ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
[0001] Приоритет по данному изобретению имеет патентная заявка США № 61/174786, зарегистрированная 1 мая 2009 г., полностью включенная в данный документ в виде ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] При проведении геофизической разведки источник сейсмических колебаний можно перевозить на грузовике и устанавливать на заданном месте на площади проведения разведки. Источник сейсмических колебаний может представлять собой вибрационный источник с управлением по одной оси и может передавать в землю продольные волны сжатия при работе в контакте с земной поверхностью.
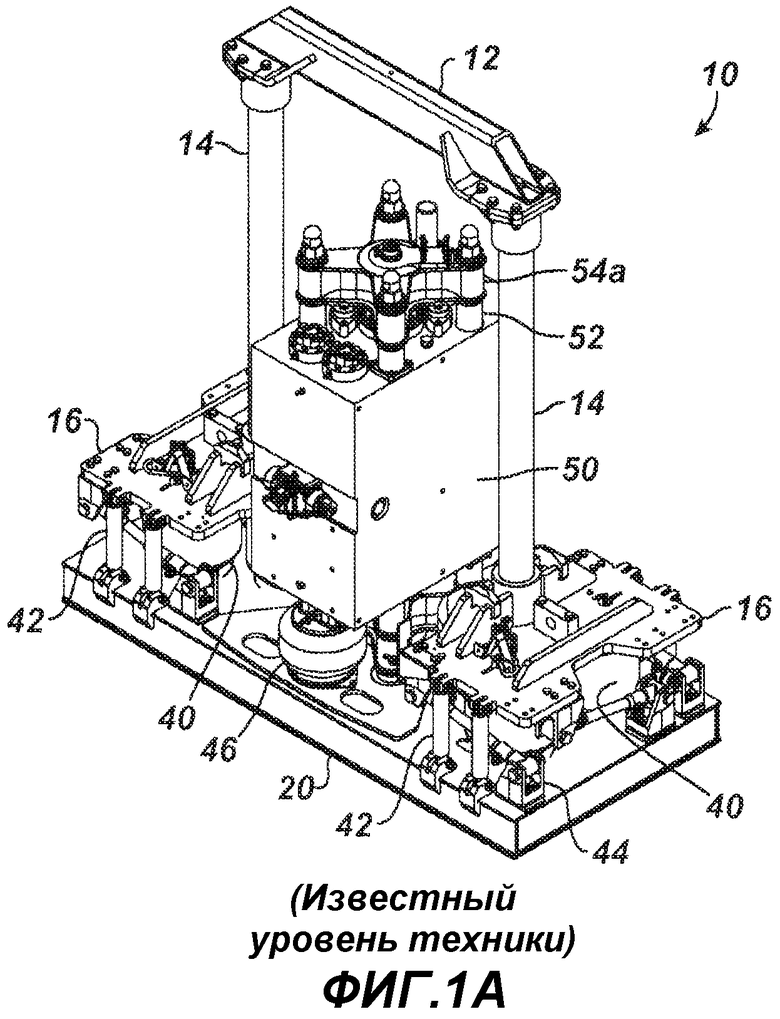
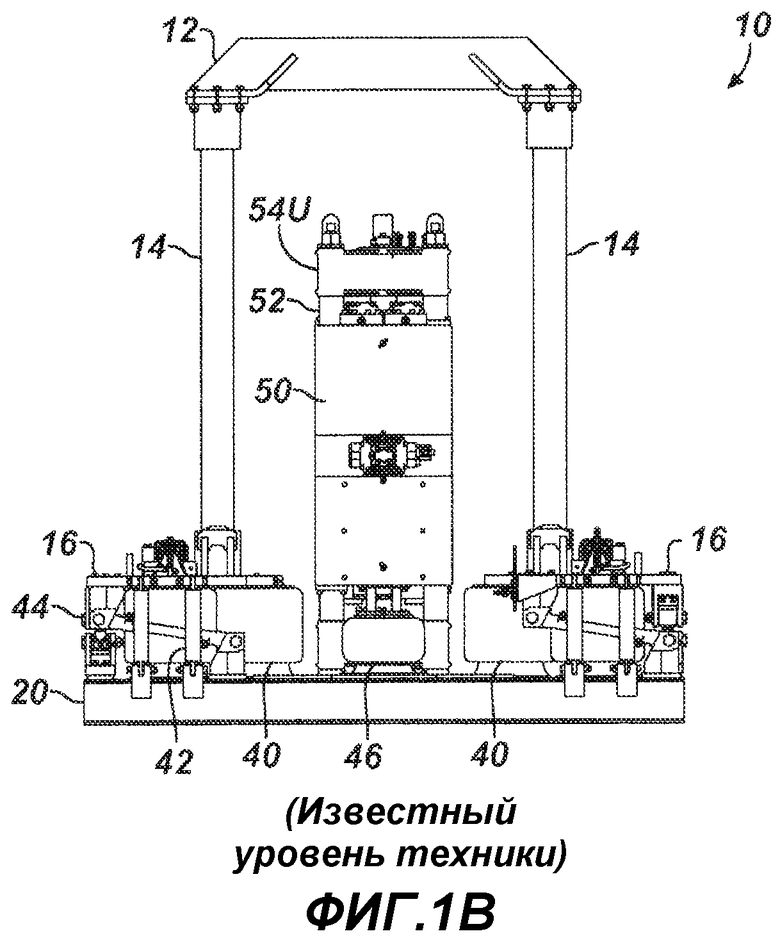
[0003] Вибратор 10 известного уровня техники показан на фиг.1A-1C и схематично показан на фиг.2. Вибратор 10 передает толкающее усилие на грунт с использованием излучающей плиты 20 и реактивной массы 50. Обычно, вибратор 10 устанавливают на транспортном средстве (не показано), использующем механизм и стержни 12/14 для спуска вибратора 10 на грунт. Когда вибратор 10 спущен, вес транспортного средства удерживает излучающую плиту 20 в контакте с грунтом, обеспечивая передачу в землю сигналов источника сейсмических колебаний.
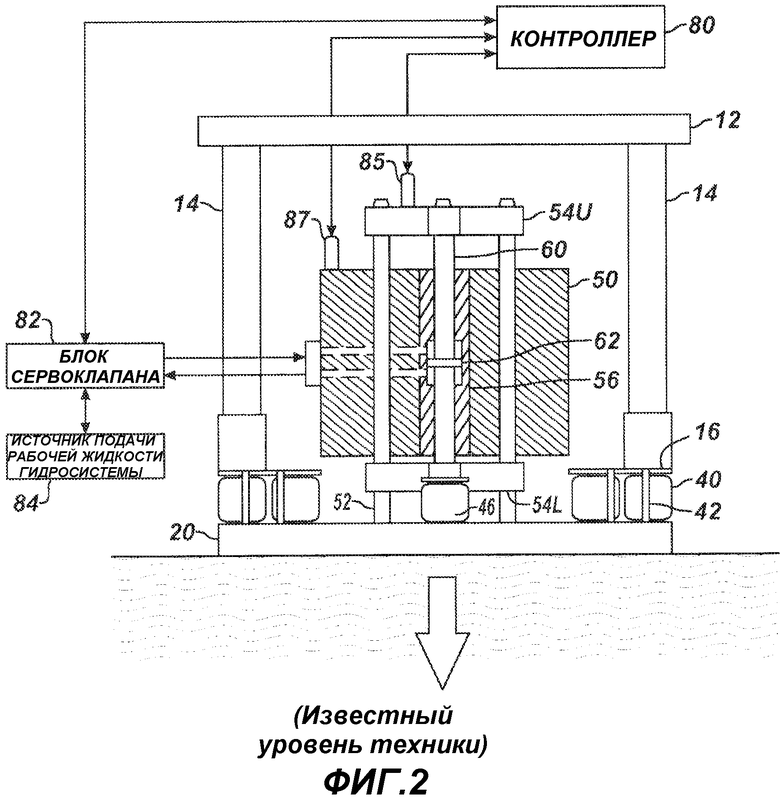
[0004] Реактивная масса 50 установлена непосредственно над излучающей плитой 20, и стойки 52 (на фиг.2) проходят от излучающей плиты 20 и через массу 50 для ее стабилизации. Реактивная масса 50 имеет выполненный внутри цилиндр 56. Вертикально выдвигающийся поршень 60 проходит через данный цилиндр 56, и головка 62 на поршне 60 делит цилиндр 56 на верхнюю и нижнюю камеры. Поршень 60 соединен нижним концом с опорной втулкой в нижней крестовине 54L и проходит вверх через цилиндр 56. Верхний конец поршня 60 соединен с опорной втулкой на верхней крестовине 54U, и крестовины 54U-L соединены со стойками 52.
[0005] Для виброизоляции излучающей плиты 20 от стержней 14 стержни 14 имеют основания 16 с виброизолирующими опорами 40, расположенными между основаниями 16 и излучающей плитой 20. Как показано, три виброизолирующих опоры 40 расположены под каждым основанием 16. Кроме того, основания 16 имеют элементы 42, работающие на растяжение, соединяющие между собой края основания 16 и излучающей плиты 20. Элементы 42, работающие на растяжение, используют для удержания излучающей плиты 20 при подъеме вибратора 10 и его спуске на грунт. Наконец, амортизаторы 44 также установлены между нижней поверхностью основания 16 и излучающей плитой 20 для изоляции колебаний между ними.
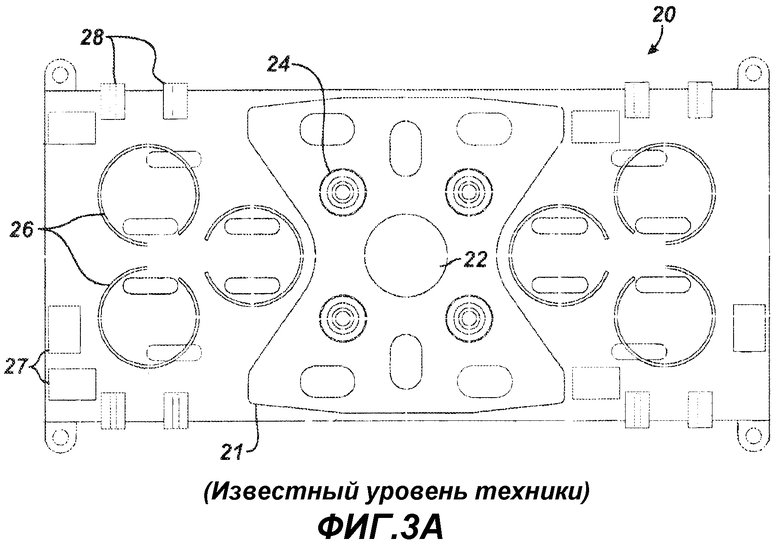
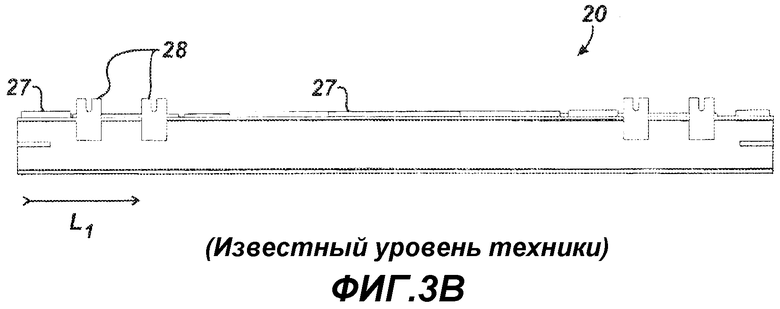
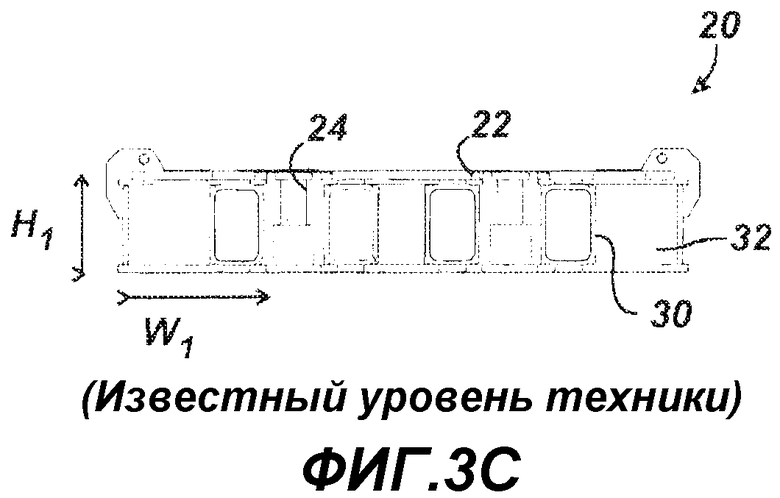
[0006] На фиг.3A-3C показана излучающая плита 20 для вибратора 10 известного уровня техники в плане, на виде сбоку и на торцевых видах и видах сечения. Верхняя поверхность плиты 20 имеет крепежные детали 24 для стоек (52, фиг.2), и усиливающая платформа 21 окружает данные крепежные детали 24. Удерживающие бурты 26 оборудованы для виброизолирующих опор 40. Длинные края вблизи углов имеют вилкообразные проушины 28, с которыми соединяются концы элементов 42, работающих на растяжение, и усиливающие платформы 27 созданы вокруг внешних краев плиты 20 для соединения амортизаторов 44 с излучающей плитой 20.
