Изобретение относится к способу обработки данных позиционирования и, в частности, к обработке данных позиционирования, для того чтобы формировать картографические данные для использования в навигационных устройствах и, в частности, но не в особенности, в переносном навигационном устройстве (PND). Изобретение также предоставляет связанную с ним аппаратуру для обеспечения способа.
Предпосылки создания изобретения
Картографические данные для электронных навигационных устройств, таких как основанные на GPS персональные навигационные устройства, аналогичных GO™ от TomTom International BV, поступают от специализированных поставщиков карт, таких как Tele Atlas NV. Такие устройства также известны как переносные навигационные устройства (PND). Эти картографические данные специально предназначены для использования алгоритмами прокладки маршрута, обычно при использовании данных о местоположении от системы GPS. Например, дороги могут быть описаны линиями, то есть векторами (например, начальной точкой, конечной точкой, направлением дороги, при этом вся дорога состоит из многих сотен таких сегментов, каждый из которых однозначно задан параметрами направления начальной точки/конечной точки). В таком случае карта представляет собой набор таких векторов дороги, данных, связанных с каждым вектором (о лимите скорости; направлении движения и т.д.), кроме того, «точек интереса» (POI), кроме того, наименований дорог, кроме того, других географических признаков, аналогичных границам заповедников, очертаниям рек и т.д., которые все заданы векторами. Все картографические признаки (например, векторы дорог, «точки интереса» и т.д.) обычно задают в системе координат, которая соответствует системе координат GPS или связана с ней, что позволяет размещать положение устройства, определенное с помощью системы GPS, на соответствующей дороге, показанной на карте, и планировать оптимальный маршрут до пункта назначения.
При создании этой картографической базы данных для дорог Англии Tele Atlas исходил из информации об основных дорогах от различных источников, таких как картографическое управление. Он также имеет большую специально выделенную группу транспортных средств, движущихся по дорогам, кроме того, персонал, проверяющий другие карты и аэрофотоснимки, чтобы обновлять и контролировать свои данные. Эти данные образуют основу картографической базы данных Tele Atlas. Эта картографическая база данных непрерывно пополняется данными с привязкой к географическим координатам. Кроме того, она проверяется и публикуется четыре раза в год для производителей устройств, таких как TomTom.
Каждый такой сегмент дороги имеет связанный с ним параметр скорости для этого сегмента дороги, который дает указание скорости, с которой транспортное средство может двигаться по этому сегменту, и имеется средняя скорость, предлагаемая компанией, которая формирует картографические данные, которой может быть, например, Tele Atlas. Параметр скорости используется для алгоритмов планирования маршрута в переносных навигационных устройствах, в которых карта обрабатывается. Поэтому точность такого планирования маршрута зависит от точности параметра скорости. Например, пользователю на его/ее переносном навигационном устройстве часто предлагаются варианты для формирования самого быстрого маршрута между текущим местоположением устройства и пунктом назначения. Кроме того, если параметры скорости являются неточными, маршрут, вычисляемый в переносном навигационном устройстве, может не быть самым быстрым маршрутом.
Известно, что параметры, такие как плотность движения, могут существенно влиять на профиль скорости сегмента дороги, а изменения такого профиля скорости означают, что самый быстрый маршрут между двумя точками может не оставаться таким же. Кроме того, неточности параметра скорости на сегменте дороги могут приводить к неточности расчетного времени прибытия (ETA), а также к выбору менее оптимального самого быстрого маршрута.
Tele Atlas разработал систему, в которой данные GPS загружаются из переносных навигационных устройств и используются для предоставления параметров скорости для сегментов картографических данных, что способствует предоставлению параметров скорости, которые показывают истинную скорость на сегменте дороги в течение заранее определенного времени суток.
Краткое изложение сущности изобретения
Согласно первому аспекту изобретения предложен сервер, выполненный с возможностью обработки данных GPS для формирования картографических данных, содержащих множество доступных для навигации сегментов, представляющих сегменты доступного для навигации маршрута в области, покрываемой картой, при этом сервер соединен с приемопередатчиком беспроводной связи, выполненным с возможностью приема контрольных точек GPS посредством беспроводной связи от множества навигационных устройств и отправки принимаемых контрольных точек GPS на сервер, причем сервер содержит процессор, выполненный с возможностью формирования, по меньшей мере, одного профиля скорости для каждого сегмента из контрольных точек GPS, по меньшей мере, от двух из множества навигационных устройств, причем каждый профиль скорости содержит ожидаемую скорость движения на протяжении сегмента, а сервер выполнен с возможностью последовательного инструктирования приемопередатчику отправлять профили скорости на навигационные устройства.
Сервер может быть эффективным, поскольку он позволяет беспроводным способом обновлять профили скорости, связанные с каждым доступным для навигации сегментом в области, покрываемой картографическими данными, в частности, картографические данные в навигационных устройствах могут обновляться в реальном времени, то есть в то время, когда навигационное устройство обеспечивается инструкциями для определенного маршрута. Обновления в реальном времени картографических данных могут предоставлять навигационному устройству лучшее указание о транспортном потоке на этом сегменте дороги, чем старые картографические данные, что может существенно повышать точность алгоритмов маршрутизации для определения маршрута во всей области, представленной картографическими данными.
Профиль скорости может быть средней скоростью движения навигационных устройств, включающих в себя множество навигационных устройств, на протяжении сегмента. Профиль скорости может быть средней скоростью, с которой навигационные устройства движутся на протяжении сегмента в заранее определенный период времени, например в течение последнего часа. Таким образом, профиль скорости может предоставлять указание режима текущего движения.
Согласно второму аспекту изобретения предложен способ обработки данных GPS для формирования картографических данных, содержащих множество доступных для навигации сегментов, представляющих сегменты доступного для навигации маршрута в области, покрываемой картой, при этом способ содержит передачу контрольных точек GPS от множества навигационных устройств посредством беспроводной связи на процессор, инструктирование процессору формировать, по меньшей мере, один профиль скорости для каждого сегмента из контрольных точек GPS, по меньшей мере, от двух из множества навигационных устройств, при этом каждый профиль скорости содержит ожидаемую скорость движения на протяжении сегмента, и отправку профилей скорости на навигационные устройства посредством беспроводной связи.
Согласно третьему аспекту изобретения предложено навигационное устройство для определения маршрута во всей области, при этом навигационное устройство содержит приемопередатчик беспроводной связи, память, имеющую хранящиеся в ней картографические данные, содержащие множество доступных для навигации сегментов, представляющих сегменты доступного для навигации маршрута в области, покрываемой картографическими данными, по меньшей мере, один из доступных для навигации сегментов имеет связанный с ним профиль скорости, а процессор выполнен с возможностью вычисления доступного для навигации маршрута с использованием картографических данных и в ответ на, по меньшей мере, один обновленный профиль скорости, принимаемый через приемопередатчик, и если навигационное устройство обеспечивается инструкциями по маршруту для вычисленного доступного для навигации маршрута, повторного вычисления доступного для навигации маршрута с использованием, по меньшей мере, одного обновленного профиля скорости.
Навигационное устройство может быть эффективным, поскольку определенный доступный для навигации маршрут повторно вычисляется для учета любых изменений профилей скорости для сегментов картографических данных, на которых маршрут основан. Этим может повышаться точность алгоритмов маршрутизации для определения маршрута во всей области, представленной картографическими данными.
Навигационное устройство может содержать устройство позиционирования для определения контрольных точек положения для навигационного устройства, процессор, выполненный с возможностью отправки контрольных точек положения на сервер по сети связи через приемопередатчик, так что сервер может идентифицировать маршруты, которые прошло навигационное устройство. Устройство позиционирования может быть устройством GPS, которое формирует контрольные точки GPS. Таким образом, навигационное устройство может в движении предоставлять данные о положении серверу. Это может позволить серверу вычислять профили скорости, которые отражают режим текущего движения.
Процессор может быть выполнен с возможностью идентификации сегментов в пределах заранее определенного расстояния от текущего положения навигационного устройства и изменения профиля скорости для идентифицированных сегментов до всех обновленных профилей скорости или одного из них. Заранее определенное расстояние может быть представлено сегментами в пределах конкретной области вокруг навигационного устройства, например по существу прямоугольной или круговой области вокруг навигационного устройства. Расстояние между навигационным устройством и краем области может быть порядка десятков или сотен километров, предпочтительно, от 50 до 200 км. За пределами заранее определенного расстояния от текущего положения навигационного устройства процессор может не изменять профили скорости сегментов до обновленного профиля скорости. Благодаря процессору, изменяющему профили скорости только для сегментов в пределах заранее определенного расстояния от навигационного устройства, объем обработки, которая требуется, сокращается по сравнению с изменением всех профилей скорости. Изменение профилей скорости только для сегментов в пределах заранее определенного расстояния от навигационного устройства не может повлиять на точность определенного маршрута, поскольку маловероятно, что транспортное средство/человек, вместе с которым движется навигационное устройство, будет двигаться на сегменты за пределами заранее определенного расстояния в момент времени, который соответствует обновленному профилю скорости.
