Настоящее изобретение относится к винтам вращающегося крыла, более конкретно для вертолетов, а также к лопастям для таких винтов.
Известно, что лопастями винта вращающегося крыла управляют по общему шагу и циклическому шагу.
Общий шаг позволяет обеспечить устойчивое висение вертолета, используя идентичную установку положений угла наклона всех лопастей относительно оси вращения упомянутого винта, затем, когда его пилон приводной оси смешивает их, упомянутый общий шаг создает общую силу подъема, которая выровнена с вертикалью и которая уравновешивает общую массу вертолета.
При этом циклический шаг позволяет, путем установки положения угла наклона для каждой лопасти, в зависимости от азимута, наклонять общую силу подъема относительно вертикали и, таким образом, приводить в движение упомянутый вертолет.
Для управления общим шагом и циклическим шагом винты обычно содержат механизм, называемый циклической тарелкой, установленной на пилоне винта, и содержащий вращающуюся тарелку, соединенную с каждой лопастью с помощью штока управления шагом, и приводимую во вращение двухзвенником, при этом неподвижная тарелка скользит вдоль пилона винта и выполнена с возможностью ее наклона относительно последнего и тягой между упомянутыми неподвижной и вращающейся тарелками.
Такая циклическая тарелка является нежелательной, поскольку она содержит большое количество механических деталей, требующих регулярного технического обслуживания и проверки.
Ранее рассматривалась возможность удаления упомянутой циклической тарелки при установке подвижных щитков на упомянутых лопастях, при этом их циклическим шагом управляют путем скручивания упомянутых лопастей, создаваемого крутящим моментом, индуцируемым в результате удлинения упомянутых щитков, и общий шаг лопастей получают либо аналогично тому, как это используется в пропеллерах, или с помощью исполнительного элемента, расположенного на хвостовике лопасти.
Однако такие подвижные щитки также требуют использования сложных и чувствительных к трению механических узлов.
Настоящее изобретение содержит лопасть вращающегося крыла, винт, более конкретно для вертолета, который не содержит какую-либо циклическую тарелку, и способ выполнения для преодоления недостатков предшествующего уровня техники, который представлен выше.
Лопасть крыла, в соответствии с данным изобретением, вращающегося вокруг втулки винта с частотой вращения, упомянутая лопасть, азимут вращения которой известен, с размахом (E), содержащая часть крепления для упомянутой втулки и аэродинамическую часть, и имеющая разные режимы деформации и, более конкретно режим кручения вокруг ее размаха (E) с ее собственной частотой, зависящей от ее жесткости при кручении вокруг упомянутого размаха (E), отличающаяся тем, что:
- она содержит средство динамического скручивания, приблизительно вокруг ее размаха, которое выполнено с возможностью активации его в режиме реального времени, то есть, во время его вращения вокруг упомянутой втулки, по меньшей мере, с частотой вращения упомянутого винта и синхронно с азимутом вращения упомянутой лопасти, так, что такое средство динамического скручивания выполнено с возможностью создания циклического шага, даже в отсутствие циклической тарелки;
- ее жесткость при кручении, которая проявляется под воздействием центробежной силы, приблизительно вокруг ее размаха, достаточно мала, что обеспечивает возможность получения для упомянутого средства динамического скручивания в плоскости ортогонального сечения свободного конца упомянутой лопасти, упругого динамического угла закручивания (υ) для хорды, по меньшей мере, 14° при пикировании или сваливании, оставаясь достаточно высокой так, что собственная частота кручения лопасти вокруг ее размаха будет равна частоте вращения упомянутого винта, для обеспечения возможности динамического скручивания лопасти через резонанс кручения и, таким образом, для сведения к минимуму энергии, требуемой для создания циклического шага;
- ее коэффициент демпфирования, под действием центробежной силы, является строго положительным, чтобы избежать резонансного расхождения разных режимов.
Следует напомнить, что для специалиста в данной области техники хорошо известно, что для получения угла скручивания при заданной амплитуде для механической части, существует доступный способ, состоящий в регулировании мощности исполнительных элементов скручивания, и второй способ, состоящий в регулировании жесткости упомянутой механической части. Решение, воплощенное в данном изобретении, состоит в комбинировании этих двух способов, используя лопасть, которая выполнена менее жесткой при кручении, чем в предшествующем уровне техники, для ограничения веса исполнительных элементов, и обеспечивая доступную амплитуду скручивания, по меньшей мере, 14°, при сваливании или пикировании, для достижения циклического шага. В уровне техники известно другое средство, для уменьшения жесткости при кручении механической части, такой как лопасть: при этом возможно либо выполнить продольную прорезь в оболочке лопасти (так, как в заявке на патент того же заявителя, опубликованной под номером FR 2924681) или использовать структурные, наполнительные материалы или материалы покрытия с меньшей жесткостью при кручении.
Также следует напомнить, что для специалиста в данной области техники известны, как и для любого механика, разные средства для получения строго положительного коэффициента демпфирования лопасти. Он знает, например, пассивный способ, состоящий в добавлении к структуре лопасти материала с коэффициентом демпфирования больше чем 10%, такого, как например, резиновые упоры на хвостовике лопасти; или даже активный способ для активного управления вибрациями.
Кроме того, следует отметить, что материалы и структуру лопасти выбирают таким образом, чтобы обеспечить возможность противостоять скручиванию с амплитудой, по меньшей мере, 14°, при пикировании или сваливании с повторением на частотах, которые могут в несколько раз превышать максимальную частоту вращения винта (случай мультициклического управления скручиванием, для достижения активного управления вибрациями), оставаясь в его поле упругой деформации.
Таким образом, благодаря настоящему изобретению, получают винт вращающегося крыла, более конкретно, для вертолета, в котором можно легко и с малой энергией управлять циклическим шагом, что обеспечивает возможность исключения циклической тарелки, избегая какой-либо связи между ударным режимом и режимом кручения.
Следует отметить, что гибкость лопасти может быть обеспечена либо благодаря креплению, или в аэродинамической части, или в обоих из них. Например, когда, как известно, каждая из упомянутых лопастей состоит, в основном, из аэродинамической части (которая имеет аэродинамически активное изменение шага), соединенной с втулкой винта через более короткую часть крепления, собственная частота кручения (в целом) может быть достигнута путем комбинирования коэффициентов жесткости упомянутой аэродинамической части или упомянутой части крепления. Такая комбинация предпочтительно обеспечивает возможность для соответствующего исполнительного элемента иметь доступный достаточный угловой диапазон кручения для использования в мультициклическом режиме.
Предпочтительно, в соответствии со вторым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с предыдущим вариантом осуществления, отличающуюся тем, что упомянутая часть крепления имеет наблюдаемую жесткость при кручении в 10-100 меньше, чем у аэродинамической части.
Предпочтительно, в соответствии с третьим вариантом осуществления, в данном изобретении представлена лопасть в соответствии с одним из двух предыдущих вариантов осуществления, отличающаяся тем, что:
- ее структура изготовлена из композитного материала;
- ее покрытие является однонаправленным, и направление такого покрытия формирует угол, по существу, равный 0° с размахом упомянутой лопасти, для получения минимальной жесткости при кручении лопасти вокруг размаха.
