Изобретение относится к военной технике, преимущественно, к тактическим системам ракетного оружия (РО) "поверхность - поверхность" и "воздух - поверхность".
Известны способы поражения баллистическими реактивными снарядами (PC) "поверхность - поверхность" неподвижных целей типа "район сосредоточения войск и техники противника", "командный пункт", "опорный пункт обороны" и т.п.
Известны также способы поражения подвижных и малоразмерных целей типа "корабль", "танк", "мост" и т.п. PC "воздух - поверхность" (см., например, Е. Б. Волков, Г. Ю. Мазинг, В.Н. Сокольский "Твердотопливные ракеты", М., "Машиностроение", 1992, стр. 275-280 - аналоги). При этом с целью улучшения кучности PC предпринимаются попытки создания кассетных боевых частей, боевых блоков(субснарядов) с головками самонаведения (ГСН), отделяемых от PC в зоне цели, и т.д. Следует отметить, что "экологическая ниша" относительно простых и дешевых баллистических PC, стабилизируемых в полете вращением (проворотом относительно оси PC) и поэтому не нуждающихся в бортовых системах навигации и автопилотирования (в отличие, например, от крылатых ракет), с базированием на относительно легкие многозарядные пусковые установки (в отличие, например, от управляемых и неуправляемых снарядов ствольной артиллерии, где пусковой установкой является орудие), в существующих структурах средств огневого поражения предполагает либо т.н. "шквальный" налет "по площадям", либо поражение типовых целей (например, бронетанковой техники) рассеиваемыми кассетными элементами на линии вторых эшелонов до момента развертывания в боевые порядки.
Ближайшим аналогом предлагаемого технического решения является способ поражения цели вращающимся баллистическим реактивным снарядом М-21 ОФ (см. B. C. Князьков, "Боевая техника", М., ДОСААФ, 1986, стр. 94-100, рис. 16б). Однако вышеперечисленные способы поражения цели вращающимися баллистическими PC обладают низкой эффективностью при обстреле подвижных (малоразмерных) объектов на большом удалении (за линией прямого выстрела); с другой стороны, боевые блоки с ГСН, отделяемые от головного отсека (ГО) PC - носителя в зоне цели, не используют поражающих возможностей скоростного PC, требуют дополнительных систем разделения и управления полетом блока.
Целью предлагаемого изобретения является расширение области боевого применения существующих и вновь разрабатываемых баллистических вращающихся PC вплоть до высокоточного поражения движущихся и малоразмерных целей при сохранении относительной простоты бортового оборудования и пусковых установок.
Указанная цель достигается тем, что старт и полет PC осуществляют со стабилизацией по крену его головного отсека, снабженного головкой самонаведения и соединенного с остальными отсеками снаряда через цилиндрический шарнир. Стабилизацию головного отсека снаряда по крену осуществляют аэродинамическими и/или газодинамическими рулями этого отсека. При этом старт снаряда с головным отсеком, оснащенным радиолокационной головкой самонаведения, производят под углом к горизонту не более 35 градусов.
Пример устройства (PC), реализующего работу (функционирование) по данному способу, представлен на фиг. 1. Приняты обозначения:
1 - головной отсек;
2 - разгонный блок (например, на базе твердотопливного реактивного снаряда залпового огня);
3 - цилиндрический шарнир (показан вариант на базе радиально-упорных подшипников качения);
4 - головка самонаведения;
5 - аэродинамические рули (и/или газодинамические органы управления PC);
6 - стабилизатор (показан вариант оперенного PC);
7 - бортовая аппаратура (например, гировертикаль, бортовой вычислитель, ампульная батарея, блок силовых коммутаций и т.п.) и приводы управления;
8 - обтекатель ГСН;
9 - устройство крепления ГО на носовую часть PC.
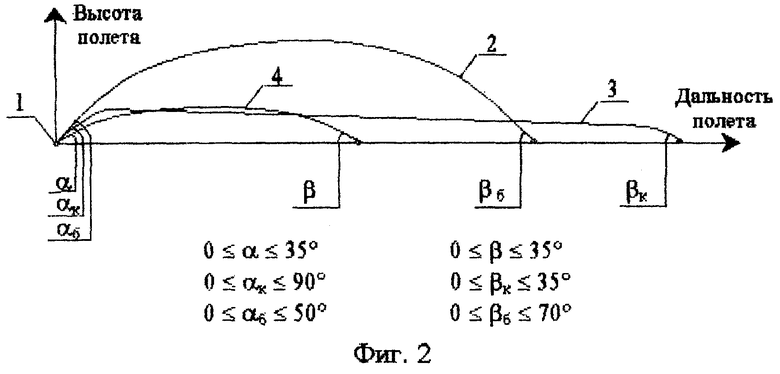
Типовая траектория полета PC при реализации предлагаемого технического решения показана на фиг. 2. Здесь
1 - точка пуска;
2 - оптимальная по дальности баллистическая траектория PC;
3 - траектория полета крылатой ракеты;
4 - траектория полета PC, оснащенного ГО с радиолокационной ГСН;
αб, αк, α - соответствующие (для поз. 2, 3,4) углы старта;
βб, βк, β - соответствующие (для поз. 2, 3, 4) углы визирования цели в зоне самонаведения.
Траектории поз. 2, 3, 4 приведены для PC с равными массовыми и энергетическими характеристиками.
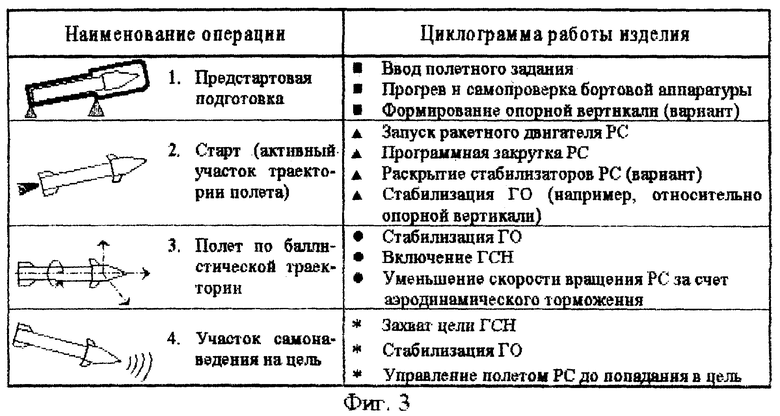
Типовая циклограмма работы PC, реализующего предложенный способ наведения на цель, представлена на фиг. 3.
В качестве примера рассмотрим вариант применения данного технического предложения для поражения цели типа "корабль". Боекомплект PC размещается на корабле-носителе в пусковых установках с углом возвышения α(αб), обеспечивающим баллистический полет снаряда на дальность автономного радиолокационного (оптического) целеуказания носителя. Перед атакой цели производится предстартовая подготовка PC (см. фиг. 3), корабль-носитель доворачивает на боевой курс (в случае неподвижных пусковых устройств) до попадания цели в плоскость стрельбы.
Пуск PC производится автоматически в зоне разрешенных (по условиям качки) углов α(αб), при этом допускается оптимизация траектории по α(αб). Согласно временной уставке полетного задания начинается работа ГСН (со старта либо в заданной точке траектории полета PC). Стабилизация ГО по каналу крена обеспечивает штатную работу ГСН аналогично алгоритму функционирования, принятому на невращающихся PC. Следует отметить, что наличие устройства крепления ГО на носовую часть PC (фиг. 1, поз. 9) позволяет использовать в качестве разгонных блоков штатные неуправляемые реактивные снаряды (неуправляемые ракеты) с их штатными боевыми частями, например снаряды систем залпового огня, в случае соответствия связки "PC плюс ГО" требованиям заданной аэродинамической и гироскопической устойчивости (определяется на этапе отработки комплекса). Данное положение справедливо как для калиберных, так и для разнокалиберных PC и ГО, что, в принципе, позволяет создавать различные комбинации (модификации) РО, используя в качестве стыкуемых модулей имеющийся в наличии арсенал радиолокационных (оптических, комбинированных) головок самонаведения (головных частей) и неуправляемых реактивных снарядов (ракет).
Известно, что радиолокационная (РЛ) головка самонаведения (РЛ ГСН) воспринимает радиоволны, излучаемые или отраженные целью (соответственно, пассивный или активный (полуактивный) режимы пеленгации), определяет направление на цель и дальность до цели (в активном режиме). Современный уровень совершенства РЛ ГСН, функционирующих в активном (полуактивном) режиме, позволяет с высоким уровнем достоверности выделять малоподвижные РЛ - контрастные цели на относительно простых фонах, например, корабли на фоне морской поверхности. При этом более пологому относительно горизонта углу визирования соответствуют меньшие фоновые засветки от подстилающей морской поверхности, что улучшает соотношение "сигнал - шум". Следует отметить, что для относительно малоразмерных (по апертуре антенны) РЛ ГСН, функционирующих исключительно в реальном масштабе времени, уровень естественных (и искусственных) помех является определяющим фактором их штатной работоспособности. Комплексное исследование зависимости "угол визирования" - "сигнал/шум" для РЛ ГСН сантиметрового, миллиметрового и дециметрового диапазонов длин волн позволяет прогнозировать:
- надежную работу (в частности, по морским надводным целям) существующих РЛ ГСН в диапазоне углов визирования 0 - 25 град.;
- улучшение в ближайшие 20 - 25 лет параметров зондирующих РЛ-сигналов и алгоритмов обработки полученной информации, что позволит обеспечить надежную работу РЛ ГСН в диапазоне углов визирования до 35 град. к горизонту.