Например, обновленный профиль скорости может быть предоставлен для учета неожиданного падения средних скоростей на протяжении сегментов вследствие аварии, и навигационное устройство нуждается в изменении профиля скорости только для затронутых аварией сегментов, если навигационное устройство будет двигаться на этих сегментах, когда на них оказывает влияние авария. Вероятно, что если навигационное устройство находится в транспортном средстве, таком как автомобиль, то результаты аварии на сегментах, отстоящих на сотни километров от текущего положения транспортного средства, прояснятся до того, как транспортное средство достигнет этих сегментов. В соответствии с этим, если маршрут, определенный навигационным устройством, предназначен для моторного транспортного средства, заранее определенное расстояние может быть порядка сотен километров, например от 100 до 200 км. Если маршрут, определенный навигационным устройством, предназначен для транспортного средства без двигателя, такого как велосипед, то заранее определенное расстояние может быть порядка десятков километров.
Процессор может быть выполнен с возможностью определения заранее определенного расстояния от текущей скорости, с которой навигационное устройство движется. Например, заранее определенное расстояние может быть текущей скоростью навигационного устройства, умноженной на назначенное время, например один или несколько часов. Назначенное время может быть типичным временем для режима движения с возвратом к нормальному после необычного события, такого как дорожное происшествие. В качестве альтернативы, назначенное время может быть расчетным временем, в течение которого применяется обновленный профиль, отправляемый на навигационное устройство, например, сервером.
В другом варианте осуществления, заранее определенное расстояние основано на ширине полосы при передаче сигналов между навигационным устройством и сервером, который предоставляет обновленный профиль скорости. Таким путем может автоматически определяться баланс между точностью профилей скорости из картографических данных и количеством данных, отправляемых на навигационное устройство. Поэтому в одном варианте осуществления, навигационное устройство может принимать обновленные профили скорости только для сегментов в пределах заранее определенного расстояния от текущего положения навигационного устройства.
Согласно четвертому аспекту изобретения предложено навигационное устройство для определения маршрута, при этом навигационное устройство содержит приемопередатчик беспроводной связи, память, имеющую хранящиеся в ней картографические данные, приемник GPS и процессор, выполненный с возможностью отправки контрольных точек GPS, получаемых приемником GPS, на сервер через приемопередатчик беспроводной связи и вычисления доступного для навигации маршрута с использованием картографических данных, по запросу от пользователя.
Таким образом, навигационное устройство может в реальном времени или, по меньшей мере, в псевдореальном времени обеспечивать сервер контрольными точками GPS, так что сервер может вычислять профили скорости для картографических данных, а устройство может вычислять доступные для навигации маршруты.
Согласно пятому аспекту изобретения предложен носитель данных, содержащий в себе инструкции, которые при чтении процессором сервера, причем сервер содержит приемопередатчик беспроводной связи и процессор, инструктируют процессору функционировать в соответствии с первым аспектом изобретения.
Согласно шестому аспекту изобретения предложен носитель данных, содержащий в себе инструкции, которые при чтении процессором навигационного устройства инструктируют навигационному устройству функционировать в соответствии с третьим или четвертым аспектами изобретения.
Доступные для навигации сегменты обычно представляют собой сегменты дороги, но также могут представлять собой сегменты любого другого пути, канала или чего-либо подобного, доступного для навигации транспортного средства, человека и т.п. Например, доступный для навигации сегмент может представлять собой сегмент пути, реки, канала, велосипедной дорожки, пути буксировки, железнодорожной линии или чего-либо подобного.
Коснемся здесь данных о скорости, связанных с сегментом дороги. Специалисту в данной области техники должно быть понятно, что каждый сегмент дороги представляется данными в рамках картографических данных, представляющих карту. В некоторых вариантах осуществления такие данные, представляющие сегмент дороги, включают в себя идентификатор, который предоставляет справочник данных о скорости. Например, справочник может предоставлять указание относительно формируемого профиля скорости. Этот справочник может быть образован в виде справочной таблицы.
В любом из изложенных выше объектов изобретения машиночитаемая среда может содержать любую из следующих: гибкий диск, компакт-диск, доступный только для чтения (CD-ROM), универсальный цифровой диск, доступный только для чтения/универсальный цифровой диск с возможностью перезаписи (DVD-ROM/DVD-RAM), в том числе -R/-RW и +R/+RW, жесткий диск, память (включая ключ памяти на USB, карту памяти SD, карту памяти Memorystick™, компактную флэш-карту и т.п.), ленту, любой другой вид магнитооптического накопителя, передаваемый сигнал (включая пересылку по Интернету, передачу по FTP и т.д.), проводную или любую другую подходящую среду.
Краткое описание чертежей
Теперь для примера, по меньшей мере, один вариант осуществление изобретения будет описан со ссылкой на сопровождающие чертежи, на которых:
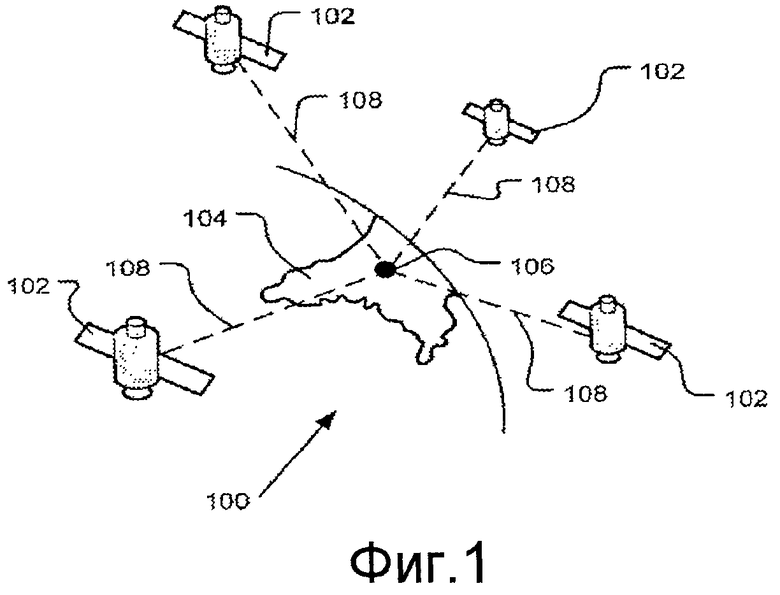
фиг.1 является схематической иллюстрацией примерной части Системы Глобального Позиционирования (GPS), используемой навигационным устройством;
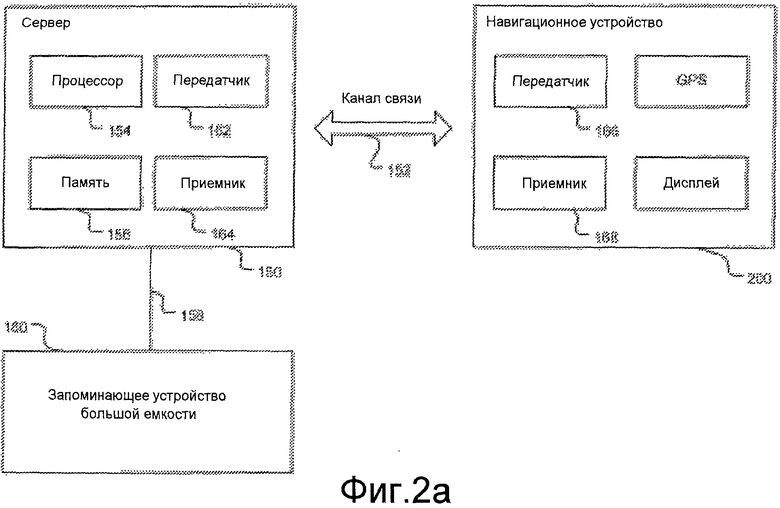
фиг.2а является структурной схемой системы связи для связи между навигационным устройством и сервером;
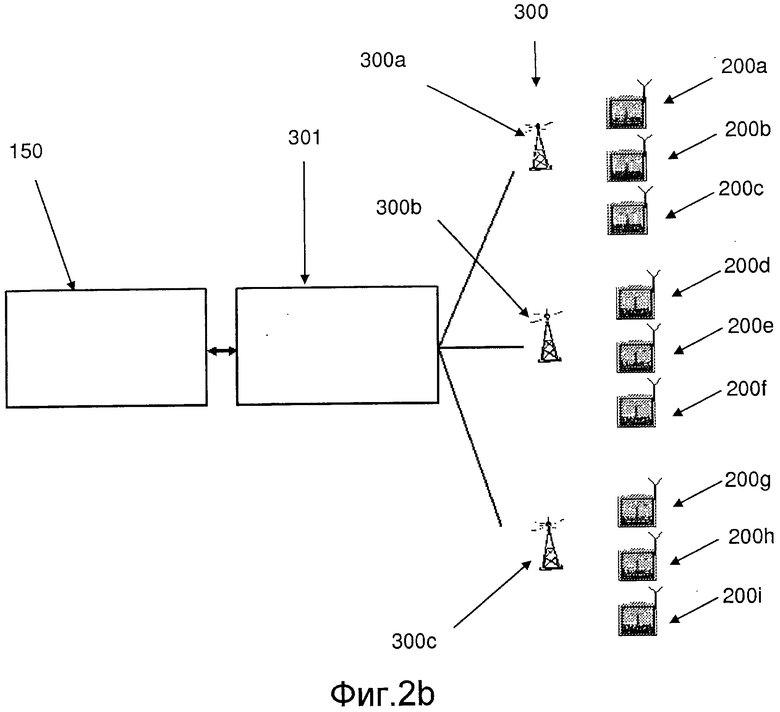
фиг.2b является структурной схемой системы связи для связи между множеством навигационных устройств и сервером;