Предпочтительно, в соответствии с четвертым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с одним из трех предыдущих вариантов осуществления, отличающуюся тем, что в аэродинамической части предусмотрена продольная прорезь на одной из ее нижней или верхней поверхностей крыла, и содержащая:
первый лонжерон, формирующий переднюю кромку, и соседние нижнюю и верхнюю его части и имеющие продольно секущую сторону, формирующую переднюю кромку упомянутой прорези;
второй лонжерон, отделенный от упомянутого первого лонжерона упомянутой прорезью и имеющий продольную секущую сторону, формирующую заднюю кромку упомянутой прорези;
оболочку, формирующую нижнюю и верхнюю поверхности упомянутой лопасти, продольно прорезанную упомянутой прорезью и включающую упомянутый первый и второй лонжероны, будучи соединенной с ними;
материал наполнения для упомянутой оболочки;
средство динамического скручивания содержит исполнительный элемент динамического скручивания, выполненный с возможностью создания относительного скольжения между кромками упомянутой прорези; и
упомянутая оболочка изготовлена из композитного материала из волокна со смолой так, что, по меньшей мере, большая часть волокон расположена так, что они формируют угол, который, по существу, равен 0°, с размахом упомянутой лопасти.
Предпочтительно, в соответствии с пятым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с предыдущим вариантом осуществления, отличающуюся тем, что с обеих сторон упомянутой прорези, в непосредственной близости к последней, упомянутая оболочка жестко соединена с упомянутым первым и вторым лонжеронами, и что снаружи в непосредственной близости к упомянутой прорези, упомянутая оболочка соединена с остальной частью упомянутой лопасти через соединение, изготовленное из упругого материала с коэффициентом демпфирования больше чем 10%, который позволяет фильтровать вибрации лопасти, такого как эластомер, и распределенного непрерывно или с разрывами, между упомянутой оболочкой и упомянутой остальной частью лопасти.
Таким образом, снаружи, в непосредственной близости к прорези (выполненной непрерывно или раздельно) обеспечивается соединение с низким модулем упругости и адаптированным демпфированием, позволяющими:
- существенно уменьшить жесткость при кручении при поддержании ударной и аэродинамической жесткости,
- свести к минимуму частоту первого собственного режима кручения лопасти относительно близко к частоте вращения, и
- получить демпфирования упомянутого режима кручения, так, чтобы необязательное соединение с первыми ударным режимом и режимом аэродинамического сопротивления не являлось бы нестабильным аэроупругим соединением.
С другой стороны, в непосредственной близости к упомянутой прорези, жесткое соединение, например, с использованием клея, обеспечивает хорошую передачу движения исполнительного элемента, позволяющую легко выполнять скручивание лопасти.
Предпочтительно, в соответствии с шестым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с четвертым или пятым предыдущими вариантами осуществления, отличающуюся тем, что упомянутый материал наполнения представляет собой жесткий или полужесткий пеноматериал.
Такой жесткий или полужесткий материал обеспечивает, с другой стороны, усиление фильтрации вибрации (упомянутых режимов деформации) лопасти.
Предпочтительно, в соответствии с седьмым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с одним из предыдущих четвертым - шестым вариантами осуществления, отличающуюся тем, что она содержит полоску упругого материала с коэффициентом демпфирования выше чем 10%, выполненную с возможностью фильтрации собственной частоты кручения лопасти, такого, как, например, эластомер, и упомянутая полоска закрывает прорезь.
Предпочтительно, в соответствии с восьмым вариантом осуществления, данное изобретение представляет собой лопасть в соответствии с одним из предыдущих четвертым - седьмым вариантам осуществления, отличающуюся тем, что исполнительный элемент динамического скручивания расположен на его свободном конце так, чтобы способствовать его установке и его техническому обслуживанию.
На каждой лопасти соответствующий исполнительный элемент может быть электрическим, механическим или гидравлическим. Однако, предпочтительно, он является элементом пьезоэлектрического типа, аналогично исполнительному элементу, раскрытому в WO 2009/103865.
Каким бы ни был исполнительный элемент, он может быть расположен вдоль аэродинамической части лопасти или на ее части крепления.
Однако, предпочтительно, в каждой лопасти, исполнительный элемент расположен на ее свободном конце, что способствует его установке и техническому обслуживанию.
Кроме того, было бы предпочтительно, чтобы профиль каждой лопасти был выполнен (или даже был бы управляемым), более конкретно, в зависимости от угла падения и наблюдаемой жесткости лопасти.
Предпочтительно, в соответствии с девятым вариантом осуществления, данное изобретение направлено на лопасть, в соответствии с одним из первого - восьмого вариантов осуществления, отличающуюся тем, что средство динамического скручивания имеет такие размеры, чтобы они имели возможность достижения на кратных частотах частоты вращения такого винта и синхронно с азимутом вращения упомянутой лопасти, амплитуды упомянутого угла упругого динамического скручивания, по меньшей мере, равной, по абсолютному значению, максимальной амплитуде разных режимов деформации на этих кратных тех же самых частотах частоты вращения, с тем, чтобы обеспечить возможность выполнения мультициклического активного управления вибрациями.
Предпочтительно, в соответствии с десятым вариантом осуществления, данное изобретение направлено на лопасть, в соответствии с одним из первого - девятого вариантов осуществления, отличающуюся тем, что ее часть крепления на втулке содержит средство для последовательного управления ее собственной частотой кручения, под действием центробежной силы, вокруг ее размаха, выполненное с возможностью синхронизации, во время ее вращения вокруг упомянутой втулки, упомянутой собственной частоты кручения, по существу, с частотой вращения винта.
Предпочтительно, в соответствии с одиннадцатым вариантом осуществления, данное изобретение направлено на лопасть в соответствии с десятым вариантом осуществления, отличающуюся тем, что упомянутое средство для последовательного управления ее собственной частотой регулирует упомянутую собственную частоту, регулируя жесткость при кручении, которая проявляется под действием центробежной силы, приблизительно вокруг ее размаха, ее части крепления.
Предпочтительно, в соответствии с двенадцатым вариантом осуществления, настоящее изобретение направлено на винт, в котором вращающееся крыло во вращении вокруг своей втулки с частотой вращения, заключенной между нижней частотой вращения и верхней частотой вращения, содержит, по меньшей мере, две лопасти, в соответствии с одним из предыдущих вариантов осуществления, азимуты вращения которых известны, упомянутый винт отличается тем, что он содержит:
средство для управления средством динамического скручивания каждой из упомянутых лопастей, выполненное с возможностью, даже в отсутствие циклической тарелки, управлять в режиме реального времени, то есть, с частотой, по меньшей мере, равной частоте вращения, во время вращения упомянутых лопастей, и синхронно с их азимутом вращения, циклическим шагом для каждой из упомянутых лопастей;
средство для последовательного управления собственной частотой кручения под действием центробежной силы, каждой из упомянутых лопастей вокруг их размаха, выполненное с возможностью синхронизации, во время такого вращения, каждой собственной частоты кручения, по существу, на частоте вращения винта, с тем, чтобы обеспечить преимущество резонанса кручения вокруг их размаха, с тем, чтобы свести к минимуму мощность, требуемую для создания циклического шага через динамическое скручивание.
