительной системы 100 в действии. В варианте осуществления, показанном на фиг.16-18, система 100 включает в себя источник 300 текучей среды под давлением, представленный на фиг.3А, и механизм 160 для управления потоком, представленный на фиг.5-8, с каналом для текучей среды 174, имеющим регулируемый диаметр D. Как показано, канал для текучей среды 174 имеет уменьшенный диаметр Dd, как представлено на фиг.8. На стадии покоя, показанной на фиг.16, бандаж 120 по существу закрывает просвет в желудке 140, например, просвет пребывает в положении покоя, т.к. на просвет не действуют по существу никакие силы (помимо силы бандажа 120 по существу на закрытие просвета). Другими словами, пациент не принимает пищу, не пьет, не осуществляет глотательные движения, не извергает рвотные массы или как-то иначе вольно или невольно прилагает силу к пищеводу 142, желудку 140 и/или бандажу 120. На стадии покоя текучая среда из источника 300 текучей среды по существу заполняет бандаж 120. Другими словами, система 100 находится в состоянии равновесия. Кроме того, текучая среда в пределах системы 100 находится в стационарном состоянии, т.е. текучая среда не перетекает через механизм 160 для управления потоком между бандажом 120 и источником 300 текучей среды.
Когда на просвет действует сила (например, перистальтические волны при приеме внутрь пищи и при глотательных движениях), как на стадии приложения усилия, показанной на фиг.17, эта сила может создавать давление Р2 в бандаже 120 более высокое, чем давление P1 в источнике 300 текучей среды. Под воздействием такой разницы в давлении (P2>P1) механизм 130 для управления давлением может позволить текучей среды в бандаже 120 перетекать из бандажа 120 по направлению к источнику 300 текучей среды через механизм 160 для управления потоком. Как обсуждалось выше, диаметр D канала для текучей среды 174 может регулировать скорость потока текучей среды между бандажом 120 и источником 300 текучей среды, регулируя, таким образом, скорость, с которой изменяется давление. Поскольку ощущение сытости у пациента по существу определяется количеством времени, которое требуется текучей среды в бандаже 120 для того, чтобы перетечь из бандажа 120 в направлении источника 300 текучей среды, а, следовательно, количеством времени, которое требуется пище для прохождения через просвет (или для естественного переваривания перед прохождением через просвет), уменьшенный диаметр Dd может позволить пациенту быстрее испытать ощущение сытости, а также испытывать ощущение сытости в течении более продолжительного периода времени, т.к. скорость потока через механизм 160 для управления будет меньше, чем она была бы при прохождении через соединение с по существу постоянным диаметром, расположенным между бандажом 120 и источником 300 текучей среды. Подобным же образом, если бы диаметр канала для текучей среды 174 составлял увеличенный диаметр Di, представленный на фиг.7, пациент испытал бы ощущение сытости не так быстро и на меньший период времени, поскольку текучая среда перетекала бы быстрее через механизм 160 для управления потоком из бандажа 120 по направлению к источнику 300 текучей среды. В этой связи врач (или иное уполномоченное лицо) может регулировать диаметр канала для текучей среды 174 сколь угодно раз в ходе курса лечения пациента с бандажом 120, например, для того, чтобы обеспечить соответствующее ощущение сытости у пациента. Другими словами, регулирование диаметра канала для текучей среды 174 может снизить или не допустить быстрого изменения давления в бандаже 120, которое может понизить эффективность бандажа 120 и повлиять на модель питания пациента и/или на контроль общей массы тела.
Когда механизм 130 для управления давлением позволил достаточному количеству текучей среды перетечь из бандажа 120 по направлению к источнику 300 текучей среды через канал для текучей среды 174, ограничение, накладываемое на желудок 140 бандажом 120, может стать по существу незначительным, так чтобы позволить пище проходить через просвет, как показано на стадии прохождения на фиг.18. Этим самым ощущение сытости у пациента снижается. Когда сила перестает действовать на просвет (например, пациент прекратил прием пищи), разница в давлении может измениться на обратную так, что давление Р2 текучей среды в бандаже 120 станет меньше, чем давление P1 текучей среды в источнике 120 текучей среды, что позволит текучей среды перетекать от источника 300 текучей среды в направлении бандажа 120.
В другом варианте осуществления вместо изменения геометрии механизма для управления потоком для регулирования скорости потока текучей среды между источником текучей среды и ограничительным устройством может быть использован механизм для смещения для ограничения скорости потока через механизм для управления потоком. На фиг.19А показан механизм 410 для управления потоком, соединенный с источником 412 текучей среды для регулирования потока текучей среды между источником 412 текучей среды и ограничительным устройством 402. Механизм 410 для управления потоком включает в себя механизм для смещения, а именно заполненный текучей средой корпус 414, который управляет скоростью перемещения привода, соединенного с источником 412 текучей среды. Перемещение привода эффективно направляет текучая среда между источником 412 текучей среды и ограничительным устройством 402, и, таким образом, скорость перемещения привода соответствует скорости потока текучей среды между источником 412 текучей среды и ограничительным устройством 402. Скорость перемещения можно регулировать, как будет подробнее обсуждаться ниже. Механизм 410 для управления потоком, что также будет подробнее обсуждаться ниже, может также включать в себя механизм для регулирования давления для осуществления регулировки давления ограничительного устройства 402.
Как показано на фиг.19А, источник 412 текучей среды выполнен в виде сильфона (хотя источник текучей среды может иметь различную конструкцию, как обсуждалось выше), который находится в связи по текучей среде с ограничительным устройством 402 посредством катетера 406. Один конец 400 сильфона закреплен на корпусе, а другой конец 404 соединен с приводом 416. Привод 416 может иметь различную конструкцию, но, как показано, привод 416 включает в себя жесткий стержень 428, соединенный на одном конце с источником 412 текучей среды, а на другом своем конце с пористым элементом 418 (например, сеткой из ячеек, пористой мембраной, диском с множеством выполненных в нем отверстий или любой другой пористой композицией, позволяющей текучей среды проходить сквозь нее), размещенным в пределах заполненного текучей средой корпуса 414. Перемещение пористого элемента 418 в пределах заполненного текучей средой корпуса 414 может управлять скоростью потока текучей среды между ограничительным устройством 402 и источником 412 текучей среды. Пористый элемент 418 может перемещаться с определенной скоростью через - заполненный текучей средой корпус 414, зависящей от различных факторов, таких как форма и размер стержня 428 и пористого элемента 418, а также вида текучей среды 420, которая содержится в заполненном текучей средой корпусе 414. Текучая среда 420 в корпусе 414 может протекать через пористый элемент 418 для регулирования скорости перемещения пористого элемента 418 через корпус 414 и тем самым также для регулирования скорости перемещения стержня 428, а, следовательно, и скорости потока текучей среды между источником 412 текучей среды и ограничительным устройством 402. По мере перемещения пористого элемента 418, в направлении дистального конца 422 заполненного текучей средой корпуса 414, источник 412 текучей среды расширяется, и, следовательно, текучая среда перетекает из бандажа 402 в направлении источника 412 текучей среды, чтобы уменьшить количество текучей среды в ограничительном устройстве 402. Таким же образом, по мере перемещения пористого элемента 418 в направлении проксимального конца 424 заполненного текучей средой корпуса 414, источник 412 текучей среды сжимается, заставляя текучая среда перетекать в направлении ограничительного устройства 402 из источника 412 текучей среды, чтобы увеличить количество текучей среды в ограничительном устройстве 402.
