Изобретение относится к области вооружения и может быть использовано в комплексах управляемого артиллерийского вооружения.
Способ стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда (Патент RU 2401981 от 20.10.2010) включает измерение одноканальным релейным датчиком угла, связанным с наружной рамкой гироскопического датчика угла и выполненным в виде трех секторов, основного и дополнительного, расположенных по разные стороны от нулевого положения датчика и третьего вспомогательного, расположенного со стороны дополнительного сектора, угла наклона продольной оси снаряда. Осуществляют формирование сигнала управления одним каналом релейного рулевого привода на время превышения углом наклона величин зон нечувствительности секторов датчика. При этом величина зоны нечувствительности основного сектора равна требуемому углу наклона, дополнительного - разности угла наклона и величины амплитуды угла колебаний снаряда по углу атаки, а вспомогательного - величине 2-3 амплитуд угла колебаний снаряда по углу атаки. При превышении углом наклона продольной оси снаряда зон нечувствительности основного или дополнительного секторов формируется сигнал управления рулевым приводом первого канала. При выполнении определенных условий включают режимы управления первым и вторым каналами рулевого привода.
Недостатком данного способа является то, что релейный датчик угла связан с наружной рамкой гироскопического датчика угла, положение которой изменяется (относительно исходного) в полете, в том числе и из-за вращения корпуса снаряда по крену. В итоге это снижает точность стабилизации углового положения продольной оси вращающегося по крену артиллерийского управляемого снаряда.
Этот недостаток, в свою очередь, устранен в изобретении (Патент RU №2158411 от 27.10.2000 г.). Способ поражения цели вращающимся баллистическим реактивным снарядом заключается в полете снаряда к цели со стабилизацией по крену его головного отсека, снабженного головкой самонаведения. При этом головной отсек соединяют с остальными отсеками снаряда через цилиндрический шарнир, а стабилизацию головного отсека по крену осуществляют аэродинамическими и/или газодинамическими рулями этого отсека.
Недостатком данного способа является сложность обеспечения стабилизации головного отсека по крену с помощью двух пар аэродинамических (или иных) рулей, которые одновременно должны обеспечивать необходимые значения углов курса и тангажа.
Технической задачей настоящего изобретения является упрощение алгоритмов функционирования системы управления реактивным снарядом и повышение его боевой эффективности.
Поставленная техническая задача решается следующим образом: способ управления реактивным снарядом, заключающийся в том, что старт или полет его осуществляют со стабилизацией по крену его головного отсека, соединенного с остальными отсеками снаряда через цилиндрический шарнир. При этом стабилизацию головного отсека снаряда по крену осуществляют электрическим моментным двигателем; управляющее воздействие на электрический моментный двигатель формируют блоком управления креном по командам от блока управления полетом на основе информации от блока системы навигации и ориентации об угле поворота по крену (относительно неподвижной системы координат) управляющего модуля; управляющее воздействие на реактивный снаряд формируют одной парой аэродинамических рулей, неподвижно закрепленных на внешней поверхности управляющего модуля под фиксированным углом к продольной оси управляющего модуля; увеличение дальности полета осуществляют при нулевом угле поворота относительно продольной оси управляющего модуля за счет режима подпланирования; управление реактивным снарядом на траектории осуществляют путем изменения направления вектора подъемной силы рулей за счет поворота по крену управляющего модуля на углы, вычисляемые блоком управления полетом.