Предпочтительно, в соответствии с тринадцатым вариантом осуществления, данное изобретение направлено на винт в соответствии с двенадцатым предыдущим вариантом осуществления, отличающийся тем, что упомянутое средство для управления средством динамического скручивания также выполнено с возможностью, в отсутствие циклической тарелки, управлять общим шагом упомянутых лопастей во время вращения упомянутого винта.
Предпочтительно, в соответствии с четырнадцатым вариантом осуществления, данное изобретение направлено винт в соответствии с одним из предыдущих двенадцатым - тринадцатым вариантами осуществления, отличающийся тем, что упомянутое средство для последовательного управления собственной частотой кручения выполнено с возможностью регулировать, в обоих направлениях, собственную частоту кручения под действием центробежной силы, вокруг ее размаха для каждой из упомянутых лопастей, между минимальным значением, соответствующим нижней частоте вращения винта, и максимальным значением, соответствующим верхней частоте вращения упомянутого винта, упомянутое средство представляет собой, например, средство для придания жесткости части крепления каждой упомянутой лопасти в соответствии с любым из пп.2-10, обеспечивая возможность регулирования жесткости при кручении, проявляющейся под действием центробежной силы, каждой упомянутой лопасти вокруг ее размаха, между минимальным значением, соответствующим упомянутой жесткости каждой лопасти, которой не была придана жесткость с помощью упомянутого средства, и максимальным значением, соответствующим упомянутой жесткости аэродинамической части каждой упомянутой лопасти.
Предпочтительно, в соответствии с пятнадцатым вариантом осуществления, данное изобретение направлено на винт в соответствии с одним из двенадцатого - четырнадцатого предыдущих вариантов осуществления, отличающийся тем, что он содержит средство спонтанного действия, выполненное с возможностью задавать к каждой из упомянутых лопастей, в случае отказа упомянутого средства управления, что упомянутая собственная частота, возникающая под действием центробежной силы кручения каждой из упомянутых лопастей, равна собственной частоте кручения, возникающей под действием центробежной силы их аэродинамической части, для исключения какого-либо расхождения резонанса кручения для упомянутых лопастей.
Предпочтительно, в соответствии с шестнадцатым вариантом осуществления, данное изобретение направлено на способ динамического скручивания, по меньшей мере, для одной лопасти крыла, вращающегося вокруг втулки винта с частотой вращения, в диапазоне от нижней частоты вращения и до верхней частоты вращения, упомянутая лопасть имеет известный азимут вращения, имеет размах, содержит средство крепления для упомянутой втулки и аэродинамическую часть, и имеет разные режимы деформации, в частности, режим кручения вокруг ее размаха с собственной частотой, в зависимости от ее жесткости при кручении вокруг упомянутого размаха, отличающаяся тем, что содержит следующие задачи:
- управляют в режиме реального времени посредством средства динамического скручивания, то есть, на частоте, по меньшей мере, равной частоте вращения упомянутого винта, во время вращения каждой упомянутой лопасти и синхронно с азимутом вращения каждой упомянутой лопасти, при этом угол (υ) упругого динамического скручивания хорды в плоскости ортогонального сечения свободного конца каждой упомянутой лопасти, по меньшей мере, 14°, при пикировании или сваливании, так, что средство динамического скручивания выполнено с возможностью создавать циклический шаг даже в отсутствие циклической тарелки;
- управляют, используя средство, собственной частотой кручения, возникающей под действием центробежной силы, приблизительно вокруг размаха каждой упомянутой лопасти, так, чтобы она была, по существу, равна частоте вращения вокруг упомянутого винта и чтобы, следовательно, упомянутое упругое динамическое скручивание достигалось при минимальной мощности через резонанс кручения; и
- фильтруют собственные частоты разных режимов деформации каждой упомянутой лопасти для исключения какого-либо расхождения резонанса.
Предпочтительно, в соответствии с семнадцатым вариантом осуществления настоящее изобретение направлено на способ в соответствии с шестнадцатым предыдущим вариантом осуществления, отличающийся тем, что управление средством динамического скручивания является мультициклическим, то есть выполняется на частоте, составляющей кратное значение частоты вращения упомянутого винта, для активного управления разными режимами деформации упомянутых лопастей, в дополнение к управлению их циклическим шагом.
Предпочтительно, в соответствии с восемнадцатым вариантом осуществления, данное изобретение направлено на способ в соответствии с одним из предыдущих шестнадцатого - семнадцатого предыдущих вариантов осуществления, отличающийся тем, что управление средством динамического скручивания управляет общим шагом упомянутых лопастей, в дополнение к управлению их циклическим шагом.
Предпочтительно, в соответствии с девятнадцатым вариантом осуществления, данное изобретение направлено на способ в соответствии с одним из шестнадцатого - восемнадцатого предыдущих вариантов осуществления, отличающийся тем, что управление собственной частотой кручения, возникающей под действием центробежной силы, приблизительно вокруг ее размаха, каждой упомянутой лопасти, получают путем последовательного управления жесткостью при кручении, возникающей под действием центробежной силы, приблизительно вокруг ее размаха, части крепления каждой упомянутой лопасти, причем упомянутая часть крепления, будучи более гибкой, чем соответствующая аэродинамическая часть, выполнена с возможностью придания ей жесткости, вплоть до максимального значения, равного наблюдаемой жесткости при скручивании, вокруг ее размаха упомянутой аэродинамической части.
Предпочтительно, в соответствии с двадцатым вариантом осуществления, настоящее изобретение направлено на способ в соответствии с одним из шестнадцатого - семнадцатого предыдущих вариантов осуществления, отличающийся тем, что он содержит задачу, обеспечивающую, в случае отказа упомянутого средства управления, что собственная частота, под действием центробежной силы кручения каждой из упомянутых лопастей вокруг ее размаха, равна собственной частоте кручения, возникающей под действием центробежной силы, их аэродинамической части вокруг их размаха, для исключения какого-либо расхождения резонанса кручения упомянутых лопастей.
Приложенные чертежи лучше поясняют воплощение настоящего изобретения. На этих чертежах одинаковые номера ссылочных позиций относятся к одинаковым компонентам.