[0007] По габаритам излучающая плита 20 может иметь высоту H1 около 6,9 дюймов (18 см), ширину W1 около 42 дюймов (107 см) и длину L1 около 96 дюймов (244 см), и плита 20 может весить приблизительно 4020 фунтов (1825 кг). Как показано в концевом сечении на фиг.3C, плита 20 имеет четыре внутренних трубы или балки 30, проходящие продольно по длине плиты. Балки 30 представляют собой трубы прямоугольного сечения и имеют высоту около 6 дюймов (15 см), ширину около 4 дюймов (10 см) и толщину стенки около 3/8 дюйма (1 см). Соединительные перегородки 32 установлены между балками 30 и между продольными боковыми стенками излучающей плиты 20.
[0008] Во время работы контроллер 80, как показано на фиг.2, принимает сигналы от первого датчика 85, соединенного с верхней крестовиной 54U, и принимает сигналы от второго датчика 87, соединенного с реактивной массой 50. На основе обратной связи с данными датчиками 85/87 и необходимого свип-сигнала для работы вибратора 10 контроллер 80 генерирует управляющий сигнал для управления блоком 82 сервоклапана. Приводимый в действие управляющим сигналом блок 82 сервоклапана поочередно направляет рабочую жидкость гидросистемы высокого давления из источника 84 подачи рабочей жидкости гидросистемы в верхнюю и нижнюю камеры цилиндра поршня через окна в массе 50. При поочередном накоплении рабочей жидкости гидросистемы в поршневых камерах, размещенных над поршневой головкой 62 и под ней, реактивная масса 50 возвратно-поступательно вибрирует в вертикальном направлении на поршне 60. В свою очередь, усилие, генерируемое колеблющейся массой 50, передается на излучающую плиту 20 через стойки 52 и поршень 60, так что излучающая плита 20 вибрирует с необходимой амплитудой и частотой или свипированием для генерирования сигнала источника сейсмических колебаний в грунт.
[0009] При действии перемещающейся реактивной массы 50 на излучающую плиту 20 для передачи сигнала источника сейсмических колебаний в землю сигнал проходит через землю, отражается на границах раздела и горизонтах и затем проходит к поверхности земли. На поверхности расстановка сейсмоприемников (не показано), соединенных с землей, обнаруживает отраженный сигнал, и регистрирующее устройство записывает сигналы от сейсмоприемников. Сейсмическое регистрирующее устройство может использовать корреляционный процессор для коррелирования вычисленного толкающего усилия, передаваемого источником сейсмических колебаний на грунт, с сейсмическими сигналами, принимаемыми сейсмоприемниками. Источник сейсмических колебаний имеет подсистему гидравлического насоса с гидравлическими линиями, подающую рабочую жидкость гидросистемы к блоку 82 сервоклапана, и может также присутствовать охладитель гидравлической подсистемы.
[0010] При работе таким известного уровня техники вибратором 10 операторы испытывают проблемы в точном определении толкающего усилия, прикладываемого вибратором 10 к грунту, и в точном коррелировании работы вибратора с генерируемым сигналом источника. В идеале, операторам необходимо знать фактическое толкающее усилие, прикладываемое излучающей плитой 20 на грунт при передаче сейсмической энергии. К сожалению, излучающая плита 20 испытывает значительные вибрацию и изгиб, искажающие и отсчеты, которые можно получать от излучающей плиты 20. Кроме того, виброизолирующие опоры 40, амортизаторы 44 и другие компоненты, требуемые для изоляции излучающей плиты 20 от стоек 14 и оснований 16, ограничивают свободное и незанятое пространство, имеющееся на плите 20 основания, для получения отсчетов ускорения.
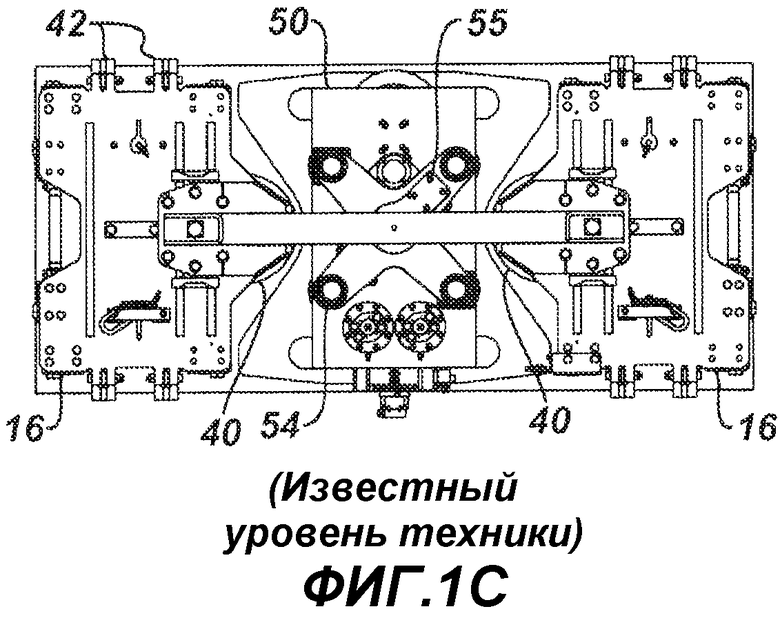
[0011] По данным причинам локальный датчик (например, акселерометр или сейсмоприемник) обычно устанавливают на верхней крестовине 54U вибратора 10, находящейся над реактивной массой 50, как лучше всего показано на фиг.1C. Прикрепленный на месте 55 на верхней крестовине 54U акселерометр (85, фиг.2) соединяется с излучающей плитой 20 через стойки 52. В данном месте на верхней крестовине 54U акселерометр 85 может избежать изгиба, нежелательного шума, искажений и т.п., возникающих на плите 20 основания, и при этом измерять ускорение для излучающей плиты 20. По данной причине типичная работа в известном уровне техники по улучшению показателей работы такого вибратора 10 фокусируется на оптимизации размещения локального датчика 85 на верхней крестовине 54U для устранения проблем шума, изгиба и других.
[0012] При работе контроллер 80, показанный на фиг.2, измеряет сигнал, передаваемый в землю, с использованием локального датчика 85, размещенного на верхней крестовине 54U, и датчика 87, размещенного на реактивной массе 50. Измеренные сигналы передаются на корреляционный процессор, также принимающий сигналы от сейсмоприемников или других датчиков, составляющих расстановку сейсмографов. Корреляционный процессор использует различные алгоритмы для распознавания волнового сигнала данных из искажений и других сигналов помех. Проблема данного способа состоит в том, что искажение исходного сигнала источника может изменяться, делая корреляцию затруднительной. Таким образом, чем чище сигнал источника, переданный в землю, тем проще корреляция в конце записи процесса сбора и обработки сейсмических данных. Также, чем точнее сигнал источника, тем больше энергии вибратор 10, являющийся источником, может передавать в землю.
[0013] Поскольку вибратор 10 работает на поверхности земли, которая может значительно отличаться от площадки к площадке вследствие присутствия песка, скального грунта, растительного слоя и т.д., излучающая плита 20 часто неравномерно опирается при развертывании на грунте на данном месте. Кроме того, излучающая плита 20 должна изгибаться и напрямую воздействовать на систему управления во время работы. В результате, производимая излучаемая энергия может изменяться от площадки к площадке в зависимости от места развертывания вибратора 10. Поэтому, сигнатура вибратора, как источника, является не одинаковой (или почти такой же) от площадки к площадке и не характеристически повторяющейся, что необходимо при выполнении сейсмического анализа.
[0014] Когда расчетные сигналы толкающего усилия на вибраторе 10 кросс-коррелируют с сигналами дальней зоны поля, измеренными в поле, в технике считают, что размещение акселерометра на плите основания может обуславливать погрешности во времени вступления сейсмических волн. Один теоретический подход, в известном уровне техники, для уменьшения временного сдвига, обусловленного фазовым запаздыванием в колебаниях излучающей плиты 20 относительно силы приведения в действие от поршня 60, предлагает размещение акселерометра на плите основания на радиусе, составляющем приблизительно 68% полного радиуса плиты. См. A. Lebedev и I. Beresnev, "Radiation from flexural vibrations of the baseplate and their effect on accuracy of the traveltime measurements", Geophysical Prospecting, 2005, 53, 543-555. Также считается практически сложным нахождение точного местоположения на плите основания для акселерометра для улучшения временных сдвигов, так что более практичным решением должно являться модифицирование резонанса излучающей плиты 20 так, что проблематичные моды данного резонанса должны лежать выше верхней частоты свип-сигнала, используемого во время сейсмической разведки. Хотя данный подход может являться эффективным, объект настоящего изобретения направлен на преодоление или, по меньшей мере, уменьшение эффектов одной или нескольких проблем, изложенных выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0015] Сейсмический вибратор имеет излучающую плиту с верхней поверхностью и нижней поверхностью. Рама поддерживает излучающую плиту так, что нижняя поверхность может соединяться с грунтом для передачи энергии вибрации для проведения сейсмической разведки. Исполнительный механизм перемещает массу, установленную с возможностью перемещения над излучающей плитой, для передачи энергии вибрации на излучающую плиту. Данный исполнительный механизм может включать в себя гидравлический исполнительный механизм с блоком сервоклапана, управляющим подачей рабочей жидкости гидросистемы к поршню, на котором установлена масса. Альтернативно, исполнительный механизм может включать в себя электродвигатель, такой как линейный электродвигатель. С использованием гидравлического исполнительного механизма, например, стойки, прикрепленные к излучающей плите, проходят через массу и поддерживают массу на излучающей плите. Первая крестовина поддерживает один конец поршня на стойках, а вторая крестовина поддерживает другой конец поршня на стойках.
[0016] Верхняя поверхность излучающей плиты имеет площади, свободные от компонентов соединения рамы и стоек с излучающей плитой. Конкретно, излучающая плита имеет, по меньшей мере, четыре виброизолирующие опоры, изолирующие раму от излучающей плиты. Каждая из данных виброизолирующих опор установлена на полках по углам излучающей плиты. Данные полки установлены смещенными от контактной площади излучающей плиты так, что виброизолирующие опоры оставляют свободной верхнюю поверхность излучающей плиты.
[0017] Первый датчик, такой как акселерометр, установлен непосредственно на излучающей плите и обнаруживает первые сигналы, показывающие ускорение, передаваемое на излучающую плиту. Аналогично, второй датчик установлен на массе и обнаруживает вторые сигналы, показывающие ускорение массы. Вторые сигналы от второго датчика обычно являются достоверными и точно отражают ускорение массы в соответствие с габаритом, значением массы и размером массы, на которой установлен второй датчик.
[0018] Излучающая плита, вместе с тем, обычно испытывает большой изгиб и прогиб, когда соединена с грунтом и передает вибрацию на грунт. По данной причине излучающая плита предпочтительно имеет увеличенную жесткость. Например, жесткость излучающей плиты может быть приблизительно в 2,5 раза больше жесткости излучающей плиты сравнимого по расчетным характеристикам вибратора известного уровня техники. При этом масса излучающей плиты может быть приблизительно одинаковой с массой излучающей плиты, используемой в сравнимом по расчетным характеристикам вибраторе известного уровня техники. Увеличение в жесткости при сравнимой массе получают увеличением высоты продольных балок в излучающей плите и уменьшением толщины их стенок для уменьшения веса.
[0019] Увеличенная жесткость излучающей плиты уменьшает величину прогиба и изгиба, которые плита испытывает во время работы, тем самым делая отсчеты ускорения первого датчика, установленного непосредственно на плите, более достоверными. Вместе с тем, для дополнительного улучшения отсчетов первый датчик установлен на конкретном месте излучающей плиты, переходном по продольному прогибу во время вибрации. Данное место перехода обычно лучше представляет фактическое ускорение излучающей плиты во время вибрации и исключает чрезмерно увеличенные и уменьшенные отсчеты ускорения, получаемые на других местах на излучающей плите, испытывающих прогиб или изгиб во время вибрации.
[0020] Контроллер соединен для передачи данных с исполнительным механизмом и первым и вторым датчиками. Контроллер управляет работой исполнительного механизма на основе, по меньшей мере частично, первых сигналов, обнаруживаемых первым датчиком, установленным непосредственно на излучающей плите. Например, контроллер вычисляет толкающее усилие в виде взвешенной суммы с использованием значений ускорения первого и второго сигналов и с использованием значений массы для реактивной массы и излучающей плиты. Поскольку значения ускорения от датчика излучающей плиты являются более точными, контроллер может предотвращать завышенную или заниженную оценку вычисленного толкающего усилия во время работы. Данное обеспечивает контроллеру лучшее управление вибратором и обеспечивает передачу вибратором большей энергии в грунт способом, дающим лучшее отражение предпочтительного опорного или контрольного сигнала с конфигурацией для работы вибратора в сейсмической разведке.
