Область техники, к которой относится изобретение
В общем настоящее раскрытие относится к сейсмической разведке и, в частности, к способам и устройствам для регистрации и обработки геофизической информации.
Предшествующий уровень техники
В области разведочных работ на нефть и газ обычно используют геофизические приборы и способы, чтобы идентифицировать подземную структуру, имеющую потенциальные месторождения углеводородов. Сейсмические вибрационные источники энергии или просто сейсмические вибраторы используют в полевых условиях в течение многих лет для генерирования сигналов источника. Сейсмический вибратор в самом простейшем виде представляет собой всего лишь тяжелый механизм, который обладает способностью сотрясать грунт в определенном диапазоне частот, чтобы передавать вибрационные сейсмические сигналы в нижний горизонт геологической среды в течение заданного периода времени, что позволяет иметь меньший мгновенный уровень энергии, чем при импульсно возбуждаемых генераторах, таких как взрывчатое вещество.
Сообщаемая энергия, называемая в этой заявке «сейсмическими сигналами источника», проходит через нижний горизонт, а некоторая часть энергии отражается от подземных геологических структур или слоев. После этого отраженная энергия передается обратно к земной поверхности, где ее регистрируют, используя детектор движения грунта. Регистрируемые данные обрабатывают и интерпретируют, чтобы получать информацию о местоположении и физических свойствах подземных структур и слоев.
Сейсмический сигнал источника обычно представляет собой свип-сигнал или просто свип. Свип-сигналы являются синусоидальными вибрациями и в зависимости от ландшафта, глубинной литологии, экономических ограничений и физических возможностей вибратора могут иметь длительность порядка от около 5 до больше чем 20 секунд. Частота синусоидального свип-сигнала может возрастать с течением времени, и он называется свип-сигналом вверх. Свип-сигнал вверх является сигналом, обычно используемым при современной сейсмической разведке. Кроме того, частота синусоидального свип-сигнала может уменьшаться с течением времени, и он называется свип-сигналом вниз. Конечным результатом свип-сигнала вибратора являются волны, которые распространяются через грунт, чтобы возвратиться с информацией о глубинной зоне.
Сейсмические волны распространяются через грунт и отражаются от подземных пластов. Границы между пластами из материалов различной плотности или структуры часто отражают сейсмические волны, и сейсмическую информацию, связанную с этими волнами, собирают, обрабатывают, интерпретируют для образования представления или «картин» глубинной зоны. Чтобы собрать необходимую для обработки информацию, можно использовать любое количество разведочных систем. Приемные датчики, такие как геофоны-велосиметры, акселерометры и/или гидрофоны, можно располагать линиями, или в случае гидрофонов по желанию буксировать, для измерения амплитуды сейсмических волн, создаваемых сейсмическим источником, отражаемых от глубинных границ и затем возвращающихся к развернутым датчикам. Исследованиями с многочисленными пунктами возбуждения обеспечивается способ сокращения времени регистрации данных со всей площади исследований. При традиционных исследованиях с одним пунктом возбуждения регистрируют данные от одного пункта возбуждения в особый промежуток времени. Исследования с многочисленными пунктами возбуждения используют для регистрации данных от многочисленных пунктов возбуждения в особый промежуток времени, обеспечивая более быстрый сбор данных по сравнению с традиционными способами с одним источником. Чтобы выделять каждый источник из регистрируемой записи от многочисленных источников, в современных способах с многочисленными источниками используют излучение более длительных сигналов или повышают количество излучаемых вибрационных сигналов по сравнению с традиционным излучением одним источником.
Краткое изложение сущности изобретения