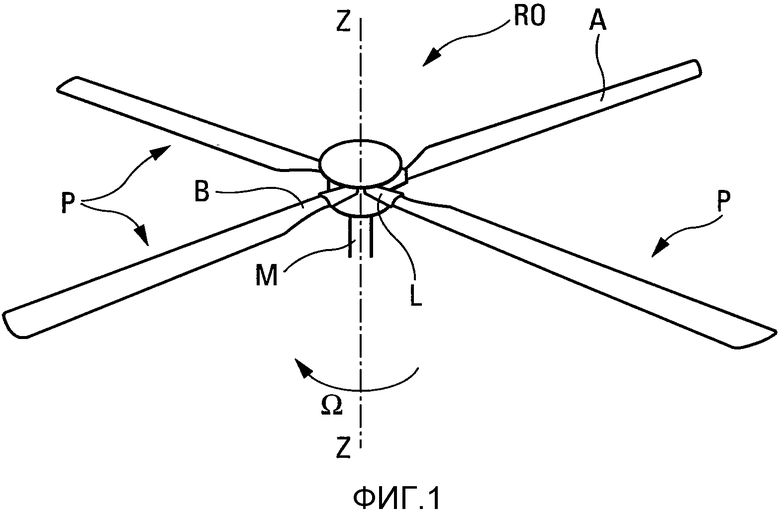
На фиг. 1 схематично показан вид в перспективе винта вращающегося крыла вертолета.
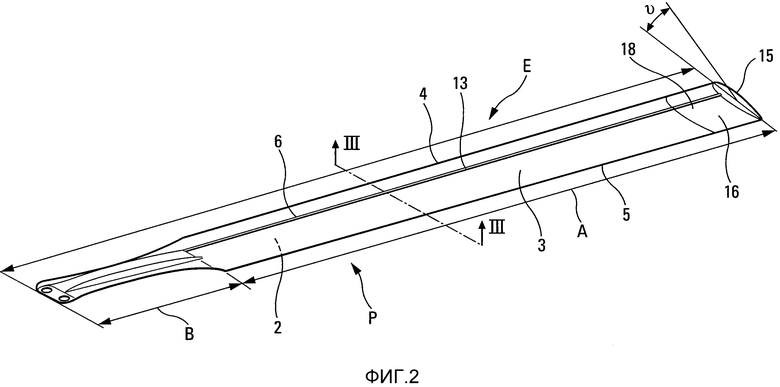
На фиг. 2 показан вид в перспективе, со стороны нижней поверхности лопасти винта вращающегося крыла вертолета в соответствии с настоящим изобретением.
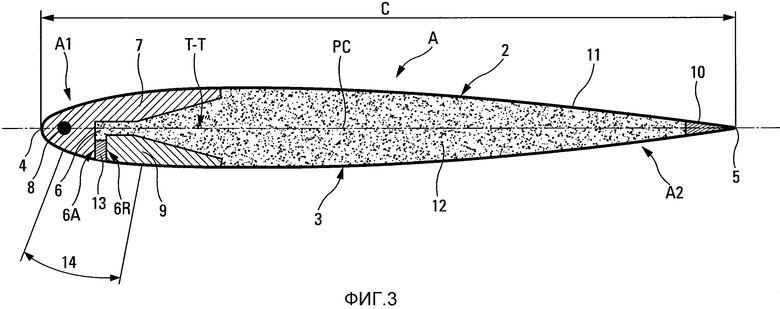
На фиг. 3 схематично показан вид в разрезе лопасти по фиг. 2 вдоль линии III-III на последней фигуре.
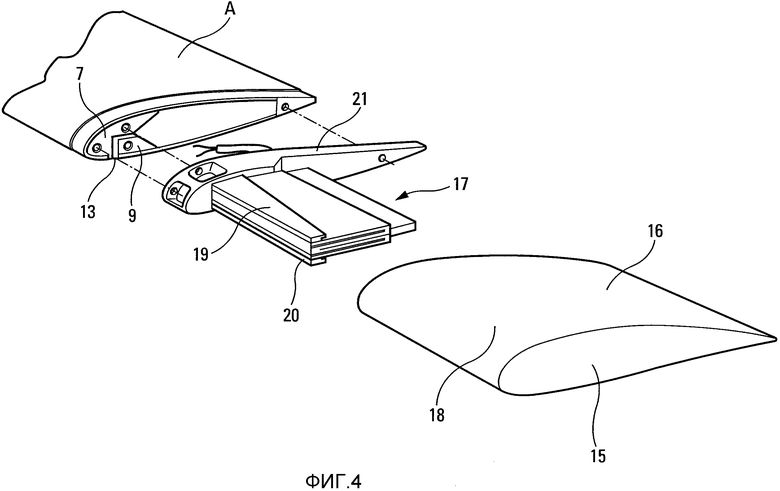
На фиг. 4 показано покомпонентное представление с увеличением деталей с видом в перспективе конца лопасти по фиг. 2, со стороны верхней поверхности.
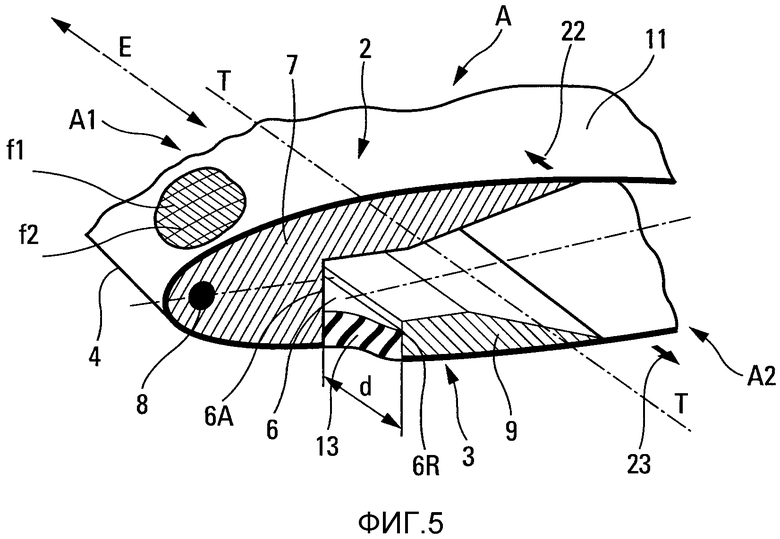
На фиг. 5 схематично показан вид в перспективе скручивания лопасти по фиг. 2, создаваемого исполнительным элементом на конце лопасти, показанным на фиг. 4.
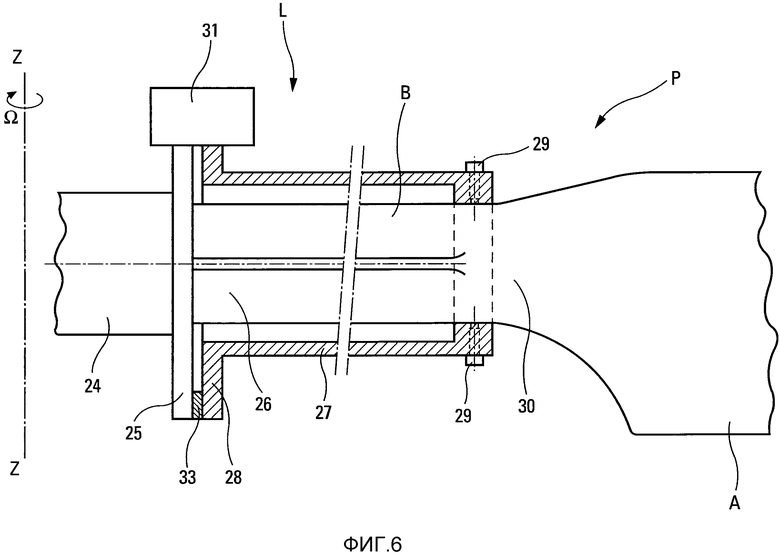
На фиг. 6 схематично показано средство управления, которое выполнено с возможностью последовательно регулировать собственную частоту кручения каждой лопасти винта в соответствии с настоящим изобретением.