[0021] Описанная выше сущность изобретения не направлена на краткое описание каждого потенциального варианта осуществления или каждого аспекта настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] На фиг.1A-1C показан вибратор известного уровня техники в изометрии, спереди и сверху.
[0023] На фиг.2 схематично показан вибратор известного уровня техники фиг.1A-1C.
[0024] На фиг.3A-3C показана излучающая плита для вибратора известного уровня техники в плане, сбоку и в концевом сечении.
[0025] На фиг.4A-4C показ вибратор согласно некоторым идеям настоящего изобретения в изометрии, спереди и сверху.
[0026] На фиг.5 схематично показан вибратор фиг.4A-4C.
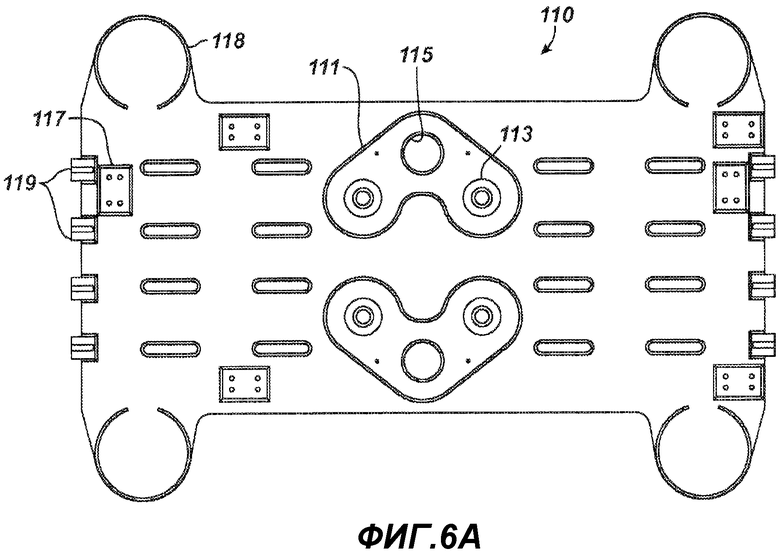
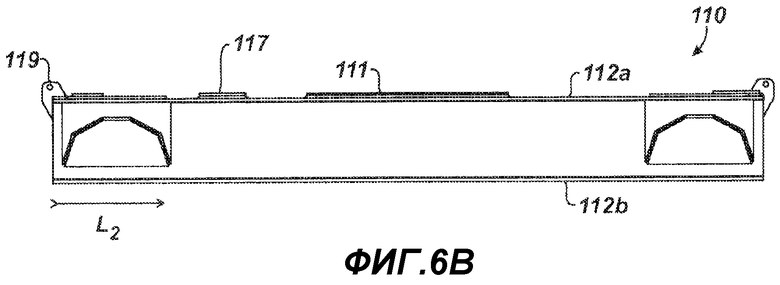
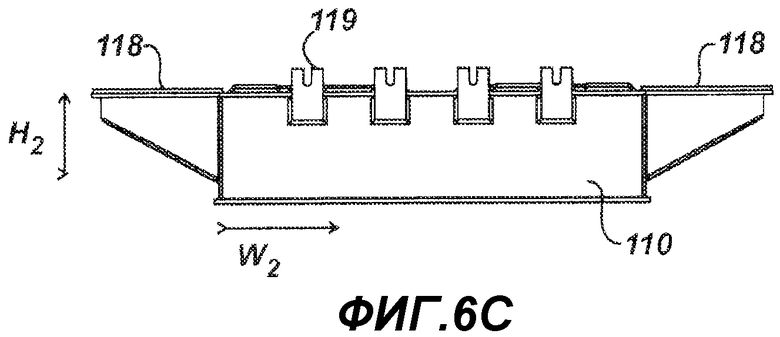
[0027] На фиг.6A-6C показана излучающая плита для вибратора изобретения в плане, сбоку и в концевом сечении.
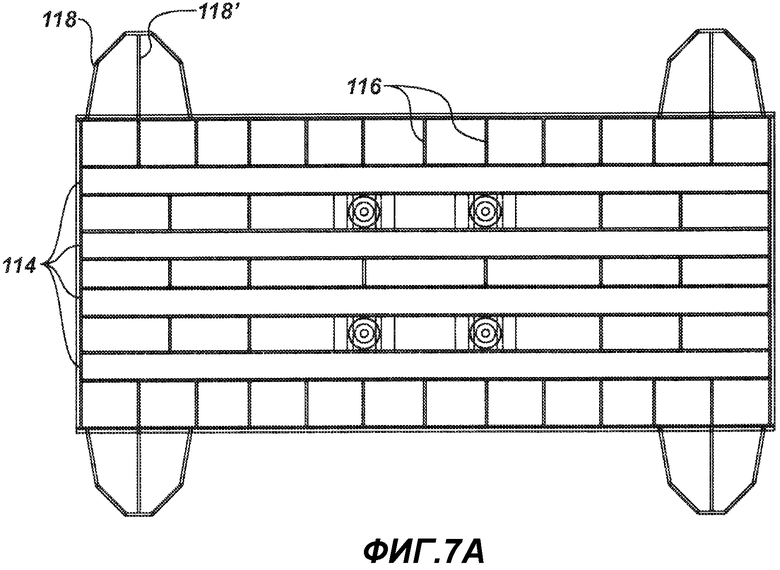
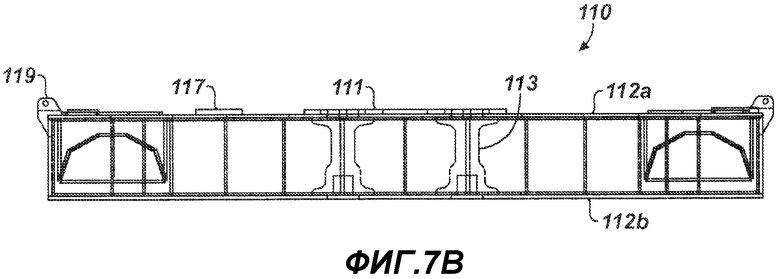
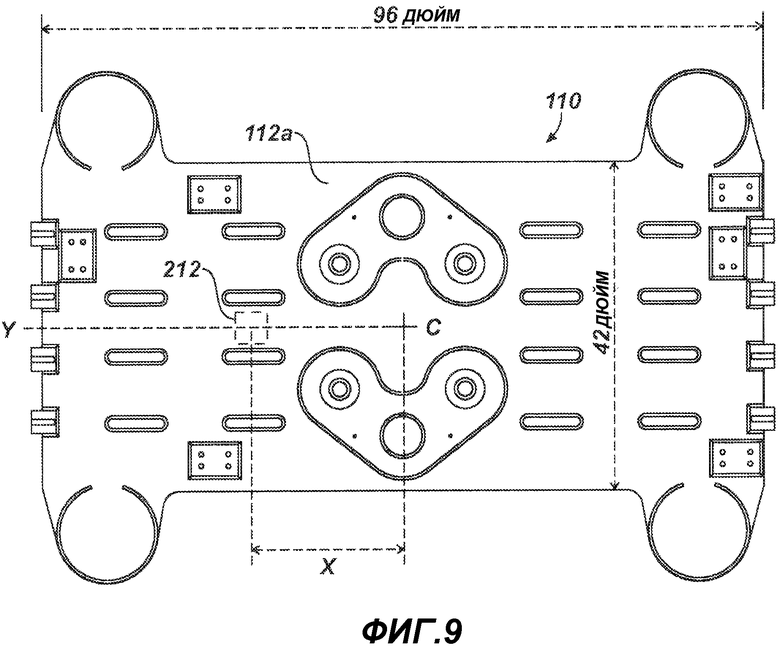
[0028] На фиг.7A-7C показана излучающая плита для вибратора изобретения в разрезе.
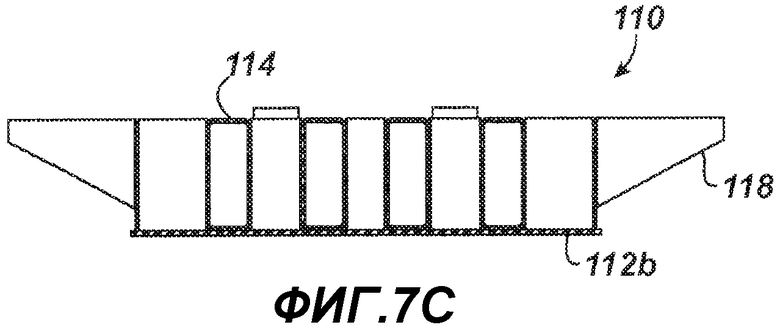
[0029] На фиг.8 схематично показан изгиб, испытываемый плитой основания во время работы.
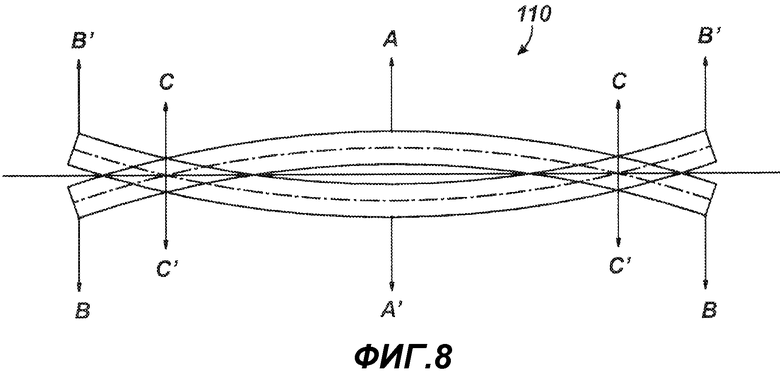
[0030] На фиг.9 на виде в плане плиты основания изобретения показано предпочтительное место прикрепления акселерометра к верхней поверхности.
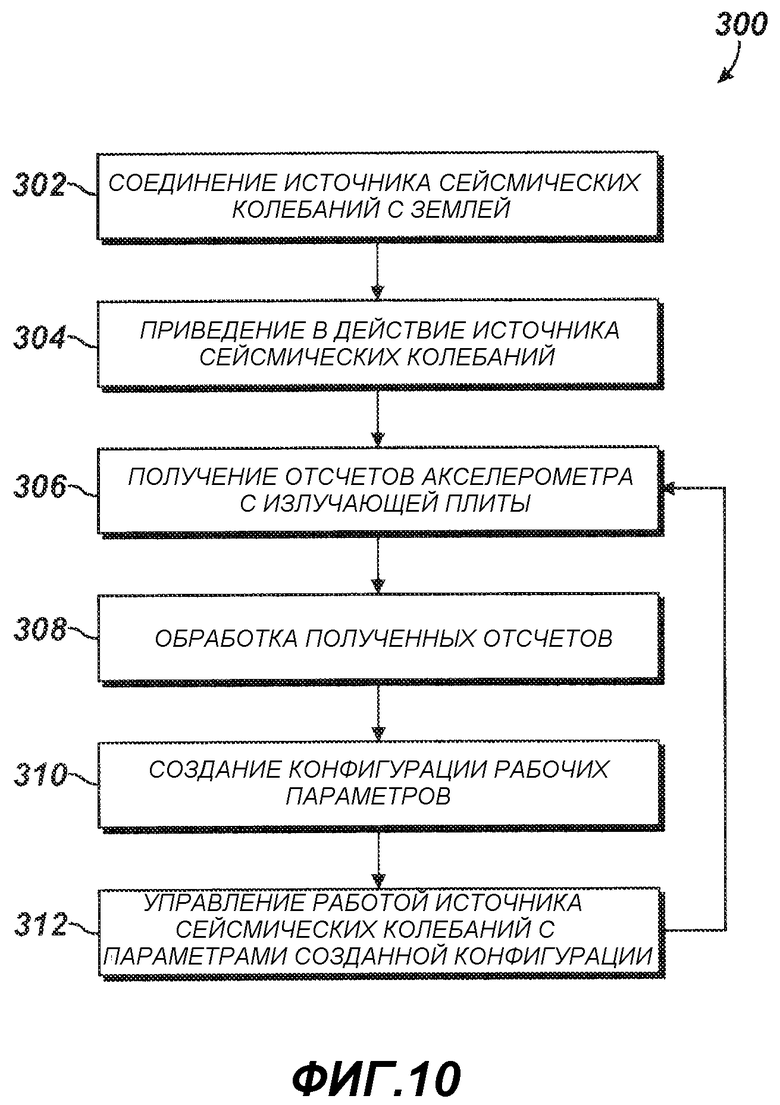
[0031] На фиг.10 показана последовательность операций способа работы вибратора изобретения.