Скоростью перемещения пористого элемента 418 сквозь текучая среда 420 можно управлять путем подбора конструкции пористого элемента 418 (например, размера и количества отверстий, через которые может протекать текучая, среда) и состава текучей среды (например, вязкости текучей среды). Заполненный текучей средой корпус 414 при необходимости может находиться в связи по текучей среде с портом, как описывалось ранее, чтобы позволить текучей среды 420 в заполненном текучей средой корпусе 414 замещаться текучей средой, имеющей другую вязкость, для регулирования скорости перемещения привода через корпус 414. Обычно чем выше вязкость текучей среды 420, тем ниже скорость, с которой пористый элемент 418 может перемещаться сквозь текучая среда 420.
Привод 416 также может быть связан с пружиной 426, которая может регулировать давление текучей среды в ограничительном устройстве 402. Пружина 426 может обеспечивать смещающее усилие, прикладываемое к источнику 412 текучей среды, в ответ на изменение давления в ограничительном устройстве, как более подробно описано в упомянутой ранее публикации U.S. Application №11/965,322 под заглавием «Constant Force Mechanism For Regulating Restriction Devices», зарегистрированной 27 декабря 2007 г.Смещающее усилие пружины можно регулировать изнутри или снаружи, а сама пружина 428 может быть сменной.
В другом варианте осуществления, показанном на фиг.19 В, механизм 410 для управления потоком может включать в себя вторую пружину 434, связанную с дистальным концом 436 заполненного текучей средой корпуса 414. Когда пористый элемент 418, размещенный в пределах заполненного