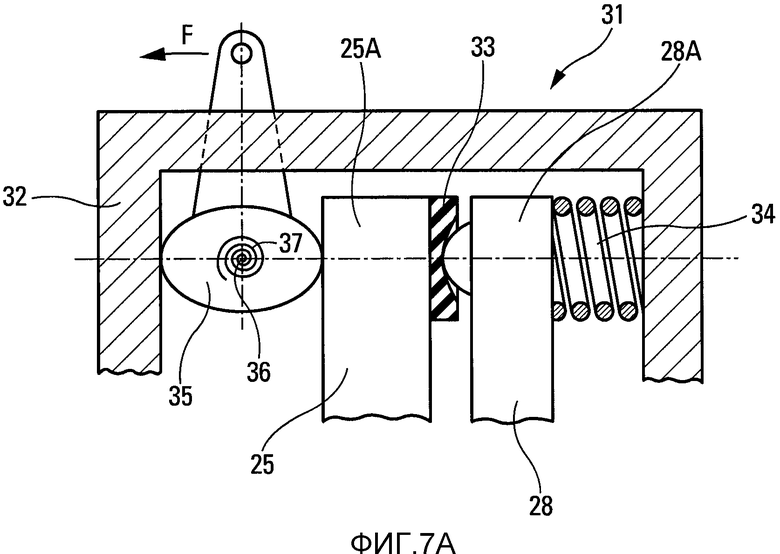
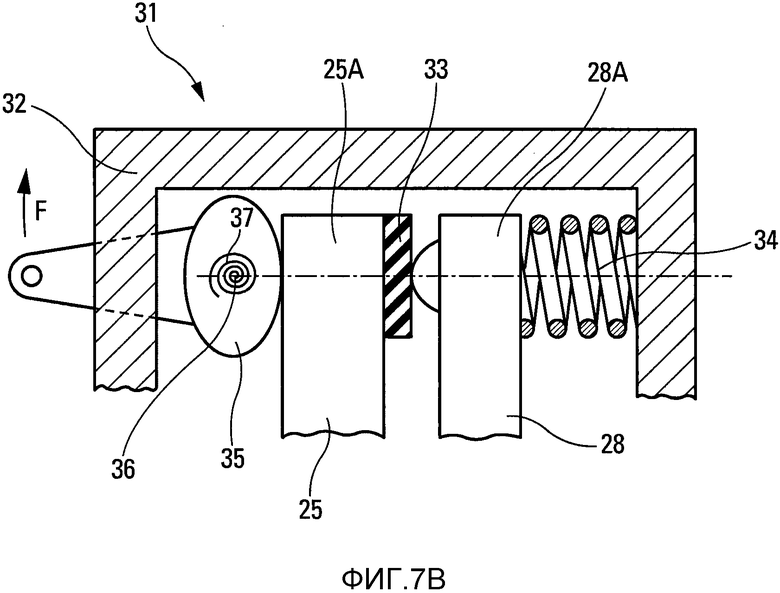
На фиг. 7A и 7B иллюстрируются блок-схемы последовательности операций средства управления по фиг. 6, последнее, соответственно, установлено в положении, соответствующем фиксации на максимуме собственной частоты кручения (фиг. 7A) и разблокированию на минимуме собственной частоты кручения (фиг. 7B).
Винт RO вращающегося крыла для вертолета, схематично показанный на фиг. 1, содержит втулку M, приводимую во вращение вокруг ее оси Z-Z через главный редуктор (не показан), и лопасти P, поперечно соединенные с упомянутой втулкой M через устройство L крепления. Таким образом, лопасти P могут вращаться вокруг оси Z-Z, с частотой Ω вращения упомянутой втулки M.
Как показано на фиг. 2, лопасть P, в соответствии с настоящим изобретением, содержит аэродинамическую часть A и часть B крепления, которая короче, чем упомянутая часть A.
Часть B крепления, например, с крестовидным сечением, взаимодействует с устройством L крепления для крепления лопасти P на втулке M.
Аэродинамическая часть A содержит верхнюю поверхность 2 и нижнюю поверхность 3, формирующие, впереди, переднюю кромку 4 и, сзади, заднюю кромку 5.
В непосредственной близости к передней кромке 4 (см. также фиг. 3) нижняя поверхность 3 разрезана в виде продольной прорези 6, которая продольно распределяет упомянутую аэродинамическую часть A (в соответствии с размахом E) на переднюю продольную часть A1, содержащую упомянутую переднюю кромку 4, и заднюю продольную часть A2, содержащую упомянутую заднюю кромку 5. С другой стороны, упомянутая передняя A1 и задняя A2 продольные части в целом сформированы через верхнюю поверхность 2, являющуюся непрерывной.
В варианте осуществления, показанном на фиг. 3, упомянутая аэродинамическая часть A содержит:
- лонжерон 7 передней кромки, формирующий упомянутую переднюю кромку 4 и части верхней поверхности 2 и нижней поверхности 3, соседние с нею; такой лонжерон 7 может быть изготовлен из композитного материала из волокон со смолой (например, стекло-эпоксидного или углеродно-эпоксидного) и, возможно, содержит балластную массу 8, распределенную вдоль передней кромки 4;
- лонжерон 9 нижней поверхности, отделенный от лонжерона 7 передней кромки продольной прорезью 6 на нижней поверхности, передняя кромка 6A прорези сформирована продольно секущей стороной лонжерона 7 передней кромки, тогда как задняя кромка 6R упомянутой продольной прорези 6 сформирована продольно секущей стороной лонжерона 9 нижней поверхности; последний также может быть изготовлен из композитного материала из волокон со смолой;
- лонжерон 10 гребня, формирующий заднюю кромку 5 и, например, изготовленный из композитного материала из волокон со смолой;
- оболочку 11, формирующую верхнюю поверхность 2 и нижнюю поверхность 3 (прерванную прорезью 6) и окружающую лонжероны 7, 9 и 10, будучи одновременно выполненной, как единая деталь с ними;
- материал 12 наполнения, например, жесткий пеноматериал с низким модулем упругости (например, полиуретан), заполняющий упомянутую оболочку 11 между упомянутыми лонжеронами 7, 9 и 10; и
- полоску 13 из эластомерного материала с низким модулем упругости, которая закрывает прорезь 6 и которая выполнена, как единая деталь (предпочтительно с помощью клея) с кромками 6A и 6B последней.
Оболочка 11 изготовлена из материала из волокон со смолой (например, из углеродных волокон), и такие волокна f1 расположены продольно относительно упомянутой аэродинамической части лопасти, то есть в соответствии с упомянутым размахом E. Возможно, упомянутая оболочка может содержать волокна f2, расположенные ортогонально упомянутому размаху, но не содержит какие-либо волокна, расположенные под наклоном к последнему (см. вид в разрезе оболочки 11, показанной на фиг. 5).
Кроме того, в области 14, расположенной рядом с прорезью 6 и продолжающейся на обе части последней, оболочка 11 жестко скреплена, например, с помощью клея, с лонжероном 7 передней кромки и упомянутым лонжероном 9 нижней поверхности. В отличие от этого, за пределами области 14, оболочка 11 соединена с лонжеронами 7, 9, 10 и с материалом 12 наполнения с помощью соединительного слоя демпфирующего материала с низким модулем упругости. Такой соединительный слой (не показан с целью обеспечения ясности представления на чертеже) может быть непрерывным или может быть установлен с разрывами и может быть сформирован из эластомерного материала.
Должно быть понятно, что в результате получают аэродинамическую часть A, которая выполнена с малой жесткостью при кручении вокруг размаха E, которая, однако, выполнена как жесткая цельная часть вокруг прорези 6, между лонжероном 7 передней кромки 7 и лонжероном 9 нижней поверхности, с одной стороны, и оболочкой 11, с другой стороны. Благодаря выбору части B крепления еще менее жесткой при кручении вокруг лонжерона, чем аэродинамическая часть A (например, в 10-100 раз меньше), лопасть P выполнена с возможностью поддерживать кручение, создаваемое на хвостовике лопасти, то есть на стороне 15 свободного конца 16 последней, с углом υ упругого динамического скручивания, по меньшей мере, 14°.
Кроме того, на свободном конце 16 лопасти P исполнительный элемент 17 вставлен в продолжение аэродинамической части A (см. фиг. 4). Исполнительный элемент 17 является пьезоэлектрическим и аналогичен тому, что описано в документе EP - 1,788,646, и на который здесь сделана явная ссылка. Когда пьезоэлектрический исполнительный элемент 17 закрепляют в верхней части аэродинамической части A, он располагается, по меньшей мере, частично в плоскости ее хорды PC. Съемный кожух 18 окружает и защищает пьезоэлектрический исполнительный элемент 16 и оконечную сторону 15 лопасти.
Пьезоэлектрический исполнительный элемент 17 прикладывает действие сдвига и содержит две поверхности 19 и 20, выполненные с возможностью скольжения относительно друг друга, когда к упомянутому исполнительному элементу подают электричество. Через соединительную часть 21, поверхность 19 сформирована целиком с лонжероном 7 передней кромки, в то время как поверхность 20 целиком сформирована с лонжероном 9 нижней поверхности.
Таким образом, как показано на фиг. 5, когда упомянутый исполнительный элемент 17 возбуждается, он создает скольжение d между упомянутыми поверхностями 19 и 20, такое скольжение направлено в соответствии с размахом и передается на лонжероны 7 и 9, движущиеся относительно друг друга. Таким образом, в результате, возникает относительное движение между передней частью A1 и задней частью A2 (схематично иллюстрируется стрелками 22 и 23 на фиг. 5), и продольным изгибом оболочки 11, в результате чего происходит деформация кручения лопасти P вокруг оси T-T кручения, расположенной в плоскости хорды PC и направленной в соответствии с размахом E. Очевидно, что на полосу 13 также воздействует деформация сдвига (см. фиг. 5).
На фиг. 6 схематично представлен примерный вариант осуществления устройства L крепления лопасти P таким образом, что последняя может вращаться вокруг оси Z-Z винта RO. В этом примерном варианте осуществления устройство L крепления содержит:
- втулку 24 лопасти, выполненную как единая деталь с втулкой R винта RO, с использованием любого известного средства, не показано;
- фланец (или участок фланца) 25, выполненный как единая деталь при вращении, с одной стороны, с упомянутой втулкой 24 лопасти и, с другой стороны, с внутренним концом 26 части B крепления лопасти P;
- жесткую муфту (или участок муфты) 27, окружающую, с большим зазором, упомянутую часть B крепления, упомянутую муфту 27, с одной стороны, содержит фланец (или участок фланца) 28, расположенный противоположно фланцу 25 и, с другой стороны, выполненный как единая деталь, через средство 29 крепления, с участком 30 лопасти, составляя переход между аэродинамической частью A и частью B крепления; и
- по меньшей мере, одно устройство 31, выполненное с возможностью последовательного изменения давления между фланцами 25 и 28.
Как показано на фиг. 7A и 7B, края 25A и 25B фланцев 25 и 28, выполненные с возможностью воздействия на них незначительной упругой деформации, расположены внутри подвижного хомута 32 устройства 31 и находятся во взаимном контакте через упругие блоки 33, которые расположены между ними.
На края 25A и 25B воздействует, с одной стороны, действие пружины 34 и, с другой стороны, действие управляемого кулачка 35, упомянутая пружина 34 и упомянутый кулачок расположены на подвижном хомуте 32, с тем, чтобы прикладывать взаимно противоположные воздействия к упомянутым краям 25A и 25B.
Кулачок 35 установлен с возможностью вращения вокруг оси 36, установленной на хомуте 31, и может поворачиваться вокруг упомянутой оси под управлением исполнительного элемента, представленного стрелками F.
Возвратная пружина 37 выполнена с возможностью установки кулачка 35 в положение, показанное на фиг. 7A, в случае отказа кулачкового исполнительного элемента F.
В ситуации, представленной на фиг. 7A, кулачок толкает края 25A и 28A, толкая пружину 34, таким образом, что давление, приложенное между фланцами 25 и 28, будет большим. В таком случае муфта 27 выполнена как единая деталь со втулкой 24 лопастей, и исполнительный элемент 17 скручивания не может прикладывать какое-либо действие к части B крепления лопасти, и только аэродинамическая часть А выполнена с возможностью ее скручивания. Естественно, в результате, собственная частота кручения лопасти P в этом случае будет максимальной и идентичной собственной частоте упомянутой аэродинамической части A.
В отличие от этого, в ситуации, представленной на фиг. 7B, пружина 34 расправлена и толкает края 25A и 28A к кулачку 35, таким образом, что давление между фланцами 25 и 28 будет слабым, и даже пренебрежительно малым. Муфта 27, таким образом, отсоединяется от втулки 24 лопасти, и исполнительный элемент 17 скручивания может прикладывать свое действие ко всем частям A и B лопасти. Собственная частота кручения лопасти P при этом является минимальной.
Очевидно, через управление вращением кулачка 35 вокруг его оси 36 между положениями, показанными на фиг. 7A и 7B, возможно последовательно изменять, в обоих направлениях, собственную частоту кручения всей лопасти, содержащей ее части A и B, и максимальное значение, соответствующее собственной частоте кручения только аэродинамической части A.
Кроме того, следует отметить, что в случае отказа исполнительного элемента F или исполнительного элемента 17, например, из-за проблемы с подачей электричества, или даже в случае возникновения расхождения скручивания лопасти, возвратная пружина 37 возвращается обратно в ситуацию по фиг. 7A, которая соответствует максимальной собственной частоте кручения.
