Предлагаемое изобретение относится к области военной техники, в частности к управляемым реактивным снарядам (УРС) нестабилизированным по углу крена.
Аналогом данного технического решения является управляемый вращающийся снаряд (Патент RU №2438095 от 27.12.2011). Снаряд содержит электронную аппаратуру управления, органы управления, выполненные в виде аэродинамических рулей, и чувствительные элементы отклонения снаряда от заданной траектории, которые скомпонованы на базе двух микромеханических гироскопов (ММГ), размещенных на двух взаимно перпендикулярных платах с установленными на них радиоэлементами, обеспечивающими совмещение сигналов ММГ, поступающих в электронную аппаратуру управления, с ее собственными сигналами, которые поступают на органы управления. Платы закреплены на общем основании, установленном перпендикулярно продольной оси снаряда X так, что чувствительные оси ММГ перпендикулярны друг другу и съюстированы с соответствующими поперечными осями Y и Z снаряда, причем основание развернуто в направлении вращения снаряда относительно аэродинамических рулей на угол, величина которого эквивалентна времени формирования команд для органов управления. Повышается точность и увеличивается дальность стрельбы артиллерийскими снарядами
Недостатком данного реактивного снаряда является снижение его точности при увеличении времени полета, обусловленное накапливающимися ошибками, вызванными вращением (вместе с корпусом снаряда) чувствительных элементов, определяющих параметры ориентации и навигации снаряда на траектории.
Устройство реализовано в способе функционирования УРС (Патент RU №2164657 от 27.03.2001). УРС запускается в сторону цели по штатной (для конкретной головки самонаведения (ГСН)) баллистической траектории (в т.ч. с подвижного основания и по подвижной цели). При подходе к цели ГСН осуществляет просмотр зоны поражения, выделяет объект атаки и переходит в режим самонаведения на цель. Согласование динамических характеристик (быстродействия) приводов управления и геометрии аэродинамических рулей (производительности газодинамического управления) УРС с возможностями конкретного типа ГСН, инерционными и аэродинамическими параметрами PC производится (с целью исключения доработок штатных неуправляемых PC) исключительно за счет варьирования конструктивно-компоновочными особенностями модулей управляющего блока (УБ). Принципиально важным моментом является стабилизация носового модуля УБ. Следует отметить, что использование в рамках данного технического предложения PC баллистического типа со стабилизирующим проворотом по крену позволяет исключить из состава бортовой аппаратуры управления дорогие и сложные в эксплуатации системы инерциальной навигации, обязательные для "небаллистических" летательных аппаратов (не имеющих протяженного т.н. "пассивного" участка траектории полета вплоть до зоны включения ГСН).
Недостатком прототипа является сложность исполнения и условий функционирования приводов управления аэродинамических (или иных) рулей, две пары которых должны обеспечивать необходимые значения углов курса и тангажа при одновременном поддержании нулевого значения угла крена.
Технической задачей настоящего решения является упрощение конструкции и повышение боевой эффективности управления реактивных снарядов, путем расширения диапазонов дальности полета, повышения эффективности действия в районе цели.
Поставленная техническая задача решается следующим образом. УРС, включает управляющий и разгонный блоки, причем управляющий блок выполнен в виде двух модулей: носового с органами управления PC, и хвостового. Между собой указанные модули соединены посредством цилиндрического шарнира с осью вращения, совпадающей с продольной осью разгонного блока, при этом хвостовой модуль управляющего блока выполнен в виде единого конструктивного целого с разгонным блоком; на оси цилиндрического шарнира, (жестко связанной с разгонным блоком) расположен ротор электрического моментного двигателя, статор которого жестко связан с корпусом носового модуля управляющего блока (управляющий модуль); на внешней поверхности носового модуля управляющего блока (управляющего модуля) расположена одна пара аэродинамических рулей, жестко связанных с указанной поверхностью (без возможности поворота относительно указанной поверхности), установленная под фиксированным углом к продольной оси управляющего модуля.
Изобретение поясняется графическим материалом.
На фиг.1 представлена конструкция УРС.
