Область техники, к которой относится изобретение
Это изобретение относится к устройству и способу для определения информации о парковках. В частности, хотя и не исключительно, настоящее изобретение относится к устройству и способам для определения местоположения и числа парковочных мест. Варианты осуществления настоящего изобретения иллюстрируются относительно портативных навигационных устройств (так называемых PND), в частности PND, которые включают в себя функциональность приема и обработки сигнала системы глобального позиционирования (GPS).
Уровень техники
Портативные навигационные устройства (PND), которые включают в себя функциональность приема и обработки сигнала GPS (система глобального позиционирования), известны и широко используются как встроенные в автомобили или другие транспортные средства навигационные системы.
В общих чертах, современное PND содержит процессор, память (по меньшей мере, одну из энергозависимой и энергонезависимой, а обычно обе) и картографические данные, сохраненные в памяти. Процессор и память совместно работают, чтобы предоставлять среду выполнения, в которой программная операционная система может быть установлена, и дополнительно она является общим местом для одной или более дополнительных программ системы программного обеспечения, которые должны быть предоставлены, чтобы давать возможность управления функциональностью PND и предоставлять различные другие функции.
В типичном варианте, эти устройства дополнительно содержат один или более интерфейсов ввода, которые позволяют пользователю управлять устройством и взаимодействовать с ним, и один или более интерфейсов вывода, посредством которых информация может быть передана пользователю. Иллюстративные примеры интерфейсов вывода включают в себя визуальный дисплей и динамик для звукового вывода. Иллюстративные примеры интерфейсов ввода включают в себя одну или более физических кнопок, чтобы управлять операцией включения/выключения или другими признаками устройства (причем эти кнопки необязательно должны быть на самом устройстве, а могут быть на рулевом колесе, если устройство встроено в транспортное средство), и микрофон для обнаружения речи пользователя. В конкретной предпочтительной компоновке дисплей интерфейса вывода может быть сконфигурирован как чувствительный к прикосновению дисплей (посредством чувствительного к прикосновению покрытия или иным способом), чтобы дополнительно предоставлять интерфейс ввода, посредством которого пользователь может управлять устройством посредством прикосновения.
Устройства этого типа также зачастую включают в себя один или более интерфейсов физического разъема, посредством которых электроэнергия и необязательно сигналы данных могут быть переданы устройству и приняты от него, и необязательно одно или более беспроводных передающих устройств/приемных устройств, чтобы предоставлять возможность обмена данными по системам сотовой связи и другим сетям передачи данных и сигналов, например Wi-Fi, Wi-Max GSM и т.п.
PND-устройства этого типа также включают в себя GPS-антенну, посредством которой спутниковые широковещательные сигналы, включающие в себя данные о местоположении, могут приниматься и впоследствии обрабатываться, чтобы определять текущее местоположение устройства.
PND-устройство может также включать в себя электронные гироскопы и акселерометры, которые создают сигналы, которые могут обрабатываться, чтобы определять текущее угловое и линейное ускорение, и, в свою очередь, и совместно с информацией о местоположении, полученной из GPS-сигнала, скорость и относительное перемещение устройства и, таким образом, транспортного средства, в котором оно установлено. Типично такие признаки обычно предоставляются в навигационных системах в транспортном средстве, но также могут быть предоставлены в PND-устройствах, если это целесообразно.
Полезность таких PND-устройств проявляется, прежде всего, в их способности определять маршрут между первым местоположением (в типичном варианте, начальным или текущим местоположением) и вторым местоположением (в типичном варианте, пунктом назначения). Эти местоположения могут вводиться пользователем устройства посредством любого из широкого множества различных способов, например, посредством почтового индекса, названия улицы и номера дома, заранее сохраненных "хорошо известных" пунктов назначения (таких как известные места, муниципальные местоположения (такие как спортивные площадки или плавательные бассейны) или другие точки интереса), и любимых или недавно посещенных пунктов назначения.
В типичном варианте, PND способно посредством программного обеспечения вычислять "наилучший" или "оптимальный" маршрут между местоположениями начального и конечного адресов из картографических данных. "Наилучший" или "оптимальный" маршрут определяется на основе предварительно определенных критериев и необязательно должен быть самым быстрым или самым коротким маршрутом. Выбор маршрута, по которому должен направляться водитель, может быть очень сложным, и выбранный маршрут может принимать во внимание существующую, прогнозируемую и динамически и/или беспроводным образом принимаемую информацию о транспортном потоке и дорожную информацию, историческую информацию о скоростях на дороге и собственные предпочтения водителя по факторам, определяющим выбор дороги (например, водитель может указать, что маршрут не должен включать в себя автомагистрали или платные дороги).
Помимо этого, устройство может непрерывно наблюдать за дорожными условиями и режимом движения и предлагать или выбирать изменение маршрута, по которому должна быть проделана оставшаяся часть поездки, ввиду изменившихся условий. Системы наблюдения за дорожным движением в реальном времени, основанные на различных технологиях (например, обмене данными с мобильных телефонов, фиксированных камерах, GPS-отслеживании транспортного парка), используются, чтобы идентифицировать задержки движения и подавать информацию в системы уведомления.
PND этого типа могут в типичном варианте быть установлены на приборной панели или ветровом стекле транспортного средства, но могут также быть сформированы как часть бортового компьютера радиосистемы транспортного средства или фактически как часть системы управления самого транспортного средства. Навигационное устройство может также быть частью карманной системы, такой как PDA (портативный цифровой помощник), мультимедийный проигрыватель, мобильный телефон или т.п., и в этих случаях обычная функциональность карманной системы расширяется посредством установки программного обеспечения в устройство, чтобы выполнять как вычисление маршрута, так и навигацию по вычисленному маршруту.
Функциональность составления схемы маршрута и навигации также может быть предоставлена посредством настольных или мобильных вычислительных ресурсов, выполняющих соответствующее программное обеспечение. Например, Королевский автомобильный клуб (RAC) предоставляет онлайновое средство составления схемы маршрута и навигации по адресу http//www.rac.co.uk, причем это средство дает возможность пользователю вводить начальную точку и пункт назначения, после чего сервер, с которым соединен PC пользователя, вычисляет маршрут (аспекты которого могут указываться пользователем), формирует карту и формирует набор исчерпывающих инструкций по навигации для направления пользователя из выбранной начальной точки в выбранный пункт назначения. Средство также предусматривает псевдотрехмерную визуализацию вычисленного маршрута и функциональность предварительного просмотра маршрута, которая моделирует перемещение пользователя по маршруту и тем самым предоставляет пользователю предварительный просмотр вычисленного маршрута.
В контексте PND, после того как маршрут вычислен, пользователь взаимодействует с навигационным устройством, чтобы выбирать требуемый вычисленный маршрут, необязательно из списка предложенных маршрутов. По желанию, пользователь может вмешиваться или направлять процесс выбора маршрута, например, указывая, что некоторые маршруты, дороги, местоположения или критерии следует исключать или они являются обязательными для конкретной поездки. Аспект вычисления маршрута в PND формирует одну основную функцию, а навигация по такому маршруту является другой основной функцией.
Во время навигации по вычисленному маршруту стандартным для таких PND является предоставление визуальных и/или звуковых инструкций, чтобы направлять пользователя по выбранному маршруту до конца этого маршрута, т.е. до требуемого пункта назначения. Также обычным для PND является отображение картографической информации на экране во время навигации, такая информация регулярно обновляется на экране так, что отображенная картографическая информация представляет текущее местоположение устройства и, таким образом, пользователя или транспортного средства пользователя, если устройство используется для навигации в транспортном средстве.
Значок, отображенный на экране, в типичном варианте обозначает текущее местоположение устройства и помещен в центре с картографической информацией о текущей и окружающих дорогах поблизости от текущего местоположения устройства и других также отображаемых картографических признаков. Дополнительно, навигационная информация может отображаться по желанию в строке состояния выше, ниже или с одного края от отображаемой картографической информации, примеры навигационной информации включают в себя расстояние до следующего отклонения от текущей дороги, которое должен предпринять пользователь, характер этого отклонения, возможно, представленный дополнительным значком, дающим представление о конкретном типе отклонения, например поворот налево или направо. Навигационная функция также определяет содержимое, длительность и время звуковых инструкций, посредством которых пользователь может быть направлен по маршруту. Как может быть понятно, простая инструкция, такая как "поворот налево через 100 м", требует значительной обработки и анализа. Как ранее упомянуто, взаимодействие пользователя с устройством может осуществляться посредством сенсорного экрана или дополнительно или альтернативно посредством вмонтированного в рулевую колонку пульта дистанционного управления, посредством речевого управления или любым другим подходящим способом.
Дополнительной важной функцией, предоставляемой устройством, является автоматическое повторное вычисление маршрута в случае, когда: пользователь отклоняется от ранее вычисленного маршрута во время навигации (либо из-за аварии, либо намеренно); условия движения в реальном времени диктуют, что альтернативный маршрут будет более подходящим, и устройству соответствующим образом предоставляется возможность распознавать такие условия автоматически, или если пользователь активно вынуждает устройство выполнять повторное вычисление маршрута по какой-либо причине.
Также известна возможность вычислять маршрут с помощью определенных пользователем критериев; например, пользователь может предпочитать, чтобы устройством вычислялся живописный маршрут, или может желать исключать любые дороги, на которых вероятен, ожидается или в настоящий момент имеется затор в движении. Программное обеспечение устройства в таком случае должно вычислять различные маршруты и рассматривать более предпочтительно те из них, которые включают в себя при следовании по маршруту самое большое число пунктов интереса (известных как POI), отмеченных как, например, имеющие художественную красоту, или используя сохраненную информацию, служащую признаком преобладающих условий движения на конкретных дорогах, упорядочивать вычисленные маршруты на основе степени вероятного затора или задержки вследствие него. Другое вычисление маршрута на основе POI и информации о дорожном движении и навигационные критерии также возможны.
Хотя вычисление маршрута и функции навигации являются фундаментальными для общей функциональности PND, возможно использовать устройство исключительно для отображения информации или "свободного вождения", при котором отображается только картографическая информация, соответствующая текущему местоположению устройства, и при котором маршрут не вычисляется, и навигация не выполняется в текущий момент посредством устройства. Такой режим работы зачастую применим, когда пользователь уже знает маршрут, по которому ему необходимо проехать, и не требует помощи по навигации.
Устройства типа, описанного выше, например модель 720T, произведенная и предоставленная компанией TomTom International B.V., предоставляют надежное средство для обеспечения возможности пользователям перемещаться из одного местоположения в другое.
Зачастую пользователи таких навигационных устройств хотят припарковать свои транспортные средства. В то время как картографические данные, используемые для определения маршрута, могут идентифицировать местоположение коммерческих площадок для парковки, т.е. автомобильные стоянки, зачастую многие площадки для парковок коммерчески не обслуживаются и не идентифицированы в картографических данных. Например, уличные площадки для парковки, которые могут не быть идентифицированы в картографических данных, тем не менее могут все еще быть часто доступными для парковки транспортных средств. Кроме того, трудно определить вероятность того, что место доступно на площадке для парковки, даже когда эта площадка для парковки идентифицирована в картографических данных.
Целью настоящего изобретения является решение этой проблемы, в частности попытка предоставить устройство и способ идентификации площадок для парковки. Некоторые варианты осуществления настоящего изобретения также имеют целью определение вероятности того, что парковочное место является доступным на площадке для парковки.
Сущность изобретения
Преследуя эту цель, предпочтительный в настоящее время вариант осуществления настоящего изобретения предоставляет способ определения информации о парковках, содержащий этапы: приема, на сервере, информации о поездках от множества навигационных устройств, информация о поездках указывает одну или более поездок, осуществленных каждым навигационным устройством; и определения, посредством сервера из информации о поездках, информации о парковках, указывающей географическое местоположение одной или более площадок для парковки.
Другой вариант осуществления настоящего изобретения относится к компьютеру для определения информации о парковках, содержащему: устройство обмена данными для приема информации о поездках от навигационных устройств, информация о поездках указывает одну или более поездок, осуществленных каждым навигационным устройством; модуль профиля доступности парковки (PAP), исполняющийся на сервере, при этом PAP-модуль выполнен с возможностью определять, из информации о поездках, информацию о парковках, указывающую географическое местоположение одной или более площадок для парковки.
Еще один вариант осуществления настоящего изобретения относится к компьютерному программному обеспечению, содержащему один или более программных модулей, функционирующих так, когда выполняются в среде выполнения, чтобы вынуждать процессор определять информацию о парковках, способ содержит этапы: приема, на сервере, информации о поездках от множества навигационных устройств, информация о поездках указывает одну или более поездок, осуществленных каждым навигационным устройством; и определения, посредством сервера из информации о поездках, информации о парковках, указывающей географическое местоположение одной или более площадок для парковки.
Преимущества этих вариантов осуществления излагаются далее, а дополнительные подробности и признаки каждого из этих вариантов осуществления задаются в прилагаемых зависимых пунктах формулы изобретения и в других местах нижеследующего подробного описания.
Краткое описание чертежей
Различные аспекты идей настоящего изобретения и компоновок, осуществляющих эти идеи, далее описываются в качестве иллюстративного примера со ссылкой на прилагаемые чертежи, на которых:
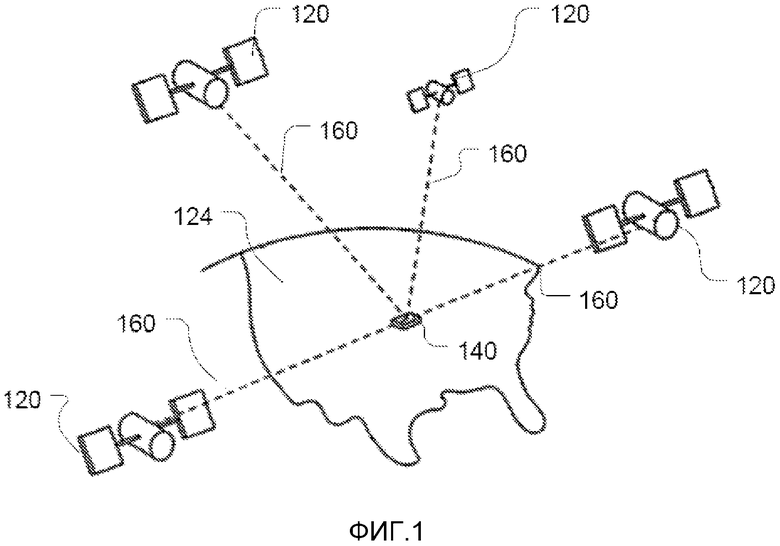
фиг.1 - это схематическая иллюстрация системы глобального позиционирования (GPS);
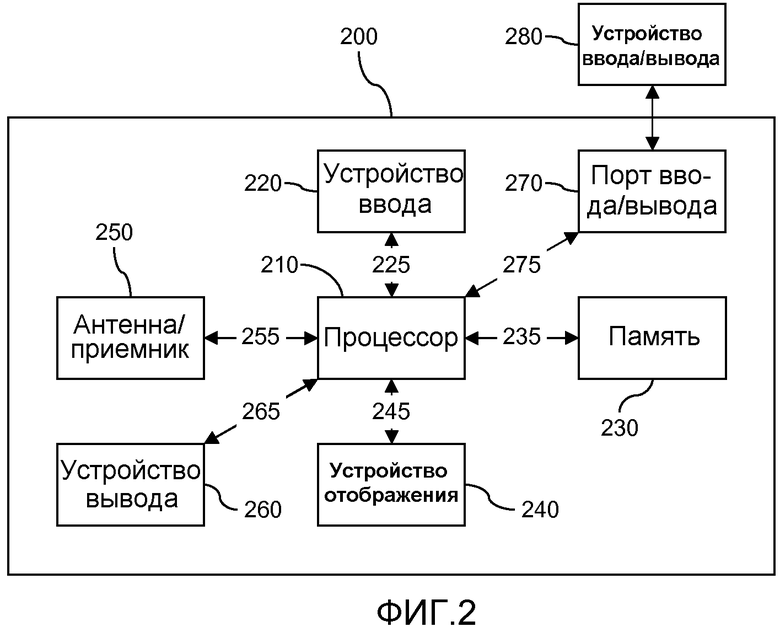
фиг.2 - это схематическая иллюстрация электронных компонентов, выполненных с возможностью реализовывать навигационное устройство;
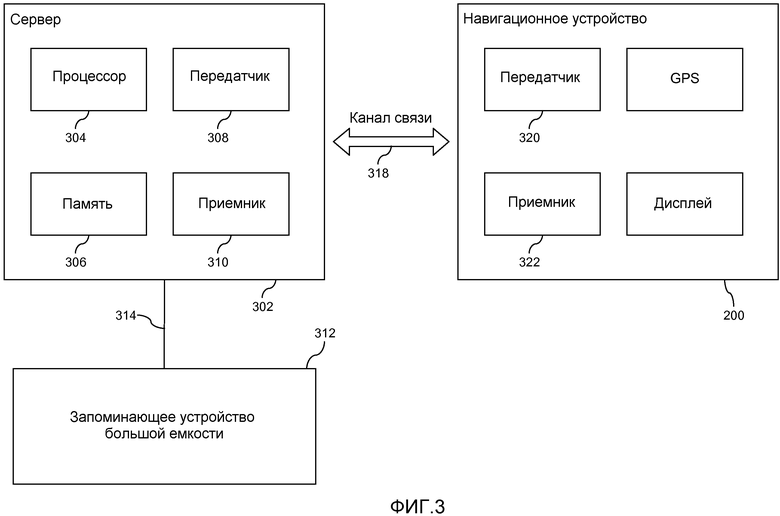
фиг.3 - это схематическая иллюстрация метода, которым навигационное устройство может принимать информацию по каналу беспроводной связи.
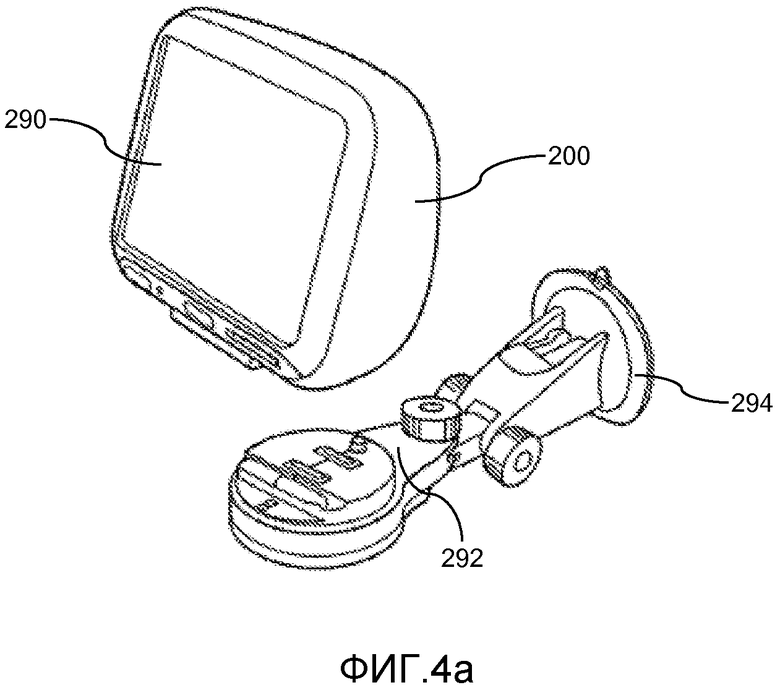
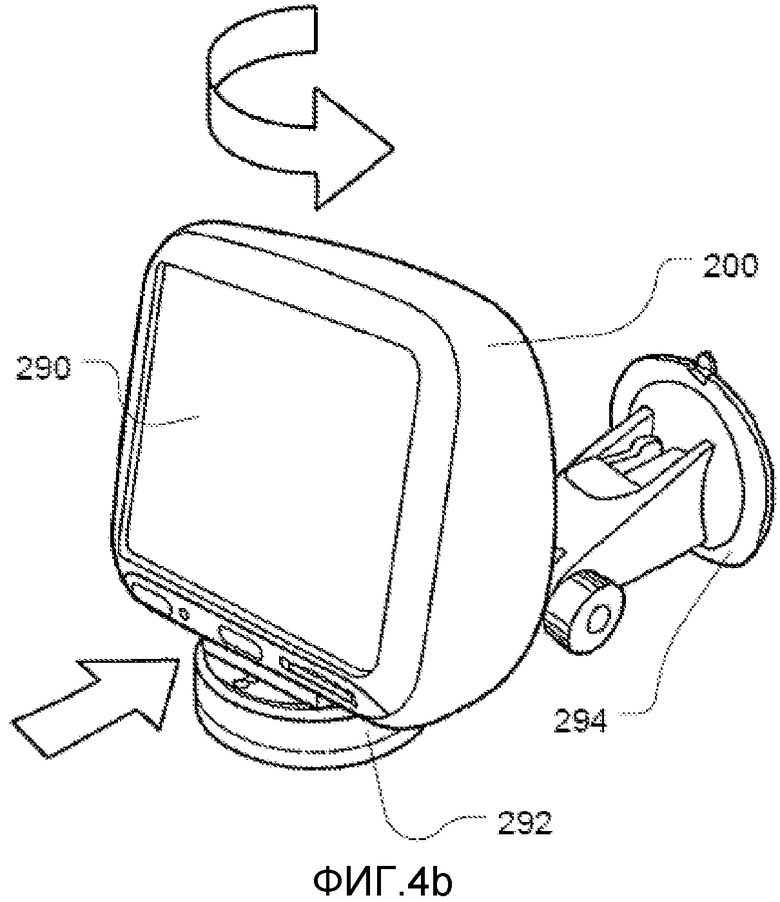
фиг.4a и 4b являются иллюстративными видами в перспективе навигационного устройства;
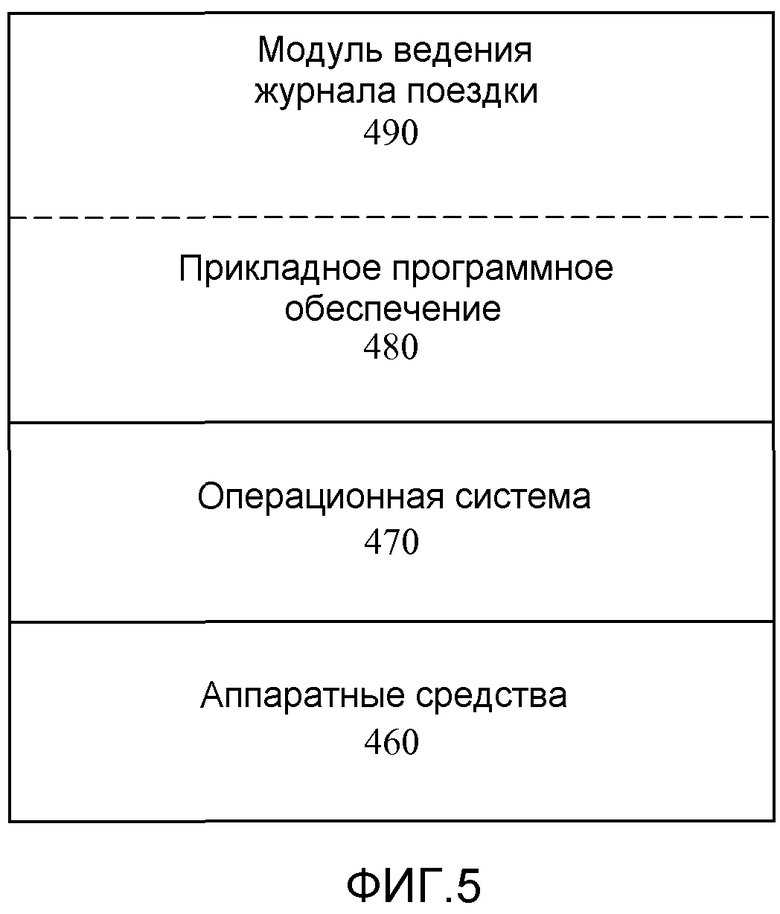
фиг.5 - это схематическое представление программного обеспечения, используемого навигационным устройством;
фиг.6 - это схематическое представление программного обеспечения, используемого сервером;
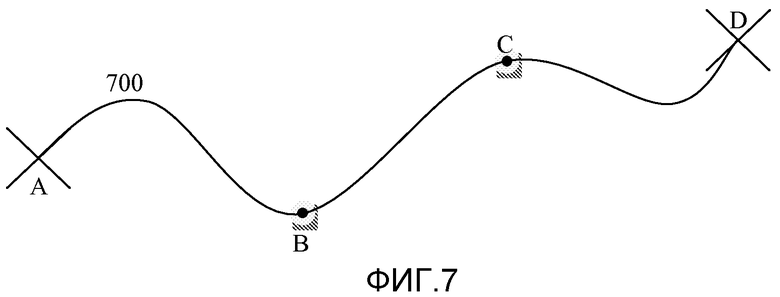
фиг.7 - это иллюстрация траектории поездки, сохраненной навигационным устройством;
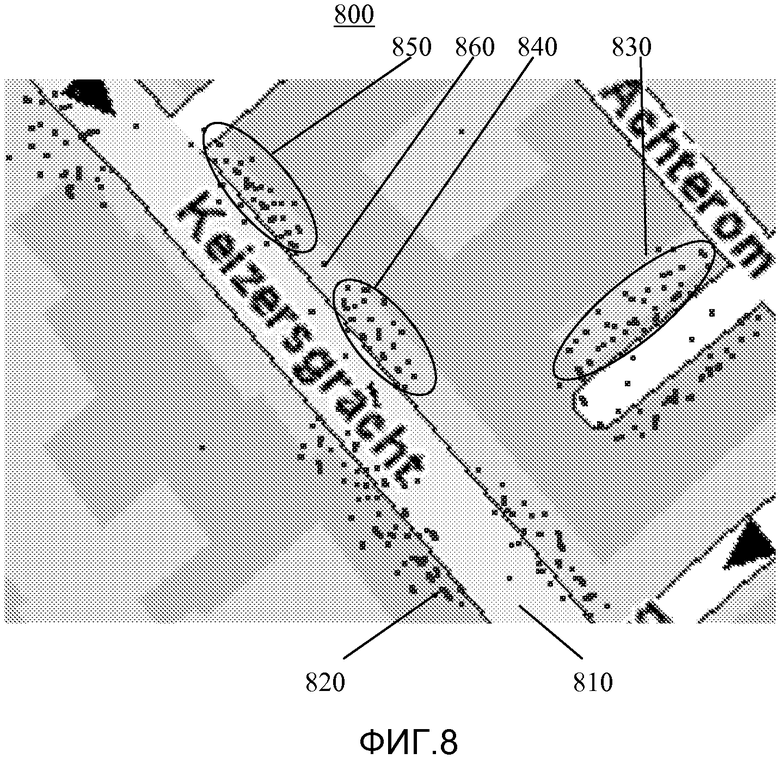
фиг.8 - это иллюстрация картографических данных и площадок для парковки, определенных сервером;
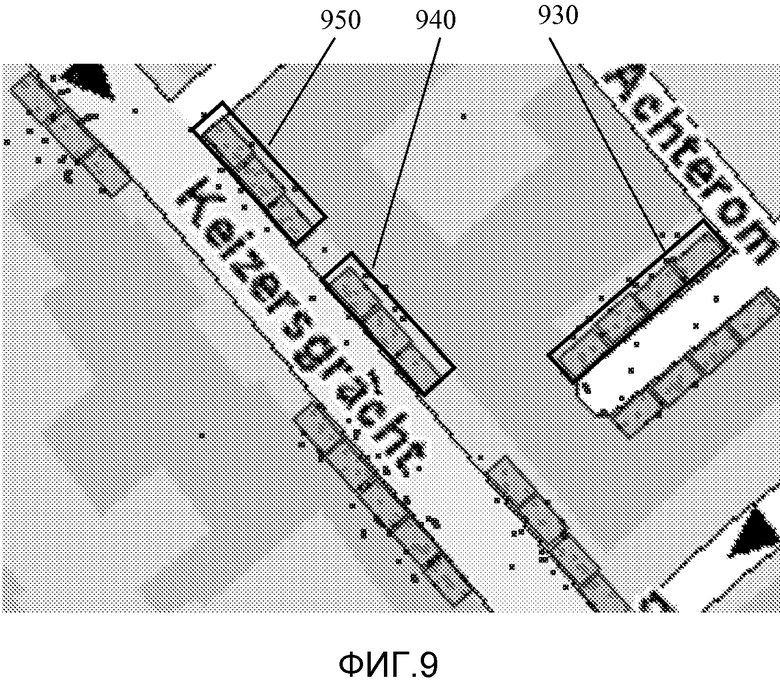
фиг.9 - это иллюстрация картографических данных и площадок для парковки, определенных сервером;
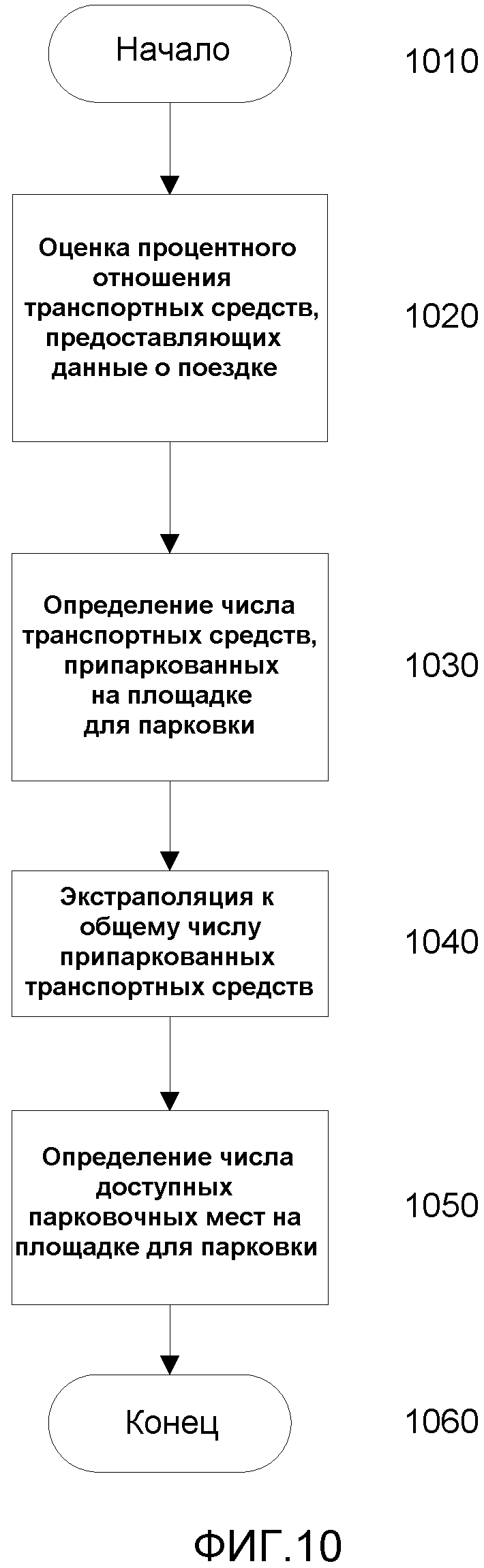
фиг.10 - это иллюстрация способа определения профиля доступности парковки согласно варианту осуществления изобретения;
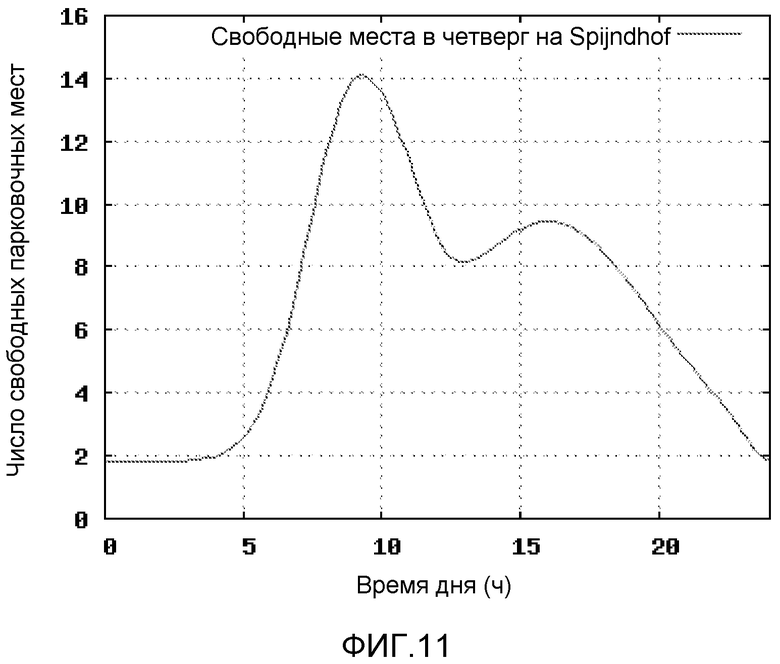
фиг.11 - это иллюстрация профиля доступности парковки для площадки для парковки согласно варианту осуществления изобретения;
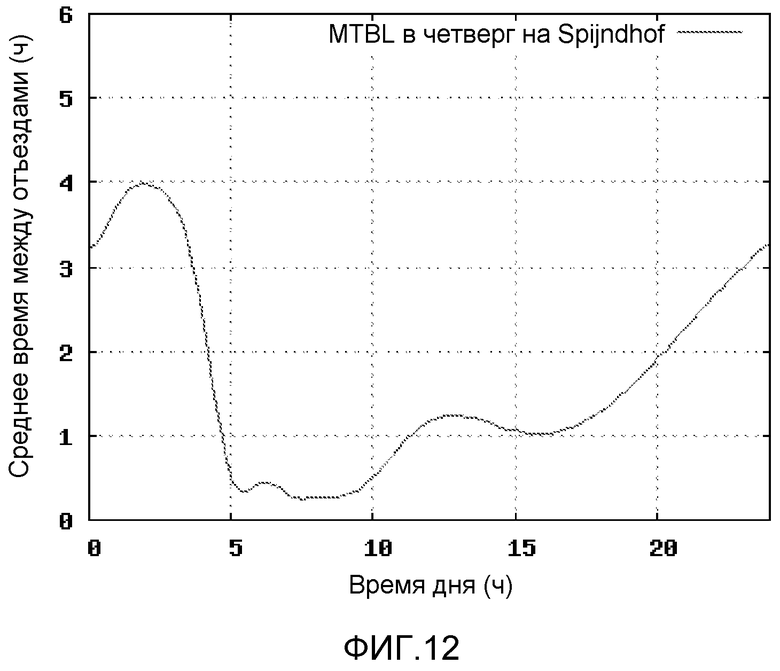
фиг.12 - это иллюстрация данных о движении на парковке для площадки для парковки согласно варианту осуществления изобретения;
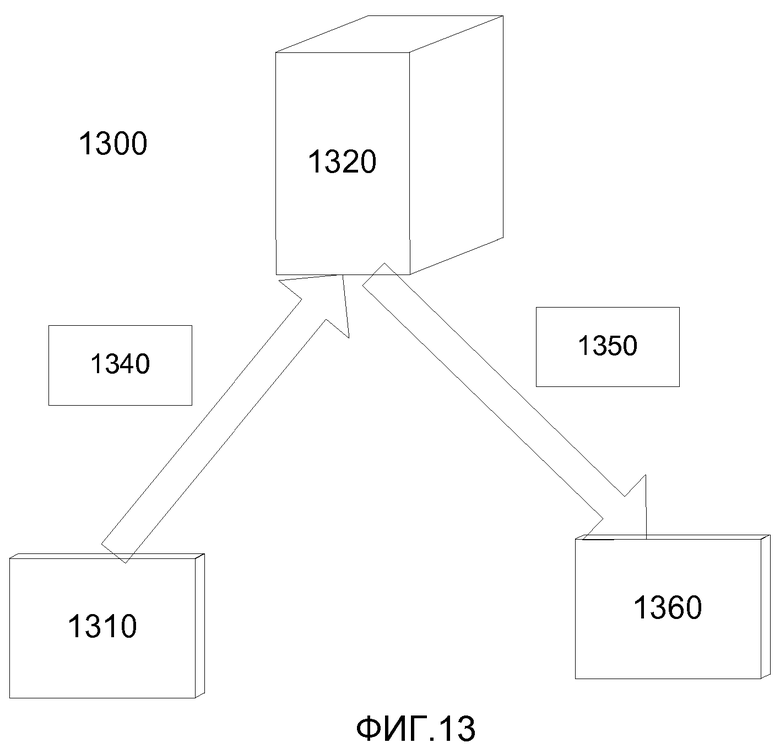
фиг.13 иллюстрирует систему согласно варианту осуществления изобретения;
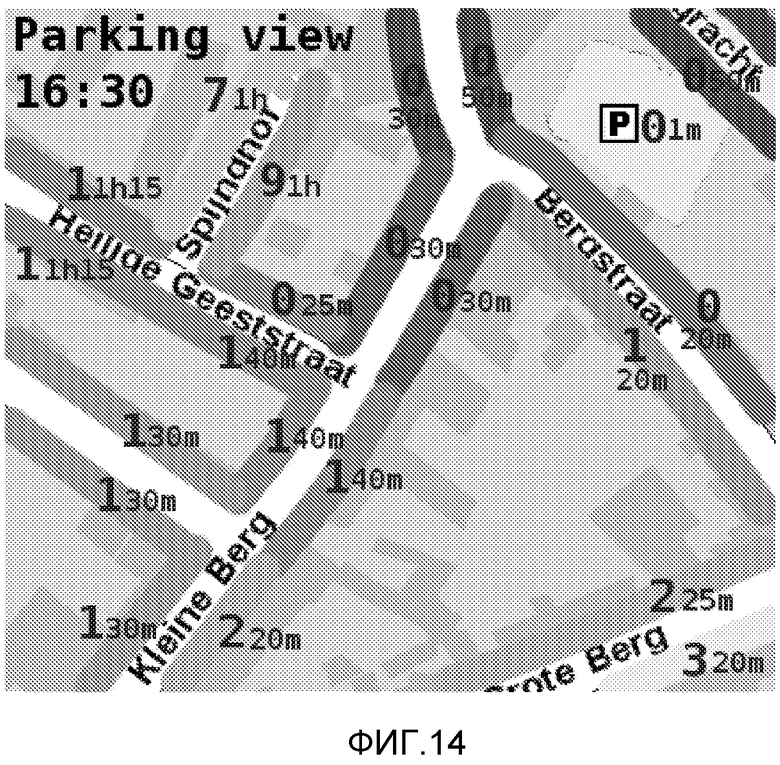
фиг.14 иллюстрирует отображение информации о парковках на навигационном устройстве согласно варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления
Предпочтительные варианты осуществления настоящего изобретения теперь поясняются с конкретной ссылкой на PND. Следует помнить, тем не менее, что идеи настоящего изобретения не ограничены PND, а наоборот, универсально применимы к любому типу устройства обработки, которое выполнено с возможностью выполнять навигационное программное обеспечение, с тем, чтобы предоставлять функциональность составления схемы маршрута и навигации. Из этого следует, что в контексте настоящей заявки навигационное устройство имеет намерение включать в себя (без ограничения) любой тип устройства составления схемы маршрута и навигации, независимо от того, осуществлено это устройство как PND, навигационное устройство, встроенное в транспортное средство, или фактически вычислительный ресурс (такой как настольный персональный компьютер или переносной персональный компьютер (PC), мобильный телефон или портативное цифровое устройство (PDA)), выполняющее программное обеспечение составления схемы маршрута и навигации.
Также будет очевидно из последующего, что идеи настоящего изобретения также имеют полезность в условиях, где пользователь не просит инструкций о том, как направляться от одной точки к другой, а просто желает быть обеспеченным видом данного местоположения. При таких обстоятельствах местоположение "пункта назначения", выбранное пользователем, не должно иметь соответствующего начального местоположения, от которого пользователь желает начать навигацию, и, как следствие, ссылки в данном документе на местоположение "пункта назначения" или, фактически, на вид "пункта назначения" не должны интерпретироваться так, чтобы означать, что является необходимым формирование маршрута, что должна произойти поездка к "пункту назначения", или, фактически, что наличие пункта назначения требует обозначения соответствующего начального местоположения.
С учетом вышеуказанных допущений, фиг.1 иллюстрирует примерное представление системы глобального позиционирования (GPS), подходящей для использования посредством навигационных устройств. Такие системы хорошо известны и используются в разнообразных целях. В общем, GPS - это навигационная система, построенная на спутниках и радио, способная к определению непрерывной позиции, скорости, времени и, в некоторых реализациях, информации о направлении для неограниченного числа пользователей. Ранее известная как NAVSTAR GPS заключает в себе множество спутников, которые двигаются над Землей на высокоточных орбитах. На основе таких точных орбит GPS-спутники могут транслировать свое местоположение любому числу приемных устройств.
GPS-система реализуется, когда устройство, специально оборудованное для приема GPS-данных, начинает сканирование радиочастот сигналов GPS-спутников. После приема радиосигнала от GPS-спутника устройство определяет точное местоположение этого спутника посредством одного из множества различных традиционных способов. Устройство продолжает сканирование, в большинстве реализаций, сигналов до тех пор, пока не получит, по меньшей мере, три различных спутниковых сигнала (заметим, что позиция не является нормальной, но может быть определена только с помощью двух сигналов, используя другие методики триангуляции). Осуществляя геометрическую триангуляцию, приемник использует три известные позиции для того, чтобы определять собственное двумерное местоположение относительно спутников. Это может быть выполнено известным образом. Кроме того, получение четвертого спутникового сигнала позволит приемному устройству вычислять свою трехмерную позицию посредством тех же геометрических вычислений известным образом. Данные о позиции и скорости могут быть обновлены в реальном времени на продолжительной основе неограниченным числом пользователей.
Как показано на фиг.1, GPS-система обозначена, в общем, ссылочным номером 100. Множество спутников 120 находятся на орбите около Земли 124. Нет необходимости синхронизировать орбиту каждого спутника 120 с орбитами других спутников 120, и фактически орбиты не синхронизированы. GPS-приемник 140 показан как принимающий сигналы 160 GPS-спутников в расширенном спектре от различных спутников 120.
Сигналы 160 расширенного спектра, непрерывно передаваемые от каждого спутника 120, используют стандарты частоты высокой точности совместно с чрезвычайно точными атомными часами. Каждый спутник 120 как часть своей передачи сигнала 160 данных передает поток данных, являющийся признаком этого конкретного спутника 120. Специалистам в соответствующей области техники должно быть очевидно, что устройство 140 GPS-приемника, в общем, принимает сигналы 160 GPS-спутников в расширенном спектре, по меньшей мере, от трех спутников 120 для устройства 140 GPS-приемника для того, чтобы вычислять свою двумерную позицию посредством триангуляции. Получение дополнительных сигналов, в результате сигналов 160 от всех из четырех спутников 120, дает возможность устройству 140 GPS-приемника вычислять свою трехмерную позицию известным образом.
Фиг.2 - это иллюстративное представление электронных компонентов навигационного устройства 200 согласно предпочтительному варианту осуществления настоящего изобретения, в формате блочных компонентов. Следует отметить, что структурная схема навигационного устройства 200 включает в себя не все компоненты навигационного устройства, а только компоненты, характерные для многих примеров.
Навигационное устройство 200 располагается внутри внешнего корпуса (не показан). Внешний корпус включает в себя процессор 210, соединенный с устройством 220 ввода и экраном 240 отображения. Устройство 220 ввода может включать в себя клавиатурное устройство, устройство голосового ввода, сенсорную панель и/или любое другое известное устройство ввода, используемое для ввода информации; а экран 240 отображения может включать в себя любой тип экрана отображения, например LCD-дисплей. В конкретной предпочтительной компоновке, устройство 220 ввода и экран 240 отображения интегрированы в интегрированное устройство ввода и отображения, включающее в себя ввод с сенсорной панели или с сенсорного экрана так, чтобы пользователю требовалось только касаться части экрана 240 отображения для того, чтобы выбирать один из множества вариантов отображения или активировать одну из множества виртуальных кнопок.
Навигационное устройство 200 может включать в себя устройство 260 вывода, например устройство звукового вывода (например, громкоговоритель). Поскольку устройство 260 вывода может воспроизводить слышимую информацию для пользователя навигационного устройства 200, также следует понимать, что устройство 220 ввода может также включать в себя микрофон и программное обеспечение для приема вводимых голосовых команд.
В навигационном устройстве 200 процессор 210 функционально соединен с устройством 220 ввода и может принимать вводимую информацию от него через соединение 225, и функционально соединен, по меньшей мере, с одним экраном 240 отображения и устройством 260 вывода через соединения 245 для того, чтобы выводить информацию. Дополнительно, процессор 210 функционально соединен с ресурсом 230 памяти через соединение 235 и дополнительно приспособлен принимать/отправлять информацию из/в порты 270 ввода/вывода (I/O) через соединение 275, при этом I/O-порт 270 является подключаемым к I/O-устройству 280, внешнему по отношению к навигационному устройству 200. Ресурс 230 памяти содержит, например, энергозависимую память, такую как оперативное запоминающее устройство (RAM), и энергонезависимую память, например цифровую память, такую как флэш-память. Внешнее I/O-устройство 280 может включать в себя, но не только, внешнее устройство для прослушивания, такое как наушники, например. Соединение с I/O-устройством 280 может дополнительно быть проводным или беспроводным соединением с любым другим внешним устройством, например с автомобильной стереосистемой для режима работы "хэндс-фри" ("свободные руки") и/или для режима работы голосовой активации, например для соединения с наушником или наушниками, и/или для соединения с мобильным телефоном, например, при этом соединение с мобильным телефоном может использоваться для установления соединения передачи данных между навигационным устройством 200 и Интернетом или любой другой сетью, например, и/или для установления соединения с сервером через Интернет или некоторую другую сеть, например.
Фиг.2 дополнительно иллюстрирует функциональное соединение между процессором 210 и антенной/приемником 250 через соединение 255, при этом антенна/приемник 250 могут быть GPS-антенной/приемником, например. Следует понимать, что антенна и приемник, отмеченные ссылочным номером 250, схематически объединены для иллюстрации, однако антенна и приемник могут быть отдельно расположенными компонентами, и антенна может быть плоской антенной GPS или спиралевидной антенной.
Дополнительно, как будет понятно специалисту в данной области техники, электронные компоненты, показанные на фиг.2, снабжаются электроэнергией посредством источника электропитания (не показан) традиционным методом. Как должны понимать специалисты в данной области техники, различные конфигурации компонентов, показанных на фиг.2, находятся в рамках объема настоящей заявки. Например, компоненты, показанные на фиг.2, могут поддерживать связь друг с другом через проводные и/или беспроводные соединения и т.п. Таким образом, рамки навигационного устройства 200 настоящей заявки включают в себя портативное и карманное навигационное устройство 200.
Кроме того, портативное или карманное навигационное устройство 200 на фиг.2 может быть соединено или "состыковано" известным методом с транспортным средством, таким как велосипед, мотоцикл, автомобиль или водное судно, например. Так, навигационное устройство 200 затем может быть отсоединено от пристыкованного местоположения для портативного или карманного навигационного использования.
Ссылаясь теперь на фиг.3, навигационное устройство 200 может устанавливать соединение по сети мобильной или дальней связи с сервером 302 через мобильное устройство (не показано) (такое как мобильный телефон, PDA и/или любое устройство с технологией мобильной телефонии), устанавливая цифровое соединение (такое как, например, цифровое соединение через известную технологию Bluetooth). Соответственно, через своего провайдера сетевых услуг мобильное устройство может установить сетевое соединение (через Интернет, например) с сервером 302. По существу, соединение через "мобильную" сеть устанавливается между навигационным устройством 200 (которое может быть, и зачастую является, мобильным, поскольку оно перемещается отдельно и/или в транспортном средстве) и сервером 302 для того, чтобы предоставлять для информации шлюз "в реальном времени" или, по меньшей мере, "самый актуальный".
Установление сетевого соединения между мобильным устройством (через поставщика услуг) и другим устройством, таким как сервер 302, с использованием Интернета (к примеру, всемирной паутины), например, может осуществляться известным методом. Он может включать в себя использование, например протокол с уровнями TCP/IP. Мобильное устройство может использовать любое число стандартов связи, например CDMA, GSM, WAN и т.д.
По сути, может быть использовано Интернет-соединение, которое осуществляется через соединение для передачи данных, например, через мобильный телефон или технологию мобильной телефонии в навигационном устройстве 200. Для этого соединения устанавливается Интернет-соединение между сервером 302 и навигационным устройством 200. Оно может быть выполнено, например, посредством мобильного телефона или другого мобильного устройства и GPRS-соединения (GPRS - протокол пакетной радиосвязи общего назначения). GPRS-соединение является высокоскоростным соединением для передачи данных для мобильных устройств, предоставляемым телекоммуникационными операторами; GPRS - это способ соединения с Интернетом.
Навигационное устройство 200 может дополнительно выполнять соединение с передачей данных с мобильным устройством и в конечном счете с Интернетом и сервером 302, посредством существующей технологии Bluetooth, например, известным методом, при этом протокол передачи данных может использовать любое число стандартов, например GSRM, стандарт протокола передачи данных для GSM-стандарта.
Навигационное устройство 200 может включать в себя свою собственную технологию мобильной телефонии в рамках самого навигационного устройства 200 (включающего в себя, например, антенну или необязательно использующего внутреннюю антенну навигационного устройства 200). Технология мобильной телефонии внутри навигационного устройства 200 может включать в себя внутренние компоненты, как задано выше, и/или может включать в себя вставляемые карты (модуль идентификации абонента или SIM-карта), полностью со всем необходимым для технологии мобильной телефонии и/или антенной, например. По существу, технология мобильной телефонии внутри навигационного устройства 200 может таким же образом устанавливать сетевые соединения между навигационным устройством 200 и сервером 302 через Интернет, например, методом, аналогичным методу любого мобильного устройства.
При настройках GPRS-телефона устройство с поддержкой Bluetooth может быть использовано для того, чтобы корректно работать с постоянно изменяющимся спектром моделей мобильных телефонов, производителей и т.п., например, конкретные для модели/производителя настройки могут быть сохранены в навигационном устройстве 200. Данные, хранимые для этой информации, могут быть обновлены.
На фиг.3 навигационное устройство 200 изображено как находящееся на связи с сервером 302 через общий канал 318 связи, который может быть реализован посредством любой из ряда различных компоновок. Сервер 302 и навигационное устройство 200 могут связываться, когда устанавливается соединение через канал 318 связи между сервером 302 и навигационным устройством 200 (заметим, что такое соединение может быть соединением с передачей данных через мобильное устройство, прямым соединением через персональный компьютер, через Интернет и т.д.)
Сервер 302 включает в себя, кроме других компонентов, которые могут быть не проиллюстрированы, процессор 304, функционально соединенный с памятью 306 и дополнительно функционально соединенный, через проводное или беспроводное соединение 314, с устройством 312 хранения данных большой емкости. Процессор 304 дополнительно функционально соединен с передатчиком 308 и приемником 310 для того, чтобы передавать информацию в навигационное устройство 200 и принимать информацию в и от него через канал 318 связи. Отправляемые и принимаемые сигналы могут включать в себя данные, связь и/или другие распространяемые сигналы. Передатчик 308 и приемник 310 могут быть выбраны или разработаны в соответствии с требованиями связи и технологией связи, используемыми в схеме связи для навигационной системы 200. Дополнительно следует отметить, что функции передатчика 308 и приемника 310 могут быть объединены в приемопередатчик сигналов.
Сервер 302 дополнительно соединен (или включает в себя) устройство 312 хранения большой емкости, при этом устройство 312 хранения большой емкости может быть соединено с сервером 302 через линию 314 связи. Устройство 312 хранения большой емкости содержит хранилище навигационных данных и картографической информации и также может быть отдельным от сервера 302 устройством или может быть включено в состав сервера 302.
Навигационное устройство 200 выполнено с возможностью обмениваться данными с сервером 302 через канал 318 связи и включает в себя процессор, память и т.д., как ранее описано относительно фиг.2, а также передатчик 320 и приемник 322, чтобы отправлять и принимать сигналы и/или данные через канал 318 связи, при этом отметим, что эти устройства дополнительно могут использоваться для того, чтобы обмениваться данными с устройствами, отличными от сервера 302. Дополнительно, передатчик 320 и приемник 322 выбирается или разрабатывается согласно требованиям связи и технологии связи, используемой в схеме связи для навигационного устройства 200, и функции передающего устройства 320 и приемного устройства 322 могут быть комбинированы в одно приемо-передающее устройство.
Программное обеспечение, сохраненное в памяти 306 сервера, предоставляет инструкции для процессора 304 и дает возможность серверу 302 предоставлять услуги навигационному устройству 200. Одна услуга, предоставляемая посредством сервера 302, заключает в себе обработку запросов от навигационного устройства 200 и передачу навигационных данных от устройства 312 хранения данных большой емкости в навигационное устройство 200. Другая услуга, предоставляемая посредством сервера 302, включает в себя обработку навигационных данных с использованием различных алгоритмов для требуемого варианта применения и отправку результатов этих вычислений в навигационное устройство 200.
Канал 318 связи, в общем, представляет среду распространения или путь, который соединяет навигационное устройство 200 и сервер 302. Как сервер 302, так и навигационное устройство 200 включают в себя передатчик для передачи данных через канал связи и приемник для приема данных через канал связи.
Канал 318 связи не ограничивается конкретной технологией связи. Кроме того, канал 318 связи не ограничен одной технологией связи; т.е. канал 318 может включать в себя несколько линий связи, которые используют разнообразие технологий. Например, канал 318 связи может быть выполнен с возможностью предоставлять путь для электрической, оптической и/или электромагнитной связи и т.п. По существу, канал 318 связи включает в себя, но не только, одно или комбинацию из следующего: электрические схемы, электрические проводники, например провода и коаксиальные кабели, оптоволоконные кабели, преобразователи, радиочастотные (RF) волны, атмосферу, пустое пространство и т.д. Дополнительно, канал 318 связи может включать в себя промежуточные устройства, такие как, например, маршрутизаторы, повторители, буферы, передатчики и приемники.
В одной иллюстративной компоновке канал 318 связи включает в себя телефонную и компьютерную сети. Дополнительно, канал 318 связи может иметь возможность приспосабливать беспроводную связь, например радиочастотную, сверхвысокочастотную, инфракрасную связь и т.п. Кроме того, канал 318 связи может приспосабливать спутниковую связь.
Сигналы связи, переданные через канал 318 связи, включают в себя, но не только, сигналы, как может быть запрошено или потребовано для данной технологии связи. Например, сигналы могут быть приспособлены для того, чтобы использоваться в технологии сотовой связи, такой как множественный доступ с временным разделением каналов (TDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с кодовым разделением каналов (CDMA), глобальная система подвижной связи (GSM) и т.д. Через канал 318 связи могут быть переданы как цифровые, так и аналоговые сигналы. Такие сигналы могут быть модулированными, зашифрованными и/или сжатыми сигналами, как требуется для технологии связи.
Сервер 302 включает в себя удаленный сервер, доступный посредством навигационного устройства 200 через беспроводной канал. Сервер 302 может включать в себя сетевой сервер, расположенный в локальной вычислительной сети (LAN), глобальной вычислительной сети (WAN), виртуальной частной сети (VPN) и т.п.
Сервер 302 может включать в себя персональный компьютер, такой как настольный компьютер или портативный компьютер, а канал 318 связи может быть кабелем, соединенным между персональным компьютером и навигационным устройством 200. Альтернативно, персональный компьютер может быть соединен между навигационным устройством 200 и сервером 302, чтобы устанавливать Интернет-соединение между сервером 302 и навигационным устройством 200. Альтернативно, мобильный телефон или другое карманное устройство может устанавливать беспроводное подключение к Интернету для соединения навигационного устройства 200 с сервером 302 через Интернет.
Навигационному устройству 200 может предоставляться информация из сервера 302 через загрузки информации, которые могут периодически обновляться автоматически или когда пользователь подсоединяет навигационное устройство 200 к серверу и/или могут быть более динамичными, когда более постоянное и частое соединение происходит между сервером 302 и навигационным устройством 200 через беспроводное мобильное устройство соединения и TCP/IP-соединение, например. Для многих динамических вычислений процессор 304 в сервере 302 может использоваться для обработки большого массива запросов по обработке, в то время как процессор 210 навигационного устройства 200 может также выполнять большую часть обработки и вычисления, зачастую независимо от соединения с сервером 302.
Как указано выше на фиг.2, навигационное устройство 200 включает в себя процессор 210, устройство 220 ввода и экран 240 отображения. Устройство 220 ввода и экран 240 отображения интегрированы в интегрированное устройство ввода и отображения, чтобы активировать как ввод информации (через непосредственный ввод, выбор меню и т.д.), так и отображение информации, например, через экран сенсорной панели. Таким экраном может быть сенсорный LCD-экран для ввода, например, как известно специалистам в данной области техники. Дополнительно, навигационное устройство 200 также может включать в себя любое дополнительное устройство 220 ввода и/или любое дополнительное устройство 241 вывода, такое как, например, устройство звукового ввода/вывода.
Фиг.4a и 4b являются видами в перспективе навигационного устройства 200. Как показано на фиг.4a, навигационное устройство 200 может быть блоком, который включает в себя интегрированное устройство 290 ввода и отображения (например, экран сенсорной панели) и другие компоненты по фиг.2 (в том числе, но не только, внутренний GPS-приемник 250, микропроцессор 210, источник питания, системы памяти 230 и т.д.).
Навигационное устройство 200 может быть размещено на кронштейне 292, который сам может быть прикреплен к приборной панели/окну/и т.д. транспортного средства с помощью присоски 294. Этот кронштейн 292 является одним примером стыковочной станции, с которой навигационное устройство 200 может быть состыковано.
Как показано на фиг.4b, навигационное устройство 200 может быть пристыковано или иным образом прикреплено к кронштейну 292 стыковочной станции, например, посредством захвата, присоединяющего навигационное устройство 200 к кронштейну 292. Навигационное устройство 200 тогда может поворачиваться на кронштейне 292, как показано стрелкой на фиг.4b. Чтобы отсоединять навигационное устройство 200 от стыковочной станции, может быть нажата кнопка на навигационном устройстве 200, например. Другие в равной степени подходящие компоновки для присоединения и разъединения навигационного устройства к стыковочной станции известны специалистам в данной области техники.
Обращаясь теперь к фиг.5 сопровождающих чертежей, ресурс 230 памяти хранит программу-загрузчик (не показана), которая выполняется процессором 210 для того, чтобы загружать операционную систему 470 из ресурса 230 памяти для выполнения функциональными аппаратными компонентами 460, которая обеспечивает среду, в которой может работать прикладное программное обеспечение 480. Операционная система 470 служит для того, чтобы управлять функциональными аппаратными компонентами 460, и находится между прикладным программным обеспечением 480 и функциональными аппаратными компонентами 460. Прикладное программное обеспечение 480 предоставляет операционную среду, включающую в себя GUI, которое поддерживает основные функции навигационного устройства 200, например просмотр карты, планирование маршрута, функции навигации и любые другие функции, ассоциированные с ним. Часть этой функциональности содержит модуль 490 ведения журнала поездки.
Модуль 490 ведения журнала поездки сохраняет информацию о поездках, ассоциированную с поездками, осуществленными навигационным устройством 200. Когда задействован, либо следуя предварительно определенному маршруту, либо при "свободном вождении", модуль 490 ведения журнала поездки сохраняет информацию о поездках, идентифицирующую маршрут, по которому следует навигационное устройство 200, т.е. информацию, идентифицирующую путь навигационного устройства 200, в файле поездки. В одном варианте осуществления модуль 490 ведения журнала поездки сохраняет информацию, идентифицирующую позицию навигационного устройства 200 в предварительно определенной системе координат с постоянными временными интервалами. Интервал времени может быть диапазоном в 5-10 секунд, хотя могут быть использованы другие интервалы времени. В другом варианте осуществления модуль 490 ведения журнала поездки сохраняет информацию, идентифицирующую позицию навигационного устройства 200, с предварительно определенными интервалами расстояния, например каждые 5 метров, хотя будет понятно, что могут быть использованы другие расстояния. Файл информации о поездках может быть сохранен как последовательность дискретных точек или недискретное представление поездки, т.е. как полиномиальная кривая. Кроме того, модуль 490 ведения журнала поездки может сохранять дополнительную информацию в файле поездки. В различных вариантах осуществления информация о поездках включает в себя информацию, указывающую, установлено ли навигационное устройство 200 на кронштейне 292, и/или информацию, указывающую рабочее состояние двигателя транспортного средства, т.е. запущенное или остановленное. Информация, касающаяся установки на кронштейне 292, может определяться посредством переключателя на корпусе навигационного устройства 200, в то время как информация, касающаяся состояния двигателя транспортного средства, может быть получена из связи навигационного устройства 200 с электрической системой транспортного средства.
Информация о поездках может быть сохранена в одном или более файлах поездок, сохраняемых в памяти 230 навигационного устройства 200. Может быть сохранен один файл поездки, содержащий информацию о поездках для одной или более поездок, осуществленных в единицу времени, т.е. день. Таким образом, в течение множества дней множество файлов поездок сохраняются в памяти 230, каждый файл поездки содержит информацию о поездках для соответствующего дня.
Один или более файлов поездок, сохраненных в памяти 230, периодически передаются серверу 302. Один или более файлов поездок передаются серверу 302 по каналу 318 связи для сохранения в запоминающем устройстве 312 большой емкости. Файлы поездок могут передаваться серверу 302 с постоянными интервалами, например один раз в неделю или всякий раз, когда доступен канал 318 связи. Таким образом, с течением времени сервер 302 накапливает файлы поездок, принятые от множества навигационных устройств 200, идентифицируя поездки, осуществленные этими навигационными устройствами 200.
В другом варианте осуществления информация о поездках может передаваться серверу 302 индивидуально для каждой поездки, например после завершения поездки.
С помощью информации о поездках, принятой сервером 302 от множества навигационных устройств 200, сервер 302 выполнен с возможностью определять площадки для парковки и профили доступности парковки (PAP) для этих площадок для парковки. Площадка для парковки - это географическая область, в которой множество пользователей навигационных устройств 200 припарковали транспортные средства. PAP содержит оценку доступности парковки в одном или более периодах времени для соответствующей площадки для парковки. Оценка основывается на исторических данных, принятых от множества навигационных устройств 200.
Фиг.6 иллюстрирует программное обеспечение, применяемое сервером 302. Аппаратные средства 560 сервера 302 поддерживают операционную систему 570, которая предоставляет операционную среду для исполнения прикладного программного обеспечения 580. Часть серверного прикладного программного обеспечения 580 содержит модуль 590 профиля доступности парковки (PAP), функция которого сейчас будет описана более подробно вместе с сопровождающими чертежами.
Фиг.7 иллюстрирует траекторию 700 поездки, сохраненную в файле поездки модулем 490 ведения журнала поездки, исполняемым в навигационном устройстве 200. Траектория 700 поездки записывается, пока навигационное устройство 200 находится в движении, т.е. перевозится транспортным средством. Поездка начинается в начальном местоположении A, заканчивается в местоположении D пункта назначения и проходит через промежуточные местоположения B и C. Траектория 700 поездки формируется посредством множества дискретных точек местоположений, сохраненных с постоянными интервалами времени, каждая из которых идентифицирует местоположение навигационного устройства 200 в это время. PAP-модуль 590, исполняющийся в процессоре 304 сервера 302, выполнен с возможностью исполнения процесса определения площадки для парковки посредством анализа информации о поездках, принятой от множества навигационных устройств, чтобы определять местоположение и размер одной или более площадок для парковки. В одном варианте осуществления сервер 302 определяет, что начало и окончание каждой поездки 900 находятся в пределах площадок для парковки. Однако достоверность процесса определения площадки для парковки может быть улучшена одним или более способами, как будет обсуждено.
Во-первых, в некоторых вариантах осуществления, модуль 490 ведения журнала поездки навигационного устройства 200 выполнен с возможностью включать в информацию о поездках указание того, было ли навигационное устройство 200 установлено на кронштейн 292 в то время, когда траектория 700 поездки была сохранена. Такая информация может быть сохранена как флаг в каждом местоположении, указывающий установку навигационного устройства 200 на кронштейн 292 в этом местоположении. Кроме того, модуль 490 ведения журнала поездки может указывать в информации о поездках, было ли навигационное устройство соединено с возможностью связи с транспортным средством, в котором навигационное устройство 200 установлено, например, посредством Bluetooth-соединения. После соединения с возможностью связи с транспортным средством модуль 490 ведения журнала поездки навигационного устройства 200 определяет и сохраняет информацию в файл поездки, идентифицирующую местоположения, когда двигатель транспортного средства запускается и останавливается. Модуль 490 ведения журнала поездки навигационного устройства 200 может, в одном варианте осуществления, получать информацию, относящуюся к запуску и остановке двигателя транспортного средства, по шине обмена данных транспортного средства, например CAN-шине. Альтернативно, звуковые данные, принятые от микрофона 220 навигационного устройства 200, могут быть анализированы, чтобы определять, работает ли двигатель транспортного средства. В других вариантах осуществления модуль 490 ведения журнала поездки навигационного устройства 200 может указывать в информации о поездках информацию об электропитании, указывающую, когда навигационное устройство 200 подсоединяется и отсоединяется к/от источника электропитания. Это будет указывать случай, когда электрическая система транспортного средства была активирована/дезактивирована или когда пользователь подсоединил и отсоединил навигационное устройство 200 к/от источника электропитания транспортного средства. Дополнительная достоверность может быть получена из объединения информации об электропитании с GPS-информацией. Например, если навигационное устройство 200 соединяется с активным источником электропитания и вскоре после этого принимается GPS-сигнал, может быть предположено местоположение начала поездки, и указание об этом сохраняется в информации о поездке. Другая информация, сохраненная в файле поездки, может указывать выходной сигнал одного или более из: акселерометра или датчика света, указывающих ускорение и уровни освещенности соответственно в навигационном устройстве 200.
Обращаясь к фиг.7, траектория 700 поездки содержит информацию, идентифицирующую два места, B и C, на маршруте из траектории 700 поездки. В этих местах информация о поездке указывает, что транспортное средство останавливалось и запускалось. Однако эти местоположения необязательно могут быть местоположениями парковок. Например, местоположение B может быть областью, приводящей к железнодорожному переезду, например, где транспортные средства должны ожидать несколько минут по некоторым обстоятельствам. Дополнительно, местоположение C может быть дорожным затором, с которым столкнулся пользователь в этой поездке. Для того чтобы выделять местоположения B и C как не являющиеся местоположениями для парковок, PAP-модуль 590, исполняющийся на сервере 302, в некоторых вариантах осуществления, выполнен с возможностью обнаруживать пиковое число предполагаемых местоположений для парковки в пределах отведенного времени. Например, если пользователи навигационных устройств только выглядят как припаркованные в местоположении в конкретное время, например 13:30-13:40, тогда возможно выделить это местоположение как не являющееся местоположением для парковки. Местоположение может быть периодической остановкой в движении транспорта, например на мосту. Дополнительно, если возможное местоположение парковки определено и другая информация о поездке, либо от того же, либо от других навигационных устройств 200, указывает, что они проезжают через местоположение в некоторых случаях с большей, чем предварительно определенной скоростью, например больше чем 20 км/ч, тогда это местоположение может быть выделено как не являющееся местоположением парковки.
Объединяя информацию о поездках от множества навигационных устройств 200, PAP-модуль 590, исполняющийся на сервере 302, выполнен с возможностью определения местоположений парковок. Если местоположение парковки определяется из информации о поездках, принятой от одного навигационного устройства 200, тогда информация о парковках может быть определена неправильно. Например, пользователь может припарковаться неправомерно, или на частном парковочном месте. Для того чтобы избежать этого, PAP-модуль 590 выполнен с возможностью идентифицировать местоположения парковок посредством требования того, чтобы множество навигационных устройств 200 были припаркованы в этой области. Таким образом, вероятность неправильного определения местоположения парковки снижается. PAP-модуль 590 может требовать, чтобы более чем предварительно определенное число n навигационных устройств были определены как припаркованные в этом местоположении в предварительно определенном периоде времени, прежде чем это местоположение определяется как местоположение парковки.
Фиг.8 показывает иллюстрацию картографических данных 800 около улицы Keizersgracht 810. По картографическим данным 800 множество местоположений парковок, определенных PAP-модулем 590, в которых припаркованы транспортные средства, каждое, указывается с помощью точек 820. Как отмечено выше, местоположение парковки может быть определено как начало и/или окончание траектории поездки, или начало или окончание траектории поездки, где удовлетворяются предварительно определенные условия, например навигационное устройство 200 установлено на кронштейне 292 в начале/конце траектории поездки. На фиг.8 можно наблюдать, что местоположения парковок сформированы в определенных скоплениях 830, 840, 850 (не все из которых указаны для ясности) в различных областях. Например, на улице Keizersgracht 810 множество скоплений 830, 840, 850 сформированы в областях, между которыми имеется единичное местоположение 860 для парковки. Следовательно, PAP-модуль 590 идентифицирует скопления в местоположениях парковок. Скопление может быть идентифицировано как область, имеющая более чем предварительно определенное число местоположений парковок на единицу площади в предварительно определенном периоде времени. Площадки 830, 840, 850 для парковки могут быть соотнесены в скопление посредством использования алгоритма подгонки контуров. Область между скоплениями 830, 840, 850 может быть выступающей наружу частью тротуара, примыкающего к дороге, на котором пользователь припарковался неправомерно, или результатом GPS-ошибки. Следовательно, единичное местоположение парковки не формирует часть любой из площадок 830, 840, 850 для парковки, поскольку оно не содержит множество местоположений для парковки. Информация, ассоциированная с каждой площадкой 830, 840, 850 для парковки, может быть сохранена в базе данных о парковках, доступной посредством сервера 302.
После того как контур и местоположение одной или более площадок 830, 840, 850 для парковки определяются PAP-модулем 590 на сервере 302, PAP-модуль 590 выполнен с возможностью определения числа парковочных мест, доступных на каждой площадке 830, 840, 850 для парковки. В одном варианте осуществления число парковочных мест, доступных на площадке для парковки, может быть определено посредством анализа информации о поездках, принятой от множества навигационных устройств 200, чтобы определять максимальное число транспортных средств, одновременно припаркованных на этой площадке для парковки. Однако возможно, что не все транспортные средства, одновременно припаркованные на площадке для парковки, включают в себя навигационное устройство 200, функционирующее так, чтобы сохранять информацию о поездке. В другом варианте осуществления число доступных парковочных мест определяется, принимая во внимание размер среднего транспортного средства и размер каждой площадки 830, 840, 850 для парковки. Для некоторых площадок 830, 840, 850 для парковки, таких как уличные площадки для парковки, транспортные средства имеют возможность припарковаться только в ряд, т.е. одно за другим. Для этих площадок длина транспортного средства сравнивается с длиной площадки для парковки. Идеально, длина транспортного средства, в котором используется навигационное устройство 200, будет известна, например, сообщена серверу 302 в файле поездки, чтобы точно определять число доступных мест. Однако, если это не известно, может быть использована средняя длина транспортного средства. Число доступных мест может быть определено как частное от деления длины площадки для парковки на длину транспортного средства (либо известную, либо среднюю), включая в расчет оценку среднего расстояния между паркующимися транспортными средствами. Дополнительно, оно может быть сравнено с максимальным числом транспортных средств, одновременно припаркованных на этой площадке для парковки, чтобы гарантировать, что оба значения согласуются с предварительно определенным числом транспортных средств. Для площадки для парковки, на которой множество транспортных средств могут быть припаркованы в двух измерениях, т.е. ширина достаточна, чтобы размещать более чем два припаркованных транспортных средства, число доступных парковочных мест может быть определено, также принимая во внимание соотношение ширины транспортного средства (либо известной, либо средней), включающей в себя оценку средней ширины между паркующимися транспортными средствами, с шириной площадки для парковки. Фиг.9 показывает дополнительную иллюстрацию картографических данных, показанных на фиг.8, указывающих определенное число парковочных мест, определенное PAP-модулем 590, которые должны быть на каждой площадке для парковки. Площадка 930 для парковки определяется PAP-модулем 590 как включающая в себя четыре размещенных линейно места для транспортных средств, площадка 940 для парковки имеет три места, и площадка 950 для парковки - три места.
PAP-модуль 590 на сервере 302 тогда выполнен с возможностью определять профиль доступности парковки (PAP) для каждой из площадок 930, 940, 950 для парковки. PAP для каждой площадки для парковки может также быть сохранен в базе данных о парковках, доступной серверу 302. База данных о парковках может также быть ассоциирована с картографической базой данных, так что множество PAP ассоциируются с участками дороги, идентифицированными в базе данных о парковках, так что сервер 302 имеет возможность находить множество PAP относительно участка дороги в картографической базе данных. Вариант осуществления способа определения профиля доступности парковки для площадки для парковки будет объяснен со ссылкой на фиг.10.
PAP указывает, для соответствующей площадки 930, 940, 950 для парковки, вероятность того, что парковочное место доступно в течение множества предварительно определенных периодов времени. В некоторых вариантах осуществления PAP содержит указание числа свободных парковочных мест и/или указание частоты, с которой транспортные средства освобождают парковочные места, для каждого из множества периодов времени. PAP-модуль 590 на сервере 302 определяет профиль доступности парковки для каждой площадки 930, 940, 950 для парковки для множества временных интервалов. Каждый день недели может быть поделен на ряд одинаковых или неодинаковых по размеру временных интервалов. В одном варианте осуществления каждый двадцати четырех часовой период может быть поделен на 1-часовые временные интервалы. Однако будет понятно, что могут быть использованы временные интервалы других продолжительностей. В другом варианте осуществления каждый день может быть поделен на шестнадцать временных интервалов продолжительностью 45 минут между 06:00 и 18:00 и восемь временных интервалов продолжительностью 90 минут между 18:00 и 06:00, когда ожидается, что парковочные места используются менее активно. Будет понятно, что продолжительности временных интервалов и часы деления предоставлены просто в качестве примера и что могут быть использованы другие продолжительности. Дополнительно, могут быть введены сезонные изменяющиеся временные интервалы/периоды. Например, использование различных продолжительностей временных интервалов в летние месяцы, июль и август, отражает, что многие в городах находятся в отпуске, и парковочные места могут быть более широко или свободно доступны. Таким образом, PAP делится на множество одинаковых или неодинаково разделенных временных интервалов или периодов времени.
Для каждого временного интервала PAP-модуль 590 на сервере 302 выполнен с возможностью определять данные о доступности парковки на основе принятой информации о поездке и оценки процента транспортных средств, оснащенных навигационными устройствами 200, функционирующими так, чтобы записывать информацию о поездках.
На этапе 1020 сервер 302 определяет оценку процентного отношения транспортных средств, оборудованных навигационными устройствами 200, функционирующими так, чтобы записывать информацию о поездках. Оценка может быть определена по всем периодам времени как общая оценка процентного отношения, дня, который включает в себя временной интервал, или может быть для самого временного интервала. Оценка для меньшей единицы времени, включающей в себя временной интервал, вероятно должна быть более точной. Оценка может быть определена, принимая во внимание процентное отношение транспортных средств, оборудованных навигационными устройствами 200, функционирующими так, чтобы записывать информацию о поездках, в предварительно определенной области. В одном варианте осуществления дорожный затор, близкий к площадке для парковки, используется, чтобы оценивать процентное отношение. Протяженность дорожного затора может быть определена, и число транспортных средств в этом дорожном заторе оценивается, принимая во внимание среднюю длину транспортного средства и среднее расстояние между транспортными средствами. Кроме того, число примыкающих переулков к дороге, испытывающей дорожный затор, может учитываться. Число транспортных средств, имеющих навигационные устройства 200, функционирующие так, чтобы записывать информацию о поездках, определенных как находящиеся в этом дорожном заторе из принятой информации о поездках, затем сравнивается с общим числом транспортных средств. Например, процентное отношение транспортных средств, оборудованных навигационными устройствами 200, функционирующими так, чтобы записывать информацию о поездках, в области, близкой к площадке для парковки, может быть определено как 20%.
На этапе 1030 сервер 302 определяет, для каждого временного интервала, число транспортных средств, имеющих навигационные устройства 200, функционирующие так, чтобы записывать информацию о поездках, которые припаркованы на этой площадке 930, 940, 950 для парковки, на основе принятой информации о поездках. Например, PAP-модуль 590 может определять, что должно быть в среднем 3,8 транспортных средств, для которых собирается информация о поездках, т.е. которые сохраняют информацию о поездках, которые припарковались на отдельной площадке 930, 940, 950 для парковки в течение временного интервала между 15:00 и 16:00 в четверг.
На этапе 1040, используя ранее определенную информацию, данные о доступности парковки, которые являются предполагаемым общим числом транспортных средств, припаркованных на этой площадке 930, 940, 950 для парковки в течение каждого временного интервала, могут быть определены на основе ранее оцененного процентного отношения транспортных средств, оборудованных навигационным устройством 200, функционирующим так, чтобы записывать информацию о поездках. Например, если в течение отдельного временного интервала для отдельной площадки 930, 940, 950 для парковки в среднем 3,8 транспортных средства паркуются на площадке для парковки, и 20% транспортных средств определяются как оборудованные навигационным устройством 200, функционирующим так, чтобы записывать информацию о поездке, тогда предполагается, что 19 транспортных средств должны быть припаркованы на этой площадке 930, 940, 950 для парковки в течение рассматриваемого временного интервала.
На этапе 1050 определяется число доступных парковочных мест. Если площадка для парковки имеет 25 парковочных мест, тогда данные о доступности парковки для этой площадки 930, 940, 950 для парковки в течение конкретного временного интервала указывают, что существуют 6 доступных мест, с помощью уравнения:
в котором Avail - это число доступных в настоящий момент парковочных мест, PPlaces - это общее число парковочных мест, определенное на площадке для парковки, PNDev - это среднее число навигационных устройств, определенных как находящихся на этой площадке для парковки в течение рассматриваемого периода времени, а RNDev - это доля транспортных средств, оборудованных навигационными устройствами.
Альтернативно или в дополнение к вышесказанному, PAP-модуль 590 сервера 302 может определять число доступных парковочных мест на основе максимального числа навигационных устройств 200, одновременно присутствующих на площадке 930, 940, 950 для парковки. Например, максимальное число навигационных устройств, присутствующих на площадке для парковки ночью, может считаться наиболее достоверным указанием, которое должно быть использовано. Преимущественно, использование такого определения на основе максимального числа навигационных устройств полезно, когда предполагается, что локальная доля транспортных средств, оборудованных навигационными устройствами, отличается от обычной доли транспортных средств, оборудованных навигационными устройствами, т.е. большее число транспортных средств, оборудованных навигационными устройствами, паркуются в этой местности. Число доступных парковочных мест в данное время может тогда быть вычислено посредством следующего уравнения:

где LNDev - это число навигационных устройств, определенных как покинувшие эту площадку для парковки в течение первого периода, например в дневное время, MaxNDev - максимальное число навигационных устройств, одновременно находящихся на площадке для парковки в течение второго периода, например в ночное время. Таким образом, число доступных парковочных мест может быть определено, принимая во внимание локальное число транспортных средств, оборудованных навигационными устройствами.
Данные о движении на парковке могут определяться сервером 302 похожим образом, что и данные о доступности парковки. Данные о движении на парковке указывают, как регулярно транспортные средства покидают площадку для парковки или освобождают парковочные места на площадке для парковки. Во-первых, число транспортных средств, оборудованных навигационными устройствами 200, функционирующими так, чтобы сохранять информацию о поездке, которые покинули или переместились с площадки 930, 940, 950 для парковки в течение временного интервала, определяется сервером 302 из принятой информации о поездках. Среднее время между отъездами транспортных средств (MTBVL) для этого временного интервала и площадки 930, 940, 950 для парковки может быть определено посредством деления продолжительности временного интервала на число транспортных средств, отъезжающих в этом временном интервале, чтобы вычислять MTBVL в единицах минут для каждого транспортного средства.
PAP содержит, для каждого местоположения, данные о доступности парковки, которые являются переменным по времени указанием числа доступных мест. Фиг.11 показывает иллюстрацию данных о доступности парковки для географического местоположения в течение 24-часового периода. Географическим местоположением является жилая улица с названием Spijndhof в четверг. Как может быть видно, в течение времени приблизительно между 0:00 и 5:00 часами приблизительно 2 места доступны. Около 06:00-09:00 число доступных мест увеличивается, например, поскольку люди уезжают на работу. Около 10:00 число доступных мест слегка падает, затем растет приблизительно от 13:00 до 16:00, когда число доступных мест постепенно падает почти до полуночи.
В некоторых вариантах осуществления PAP дополнительно содержит данные о движении на парковке, которые являются переменным по времени указанием частоты, с которой парковочные места становятся доступными. Т.е., частоты, с которой припаркованные транспортные средства покидают парковочные места. PAP указывает MTBVL. Как показано на фиг.12, данные о движении на парковке указывают, что между полуночью и 04:00 MTBVL относительно высоко, между 3-4 часами, указывая, что транспортные средства не уезжают очень часто. Однако, когда время достигает 04:00, MTBVL падает до приблизительно 30 минут, которые сохраняются почти до 10:00, когда оно постепенно растет в течение оставшегося дня.
Кроме того, в некоторых вариантах осуществления, PAP указывает информацию о тарифах для одной или более площадок для парковки. Информация о тарифах может предоставляться для любой площадки 930, 940, 950 для парковки, которая определена как требующая платы за парковку, т.е. коммерчески обслуживаемая или платная парковка. Информация о тарифах может быть получена от органа местной власти, например управы или государственной структуры, управляющей площадкой для парковки, или от коммерческого организатора площадки для парковки. Информация о тарифах может быть сохранена в базе данных о парковках, ассоциированной с PAP.
После того как PAP определен для площадки для парковки, он может быть сообщен навигационному устройству. Фиг.13 иллюстрирует систему согласно варианту осуществления настоящего изобретения. Система 1300 содержит сервер 1320, соединенный с возможностью связи с первым навигационным устройством 1310, от которого принимается информация 1340 о поездке, как ранее описано. Сервер 1320 оперативно определяет местоположение площадок 930, 940, 950 для парковки и множество PAP для этих площадок 930, 940, 950 для парковки, которые сохраняются в базе данных о парковках (не показана), доступной посредством сервера 1320. Один или более PAP 1350 передаются второму навигационному устройству 1360 сервером 1320. Второе навигационное устройство 1360 может быть тем же устройством, что и первое навигационное устройство 1310. Т.е., PAP может быть отправлен устройству, ранее сообщившему информацию о поездке серверу 1320. Информация 1340 о поездке может быть отправлена серверу 1320 первым навигационном устройством 1310 по запросу сервера 1320 или может быть передана навигационным устройством 1310, когда связь с сервером 1320 возможна. PAP 1350 может быть передан второму навигационному устройству 1360 по запросу второго навигационного устройства 1360. Второе навигационное устройство 1360 может запросить один или более PAP 1350, которые должны быть переданы с сервера 1320 для площадок 930, 940, 950 для парковки в пределах предварительно определенного расстояния от второго навигационного устройства 1360. Например, второе навигационное устройство 1360 может иметь режим парковки, который после включения, либо посредством пользовательского ввода, либо когда второе навигационное устройство находится в пределах предварительно определенного расстояния от местоположения пункта назначения, передает сообщение-запрос PAP серверу 1320, чтобы запрашивать передачу одного или более PAP. В одном варианте осуществления сервер 1320 может извлекать один или более PAP из базы данных о парковках и затем передавать эти PAP 1350 второму навигационному устройству 1360 с предварительно определенными интервалами времени. Второе навигационное устройство может затем использовать принятые PAP 1350, чтобы предоставлять информацию пользователю о доступности парковочных мест, близких к текущему местоположению, на устройстве 240 отображения, например, как показано на фиг.14.
Фиг.14 иллюстрирует область картографических данных, показывающую улицы и площадки для парковки рядом с этими улицами. Картографические данные, включающие в себя указание площадок для парковки, могут быть отображены вторым навигационным устройством 1360 на его дисплее. Числовое указание предоставляется следом для каждой площадки для парковки, указывая, сколько парковочных мест предположительно будут доступными на этой площадке для парковки в конкретное время, например в текущий момент времени. Указание MTBVL для каждой площадки для парковки также предоставляется, так что, даже если нет мест, доступных в текущий момент, пользователь может определять вероятность того, что место станет доступным на этой площадке для парковки. Каждая площадка для парковки может отображаться в цвете на основе одного или обоих из числа предполагаемых доступных парковочных мест и/или MTBVL.
Будет понятно из вышеописанного, что идеи настоящего изобретения предоставляют компоновку, посредством которой информация о парковках определяется для площадок для парковки на основе информации о поездках, принятой от навигационных устройств. Преимущественно, информация о парковках может быть определена для площадок для парковки, таких как уличные площадки для парковки, которые коммерчески не обслуживаются и т.д. Информация о парковках указывает доступность парковочных мест и, в некоторых вариантах осуществления, частоту, с которой транспортные средства освобождают парковочные места.
Также следует принимать во внимание, что хотя различные аспекты и варианты осуществления настоящего изобретения описаны выше, объем настоящего изобретения не ограничен конкретными компоновками, изложенными в данном документе, а наоборот, простирается так, чтобы охватывать все компоновки и модификации и изменения в них, которые попадают в пределы объема прилагаемой формулы изобретения.
Например, хотя варианты осуществления, описанные в вышеприведенном подробном описании, ссылаются на GPS, следует отметить, что навигационное устройство может использовать любой вид технологии измерения положения в качестве альтернативы (или фактически помимо) GPS. Например, навигационное устройство может использовать другие глобальные навигационные спутниковые системы, такие как европейская система Galileo. Также оно не ограничено спутниками, а может легко функционировать при использовании наземных радиомаяков или любого другого вида системы, которая дает возможность устройству определять свое географическое местоположение.
Специалисты в данной области техники также должны хорошо понимать, что хотя предпочтительный вариант осуществления реализует некоторую функциональность посредством программного обеспечения, эта функциональность в равной степени может быть реализована исключительно в аппаратных средствах (например, посредством одной или более ASIC (специализированных интегральных схем)) или фактически посредством сочетания аппаратных средств и программного обеспечения. По сути, объем настоящего изобретения не должен быть интерпретирован как ограничиваемый только реализацией в программном обеспечении.
Наконец, также следует отметить, что хотя прилагаемая формула изобретения излагает конкретные комбинации признаков, описанных в данном документе, объем настоящего изобретения не ограничен конкретными комбинациями, приводимыми ниже, а вместо этого распространяется так, чтобы охватывать любую комбинацию раскрытых в данном документе признаков или вариантов осуществления независимо от того, перечислена ли эта конкретная комбинация специально в прилагаемой формуле изобретения в этот момент.
Изобретение относится к устройству и способу для определения информации о парковках. Технический результат заключается в повышении вероятности определения доступности места для парковки на площадке, даже когда эта площадка для парковки идентифицирована в картографических данных. Технический результат достигается за счет определения, посредством сервера на основе информации о поездках профиля доступности парковки для, по меньшей мере, одной из площадок для парковки, указывающего вероятность доступности парковочного места на парковочной площадке в течение множества периодов времени. 2 н. и 13 з.п. ф-лы, 14 ил.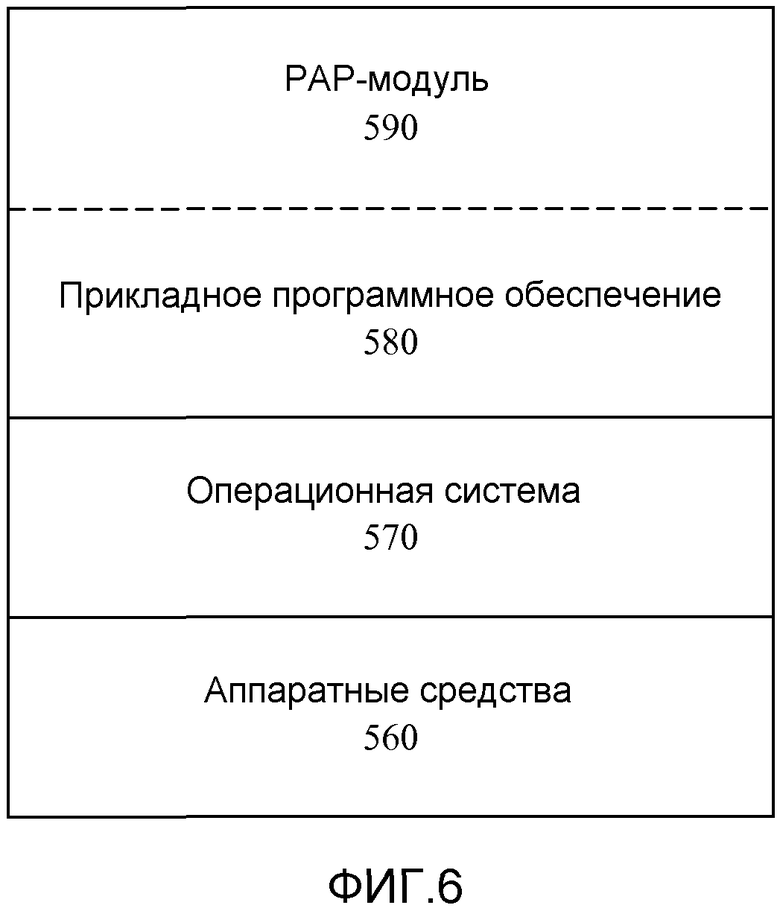
1. Способ определения информации о парковках, содержащий этапы, на которых:
принимают, на сервере (302), информацию о поездках от множества навигационных устройств (200), информация о поездках указывает одну или более поездок, осуществленных каждым навигационным устройством (200);
способ, отличающийся тем, что:
определяют, посредством сервера (302) на основе информации о поездках, информацию о парковках, указывающую географическое местоположение одной или более площадок (930, 940, 950) для парковки,
дополнительно, посредством сервера (302) на основе информации о поездках, определяют профиль (1350) доступности парковки для по меньшей мере одной из площадок (930, 940, 950) для парковки, указывающий вероятность доступности парковочного места на парковочной площадке в течение множества периодов времени.
2. Способ по п.1, содержащий этап, на котором определяют, для одной или более площадок (930, 940, 950) для парковки, число парковочных мест на каждой площадке (930, 940, 950) для парковки.
3. Способ по п.1 или 2, в котором определение географического местоположения одной или более площадок (930, 940, 950) для парковки основано на информации о поездках, указывающей, что предварительно определенное число транспортных средств припарковалось на каждой площадке для парковки в течение предварительно определенного периода времени.
4. Способ по п.1, в котором:
профиль (1350) доступности парковки указывает число парковочных мест, доступных на каждой площадке (930, 940, 950) для парковки в течение множества периодов времени.
5. Способ по п.4, в котором определение профиля (1350) доступности парковки основано на доле транспортных средств, имеющих навигационные устройства (200), функционирующие так, чтобы сохранять информацию о поездках, и числе навигационных устройств (200), функционирующих так, чтобы определять информацию о поездках, присутствующих на каждой площадке (930, 940, 950) для парковки в течение множества периодов времени.
6. Способ по п.4 или 5, в котором профиль (1350) доступности парковки дополнительно указывает число транспортных средств, покидающих каждую площадку (930, 940, 950) для парковки в единицу времени в течение множества периодов времени.
7. Способ по п.1, содержащий этап, на котором передают с сервера (302) в навигационное устройство (200) профиль (1350) доступности парковки.
8. Серверный компьютер (302) для определения информации о парковках, содержащий:
устройство (310) передачи данных для приема информации о поездках от навигационных устройств (200), информация о поездках указывает одну или более поездок, осуществленных каждым навигационным устройством (200);
отличающийся тем, что:
модуль (590) профиля доступности парковки (PAP), исполняющийся на сервере (302), при этом PAP-модуль (590) выполнен с возможностью определять, из информации о поездках, информацию о парковках, указывающую географическое местоположение одной или более площадок (930, 940, 950) для парковки, а также определять профиль (1350) доступности парковки для по меньшей мере одной из площадок (930, 940, 950) для парковки, указывающий вероятность доступности парковочного места на парковочной площадке в течение множества периодов времени.
9. Серверный компьютер (302) по п.8, в котором PAP-модуль (590) выполнен с возможностью определять, для одной или более площадок (930, 940, 950) для парковки, число парковочных мест на каждой площадке для парковки.
10. Серверный компьютер (302) по п.8 или 9, в котором PAP-модуль (590) выполнен с возможностью определять географическое местоположение одной или более площадок (930, 940, 950) для парковки согласно информации о поездках, указывающей, что предварительно определенное число транспортных средств припарковалось на каждой площадке (930, 940, 950) для парковки в течение предварительно определенного периода времени.
11. Серверный компьютер (302) по п.8, в котором профиль (1350) доступности парковки, указывает число парковочных мест, доступных на каждой площадке (930, 940, 950) для парковки в течение множества периодов времени.
12. Серверный компьютер (302) по п.11, в котором PAP-модуль (590) выполнен с возможностью определять профиль (1350) доступности парковки на основе, по меньшей мере, частично, доли транспортных средств, имеющих навигационные устройства (200), функционирующие так, чтобы сохранять информацию о поездках, и числа навигационных устройств (200), функционирующих так, чтобы определять информацию о поездках, присутствующих на каждой площадке (930, 940, 950) для парковки в течение множества периодов времени.
13. Серверный компьютер (302) по п.11 или 12, в котором PAP-модуль (590) выполнен с возможностью включать в профиль (1350) доступности парковки указание числа транспортных средств, покидающих каждую площадку (930, 940, 950) для парковки в единицу времени в течение множества периодов времени.
14. Серверный компьютер (302) по п.11 или 12, в котором PAP-модуль (590) выполнен с возможностью передавать один или более профилей доступности парковки навигационному устройству (200) в ответ на запрос, принятый от навигационного устройства (200), через средство (310) передачи данных.
15. Серверный компьютер (302) по п.14, в котором запрос включает в себя информацию, указывающую текущее местоположение навигационного устройства (200), и PAP-модуль (590) выполнен с возможностью выбирать один или более профилей (1350) доступности парковки, которые должны быть переданы навигационному устройству (200), согласно информации о местоположении.
| US 6266609 B1, 24.07.2001 | |||
| US 5860020 A1, 12.01.1999 | |||
| US 6493676 B1, 10.12.2002 | |||
| US 6559776 B2, 06.05.2003 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СИСТЕМА ДЛЯ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ | 1996 |
|
RU2172520C2 |