Ниже представлено краткое изложение нескольких аспектов изобретения, чтобы обеспечить понимание по меньшей мере некоторых аспектов изобретения. Краткое описание не является подробным анализом раскрытия. Не предполагается идентификация ключевых или критических элементов изобретения или очерчивание объема притязаний. В нижеследующем описании представлены в общем виде только некоторые концепции изобретения в качестве вводной части более подробного описания, которое следует ниже.
Раскрыты способ и устройство для генерирования сейсмического сигнала источника. Согласно одному аспекту способ включает в себя генерирование энергии в виде множества вибрационных сигналов, представляющих собой последовательные во времени сигналы, разделенные в зависимости от времени, где каждый из множества вибрационных сигналов содержит отличающуюся сигнатуру. Вибрационные сигналы излучают на ландшафт, представляющий интерес, в качестве сейсмических сигналов источника.
Согласно еще одному аспекту способ регистрации геофизической информации включает в себя установку в заданное положение множества сейсмических приемников на ландшафте, представляющем интерес, и прием множества сейсмических сигналов источника множеством сейсмических приемников, при этом сейсмические сигналы источника представляют собой последовательные во времени сигналы, разделенные в зависимости от времени и/или частоты, где каждый из множества сейсмических сигналов источника содержит отличающуюся сигнатуру.
Согласно еще одному аспекту способ обработки геофизической информации включает в себя прием регистрируемой сейсмической информации, при этом регистрируемая сейсмическая информация включает в себя множество сейсмических сигналов, сейсмические сигналы представляют собой последовательные во времени сигналы, разделенные в зависимости от времени и/или частоты, где каждый из множества сигналов содержит отличающуюся сигнатуру. Способ также включает в себя обработку сейсмической информации для выделения сейсмической информации применительно к каждому из множества сигналов.
Устройство согласно одному аспекту включает в себя опорную плиту, которая связана с поверхностью грунта, реактивную массу, которая перемещается относительно опорной плиты, и управляемое обратной связью исполнительное устройство, при этом управляемое обратной связью исполнительное устройство прилагает силу к реактивной массе, которая вызывает линейное перемещение реактивной массы, линейное перемещение реактивной массы порождает сейсмическую энергию, распространяющуюся в грунт, где сейсмическая энергия существует в виде множества последовательных во времени сейсмических сигналов, сейсмические сигналы разделены в зависимости от времени, где каждый из множества сейсмических сигналов содержит отличающуюся сигнатуру.
Краткое описание чертежей
Для полного понимания настоящего раскрытия следует обратиться к нижеследующему подробному описанию нескольких неограничивающих осуществлений в сочетании с сопровождающими чертежами, на которых аналогичные элементы имеют одинаковые позиции и на которых:
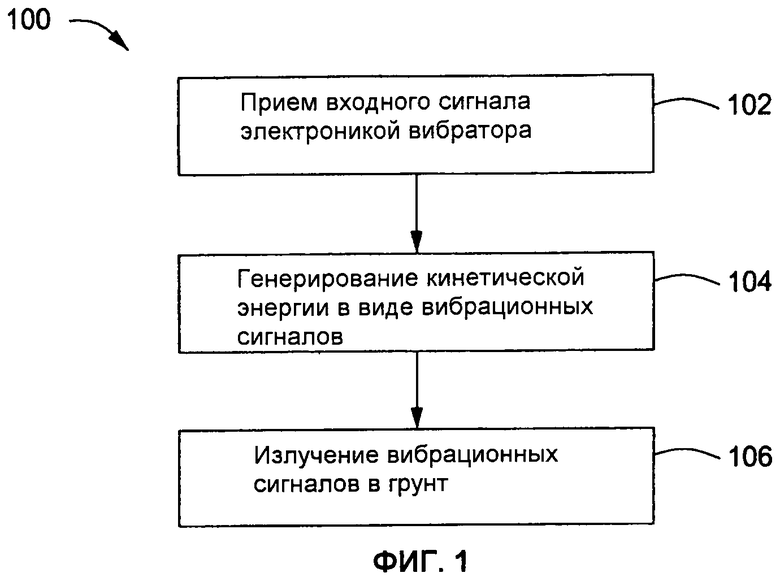
фиг.1 - изображает пример способа генерирования и распространения сейсмической энергии в грунт;
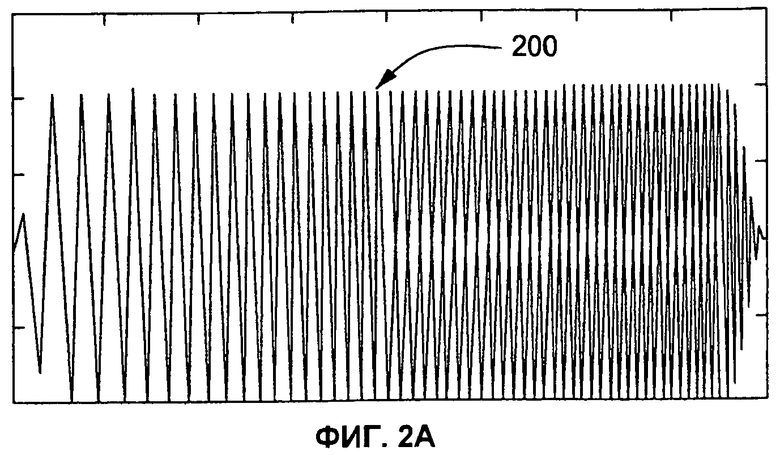
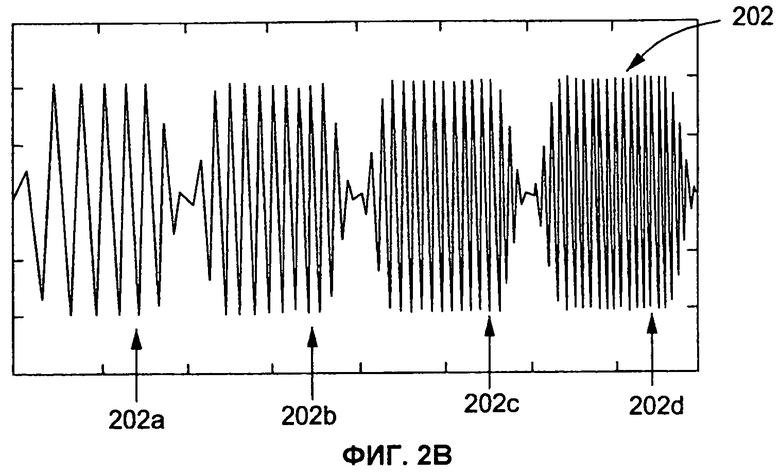
фиг. 2А-2С - пример формирования входных сигналов для вибрационной системы, имеющих особую сигнатуру;
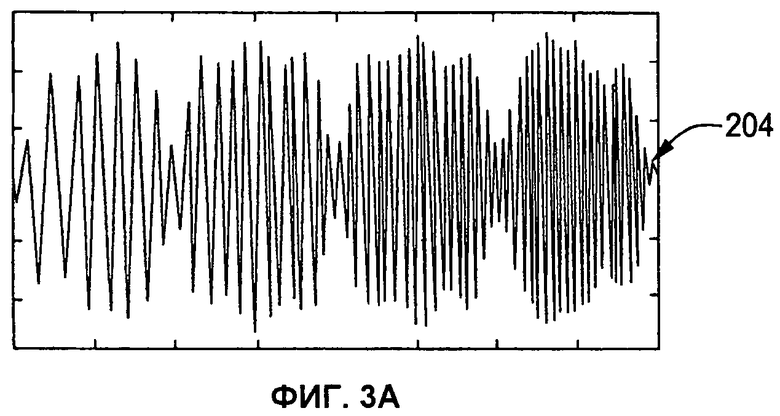
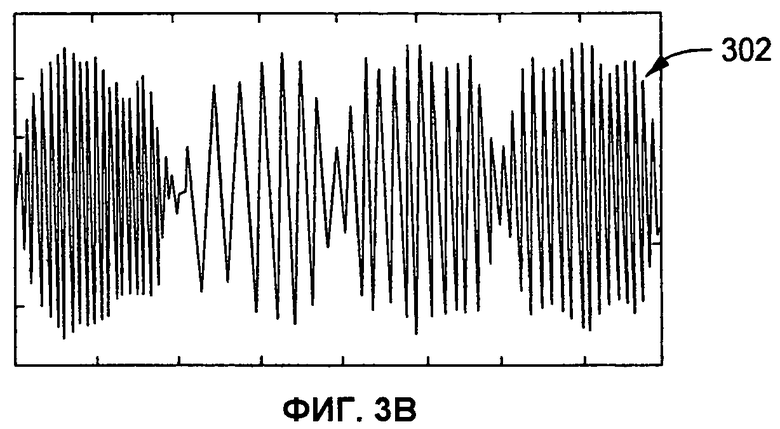
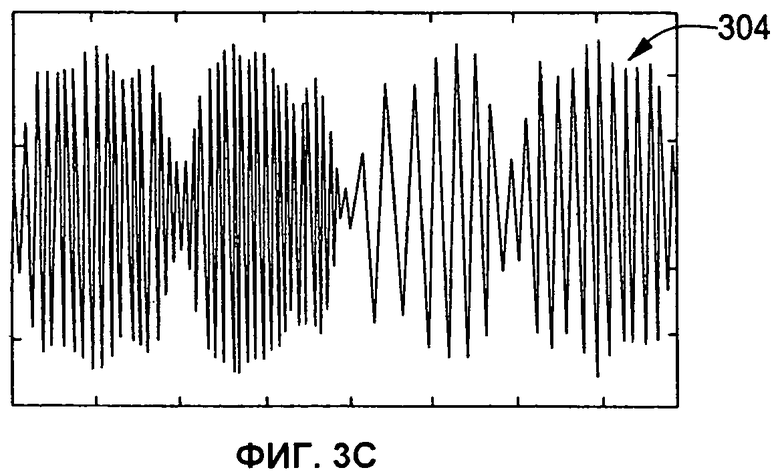
фиг. 3A-3D - пример способа формирования необычных входных сигналов для системы генерирования сейсмических сигналов, состоящей из четырех источников, при этом каждый входной сигнал имеет особую сигнатуру;
фиг.4 - схема примера наземной сейсмической вибрационной системы для генерирования и распространения энергии продольных волн в грунт;
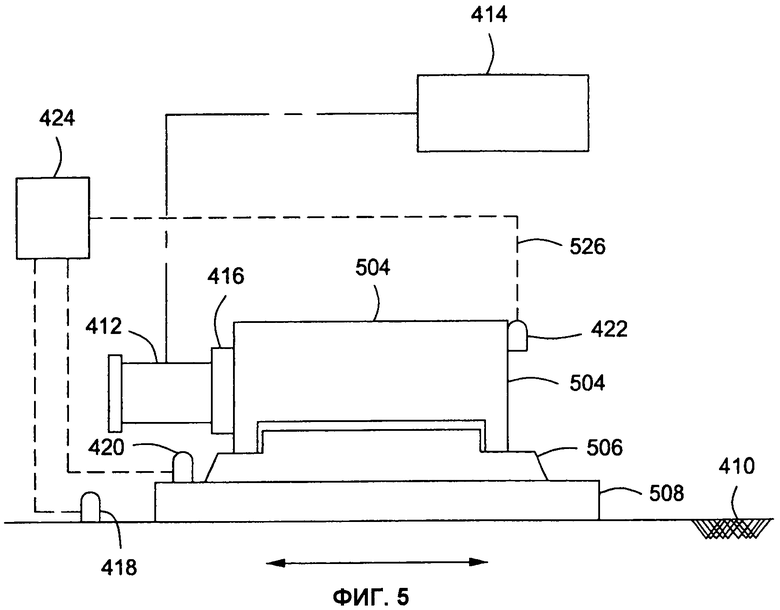
фиг.5 - еще одна схема примера наземной сейсмической вибрационной системы для генерирования и распространения энергии поперечных волн в поверхность грунта;
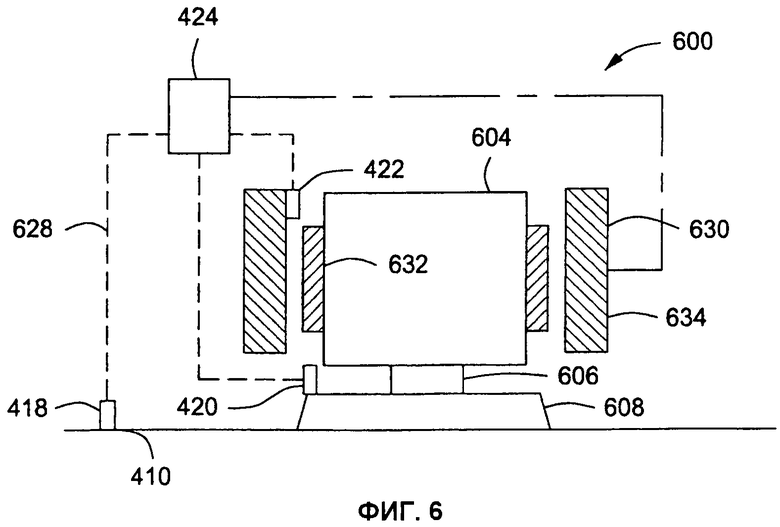
фиг.6 - пример наземной сейсмической вибрационной системы, имеющей внешний привод относительно реактивной массы;
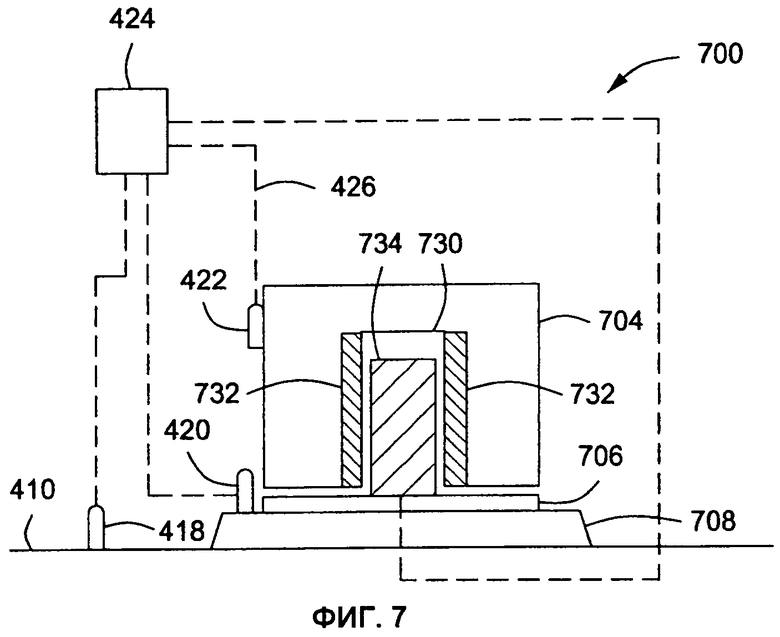
фиг.7 - пример наземной сейсмической вибрационной системы, имеющей привод внутри реактивной массы.