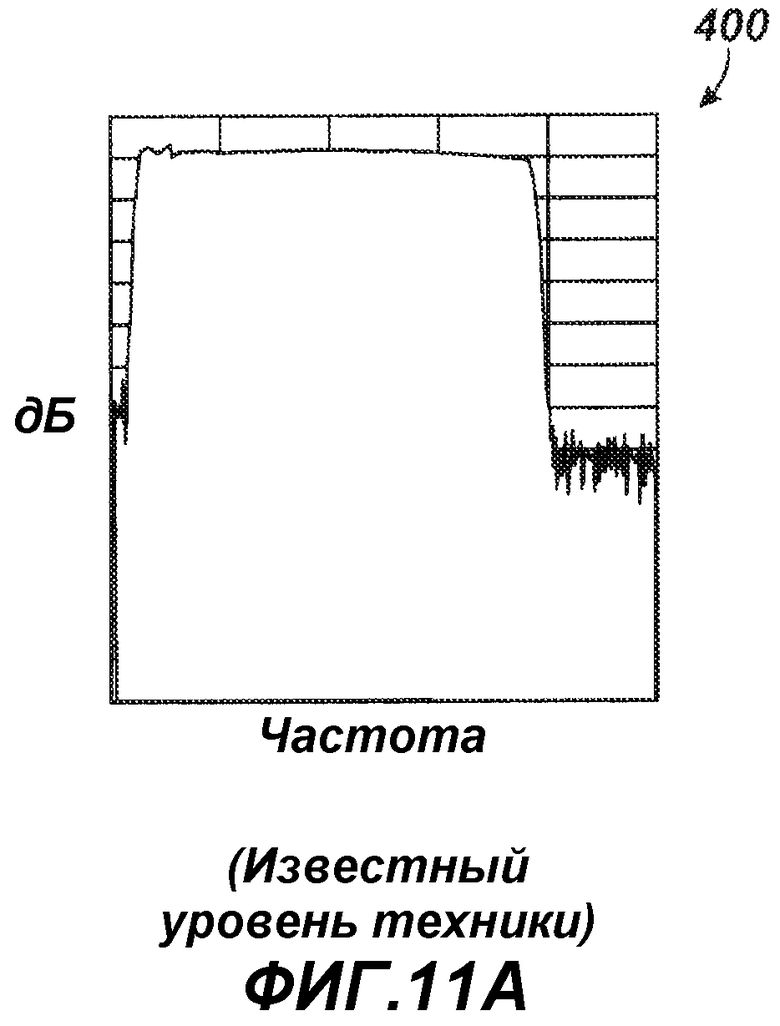
[0032] На фиг.11A показан график спектра мощности для толкающего усилия в виде взвешенной суммы, подсчитанного для вибратора известного уровня техники.
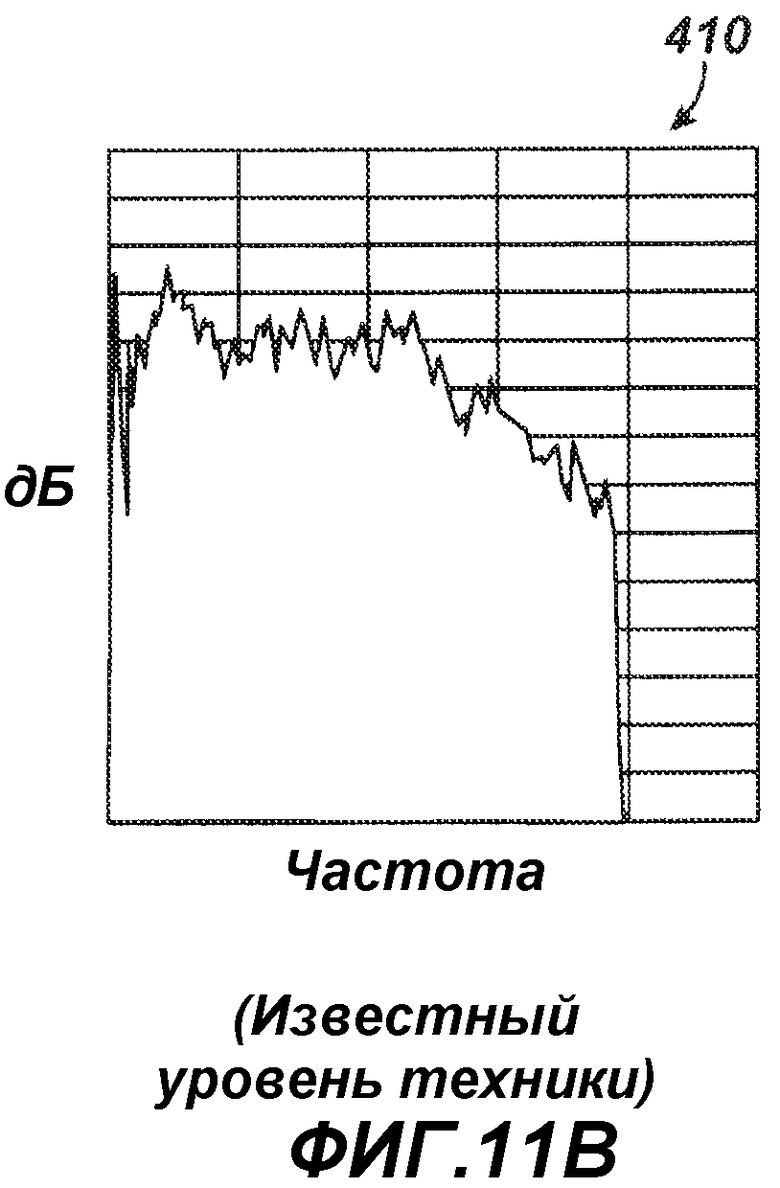
[0033] На фиг.11B показан график фактического спектра мощности вибратора известного уровня техники, измеренной в скважине на глубине 1000 футов (305 м).
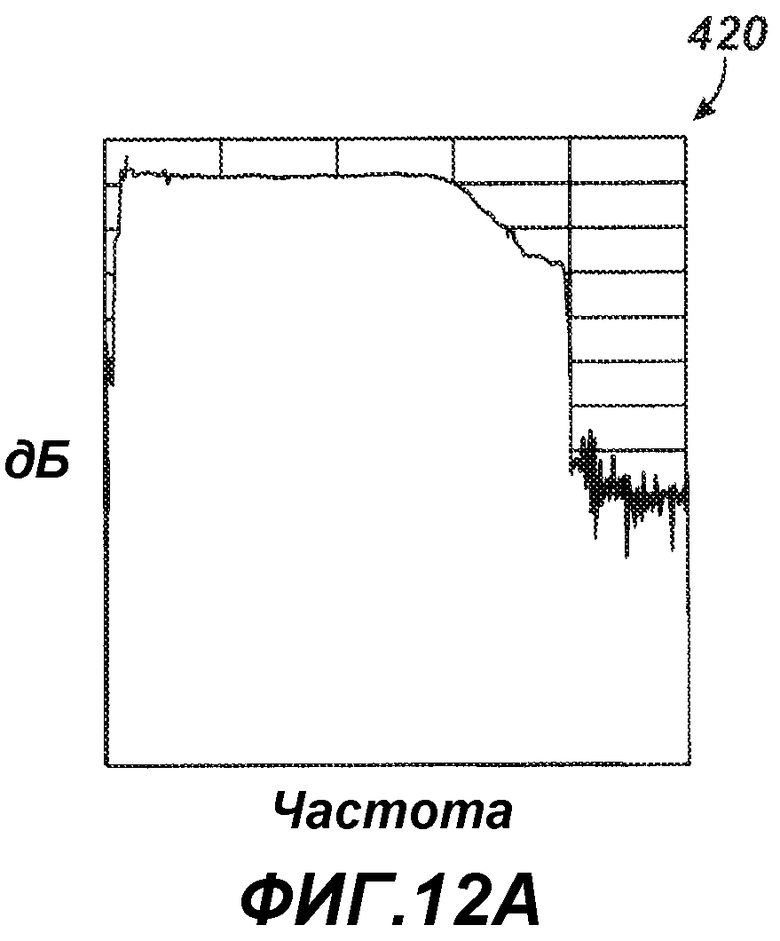
[0034] На фиг.12A показан график спектра мощности для толкающего усилия в виде взвешенной суммы, подсчитанного для вибратора согласно настоящему изобретению.
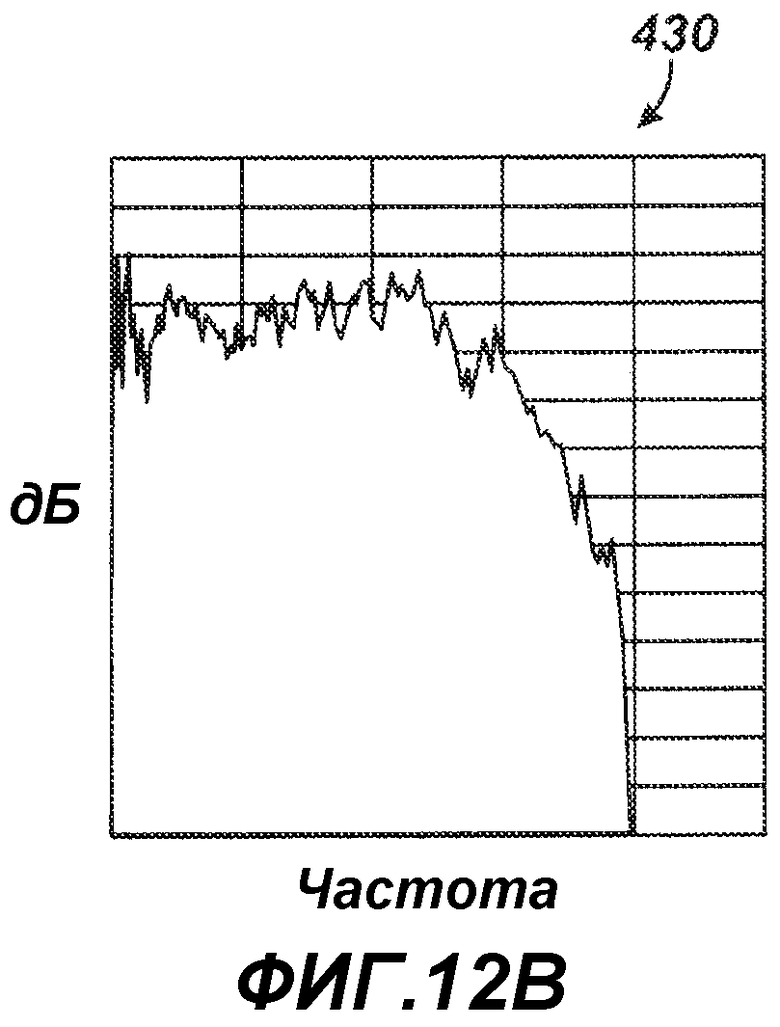
[0035] На фиг.12B показан график фактического спектра мощности вибратора изобретения, измеренной в скважине на глубине 1000 футов (305 м).
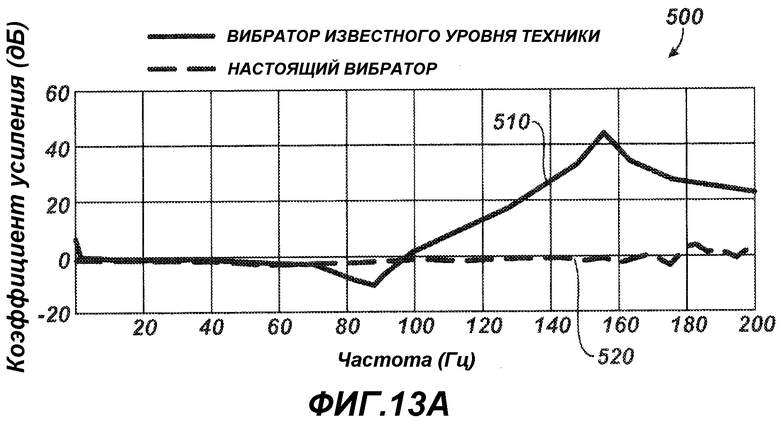
[0036] На фиг.13A показан график соотношения коэффициента усиления (дБ) и частоты (Гц) для вибратора известного уровня техники в сравнении с вибратором изобретения.
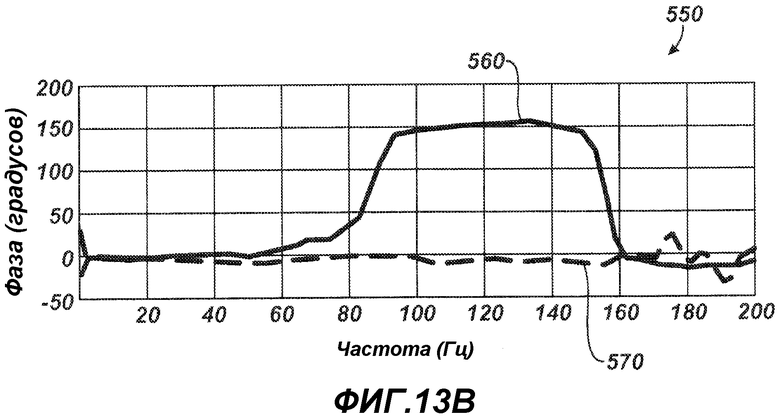
[0037] На фиг.13B показан график фазы (градусы) относительно частоты (Гц) для вибратора известного уровня техники в сравнении с вибратором изобретения.