текучей средой корпуса 414, находится в максимально удаленном положении, примыкая к дистальному концу 436 корпуса, пружина 434 может позволить источнику 412 текучей среды дополнительно расшириться, например, для того, чтобы по-прежнему позволять текучей среды перетекать от ограничительного устройства 402 по направлению к источнику 412 текучей среды.
Специалист в данной области техники признает, что настоящее изобретение имеет применение в инструментарии, используемом при традиционных эндоскопических и открытых операциях, а также применение в роботизированной хирургии.
Устройства, раскрытые здесь, могут быть выполнены с возможностью одноразового применения, или они могут быть выполнены с возможностью многократного применения. В любом случае, однако, устройство может быть восстановлено для повторного использования после по меньшей мере одного использования. Восстановление может включать в себя любое сочетание этапов разборки устройства, за которыми следует чистка или замена определенных деталей и последующая повторная сборка. В частности, устройство может быть разобрано и любое количество определенных деталей или частей устройства может быть селективно заменено или устранено в любом сочетании. После чистки и/или замены определенных частей устройство может быть повторно собрано для последующего использования либо в подразделении по ремонту, либо операционной бригадой непосредственно перед операцией. Специалисты в данной области техники признают, что при восстановлении устройства могут быть использованы различные технические приемы для разборки, чистки/замены и повторной сборки. Использование таких технических приемов, а также восстановленное в конечном виде устройство входят в объем настоящего изобретения.