Описание примеров осуществления изобретения
В настоящем раскрытии используются термины, значения которых должны содействовать пониманию сведений, приводимых в этой заявке. Например, термин «устройство обработки информации», используемый в этой заявке, означает любое устройство, которое передает, принимает, обрабатывает, преобразует, вычисляет, модулирует, транспонирует, переносит, сохраняет или иным образом использует информацию. В нескольких неограничивающих объектах из раскрытия устройство обработки информации включает в себя компьютер, который исполняет программируемые команды на выполнение различных способов.
Термин «геофизическая информация», используемый в этой заявке, означает информацию, относящуюся к местоположению, форме, протяженности, глубине, составу, типу, свойствам и/или количеству геологических тел. Геофизическая информация включает в себя, но необязательно ограниченную ею, морскую, из переходной зоны, с морского донного кабеля и наземную сейсмическую информацию. Сейсмическая информация, используемая в этой заявке, включает в себя, но без ограничения ими, одно или несколько из аналоговых сигналов, цифровых сигналов, регистрируемых данных, структур данных, информации из базы данных, параметров, относящихся к геологии поверхности, типа источника, местоположения источника, местоположения приемника, типа приемника, времени возбуждения источника, продолжительности работы источника, частоты источника, амплитуды волны, фазы волны, частоты волны, ускорения волны, скорости волны и/или направления волны, или любое сочетание из них.
Геофизическую информацию можно использовать для многих задач. В некоторых случаях геофизическую информацию, такую как сейсмическая информация, можно использовать для формирования изображения подземных структур. Построение изображения, используемое в этой заявке, включает в себя любое представление подземной структуры, включая, но без ограничения ими, графические представления, математическое или числовое представление, ленточные диаграммы или любую другую выходную информацию процесса, представляющую подземную структуру.
Термин «реактивная масса» используется в этой заявке в сочетании с сейсмическим вибратором. В наземных сейсмических вибраторах согласно раскрытию может использоваться сильно утяжеленная структура, которая совершает возвратно-поступательное движение для управляемой передачи энергии в грунт. В общем случае сильно утяжеленная структура в этой заявке называется «реактивной массой». «Реактивная масса» может перемещаться относительно других структур вибратора, таких как опорная плита.
Раскрыты сейсмическое устройство одновременного или асинхронного излучения с многочисленными сейсмическими вибраторами и способ, который значительно сокращает время полевых работ по сравнению с современными способами излучения с многочисленными сейсмическими вибраторами. Продолжительность вибрации с использованием раскрытых способов и установок сравнима с продолжительностью вибрации обычного единственного вибросейсмического источника, и в то же время обеспечивается разделение данных, сравнимое с разделением в современных способах с многочисленными источниками или превосходящее его, благодаря излучению набора временных последовательностей с низким искажением, которые однозначно разделены по частоте и/или фазе в зависимости от времени, так что каждый источник в пределах набора излучает особую сигнатуру. Раскрытые новые способы разделения обеспечивают примерно такие же длительности (6-12 сек) свип-сигналов и затраты на отработку, как при обычной регистрации с единственным пунктом возбуждения. Преимущества эффективного использования времени реализуются раскрытыми способами при использовании протоколов единственного источника или использовании протоколов многочисленных источников.
На фиг.1 показан неограничивающий пример способа генерирования разделенных сейсмических сигналов источника. В общем случае способ 100 включает в себя прием 102 входного сигнала на сейсмическом вибраторе, генерирование 104 энергии в виде множества последовательных во времени вибрационных сигналов и излучение 106 вибрационных сигналов в ландшафт, представляющий интерес, в качестве сейсмических сигналов источника.
«Входные сигналы» в нескольких неограничивающих осуществлениях представляют собой требуемые сигнальные формы для конкретной сейсмической разведки. В идеальном случае сейсмический сигнал источника, проходящий в грунт, идентичен входному сигналу. Входные сигналы можно создавать вне места разведки или входные сигналы можно создавать на месте разведки. После формирования входные сигналы подают на вибратор или вибраторы для использования электроникой вибратора, например, контроллером, для управления вибрационной системой. Вибрационная система преобразует входные сигналы в кинетическую энергию реактивной массы вибратора. Энергия реактивной массы вибрационной системы в этой заявке будет называться вибрационным сигналом.
В нескольких неограничивающих осуществлениях несколько сейсмических вибраторов располагают на или вблизи ландшафта, представляющего интерес. Отдельные сейсмические вибраторы могут быть сейсмическими вибраторами любого типа, в которых можно регулировать искажение до уровня, при котором имеется возможность разделения сигнатур во время обработки в полевых блоках или в устройстве для обработки сейсмической информации. Отвечающие требованиям неограничивающие вибраторы могут включать в себя гидравлическую исполнительную систему, имеющую цепь регулирования с обратной связью для регулирования гармонических искажений. Один пример такого вибратора раскрыт в заявке №11/691925 на патент США под названием “Apparatus and method for generating a seismic source signal”, полное описание которой включено в эту заявку путем ссылки. Другие неограничивающие примеры отвечающих требованиям вибраторов включают в себя сейсмические вибраторы, имеющие управляемые исполнительные устройства с линейными электрическими двигателями. Некоторые примеры их описаны ниже.
Отклонения от допустимого уровня искажений генерируемых сигналов могут быть компенсированы способами раздельной обработки в тех случаях, когда сигнатуры излучаемых сигналов являются достаточно индивидуальными для распознавания в пределах диапазона искажений. В общем случае термин «низкий уровень искажений», используемый в этой заявке, относится к полному коэффициенту гармоник (THD). Полный коэффициент гармоник добавляет неопределенность в возможность разделения регистрируемой информации, и приемлемый уровень полного коэффициента гармоник может изменяться и может зависеть от одного или нескольких факторов. Некоторые факторы, которые могут позволять иметь более или менее приемлемый полный коэффициент гармоник, включают в себя конкретную сейсмическую запись, используемые способы регистрации, используемые способы фильтрации, используемые способы вычитания и способы обработки информации. Поэтому термин «низкий уровень искажений» должен рассматриваться в этой заявке как означающий приемлемый уровень полного коэффициента гармоник. В большинстве случаев полный коэффициент гармоник меньше чем около 5% будет приемлемым. В некоторых осуществлениях приемлемый коэффициент гармоник может быть 5% или больше. Разделение источников при любой конкретной операции регистрации сейсмической информации будет функцией геометрии источника, интенсивности сигнала и нескорректированного искажения вибратора.
В нескольких осуществлениях входные сигналы разделяют по частоте во времени, чтобы формировать входные сигналы, имеющие особые сигнатуры. В еще одном осуществлении входные сигналы разделяют по фазе во времени, чтобы формировать сигналы, имеющие особые сигнатуры. В других неограничивающих осуществлениях входные сигналы могут быть разделены совокупно по частоте и фазе во времени.
Несколько сейсмических вибраторов могут работать на излучение соответствующих разделенных вибрационных сигналов в качестве сейсмических сигналов источника, хорошо согласованных с соответствующими входными сигналами примерно в один и тот же момент времени или по существу одновременно. В еще одном осуществлении разделенные вибрационные сигналы могут излучаться в качестве сейсмических сигналов источника с частичным перекрытием во времени. Как вариант разделенные вибрационные сигналы могут излучаться асинхронно один за другим.
На фиг. 2А-2С и фиг. 3А-3С показан неограничивающий способ формирования входных сигналов, имеющих особую сигнатуру сигнала. Специалисты в данной области техники должны осознавать, что изображение реальных сигналов с использованием графически немасштабированных данных не представляется возможным. Поэтому, чтобы упростить иллюстрацию идеи, изображения масштабированы и сдвинуты. На фиг.2А показан базовый сигнал 200, имеющий амплитуду (по вертикальной оси), масштабированную к ±1. По горизонтальной оси показаны 4000 точек данных в пределах свип-сигнала от 5 до 25 Гц. На фиг.2В базовый сигнал фрагментирован путем использования обработки с постепенным ослаблением сигнала, выполняемой программой синтеза свип-сигналов или иной программой формирования сигналов. В данном случае базовый сигнал показан фрагментированным на четыре фрагмента 202а, 202b, 202c и 202d, но можно использовать больше или меньше чем четыре фрагмента. Следует отметить, что каждый фрагмент имеет особую частотную характеристику. Фазовые характеристики нескольких сигналов источника будут описаны ниже с обращением к фиг. 3A-3D. Затем фрагменты сигнала 202 спектрально компенсируют, используя программу, чтобы получать входной сигнал, имеющий особую сигнатуру 204 сигнала.