Изобретение относится к области авиации, в частности к конструкциям лопастей несущих винтов. Лопасть (Р) крыла с размахом (Е), вращающаяся вокруг втулки (М) винта (RO) с частотой (Ω) вращения, азимут вращения которой известен, имеющая разные режимы деформации, в частности режим кручения вокруг ее размаха (Е) с ее собственной частотой, содержит часть (В) крепления втулки, аэродинамическую часть (А), средство (17) динамического скручивания вокруг ее размаха (Е). Средство (17) динамического скручивания выполнено с возможностью его активации в режиме реального времени, т.е. во время вращения вокруг упомянутой втулки с частотой (Ω) вращения винта, и создания циклического шага при отсутствии в конструкции циклической тарелки. Жесткость лопасти при кручении под действием центробежной силы вокруг ее размаха мала, что обеспечивает возможность получения при воздействии средства динамического скручивания упругого динамического угла закручивания (υ) хорды, по меньшей мере, 14º при пикировании или при сваливании, при этом собственная частота кручения лопасти вокруг ее размаха будет равна частоте вращения винта, что обеспечивает возможность динамического скручивания лопасти через резонанс кручения. Достигается снижение к минимуму затрат энергии, требуемой для создания циклического шага. 3 н. и 17 з.п. ф-лы, 8 ил.
1. Лопасть (P) крыла, вращающаяся вокруг втулки (M) винта (RO) с частотой (Ω) вращения, упомянутая лопасть (P), азимут вращения которой известен, с размахом (E), содержащая часть (B) крепления для упомянутой втулки и аэродинамическую часть (A), и имеющая разные режимы деформации и, более конкретно, режим кручения вокруг ее размаха (E) с ее собственной частотой, которая зависит от ее жесткости при кручении вокруг упомянутого размаха (E), отличающаяся тем, что:
- она содержит средство (17) динамического скручивания, приблизительно вокруг ее размаха (E), которое выполнено с возможностью активации его в режиме реального времени, то есть во время его вращения вокруг упомянутой втулки, по меньшей мере, с частотой (Ω) вращения упомянутого винта и синхронно с азимутом вращения упомянутой лопасти, так, что такое средство (17) динамического скручивания выполнено с возможностью создания циклического шага, даже в отсутствие циклической тарелки;
- ее жесткость при кручении, которая проявляется под воздействием центробежной силы, приблизительно вокруг его размаха (Е), достаточно мала, что обеспечивает возможность получения для упомянутого средства (17) динамического скручивания в плоскости ортогонального сечения свободного конца упомянутой лопасти, упругого динамического угла закручивания (υ) для хорды, по меньшей мере, 14° при пикировании или при сваливании, оставаясь достаточно высокой так, что собственная частота кручения лопасти вокруг ее размаха будет равна частоте (Ω) вращения упомянутого винта для обеспечения возможности динамического скручивания лопасти через резонанс кручения и, таким образом, для сведения к минимуму энергии, требуемой для создания циклического шага;
- ее коэффициент демпфирования под действием центробежной силы является строго положительным, чтобы избежать резонансного расхождения разных режимов.
2. Лопасть по п.1, отличающаяся тем, что упомянутая часть (B) крепления имеет наблюдаемую жесткость при скручивании в 10-100 меньше, чем у аэродинамической части (A).
3. Лопасть по любому из пп.1 или 2, отличающаяся тем, что:
- ее структура изготовлена из композитного материала;
- ее покрытие является однонаправленным, и направление такого покрытия формирует угол, по существу, равный 0° в пределах размаха упомянутой лопасти для получения минимальной жесткости при скручивании лопасти вокруг ее размаха.
4. Лопасть по п.1, отличающаяся тем, что в аэродинамической части предусмотрена продольная прорезь на одной из ее нижней или верхней поверхностей крыла, и содержащая:
первый лонжерон, формирующий переднюю кромку и ее соседние нижнюю и верхнюю части и имеющий продольную секущую сторону, формирующую переднюю кромку упомянутой прорези;
второй лонжерон, отделенный от упомянутого первого лонжерона упомянутой прорезью и имеющий продольную секущую сторону, формирующую заднюю кромку упомянутой прорези;
оболочку, формирующую нижнюю и верхнюю поверхности упомянутой лопасти, продольно прорезанную упомянутой прорезью и включающую упомянутый первый и второй лонжероны, будучи соединенной с ними;
материал наполнения для упомянутой оболочки;
средство динамического скручивания содержит исполнительный элемент динамического скручивания, выполненный с возможностью создания относительного скольжения между кромками упомянутой прорези; и
упомянутая оболочка изготовлена из композитного материала из волокна со смолой так, что, по меньшей мере, большая часть волокон расположена так, что они формируют угол, который, по существу, равен 0°, с размахом упомянутой лопасти.
5. Лопасть по п.4, отличающаяся тем, что с обеих сторон упомянутой прорези (6), в непосредственной близости (14) к последней, упомянутая оболочка (11) жестко соединена с упомянутым первым и вторым лонжеронами (7, 9), и что снаружи в непосредственной близости (14) к упомянутой прорези (6) упомянутая оболочка соединена с остальной частью упомянутой лопасти через соединение, изготовленное из упругого материала с коэффициентом демпфирования больше чем 10%, который позволяет фильтровать вибрации лопасти, такого как эластомер, и распределенного непрерывно или с разрывами между упомянутой оболочкой и упомянутой остальной частью лопасти.
6. Лопасть по п.4, отличающаяся тем, что упомянутый материал (12) наполнения представляет собой жесткий или полужесткий пеноматериал.
7. Лопасть по п.4, отличающаяся тем, что она содержит полоску (13) упругого материала с коэффициентом демпфирования выше чем 10%, выполненную с возможностью фильтрации собственной частоты кручения лопасти, такого как, например, эластомер, и упомянутая полоска закрывает прорезь (6).
8. Лопасть по п.4, отличающаяся тем, что исполнительный элемент (17) динамического скручивания расположен на его свободном конце так, чтобы способствовать его установке и его техническому обслуживанию.
9. Лопасть по п.1, отличающаяся тем, что средство (17) динамического скручивания имеет такие размеры, чтобы они имели возможность достижения на кратных частотах частоты (Ω) вращения такого винта и синхронно с азимутом вращения упомянутой лопасти, амплитуды упомянутого угла (υ) упругого динамического скручивания, по меньшей мере, равной по абсолютному значению максимальной амплитуде разных режимов деформации на этих тех же самых кратных частотах частоты (Ω) вращения, с тем, чтобы обеспечить возможность выполнения мультициклического активного управления вибрациями.
10. Лопасть по п.1, отличающаяся тем, что ее часть (B) крепления на втулке (M) содержит средство (25-31) для последовательного управления ее собственной частотой кручения под действием центробежной силы вокруг ее размаха (E), выполненное с возможностью синхронизации во время ее вращения вокруг упомянутой втулки, упомянутой собственной частоты (Ω) кручения, по существу, с частотой вращения винта.
11. Лопасть по п.10, отличающаяся тем, что упомянутое средство (25-31) для последовательного управления ее собственной частотой регулирует упомянутую собственную частоту, регулируя жесткость при кручении, которая проявляется под действием центробежной силы, приблизительно вокруг ее размаха (E), ее части (B) крепления.