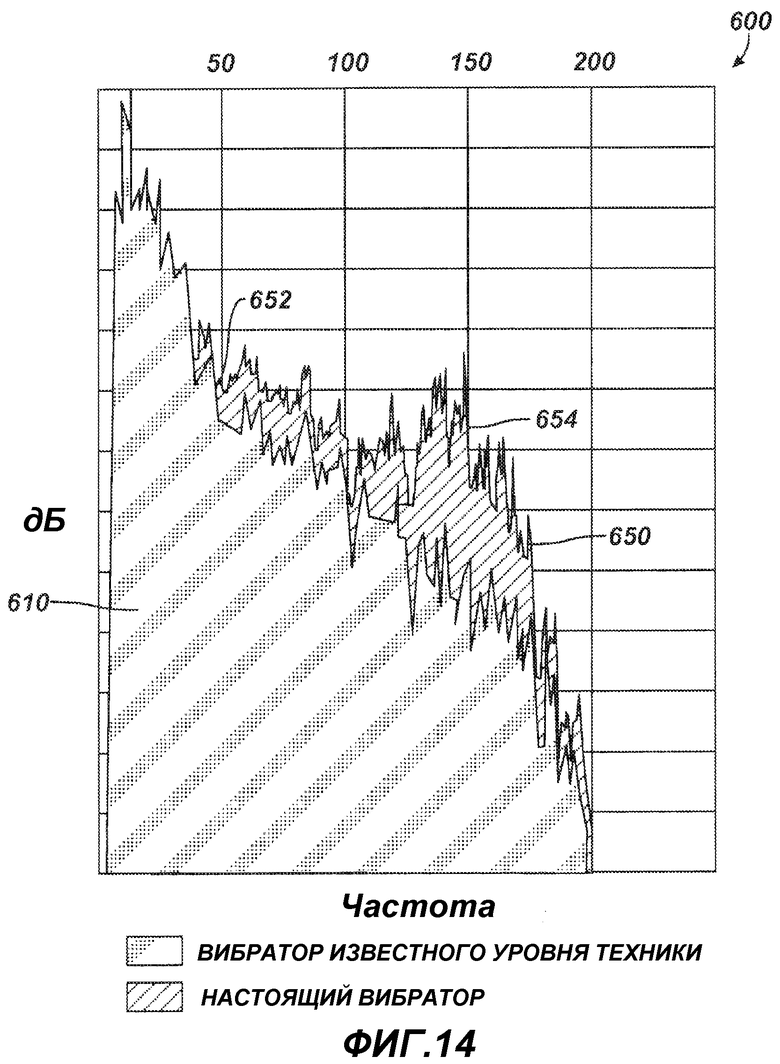
[0038] На фиг.14 показан график первого частотного отклика вибратора известного уровня техники в сравнении с вибратором изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
A. Сборка/Работа в общем плане
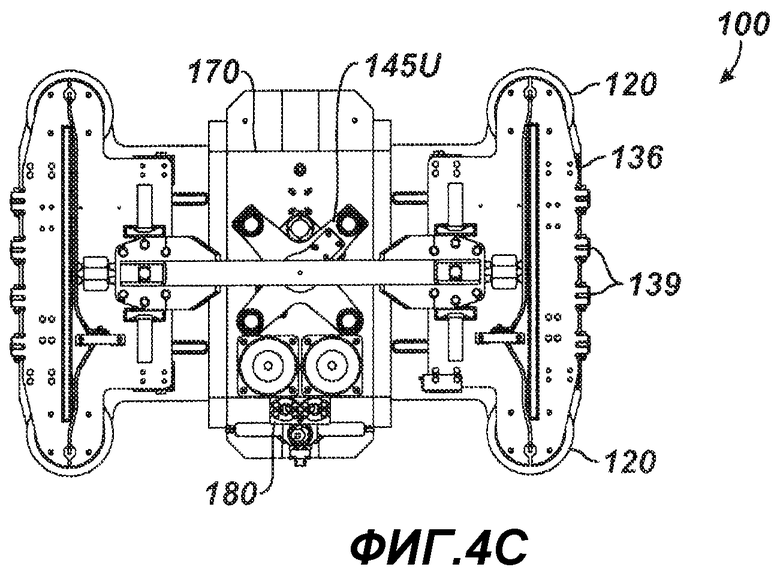
[0039] На фиг.4A-4C показаны виды в изометрии, спереди и сверху сейсмического вибратора 100 согласно некоторым идеям настоящего изобретения. Вибратор 100 изобретения также показан схематично на фиг.5. Вибратор 100 имеет излучающую плиту 110, раму 130 и перемещающуюся реактивную массу 170. Масса 170 и плита 110 основания могут иметь в основном металлическую конструкцию, такую как из стали или черного металла.
[0040] Вибратор 100 передает усилие на грунт с использованием излучающей плиты 110 и реактивной массы 170. Обычно вибратор 100 установлен на шасси или транспортном средстве (не показано) с использованием рамы 130 для спуска вибратора 100 на грунт. Транспортное средство может использовать гидравлический, механический или электромеханический механизм для спуска вибратора 100 на поверхность грунта. Когда вибратор 100 спущен, вес транспортного средства удерживает излучающую плиту 110 в контакте с грунтом так, что сигналы источника сейсмических колебаний могут передаваться в землю во время работы. Другие подробности соединения вибратора 100 с землей транспортным средством или другим шасси хорошо известны в технике и не детализированы в данном документе.
[0041] Перемещающаяся реактивная масса 170 действует на излучающую плиту 110 для передачи сигнала источника сейсмических колебаний в землю. Сейсмический сигнал перемещается сквозь землю, отражается на границах раздела и пластах и перемещается к поверхности земли. Датчики, соединенные с землей, расположены в расстановке разнесенными от вибратора 100. Данные датчики обнаруживают отраженный сигнал источника, и регистрирующая станция, обычно установленная на грузовике, записывает сигналы от датчиков. Регистрирующая станция включает в себя сейсмический регистратор и может также включать в себя корреляционный процессор. Такой корреляционный процессор принимает сигнал от вибратора 100, индикативный для фактического сигнала источника, переданного в землю, и коррелирует принятый сигнал с записанными сигналами.
[0042] Как показано на фиг.4A-4C, реактивная масса 170 установлена непосредственно над излучающей плитой 110. Опорная конструкция 140 проходит от излучающей плиты 110 через массу 170 и стабилизирует реактивную массу 170. Опорная конструкция 140 обычно выполнена с использованием стоек 142, которые могут представлять собой трубы или стержни из стали или т.п. Данные стойки 142 имеют концы, прикрепленные к излучающей плите 110, и проходят вверх от излучающей плиты 110 и через реактивную массу 170. Верхняя крестовина 145U, которая может быть сконструирована из двутаврового профиля из стали или черного металла, соединяется с верхними концами стоек 142 и обеспечивает устойчивость опорной конструкции 140 при вибрации массы 170. Аналогично, нижняя крестовина 145L также соединяется со стойками 142 под массой 170. Виброизолирующие опоры оборудованы на излучающей плите 110 под реактивной массой 170.
[0043] Как лучше всего показано на фиг.5, реактивная масса 170 имеет цилиндр 160, выполненный внутри, плотно прилегающий к вертикально проходящему поршню 150. Поршень 150 соединен своим нижним концом со стыковочной втулкой в нижней крестовине 145L и проходит вверх через цилиндр 160. Верхний конец поршня соединяется со стыковочной втулкой в верхней крестовине 145U. Головка 156 на поршне 150 делит цилиндр 160 на верхнюю и нижнюю камеры 162/164.
[0044] Во время работы контроллер 200 принимает сигналы от первого датчика 210, соединенного с излучающей плитой 110, и от второго датчика 220, соединенного с реактивной массой 170. Дополнительные датчики (не показано) могут быть соединены с транспортным средством (не показано) и с грунтом. Локальные датчики 210/220 могут включать в себя, без ограничения этим, акселерометры с одной или несколькими измерительными осями, сейсмоприемники, датчики микроэлектромеханических систем, аналоговые акселерометры с соответствующим аналого-цифровым преобразованием или другие подходящие датчики. На основе обратной связи от данных датчиков 210/220 и необходимого свип-сигнала, используемого для работы вибратора 100, контроллер 200 генерирует управляющий сигнал для управления блоком 180 сервоклапана. Управляющий сигнал имеет характеристики необходимого свип-сигнала и передается из контроллера 200 на серводвигатель клапана. В свою очередь, двигатель клапана приводит в действие клапан управления в блоке 180 сервоклапана, соединенный с клапаном основной ступени в блоке 180, нагнетающем давление и сбрасывающем давление в гидравлических каналах 182/184.
[0045] Приводимый в действие контроллером 200 клапан 180 поочередно направляет рабочую жидкость гидросистемы под высоким давлением от источника 230 рабочей жидкости гидросистемы к поршню 150 через окна 182/184 в массе 170. С поочередным накоплением рабочей жидкости гидросистемы в камерах 162/164, размещенных непосредственно над поршневой головкой 156 и под ней, реактивная масса 170 возвратно-поступательно вибрирует в вертикальном направлении на поршне 150. В свою очередь, усилие, генерируемое вибрирующей массой 170, передается на излучающую плиту 110 через поршень 150 и опорную конструкцию 140. Следовательно, излучающая плита 110 вибрирует с необходимой амплитудой и частотой для генерирования сигнала источника сейсмических колебаний в грунт.
[0046] Для уменьшения акустического шума с приведением в движение реактивной массы 170 и излучающей плиты 110 контроллер 200 может регулировать усилие и фазу вибрации с использованием обратной связи от датчика 210 на излучающей плите 110 и датчика 220 на реактивной массе 170. На основе сигналов датчиков контроллер 200 может рассчитывать соответствующие перемещения излучающей плиты 110 и массы 170 с использованием алгоритма регулирования усилия и фазы. На основе перемещений и необходимой выходной мощности вибратора 100 контроллер 200 может затем модифицировать сигнал управления, передаваемый в блок 180 сервоклапана, для регулирования подачи рабочей жидкости гидросистемы на реактивную массу 170 и, тем самым, регулирования фазы и частоты получаемого сейсмического сигнала.
[0047] Получение наилучших сигналов перемещения от излучающей плиты 110 может улучшать управление вибратора 100 и выход сейсмической энергии в грунт. По данной причине и, как рассмотрено ниже, излучающая плита 110 предпочтительно является жесткой и имеет увеличенную массу. Кроме того, датчик 210 предпочтительно прикреплен непосредственно к излучающей плите 110 в идеальном месте для получения такого сигнала.
B. Виброизоляция/Конструкция излучающей плиты
[0048] Как указано выше, транспортное средство прикладывает свой статический вес к излучающей плите 110 через раму 130, прижимая излучающую плиту 110 к грунту. Однако вклад рамы 130 и транспортного средства в результирующее сейсмическое усилие, прикладываемое к грунту, предпочтительно сохраняют минимальным, изолируя перемещение излучающей плиты 110 от рамы 130 и транспортного средства с использованием виброизолирующих опор 120.
[0049] Как показано на фиг.4A-4C и 5, рама 130 имеет вертикальные несущие стержни 134 и горизонтальный стержень 132, соединенный с верхними частями данных вертикальных стержней 134. На своих дальних концах вертикальные стержни 134 соединены с основаниями 136. В свою очередь, данные основания 136 соединяются с излучающей плитой 110 с использованием устройств виброизолирующих опор 120, поршней 137 с поворотными шарнирами и элементов 139, работающих на растяжение. Устройство данных компонентов (120, 137 и 139) по существу осуществляет виброизоляцию рамы 130 от излучающей плиты 110 и перемещающейся массы 170, которую оно несет. Кроме того, устройство обеспечивает приложение вибрационного усилия массы 170 на грунт через излучающую плиту 110, при этом минимизируя значение усилия, передаваемого через раму 130 на несущее транспортное средство.
[0050] Каждый вертикальный стержень 134 соединяется с одним из оснований 136. Один конец четырех поршней 137 соединен поворотным шарниром с каждым внутренним углом данных оснований 136, а другой конец поршней 137 соединен поворотным шарниром с излучающей плитой 110. Элементы 139, работающие на растяжение, соединяют внешние края оснований 136 с внешним краем излучающей плиты 110 и поддерживают плиту 110 на опорах 136, когда вибратор 100 поднимают с грунта.