Предпочтительно, чтобы описанное здесь изобретение было бы технологически осуществлено перед хирургическим вмешательством. Сначала берется новый или использованный инструмент и при необходимости подвергается чистке. После этого инструмент может быть простерилизован. По одной технологии стерилизации инструмент помещают в закрытый или герметичный контейнер, такой как мешок из пластика или материала «Тивек». После этого контейнер и инструмент помещают в поле радиации, проникающей в контейнер, такой как гамма-радиация, рентгеновское излучение или поле электронов высокой энергии. Радиация уничтожает бактерии на инструменте и в контейнере. Простерилизованный инструмент можно далее хранить в стерильном контейнере. Герметичный контейнер сохраняет инструмент в стерильном состоянии до его открытия в медицинском учреждении.
Предпочтительно, чтобы устройство было простерилизовано. Это можно сделать различными путями, известными специалистам в данной области техники, включая бета и гамма радиацию, стерилизацию этиленоксидом, стерилизацию паром.
Специалист в данной области техники признает дополнительные особенности и преимущества изобретения на основе описанных выше вариантов осуществления. Соответственно, изобретение не следует ограничивать лишь сугубо тем, что было показано и описано, за исключением того, что отмечено в прилагаемой формуле изобретения. Все публикации и ссылки, приведенные здесь, в явном виде включены в настоящее описание путем ссылки во всей их полноте.