Поскольку в "идеальном" случае PC должен попасть в цель практически без коррекции траектории (отсутствует устаревание информации целеуказания, параметры упреждения для крайне "инерционной" цели типа "корабль" рассчитываются с высоким уровнем достоверности, время полета PC невелико), требования к маневренным характеристикам управляемого снаряда могут быть весьма невысокими. Вкупе с отсутствием дорогостоящих и сложных в эксплуатации бортовых систем инерциальной навигации (PC "идет" по баллистической кривой "как по рельсам", что позволяет надежно прогнозировать параметры движения снаряда в любой точке траектории и в любой момент времени) и возможностями модульного построения из УЖЕ ИЗГОТОВЛЕННЫХ изделий военной техники, стоимость комплексов РО, реализующих предложенный способ поражения целей, оценивается на уровне ДОЛЕЙ ПРОЦЕНТА от полномасштабной разработки специализированных комплексов РО с близким уровнем характеристик.
Таким образом, создание высокоточного ракетного комплекса "поверхность - поверхность", ("воздух - поверхность") на полный радиус автономного целеуказания носителя РО, например, на базе систем залпового огня, позволит, как минимум, успешно конкурировать с управляемыми снарядами ствольных артсистем при поражении наземных целей, с торпедным оружием для поражения надводных целей; как максимум, комплексы РО по предлагаемому техническому решению могут составить наиболее многочисленный класс многоцелевого высокоточного оружия в первой половине XXI века.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ СВЕРХЗВУКОВОЙ КРЫЛАТОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569971C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473867C1 |
| УПРАВЛЯЮЩИЙ БЛОК РЕАКТИВНОГО СНАРЯДА | 2012 |
|
RU2505777C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления | 2015 |
|
RU2613016C1 |
Изобретение относится к тактическому ракетному оружию. Способ поражения цели вращающимся баллистическим реактивным снарядом заключается в полете снаряда к цели со стабилизацией по крену его головного отсека, снабженного головкой самонаведения. При этом головной отсек соединяют с остальными отсеками снаряда через цилиндрический шарнир, а стабилизацию головного отсека по крену осуществляют аэродинамическими и/или газодинамическими рулями этого отсека. Изобретение обеспечивает высокоточное поражение малоразмерных и движущихся целей. 2 з.п. ф-лы, 3 ил.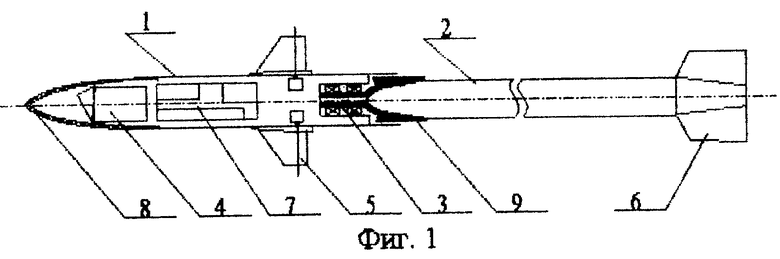
| КНЯЗЬКОВ В.С | |||
| Боевая техника | |||
| - М.: ДОСААФ, 1986, с.94-100, рис.16б, снаряд М-210Ф | |||
| КОРРЕКТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, СТАБИЛИЗИРОВАННЫЙ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 1993 |
|
RU2044255C1 |
| RU 2058011 C1, 10.04.1996 | |||
| УПРАВЛЯЕМАЯ РАКЕТА | 1995 |
|
RU2103655C1 |
| CB 1398443, 18.06.1975 | |||
| US 4796534, 16.01.1989 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ КОСМИЧЕСКОГО АППАРАТА ДЛЯ ВОССТАНОВЛЕНИЯ ОЗОНОВОГО СЛОЯ ЗЕМЛИ | 1994 |
|
RU2090494C1 |
| Устройство для контроля температуры вырабатываемой стеклонити | 1986 |
|
SU1428720A1 |