На корпусе 1 (разгонный блок с боевой частью) расположены косопоставленные стабилизаторы 2. Корпус 1 выполнен в виде единого конструктивного целого с хвостовым модулем управляющего блока, представляющим собой вал 3 цилиндрического шарнира, ось вращения которого совпадает с продольной осью корпуса 1. На валу 3 в подшипниках 4 установлен носовой модуль управляющего блока (управляющий модуль) 5. В корпусе 6 которого установлен электрический моментный двигатель 7, включающий в себя:
- ротор 8, жестко связанный с валом 3;
- статор 9, жестко связанный с корпусом 6;
- датчики угла 10, определяющие взаимное положение ротора 8 и статора 9.
К корпусу 6 управляющего модуля 5 жестко крепиться шасси 11, на котором, в свою очередь, крепятся:
- одна пара неподвижных относительно управляющего модуля 5 рулей 12, повернутых относительно продольной оси снаряда на фиксированный угол α, величина которого, в зависимости от вида УРС, может лежать в пределах 6°…14°;
- источник питания 13;
- блок загрузки полетной информации 14;
- блок управления креном 15;
- блок управления полетом 16;
- блок системы навигации и ориентации 17, продольная ось которого совпадает с продольной осью снаряда, содержащей блок микромеханических чувствительных элементов и спутниковую навигационную систему.
Устройство работает следующим образом. При запуске УРС корпус 1 начинает вращаться относительно своей продольной оси за счет скольжения по винтовой направляющей стартового устройства (пускового контейнера). В полете скорость вращений УРС может меняться за счет тангенциальных сил, обусловленных косопоставленными стабилизаторами 2. Указанное вращение за счет сил трения, действующих в подшипниках 4, передается на управляющий модуль 5. В результате управляющий модуль 5 начинает поворачиваться относительно продольной оси снаряда. Отклонение модуля 5 от заданного (относительно вертикали) положения (не обязательно нулевого) фиксируется блоком системы навигации и ориентации 17 и поступает на вход блока управления полетом 16. Блок управления полетом 16, с учетом данных, поступивших от блока загрузки полетной информации 14, формирует командный сигнал, поступающий на вход блока управления креном 15. В соответствии с поступающими командами и сигналом от датчика угла 10, блок управления креном 15 подает необходимое напряжение на статор 9 электрического моментного двигателя 7. В результате возникает электромагнитный момент, действующий на ротор 8, возвращающий управляющий модуль 5 в заданное положение.
При необходимости изменения (коррекции) траектории движения УРС по курсу и/или высоте блок управления полетом 16, с учетом данных, поступивших от блока загрузки полетной информации 14, и данных о текущих координатах УРС, поступающих от блока системы навигации и ориентации 17, формирует соответствующие командные сигналы. В соответствии с поступающими командами и сигналом от датчика угла 10, блок управления креном 15 подает необходимое напряжение на статор 9 электрического моментного двигателя 7. В результате возникает электромагнитный момент, действующий на ротор 8, поворачивающий управляющий модуль 5 на заданный угол, что, в свою очередь, меняет направление вектора подъемной силы рулей относительно осей системы координат, связанной с Землей. Таким образом, при повороте управляющего модуля относительно его продольной оси на углы, лежащие в пределах 0°…±90°, происходит управление УРС по курсу, а при повороте на угол 180° - по высоте, вплоть до вертикализации УРС. Данное техническое решение позволяет:
- упростить конструкцию УРС за счет замены двух пар приводов управления рулями (или других органов управления) на одну пару неподвижных рулей (или других органов управления) и электрический моментный двигатель;
- повысить дальность полета УРС путем реализации режима подпланирования, обусловленного фиксированным углом расположения рулей относительно продольной оси УРС;
- повысить эффективность действия УРС в районе цели, за счет его вертикализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ СНАРЯДОМ | 2012 |
|
RU2502937C1 |
| Система коррекции траектории вращающегося артиллерийского снаряда | 2024 |
|
RU2838369C1 |
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| Взрыватель корректирующий для вращающегося снаряда и способ его применения | 2019 |
|
RU2725331C1 |
| УПРАВЛЯЮЩИЙ БЛОК ДООСНАЩЕНИЯ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2272241C2 |
| АВТОНОМНЫЙ БЛОК УПРАВЛЕНИЯ РЕАКТИВНОГО СНАРЯДА | 2016 |
|
RU2627334C1 |
| УПРАВЛЯЮЩИЙ БЛОК РЕАКТИВНОГО СНАРЯДА | 2012 |
|
RU2505777C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| КРУГЛОСУТОЧНАЯ ВСЕПОГОДНАЯ ВЫСОКОТОЧНАЯ КОРРЕКТИРУЕМАЯ АВИАБОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С АВТОМАТОМ ГЛОБАЛЬНОЙ СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2317515C1 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
Изобретение относится к области военной техники, в частности к управляемым реактивным снарядам. Управляемый реактивный снаряд включает управляющий и разгонный блоки. Управляющий блок выполнен в виде двух модулей: носового с органами управления реактивным снарядом и хвостового. Между собой модули управляющего блока соединены посредством цилиндрического шарнира с осью вращения, совпадающей с продольной осью разгонного блока. Хвостовой модуль управляющего блока выполнен в виде единого конструктивного целого с разгонным блоком. На оси цилиндрического шарнира, жестко связанной с разгонным блоком, расположен ротор электрического моментного двигателя. Статор двигателя жестко связан с корпусом носового модуля управляющего блока. На внешней поверхности носового модуля управляющего блока расположена одна пара аэродинамических рулей, жестко связанных с внешней поверхностью носового модуля. Рули установлены под фиксированным углом к продольной оси управляющего модуля. Достигается упрощение конструкции и повышение боевой эффективности управления реактивных снарядов. 1 ил.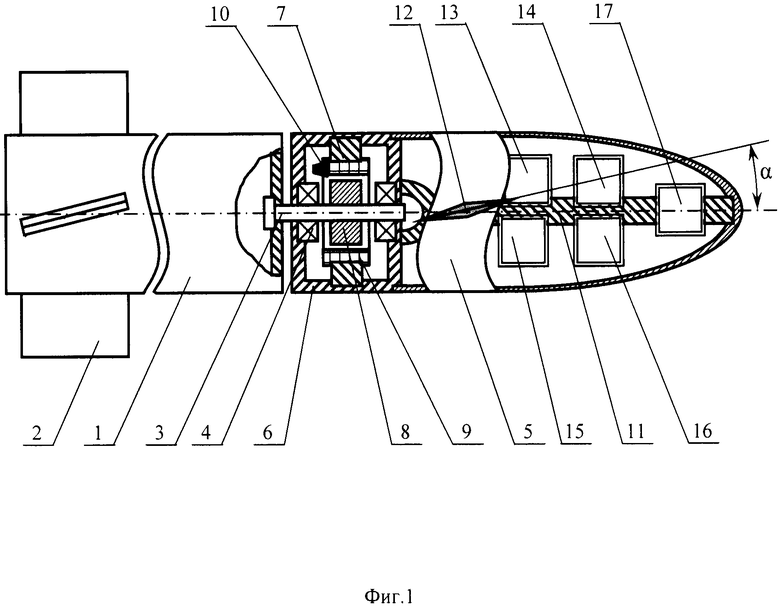
Управляемый реактивный снаряд, включающий управляющий и разгонный блоки, причем управляющий блок выполнен в виде двух модулей: носового с органами управления реактивным снарядом и хвостового, при этом между собой указанные модули соединены посредством цилиндрического шарнира с осью вращения, совпадающей с продольной осью разгонного блока, отличающийся тем, что хвостовой модуль управляющего блока выполнен в виде единого конструктивного целого с разгонным блоком; на оси цилиндрического шарнира (жестко связанной с разгонным блоком) расположен ротор электрического моментного двигателя, статор которого жестко связан с корпусом носового модуля управляющего блока (управляющий модуль); на внешней поверхности носового модуля управляющего блока (управляющего модуля) расположена одна пара аэродинамических рулей, жестко связанных с указанной поверхностью (без возможности поворота относительно указанной поверхности), установленная под фиксированным углом к продольной оси управляющего модуля.
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| US 20040011920 A1, 22.01.2004 | |||
| US 7082878 B2, 01.08.2006. | |||