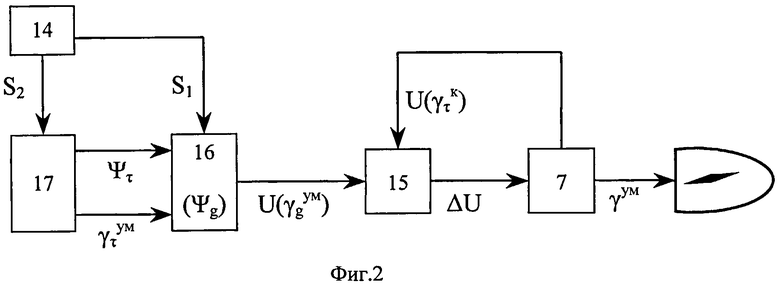
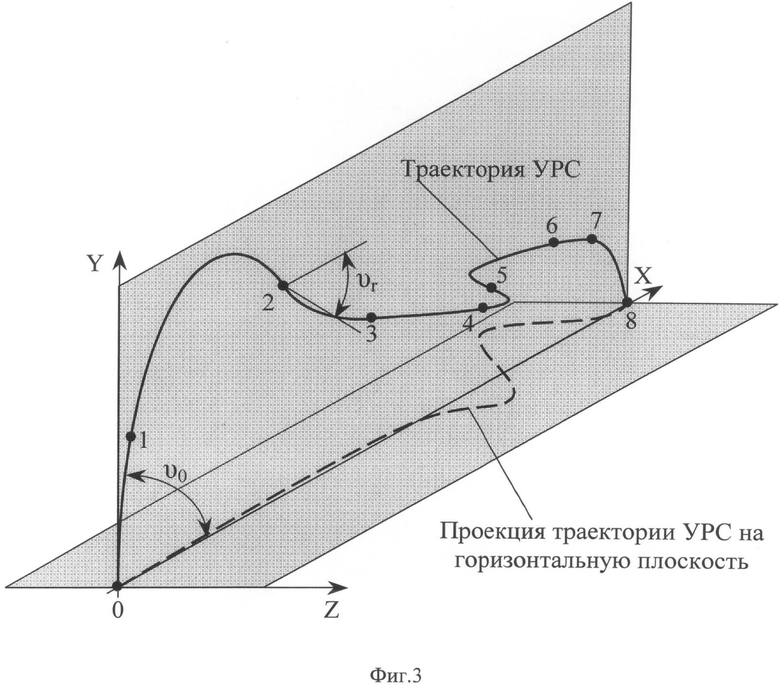
Изобретение поясняется графическим материалом: на фиг.1 представлена конструкция УРС, на фиг.2 - структурная схема, на фиг.3 - вариант траектории полета.
УРС содержит корпус 1 (разгонный блок с боевой частью), на котором расположены косопоставленные стабилизаторы 2. Корпус 1 выполнен в виде единого конструктивного целого с хвостовым модулем управляющего блока, представляющим собой вал 3 цилиндрического шарнира, ось вращения которого совпадает с продольной осью корпуса 1. На валу 3 в подшипниках 4 установлен управляющий модуль 5, являющийся носовым модулем управляющего блока. В корпусе 6 управляющего модуля 5 установлен электрический моментный двигатель 7, включающий в себя:
- ротор 8, жестко связанный с валом 3;
- статор 9, жестко связанный с корпусом 6;
- датчики угла 10, определяющие взаимное положение ротора 8 и статора 9.
К корпусу 6 управляющего модуля 5 жестко крепится шасси 11, на котором, в свою очередь, крепятся:
- одна пара неподвижных относительно управляющего модуля 5 рулей 12, повернутых относительно продольной оси снаряда на фиксированный угол α, величина которого, в зависимости от вида УРС, может лежать в пределах 6°…14°;
- источник питания 13;
- блок загрузки полетной информации 14;
- блок управления креном 15;
- блок управления полетом 16;
- блок системы навигации и ориентации 17, продольная ось которого совпадает с продольной осью снаряда, содержащей блок микромеханических чувствительных элементов (инерциальный модуль) и спутниковую навигационную систему.
Ключевой особенностью предлагаемого способа является создание неизменного по величине вектора управляющей силы, жестко связанной с корпусом управляющего модуля 5 (например - подъемной силы аэродинамических рулей). При этом управляющий модуль 5 «развязан по крену» относительно корпуса 1 УРС. Поэтому при повороте управляющего модуля 5 относительно Земли, например с помощью электрического моментного двигателя 7, с «опорой» на корпус 1 УРС, меняется направление вектора управляющей силы относительно осей системы координат, связанной с Землей. Что, в свою очередь, приводит к изменению траектории УРС.
Вращение корпуса 1 УРС по крену не имеет принципиального значения. То есть корпус может вращаться с большой частотой, сообщаемой ему при выходе с направляющих пусковой установки, либо вращаться под действием случайных моментов, если начальная частота вращения не была обусловлена его пуском. Важно, чтобы он играл роль «опоры» для поворота управляющего модуля 5.