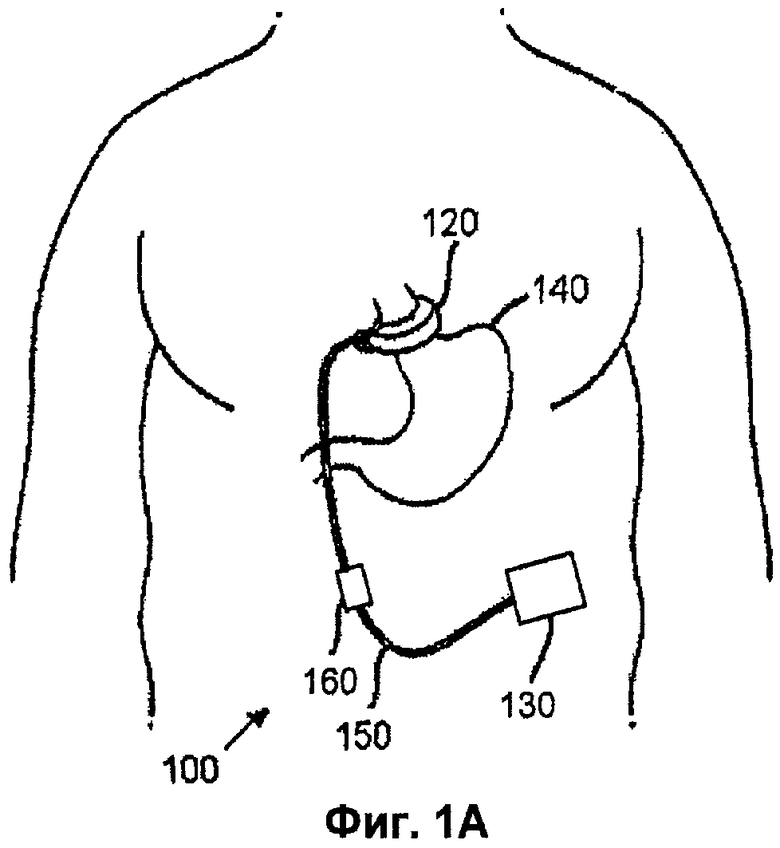
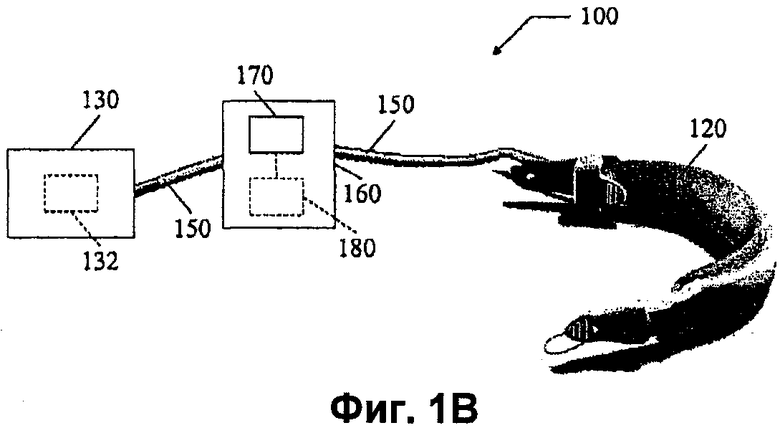
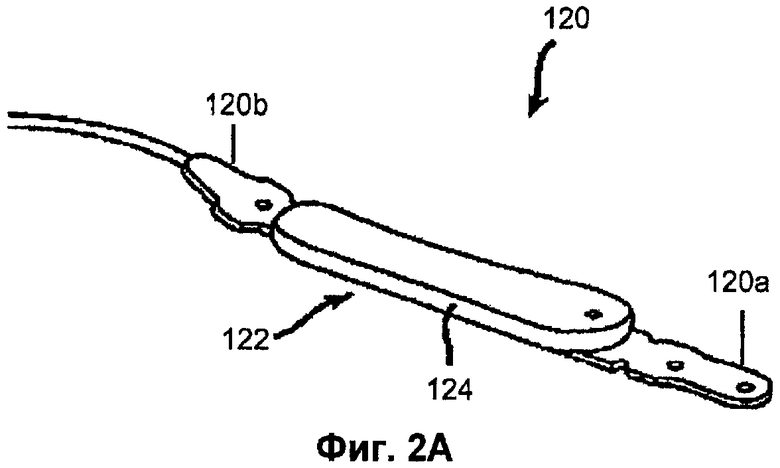
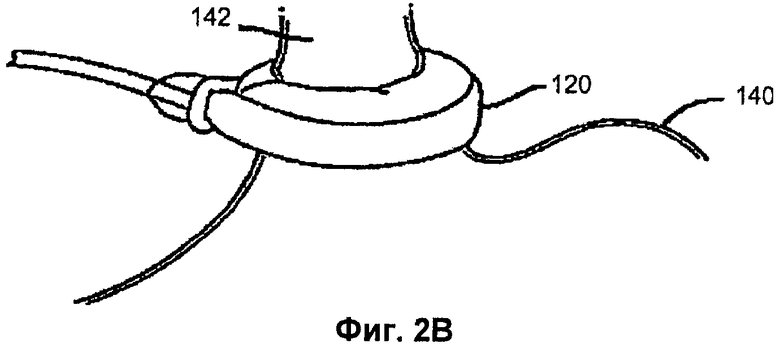
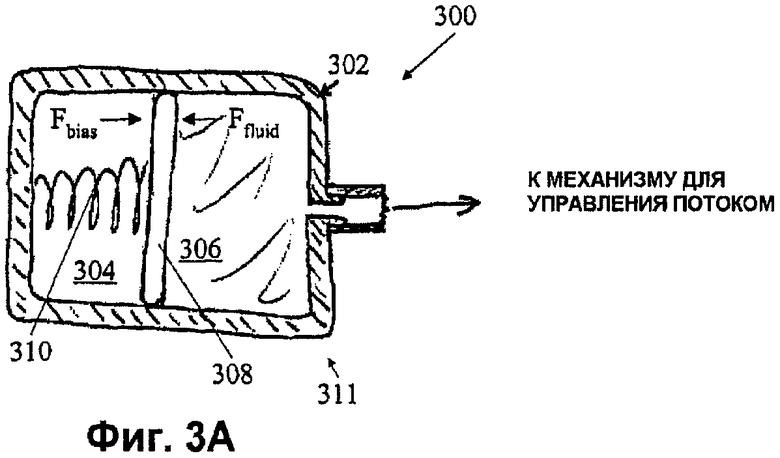
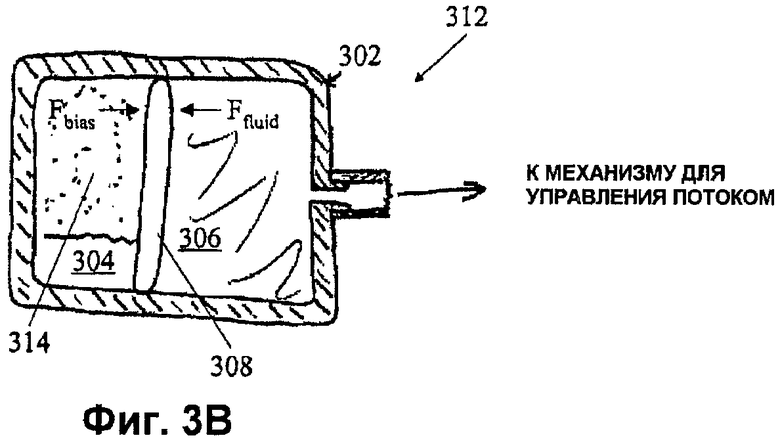
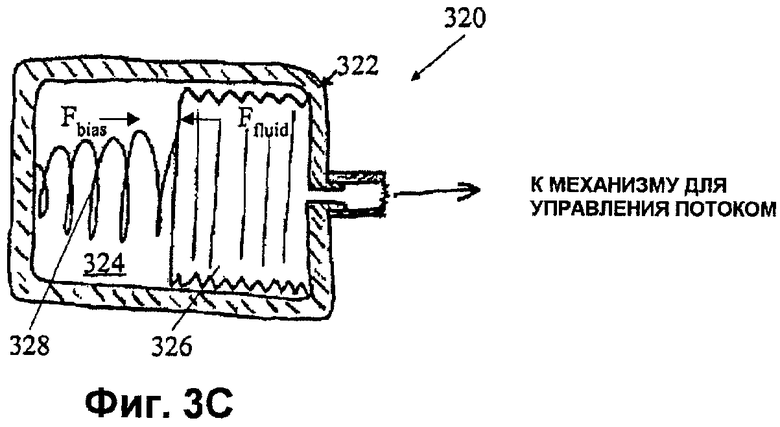
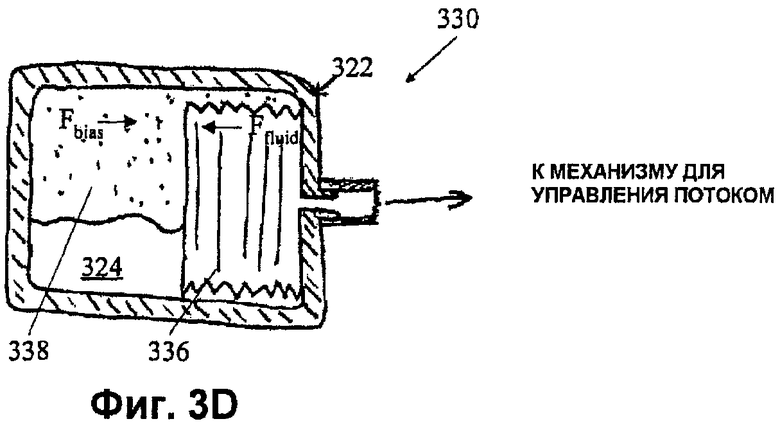
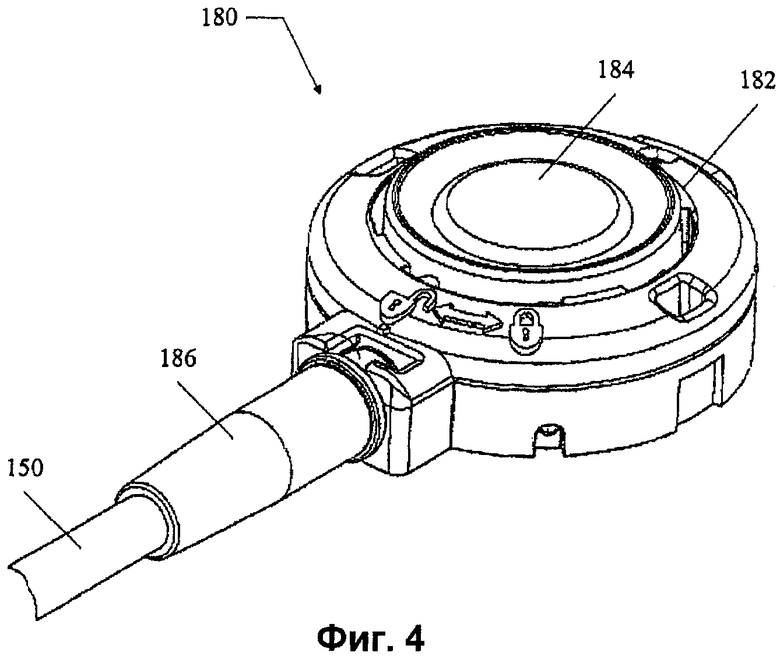
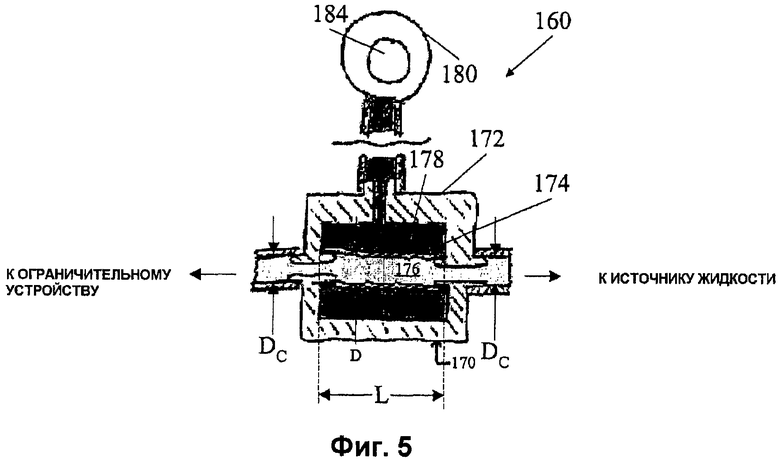
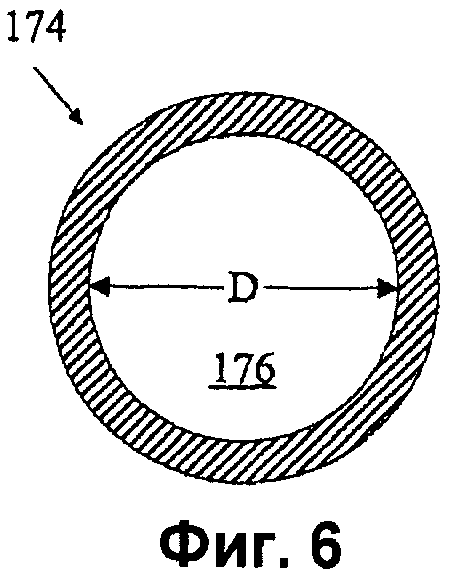
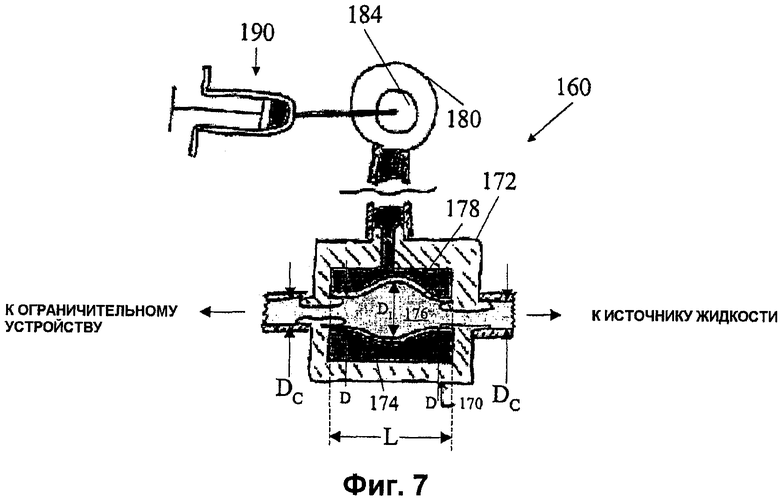
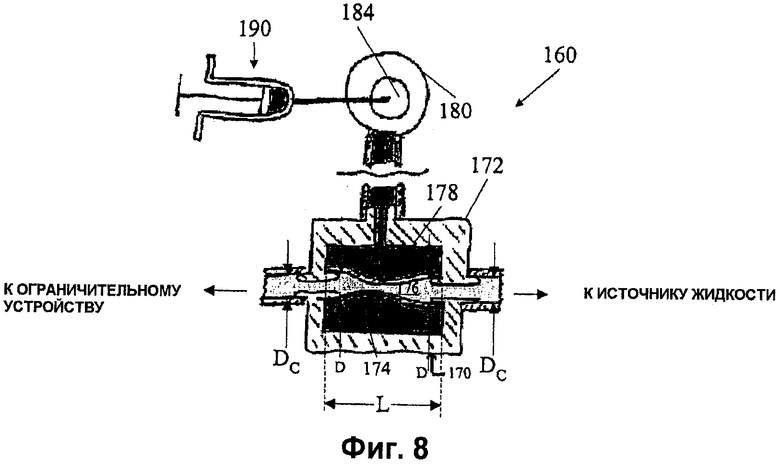
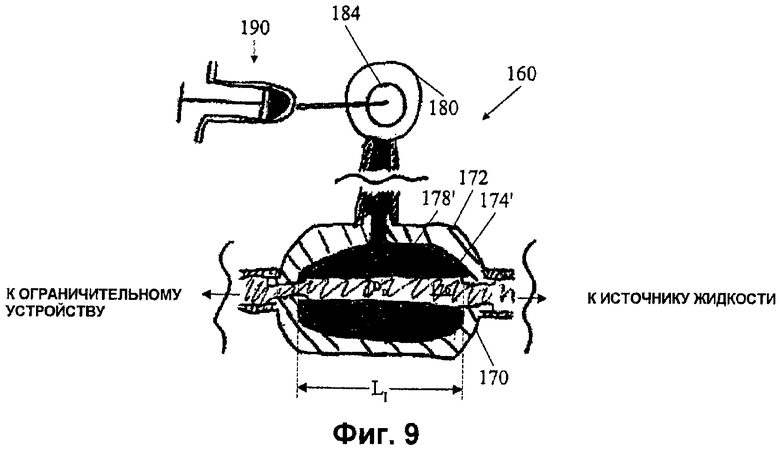
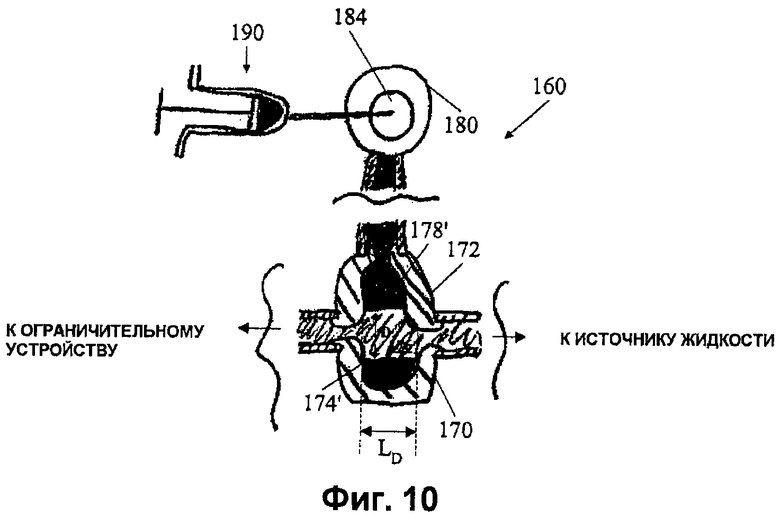
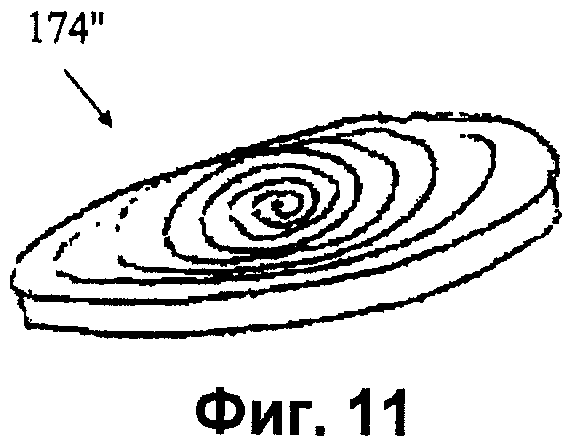
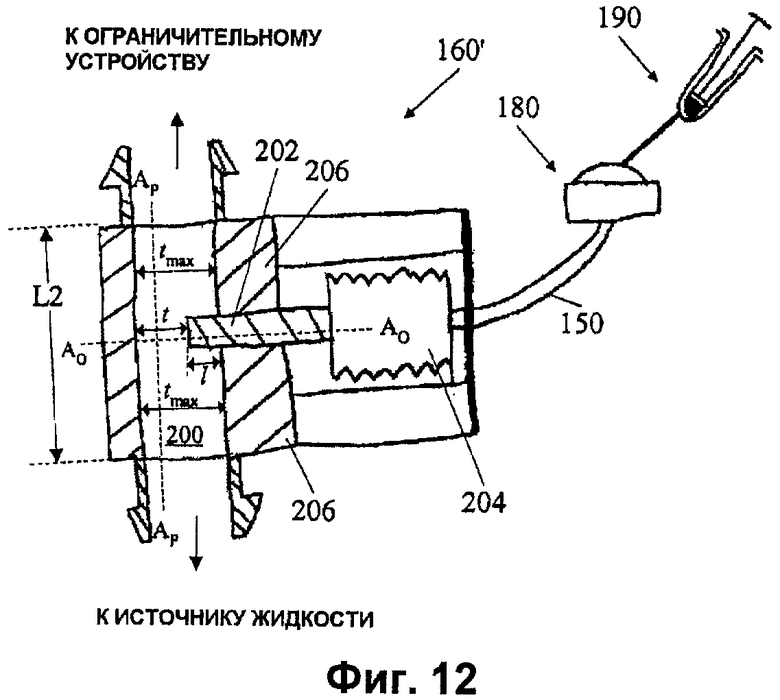
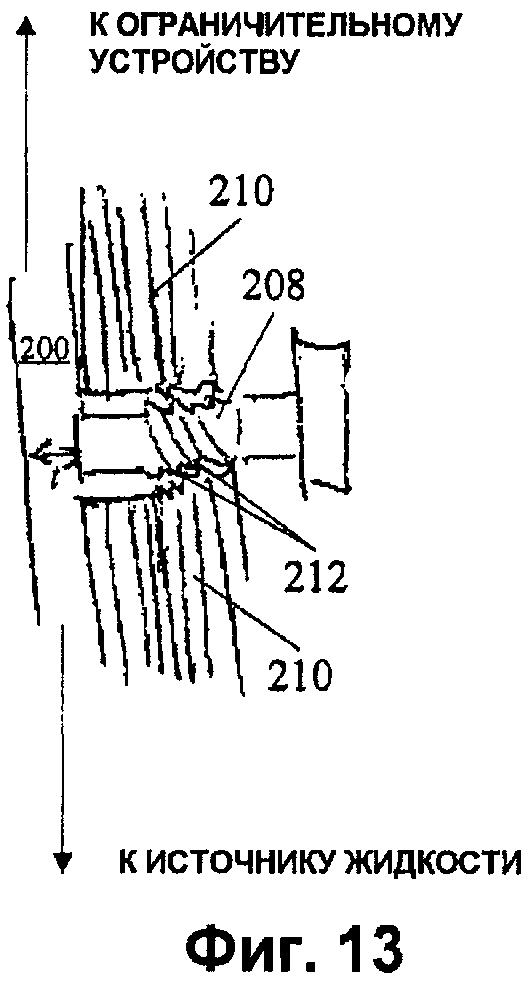
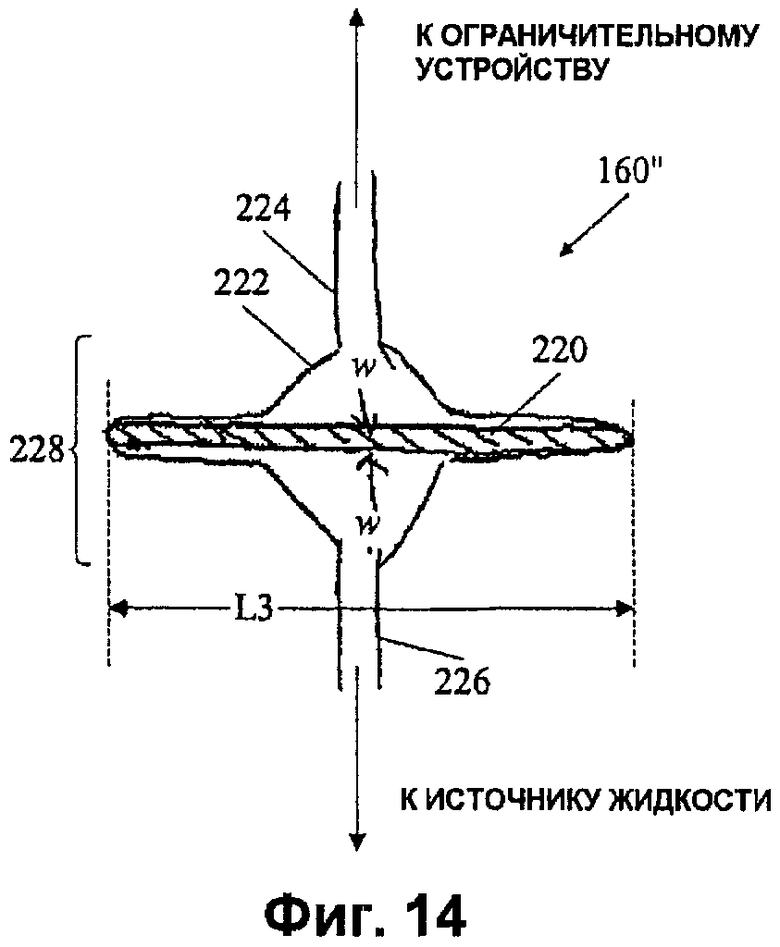
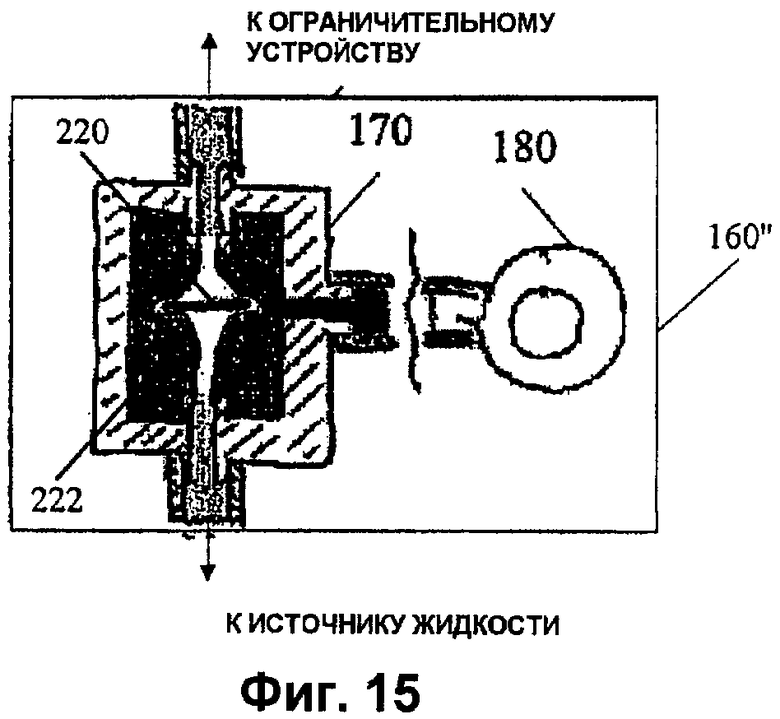
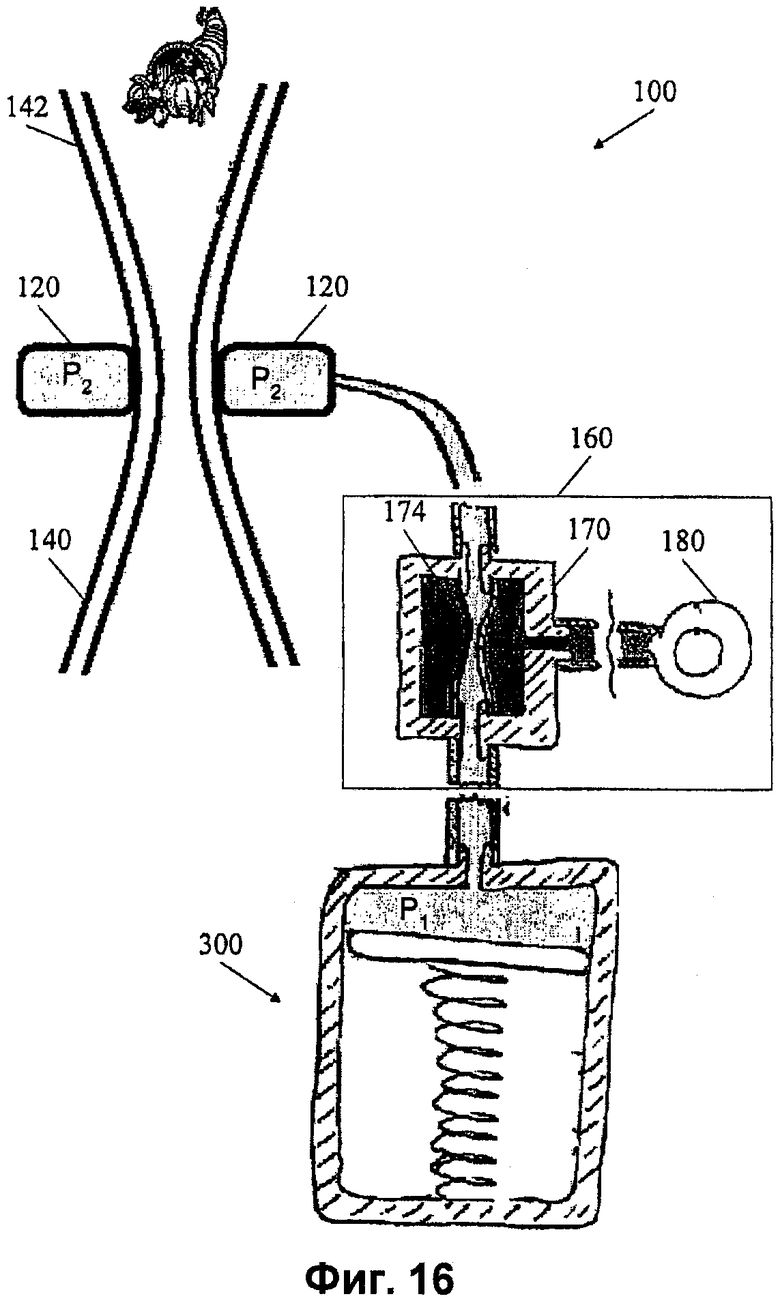

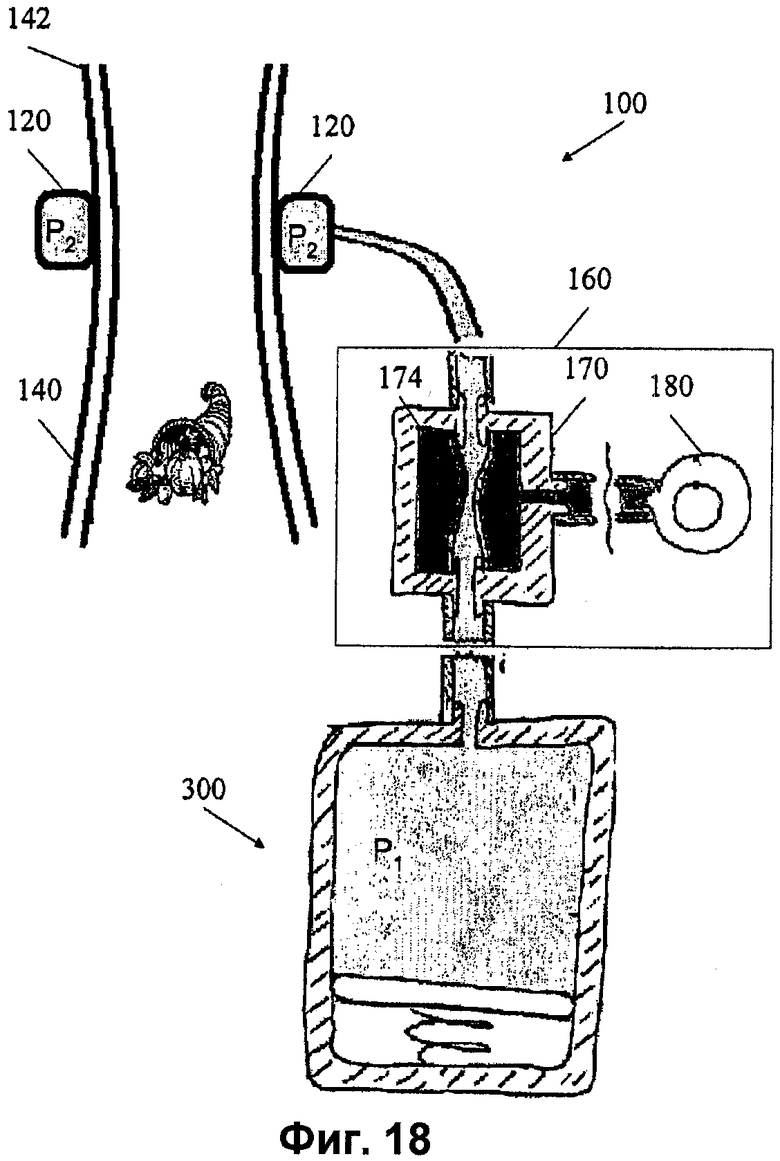
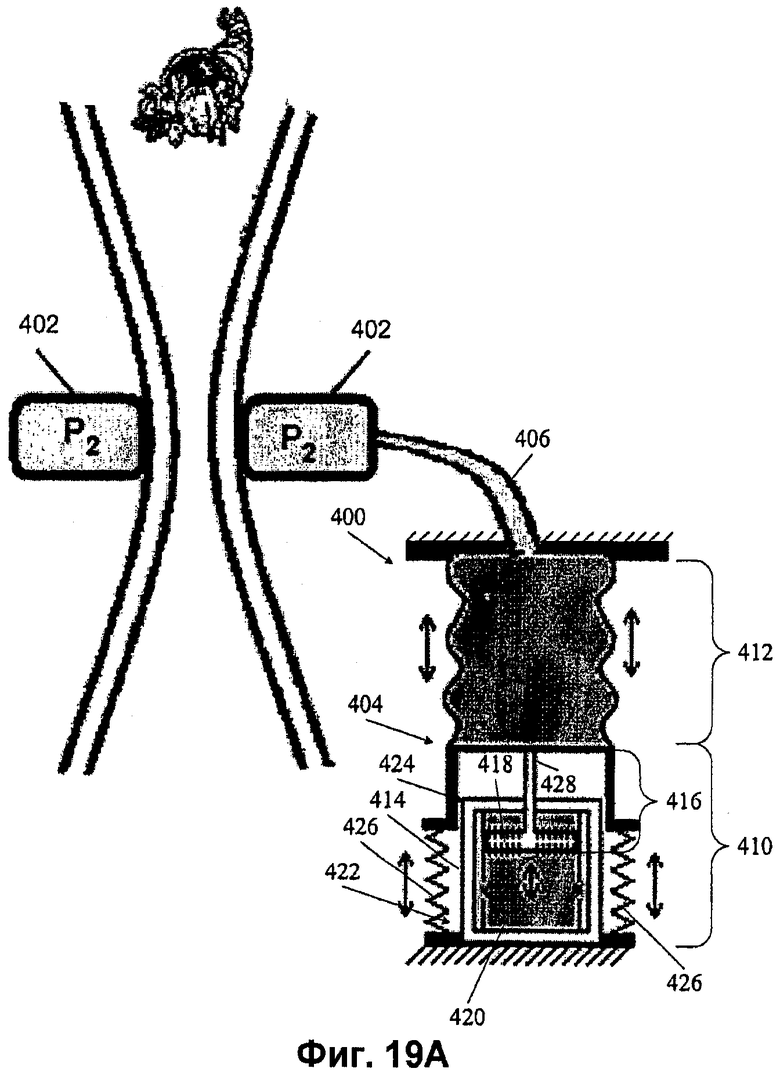
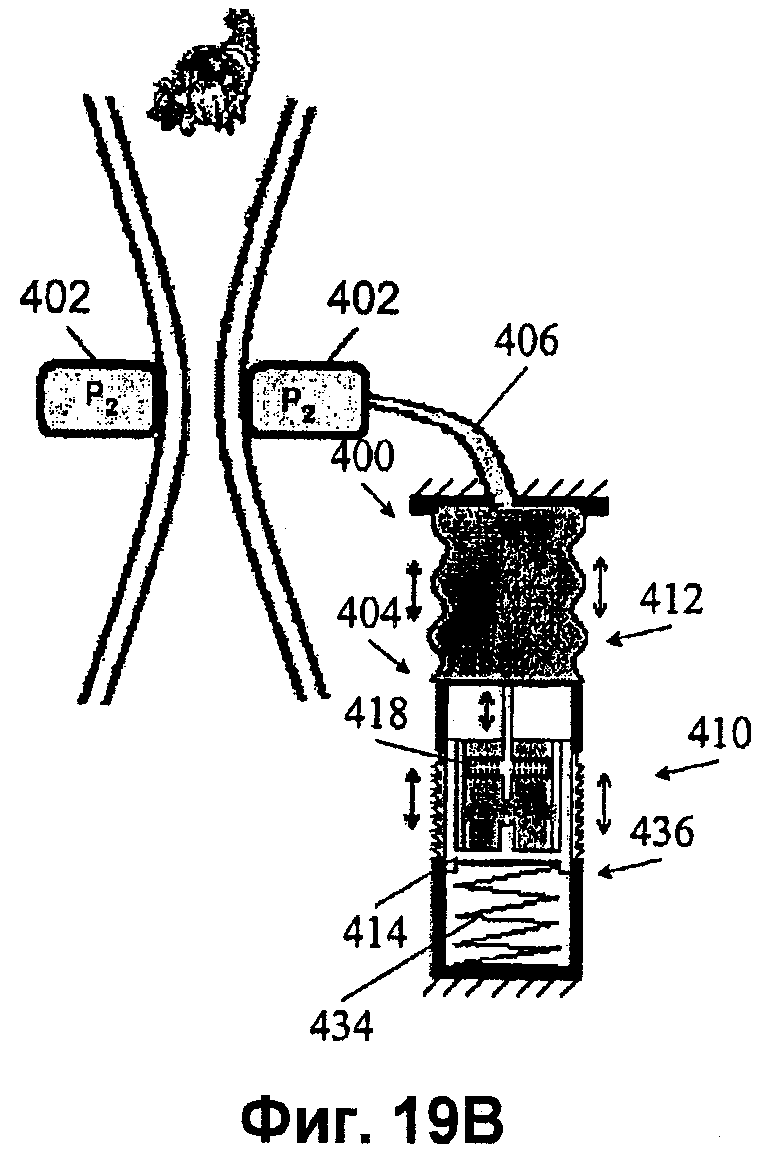
Изобретение относится к медицине. Ограничительная система содержит имплантируемое ограничительное устройство, выполненное с возможностью образования ограничения в проходе в зависимости от объема текучей среды, содержащейся в ограничительном устройстве, и регулируемый механизм для управления потоком, находящийся в связи по текучей среде с ограничительным устройством и выполненный с возможностью установления скорости потока текучей среды, поступающей в ограничительное устройство и выходящей из него. Регулируемый механизм для управления потоком имеет регулируемую геометрию, задающую скорость потока текучей среды, поступающей в ограничительное устройство и выходящей из него. Технический результат состоит в обеспечении управляемого по задержке регулирования давления текучей среды в ограничительном устройстве. 15 з.п. ф-лы, 19 ил.