[0051] Со своей стороны виброизолирующие опоры 120 могут представлять собой пневматические амортизаторы или другие виброизолирующие элементы, известные и используемые в технике. Виброизолирующие опоры 120 расположены за пределами основной контактной площади излучающей плиты 110. Конкретно, внешние углы оснований 136 выходят за пределы контактной площади излучающей плиты. Аналогично, полки 118 на излучающей плите 110 выступают от ее краев для опирания виброизолирующих опор 120, расположенных между данными полками 118 и выступающими углами оснований 136. Использование полок 118 и других элементов между рамой 130 и излучающей плитой 110 создает особенно полезный объем свободного пространства на поверхности плиты.
[0052] На фиг.6A-6C показан вид в плане, вид сбоку и вид торца излучающей плиты 110. Как показано на фиг.6B-6C, излучающая плита 110 имеет верхнюю поверхность 112a и нижнюю поверхность 112b. Как показано на фиг.6A, крепежные детали 113 стоек воспринимают усилия в верхней поверхности 112a и окружены усиливающими платформами 111. Крепежные детали 115 виброизолирующих опор в данных платформах 111 удерживают виброизолирующие опоры 144, установленные под реактивной массой 170. Углы верхней поверхности 112a выступают из боковых сторон плиты 110 и имеют удерживающие бурты для виброизолирующих опор 120. Выступающие углы верхней поверхности поддерживаются полками 118, выступающими от боковых стенок излучающей плиты 110. Более короткие края излучающей плиты 110 имеют вилкообразные проушины 119, с которыми соединяются концы элементов 139, работающих на растяжение, и усиливающие платформы 117 для присоединения поршней 137 созданы около внешних краев плиты 110.
[0053] С виброизолирующими опорами 120, установленными на полках 118 за пределами основной контактной площади излучающей плиты 110, верхняя поверхность 112a плиты 110 имеет большие расширения свободной площади с каждой из сторон усиливающих платформ 111, крепежных деталей 113 стоек и виброизолирующих крепежных деталей 115. Данные расширения остаются открытым и не занятыми соединительными или виброизолирующими компонентами вибратора 100. Фактически, зоны верхней поверхности 112a плиты, свободные от соединения с несущими компонентами и контактной площадью массы, могут составлять площадь около 1/2-2/3 контактной площади плиты на ее нижней поверхности 112b.
[0054] Как подробно описано ниже, такое свободное расширение с обеих сторон вибрирующей массы 170 дает возможность установки локального датчика, такого как акселерометр, в конкретном месте на излучающей плите 110, предпочтительном для получения данных перемещения плиты во время работы для использования в вычислении толкающего усилия в виде взвешенной суммы.
[0055] В габаритах излучающая плита 110 может иметь высоту H2 около 10,87 дюймов (28 см), ширину W2 около 42 дюймов (107 см) и длину L2 около 96 дюймов (244 см). Кроме того, излучающая плита 110 может весить приблизительно 4345 фунтов (1973 кг) в одном варианте реализации. Таким образом, излучающая плита 110 может иметь вес приблизительно в 1,08 раз больше веса обычной излучающей плиты известного уровня техники, так что вес излучающей плиты 110 является относительно сравнимым с весом излучающей плиты для вибратора, используемого в технике, с аналогичными расчетными показателями работы. Вместе с тем, излучающая плита 110 может иметь высоту приблизительно 4 дюйма (10 см) (или в 1-2/3 раза) больше высоты обычной известного уровня техники излучающей плиты, так что она имеет гораздо более высокую жесткость.
[0056] В варианте реализации излучающая плита 110 демонстрирует значительно более высокую жесткость, чем излучающая плита известного уровня техники, описанная в разделе предпосылок настоящего изобретения. Как показано в разрезе на фиг.7A-7B, плита 110 имеет четыре внутренние трубы или балки 114, проходящие продольно вдоль длины плиты, и имеет соединительные перегородки 116, установленные между трубами 114 и между длинными наружными стенками излучающей плиты 110. Косынки 118' и полки 118 виброизолирующих опор выступают от длинных боковых стенок плиты, и крепежные детали 113 стоек установлены между парами балок 114. Как лучше всего показано в концевом сечении на фиг.7C, балки 114 являются трубами прямоугольного сечения. Для создания жесткости, увеличенной по сравнению с излучающими плитами известного уровня техники, балки 114 в излучающей плите 110 изобретения имеют увеличенную высоту, составляющую для балок 114 более 10 дюймов (25 см). Другими словами, высота (около 10 дюймов (25 см)) каждой балки 114 составляет более 10% (и, более конкретно, приблизительно 11%) отрезка длины (около 92 дюймов (241 см)), на котором балка 114 может изгибаться во время вибрирования.
[0057] Балки 114 также имеют ширину около 4 дюймов (10 см). Для поддержания веса толщина стенки данных балок 114 составляет предпочтительно около 5/16 дюйма (0,8 см), так что излучающая плита 110 должна иметь вес, приблизительно одинаковый с используемым в вибраторе известного уровня техники, с аналогичными расчетными показателями работы.
C. Размещение локального датчика на излучающей плите
[0058] Для получения наилучших результатов при обработке сигналов источника сейсмических колебаний операторы, предпочтительно, должны знать усилие, прилагаемое вибратором 100 к грунту для генерирования сигналов источника сейсмических колебаний, чтобы в процессе корреляции можно было коррелировать генерируемое толкающее усилие с данными, принимаемыми сейсмоприемниками в поле. В реальных условиях фактическое толкающее усилие, прикладываемое вибратором 100 к грунту во время работы, может не быть точно известным, и толкающее усилие должно быть вычислено на основе, по меньшей мере, частично, масс и ускорений излучающей плиты 110 и реактивной массы 170. Коррелирование вычисленного толкающего усилия с принимаемыми сейсмическими сигналами использует известные методики свертки, не описываемые в данном документе.
[0059] Вибратор 100 настоящего изобретения имеет несколько признаков, помогающих более точно вычислять величину усилия, приложенного к грунту во время работы. Как указано выше, излучающая плита 110 предпочтительно имеет увеличенную толщину, что увеличивает жесткость плиты. В одном варианте реализации излучающая плита 110 имеет толщину приблизительно 10 дюймов (25 см). Данная толщина создает жесткость приблизительно в 2,5 раза больше обычной жесткости, используемой в сравнимых вибраторах известного уровня техники, обычно имеющих излучающую плиту толщиной около 6 дюймов (15 см). Увеличенная жесткость плиты уменьшает возможный прогиб излучающей плиты 110, который может давать нежелательные отсчеты акселерометра 210 излучающей плиты во время работы. Как известно, излучающая плита 110 может работать на поверхности грунтов всех типов, и излучающая плита 110 может претерпевать все виды неизвестных изгибов. Жесткость уменьшает возможный изгиб, делая изгиб жесткой излучающей плиты 110 лучше поддающимся определению.
[0060] C увеличением толщины плиты увеличивается в некоторой степени и масса плиты. В некоторой степени величина реактивной массы 170 также увеличивается, при этом данная масса приблизительно в 3 раза больше массы излучающей плиты 110, при этом увеличивается отношение реактивной массы 170 к массе излучающей плиты 110 до значения, большего обычно используемого в вибраторах известного уровня техники и составляющего около 2. Более точно, обычное соотношение реактивной массы к массе излучающей плиты составляет около 2,02. В одном варианте реализации настоящего вибратора 100 предпочтительное соотношение реактивной массы 170 к массе излучающей плиты 110 увеличено до 2,8 (т.e., около 3).
[0061] Наконец, как указано выше, виброизолирующие опоры 120, используемые для изоляции излучающей плиты 110 от рамы 130, расположены за пределами контактной площади излучающей плиты 110, что освобождает дополнительную площадь поверхности на излучающей плите 110 для установки акселерометра 210 и уменьшает интерференцию от виброизолирующих компонентов.
[0062] Размещение акселерометра 210 непосредственно на излучающей плите 110 выполняют для получения более точного или "достоверного" отсчета для вычисления толкающего усилия и лучшего управления работой вибратора 100. Имея более точные отсчеты акселерометра по перемещениям излучающей плиты, например, контроллер 200 может применить передачу энергии более высокой частоты в грунт, придавая сейсмическим сигналам в грунте более широкую полосу частот для преобразования сейсмической записи в изображение среды. Другими словами, поскольку контроллер 200 использует стандартные алгоритмы взвешенной суммы для управления вибрацией массы 170, более точное знание перемещения излучающей плиты 110 обеспечивает контроллеру 200 получение большего кпд по энергии.
[0063] Предпочтительное или идеальное место акселерометра 210 на излучающей плите 110 определяют с использованием анализа методом конечных элементов. В данном анализе "оптимальное место" или предпочтительное место на подкрепленной излучающей плите 110 определяют таким, где излучающая плита 110 должна испытывать меньше нежелательного прогиба и шума во время работы вибратора 100. Наилучшие места для акселерометра 210 обычно должны располагаться там, где обычно размещены виброизолирующие опоры на вибраторе известного уровня техники. Поэтому, перемещение виброизолирующих опор 120 от обычных мест на места в углах за пределами контактной площади, как в вибраторе 100 изобретения, делает большую часть излучающей поверхности плиты доступной для наилучшего размещения акселерометра 210.
[0064] На фиг.8 схематично показаны перемещения при изгибе, испытываемые излучающей плитой 110 повышенной жесткости во время работы. Излучающая плита 110 представлена в двух измерениях, на плоскости, проходящей вдоль продольной оси плиты. Поскольку плита 110 является трехмерной и вибрирует на поверхности, такой как грунт, фактический изгиб является более сложным, чем показано на иллюстрации, что должно быть ясно специалисту в данной области техники. Анализ методом конечных элементов можно использовать для моделирования перемещений при изгибе излучающей плиты 110. Излучающую плиту 110 повышенной жесткости, вместе с тем, можно лучше моделировать для анализа методом конечных элементов вследствие более предсказуемого перемещения. Для всех практических целей здесь учитывают только продольный изгиб, поперечным изгибом и скручиванием можно пренебречь.
[0065] Во время перемещения вверх при вибрации центральная зона A излучающей плиты 110 изгибается или прогибается вверх, когда в целом плита 110 поступательно перемещается вверх, а крайние зоны B изгибаются или прогибаются вниз, при таком поступательном перемещении вверх при вибрации. В результате, центральная зона A должна испытывать большее ускорение от ускорения, создаваемого поступательным перемещением излучающей плиты, а крайние зоны B должны испытывать меньшее ускорение. При перемещении вниз при вибрации центральная зона A' изгибается или прогибается вниз, когда в целом плита 110 поступательно перемещается вниз и должна испытывать большее ускорение. Крайние зоны B' должны изгибаться или прогибаться вверх при таком поступательном перемещении вниз при вибрации и должны испытывать меньшее ускорение.
[0066] Зоны C-C' на плите 110, вместе с тем, должны испытывать меньшее увеличенное и уменьшенное ускорение, поскольку данные зоны C-C' должны представлять собой площади на плите 110, переходные для изгиба или прогиба во время вибрации. Поэтому, зоны C-C' должны лучше отражать ускорение излучающей плиты при поступательном перемещении вверх и вниз, поскольку в данных зонах C-C' исключена, по меньшей мере, часть изменения ускорения, обусловленного изгибом.
[0067] Для нахождения предпочтительного места на излучающей плите 110 выполняли анализ методом конечных элементов на модели жесткой излучающей плиты 110 для выбора места для акселерометра 210. Затем выполняли фактическое тестирование с установкой акселерометра 210 на выбранное место на верхней поверхности 112a излучающей плиты. Плите 110 затем сообщали вибрацию и измеряли толкающее усилие с помощью датчика нагрузки или другого датчика для непосредственного измерения фактического усилия. Измерение установленного акселерометра 210 использовали для подсчета толкающего усилия в виде взвешенной суммы, которую затем коррелировали с фактическим усилием, измеренным датчиком нагрузки. Процедуру повторяли с установкой на другое место акселерометра на излучающей плите 110. В итоге тестирование выверяло идеальное или предпочтительное пятно на излучающей плите 110 для размещения акселерометра 210, на котором получали наиболее точные или "достоверные" измерения ускорения излучающей плиты, наилучшим образом коррелирующие с фактическим толкающим усилием, измеренным во время экспериментов.
[0068] На виде в плане фиг.9 показано идеальное или предпочтительное место 212 для акселерометра 210 на излучающей плите 110 настоящего изобретения. Данная излучающая плита 110 также имеет размеры 10,87"(H) × 42"(W) × 96"(L) (28 (высота) × 107 (ширина) × 244 (длина) см) и вес 4345 фунтов (1973 кг). С измерением от центра излучающей плиты 110 предпочтительное место 212 акселерометра находится на расстоянии X, составляющем приблизительно 20 дюймов (±0,5 дюймов) (51±1,3 см) от центра C по длине или вдоль продольной оси излучающей плиты 110. Кроме того, предпочтительное место 212 акселерометра находится на расстоянии Y, составляющем приблизительно 0 дюймов (±0,5 дюймов) (0±1,3 см) от центра C по ширине или поперечной оси излучающей плиты 110. Таким образом, предпочтительное место 212 акселерометра лежит на продольной оси плиты, хотя расстояние Y может фактически иметь любое значение по ширине излучающей плиты 110, поскольку изгиб или скручивание по поперечной оси плиты пренебрежительно мало. В любом случае продольное расстояние X вдоль продольной оси плиты составляет приблизительно 41-43% расстояния по плите в продольном направлении от ее центра до поперечного края (т.e. 48"=122 см), составляющего половину полной длины плиты в 96" (244 см). Другими словами, в продольном направлении расстояние X от места 212 составляет около 20%-21% полной длины излучающей плиты 110.