В одном неограничивающем осуществлении операцию регистрации сейсмической информации выполняют при проведении сейсмической разведки, используя четыре сейсмических источника, где каждый источник излучает разделенный вибрационный сигнал в грунт в качестве сейсмического сигнала источника, имеющего особую сигнатуру вибрационного сигнала, хорошо согласованную с соответствующим входным сигналом. Затем сейсмическая информация, зарегистрированная с использованием сейсмических датчиков, может быть разделена применительно к нескольким сигналам источника с использованием способов обработки информации, которыми информация разделяется на части на основе сигнатур сигналов. В примере с четырьмя источниками соответствующие входные сигналы могут быть разделены так, как показано на фиг. 3A-3D, хотя другие сигнатуры находятся в рамках объема раскрытия. В данном случае на фиг.3А показан входной сигнал 204, имеющий сигнатуру, описанную выше и показанную на фиг.2С. На фиг.3В показан входной сигнал 302, используемый вторым вибратором, где входной сигнал 302 второго вибратора имеет особую сигнатуру по отношению к сигналу 204, подаваемому на первый вибратор. Аналогично этому на фиг. 3С и 3D показаны соответствующие специфические входные сигналы 304, 306, подаваемые на электронику соответствующих вибраторов, которые отличаются от других излучаемых сигналов 204, 302. Каждый входной сигнал с особой сигнатурой можно формировать путем кругового сдвига во времени сигналов, используя процесс фрагментации и компенсации, рассмотренный выше в отношении базового сигнала 200.
На фиг.4 схематично показан неограничивающий пример наземной сейсмической вибрационной системы 400 для генерирования и распространения в грунт сигнала энергии сейсмических волн в виде последовательного во время сейсмического сигнала источника, который разделен в зависимости от времени, при этом сигнал содержит отличающуюся сигнатуру, рассмотренную выше и показанную на фиг. 2С и 3А. Сейсмическая вибрационная система 400 включает в себя реактивную массу 404 и опорный элемент 406, механически связанный с опорной плитой 408. Во время работы опорная плита 408 удерживается в физическом контакте с поверхностью 410 грунта. Сейсмическая вибрационная система 400 включает в себя генератор 414 электрической энергии, который обеспечивает электропитанием электрический привод 412. Устройство 416 сопряжения привода обеспечивает механическую, электрическую или магнитную связь между электрическим приводом 412 и реактивной массой 404. Во время работы электрический привод 412 в ответ на входной сигнал вызывает возвратно-поступательное движение реактивной массы 404 вдоль одной или нескольких осей, тем самым преобразуя входной сигнал в кинетическую энергию реактивной массы 404. Кинетическая энергия присутствует в виде вибрационного сигнала, который хорошо согласован с входным сигналом.
Сейсмическая вибрационная система 400 может также включать в себя контроллер 424 для управления электрическим приводом 412 и перемещением реактивной массы 404. Датчики 418, 420, 422 могут использоваться для контроля рабочих параметров системы 400. В одном осуществлении выходной сигнал с датчиков 418, 420, 422 может быть введен в цепь 426 регулирования по обратной связи для обеспечения управления перемещением реактивной массы 404 и тем самым лучшего регулирования выходной энергии системы 400, передаваемой в грунт, чтобы регулировать и поддерживать искажение на приемлемом уровне полного коэффициента гармоник.
Генератор 414 электрической энергии может быть любой подходящей системой, которая генерирует мощность, достаточную для сейсмической вибрационной системы 400. Для обеспечения электропитанием сейсмической вибрационной системы 400 генератор 414 электрической энергии может включать в себя любое подходящее устройство или сочетание устройств, включая, но без ограничения ими, бензиновый двигатель, дизельный двигатель и работающие на пропане или природном газе двигатели. В одном осуществлении генератор 414 электрической энергии может быть промышленной или коммерческой сетью электропитания. В одном осуществлении электрический генератор может быть трехфазным генератором мощностью 250 кВт, приводимым в движение силовым блоком мощностью от 300 до 400 л.с. (от 223,8 до 298,4 кВт). В нескольких осуществлениях генератор 414 электрической энергии обеспечивает электрической энергией электрический привод 412.
Электрический привод 412 может включать в себя привод любого типа, пригодный для перемещения тяжелой массы, такой как реактивная масса 404. Электрический привод 412 преобразует электрическую энергию, подводимую с генератора 414 электрической энергии, в механическую или магнитную энергию, достаточную для возвратно-поступательного движения реактивной массы 404. В одном осуществлении электрический привод 412 включает в себя вращающийся электрический двигатель или несколько вращающихся электрических двигателей. В одном примере может использоваться двигатель с короткозамкнутым ротором. В одном осуществлении электрический привод 412 включает в себя линейный электрический двигатель или несколько линейных электрических двигателей. В некоторых случаях статор жестко связан с опорной структурой реактивной массы 404, а один или несколько якорей могут быть жестко прикреплены к реактивной массе 404. В других примерах статор жестко связан с реактивной массой 404, а один или несколько якорей могут быть жестко прикреплены к опорной структуре. В нескольких осуществлениях электрический привод 412 может включать в себя электромагнитные устройства, расположенные на реактивной массе 404 или около нее.
В продолжение рассмотрения примера из фиг.4 устройство 416 сопряжения привода может включать в себя любое количество устройств или структур, пригодных для сопряжения электрического привода 412 с реактивной массой 404. Устройство 416 сопряжения привода может включать в себя коробку передач для преобразования энергии от электрического привода 412 в возвратно-поступательное движение реактивной массы 404. В одном осуществлении электрический привод 412 включает в себя линейный асинхронный двигатель, а устройство 416 сопряжения привода может быть электромагнитным устройством сопряжения. В нескольких осуществлениях энергию для возвратно-поступательного движения реактивной массы 404 можно подводить, используя одно или несколько электромагнитных устройств, расположенных внутри реактивной массы 404. В одном или нескольких осуществлениях энергию для возвратно-поступательного движения реактивной массы 404 можно подводить, используя одно или несколько электромагнитных устройств, расположенных за пределами реактивной массы 404.
Реактивная масса 404 может быть структурой, изготовленной из любого упругого металлического материала, такого как сталь, легированная сталь, или любого подходящего композиционного материала. Реактивная масса 404 может быть образована из монолитного элемента или может включать в себя несколько элементов, соответствующим образом связанных для образования реактивной массы 404. Массу реактивной массы 404 и массу опорной плиты 408 можно выбирать в соответствии с любым подходящим соотношением. Реактивная масса 404 может быть снабжена внутренней системой охлаждения, внешней системой охлаждения или любым сочетанием из них для поддержания электрического или электромагнитного привода 412 при соответствующей рабочей температуре в пределах от около 0°С до около 150°С. В некоторых осуществлениях массу реактивной массы можно выбирать так, чтобы она была как минимум в два раза больше массы опорной плиты 408. Реактивная масса может весить от около 2000 фунтов до около 15000 фунтов (от около 907 кг до около 6802,5 кг), от около 4000 фунтов до около 13000 фунтов (от около 1814 кг до около 5895,5 кг), от около 6000 фунтов до около 12000 фунтов (от около 2721 кг до около 5442 кг) или от около 15000 фунтов до около 40000 фунтов (от около 6802,5 кг до около 18140 кг). Масса опорного элемента 106 может рассматриваться как часть массы опорной плиты 408. Опорный элемент 406 может быть направляющей и стабилизирующей структурой.
Реактивная масса 404 согласно примеру из фиг.4 может перемещаться вдоль вертикальной оси для генерирования вибрационного сигнала в соответствии с используемым входным сигналом. При перемещении реактивной массы 404 таким путем усилие передается опорному элементу 406 один раз за цикл использования привода 412 и устройства 416 сопряжения привода. Опорный элемент 406 может быть жестко прикреплен к опорной плите 408 для обеспечения передачи кинетической энергии от реактивной массы 404 к опорной плите 408 через опорный элемент 406. Опорные элементы 406 можно изготавливать из любого упругого металлического материала, такого как сталь, легированная сталь, или любого подходящего композиционного материала, способного выдерживать силу, сообщаемую реактивной массой 404, и передавать кинетическую энергию от реактивной массы 404 к опорной плите 408. Опорный элемент 406 можно жестко прикреплять к опорной плите 408, используя любое подходящее механическое крепление, включая сварку, крепление болтами, крепление штырями или аналогичное. В некоторых случаях изоляторы, такие как воздушные подушки, используют для изоляции опорной плиты 408 от вибраций, создаваемых грузовиком для перевозки вибратора и двигателями. Таким образом, по существу вся энергия, сообщаемая опорной плите, является энергией возвратно-поступательного движения реактивной массы 404.
Опорную плиту 408 можно изготавливать из любого упругого металлического материала, такого как сталь, легированная сталь, или любого подходящего композиционного материала, способного выдерживать тяжесть реактивной массы 404. В одном осуществлении масса опорной плиты составляет примерно половину массы реактивной массы 404. В одном или нескольких осуществлениях масса опорной плиты может быть в пределах от около 1000 фунтов до около 8000 фунтов (от около 453,5 кг до около 3628 кг), от около 2000 фунтов до около 6000 фунтов (от около 907 кг до около 2721 кг) или от около 3000 фунтов до около 6000 фунтов (от около 1360,5 кг до около 2721 кг).