1. Ограничительная система для образования ограничения у пациента, содержащая:
имплантируемое ограничительное устройство, выполненное с возможностью образования ограничения в проходе в зависимости от объема текучей среды, содержащейся в ограничительном устройстве, и
регулируемый механизм для управления потоком, находящийся в связи по текучей среде с ограничительным устройством и выполненный с возможностью установления скорости потока текучей среды, поступающей в ограничительное устройство и выходящей из него,
при этом регулируемый механизм для управления потоком имеет регулируемую геометрию, задающую скорость потока текучей среды, поступающей в ограничительное устройство и выходящей из него.
2. Система по п.1, в которой механизм для управления потоком текучей среды выполнен с возможностью регулирования между множеством фиксированных положений, причем увеличение объема геометрии приводит к увеличению скорости потока текучей среды, а уменьшение объема геометрии приводит к уменьшению скорости потока текучей среды.
3. Система по п.1, в которой механизм для управления потоком включает в себя гибкую трубку, размещенную в корпусе и находящуюся в связи по текучей среде с ограничительным устройством, причем геометрия гибкой трубки выполнена с возможностью регулирования путем изменения количества текучей среды в пределах корпуса, чтобы тем самым регулировать скорость потока текучей среды.
4. Система по п.3, в которой корпус находится в связи по текучей среде с имплантируемым портом, а количество текучей среды в пределах корпуса выполнено с возможностью изменения через порт.
5. Система по п.1, которая дополнительно содержит резервуар для текучей среды, геометрия которого определяет скорость потока текучей среды между ограничительным устройством и резервуаром для текучей среды.
6. Система по п.1, в которой геометрия представляет собой диаметр.
7. Система по п.1, в которой геометрия механизма для управления потоком такова, что возможно ее регулирование путем линейного перемещения.
8. Система по п.1, в которой механизм для управления потоком включает в себя проход, находящийся в связи по текучей среде с ограничительным устройством, причем геометрия прохода такова, что возможно ее регулирование путем регулировки количественного механизма для создания преграды в проходе.
9. Система по п.1, дополнительно содержащая:
источник текучей среды, находящийся в связи по текучей среде с ограничительным устройством, для приема текучей среды из ограничительного устройства, чтобы уменьшить ограничение, а также для передачи текучей среды в ограничительное устройство, чтобы увеличить ограничение,
где регулируемый механизм для управления потоком размещен между ограничительным устройством и источником текучей среды.
10. Система по п.9, в которой механизм для управления потоком имеет диаметр, регулируемый, по меньшей мере, между двумя положениями, для регулирования скорости потока текучей среды.
11. Система по п.10, в которой увеличение диаметра приводит к увеличению скорости потока текучей среды, а уменьшение диаметра приводит к уменьшению скорости потока текучей среды.