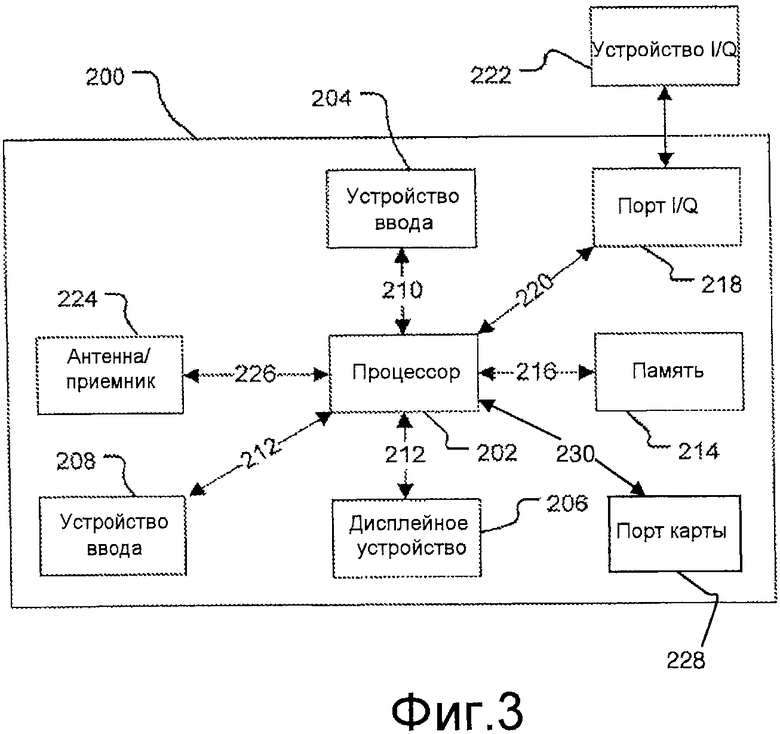
фиг.3 является схематической иллюстрацией электронных компонентов навигационного устройства из фиг.2а или любого другого подходящего навигационного устройства;
фиг.4 является структурной схемой конструкции держателя и/или установочного модуля навигационного устройство;
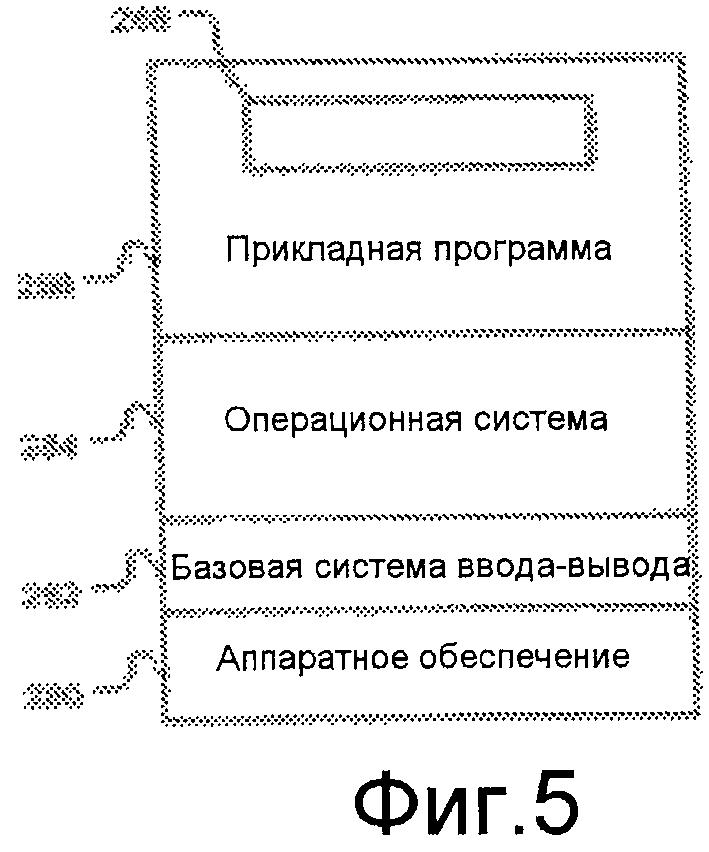
фиг.5 является схематическим представлением архитектурного комплекта, используемого навигационным устройством из фиг.3;
фиг.6 показывает блок-схему последовательности операций способа, описывающую вариант осуществления для привязки к карте контрольных точек GPS в пределах траектории.
Подробное описание варианта осуществления изобретения
На всем протяжении нижеследующего описания одинаковые ссылочные позиции будут использоваться для обозначения аналогичных элементов.
Теперь варианты осуществления настоящего изобретения будут описаны с конкретной ссылкой на переносное навигационное устройство (PND). Однако следует иметь в виду, что идеи настоящего изобретения не ограничены переносными навигационными устройствами, а широко применимы к любому типу устройства обработки, которое сконфигурировано для выполнения навигационной программы переносным образом с тем, чтобы обеспечивать планирование маршрута и выполнение навигационных функций. Поэтому отсюда следует, что в контексте настоящей заявки навигационное устройство предполагается охватывающим (без ограничения) любой тип устройства планирования маршрута и навигации независимо от того, реализовано ли это устройство в виде переносного навигационного устройства, на транспортном средстве, таком как автомобиль, или даже на базе переносных вычислительных ресурсов, например переносного персонального компьютера (PC), мобильного телефона или персонального цифрового ассистента (PDA), выполняющих программу планирования маршрута и навигации.
Кроме того, варианты осуществления настоящего изобретения описываются с ссылкой к сегментам дороги. Следует понимать, что изобретение можно также применять к другим навигационным сегментам, таким как сегменты дороги, реки, канала, велосипедной дорожки, пути буксировки, железнодорожной линии или чего-либо подобного. Для удобства их обычно называют сегментом дороги.
Из нижеследующего должно быть очевидно, что идеи настоящего изобретения являются полезными даже в тех случаях, когда пользователь не обращается к инструкциям по навигации из одной точки в другую, а только хочет быть обеспеченным планом данного местоположения. В подобных случаях нет необходимости, чтобы вместе с местоположением «пункта назначения», выбранным пользователем, имелось соответствующее начальное местоположение, из которого пользователь хочет начать осуществлять навигацию, и вследствие этого в этой заявке ссылка на местоположение «пункта назначения» или даже плана «пункта назначения» не должны интерпретироваться как подразумевающие, что формирование маршрута является обязательным, что движение в «пункт назначения» должно происходить или даже что при наличии пункта назначения необходимо обозначение соответствующего начального местоположения.
С учетом упомянутых выше оговорок систему глобального позиционирования (GPS) из фиг.1 и аналогичные используют для решения различных задач. В общем, GPS является основанной на спутниковом радио навигационной системой, позволяющей неограниченному числу пользователей непрерывно определять положение, скорость, время и в некоторых случаях информацию о направлении. Прежде известная как NAVSTAR, GPS включает в себя множество спутников, которые вращаются вокруг Земли по очень точным орбитам. На основании этих точных орбит спутники GPS могут ретранслировать свое местоположение в виде GPS-данных к любому количеству приемных блоков. Однако понятно, что можно использовать такие системы глобального позиционирования, как GLOSNASS, европейская система позиционирования «Галилео», система позиционирования COMPASS или IRNSS (индийская региональная навигационная спутниковая система).
Система GPS реализуется, когда устройство, специально оборудованное для приема GPS-данных, начинает сканировать радиочастоты спутниковых сигналов GPS. При приеме радиосигнала со спутника GPS, устройство определяет точное местоположение этого спутника через один из множества различных обычных способов. В большинстве случаев устройство будет продолжать сканирование до тех пор, пока не будут зарегистрированы сигналы, по меньшей мере, трех различных спутников (отметим, что в нестандартной ситуации положение можно определять только по двум сигналам, используя иные триангуляционные способы). При реализации геометрической триангуляции, приемник использует три известных местоположения для определения его собственного двухмерного положения относительно спутников. Это может быть сделано известным способом. В дополнение к этому регистрация сигнала четвертого спутника позволяет приемному устройству вычислять его трехмерное положение путем тех же самых геометрических вычислений известным способом. Данные о положении и скорости могут обновляться в реальном времени на непрерывной основе неограниченным числом пользователей.
Как показано на фиг.1, система 100 GPS содержит множество спутников 102, движущихся по орбитам вокруг Земли 104. Приемник 106 GPS принимает GPS-данные в виде широкополосных информационных сигналов 108 спутников GPS от некоторого количества из множества спутников 102. Широкополосные информационные сигналы 108 непрерывно передаются с каждого спутника 102, при этом каждый из передаваемых широкополосных информационных сигналов 108 содержит поток данных, включающий в себя информацию, идентифицирующую конкретный спутник 102, от которого исходит поток данных. Для GPS-приемника 106 обычно требуются широкополосные информационные сигналы 108 с, по меньшей мере, трех спутников 102, чтобы можно было вычислять двухмерное положение. Прием четвертого широкополосного информационного сигнала позволяет GPS-приемнику 106 вычислять с использованием известного способа трехмерное положение.