В одном осуществлении опорная плита 408 может быть спущена с транспортирующего устройства и помещена в контакт с поверхностью 410 грунта при использовании подъемной системы с гидравлическим или электрическим приводом. Подъемную систему можно выполнить так, чтобы вся масса транспортирующего устройства могла покоиться на опорной плите 408, тем самым будет создаваться направленная вниз сила 60000 фунтов (27210 кг) для поддержания контакта между опорной плитой 408 и поверхностью грунта при работе сейсмической вибрационной системы 100. При необходимости можно добавить внешний груз, чтобы гарантировать поддержание контакта между опорной плитой 408 и поверхностью 410 грунта в течение всего времени, пока сейсмическая вибрационная система работает.
В некоторых осуществлениях один или несколько датчиков 418, 420, 422 могут быть расположены на или в непосредственной близости к сейсмической вибрационной системе 400 для обеспечения контроля в реальном времени характеристик системы. В одном осуществлении один или несколько датчиков 418 движения частиц могут включать в себя, но без ограничения ими, одно- или многоосные акселерометры или геофоны, установленные вблизи системы 400, для наземного контроля перемещения, сообщаемого поверхности грунта 410 системой 410. В одном осуществлении один или несколько датчиков 420 движения частиц могут включать в себя, но без ограничения ими, датчики на основе микроэлектромеханических систем (МЭМС), аналоговые акселерометры с соответствующим аналого-цифровым преобразованием и/или датчики вибрации, установленные на системе 400. В одном осуществлении один или несколько датчиков 422 смещения могут включать в себя лазерные, индуктивные и/или датчики близости других типов для измерения смещения реактивной массы 404 относительно опорной плиты 408.
Датчики 418, 420, 422 могут использоваться для получения сигналов, подаваемых на контроллер 424. В одном осуществлении контроллер 424 может использоваться для обеспечения регулировок рабочих переменных, таких как ход, ускорение и частота сейсмической вибрационной системы 400, в ответ на параметры системы, контролируемые с использованием датчиков 418, 420, 422. В одном осуществлении широтно-импульсная модуляция может использоваться для регулирования тока, подводимого к приводу 412, чтобы осуществлять оптимизацию характеристик системы на основе подземных условий. Управляющие регулировки могут осуществляться в реальном времени с использованием сигналов обратной связи, получаемых во время работы вибратора 400.
Во время работы реактивная масса 404 может совершать возвратно-поступательное движение вдоль вертикальной оси, нормальной к поверхности грунта 410. Цикл возвратно-поступательного движения может начинаться при физическом контакте реактивной массы с опорным элементом 406, а реактивная масса 404 может находиться выше опорного элемента 406 на расстоянии от около 2 дюймов до около 6 дюймов (от 5 см до 15 см). В верхней точке хода реактивную массу 404 ускоряют вниз, используя гравитационную силу, электрическую энергию, механическую энергию или любое сочетание из них, и затем опять вверх с образованием возвратно-поступательного движения, при котором энергия передается опорному элементу 406. При возвратно-поступательном движении кинетическая энергия передается от реактивной массы 404 через опорный элемент 406 к опорной плите 408. Энергия, сообщаемая опорной плите 408 реактивной массой 404, создает продольную сейсмическую волну (P-волну), которая распространяется в поверхность грунта 410 и через нее. Время, необходимое реактивной массе 404 для перемещения в продолжение одного полного цикла колебаний (период цикла), определяет частоту сейсмических волн, генерируемых сейсмической вибрационной системой 400. В одном или нескольких осуществлениях период цикла для реактивной массы 404 может изменяться так, что совершаются от около 2 до около 300 циклов в секунду (герц).
В основу расчета электропитания, используемого для возвратно-поступательного движения реактивной массы 404, могут быть положены заданная частота и амплитуда сейсмических волн, передаваемых к поверхности грунта. В одном иллюстративном примере при реактивной массе 8000 фунтов (2985 кг), частоте 25 Гц (то есть 25 циклах в секунду), смещении около 4 дюймов (11 см) и ускорении 19,6 м/с2 в точке, где реактивная масса 404 передает усилие опорному элементу 406, минимальную мощность на входе около 270 кВт можно использовать для перемещения реактивной массы 404. В этом иллюстративном примере при возвратно-поступательном движении реактивной массы 404 в поверхность грунта 410 передается последовательность сейсмических волн, каждая из которых имеет энергию около 5400 фунт-сила-фут (7000 Дж).
На фиг.5 представлен еще один неограничивающий пример сейсмической вибрационной системы 500 для генерирования и распространения энергии сейсмических волн в поверхность грунта. Сейсмические поперечные волны (S-волны) можно вводить в поверхность грунта, используя показанную сейсмическую вибрационную систему 500. Как и на фиг.4, сейсмическая вибрационная система 500 может включать в себя реактивную массу 504 и опорный элемент 506, механически связанный с опорной плитой 508. Во время работы поддерживается физический контакт опорной плиты 508 с поверхностью 410 грунта. Сейсмическая вибрационная система 500 включает в себя генератор 414 электрической энергии, который обеспечивает электрической энергией привод 412. Устройство 416 сопряжения привода обеспечивает механическую, электрическую или электромагнитную связь между приводом 412 и реактивной массой 504. Во время работы электрический привод 412 вынуждает реактивную массу 504 совершать возвратно-поступательное движение вдоль одной или нескольких осей. Аналогично системе, показанной на фиг.4, сейсмическая вибрационная система 500 может также включать в себя контроллер 424 для управления электрическим приводом 412 и перемещением реактивной массы 504. Датчики 418, 420, 422 могут быть включены в цепь регулирования по обратной связи, обеспечивающую управление перемещением реактивной массы 504 и тем самым улучшенное регулирование выходного сейсмического сигнала системы 500.
Как и на фиг.4, система, показанная на фиг.5, может включать в себя генератор 414 электрической энергии, в одном примере 3-фазный генератор мощностью 250 кВт, приводимый в действие силовым блоком мощностью от 300 до 400 л.с. (от 223,8 до 298,4 кВт), предназначенный для снабжения электрической энергией электрического привода 412. Кроме того, как и на фиг.4, привод 412 может включать в себя, но без ограничения ими, вращающиеся электрические двигатели, линейные электрические двигатели, электромагнитные устройства или любое сочетание из них, расположенные на реактивной массе 504 или около нее. Система, показанная на фиг.5, может включать в себя устройство 416 сопряжения привода, включая, но без ограничения ими, механические устройства сопряжения, электромагнитные устройства сопряжения, индуктивные устройства сопряжения или сочетания из них, пригодные для создания возвратно-поступательного движения реактивной массы 504.
Аналогично фиг.4 реактивная масса 504 может быть изготовлена из стали, легированной стали, нержавеющей стали, нержавеющей легированной стали или других металлических композиционных материалов. В одном осуществлении реактивная масса 504 может быть изготовлена с использованием одного или нескольких композиционных материалов. В одном осуществлении реактивная масса 504 может быть монолитным элементом. В одном осуществлении реактивная масса 504 может иметь одно или несколько индуктивных или магнитных устройств, расположенных внутри или около реактивной массы 504. В одном осуществлении масса реактивной массы 504 может быть как минимум в два раза больше массы опорной плиты 508. В одном осуществлении реактивная масса 504 может весить от около 2000 фунтов до около 15000 фунтов (от около 907 кг до около 6802,5 кг), от около 4000 фунтов до около 13000 фунтов (от около 1814 кг до около 5895,5 кг) или от около 6000 фунтов до около 12000 фунтов (от около 2721 кг до около 5442 кг).
В одном осуществлении реактивная масса 504 может совершать возвратно-поступательное движение по горизонтальной оси (то есть вдоль оси, параллельной поверхности грунта), передавая усилие противостоящей стороне опорного элемента 506 один раз за цикл, тем самым сообщая поперечное движение опорной плите 508. Опорный элемент 506 может быть жестко прикреплен к опорной плите 508 для обеспечения передачи кинетической энергии от реактивной массы 504 к опорной плите 508 через опорный элемент 506. В одном осуществлении опорный элемент 506 может быть изготовлен из любого упругого металлического материала, такого как сталь, легированная сталь, или любого подходящего композиционного материала, способного выдерживать усилие, сообщаемое реактивной массе 504, и передавать кинетическую энергию от реактивной массы 504 к опорной плите 508. Реактивная масса 504 может быть снабжена внутренней системой охлаждения, внешней системой охлаждения или любым сочетанием из них для поддержания электрического или электромагнитного привода 512 при надлежащей рабочей температуре в пределах от около 0°С до около 150°С. В одном осуществлении опорный элемент 506 может быть жестко прикреплен к опорной плите 508 с использованием любого средства механического крепления, включая сварку, крепление болтами, крепление штырями или аналогичное. В одном осуществлении опорный элемент 506 может быть изготовлен за одно целое с опорной плитой 508.
Опорная плита 508 может быть изготовлена из любого упругого металлического материала, такого как сталь, легированная сталь, или любого подходящего композиционного материала, способного выдерживать передачу энергии от реактивной массы 504. В одном осуществлении масса опорной плиты 508 может быть равна примерно половине массы реактивной массы 504. В нескольких осуществлениях масса опорной плиты 508 может находиться в пределах от около 1000 фунтов до около 8000 фунтов (от около 453,5 кг до около 3658 кг), от около 2000 фунтов до около 6000 фунтов (от около 907 кг до около 2721 кг) или от около 3000 фунтов до около 6000 фунтов (от около 1360,5 кг до около 2721 кг).
В одном осуществлении опорная плита 508 может быть спущена с транспортирующего устройства и помещена в контакт с поверхностью 410 грунта с использованием подъемной системы с гидравлическим или электрическим приводом. Подъемную систему можно выполнять так, чтобы вся масса транспортировочного устройства могла покоиться на опорной плите 508, тем самым будет создаваться направленная вниз сила 60000 фунтов (27210 кг) для поддержания контакта между опорной плитой 508 и поверхностью грунта при работе сейсмической вибрационной системы 500. При необходимости можно добавлять внешний груз, чтобы гарантировать поддержание контакта между опорной плитой 508 и поверхностью 410 грунта в течение всего времени работы сейсмической вибрационной системы.
Датчики 418, 420, 422 могут быть расположены на или в непосредственной близости к сейсмической вибрационной системе 500 для обеспечения контроля в реальном времени характеристик системы. В одном осуществлении датчики 418 движения частиц могут включать в себя, но без ограничения ими, одно- или многоосные акселерометры, геофоны или аналогичные устройства, установленные вблизи системы 500 для контроля перемещения грунта, создаваемого системой 500. В одном осуществлении датчики 420 движения частиц могут включать в себя, но без ограничения ими, акселерометры и/или датчики вибрации, установленные на системе 500. В одном осуществлении для измерения смещения реактивной массы 504 датчики 422 смещения могут включать в себя лазерные, индуктивные и/или датчики близости других типов.
В одном осуществлении датчики 418, 420, 422 могут использоваться для получения сигналов, подаваемых на контроллер 424 с обратной связью. В одном осуществлении контроллер с обратной связью используется для обеспечения регулировок рабочих переменных, таких как ход, ускорение и частота сейсмической вибрационной системы 500, в ответ на подземные условия. В одном осуществлении широтно-импульсная модуляция может использоваться для точного регулирования тока, подводимого к приводу 412, чтобы осуществлять оптимизацию характеристик системы на основе подземных условий. Управляющие регулировки могут осуществляться в реальном времени с использованием сигналов обратной связи, получаемых во время работы вибратора 500.
Электрический привод 412 может использоваться для осуществления через устройство 416 сопряжения привода возвратно-поступательного движения реактивной массы 504 по оси, параллельной поверхности грунта 410. В одном или нескольких осуществлениях цикл возвратно-поступательного движения реактивной массы может начинаться при физическом контакте с опорным элементом 506. Реактивная масса 504 может смещаться в осевом направлении от около 2 дюймов до около 6 дюймов (от 5 см до 15 см), при этом в первом направлении вдоль горизонтальной оси реактивная масса 504 приводится в физический контакт с опорным элементом 506. После этого реактивная масса 504 может ускоряться во втором направлении, на 180° противоположном первому направлению, вдоль идентичной горизонтальной оси, до тех пор, пока реактивная масса 504 снова не придет в контакт с опорным элементом 506.
Усилие реактивной массы 504 может передаваться через опорный элемент 506 к опорной плите 508. Поскольку опорная плита 508 контактирует с поверхностью 410 грунта, энергией, сообщаемой опорной плите, создается поперечная или S-волна, которая распространяется сквозь поверхность грунта 410. Время, необходимое реактивной массе 504 для совершения движения в течение одного полного цикла возвратно-поступательного движения (период цикла), определяет частоту S-волн, генерируемых сейсмической вибрационной системой 500. В одном осуществлении количество периодов цикла может изменяться от около 2 до около 300 периодов в секунду (герц).
На фиг.6 показан еще один неограничивающий пример иллюстративной установки для получения геофизической информации, используемой при построении изображения подземных структур. В одном или нескольких осуществлениях сейсмическая вибрационная система 600 включает в себя реактивную массу 604 и опорный элемент 606, механически соединенный с опорной плитой 608 или прикрепленный к ней. Во время работы опорная плита 608 поддерживается в контакте с поверхностью грунта 410. В одном осуществлении сейсмическая вибрационная система 600 может включать в себя линейный электрический двигатель 630. В одном осуществлении один или несколько линейных электрических двигателей 630 могут включать в себя один или несколько статоров 634, связанных с опорной структурой вибратора, и один или несколько якорей 632, связанных с реактивной массой 604. В других осуществлениях положения статора (статоров) и ротора (роторов) могут быть изменены на обратные. В одном осуществлении сейсмическая вибрационная система 600 включает в себя датчики 418, 420, 422 в связи с контроллером 424. В одном осуществлении выходной сигнал с контроллера 424 может использоваться для управления линейным электрическим двигателем 630 и тем самым регулирования сейсмического сигнала источника, генерируемого сейсмической вибрационной системой 600.
В одном осуществлении линейный электрический двигатель 630 может включать в себя линейный асинхронный двигатель (ЛАД) для получения высокого ускорения реактивной массы 604. Конструкция линейного асинхронного двигателя может иметь активную трехфазную обмотку, образующую один или несколько статоров 334 и одну или несколько пассивных проводящих пластин 632 в физическом соединении с реактивной массой 604 и прикрепленных к ней.
В одном осуществлении линейный электрический двигатель 630 может включать в себя линейный синхронный двигатель (ЛСД), способный обеспечивать высокие частоту вращения и мощность при меньшем ускорении, чем сравнимый линейный асинхронный двигатель. Конструкция линейного синхронного двигателя может иметь активную обмотку, образующую один или несколько статоров 634 и группу полюсных электромагнитов 632 в физическом соединении с реактивной массой 604 и прикрепленных к ней. В случае конструкции линейного синхронного двигателя один или несколько магнитов 632 могут быть постоянными магнитами или электромагнитами.
Как показано на фиг.6, реактивная масса 604 может совершать возвратно-поступательное движение вдоль вертикальной оси, нормальной к поверхности грунта 410. При использовании одного или нескольких линейных электрических двигателей 630 реактивная масса 604 может быть поднята выше нейтрального положения на расстояние от около 2 дюймов до около 6 дюймов (от 5 см до 15 см) и ускорена вниз с использованием гравитационной силы, линейного электрического двигателя или любого сочетания из них, и снова приведена в возвратно-поступательное движение, при котором энергия передается к опорному элементу 606. При возвратно-поступательном движении кинетическая энергия передается через опорный элемент 606 от реактивной массы 604 к опорной плите 608. Энергией, сообщаемой опорной плите 608 от реактивной массы 604, создается продольная сейсмическая волна (P-волна), которая распространяется в поверхность грунта 410. Время, необходимое реактивной массе 604 для совершения движения в течение одного полного цикла возвратно-поступательного движения (период цикла), определяет частоту сейсмических волн, генерируемых сейсмической вибрационной системой 600. Количество периодов цикла для реактивной массы может изменяться от около 2 до около 300 периодов в секунду (герц).
Датчики 418, 420, 422 могут быть расположены на сейсмической вибрационной системе 600 или в непосредственной близости к ней для обеспечения контроля в реальном времени характеристик системы. В одном осуществлении датчики 418 движения частиц, размещенные вблизи системы, могут включать в себя, но без ограничения ими, одно- или многоосные акселерометры или геофоны для контроля перемещения грунта, сообщаемого системой 600. В одном осуществлении датчики 420 движения частиц, связанные с системой 600, могут включать в себя, но без ограничения ими, акселерометры и/или датчики вибрации для измерения перемещения компонентов системы. В одном осуществлении один или несколько датчиков 420 движения частиц могут включать в себя, но без ограничения ими, датчики на основе микроэлектромеханических систем (МЭМС), аналоговые акселерометры с соответствующим аналого-цифровым преобразованием и/или датчики вибрации, установленные на системе 600. Во время работы датчики 422 смещения могут использоваться для измерения смещения или положения реактивной массы 604 и могут включать в себя лазерные, индуктивные и/или датчики близости других типов.
В одном осуществлении датчики 418, 420, 422 могут использоваться для получения сигналов, подаваемых на контроллер 424 по цепи 326 обратной связи. В одном осуществлении контроллер с обратной связью может создавать один или несколько выходных сигналов для регулирования рабочих переменных, таких как ход, ускорение и частота сейсмической вибрационной системы 600, в ответ на оцениваемые рабочие параметры. В одном осуществлении широтно-импульсная модуляция может использоваться для регулирования тока, подводимого к приводу 412, чтобы осуществлять оптимизацию характеристик системы на основе подземных условий. Управляющие регулировки могут осуществляться в реальном времени с использованием сигналов обратной связи, получаемых во время работы сейсмической вибрационной системы 600.
На фиг.7 показан еще один неограничивающий пример иллюстративной установки для генерирования и распространения сейсмического сигнала источника в грунт. Сейсмическая вибрационная система 700 согласно этому примеру включает в себя реактивную массу 704 и опорный элемент 706, механически соединенный с опорной плитой 708 или прикрепленный к ней. Во время работы поддерживается контакт опорной плиты 708 с поверхностью грунта 410. В одном или нескольких осуществлениях сейсмическая вибрационная система 700 может включать в себя один или несколько линейных электрических двигателей 730. Линейный электрический двигатель 730 может включать в себя один или несколько статоров 734, связанных с опорной структурой вибратора, и один или несколько якорей 732 в физическом соединении с реактивной массой 704 и прикрепленных к ней. В других осуществлениях положения статоров и якорей могут быть изменены на обратные. Сейсмическая вибрационная система 700 может включать в себя один или несколько датчиков 418, 420, 422 в связи с контроллером 424. Выходной сигнал с контроллера 424 может использоваться для управления электрическими двигателями 730 и тем самым регулирования сейсмического сигнала источника, генерируемого сейсмической вибрационной системой 700.
Линейные электрические двигатели 730 могут включать в себя линейный асинхронный двигатель (ЛАД) или линейный синхронный двигатель (ЛСД). Линейный электрический двигатель 730 может быть расположен внутри реактивной массы 704. В одном осуществлении один или несколько статоров 734 могут быть жестко прикреплены к опорному элементу 706, который также связан с опорной структурой вибратора, а якоря 732 могут быть прикреплены к реактивной массе 704; тем самым создаются индуктивные силы между статором 734 и якорями для вибрации реактивной массы 704 вдоль вертикальной оси.
При возвратно-поступательном движении реактивной массы 704 кинетическая энергия передается через опорный элемент 706 (при использовании его) от реактивной массы 704 к опорной плите 708. При передаче энергии образуется продольная сейсмическая волна (P-волна), которая распространяется в поверхность грунта 410. Время, необходимое реактивной массе 704 для перемещения в течение одного полного цикла возвратно-поступательного движения (период цикла), определяет частоту сейсмических волн, генерируемых сейсмической вибрационной системой 700. В одном или нескольких осуществлениях количество периодов цикла реактивной массы может изменяться от около 2 до около 300 периодов в секунду (герц).
Датчики 418, 420, 422 могут быть расположены на или в непосредственной близости к сейсмической вибрационной системе 700 для обеспечения контроля в реальном времени характеристик системы. В одном осуществлении датчики 418 движения частиц могут быть размещены на грунте вблизи системы 700 для контроля перемещения грунта, сообщаемого системой 700. Наземные датчики 418 могут включать в себя, но без ограничения ими, одно- или многоосные акселерометры или геофоны. Другие датчики 420 движения частиц могут быть связаны с системой 700 для оценивания перемещения компонент вибратора во время работы. В одном осуществлении один или несколько датчиков движения частиц 420 могут включать в себя, но без ограничения ими, датчики на основе микроэлектромеханических систем (МЭМС), аналоговые акселерометры с соответствующим аналого-цифровым преобразованием и/или датчики вибрации, установленные на системе 700. Датчики 422 положения могут использоваться для оценивания положения реактивной массы 704 во время работы. Эти датчики положения могут включать в себя лазерные, индуктивные и/или датчики близости других типов для измерения смещения реактивной массы 704.
В одном осуществлении датчики 418, 420, 422 могут использоваться для получения сигналов, подаваемых на контроллер 424 по цепи 426 обратной связи. В одном осуществлении контроллер 424 может выдавать один или несколько выходных сигналов для регулирования рабочих переменных, таких как ход, ускорение и частота сейсмической вибрационной системы 700, в ответ на подземные условия. В одном осуществлении широтно-импульсная модуляция может использоваться для регулирования тока, подводимого к приводу, такому как привод 412, рассмотренному выше и показанному на фиг.4, чтобы осуществлять оптимизацию характеристик системы на основании подземных условий. Управляющие регулировки могут осуществляться в реальном времени с использованием сигналов обратной связи, получаемых во время работы сейсмической вибрационной системы 700.
При использовании способы согласно раскрытию включают в себя генерирование множества сигналов сейсмических источников с использованием нескольких наземных сейсмических вибраторов, расположенных на или вблизи ландшафта, представляющей интерес. Применительно к нескольким осуществлениям, описанным выше и показанным на фигурах 1-7, наземные сейсмические вибраторы могут быть перевезены на сейсморазведочную площадь. Затем опорную плиту каждого вибратора связывают с поверхностью грунта. В одном осуществлении транспортирующее устройство может быть снабжено гидравлическим или электрическим подъемником, так что масса транспортирующего устройства будет покоиться на опорной плите. При необходимости дополнительный внешний груз может быть добавлен к транспортирующему устройству, чтобы гарантировался надежный контакт между опорной плитой и поверхностью грунта в течение всего времени работы вибратора. Датчики безопасности могут быть установлены на подъемном механизме для предупреждения относительно отсутствия спуска опорной плиты перед работой или отсутствия подъема опорной плиты перед движением транспортирующего устройства. Реактивная масса движется возвратно-поступательно вдоль одной или нескольких осей при использовании управляемого обратной связью электрического линейного двигателя или управляемого обратной связью гидравлического исполнительного механизма. Кинетическая энергия от совершающей возвратно-поступательное движение реактивной массы передается к опорной плите, а сигнал сейсмического источника распространяется в грунт. Как описано выше, возвратно-поступательное движение реактивной массы можно осуществлять, используя управляемый по цепи обратной связи линейный асинхронный двигатель, или линейный асинхронный двигатель, или управляемое гидравлическое исполнительное устройство. При использовании осуществлений с электрическим двигателем устройство сопряжения привода может использоваться для передачи энергии от электрического двигателя к реактивной массе.
Исполнительным устройством или двигателем и движением реактивной массы можно управлять, используя контроллер для формирования энергии в виде множества последовательных во времени вибрационных сигналов, при этом вибрационные сигналы разделены в зависимости от времени, каждый из множества сигналов содержит отличающуюся сигнатуру, а согласно нескольким осуществлениям рабочие параметры можно контролировать, используя датчики, размещенные в/на каждом сейсмическом вибраторе или около него. Выходной сигнал, показывающий оцениваемые рабочие параметры, может передаваться на контроллер по цепи обратной связи, а контроллер может использоваться для регулирования в реальном времени во время работы ускорения, скорости, силы, частоты, хода или других параметров сейсмического вибратора, чтобы снижать полный коэффициент гармоник до около 5% или регулировать полный коэффициент гармоник до меньшего значения. Широтно-импульсную модуляцию можно использовать для регулирования в реальном времени протекания тока к сейсмической вибрационной системе, чтобы осуществлять оптимизацию характеристик системы на основании наблюдаемых подземных условий.
Другие осуществления включают в себя способы регистрации сейсмической информации и обработки сейсмической информации. В одном осуществлении способ регистрации сейсмической информации включает в себя устройство в заданное положение множества сейсмических приемников на ландшафте, представляющем интерес. Приемники используют для приема множества последовательных во времени вибрационных сигналов, которые генерируют так, как описано выше, при этом вибрационные сигналы разделяют в зависимости от времени. Каждый сигнал включает в себя отличающуюся сигнатуру, которая может быть выделена на приемнике, на полевом процессоре или на устройстве для обработки на расстоянии от ландшафта, представляющего интерес.
В еще одном осуществлении способ обработки сейсмической информации включает в себя прием регистрируемой сейсмической информации. Регистрируемая информация образуется при сейсмической разведке, когда множество сейсмических вибраторов генерируют сигналы, описанные выше, и эти сигналы принимают сейсмическими приемниками и регистрируют на регистрирующей среде. Регистрируемая сейсмическая информация включает в себя последовательные во времени вибрационные сигналы, генерируемые на вибраторах, после излучения этих сигналов в грунт и отражения от подземных пластов. Вибрационные сигналы разделяют в зависимости от времени, при этом каждый из множества сигналов содержит отличающуюся сигнатуру. Затем регистрируемые сейсмические сигналы обрабатывают для выделения сейсмической информации применительно к каждому из множества сигналов.
Настоящее раскрытие следует воспринимать как иллюстративное, а не как ограничивающее объем или сущность формулы изобретения, приведенной ниже. После изучения раскрытия для специалистов в данной области техники будут очевидными многочисленные модификации и варианты, включая использование эквивалентных функционалов и/или структурных замен элементов, описанных в этой заявке, использование эквивалентных функциональных связей для связей, описанных в этой заявке, и/или использование эквивалентных функциональных действий для действий, описанных в этой заявке. Такие видимые изменения считаются находящимися в объеме формулы изобретения, приведенной ниже.
При наличии приведенного выше раскрытия общих концепций и конкретных осуществлений объем защиты определяется формулой изобретения, прилагаемой к этой заявке. Признаки формулы изобретения не должны восприниматься как ограничивающие право заявителя на раскрытые притязания, буквально, на пока еще не заявленный объект изобретения в виде одной или нескольких дополнительных заявок, включая заявки, подаваемые в соответствии с законами США и/или международным договором.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКИЙ ВИБРАТОР, УПРАВЛЯЕМЫЙ С ПРЯМЫМ ОБНАРУЖЕНИЕМ ПЕРЕМЕЩЕНИЯ ПЛИТЫ ОСНОВАНИЯ | 2010 |
|
RU2503976C2 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2570587C1 |
| КОНТРОЛЬ КАЧЕСТВА ДЛЯ ШИРОКОПОЛОСНЫХ СВИП-СИГНАЛОВ | 2014 |
|
RU2665346C2 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2017 |
|
RU2644442C1 |
| Способ вибрационной сейсморазведки | 2018 |
|
RU2695057C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2016 |
|
RU2627549C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2015 |
|
RU2593782C1 |
| СПОСОБ ПРОФИЛИРОВАНИЯ СВИП-СИГНАЛА ВИБРАТОРА | 2003 |
|
RU2344443C2 |
| ФАЗОВАЯ МОДУЛЯЦИЯ И МИНИМИЗАЦИЯ ШУМА ПРИ ОДНОВРЕМЕННЫХ ВИБРОСЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЯХ | 2013 |
|
RU2573125C1 |
| УВЕЛИЧЕНИЕ СПЕКТРА НИЗКИХ ЧАСТОТ ВИБРОСЕЙСМИЧЕСКИХ ДАННЫХ ПРИ ОДНОВРЕМЕННОЙ МОРСКОЙ СЪЕМКЕ | 2012 |
|
RU2591231C2 |


Изобретение относится к области геофизики и может быть использовано при проведении сейсмических разведочных работ. Предложены способ и устройство для генерирования сейсмического сигнала источника, предназначенные для генерирования энергии в виде множества последовательных во времени вибрационных сигналов, разделенных в зависимости от времени. Каждый из множества вибрационных сигналов содержит множество фрагментов, разделенных от свип-сигнала так, что каждый из фрагментов имеет разделение свип-частот, отличное от других фрагментов. Каждый из вибрационных сигналов содержит отличающуюся сигнатуру фрагментов, отличную от других вибрационных сигналов. При выполнении сейсмической разведки разделенные вибрационные сигналы излучают на ландшафт, представляющий интерес, в качестве сейсмических сигналов. Технический результат: экспресс-сбор данных об исследуемом объекте с повышением их достоверности. 4 н. и 20 з.п. ф-лы, 7 ил.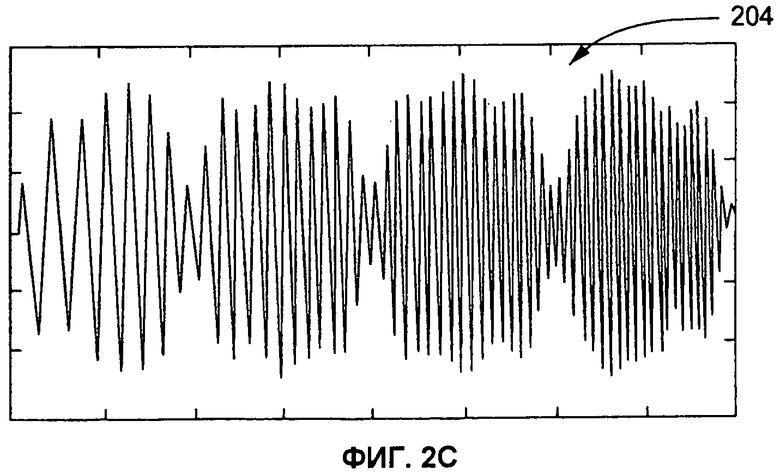
1. Способ генерирования сейсмических сигналов источника, заключающийся в том, что генерируют энергию в виде множества вибрационных сигналов, при этом вибрационные сигналы представляют собой последовательные во времени сигналы, разделенные в зависимости от времени, где каждый из множества вибрационных сигналов содержит множество фрагментов, разделенных от свип-сигнала так, что каждый из фрагментов имеет разделение свип-частот, отличное от других фрагментов, причем каждый из вибрационных сигналов содержит отличающуюся сигнатуру фрагментов, отличную от других вибрационных сигналов, и излучают вибрационные сигналы на ландшафт, представляющий интерес, в качестве сейсмических сигналов источника.
2. Способ по п.1, в котором сигналы из множества вибрационных сигналов разделяют по частоте в зависимости от времени.
3. Способ по п.1, в котором сигналы из множества вибрационных сигналов разделяют по фазе в зависимости от времени.
4. Способ по п.1, в котором множество вибрационных сигналов излучают на ландшафт, представляющий интерес, асинхронно.
5. Способ по п.1, в котором множество вибрационных сигналов излучают на ландшафт, представляющий интерес, с по меньшей мере частичным перекрытием во времени.
6. Способ по п.1, в котором множество вибрационных сигналов излучают на ландшафт, представляющий интерес, по существу, одновременно.
7. Способ по п.1, в котором генерирование энергии включает в себя использование множества наземных сейсмических вибраторов, расположенных на ландшафте, представляющем интерес.
8. Способ по п.1, в котором генерирование энергии включает в себя использование наземного сейсмического вибратора, который включает в себя электрический линейный двигатель, перемещающий реактивную массу, при этом электрический линейный двигатель имеет контроллер с обратной связью для снижения искажения излучаемой энергии.
9. Способ по п.1, в котором генерирование энергии включает в себя использование наземного сейсмического вибратора, который включает в себя гидравлическую систему, перемещающую реактивную массу, при этом гидравлическая система имеет контроллер с обратной связью для снижения искажения излучаемой энергии.
10. Способ регистрации геофизической информации, заключающийся в том, что устанавливают в заданное положение множество сейсмических приемников на ландшафте, представляющем интерес,
принимают множество сейсмических сигналов источника множеством сейсмических приемников, при этом сейсмические сигналы источника представляют собой последовательные во времени сигналы, разделенные в зависимости от времени, где каждый из множества сейсмических сигналов источника содержит множество фрагментов, разделенных от свип-сигнала так, что каждый из фрагментов имеет разделение свип-частот, отличное от других фрагментов, причем каждый из вибрационных сигналов содержит отличающуюся сигнатуру, отличную от других вибрационных сигналов.
11. Способ по п.10, в котором сигналы из множества сейсмических сигналов источника разделяют по частоте в зависимости от времени.
12. Способ по п.10, в котором сигналы из множества сейсмических сигналов источника разделяют по фазе в зависимости от времени.
13. Способ по п.10, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, асинхронно.
14. Способ по п.10, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, с по меньшей мере частичным перекрытием во времени.
15. Способ по п.10, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, по существу, одновременно.
16. Способ обработки геофизической информации, заключающийся в том, что принимают регистрируемую сейсмическую информацию, при этом регистрируемая сейсмическая информация включает в себя множество сейсмических сигналов, источника, причем сейсмические сигналы источника, представляют собой последовательные во времени сигналы, разделенные в зависимости от времени, где каждый из множества сейсмических сигналов источника содержит множество фрагментов, разделенных от свип-сигнала так, что каждый из фрагментов имеет разделение свип-частот, отличное от других фрагментов, причем каждый из сейсмических сигналов источника содержит отличающуюся сигнатуру, отличную от других сейсмических сигналов источника, обрабатывают сейсмическую информацию для выделения сейсмической информации применительно к каждому из множества сейсмических сигналов источника.
17. Способ по п.16, в котором сигналы из множества сейсмических сигналов источника разделяют по частоте в зависимости от времени.
18. Способ по п.16, в котором сигналы из множества сейсмических сигналов источника разделяют по фазе в зависимости от времени.
19. Способ по п.16, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, асинхронно.
20. Способ по п.16, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, с по меньшей мере частичным перекрытием во времени.
21. Способ по п.16, в котором множество сейсмических сигналов источника излучают на ландшафт, представляющий интерес, по существу, одновременно.
22. Сейсмическое вибрационное устройство, содержащее опорную плиту, которая связана с поверхностью грунта, реактивную массу, которая перемещается относительно опорной плиты, и управляемое обратной связью исполнительное устройство, связанное с реактивной массой, при этом управляемое обратной связью исполнительное устройство прилагает силу к реактивной массе, которая вызывает линейное перемещение реактивной массы, линейное перемещение реактивной массы порождает сейсмическую энергию, распространяющуюся в грунт, причем сейсмическая энергия существует в виде множества последовательных во времени сейсмических сигналов, сейсмические сигналы разделены в зависимости от времени, причем каждый из множества сейсмических сигналов содержит множество фрагментов, разделенных от свип-сигнала так, что каждый из фрагментов имеет разделение свип-частот, отличное от других фрагментов, причем каждый из вибрационных сигналов содержит отличающуюся сигнатуру, отличную от других вибрационных сигналов.
23. Устройство по п.22, в котором управляемое обратной связью исполнительное устройство включает в себя гидравлическое исполнительное устройство.
24. Устройство по п.22, в котором управляемое обратной связью исполнительное устройство включает в себя электрический линейный двигатель.
| Карточка для статистических и т.п. записей | 1926 |
|
SU8398A1 |
| МЕХАНИЧЕСКАЯ ФОРСУНКА | 1926 |
|
SU7911A1 |
| RU 94045331 А1, 27.04.1997 | |||
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1999 |
|
RU2159945C1 |
| НАЗЕМНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ВИБРАЦИОННЫЙ СЕЙСМОИСТОЧНИК | 2004 |
|
RU2253136C1 |
| US 5412623 A1, 02.05.1995 | |||
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| US 3881167 A, 29.04.1975 | |||
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1996 |
|
RU2122220C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ СЫПУЧИХ ВЕЩЕСТВ | 0 |
|
SU266054A1 |
| US 6603707 B1, 05.08.2003. | |||