12. Система по п.10, которая дополнительно содержит резервуар для текучей среды под давлением, в котором диаметр определяет скорость потока текучей среды между резервуаром для текучей среды под давлением и ограничительным устройством.
13. Система по п.12, в которой резервуар для текучей среды под давлением включает в себя полость, находящуюся в связи по текучей среде с механизмом для управления потоком, и механизм, выполненный с возможностью приложения смещающего усилия к текучей среде в этой полости.
14. Система по п.12, в которой текучая среда перетекает со скоростью, заданной фиксированным диаметром, от ограничительного устройства через механизм для управления потоком к резервуару для текучей среды, когда давление в ограничительном устройстве превышает давление в резервуаре для текучей среды.
15. Система по п.9, в которой механизм для управления потоком включает в себя гибкую трубку, размещенную в корпусе и имеющую диаметр, который определяет скорость потока текучей среды, причем диаметр гибкой трубки выполнен с возможностью регулирования путем изменения количества текучей среды в пределах корпуса.
16. Система по п.15, в которой корпус находится в связи по текучей среде с имплантируемым портом, а количество текучей среды в пределах корпуса может быть изменено через порт.
| US 20071156013 A1, 05.07.2007 | |||
| WO 00/09047 A, 24.02.2000 | |||
| Раствор для электрохимического полирования изделий из ниобия | 1979 |
|
SU876808A1 |
| EP 1736123 A, 27.12.2006 | |||
| БАНДАЖНОЕ УСТРОЙСТВО ДЛЯ ЖЕЛУДКА | 2000 |
|
RU2255712C2 |