Обратимся к фиг.2а, где показано навигационное устройство 200 (то есть переносное навигационное устройство PND), содержащее устройство позиционирования, в этом варианте осуществления приемное устройство 106 GPS, и беспроводной приемопередатчик, содержащий передатчик 165 и приемник 168, способные устанавливать информационный сеанс связи с сетевой аппаратурой телекоммуникационной сети, такой как сотовая сеть. Беспроводная связь может быть инфракрасной связью, радиочастотной связью, такой как связь на сверхвысоких частотах, спутниковой связью и т.д.
Согласно этому, через телекоммуникационную сеть устройство 200 может устанавливать канал 152 связи (который также может охватывать другие сети в дополнение к телекоммуникационной сети, например, такую как Интернет) с сервером 150. Соответственно, беспроводное сетевое соединение может быть установлено между навигационным устройством 200 (которое может быть и часто бывает мобильным, поскольку оно движется отдельно и/или в транспортном средстве) и сервером 150 для обеспечения оперативного или, по меньшей мере, современного шлюза для информации.
Для навигационного устройства 200 можно использовать “технологию мобильной связи” внутри навигационного устройства 200, такие как встроенный модем GPRS, и он может включать в себя внутренние компоненты и/или вставляемую карту (например, модуль идентификации абонента (SIM-карту)) в комплекте с необходимыми технологиями мобильной связи и/или антенной.
Установление сетевого соединения между навигационным устройством 200 и сервером 150, например, с использованием Интернета можно осуществлять известным способом. В этой связи можно использовать любое количество подходящих протоколов обмена данными, например многоуровневый TCP/IP. Кроме того, навигационное устройство может использовать любое количество стандартов связи, таких как CDMA2000, GSM, IEEE 802.11 a/b/c/g/n и т.д.
Канал 152 связи не ограничен конкретной технологией телекоммуникационной связи. Кроме того, канал 152 связи не ограничен единственной технологией беспроводной связи; то есть канал 152 может включать в себя несколько линий связи, которые используют различные технологии. Например, канал 152 связи может быть выполнен с возможностью обеспечения тракта при электрической, оптической и/или электромагнитной связи и т.д., а также при беспроводной связи. Кроме того, канал 152 связи может включать в себя промежуточные устройства, например, такие как маршрутизаторы, повторители, буферы, передатчики и приемники.
В одной иллюстративной компоновке канал 152 связи включает в себя телефонные и компьютерные сети.
Сигналы связи, передаваемые по каналу 152 связи, включают в себя, но без ограничения ими, сигналы, которые могут быть необходимыми или желательными для определенной технологии связи. Например, сигналы могут быть пригодными для использования в технологии сотовой связи, такой как множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с кодовым разделением каналов (CDMA), глобальная система мобильной связи (GSM), система пакетной радиосвязи общего пользования (GPRS) и т.д. По каналу 152 связи могут передаваться как цифровые, так и аналоговые сигналы. В соответствии с требованиями технологии связи эти сигналы могут быть модулированными, шифрованными и/или сжатыми сигналами.
Сервер 150 включает в себя в дополнение к другим компонентам, которые могут быть не проиллюстрированы, процессор 154, в рабочем состоянии соединенный с памятью 156 и в рабочем состоянии также связанный с запоминающим устройством 160 большой емкости через проводное или беспроводное соединение 158. Запоминающее устройство 160 большой емкости содержит в себе хранилище навигационных данных и картографической информации, и, в свою очередь, оно может быть отдельным от сервера 150 устройством или может быть включено в состав сервера 150. Кроме того, в рабочем состоянии процессор 154 соединен с передатчиком 162 и приемником 164 для передачи и приема информации по каналу 152 связи на навигационное устройство 200 и с него. Отправляемые и принимаемые сигналы могут включать в себя информационные, связные и/или другие распространяемые сигналы. Передатчик 162 и приемник 164 можно выбирать или проектировать согласно требованию к связи и технологии связи, используемой в проектировании связи для навигационной системы 200. Кроме того, следует отметить, что функции передатчика 162 и приемника 164 могут быть объединены в одном приемопередатчике.
Как упоминалось выше, навигационное устройство 200 может быть выполнено с возможностью связи с сервером 150 по каналу 152 связи при использовании передатчика 166 и приемника 168 для отсылки и приема сигналов и/или данных по каналу 152 связи, при этом следует отметить, что эти устройства также можно использовать для связи с другими устройствами, а не с сервером 150. Кроме того, передатчик 166 и приемник 168 выбирают или проектируют согласно требованиям к связи и технологии связи, используемой в проектировании связи для навигационного устройства 200, и при этом, как описано выше относительно фиг.2а, функции передатчика 166 и приемника 168 могут быть объединены в одном приемопередатчике. Конечно, навигационное устройство 200 содержит другие аппаратные средства и/или функциональные части, которые в этой заявке будут описаны более подробно ниже.
Программным обеспечением, хранящимся в памяти 156 сервера, предоставляются инструкции процессору 154, и это позволяет серверу 150 предоставлять услуги навигационному устройству 200. Одна услуга, предоставляемая сервером 150, включает в себя обработку запросов из навигационного устройства 200 и передачу навигационных данных из запоминающего устройства 160 большой емкости в навигационное устройство 200. Другая услуга, которая может быть предоставлена сервером 150, включает в себя обработку навигационных данных с использованием различных алгоритмов для требуемого применения и отсылку результатов этих вычислений в навигационное устройство 200.
Сервер 150 образует удаленный источник данных, доступный для навигационного устройства 200 по беспроводному каналу. Сервер 150 может включать в себя сетевой сервер, располагаемый в локальной сети (LAN), глобальной сети (WAN), виртуальной частной сети (VPN) и т.д.
Навигационное устройство 200 может снабжаться информацией с сервера 150 при загрузках информации, которая может обновляться автоматически, время от времени, или при соединении пользователем навигационного устройства 200 с сервером 150, и/или более динамически при более систематическом или часто повторяемом соединении, осуществляемом между сервером 150 и навигационным устройством 200 через беспроводное соединение. При многих динамических вычислениях процессор 154 в сервере 150 может использоваться для удовлетворения значительной части потребностей в обработке, однако процессор навигационного устройства 200 (не показанный на фиг.2а) также может осуществлять значительную часть обработки и вычислений, часто независимо от соединения с сервером 150.
Обратимся к фиг.2b, где в этом варианте осуществления сервер 150 выполнен с возможностью связи со множеством навигационных устройств с 200а по 200i по сети 300 сотовой связи и через Интернет 301. Каждое навигационное устройство с 200а по 200i соответствует навигационному устройству 200, описанному при обращении к фиг.2а, и имеет GPS-приемник для получения контрольных точек положения GPS. В этом варианте осуществления, навигационные устройства с 200а по 200i связаны с базовыми станциями с 300а по 300с телекоммуникационной сети 300, и эти базовые станции с 300а по 300с последовательно пропускают сигналы, принимаемые с навигационных серверов с 200а по 200i, на сервер 150 через Интернет 301. В то же время сервер 150 может отправлять сигналы на каждое из навигационных устройств с 200а по 200i через Интернет 301 и соответствующую базовую станцию с 300а по 300с.
Относительно фиг.3 следует отметить, что структурная схема навигационного устройства 200 не включает в себя всех компонентов навигационного устройства, а только характерные из многочисленных примерных компонентов. Навигационное устройство 200 размещено в корпусе (непоказанном). Навигационное устройство 200 включает в себя схемы обработки, содержащие, например, процессор 202, упомянутый выше, при этом процессор 202 соединен с устройством 204 ввода и дисплейным устройством, например дисплейным экраном 206. Хотя здесь сделана ссылка на единственное устройство 204 ввода, специалисту в данной области техники должно быть понятно, что устройство 204 ввода представляет любое количество устройств ввода, включая клавиатуру, устройство речевого ввода, сенсорную панель и/или любое другое известное устройство ввода, используемое для ввода информации. Точно так же дисплейный экран 206 может включать в себя любой тип дисплейного экрана, например, такой как жидкокристаллический дисплей (LCD).
Согласно одному аспекту в одной компоновке устройство 204 ввода, сенсорная панель и дисплейный экран 206 объединены с получением интегрального устройства ввода и отображения, включающего в себя сенсорный планшет или сенсорный экран 250 ввода (фиг.4), что позволяет осуществлять ввод информации (путем непосредственного ввода, выбора меню и т.д.) и отображать информацию на сенсорном панельном экране, вследствие чего пользователю необходимо только касаться участка дисплейного экрана 206 для выбора одного из множества отображаемых пунктов меню или для активации одной из множества виртуальных или программно-управляемых кнопок. В этой связи процессор 202 поддерживает графический пользовательский интерфейс (GUI), который работает в сочетании с сенсорным экраном.
В навигационном устройстве 200 процессор 202 в рабочем состоянии соединен через соединение 210 с устройством 204 ввода и может принимать с него входную информацию и в рабочем состоянии соединен через выходные соединения 212, по меньшей мере, с одним из дисплейного экрана 206 и с устройством 208 вывода для вывода информации с него. Навигационное устройство 200 может включать в себя устройство 208 вывода, например звуковое устройство вывода (например, громкоговоритель). Поскольку устройство 208 вывода может воспроизводить пользователю звуковую информацию из навигационного устройства 200, то должно быть понятно, что в равной мере устройство 204 ввода также может включать в себя микрофон и программное обеспечение для приема входных голосовых команд. Кроме того, навигационное устройство 200 может также включать в себя любое дополнительное устройство 204 ввода и/или любое дополнительное устройство вывода, например, такое как звуковые устройства ввода/вывода.
Процессор 202 в рабочем состоянии соединен с памятью 214 через соединения 216 и также выполнен с возможностью приема/отправки информации с портов 218 ввода-вывода (I/O) и на них через соединение 220, при этом порт 218 I/O может быть соединен с устройством 222 I/O, внешним по отношению к навигационному устройству 200. Внешнее устройство 222 I/O может включать в себя, но без ограничения им, внешнее устройство прослушивания, например, такое как головной телефон. Кроме того, соединение к устройству 222 I/O может быть проводным или беспроводным соединением к любому другому внешнему устройству, такому как автомобильная стереоустановка, например, для работы при свободных руках и/или для работы с голосовым управлением, соединением к головному телефону или наушникам и/или, например, соединением к мобильному телефону, при этом соединение к мобильному телефону может быть использовано для установления соединения к данным между навигационным устройством 200 и, например, Интернетом или любой другой сетью и/или для установления соединения с сервером через, например, Интернет или некоторую другую сеть.
Память 214 навигационного устройства 200 содержит участок энергонезависимой памяти (например, для хранения программного кода) и участок энергозависимой памяти (например, для хранения данных, когда выполняется программный код). Навигационное устройство также содержит порт 228, который связан с процессором 202 через соединение 230, что позволяет добавлять к устройству 200 съемную карту памяти (обычно называемую картой). В описываемом варианте осуществления порт выполнен с возможностью присоединения SD (Secure Digital) карты. В других вариантах осуществления имеется возможность присоединять к порту память других форматов (такую как компактные флэш-карты), Memory Stick™, xD-карты памяти, флэш-диски для универсальной последовательной шины (USB), мультимедийные карты (ММС), интеллектуальные медийные карты, микродиски и т.п.).
Фиг.3 дополнительно иллюстрирует рабочее соединение между процессором 202 и антенной/приемником 224 через соединение 226, при этом антенна/приемник 224 может быть, например, антенной/приемником GPS и может функционировать по существу как GPS-приемник 106 из фиг.1. Следует понимать, что антенна и приемник, обозначенные ссылочной позицией 224, объединены схематически для иллюстрации, но антенна и приемник могут быть раздельно расположенными компонентами и что антенна может быть, например, патч-антенной GPS или спиральной антенной.
Конечно, специалисту в данной области техники должно быть понятно, что электронные компоненты, показанные на фиг.3, снабжаются энергией обычным образом от одного или более источников питания (непоказанных). Такие источники питания могут включать в себя внутреннюю батарею и/или вход для питания постоянным током низкого напряжения или любое другое подходящее устройство. Как должно быть понятно специалисту в данной области техники, предполагаются различные конфигурации компонентов, показанных на фиг.3. Например, компоненты, показанные на фиг.3, могут быть в связи друг с другом через проводные и/или беспроводные соединения и т.п. Поэтому навигационное устройство 200, описываемое в этом изобретении, может быть переносным или ручным навигационным устройством 200.
В дополнение к этому переносное или ручное навигационное устройство 200 из фиг.3 может быть известным образом соединено или «состыковано» с транспортным средством, например, таким как велосипед, мопед, автомобиль или лодка. В таком случае это навигационное устройство 200 можно снимать с места крепления для использования при навигации в качестве переносного или ручного. Действительно, согласно другим вариантам осуществления устройство 200 может быть выполнено ручным, позволяющим пользователю осуществлять навигацию.
Что касается фиг.4, то навигационное устройство 200 может быть блоком, который включает в себя объединенное устройство 206 ввода и отображения и другие компоненты из фиг.2а (включая, но без ограничения ими, внутренний GPS-приемник 224, процессор 202, источник питания (непоказанный), системы 214 памяти и т.д.).
Навигационное устройство 200 можно помещать на кронштейн 252, который можно прикреплять к приборной панели/окну транспортного средства, используя чашечный присос 254. Этот кронштейн 252 является одним примером установочной станции, на которую можно устанавливать навигационное устройство 200. Навигационное устройство 200 можно устанавливать на кронштейн 252 установочной станции или же, например, присоединять с защелкиванием навигационное устройство 200 к кронштейну 252. Кроме того, навигационное устройство 200 может быть расположено на кронштейне 252 с возможностью поворота. Для расцепления соединения между навигационным устройством 200 и установочной станцией можно, например, нажать кнопку (непоказанную) на навигационном устройстве 200. Другие в равной степени подходящие конструкции для присоединения навигационного устройства 200 к установочной станции и отсоединения от него хорошо известны специалистам в данной области техники.
Обратимся к фиг.5, где процессор 202 и память 214 взаимодействуют для поддержания BIOS (базовой системы ввода-вывода) 282, которая функционирует как интерфейс между функциональными аппаратными компонентами 280 навигационного устройства 200 и программой, выполняемой устройством. В этом случае процессор 202 загружает из памяти 214 операционную систему 284, которая обеспечивает среду, в которой прикладная программа 286 (реализующая некоторые или все описанные функциональные возможности планирования маршрута и навигации) может выполняться. Прикладная программа 286 обеспечивает операционную среду, включая графический пользовательский интерфейс (GUI), который поддерживает основные функции навигационного устройства, например просмотр карты, планирование маршрута, навигационные функции и любые другие функции, связанные с ними. В этой связи часть прикладной программы 286 содержит модуль 288 организации просмотра.
Навигационное устройство 200 выполнено так, что пользователь может загружать картографические данные в память 214 или на карту памяти в порте 228 карты. Картографические данные содержат множество доступных для навигации сегментов, представляющих сегменты доступного для навигации маршрута в области, покрываемой картографическими данными, при этом каждый из доступных для навигации сегментов имеет связанный с ним профиль скорости. Каждый профиль скорости может содержать множество средних скоростей на протяжении сегмента для различных, еженедельно повторяющихся периодов времени. Процессор 202 навигационного устройства 200 выполнен с возможностью определения доступного для навигации маршрута, запрошенного пользователем, с использованием картографических данных, и этот доступный для навигации маршрут может быть основан на профилях скорости. Например, процессор 202 может использовать профили скорости для определения самого быстрого маршрута и/или оценивания времени движения по маршруту.
В описываемом варианте осуществления, процессор 202 навигационного устройства запрограммирован на прием GPS-данных, принимаемых антенной 224, и время от времени на хранение этих GPS-данных вместе с отметкой времени, когда GPS-данные приняты, в памяти 214 для создания записи о местоположении навигационного устройства. Каждая запись данных, хранящаяся таким образом, может считаться контрольной точкой GPS; то есть она является контрольной точкой местоположения навигационного устройства и содержит географическую широту, географическую долготу, отметку времени и отчет о точности.
В одном варианте осуществления, данные хранятся по существу на периодической основе, то есть, например, каждые 5 с. Специалисту в данной области техники должно быть понятно, что возможны другие интервалы времени и что имеется равновесие между разрешением данных и объемом памяти; то есть когда разрешение данных повышают, беря большее количество выборок, для хранения данных требуется дополнительная память. Однако в других вариантах осуществления разрешение может быть по существу любым: 1 с, 10 с, 15 с, 20 с, 30 с, 45 с, 1 мин, 2,5 мин (или на самом деле любой интервал времени между этими интервалами). Таким образом, в память устройства заносится запись о местонахождении устройства 200 в отдельные моменты времени.
В некоторых вариантах осуществления может обнаруживаться, что качество захваченных данных снижается по мере увеличения интервала и наряду с этим степень ухудшения, по меньшей мере, частично зависит от скорости, с которой навигационное устройство 200 перемещается, тогда интервал примерно 15 с можно полагать подходящим верхним пределом.
Хотя навигационное устройство 200 обычно выполнено с возможностью формирования записи о местонахождении, в некоторых вариантах осуществления, данные не записываются в течение заранее определенного периода времени и/или на протяжении расстояния в начале или конце пути. Такое мероприятие способствует защите неприкосновенности частной жизни пользователя навигационного устройства 200, поскольку можно скрывать местоположение его/ее дома и других часто посещаемых пунктов назначения. Например, навигационное устройство 200 может быть выполнено так, что данные не будут храниться в течение примерно первых 5 мин пути и/или в продолжение примерно первой мили пути.
В других вариантах осуществления, GPS-данные могут не храниться на периодической основе, а могут храниться в памяти при наступлении заранее определенного события. Например, процессор 202 можно запрограммировать на хранение GPS-данных при пересечении устройством перекрестков, изменении сегмента дороги или при наступлении другого такого события.
Кроме того, процессор 202 выполнен с возможностью загрузки время от времени записи о местонахождении устройства 200 (то есть GPS-данных и отметки времени) в сервер 150 по каналу 152 связи, включающему в себя беспроводную сотовую сеть 300. Процессор 202 выполнен с возможностью загрузки записи о местонахождении в по существу реальном времени, хотя, разумеется, это может означать, что фактически данные передаются время от времени при относительно непродолжительном периоде времени между передачами, например каждые 5, 10, 20, 30, 40, 50 секунд, минуту и т.д., или через любой интервал времени между этими интервалами, и по этой причине время можно более правильно считать псевдореальным временем. В вариантах осуществления с таким псевдореальным временем навигационное устройство может быть выполнено с возможностью буферизации контрольных точек GPS в памяти 214 и/или на карте, введенной в порт 228, и передачи их при хранении заранее определенного количества. Это заранее определенное количество может быть порядка 20, 36, 100, 200 или любым количеством между указанными. Специалисту в данной области техники должно быть понятно, что заранее определенное количество отчасти определяется объемом памяти 214/карты в порту 228.
В описываемом варианте осуществления, запись о местонахождении содержит одну или более траекторий, при этом каждая траектория представляет перемещение навигационного устройства 200 в пределах периода времени, составляющего 24 ч. Каждый 24-й час совпадает с датой календаря, но в других вариантах осуществления это не является обязательным обстоятельством.
Обычно пользователь навигационного устройства 200 дает его/ее согласие на загрузку в сервер 150 записи о местонахождении устройства. Если согласие не дается, то запись в сервер 150 не загружается. Само навигационное устройство и/или компьютер, к которому навигационное устройство подключают, может быть выполнено с возможностью запроса у пользователя его/ее согласия на такое использование записи о местонахождении.
Сервер 150 выполнен с возможностью приема записи о местонахождении устройства и хранения ее в запоминающем устройстве 160 большой емкости для обработки. Поэтому с течением времени в запоминающем устройстве 160 большой емкости накапливается множество записей о местонахождении навигационных устройств с 200а по 200i, которые имеют обновленные данные. Как будет описано далее, сервер 150 выполнен с возможностью формирования профилей скорости на основании этих записей.
Как описано выше, запоминающее устройство 160 большой емкости также содержит в себе картографические данные. Такими картографическими данными обеспечивается информация о местоположении сегментов дороги, «точек интереса» и другая такая информация, которая обычно встречается на карте.
Согласно первому процессу, сервер 150 выполнен с возможностью выполнения функции привязки к карте между картографическими данными и контрольными точками GPS, содержащимися в записях о местонахождении, которые были приняты, и такой процесс описан на фиг.6. Такую привязку к карте можно выполнять в так называемом реальном времени, то есть по мере приема записей о местонахождении, или можно выполнять спустя некоторое время, выбирая записи о местонахождении из запоминающего устройства 160 большой емкости.
Чтобы повысить точность привязки к карте, предварительную обработку записей о местонахождении выполняют следующим образом. Каждую траекторию GPS (то есть GPS-данные за период времени 24 ч) разделяют 600 на один или более отрезков пути, при этом каждый отрезок пути представляет одно перемещение навигационного устройства 200, и эти отрезки пути последовательно хранят для обработки позднее.
В пределах каждого отрезка пути отклоняют 602 контрольные точки GPS, точности которых согласно отчету, принятому от навигационного устройства, не являются достаточно высокими. Поэтому в некоторых вариантах осуществления контрольная точка может быть отклонена, если отчет о точности указывает, что для этой контрольной точки GPS навигационным устройством 200 принимались сигналы менее чем от трех спутников 102. Кроме того, каждый отрезок пути отбрасывается 604, когда отчетное время между контрольными точками становится выше порогового значения. Каждый отрезок пути, который прошел через этот этап предварительной обработки, является привязанным к карте.
В этой связи отброшенный отрезок пути является заранее определенным отрезком пути, для которого интервал времени между последовательными контрольными точками GPS больше, чем заранее определенный интервал времени. Соответственно, можно сделать заключение о том, что транспортное средство остается неподвижным, и в силу этого следует считать первый отрезок пути законченным, а второй отрезок пути начавшимся. Поэтому отброшенный отрезок пути становится двумя отдельными отрезками пути.
Однако до разделения отрезка пути осуществляют контроль относительно того, не изменилось ли положение транспортного средства между последними двумя контрольными точками, поскольку промежуток, превышающий заранее определенное время между контрольными точками GPS, может также быть следствием потери GPS-сигнала, и при таких обстоятельствах отрезок пути не разделяют. В описываемом варианте осуществления, заранее определенное время составляет примерно 3 мин. Однако специалисту в данной области техники должно быть понятно, что промежуток может быть любым другим подходящим интервалом времени, таким как примерно любым из следующих: 15 с, 30 с, 1 мин, 90 с, 2 мин, 5 мин, 10 мин или любым другим интервалом времени между указанными. Как описано ниже, если средняя скорость навигационного устройства 200, из которого отсылаются контрольные точки GPS, ниже заранее определенного порога, то в некоторых вариантах осуществления данные могут быть отклонены при последующей обработке. Такой вариант осуществления может быть полезным в том отношении, что могут удаляться данные, относящиеся к так называемому стартстопному движению, которое случается после происшествий, таких как авария или что-либо подобное, при которых могут удаляться оставшиеся данные, более представительные относительно бесперебойного движения транспорта.
Затем последовательно каждый отрезок пути и контрольные точки в пределах этого отрезка пути привязывают к карте в рамках картографических данных. Каждая карта содержит множество сегментов дороги, по которым можно двигаться, при этом каждый сегмент представлен на карте как прямолинейный вектор.
При выполнении программного кода на процессоре 154 сервера 150 создается средство привязки к карте, которое осуществляет обработку контрольных точек с пропуском или каждой контрольной точки на отрезке пути до нахождения контрольной точки, которая лежит в пределах сегмента или находится достаточно близко к сегменту, чтобы можно было принять, что она находится на этом сегменте (то есть она находится в пределах порога расстояния от сегмента). Этот порог позволяет при менее чем 100%-ной точности GPS и эффекте сжатия разделять дорогу на набор прямолинейных векторов.
Каждый отрезок пути имеет исходную контрольную точку (то есть первую контрольную точку в пределах отрезка пути), которая является более строго связанной с сегментом, чем другие контрольные точки в пределах отрезка пути, поскольку отсутствуют сегменты, которые уже идентифицированы и которые можно использовать для ограничения выбора сегментов. Если для этой первой контрольной точки многочисленные сегменты находятся 606 в пределах порога, то в соответствии с алгоритмом просматривается следующая контрольная точка GPS (то есть вторая контрольная точка) в пределах отрезка пути и формируется набор маршрутов по этим многочисленным сегментам на основе возможного движения, как функция расстояния между двумя контрольными точками (то есть между первой и второй контрольными точками). Если вторая контрольная точка не приводит к единственному подходящему сегменту для первой контрольной точки, то в соответствии с алгоритмом осуществляется переход к третьей контрольной точке в пределах отрезка пути и снова формируются и сравниваются возможные маршруты для подбора и предоставления единственного кандидата для первой контрольной точки 608. Этот процесс может продолжаться до тех пор, пока в пределах отрезка пути не будут обработаны оставшиеся контрольные точки GPS.
Преимущество такого варианта осуществления заключается в том, что несмотря на то что любая одна первая контрольная точка в отрыве от других может быть вблизи многочисленных сегментов, а эти сегменты невозможно различить в отрыве от других, становится возможным использовать дополнительное перемещение (то есть вторую и третью контрольные точки) для определения идентичности сегмента, с которым связана первая контрольная точка. Таким образом, первый сегмент для отрезка пути определяется средством привязки к карте.
После того как первый сегмент идентифицирован для отрезка пути, дополнительные контрольные точки обрабатывают, чтобы идентифицировать дополнительные сегменты. Конечно, возможно, что следующая контрольная точка отрезка пути будет находиться 612 на том же самом сегменте, что и первая контрольная точка.
Поэтому обрабатывают 610 последующие контрольные точки отрезка пути, чтобы определить, находятся ли они в пределах порога расстояния от сегмента, а средство привязки к карте связывает этот сегмент с каждой из контрольных точек, которые находятся в пределах порога расстояния. Когда средство привязки к карте обрабатывает контрольную точку, которая находится за пределами порога расстояния, оно создает новый набор подходящих сегментов для этой контрольной точки. Однако теперь можно ввести дополнительное ограничение, заключающееся в том, что следующий сегмент является сегментом, который соединен с концом сегмента, который только что обработан. Средство привязки к карте получает эти соседние сегменты на основании базовых картографических данных.
Если в любой точке средство привязки к карте не в состоянии идентифицировать сегмент для данной контрольной точки, который следует за предшествующим сегментом, или в силу того, что нет сегментов в пределах порога, или если оно не может однозначно идентифицировать единственный сегмент, то средство привязки к карте осуществляет этап с помощью последующих контрольных точек 616, чтобы дополнительно ограничить путь до тех пор, пока оно не сможет идентифицировать сегмент, который является однозначно привязанным. То есть если контрольная точка n не может быть однозначно связана с сегментом, то сегмент (n+1) используется для дополнительного ограничения идентификации сегмента. Если контрольная точка (n+1) не дает единственного сегмента, используется контрольная точка (n+2). В некоторых вариантах осуществления этот процесс может выполняться до тех пор, пока не будет идентифицирован единственный сегмент или все из контрольных точек GPS не будут обработаны совместно с отрезком пути.
Средство привязки к карте выполнено с возможностью подбора и однозначной идентификации сегментов; в описываемых вариантах осуществления оно не пытается создавать непрерывный маршрут, а только подбирает и привязывает сегменты к контрольным точкам. В других вариантах осуществления, может быть желательно осуществлять подбор и иметь средство привязки к карте, создающее непрерывные маршруты.
Следовательно, в конце процесса, который выполняет средство привязки к карте, получают набор сегментов дороги, по которой двигалось навигационное устройство 200 при выполнении анализа отрезков пути. В дальнейшем средство привязки к карте дополнительно обрабатывает эти сегменты дороги и находит по контрольным точкам GPS время въезда и также время проезда по этому сегменту. Эти установленные времена хранятся в запоминающем устройстве 160 большой емкости для последующей обработки. Можно также хранить множество контрольных точек GPS для каждого сегмента дороги. Однако независимо от того, сколько контрольных точек GPS будет связано с каждым сегментом, время въезда, контрольные точки GPS и протяженность сегмента (которую в этом варианте осуществления хранят в картографических данных) используют, чтобы вычислять среднюю скорость для этого сегмента дороги. Затем эту среднюю скорость, связанную с соответствующими установленными временами и этим сегментом, хранят в запоминающем устройстве 160 большой емкости. Информация, относящаяся к скорости транспортного потока на сегменте дороге и установленная для сегмента дороги, может считаться данными о скорости для этого сегмента дороги.
Кроме того, сервер 150 выполнен с возможностью выполнения программного кода для осуществления усреднения на процессоре 154, чтобы получать усреднитель, который обрабатывает установленные времена для образования на их основании, как описано ниже, одного или более средних. Теперь будет описан процесс усреднения, используемый в этом варианте осуществления.
На первом этапе процесса усреднитель группирует средние скорости для каждого сегмента дороги на карте на основе интервала времени, на котором имеется эта средняя скорость, таком как последние 5 мин, 10 мин, 15 мин, 30 мин или любой интервал времени между этими значениями времени.
До включения в группу средней скорости, получаемой для отрезка пути на заранее определенном интервале времени, она просматривается для подбора и повышения качества данных. В этом варианте осуществления, средняя скорость добавляется к группе для заранее определенного периода времени только в случае, если средняя скорость попадает в заранее определенные пределы. В этом варианте осуществления, согласно способу исключаются скорости, которые превышают максимальный заранее определенный порог (который может составлять примерно 180 км/ч), и кроме того, согласно способу исключаются скорости, которые падают ниже заранее определенной величины средней скорости для этого сегмента в этот заранее определенный период времени (которая может быть, например, 2 км/ч). В других вариантах осуществления, максимальная разрешенная скорость может быть задана как лимит скорости для этого сегмента дороги, но специалисту в данной области техники должно быть понятно, что такая информация может быть неточной в обрабатываемых картографических данных и что лимит скорости для сегмента дороги на самом деле может не давать точного указания условий дорожного движения.
В заранее определенный момент времени после прохождения назначенного периода времени, например сразу же после прохождения назначенного периода времени, вычисляют среднюю скорость для каждого сегмента дороги, для назначенного периода времени. Имеются несколько вариантов вычисления средней скорости: использование простого арифметического среднего или гармонического среднего или вычисление медианы.
Поэтому в описываемом варианте осуществления и для обрабатываемой карты формируют на карте для каждого сегмента дороги средние скорости для назначенного периода времени, который недавно прошел. Должно быть понятно, что на самом деле не для всех сегментов дороги необходимо иметь среднюю скорость, установленную для них, для каждого назначенного периода времени, поскольку некоторые дороги могут пересекаться нечасто, особенно в моменты времени, когда люди отсутствуют, например рано утром.
Однако до использования средних скоростей на каждом сегменте выполняют контроль качества. В некоторых вариантах осуществления, среднее отбрасывают, если имеются меньше чем 5 значений, которые подходят для образования этого среднего. Конечно, в других вариантах осуществления, можно использовать другое количество значений, такое как 2, 3, 4, 6, 7, 8, 10, 20 или большее количество, или любое количество между указанными.
Кроме того, выполняют дополнительный контроль качества среднего и для каждого среднего стандартное отклонение среднего делят на квадратный корень из количества выборок данных, которые подходят для образования среднего для этого сегмента в течение этого периода времени. Если результат этого вычисления находится за пределами заранее определенного порога, то это среднее опять отбрасывают, оставляя пропуск для этого периода времени.
Дополнительный контроль качества может быть реализован для отбрасывания средних в любом случае из следующих: отклонение в данных находится за пределами заранее определенного порога; существует большее количество значений, чем заранее определенное количество, резко отклоняющихся за пределы заранее определенного порога. Специалисту в данной области техники должны быть понятны такие статистические методы гарантии качества данных.
Набор средних для любого данного сегмента дороги может считаться измеренным профилем скорости для этого сегмента дороги.
Специалисту в данной области техники должно быть понятно, что если измеренный профиль скорости для сегмента дороги имеет немного пропущенных значений скорости (то есть для всех или, по меньшей мере, для большинства заранее определенных периодов времени имеется значение), то этот сегмент можно обрабатывать и при этом пропущенные значения будут скрыты.
Каждое среднее, которое прошло этот контроль качества, считается заслуживающим доверия и разрешенным для использования в картографических данных. В таком случае сервер 150 посылает эти обновленные профили скорости на навигационные устройства с 200а по 200i по каналу 152 связи.
До отправки обновленных профилей скорости на навигационные устройства с 200а по 200i процессор сервера 150 может осуществить контроль для выяснения, сколько отличающихся обновленных профилей скорости из текущих профилей скорости картографических данных использованы навигационными устройствами 200. Если разность выше заранее определенного порога, то обновленный профиль скорости отсылается в навигационные устройства, однако если это не так, то обновленный профиль скорости не отсылается в навигационные устройства. Это может способствовать сокращению необходимой обработки и использованию имеющейся полосы частот.
В другом варианте осуществления, профили скорости не являются средними скоростями на протяжении сегмента во время последнего назначенного периода, но при этом добавляют задержки к текущим профилям скорости, получая, например, среднюю скорость текущего профиля скорости за вычетом прогнозируемой разности скоростей, такой как 5, 10, 15, 20 км/ч и т.д. Прогнозируемую разность скоростей можно вычислять, используя обычные алгоритмы, известные специалисту в данной области техники.
При приеме обновленных профилей скоростей, навигационное устройство 200 изменяет, по меньшей мере, некоторые из профилей скоростей картографических данных, хранящихся в памяти 214 или на карте памяти в порту 228 карты, до обновленных профилей скорости. Таким образом, профили скорости картографических данных обновляются в псевдореальном времени, так что картографические данные, хранящиеся в навигационном устройстве, дают более точное отражение текущих условий дорожного движения.
Если навигационному устройству предоставляют инструкции по маршруту для вычисленного доступного для навигации маршрута, процессор 202 может повторно вычислить доступный для навигации маршрут с использованием обновленных профилей скорости. Таким образом, навигационное устройство 200 может предоставлять маршруты, которые автоматически адаптируются к изменениям средней скорости движения на протяжении сегментов доступного для навигации маршрута.
В одном варианте осуществления, процессор 202 навигационного устройства 200 совсем не использует обновленные профили скорости, принимаемые от сервера 150, а только изменяет профили скоростей для сегментов в пределах заранее определенного расстояния от текущего положения навигационного устройства 200. Например, процессор 202 при приеме обновленных профилей скорости может идентифицировать сегменты в пределах заранее определенного расстояния от текущего положения навигационного устройства и изменения профиля скорости для каждого из идентифицированных сегментов до обновленного профиля скорости, если обновленный профиль скорости принимается для этого сегмента. Профили скорости сегментов, которые попадают за пределы заранее определенного расстояния, остаются неизменными. Заранее определенное расстояние может представляться сегментами в пределах конкретной области вокруг навигационного устройства, и в случае навигационного устройства, используемого для направления транспортного средства, заранее определенное расстояние может быть от 50 до 200 км.
В случае навигационных устройств, которые пригодны для образования доступных для навигации маршрутов, предназначенных для различных форм перемещения, таких как ходьба, езда на велосипеде и т.д., в дополнение к моторным средствам передвижения, процессор 202 навигационного устройства 200 может определять заранее определенное расстояние на основании текущей скорости, с которой движется навигационное устройство. Например, заранее определенное расстояние может быть текущей скоростью навигационного устройства, умноженной на назначенное время, например на один или более часов.
В другом варианте осуществления, заранее определенное расстояние основано на ширине полосы при передаче сигналов между навигационным устройством и сервером, который предоставляет обновленный профиль скорости.
В этом варианте осуществления, обновленные профили скорости временно удерживаются в навигационном устройстве 200 в течение заранее определенного промежутка времени, такого как 1 ч, после чего профиль скорости в навигационном устройстве 200 изменяется обратно на исходный профиль скорости или дальнейший обновленный профиль скорости. Обновленный профиль скорости, определенный из последнего назначенного периода времени, может обеспечить лучшее представление текущих условий дорожного движения в течение краткого периода времени после назначенного периода времени, но возможно, что в случае когда новые обновленные профили скорости не принимаются, исходный профиль скорости, который основан на средней скорости, вычисленной по нескольким периодам времени, а не по одному периоду времени, будет давать лучшее представление условий дорожного движения в намного более поздние моменты времени, например по прошествии 1, 2 или 3 ч после назначенного периода времени.
Специалисту в данной области техники должно быть понятно, что аппаратура, предназначенная для выполнения способа, описанного в этом изобретении, может содержать аппаратное обеспечение, программное обеспечение, микропрограммные средства или любое сочетание двух или более из них.
Специалисту в данной области техники должно быть понятно, что хотя термин «GPS-данные» использован для обозначения данных о положении, получаемых из системы глобального позиционирования GPS, описанной, например, в соответствии с фиг.1, другие данные о положении могут быть обработаны способом, аналогичным способам, описанным в этом изобретении. Поэтому термин «GPS-данные» может быть заменен фразой «данные позиционирования». Такую информацию о положении можно получать, например, из информации о положении, получаемой при работе мобильного телефона, из данных, принимаемых на платных шлагбаумах, данных, получаемых от петли индуктивности на дороге, данных, получаемых из системы распознавания номерных знаков, или любых других подходящих данных.
Изобретение относится к устройствам обработки данных позиционирования. Технический результат заключается в повышении точности определения скорости на сегменте дороги в течение заранее определенного времени суток. Сервер выполнен с возможностью обработки данных GPS, чтобы формировать улучшенные картографические данные, эти данные содержат множество доступных для навигации сегментов, представляющих сегменты доступного для навигации маршрута в области, покрываемой картой, сервер соединен с приемопередатчиком беспроводной связи, выполненным с возможностью приема контрольных точек GPS посредством беспроводной связи от множества навигационных устройств и отправки принимаемых контрольных точек GPS на сервер, при этом сервер содержит процессор, выполненный с возможностью формирования, по меньшей мере, одного профиля скорости для каждого сегмента из контрольных точек GPS, по меньшей мере, от двух из множества навигационных устройств, причем каждый профиль скорости содержит ожидаемую скорость движения на протяжении сегмента, а сервер выполнен с возможностью последовательного инструктирования приемопередатчику отправлять профили скорости на навигационные устройства. 3 н. и 2 з.п. ф-лы, 6 ил.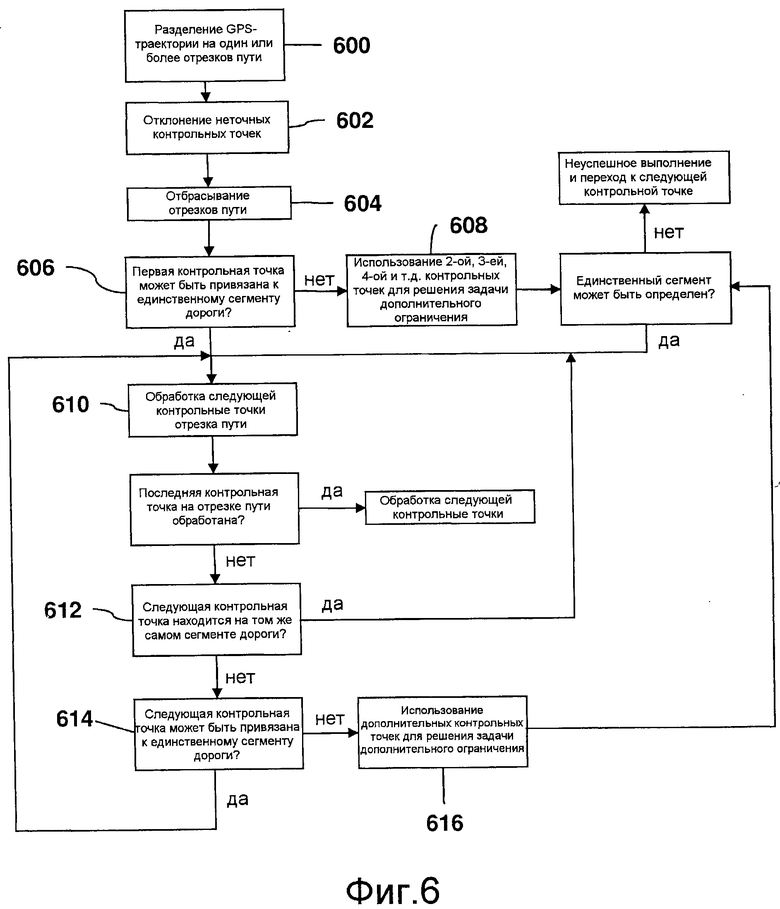
1. Сервер, содержащий память, имеющую картографические данные, хранимые в ней, упомянутые картографические данные содержат множество доступных для навигации сегментов, которые могут быть выбраны для определения доступного для навигации маршрута в области, покрываемой картографическими данными, при этом по меньшей мере некоторые из доступных для навигации сегментов имеют связанные с ними данные о скорости, представляющие измеренный профиль скорости, упомянутый измеренный профиль скорости содержит множество средних скоростей множества навигационных устройств на сегменте для различных повторяющихся периодов времени, сервер, соединенный с приемопередатчиком беспроводной связи, выполненным с возможностью приема данных о положении посредством беспроводной связи от множества навигационных устройств и отправки принимаемых данных о положении на сервер, при этом данные о положении для навигационного устройства представляют положение навигационного устройства на протяжении времени, причем сервер содержит процессор, выполненный с возможностью:
формирования обновленных профилей скорости, указывающих режим текущего движения для множества сегментов посредством обработки данных о положении, по меньшей мере, от двух из множества навигационных устройств, причем каждый обновленный профиль скорости содержит данные, представляющие среднюю скорость движения на сегменте за недавно прошедший период времени,
сравнения каждого обновленного профиля скорости с соответствующей средней скоростью измеренного профиля скорости для сегмента для определения, является ли разность средних скоростей выше заранее определенного порога;
идентифицирование, для каждого навигационного устройства, сегментов в пределах заранее определенного расстояния от текущего положения навигационного устройства; и
последующего инструктирования приемопередатчику отправлять обновленные профили скорости, определенные как имеющие разность средних скоростей выше заранее определенного порога для любых идентифицированных сегментов, на каждое из навигационных устройств.
2. Сервер по п.1, в котором данные, представляющие среднюю скорость движения на сегменте за недавно прошедший период времени, каждого обновленного профиля скорости содержат: (i) среднюю скорость или (ii) разность скоростей, добавляемую к соответствующей средней скорости измеренного профиля скорости для сегмента.
3. Способ функционирования сервера, содержащего процессор и память, имеющую картографические данные, хранимые в ней, упомянутые картографические данные содержат множество доступных для навигации сегментов, которые могут быть выбраны для определения доступного для навигации маршрута в области, покрываемой картографическими данными, по меньшей мере некоторые из доступных для навигации сегментов имеют связанные с ними данные о скорости, представляющие измеренный профиль скорости, упомянутый измеренный профиль скорости содержит множество средних скоростей множества навигационных устройств на сегменте для различных повторяющихся периодов времени, при этом способ содержит этапы, на которых:
получают данные о положении, принятые посредством беспроводной связи от множества навигационных устройств, данные о положении для навигационного устройства представляют положение навигационного устройства на протяжении времени;
инструктируют процессору:
формировать обновленные профили скоростей, указывающие режим текущего движения для множества сегментов посредством обработки данных о положении, по меньшей мере, от двух из множества навигационных устройств, при этом каждый обновленный профиль скорости содержит данные, представляющие среднюю скорость движения на сегменте за недавно прошедший период времени;
сравнивать каждый обновленный профиль скорости с соответствующей средней скоростью измеренного профиля скорости для сегмента для определения, является ли разность средних скоростей выше заранее определенного порога; и
идентифицировать, для каждого навигационного устройства, сегменты в пределах заранее определенного расстояния от текущего положения навигационного устройства;
отправлять обновленные профили скорости, определенные как имеющие разность средних скоростей выше заранее определенного порога для любых идентифицированных сегментов, для передачи на каждое из навигационных устройств посредством беспроводной связи.
4. Способ по п.3, в котором данные, представляющие среднюю скорость движения на сегменте за недавно прошедший период времени, каждого обновленного профиля скорости содержат: (i) среднюю скорость или (ii) разность скоростей, добавляемую к соответствующей средней скорости измеренного профиля скорости для сегмента.
5. Носитель данных, содержащий в себе инструкции, которые при чтении процессором сервера инструктируют процессору функционировать в соответствии со способом по пп.3 или 4.
| EP 1005627 B1, 29.10.2003 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 7181344 B2, 20.02.2007 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ НАВИГАЦИИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ УПРАВЛЕНИЯ МАРШРУТОМ НА СЛОЖНОМ ПЕРЕСЕЧЕНИИ ДОРОГ | 2003 |
|
RU2270480C2 |