На фиг.2 показано:
- S1 и S2 - пакеты стартовой информации;
- ψτ - текущие параметры траектории полета УРС;
- 
ψg - параметры желаемой траектории полета УРС;
- 
- 
- 
- 
- ΔU - напряжение, подающееся на статор 9 электрического моментного двигателя 7;
- γум - угол поворота управляющего модуля 5 относительно системы координат, связанной с Землей.
На фиг.3 обозначено:
- система координат, связанная с Землей.
- траектория УРС (сплошная линия) и ее проекция на горизонтальную плоскость (пунктирная линия);
- 0 - точка старта УРС;
- υ0 - угол поворота направляющих (пускового контейнера) по высоте;
- 0-1 участок разгона (работы двигательной установки УРС);
- 1-2 пассивный участок траектории;
- 2 - точка раскрытия рулей;
- υr=0…-15° угол тангажа УРС в момент раскрытия рулей;
- 2-7 участок подпланирования УРС;
- 3-7 участок горизонтального маневра УРС при «естественной» потере высоты;
- 3 и 5 - точки горизонтального маневра при γум=0…+90°;
- 4 и 6 - точки горизонтального маневра при γум=0…-90°;
- 7-8 участок вертикализации УРС;
- 7 - точка вертикального маневра при γум=180°;
- 8 - точка цели.
При подготовке к пуску с помощью блока загрузки полетной информации 14 на борт УРС передаются следующие пакеты стартовой информации:
- в блок управления полетом 16 - S1(X0, Y0, Z0, υ0, ψ0, Хц, Yц, Zц), где: X0, Y0, Z0 - координаты точки старта; υ0 и ψ0 - углы поворота направляющих (пускового контейнера) по высоте и азимуту; Хц, Yц, Zц - координаты цели;
- в блок системы навигации и ориентации 17 - S2(υ0, ψ0, A), где A - альманах спутников.
Блок управления полетом 16 производит вычисление параметров ψg[Xg(t), Yg(t), Zg(t), υg(t), ψg(t)] желаемой траектории полета УРС как функций времени полета t, а так же определяет координаты точек 2 - раскрытия рулей и 7 - начала вертикализации УРС.
После команды «пуск», блок системы навигации и ориентации 17 начинает определять и передавать в блок управления полетом 16 следующую информацию:
- текущие координаты УРС - ψτ(Xτ, Yτ, Zτ, υτ, ψτ);
- текущее значение угла крена управляющего модуля 5 относительно системы координат, связанной с Землей - 
Причем инерциальный модуль, входящий в состав блока системы навигации и ориентации 17, начинает свою работу с момента старта УРС. А спутниковая навигационная система запускается, с учетом загруженного альманаха спутников, в режиме «горячего старта» после окончания работы двигателя УРС (то есть в точке 1). До момента раскрытия рулей (то есть до точки 2) спутниковая навигационная система выходит на рабочий режим и начинает работать в комплексе с инерциальным модулем.
Блок управления полетом 16 осуществляет сравнение текущих ψτ и желаемых ψg параметров траектории УРС в конкретный момент времени. После раскрытия рулей (точка 2), указанный блок, с учетом текущего значения угла крена управляющего модуля 5 

и формирует командное напряжение 
В соответствии с командным напряжением 


на статор 9 электрического моментного двигателя 7, что приводит к повороту управляющего модуля 5 на необходимый угол γум относительно системы координат, связанной с Землей.
Это меняет направление вектора подъемной силы рулей относительно осей системы координат, связанной с Землей, что приводит к изменению траектории УРС.
Таким образом, при повороте управляющего модуля относительно его продольной оси на углы, лежащие в пределах 0°…±90°, происходит управление УРС по курсу (точки 3, 4, 5 и 6), а при повороте на угол 180° - по высоте (точка 7), вплоть до вертикализации УРС.