[0069] Естественно, зеркально расположенное место с другой стороны от центра излучающей плиты 110 должно также являться предпочтительным. Таким образом, один или несколько акселерометров могут быть установлены на излучающей плите 110 в одном или обоих данных идентифицированных местах 212. Предпочтительным акселерометром для прикрепления к излучающей плите 110 на данном месте является акселерометр модели М5ТС фирмы Pelton Land Energy System. Данный акселерометр имеет размеры 4,00" (10 см) (ширина) × 4,25" (11 см) (длина) × 2,25" (6 см) (высота) и должен соединяться с заранее просверленными в верхней поверхности 112a плиты отверстиями.
D. Работа с использованием локального датчика
[0070] С учетом приведенного выше описания вибратора 100, излучающей плиты 110 и других компонентов ниже рассмотрена работа вибратора 100 изобретения. На фиг.10 показана блок-схема 300 последовательности операций способа работы вибратора 100 изобретения фиг.4A-4C и 5. Во время работы по блок-схеме 300 источник сейсмических колебаний 100 соединяют с землей с использованием подъемного механизма на грузовике для спуска источника 100 с рамой 130 так, что излучающая плита 110 входит в контакт с грунтом (блок 302).
[0071] Когда излучающая плита 110 надлежащим образом установлена, операторы приводят в действие сейсмический источник (блок 304). Здесь контроллер 200 создает конфигурацию сигнала управления для блока 180 сервоклапана с необходимой шириной полосы частот и длительностью развертки и управляет подачей рабочей жидкости гидросистемы к поршню 160 для получения необходимой вибрации массы 170, приложенной к излучающей плите 110 и грунту. Сигнал источника сейсмического вибратора является обычным свип-сигналом с синусоидальными колебаниями, находящимися в диапазоне от 2 Гц до 100 Гц или 200 Гц и имеющими длительность порядка 2-20 секунд в зависимости от ландшафта, подземной литологии и т.д.
[0072] Во время работы вибратор 100 вырабатывает энергию источника сейсмических колебаний, которая передается в грунт, отражается горизонтами геологической среды и обнаруживается сейсмоприемниками на поверхности. Одновременно, контроллер 200 получает отсчеты от локального датчика 210 излучающей плиты и датчика 220 массы (блок 306). Кроме того, контроллер 200 может получать отсчеты от дополнительных датчиков, таких как датчики давления и т.д.
[0073] Отсчет массы 170, в общем, является точным, поскольку отсутствуют отклонения или т.п. по габариту, массе и размерам. Как указано выше, локальный датчик 210 для излучающей плиты 110 может являться акселерометром или т.п., жестко размещенным на излучающей плите 110 для получения предпочтительных отсчетов ускорения плиты 110, когда масса 170 вибрирует и передает вибрацию на излучающую плиту 110. Как рассмотрено выше, данные отсчеты с локального датчика 210, находящегося в предпочтительном месте 212, являются более точными, чем можно получать с другого места, поскольку такое место свободно от других компонентов (т.e. виброизолирующих опор, элементов, работающих на растяжение, и т.д.) излучающей плиты 110. Кроме того, данные отсчеты от локального датчика 210, находящегося в предпочтительном месте, являются более точными, поскольку предпочтительное место претерпевает переход между продольным изгибом по длине излучающей плиты во время вибрирования, и поэтому на нем лучше отражается фактическое перемещение излучающей плиты 110 без добавления перемещения прогиба и изгиба излучающей плиты 110.
[0074] Контроллер 200 обрабатывает отсчеты, полученные от датчиков 210 и 220 (блок 308), и создает конфигурацию рабочих параметров для вибратора 100 на основе данных отсчетов (блок 310). В управлении вибратором 100 контроллер 200 может использовать конкретный тип фазовой автоподстройки частоты для автоподстройки фазы сигнала управления контроллера к фазе излучающей плиты 110, реактивной массы 170, толкающего усилия или т.п.
[0075] Например, контроллер 200 использует опорный или контрольный сигнал для управления работой вибратора 100 в предпочтительном режиме с конкретной длительностью, полосой частот свипа, толкающими усилиями и т.п. На основе данного контрольного сигнала контроллер 200 создает конфигурацию управляющего сигнала для приведения в действие вибратора 100, управляя гидравлическим исполнительным механизмом. Фазовая автоподстройка частоты вибратора 100 по толкающему усилию использует сигнал от датчика 220, индикативный для ускорения реактивной массы 170, и сигнал от датчика 210, индикативный для ускорения излучающей плиты 110. С использованием данных сигналов контроллер 200 вычисляет толкающее усилие в виде взвешенной суммы, передаваемое вибратором 100 на грунт. Данное толкающее усилие в виде взвешенной суммы вычисляют с использованием стандартного уравнения, известного в технике, суммирующего кинетическую энергию излучающей плиты 110 (масса излучающей плиты 110, умноженная на ее ускорение) с кинетической энергией реактивной массы 170 (масса реактивной массы 170, умноженная на ее ускорение).
[0076] После создания конфигурации контроллер 200 управляет работой вибратора 100 с параметрами новой конфигурации (блок 312). Затем с использованием фазовой автоподстройки частоты толкающего усилия контроллер 200 коррелирует фазу вычисленного толкающего усилия с фазой контрольного сигнала для корректировки управляющего сигнала, посылаемого на вибратор 100. Данная корреляция удаляет или уменьшает несоответствия между толкающим усилием и контрольным сигналом так, что они совпадают по фазе или синхронизируются друг с другом. Это улучшает работу вибратора 100, передаваемое толкающее усилие и получаемые в результате различными путями сейсмические данные, рассмотренные в данном документе.
E. Графики
[0077] Как рассмотрено выше, определение, достоверно ли толкающее усилие вибратора в виде взвешенной суммы представляет фактическое толкающее усилие, остается постоянной проблемой в технологии вибрационной сейсмики. Освобождение пространства на излучающей плите 110 и, особенно, размещение акселерометра 210 на предпочтительном месте 212 в данном свободном пространстве улучшает работу вибратора 100 изобретения и результаты, полученные при его работе, как отмечено выше. Ниже рассмотрены данные результаты.
[0078] Для сравнения график 400 на фиг.11A показывает спектр мощности для толкающего усилия в виде взвешенной суммы, подсчитанного для вибратора известного уровня техники, а график 420 на фиг.12A показывает спектр мощности для толкающего усилия в виде взвешенной суммы, подсчитанного для вибратора 100 согласно настоящему изобретению. Данный график 420 соответствует вибратору 100 изобретения, имеющему излучающую плиту 110, предпочтительное размещение акселерометра и другие признаки, раскрытые в данном документе.
[0079] При сравнении спектров мощности для толкающих усилий в виде взвешенной суммы в графиках 400/420 должно казаться, что вибратор известного уровня техники (фиг.11A) лучше работает на высоких частотах, чем вибратор изобретения (на фиг.12A). Вместе с тем, при рассмотрении сигналов в скважине на глубине 1000 футов (305 м) ясно, что сигнал для вибратора 100 изобретения более близко напоминает фактически вводимый в грунт. Конкретно, фактический спектр 410 мощности для вибратора известного уровня техники, измеренный в скважине на глубине 1000 футов (305 м), показан на фиг.11B. На фиг.12B показан отличающийся график фактического спектра 430 мощности измеренного в скважине на глубине 1000 футов (305 м) для вибратора изобретения. Как видно из данных двух графиков, спектр 430 вибратора изобретения имеет более высокий уровень мощности, измеренной в скважине, чем спектр 410 вибратора известного уровня техники.
[0080] Во время работы вибратор известного уровня техники, очевидно, работает в категории выполнения достаточного ввода плоского спектра на всем интервале до 201 Гц, как видно на фиг.11A. В отличие от этого, вибратор 100 изобретения, очевидно, распознает, что достигнут предел физических возможностей вибратора для эффективного ввода в грунт на частотах выше около 150 Гц, о чем свидетельствует некоторое падение спектра мощности в графике 420 фиг.12A. Вместе с тем, данное твердо указывает, что взвешенная сумма вибратора изобретения более согласована с сигналом, фактически вводимым в грунт, чем получаемая вибратором известного уровня техники при сравнении спектров 410/430.
[0081] Лучшее согласование между толкающим усилием в виде взвешенной суммы и фактическим толкающим усилием вибратора изобретения наилучшим образом показано на фиг.13A-13B. Как показано на графике 500 на фиг.13A, первая кривая 510 показывает коэффициент усиления (дБ) относительно частоты (Гц) для вибратора известного уровня техники, а вторая кривая 520 показывает коэффициент усиления (дБ) относительно частоты (Гц) для вибратора 100 изобретения. Данные коэффициенты усиления сравнивают толкающее усилие в виде взвешенной суммы, вычисленное для вибратора с фактическим усилием, измеренным датчиком нагрузки во время испытаний. Сравнение данных двух кривых 510/520 показывает, что вибратор изобретения дает более устойчивый коэффициент усиления в диапазоне частот, показывая, что во всем диапазоне частот толкающее усилие в виде взвешенной суммы, вычисленной во время работы вибратора изобретения, близко совпадает с фактическим толкающим усилием, измеренным датчиком нагрузки. Вибратор известного уровня техники, вместе с тем, очевидно, имеет увеличивающееся отклонение вычисленного толкающего усилия в виде взвешенной суммы и фактического толкающего усилия на более высоких частотах.
[0082] Указанное также верно для соотношения фаз вибратора изобретения. На графике 550 фиг.13B первая кривая 560 показывает соотношение фаз (в градусах) относительно частоты (Гц) для вибратора известного уровня техники, а вторая кривая 570 показывает соотношение фаз (в градусах) относительно частоты (Гц) для вибратора изобретения. Сравнение данных двух кривых 560/570 показывает, что фаза во время работы вибратора изобретения более близко совпадает с фактически измеренной фазой во всем диапазоне частот, чем у вибратора известного уровня техники. Указанное также подтверждает, что использование вибратора 100 изобретения может давать лучшее согласование между толкающим усилием в виде взвешенной суммы и фактическим толкающим усилием.
[0083] Как рассмотрено выше, излучающая плита 110 с увеличенной жесткостью, предпочтительным местом 212 акселерометра 210 на излучающей плите 110 и другие признаки, раскрытые в данном документе, помогают вибратору 100 изобретения вырабатывать увеличенное толкающее усилие и более широкую полосу частот для сейсмического отображения по сравнению с вибраторами известного уровня техники. Излучающая плита 110 увеличенной жесткости и другие признаки помогают в получении данной улучшенной работы. При этом даже само по себе надлежащее размещение акселерометра 210 на излучающей плите 110 может улучшать работу.
[0084] На фиг.14, например, график 600 показывает первый спектр 610 мощности для вибратора 100 изобретения с излучающей плитой 110 и другими признаками, раскрытыми в данном документе, но с акселерометром, установленным на верхней крестовине (145U; на фиг.1A-1C) как в известном уровне техники. Данный первый спектр 610 показан в сравнении со вторым спектром 650 мощности для вибратора 100 изобретения с акселерометром 210 на излучающей плите 110, размещенным в предпочтительном месте 212 согласно настоящему изобретению. Два вибратора для обоих спектров 610/650 работают с использованием опорного сигнала 1-201 Гц в течение 20 секунд.
[0085] Первый спектр 610 показывает неуклонный спад мощности (дБ) с увеличением частоты. В отличие от этого, второй спектр 650 показывает более сдержанное реагирование на средних и более высоких частотах. Например, второй спектр 650 в точке 652 показывает 3 дБ при 50 Гц и снижается медленнее с увеличением частоты в сравнении с первым спектром 610. Кроме того, второй спектр 650 в точке 654 показывает 14 дБ при 150 Гц, что значительно больше, чем в первом спектре 610 на данной частоте. Данное указывает, что размещение акселерометра 210 на предпочтительном месте 212 на излучающей плите 110 улучшает спектр мощности вибратора изобретения по сравнению с обычным случаем установки акселерометра на верхней крестовине.