12. Винт (RO), в котором вращающееся крыло во вращении вокруг своей втулки (M) с частотой (Ω) вращения, заключенной между нижней частотой вращения и верхней частотой вращения, содержит, по меньшей мере, две лопасти (P) по любому из пп.1-10, азимуты вращения которых известны, упомянутый винт отличается тем, что он содержит:
средство для управления средством (17) динамического скручивания каждой из упомянутых лопастей, выполненное с возможностью, даже в отсутствие циклической тарелки, управлять в режиме реального времени, то есть с частотой, по меньшей мере, равной частоте (Ω) вращения, во время вращения упомянутых лопастей и синхронно с их азимутом вращения циклическим шагом для каждой из упомянутых лопастей;
средство (25-31) для последовательного управления собственной частотой кручения под действием центробежной силы каждой из упомянутых лопастей (P) вокруг их размаха (E), выполненное с возможностью синхронизации, во время такого вращения, каждой собственной частоты кручения, по существу, на частоте вращения (Ω) винта, с тем, чтобы обеспечить преимущество резонанса кручения вокруг их размаха, с тем, чтобы свести к минимуму мощность, требуемую для создания циклического шага через динамическое скручивание.
13. Винт по п.12, отличающийся тем, что упомянутое средство для управления средством (17) динамического скручивания также выполнено с возможностью в отсутствие циклической тарелки управлять общим шагом упомянутых лопастей во время вращения упомянутого винта.
14. Винт по п.12 или 13, отличающийся тем, что упомянутое средство (25-31) для последовательного управления собственной частотой кручения выполнено с возможностью регулировать в обоих направлениях собственную частоту кручения под действием центробежной силы вокруг ее размаха для каждой из упомянутых лопастей (P) между минимальным значением, соответствующим нижней частоте вращения винта, и максимальным значением, соответствующим верхней частоте вращения упомянутого винта, упомянутое средство (25-31) представляет собой, например, средство для придания жесткости части (B) крепления каждой упомянутой лопасти по любому из пп.2-10, обеспечивая возможность регулирования жесткости при кручении, проявляющейся под действием центробежной силы каждой упомянутой лопасти вокруг ее размаха между минимальным значением, соответствующим упомянутой жесткости каждой лопасти, которой не была придана жесткость с помощью упомянутого средства (25-31), и максимальным значением, соответствующим упомянутой жесткости аэродинамической части (A) каждой упомянутой лопасти.
15. Винт по п.12, отличающийся тем, что он содержит средство (37) спонтанного действия, выполненное с возможностью задавать к каждой из упомянутых лопастей в случае отказа упомянутого средства (25-31) управления, что упомянутая собственная частота, возникающая под действием центробежной силы кручения каждой из упомянутых лопастей равна собственной частоте кручения, возникающей под действием центробежной силы их аэродинамической части (A), для исключения какого-либо расхождения резонанса кручения для упомянутых лопастей.
16. Способ динамического скручивания, по меньшей мере, одной лопасти (P) крыла, вращающегося вокруг втулки (M) винта (RO) с частотой (Ω) вращения, в диапазоне от нижней частоты вращения и до верхней частоты вращения, упомянутая лопасть (P) имеет известный азимут вращения, имеет размах (E), содержит часть (B) крепления для упомянутой втулки (M) и аэродинамическую часть (A) и имеет разные режимы деформации, в частности, режим скручивания вокруг ее размаха (E) с собственной частотой, в зависимости от ее жесткости при кручении вокруг упомянутого размаха (E), отличающийся тем, что содержит следующие задачи:
- управляют в режиме реального времени посредством средства (17) динамического скручивания, то есть на частоте, по меньшей мере, равной частоте (Ω) вращения упомянутого винта, во время вращения каждой упомянутой лопасти и синхронно с азимутом вращения каждой упомянутой лопасти, при этом угол (υ) упругого динамического скручивания хорды в плоскости ортогонального сечения свободного конца каждой упомянутой лопасти, по меньшей мере, 14° при пикировании или сваливании, так, что средство динамического скручивания выполнено с возможностью создавать циклический шаг даже в отсутствие циклической тарелки;
- управляют, используя средство (25-31), собственной частотой кручения, возникающей под действием центробежной силы приблизительно вокруг размаха (E) каждой упомянутой лопасти (P), так, чтобы она была, по существу, равна частоте (Ω) вращения упомянутого винта (RO), и чтобы, следовательно, упомянутое упругое динамическое скручивание (υ) достигалось при минимальной мощности через резонанс кручения; и
- фильтруют собственные частоты разных режимов деформации каждой упомянутой лопасти (P) для исключения какого-либо расхождения резонанса.
17. Способ скручивания по п.16, отличающийся тем, что управление средством (17) динамического скручивания является мультициклическим, то есть выполняется на частоте, кратной частоте (Ω) вращения упомянутого винта (RO) для активного управления разными режимами деформации упомянутых лопастей в дополнение к управлению их циклическим шагом.
18. Способ скручивания по любому из пп.16 или 17, отличающийся тем, что управление средством (17) динамического скручивания управляет общим шагом упомянутых лопастей в дополнение к управлению их циклическим шагом.
19. Способ скручивания по п.16, отличающийся тем, что управление собственной частотой кручения, возникающей под действием центробежной силы, приблизительно вокруг ее размаха (E) каждой упомянутой лопасти (P), получают путем последовательного управления жесткостью при кручении, возникающей под действием центробежной силы приблизительно вокруг ее размаха (E) части (B) крепления каждой упомянутой лопасти (P), причем упомянутая часть (B) крепления, будучи более гибкой, чем соответствующая аэродинамическая часть (A), выполнена с возможностью придания ей жесткости вплоть до максимального значения, равного наблюдаемой жесткости при кручении вокруг ее размаха (E) упомянутой аэродинамической части.
20. Способ скручивания по п.16, отличающийся тем, что он содержит задачу, обеспечивающую в случае отказа упомянутого средства (25-31) управления, что собственная частота, под действием центробежной силы кручения каждой упомянутой лопасти вокруг ее размаха равна собственной частоте кручения, возникающей под действием центробежной силы ее аэродинамической части (A) вокруг ее размаха для исключения какого-либо расхождения резонанса кручения упомянутых лопастей.
| СПОСОБ ДОСТИЖЕНИЯ СВЕРХШИРОКОПОЛОСНОСТИ АНТЕНН ЛИНЕЙНОЙ ПОЛЯРИЗАЦИИ | 2011 |
|
RU2464678C1 |
| FR 2924681 B1, 01.01.2010 | |||
| DE 19859041 C1, 09.03.2000 | |||
| ГИБКАЯ УПРАВЛЯЮЩАЯ ПОВЕРХНОСТЬ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2408498C2 |
| ПЛОСКИЙ ПРИВОД СО СЛОИСТОЙ СТРУКТУРОЙ, ПЛОСКОЕ ПРИВОДНОЕ УСТРОЙСТВО И НЕСУЩАЯ ПЛОСКОСТЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2337430C2 |