Данное техническое решение позволяет:
- упростить алгоритм функционирования системы управления реактивным снарядом за счет уменьшения числа управляющих органов;
- повысить боевую эффективность УРС путем повышения дальности его полета за счет реализации режима подпланирования и за счет его вертикализации в районе цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 2012 |
|
RU2502042C1 |
| Система коррекции траектории вращающегося артиллерийского снаряда | 2024 |
|
RU2838369C1 |
| Взрыватель корректирующий для вращающегося снаряда и способ его применения | 2019 |
|
RU2725331C1 |
| АВТОНОМНЫЙ БЛОК УПРАВЛЕНИЯ РЕАКТИВНОГО СНАРЯДА | 2016 |
|
RU2627334C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| КРУГЛОСУТОЧНАЯ ВСЕПОГОДНАЯ ВЫСОКОТОЧНАЯ КОРРЕКТИРУЕМАЯ АВИАБОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С АВТОМАТОМ ГЛОБАЛЬНОЙ СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2317515C1 |
Изобретение относится к области вооружения и может быть использовано в комплексах управляемого артиллерийского вооружения. Способ заключается в том, что старт или полет реактивного снаряда осуществляют со стабилизацией по крену его головного отсека, соединенного с остальными отсеками снаряда через цилиндрический шарнир. При этом стабилизацию головного отсека снаряда по крену осуществляют электрическим моментным двигателем; управляющее воздействие на электрический моментный двигатель формируют блоком управления креном по командам от блока управления полетом на основе информации от блока системы навигации и ориентации об угле поворота по крену (относительно неподвижной системы координат) управляющего модуля. Управляющее воздействие на реактивный снаряд формируют одной парой аэродинамических рулей, неподвижно закрепленных на внешней поверхности управляющего модуля под фиксированным углом к продольной оси управляющего модуля. Увеличение дальности полета осуществляют при нулевом угле поворота относительно продольной оси управляющего модуля за счет режима подпланирования. Управление реактивным снарядом на траектории осуществляют путем изменения направления вектора подъемной силы рулей за счет поворота по крену управляющего модуля на углы, вычисляемые блоком управления полетом. Технический результат заключается в упрощении алгоритма функционирования системы управления реактивным снарядом, а также повышении боевой эффективности реактивного снаряда. 3 ил.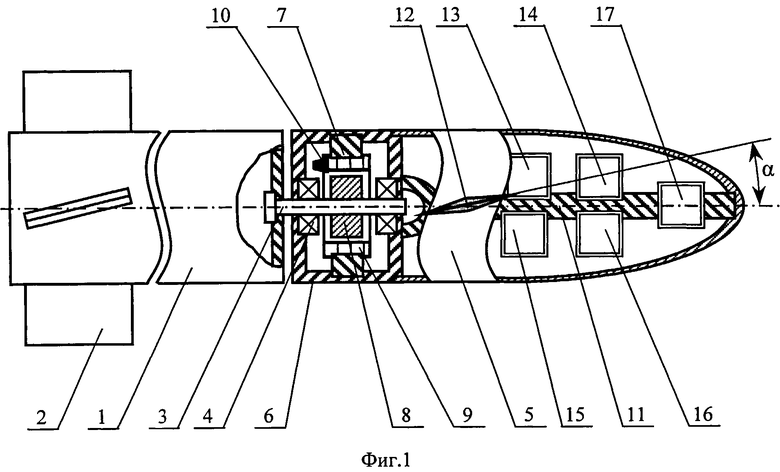
Способ управления реактивным снарядом, заключающийся в том, что старт или полет его осуществляют со стабилизацией по крену его головного отсека, соединенного с остальными отсеками снаряда через цилиндрический шарнир, отличающийся тем, что стабилизацию головного отсека снаряда по крену осуществляют электрическим моментным двигателем; управляющее воздействие на электрический моментный двигатель формируют блоком управления креном по командам от блока управления полетом на основе информации от блока системы навигации и ориентации об угле поворота по крену (относительно неподвижной системы координат) управляющего модуля; управляющее воздействие на реактивный снаряд формируют одной парой аэродинамических рулей, неподвижно закрепленных на внешней поверхности управляющего модуля под фиксированным углом к продольной оси управляющего модуля; увеличение дальности полета осуществляют при нулевом угле поворота относительно продольной оси управляющего модуля за счет режима подпланирования; управление реактивным снарядом на траектории осуществляют путем изменения направления вектора подъемной силы рулей за счет поворота по крену управляющего модуля на углы, вычисляемые блоком управления полетом.
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ПРОДОЛЬНОЙ ОСИ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2401981C2 |
| Устройство для срезания заусенец на резиновых изделиях | 1957 |
|
SU111626A1 |
| УСТРОЙСТВО ЗАЩИТЫ ГЕНЕРАТОРА ОЗОНА ОТ ПОЖАРА | 2016 |
|
RU2634012C1 |