[0086] Хотя вибратор 100 изобретения описан с гидравлическим приводом реактивной массы, специалистам в данной области техники должно быть ясно, что идеи настоящего изобретения можно применить для других типов исполнительных механизмов, создающих возвратно-поступательное перемещение реактивной массы. В общем, поэтому, вибратор 100 изобретения может создавать возвратно-поступательное перемещение реактивной массы с использованием линейного асинхронного двигателя, линейного синхронного двигателя, управляемого гидравлического исполнительного механизма или любого другого исполнительного механизма, используемого в технике. В дополнение к вертикальному вибрированию вибратор 100 изобретения может также вырабатывать сейсмические поперечные волны ("S-волны"). Настоящее изобретение сфокусировано на источнике сейсмических колебаний по одной оси для ясности и без ограничения этим объема изобретения. Специалисты в данной области техники должны понимать, что вибрационный источник с колебаниями по нескольким осям, способный передавать как P-волны, так и S-волны в землю, можно выполнить согласно настоящему изобретению. Например, детали, относящиеся к соединению описанного вибратора 10 с землей, и детали, относящиеся к другим исполнительным механизмам для вибратора 100 изобретения, можно найти в публикациях патентов США №№ 2007/0250269, 2007/0240930 и 2009/0073807, включенных в данный документ в виде ссылки.
[0087] Приведенное выше описание предпочтительных и других вариантов осуществления не направлено на ограничение или сужение объема или применимости концепций изобретения, предложенного заявителями. Раскрывая в данном документе концепции изобретения, заявители имеют все права по содержанию, изложенному в прилагаемой формуле изобретения. Поэтому, предполагается, что прилагаемая концепция изобретения включает в себя все модификации и изменения в полном объеме, по пунктам из следующей формулы изобретения или их эквивалентам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРИРОВАНИЕ СЕЙСМИЧЕСКИХ ВИБРАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2448349C2 |
| КОНТРОЛЬ КАЧЕСТВА ДЛЯ ШИРОКОПОЛОСНЫХ СВИП-СИГНАЛОВ | 2014 |
|
RU2665346C2 |
| Способ излучения сейсмических волн вибрационным источником | 1984 |
|
SU1166038A1 |
| Источник сейсмических сигналов | 1983 |
|
SU1125567A1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2570587C1 |
| СИСТЕМА ПОМОЩИ В ПОЗИЦИОНИРОВАНИИ ДЛЯ ГРУЗОВИКА С ВИБРАТОРОМ И СООТВЕТСТВУЮЩИЙ ГРУЗОВИК С ВИБРАТОРОМ И СПОСОБ | 2019 |
|
RU2721444C1 |
| Гидравлический вибрационный источник сейсмических волн | 1982 |
|
SU1101711A1 |
| Широкополосный сейсмический вибратор | 1989 |
|
SU1817051A1 |
| Активное виброзащитное устройство | 1987 |
|
SU1661525A1 |
| ВИБРАЦИОННЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2225626C2 |
Изобретение относится к области геофизики и может быть использовано для проведения сейсморазведочных работ. Сейсмический вибратор имеет излучающую плиту, по меньшей мере, с четырьмя виброизолирующими опорами, изолирующими раму от излучающей плиты. Каждая из данных виброизолирующих опор поддерживается полками излучающей плиты, смещенными от контактной площади излучающей плиты. Акселерометр, установленный непосредственно на излучающей плите, обнаруживает ускорение, передаваемое на плиту. Для уменьшения прогиба и изгиба плита имеет увеличенную жесткость и приблизительно одинаковую массу плиты для сравнимого по расчетным показателям работы вибратора. Акселерометр установлен на конкретном месте плиты, испытывающей переход между изгибом вдоль продольной оси плиты. Данное место перехода лучше представляет фактическое ускорение плиты во время вибрации и исключает чрезмерно увеличенные и уменьшенные отсчеты ускорения, которые должны получаться на других местах на плите. Технический результат: повышение точности разведочных данных. 3 н. и 23 з.п. ф-лы, 27 ил.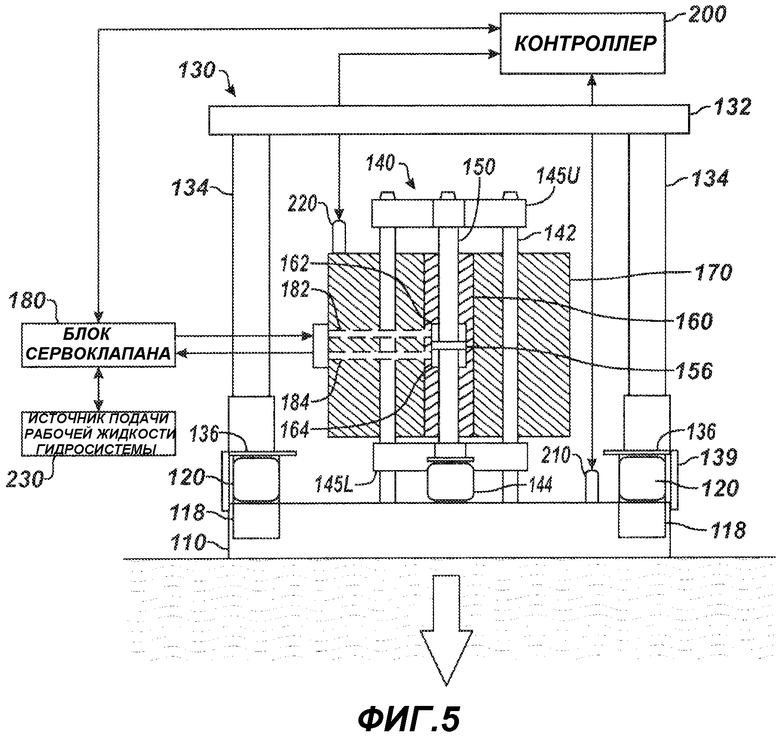
1. Сейсмический вибратор, содержащий:
излучающую плиту с продольной осью;
массу, установленную с возможностью перемещения относительно излучающей плиты для передачи энергии вибрации на нее;
исполнительный механизм, соединенный с массой, для перемещения массы относительно излучающей плиты;
первый датчик, установленный на излучающей плите и определяющий первые сигналы, показывающие ускорение, передаваемое на излучающую плиту, причем первый датчик установлен в местоположении, где излучающая плита испытывает переходы между изгибом или прогибом во время вибрации; и
контроллер, соединенный для передачи данных с исполнительным механизмом и первым датчиком, причем контроллер, управляющий вибратором на основе, по меньшей мере, частично, первых сигналов от первого датчика.
2. Вибратор по п.1, в котором первый датчик выбран из группы, состоящей из акселерометра с одной измерительной осью, акселерометра с несколькими измерительными осями, сейсмоприемника, датчика микроэлектромеханических систем, цифрового акселерометра и аналогового акселерометра с аналого-цифровым преобразователем.
3. Вибратор по п.1, дополнительно содержащий второй датчик, установленный на массе и определяющий вторые сигналы, показывающие ускорение массы.
4. Вибратор по п.3, в котором контроллер соединен для передачи данных со вторым датчиком и вычисляет толкающее усилие в виде взвешенной суммы на основе значений ускорения по первому и второму сигналам и на основе значений массы для реактивной массы и излучающей плиты.
5. Вибратор по п.1, в котором исполнительный механизм содержит:
сервоклапан, управляемый контроллером, и поршень, установленный внутри массы и гидравлически соединенный с сервоклапаном.
6. Вибратор по п.5, в котором поршень соединен с опорной конструкцией, установленной на излучающей плите, причем опорной конструкцией, поддерживающей поршень и массу над излучающей плитой.
7. Вибратор по п.6, в котором опорная конструкция содержит:
множество стоек, прикрепленных к излучающей плите и проходящих через массу;
первую крестовину, опирающую один конец поршня на стойки; и
вторую крестовину, опирающую другой конец поршня на стойки.
8. Вибратор по п.1, в котором излучающая плита содержит множество балок, установленных параллельно друг другу вдоль продольной оси, причем каждую из балок с высотой, по меньшей мере, составляющей 10% или больше отрезка длины изгиба балок во время вибрации излучающей плиты.
9. Вибратор по п.1, дополнительно содержащий раму, поддерживающую излучающую плиту относительно грунта и имеющую, по меньшей мере, четыре виброизолирующие опоры, изолирующие раму от излучающей плиты.
10. Вибратор по п.9, в котором каждая, по меньшей мере, из четырех виброизолирующих опор установлена в местоположении в углу излучающей плиты и установлена смещенной от контактной площадки излучающей плиты.
11. Вибратор по п.10, в котором излучающая плита содержит множество полок, поддерживающих виброизолирующие опоры, причем полки установлены в местоположениях в углах и смещены от контактной площади.
12. Вибратор по п.9, в котором рама содержит первую и вторую опоры, каждую установленную с одной стороны массы и каждую изолированную от излучающей плиты, по меньшей мере, двумя виброизолирующими опорами.
13. Вибратор по п.9, в котором рама содержит множество элементов, работающих на растяжение, соединяющих между собой внешние поперечные края излучающей плиты и внешние края первой и второй опор.
14. Вибратор по п.9, в котором рама содержит множество амортизаторов, соединяющих между собой верхнюю поверхность излучающей плиты и нижнюю поверхность первой и второй опор, причем амортизаторов, установленных по краям излучающей плиты.
15. Вибратор по п.1, в котором излучающая плита имеет нижнюю поверхность, образующую первую контактную площадь, и в котором излучающая плита имеет верхнюю поверхность, имеющую зоны, свободные от соединения с несущими компонентами и свободные от второй контактной площади массы, причем зоны, образующие вторую площадь, составляющую около 1/2-2/3 первой площади.
16. Вибратор по п.1, в котором излучающая плита имеет продольную длину, и в котором первый датчик установлен на продольном расстоянии от центра продольной длины, составляющем около 41-43% половины продольной длины излучающей плиты.
17. Вибратор по п.16, в котором излучающая плита содержит множество балок, установленных параллельно друг другу вдоль продольной оси, каждую из балок с высотой, составляющей, по меньшей мере, 10% или больше продольной длины излучающей плиты.
18. Вибратор по п.16, в котором первый датчик установлен на продольной оси, проходящей через центр излучающей плиты.
19. Вибратор по п.1, в котором первое значение массы для реактивной массы приблизительно в три раза больше второго значения массы для излучающей плиты.
20. Вибратор по п.1, в котором излучающая плита задана с размером длины и размером ширины, при этом размер длины больше, чем размер ширины.
21. Сейсмический вибратор, содержащий:
излучающую плиту, имеющую верхнюю поверхность, нижнюю поверхность и продольную ось, причем нижнюю поверхность, соединяемую с грунтом;
раму, поддерживающую излучающую плиту относительно грунта и имеющую, по меньшей мере, четыре виброизолирующие опоры, изолирующие раму от излучающей плиты, причем каждая из, по меньшей мере, четырех виброизолирующих опор, установлена в углу излучающей плиты и смещена от первой контактной площади нижней поверхности излучающей плиты;
массу, установленную с возможностью перемещения над излучающей плитой и передающую на нее энергию вибрации;
исполнительный механизм, соединенный с массой и перемещающий массу относительно излучающей плиты;
первый датчик, установленный на излучающей плите и обнаруживающий первые сигналы, показывающие ускорение, передаваемое на излучающую плиту, причем первый датчик, установленный в местоположении, где излучающая плита испытывает переходы между изгибом или прогибом во время вибрации; и
контроллер, соединенный для передачи данных с исполнительным механизмом и первым датчиком, причем контроллер, управляющий работой вибратора на основе, по меньшей мере, частично, первых сигналов от первого датчика.
22. Вибратор по п.20, в котором излучающая плита задана с размером длины и размером ширины, при этом размер длины больше, чем размер ширины.
23. Способ генерирования сигнала источника сейсмических колебаний, содержащий:
перемещение реактивной массы относительно излучающей плиты приведением в действие исполнительного механизма;
передачу сейсмической энергии от излучающей плиты на грунт с передачей энергии вибрации от массы на излучающую плиту;
получение первого отсчета ускорения от первого датчика, установленного на излучающей плите, причем первого датчика, установленного в местоположении, где излучающая плита испытывает переходы между изгибом или прогибом во время вибрации; и
управление исполнительным механизмом на основе, по меньшей мере, частично, первого отсчета ускорения.
24. Способ по п.23, дополнительно содержащий:
получение второго отсчета ускорения от второго датчика, установленного на реактивной массе; и
управление исполнительным механизмом на основе первого и второго отсчетов ускорения.
25. Способ по п.24, в котором управление исполнительным механизмом содержит вычисление толкающего усилия в виде взвешенной суммы на основе первого и второго отсчетов ускорения и на основе значений массы для реактивной массы и излучающей плиты.
26. Способ по п.23, в котором задан размер длины и размер ширины излучающей плиты, при этом размер длины больше, чем размер ширины.
| ДВОЙНАЯ БУРИЛЬНАЯ КОЛОННА И СПОСОБ ИЗГОТОВЛЕНИЯ ДВОЙНОЙ БУРИЛЬНОЙ ТРУБЫ ДЛЯ ДВОЙНОЙ БУРИЛЬНОЙ КОЛОННЫ | 2001 |
|
RU2190746C1 |
| УСТРОЙСТВО ДЛЯ ПОСЫЛКИ СЕЙСМОВИБРАЦИОННЫХ ВОЛН | 2005 |
|
RU2351956C2 |
| US 3929206 A, 30.12.1975 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6612396 B1, 02.09.2003 | |||
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |

